1. Introduction
Plate-like structures are widely used in the fields of mechanical engineering, civil engineering, aerospace engineering and so on. During the fabrication and service process, plate-like structures inevitably undergo various degrees of damage with the possibility of failure under extreme conditions and environment. Structural health monitoring (SHM) based on Lamb waves is an important means to effectively monitor the structural safety and predict the service life of structures, due to its outstanding advantages of low attenuation, long propagation distance, large detection area and, most importantly, high sensitivity to structural damage and material inhomogeneity [
1,
2,
3,
4]. However, phenomena like dispersion, multimodes and the mode conversion (change in wave velocity when the wave interacts with structural discontinuities or boundaries) of Lamb waves make reliable damage localization a challenging task, because it is difficult to effectively extract damage features from the received signals.
In the process of damage localization, the typical detection technology is to refer to the baseline signals, namely, to compare the signals in the current state with those in the healthy state. A scattered signal containing some damage-related information (location, size, orientation, type) can be obtained by performing reference signal subtraction. The time of flight (ToF), which corresponds to the time taken by the wave packet to travel from an actuator to a sensor along a certain path, is a straightforward feature of the damage-scattered signal for damage localization. The ellipse and hyperbola algorithms become the two most important methods for locating defects based on the ToF in plate-like structures [
5,
6,
7,
8,
9,
10].
This technology will be very effective and accurate if damage is the only factor causing the change in the baseline signals. In practice, operational and environmental conditions, such as stress, load, temperature, etc., are constantly changing, which may lead to significant changes in the baseline signals and can easily overwhelm the signal changes caused by damage [
11,
12]. This could cause significant errors and may even corrupt the damage localization results.
To overcome such drawbacks, baseline-free damage detection algorithms have become a focus in the development of SHM. An instantaneous baseline can be obtained through a comparison between different sensor pairs that have a similar path [
13], but the distance of each pair must be kept identical. A large number of undamaged wave-propagating paths are also required, which may not be satisfied simultaneously in practice. The time reversal method (TRM) is widely used as a promising candidate for baseline-free damage detection in thin-walled plate/shell-like structures [
14]. It is based on the concept of spatial reciprocity and time-reversal invariance, originally observed in acoustic waves [
15]. This is due to an input signal, which can be reconstructed at the source transducer, when the output signal measured at the receiver transducer is time-reversed and emitted back. Liu et al. [
16] combined the probability imaging algorithm with the virtual time reversal method to study the damage in a composite board by air-coupled sensors; the effects of the damage type and size on the probability imaging algorithm were discussed to achieve the baseline-free detection. Huang et al. [
17] proposed a reciprocity index-based probabilistic imaging algorithm to achieve the baseline-free identification of delamination on the path of a piezoelectric piece. Kannusamy et al. [
18] presented a refined time reversal method in conjunction with the probability imaging algorithm for baseline-free damage localization in thin plates, using a sparse array arrangement of piezoelectric wafer transducers.
However, the aforementioned methods need a lot of actuators/sensors to form enough monitoring paths for damage localization. Damage in the survey areas, but not covered by the monitoring paths, is hard to detect accurately. To circumvent these limitations, damage can be detected and localized anywhere in the monitoring areas by using the ToF of the damage-scattered signals. Wang and Yuan [
19] applied the time reversal method on the scattered signals so as to focus on the damage location and achieve the baseline-free damage imaging using a delay and sum algorithm. Jeong et al. [
20] obtained the ToF information using the time reversal of a scattered Lamb wave and constructed a baseline-free localization image by a beamforming technique. Jun and Lee [
21] proposed a new baseline-free technique, which combined a hybrid time reversal method with a beamforming method using the ToF of the wave packets generated by the damage. In general, TRM often requires a programmable transducer array to synthesize time-reverse signals simultaneously, which limits its application due to the complexity and cost of the hardware system. Therefore, a baseline-free method without complex manipulation, such as time-reversal based on the ToF information, is urgently needed.
In addition to the ToF of the scattered signals, the time difference of arrival (TDOA) between two scattered signals can also be used for damage localization. This method utilizes the difference in the ToF to localize damage based on the intersection of hyperbolas. Yelve et al. [
22] introduced a baseline-free method based upon the TDOA of nonlinear Lamb waves to localize barely visible impact damage in composite laminates. Li et al. [
23] introduced a probability-based hyperbola diagnostic imaging method based on the different ToFs of the damage signals to achieve the baseline-free damage localization and imaging. This method required at least twice as many transducers as in the general hyperbola method to form sufficient pairs of two sensors. This study aims to achieve baseline-free damage localization by the hyperbola algorithm using far fewer transducers. A new array composed of these transducers can not only eliminate the direct wave, but can also make the boundary reflection signal, and other noise, cancel each other out. The proposed baseline-free method is expected to be more convenient and effective in engineering practice.
According to the aforementioned research, a crucial step of the baseline-free damage imaging, based on the ToF, is to extract the damage-scattered signals accurately. In this paper, a novel baseline-free method for damage localization was presented, including a peculiar symmetrical array of PZT actuators/sensors to eliminate the direct waves from the received signals. Meanwhile, the cross-correlation method (CCM) was introduced to determine the sequence of time difference accurately from the damage-scattered waves. The damage was identified and localized by a hyperbolic algorithm with only one branch of the hyperbolic curve. To demonstrate the feasibility and the effectiveness of the proposed strategy, numerical simulation and experimental validation were carried out to localize a through-thickness hole in an aluminum plate. The influence of different damage locations and array forms on the damage localization results was discussed.
2. Methodology for Baseline-Free Damage Localization
Lamb wave based damage localization is based on the fundamental idea that a traveling wave in a plate structure will be scattered by the damage. Note that the damage location is usually determined by the group velocity and the ToF of the scattered Lamb waves. While the group velocity of a certain Lamb wave mode is often determined in a homogenous and isotropic plate structure, the ToF information becomes a key factor in damage localization. There are many imaging and localizing methods based on the ToF, including ellipse and hyperbola algorithms.
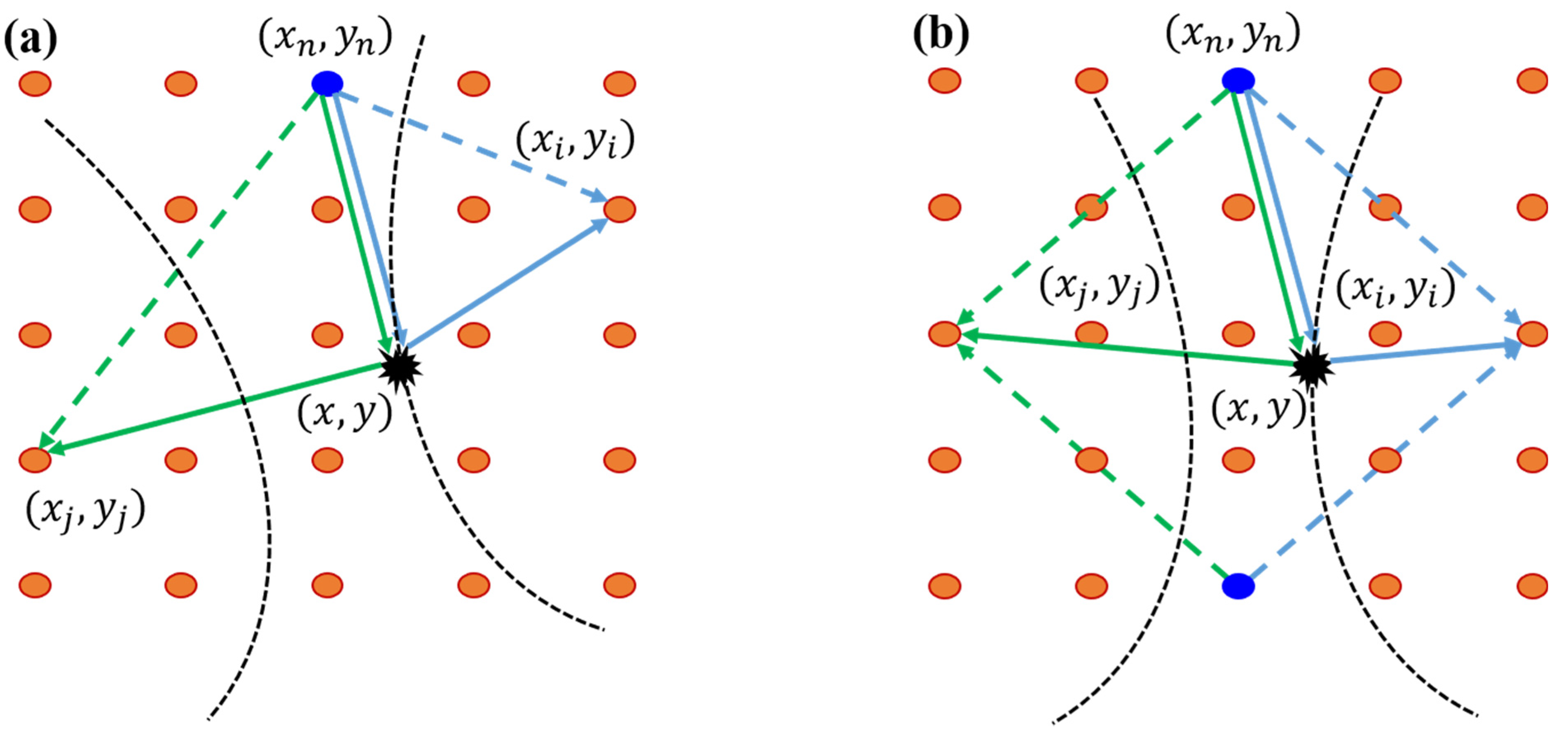
Whereas the ellipse algorithm considers two transducers to be acting in pairs, the hyperbola algorithm mainly considers combinations of one actuator (transmitter),
, and pairs of sensors (receivers),
and
, in a spatially distributed array, as shown in
Figure 1a. Without the loss of generality, a received signal on the sensing path consists, at least, of a direct signal and a scattered signal. If a damage is positioned at the point
, the difference in arrival time of the scattered signals at the two sensors is defined as:
where
and
are the distances from the actuator to the damage, and then to the two sensors, respectively. Further,
is the velocity of the signals. Since the distance from the actuator to the damage is the same for both sensors (
Figure 1a), it does not affect the difference in the arrival time. Equation (1) can then be simplified as [
24]:
where
and
are the coordinates of the two sensors, respectively. The solution of Equation (2) is a hyperbola with its foci on the two sensors. By performing this for all the available
groups of sensors, the damage location in the sensor network is obtained as the intersection point of all the hyperbolas. The time difference of the scattered signals is a robust feature of the wave signals, for which it is not necessary to know the time origin of the excitation.
In general, the scattered signals are always subtracted by the corresponding baselines in the intact state, depicted by:
where
is the scattered signal for the sensor
,
is the received signal for the sensor
in the intact state, which is the state without damage in the structure, and
is the received signal for the sensor
in the current state. The same processing is carried out for the sensor
. To realize baseline-free localization and imaging, a novel symmetrical sensor arrangement is presented to eliminate the direct propagating waves and extract the damage-scattered waves in this paper. As shown in
Figure 1b, one actuator is placed in the perpendicular bisector of the line segment connecting the two sensors, while one actuator and two sensors are located in random positions in the typical sensor array. This form of array can be in a diamond or square shape, as long as the diagonals of the array are perpendicular to each other. Since the distances between the actuator and the two sensors are equal, according to vertical theorem in mathematics, the direct propagating signals on the two sensors from the actuator are almost identical. Under this situation, the damage-scattered signals can be extracted by subtracting the two received signals in the current state, which is described by:
where
is the damage-scattered signal;
and
are the received signals for the sensors
and
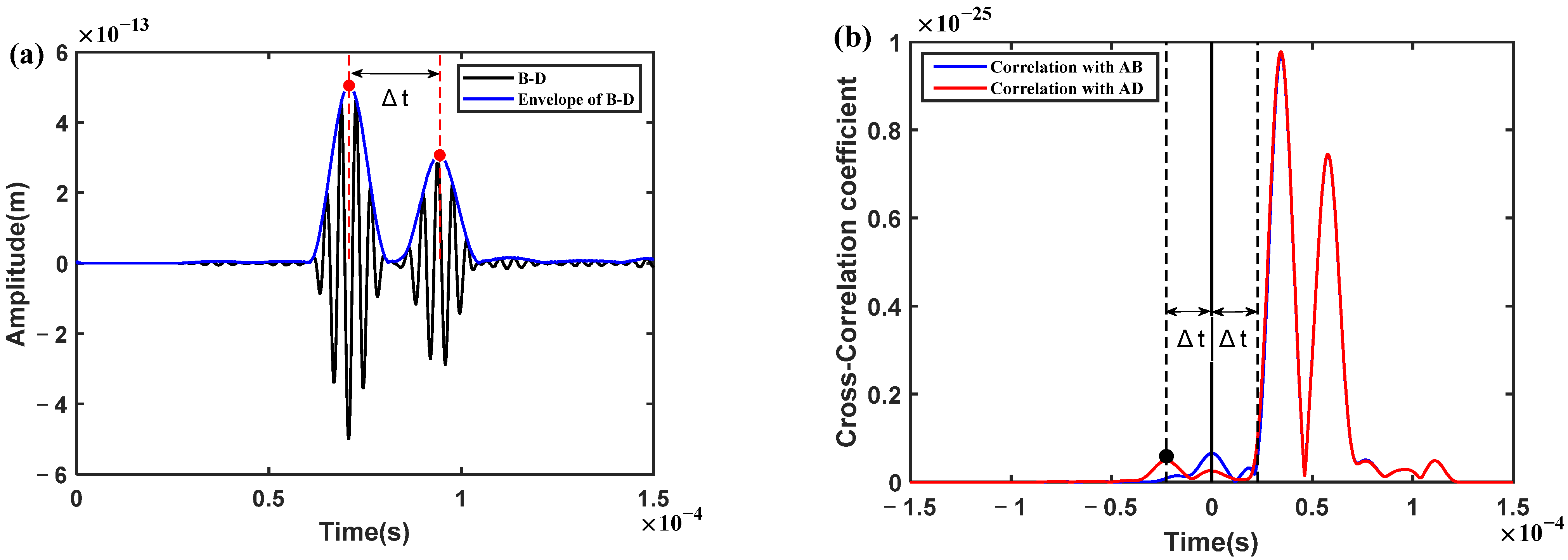
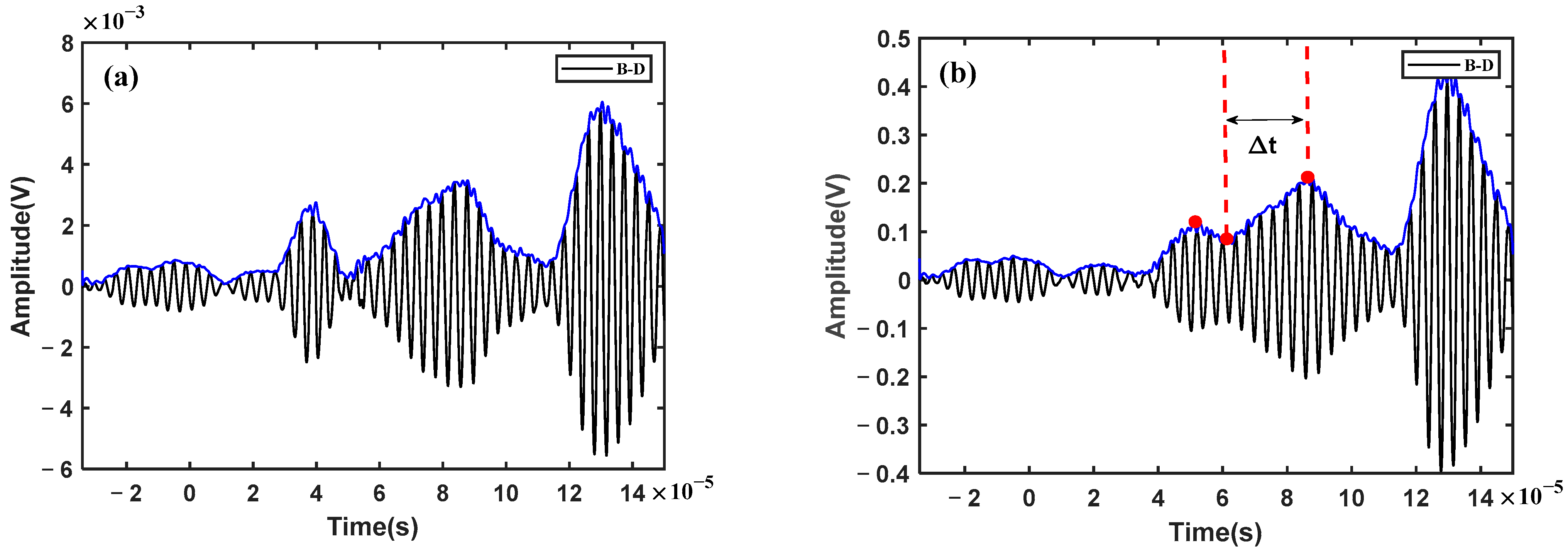
in the current state, respectively. At the same time, boundary reflection signals, and other noise, can also cancel each other out because of the symmetrical positioning of the two sensors in the structure. Therefore, the time difference
can be obtained according to the characteristics of the damage-scattered signals. Here, Hilbert transform [
12] is used to estimate the ToF by extracting the time corresponding to the maximum of the envelope of the signal component. This is described by:
where
is the Hilbert transform of the damage-scattered signal
.
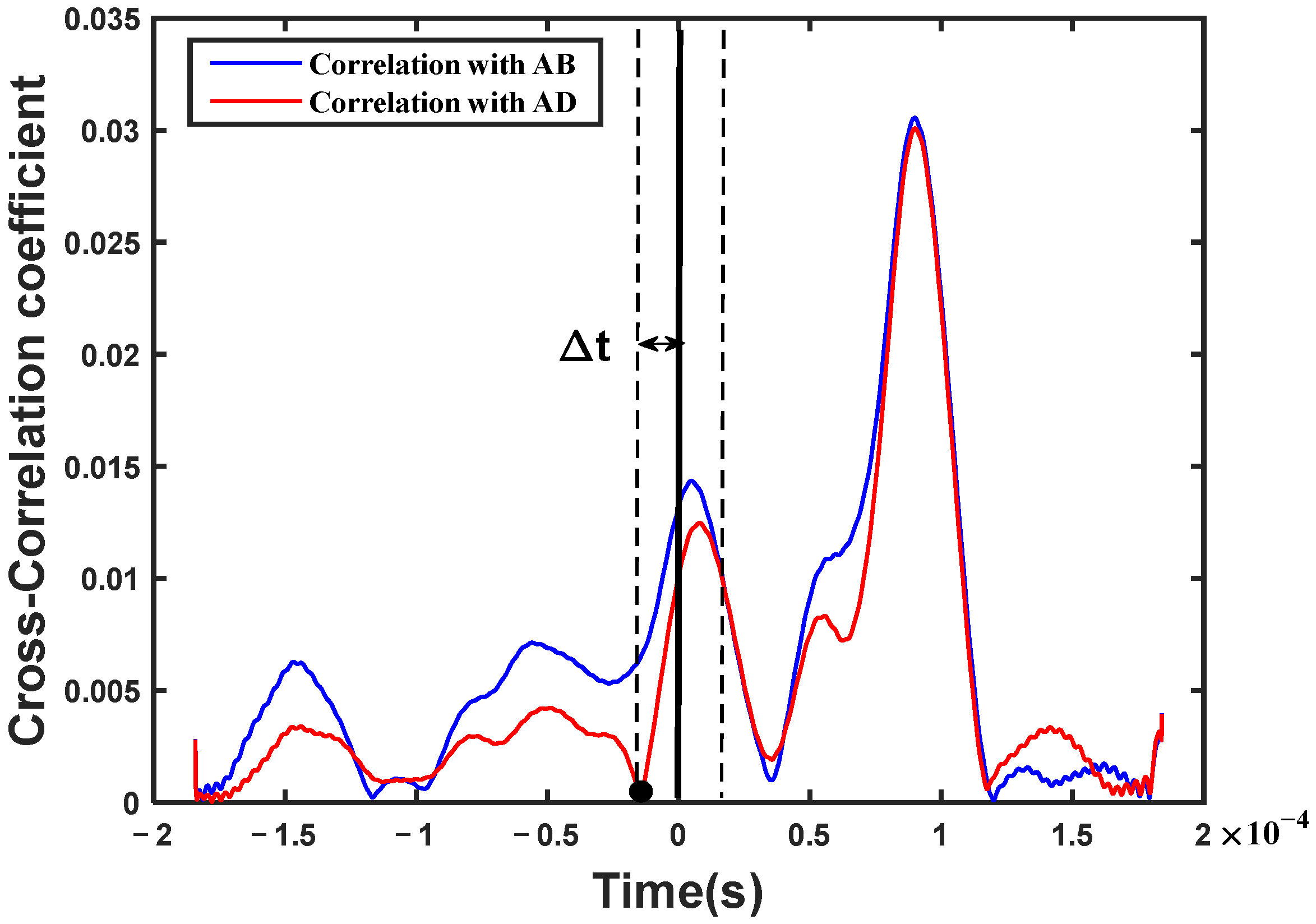
In addition, one should also pay further attention to the sign of the time difference
, because the hyperbolic loci usually have two branches by definition, which may bring pseudo-intersection points. To overcome such a problem, a cross-correlation method (CCM) is used to determine the sequence of time difference with a positive or negative sign. The time delays are calculated by means of the CCM between the damage-scattered signals and the two received signals, respectively, in which the cross-correlation function exhibits a notable characteristic value at
. This can be expressed by [
25]:
and
Since the damage-scattered signals are subtracted from the two received signals, the cross-correlation function will give a peak value at time 0, simultaneously. If the peak value appears at positive relative to 0, the scattered signal in another received signal will be behind that in the received signal. Otherwise, it is in advance. Once the sign of has been determined, whether it is positive or negative, it can specify only one branch of the hyperbola, so as to achieve damage localization precisely.
In this imaging method, a cumulative distribution function (CDF)
is introduced to determine a specific pixel at each node when the inspection area of the structure is virtually and evenly meshed, which is defined as [
26]:
where
is the Gaussian distribution function that relates the probability density of damage occurrence at the meshed node
. Further,
is the standard deviation of the relevant damage feature as a tolerance factor in the imaging process, and
is the upper limit of integral function, which means the shortest distance from the node to the hyperbolic loci. Thus, the probability value
on each node constructed by sensor
and
is then defined as:
For simplicity, a general overview of the proposed method in the symmetrical array is given in
Figure 2.
5. Results and Discussion
In the aforementioned diamond-shaped array, the time difference
is obtained from the two received signals in the current state. Then, using the proposed baseline-free method, the imaging results of damage locations in the experiments are shown in
Figure 11 and
Figure 12.
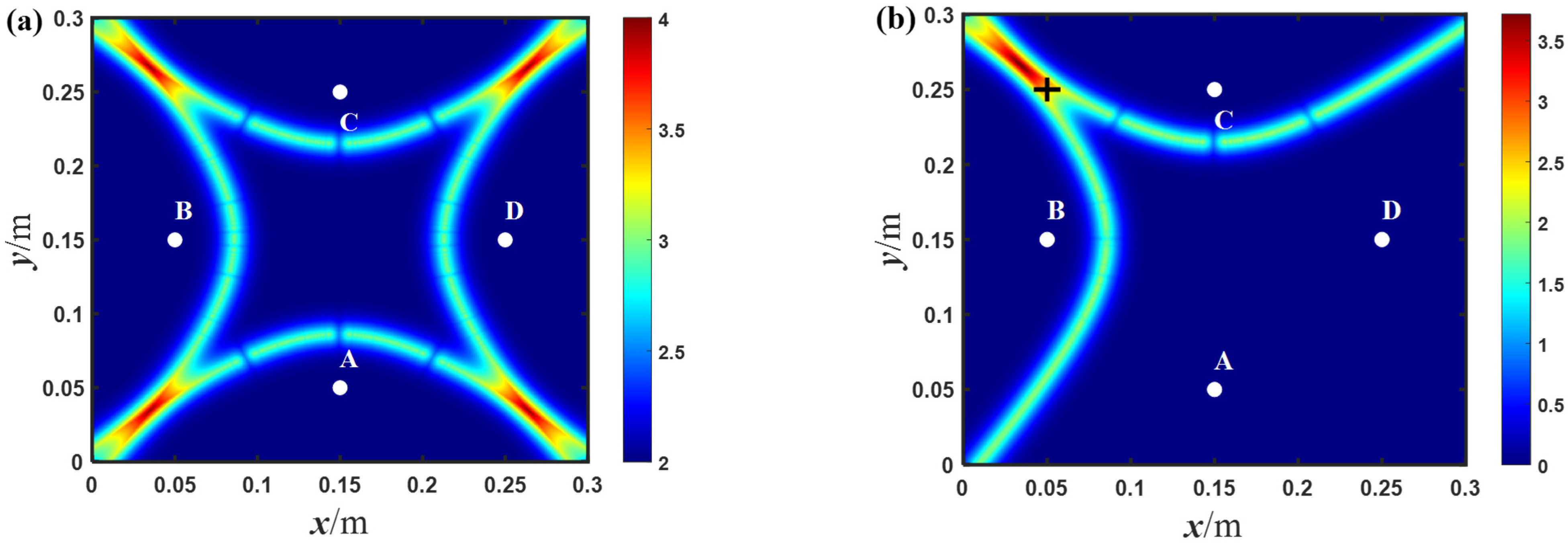
As shown in
Figure 11a, there are four intersections of the hyperbolic trajectories in the diamond-shaped array, resulting in artifacts in the imaging result, and it is not able to achieve damage localization accurately. Obviously, the hyperbola itself has two branches using the relative time difference of each pair of the two received signals. Therefore, it is still necessary to determine the sign of the relative time difference (namely, the time sequence), for precise damage localization. By using the cross-correlation function, only one branch of the hyperbola can be determined and the damage location can be achieved precisely, as shown in
Figure 11b. The maximum probability position of the imaging result considered to be the most likely location for the damage is at 35.6, 266, while the center position of the through-hole is at 50, 250. According to the error calculation method in [
30], the relative error of the imaging result is about 5.3%. It shows that the probability position of the imaging result is very close to the actual location of the through-hole, and the method gives the damage location fairly well.
The imaging result in
Figure 12 is similar to that in
Figure 11, while the most obvious difference is that in
Figure 12 the damage location is inside the diamond-shaped array and on the perpendicular bisector of certain line segment(s) of the pairs of two receiving sensors. Here, a correlation coefficient of two received signals is used to prejudge whether the damage location is on some of the perpendicular bisectors. If the correlation coefficient exceeds a certain threshold, it means that the damage is most likely on the perpendicular bisector, and vice versa. As shown in
Figure 12b, the maximum probability position of the imaging result is at 92.9, 149.8, which is almost at the actual center position of the through-hole at 100, 150, with a relative error of only about 2.36%. The above results show that no matter whether the damage location is inside or outside the diamond-shaped array, or even in the position symmetrical with respect to the pairs of two receiving sensors, the proposed method can be used to achieve baseline-free damage localization.
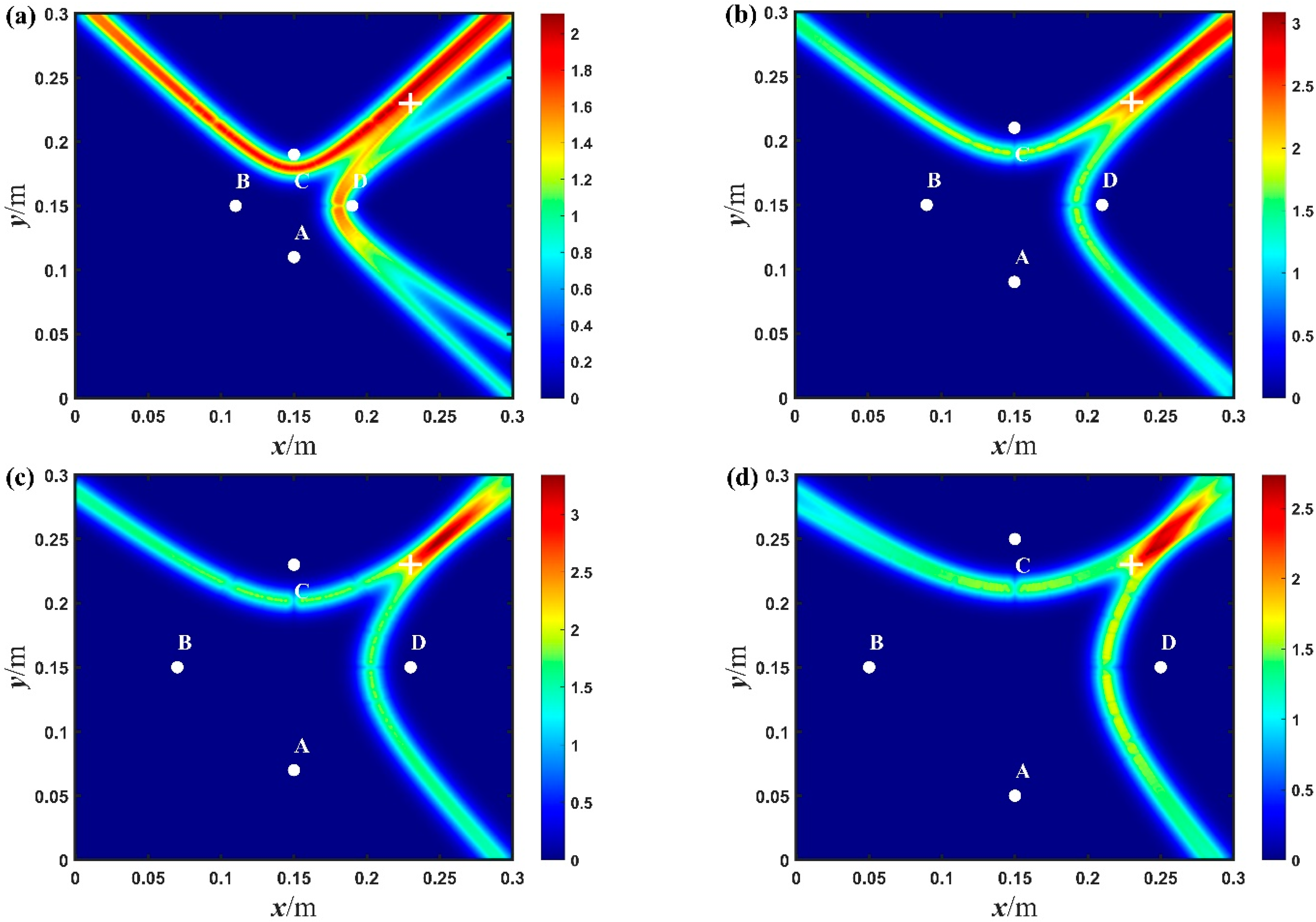
In order to further study the influence of the array forms on the imaging results, diamond-shaped arrays with different sizes were used for the baseline-free damage localization of the aluminum plate. As shown in
Figure 13, the imaging results in the experiments are obtained for different arrays. Meanwhile, the size of the arrays, the damage location and relative errors are shown in
Table 2. As shown in
Figure 13a, when the diagonal distance of the diamond-shaped array is about 80 mm, the maximum relative error is 7.7%. Compared with the array with maximum size, the array with minimum size has not only a higher relative error, but also two maximum probability locations in the simulated imaging results. It is worth mentioning that these imaging results come from some intersecting areas, not trajectory intersections; this is because this size of array has a small time difference, which makes the hyperbolic trajectory infinitely approach their asymptotes. Consequently, the maximum probability position becomes the intersection area of the asymptotes. Based on the above research, it is believed that when the diagonal distance of the diamond-shaped array is less than 80 mm, it will deteriorate the positioning accuracy and cause noticeable positioning errors, no matter where the damage location is. However, as the size of the array (namely, the diagonal distance) increases, the maximum probability position approaches the actual locations of damage and the accuracy of damage localization also increases correspondingly. As shown in
Figure 13d, when the diagonal distance of the diamond-shaped array is about 200 mm, the maximum probability location of the imaging result is at 241.4, 239.3, while the actual center position of the through-hole is at 230, 230. The relative error is about 3.8%, which means that the imaging result is close enough to the damage location. Therefore, the positioning accuracy can be significantly improved when the diagonal distance is larger than 80 mm, especially up to 200 mm. In summary, by using the diamond-shaped arrays with appropriate size, and the hyperbola algorithm, it is possible to effectively achieve damage localization with the proposed baseline-free method.
The simulations and experiments have similar imaging results because of the same excitation and reception process in the diamond-shaped arrays. The positioning errors of arrays with different sizes in the experimental testing and numerical simulations are shown in
Table 2. The results show that the accuracy of damage localization in the simulations is higher than that in the experiments. The reason may be that it is easy to excite a single S0 mode in the simulations, and the wave propagation is relatively simple, while the A0 mode can also be excited in the experiments, and the imaging results are probably affected by the multimode characteristics of Lamb waves. It can be seen that the damage localization is realized through simulations and experiments, which indicates that the proposed method is an effective baseline-free method for damage localization.
In further study, in order to verify the effectiveness of the proposed method, a comparative analysis was made of the baseline-free method presented in Ref. [
31]. The array form in the baseline-free method is shown in
Figure 14a. Although it is somewhat similar to the array form mentioned above, the difference is that two transducers are closely placed as a pair in the special transducer arrangement. Thus, the direct wave and damage-scattered wave can be separated effectively because of the large difference of their time of flight. The damage-scattered wave is easily extracted, and the imaging result of through-hole location in the experiment is shown in
Figure 14b. The maximum probability position of the imaging result is at 94.3, 146.3; it shows that the baseline-free method can also achieve damage positioning. Compared with the coordinate 92.9, 149.8 of the maximum value in
Figure 12b, it could be concluded that the positioning accuracy of the two methods is almost the same, even though it seems that the baseline-free method is more accurate than the proposed method, according to the positioning error here. Thus, these two kinds of baseline-free method can achieve damage localization by the special arrangement. It is worth noting that there are four groups of signals in these methods, while only four transducers are used in the proposed method. Further, the baseline-free method in Ref. [
31] has a high resolution and can detect multi defects due to the employed single mode nondispersive SH0 wave.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}