Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques



Abstract
1. Introduction
2. Materials and Methods
2.1. Tractors and Operator Selection
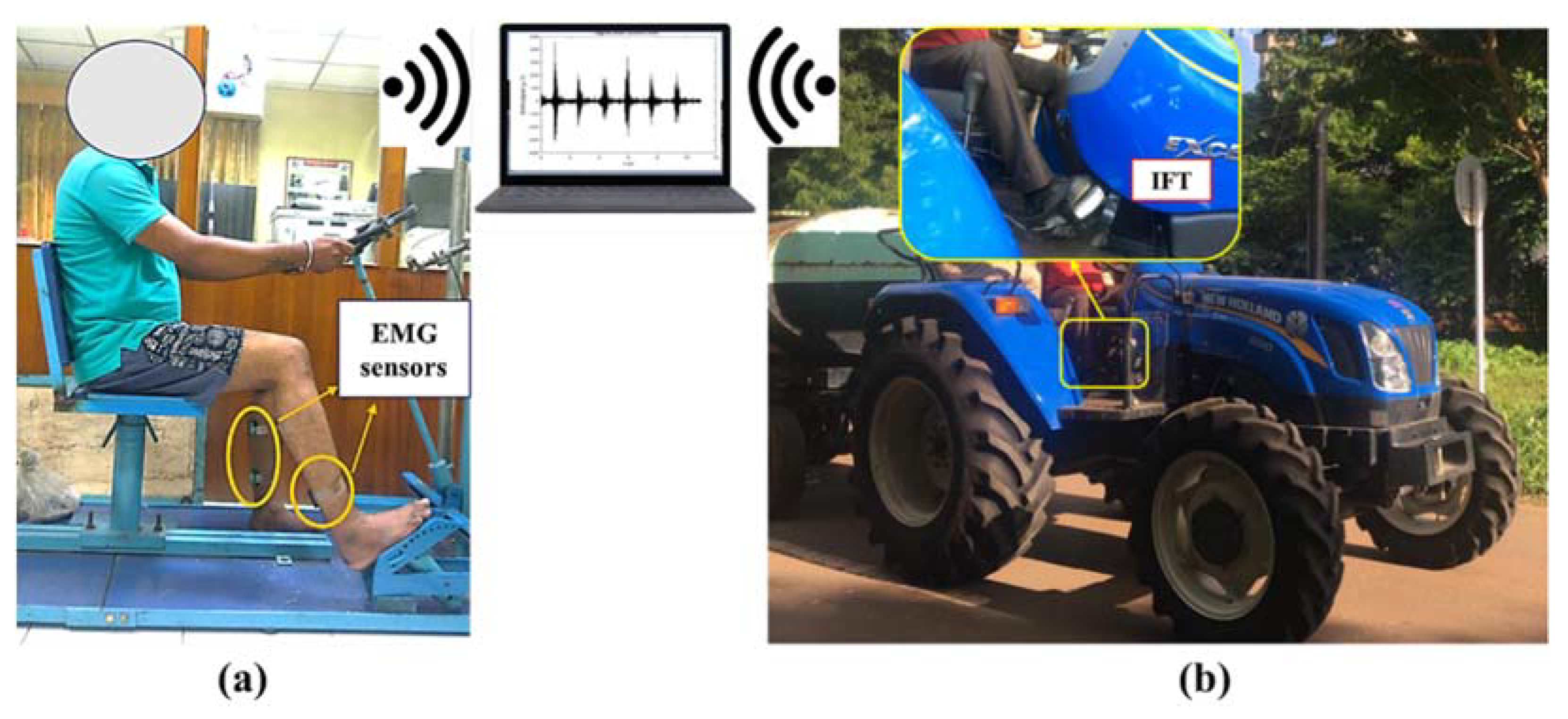
2.2. Data Collection
2.3. Data Analysis
2.4. Operator Workload Classification
3. Results
3.1. Actuation Forces
3.2. Heart Rate (HR)
3.3. Energy Expenditure Rate
3.4. Electromyography Features
3.4.1. Root Mean Square (RMS) and Muscle Workload (%MVC)
3.4.2. Mean and Median Frequency
3.5. Relationships between Actuation Forces, Energy Expenditure Rate, and Electromyography
3.6. Overall Discomfort Rating (ODR) and Its Classification
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Garcia, M.; Sanchez, A.; Domingo, R.; Sebastian, M.A. A cost-benefit ergonomics methodology applied to service industry with digital human modelling. Eur. J. Ind. Eng. 2014, 8, 533–553. [Google Scholar] [CrossRef]
- Naeini, H.S.; Karuppiah, K.; Tamrin, S.B.; Dalal, K. Ergonomics in agriculture: An approach in prevention of work-related musculoskeletal disorders (WMSDs). J. Agric. Environ. Sci. 2014, 3, 33–51. [Google Scholar]
- Nag, P.K.; Gite, L.P. Ergonomics Application in Design of Workplace of Tractors and Power Tillers. In Human-Centered Agriculture: Ergonomics and Human Factors Applied. Design Science and Innovation; Springer: Belin, Germany, 2020. [Google Scholar]
- Olmo, M.D.; Domingo, R. EMG characterization and processing in production engineering. Materials 2020, 13, 5815. [Google Scholar] [CrossRef]
- Yousif, H.A.; Zakaria, A.; Rahim, N.A.; Salleh, A.F.B.; Mahmood, M.; Alfarhan, K.A.; Kamarudin, L.M.; Mamduh, S.M.; Hasan, A.M.; Hussain, M.K. Assessment of Muscle Fatigue based on Surface EMG Signals using Machine Learning and Statistical Approaches: A review. In Proceedings of the 5th International Conference on Man Machine Systems, IOP Conference Series: Materials Science and Engineering, Pulau Pinang, Malaysia, 26–27 August 2019; Volume 705, p. 012010. [Google Scholar]
- Skrzat, J.M.; Carp, S.J.; Dai, T.; Lauer, R.; Hiremath, S.V.; Gaeckle, N.; Tucker, C.A. Use of surface electromyography to measure muscle fatigue in patients in an acute care hospital. Phys. Ther. 2020, 100, 897–906. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Pang, M.; Yu, P.; Tang, B.; Xiang, K.; Ju, Z. Effect of muscle fatigue on surface electromyography-based hand grasp force estimation. Appl. Bionics Biomech. 2021, 15, 8817480. [Google Scholar] [CrossRef]
- Day, S. Important Factors in Surface EMG Measurement—Customer Support Report; Bortec Biomedical Ltd.: Calgary, AB, USA, 2002. [Google Scholar]
- Garcia, M.A.C.; Vieira, T.M.M. Surface electromyography: Why, when and how to use it. Rev. Andal. Med. Deporte 2011, 4, 17–28. [Google Scholar]
- Shair, E.F.; Ahmad, S.A.; Marhaban, M.H.; Tamrin, S.B.M.; Abdullah, A.R. EMG processing-based measures of fatigue assessment during manual lifting. BioMed Res. Int. 2017, 2017, 3937254. [Google Scholar] [CrossRef]
- Romano, E.; Bisaglia, C.; Calcante, A.; Oberti, R.; Zani, A.; Vinnikov, D.; Marconi, A. Assessment of comfort variation among different types of driving agricultural tractors: Traditional, satellite-assisted and semi-automatic. Int. J. Environ. Res. Public Health 2020, 17, 8836. [Google Scholar] [CrossRef]
- Rasmussen, J.; Torholm, S.; de Zee, M. Computational analysis of the influence of seat pan inclination and friction on muscle activity and spinal joint forces. Int. J. Ind. Ergon. 2009, 39, 52–57. [Google Scholar] [CrossRef]
- Kuta, L.; Stopa, R.; Szyjewicz, D.; Komarnicki, P. Determination of comfortable position for tractor driver’s hands based on dynamic load. Int. J. Ind. Ergon. 2019, 74, 102866. [Google Scholar] [CrossRef]
- Gerdle, B.; Larsson, B.; Kalrson, S. Criterion validation of surface EMG variables as fatigue indicators using peak torque. J. Electromyogr. Kinesiol. 2000, 10, 225–232. [Google Scholar] [CrossRef] [PubMed]
- Doheny, E.P.; Lowery, M.M.; FitzPatrick, D.P.; O’Malley, M.J. Effect of elbow joint angle on force–EMG relationships in human elbow flexor and extensor muscles. J. Electromyogr. Kinesiol. 2008, 18, 760–770. [Google Scholar] [CrossRef] [PubMed]
- Kaplanis, P.A.; Pattichis, C.S.; Hadjileontiadis, L.J.; Roberts, V.C. Surface EMG analysis on normal subjects based on isometric voluntary contraction. J. Electromyogr. Kinesiol. 2009, 19, 157–171. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Li, W.; Yang, Y.; Miao, W. Evaluation and optimization of vehicle pedal comfort based on biomechanics. J. Automob. Eng. 2020, 234, 1402–1412. [Google Scholar] [CrossRef]
- Marina, M.; Torrado, P.; Bescos, R. Recovery and fatigue behavior of forearm muscles during a repetitive power grip gesture in racing motorcycle riders. Int. J. Environ. Res. Public Health 2021, 18, 7926. [Google Scholar] [CrossRef]
- De Oliveira, C.G.; Nadal, J. Back muscle EMG of helicopter pilots in flight: Effects of fatigue, vibration, and posture. Aviat. Space Eenviron. Med. 2004, 75, 317–322. [Google Scholar]
- Draicchio, F.; Chini, G.; Silvetti, A.; Vitalone, R.; Lucertini, E.; Lucertini, M. Neck and Shoulder Muscle Fatigue in High Performance Aircrafts Pilots: A Case Study. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Orlando, FL, USA, 21–25 July 2018; Springer: Cham, Switzerland, 2018; pp. 40–49. [Google Scholar]
- Nacpil, E.J.C.; Nakano, K. Surface electromyography-controlled automobile steering assistance. Sensors 2020, 20, 809. [Google Scholar] [CrossRef]
- Shukla, S. Physiological and subjective evaluation of tractor operator workplace. Eng. Technol. India 2016, 7, 26–32. [Google Scholar] [CrossRef]
- Benos, L.; Tsaopoulos, D.E.; Bochtis, D. A review on ergonomics in agriculture. Part II: Mechanized operations. Appl. Sci. 2020, 10, 3484. [Google Scholar] [CrossRef]
- Brookhuis, K.A.; de Waard, D. Monitoring drivers’ mental workload in driving simulators using physiological measures. Accid. Anal. Prev. 2010, 42, 898–903. [Google Scholar] [CrossRef]
- Yadav, R.; Budhrani, B.P.; Balani, P.C.; Pund, S. Anthropometric and ergonomic compatibility of tractor workplace design. J. Ergon. 2017, 6, 1–7. [Google Scholar] [CrossRef]
- Monarca, D.; Cecchini, M.; Santi, M.; Colantoni, A. Analysis of anthropometric compatibility of agricultural tractor cabs. Agric. Eng. Int. CIGR E-J. 2009, 11, 1–10. [Google Scholar]
- Dewangan, K.N.; Owary, C.; Datta, R.K. Anthropometry of male agricultural workers of north-eastern India and its use in design of agricultural tools and equipment. Int. J. Ind. Ergon. 2010, 40, 560–573. [Google Scholar] [CrossRef]
- Hota, S.; Tewari, V.K.; Chandel, A.K.; Singh, G. An integrated foot transducer and data logging system for dynamic assessment of lower limb exerted forces during agricultural machinery operations. Artif. Intell. Agric. 2020, 4, 96–103. [Google Scholar] [CrossRef]
- Busse, S.K.; Sinclair, A.N.; Wondimu, D.H.; Redda, D.T. Physiological responses of operators to handle vibration of diesel-fueled single-axle tractor. Afr. J. Agric. Res. 2019, 14, 1295–1303. [Google Scholar]
- Cremasco, M.M.; Giustetto, A.; Caffaro, F.; Colantoni, A.; Cavallo, E.; Grigolato, S. Risk assessment for musculoskeletal disorders in forestry: A comparison between RULA and REBA in the manual feeding of a woodchipper. Int. J. Environ. Res. Public Health 2019, 16, 1–13. [Google Scholar]
- Fethke, N.B.; Schall, M.C., Jr.; Chen, H.; Branch, C.A.; Merlino, L.A. Biomechanical factors during common agricultural activities: Results of on-farm exposure assessments using direct measurement methods. J. Occup. Hyg. 2020, 17, 85–96. [Google Scholar] [CrossRef]
- Fallahi, H.; Abbaspour-Fard, M.H.; Azhari, A.; Khojastehpour, M.; Nikkhah, A. Ergonomic assessment of drivers in MF285 and MF399 tractors during clutching using algometer. Inf. Process. Agric. 2016, 3, 54–60. [Google Scholar] [CrossRef]
- Mehta, C.R.; Pandey, M.M.; Tiwari, P.S.; Gite, L.P.; Khadatkar, A. Tractor controls actuating force limits for Indian operators. Ind. Health 2011, 49, 523–533. [Google Scholar] [CrossRef]
- Hota, S.; Tewari, V.K.; Singh, G.; Kumari, S. Technical Intervention for Assessment of Physiological Characteristics as Function of Operating Force in Traditional Agricultural Operations. Ergonomics for Improved Productivity. In Proceedings of the HWWE, Online, 1–3 December 2021. [Google Scholar]
- Corlett, E.N.; Bishop, R.P. A technique for assessing postural discomfort. Ergonomics 1976, 19, 175–182. [Google Scholar] [CrossRef] [PubMed]
- Davies, C.T.M.; Harris, E.A. Heart rate during transition from rest to exercise, in relation to exercise tolerance. J. Appl. Physiol. 1964, 19, 85–862. [Google Scholar] [CrossRef]
- Tiwari, K. Ergonomical Evaluation of Tractor Operator’s Workplace and Activity. Master’s Thesis, Jawaharlal Nehru Krishi Vishwa Vidyalaya University, Jabalpur, India, 2001. [Google Scholar]
- Too, J.; Abdullah, A.R.; Tengku Zawawi, T.N.S.; Mohd Saad, N.; Musa, H. Classification of EMG signal based on time domain and frequency domain features. Int. J. Hum. Technol. Interact. 2017, 1, 25–29. [Google Scholar]
- Cifrek, M.; Medved, V.; Tonkovic, S.; Ostojic, S. Surface EMG based muscle fatigue evaluation in biomechanics. Clin. Biomech. 2009, 24, 327–340. [Google Scholar] [CrossRef]
- Mathiassen, S.E. A Checklist for Normalisation of Surface EMG Amplitude 1997. In Proceedings of the Second General SENIAM Workshop, Stockholm, Sweden, 12–15 June 1997; Hermens, H., Hagg, G., Freriks, B., Eds.; IEEE: Hoboken, NJ, USA, 1997; Chapter 2. [Google Scholar]
- Caliskan, S.; Sogukpinar, I. KxKNN: K-Means and K En Yakın Komşu Yöntemleri ile Aglarda Nufuz Tespiti. In Proceedings of the 2nd International Conference on Security of Information and Networks, Gazimagusa, Cyprus, 6–10 October 2009. [Google Scholar]
- Le, T.M.; Vo, T.M.; Pham, T.N.; Dao, A.S.V.T. A novel wrapper-based feature selection for early diabetes prediction enhanced with a metaheuristic. IEEE Eng. Med. Biol. Soc. Sect. 2021, 9, 7869–7884. [Google Scholar] [CrossRef]
- Rahman, S.M.; Altwijri, O.; Ali, M.A.; Alqahtani, M. EMG-Based Classification of Forearm Muscles in prehension Movements: Performance Comparison of Machine Learning Algorithms. In Proceedings of the Second EAI International Conference, ICONCS, Dhaka, Bangladesh, 15–16 February 2020. [Google Scholar]
- Astrand, P.O.; Rodahl, K. Textbook of Work Physiology: Physiological Bases of Exercise, 3rd ed.; McGraw-Hill Book Company: New York, NY, USA, 1986. [Google Scholar]
- Nag, P.K.; Sebastian, N.C.; Mavlankar, M.G. Occupational workload of Indian agricultural workers. Ergonomics 1980, 23, 91–102. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Blekhman, L.I.; Vasilkov, V.B.; Ivanov, K.S. Wear and Tear of Nominally Fixed Joints affected by Vibration and Percussive Impacts. In Proceedings of the XL International Summer School Conference, St. Petersburg, Russia, 2–8 July 2012; pp. 43–55. [Google Scholar]
- Mortimer, R.G.; Segel, L.; Dugoff, H.; Campbell, J.D.; Jorgeson, C.M.; Murphy, R.W. Brake Force Requirement Study: Driver-Vehicle Braking Performance as a Function of Brake System Design Variables; Department of Transportation Final Report; National Highway Safety Bureau: Washington, DC, USA, 1970.
- Committee on Agricultural Safety and Health Research and Extension. Agricultural Equipment on Public Roads; USDA-CSREES: Washington, DC, USA, 2009.
- Kalakos, D.; Westerhof, B. Heavy Vehicle Braking Using Friction Estimation for Controller Optimization. Master’s Thesis, KTH Royal Institute of Technology, Chalmers University of Technology, Stockholm, Sweden, 2017. Available online: https://kth.diva-portal.org/smash/get/diva2:1183292/FULLTEXT01.pdf (accessed on 11 September 2021).
- Kurtus, R. Coefficient of Rolling Friction. Physics Lessons: School of Champions. 2016. Available online: https://www.school-for-champions.com/science/friction_rolling_coefficient.htm#.Y9KcNXZKibg (accessed on 11 September 2021).
- Hosseinlou, M.H.; Ahadi, H.; Hematian, V. A study of the minimum safe stopping distance between vehicles in terms of braking systems, weather and pavement conditions. Indian J. Sci. Technol. 2012, 5, 3421–3427. [Google Scholar] [CrossRef]
- Moritani, T.; Muro, M. Motor unit activity and surface electromyogram power spectrum during increasing force of contraction. Eur. J. Appl. Physiol. Occup. Physiol. 1987, 56, 260–265. [Google Scholar] [CrossRef] [PubMed]
- Singh, G.K. Effect of whole-body vibration on vehicle operators: A review. Int. J. Sci. Res. 2014, 3, 320–323. [Google Scholar]
- Farina, D.; Fosci, M.; Merletti, R. Motor unit recruitment strategies investigated by surface EMG variables. J. Appl. Physiol. 2002, 92, 235–247. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Thongpanja, S.; Phukpattaranont, P.; Limsakul, C. The Usefulness of Mean and Median Frequencies in Electromyography Analysis. In Computational Intelligence in Electromyography Analysis—A Perspective on Current Applications and Future Challenges; InTech: Vienna, Austria, 2012; pp. 196–220. [Google Scholar]
- Kumari, P.; Maski, D.; Veerangouda, M.; Shirwal, S. Evaluation of body discomfort score of agricultural workers during weeding operation. Int. J. Curr. Microbiol. Appl. Sci. 2018, 7, 365–373. [Google Scholar] [CrossRef]
- Wargula, L.; Wieczorek, B.; Kukla, M. The determination of the rolling resistance coefficient of objects equipped with the wheels and suspension system—Results of preliminary tests. MATEC Web Conf. 2019, 254, 01005. [Google Scholar] [CrossRef]
- Reaz, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. EMG Analysis using Wavelet Functions to Determine Muscle Contraction. In Proceedings of the 8th International Conference on e-Health Networking, Applications and Services (HEALTHCOM), Delhi, India, 17–19 August 2006. [Google Scholar]
- Seyidbayli, C.; Salhi, F.; Akdogan, E. Comparison of machine learning algorithms for EMG signal classification. Period. Eng. Nat. Sci. 2020, 8, 1165–1176. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (unit) | Tractors | ||
|---|---|---|---|
| T1 | T2 | T3 | |
| Make and Model | New Holland 6010 | John Deere 5055E | Escort 355 |
| Power (HP) | 60 | 55 | 47 |
| Rated rpm | 2200 | 2400 | 2100 |
| Forward speeds | 12 | 9 | 10 |
| Reverse speeds | 12 | 3 | 2 |
| Clutch type | Mechanical | Mechanical | Mechanical |
| Brake type | Hydraulic, oil-immersed multi-disc | Self-adjusting, self-equalizing, oil-immersed disc | Mechanical |
| Operational age | >3 years | >10 years | >15 years |
| Mass (kg) | 2415 | 2110 | 1760 |
| Tire condition | Good, negligible wear and tear | Slightly worn out | Slightly worn out |
| Front tire size Rear tire size | 7.5 × 16 16.9 × 28 | 6.5 × 20 16.9 × 28 | 6.0 × 16 14.9 × 28 |
| Instruments | Specifications | Measurement |
|---|---|---|
| Data LITE Surface EMG sensor (Biometrics Ltd., UK) | Integral dry reusable, Bandwidth: 10–250, 470, 950; Full scale: +/− 6 mV Peak to Peak; Gain: +/− 60 mV to +/− 6000 mV; Accuracy: +/− 1.0% | EMG signal response of muscles |
| Instrumented foot transducer (IFT) | Accuracy: +/− 0.1% | Actuation force of clutch and brake pedals |
| Heart rate monitor (Polar, Finland), | Operating temp: −10 °C to +50 °C Accuracy: +/− 0.01% | Heart rate of the operators |
| K4b2 portable metabolic analyzer | Accuracy: +/− 0.02% | Oxygen uptake of the operators |
| Tarmacadam Surface | Farm Road | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Muscle/Leg | Response | T1 | T2 | T3 | T1 | T2 | T3 | ||||||||||||
| S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | ||
| RL | AF | 120 | 163 | 207 | 245 | 271 | 296 | 283 | 299 | 329 | 106 | 136 | 173 | 224 | 261 | 281 | 262 | 292 | 305 |
| LL | AF | 109 | 123 | 169 | 220 | 254 | 267 | 246 | 281 | 310 | 92 | 109 | 164 | 198 | 217 | 246 | 236 | 265 | 295 |
| Full body | HR | 90 | 95 | 99 | 100 | 105 | 110 | 106 | 114 | 118 | 85 | 90 | 95 | 97 | 103 | 108 | 101 | 109 | 113 |
| Full body | EER | 11 | 12 | 14 | 14 | 16 | 18 | 16 | 19 | 20 | 9 | 11 | 12 | 13 | 15 | 17 | 15 | 17 | 19 |
| Full body | ODR | 3.9 | 4.5 | 4.9 | 5.0 | 5.5 | 6.0 | 5.5 | 6.2 | 6.6 | 3.5 | 4.0 | 4.5 | 4.7 | 5.3 | 5.8 | 5.1 | 5.9 | 6.3 |
| GR | RMS | 8 | 13 | 17 | 11 | 13 | 23 | 15 | 19 | 28 | 8 | 12 | 15 | 11 | 12 | 19 | 13 | 18 | 25 |
| MNF | 79 | 103 | 111 | 110 | 119 | 119 | 120 | 126 | 124 | 75 | 98 | 107 | 105 | 110 | 117 | 117 | 121 | 122 | |
| MDF | 50 | 79 | 78 | 71 | 89 | 87 | 106 | 111 | 108 | 49 | 73 | 80 | 112 | 114 | 121 | 75 | 111 | 108 | |
| %MVC | 10 | 18 | 22 | 13 | 17 | 26 | 24 | 28 | 34 | 11 | 15 | 13 | 16 | 17 | 25 | 22 | 24 | 32 | |
| GL | RMS | 10 | 12 | 18 | 12 | 14 | 19 | 14 | 17 | 21 | 9 | 12 | 15 | 8 | 9 | 14 | 12 | 14 | 20 |
| MNF | 92 | 102 | 107 | 111 | 110 | 126 | 110 | 128 | 132 | 89 | 99 | 104 | 108 | 109 | 119 | 107 | 123 | 125 | |
| MDF | 90 | 93 | 86 | 93 | 92 | 101 | 94 | 106 | 122 | 71 | 79 | 82 | 74 | 79 | 99 | 90 | 101 | 120 | |
| %MVC | 16 | 21 | 33 | 17 | 20 | 26 | 20 | 24 | 33 | 18 | 22 | 28 | 18 | 19 | 24 | 18 | 23 | 30 | |
| SR | RMS | 12 | 13 | 19 | 12 | 16 | 19 | 14 | 16 | 25 | 11 | 12 | 19 | 11 | 13 | 19 | 11 | 13 | 25 |
| MNF | 85 | 90 | 99 | 89 | 85 | 107 | 91 | 89 | 102 | 83 | 86 | 9 | 81 | 84 | 101 | 85 | 87 | 98 | |
| MDF | 48 | 52 | 70 | 45 | 48 | 59 | 74 | 83 | 91 | 34 | 39 | 59 | 44 | 44 | 50 | 73 | 79 | 100 | |
| %MVC | 15 | 17 | 28 | 16 | 18 | 26 | 19 | 21 | 32 | 16 | 17 | 21 | 17 | 18 | 23 | 17 | 19 | 28 | |
| SL | RMS | 8 | 13 | 15 | 9 | 11 | 16 | 12 | 14 | 18 | 7 | 8 | 11 | 8 | 9 | 13 | 10 | 11 | 15 |
| MNF | 79 | 85 | 95 | 74 | 79 | 90 | 77 | 81 | 90 | 76 | 82 | 91 | 74 | 77 | 87 | 75 | 79 | 88 | |
| MDF | 37 | 45 | 59 | 45 | 47 | 53 | 71 | 77 | 85 | 37 | 43 | 55 | 41 | 46 | 49 | 68 | 74 | 80 | |
| %MVC | 8 | 10 | 17 | 9 | 11 | 17 | 13 | 15 | 19 | 8 | 10 | 14 | 9 | 11 | 16 | 11 | 13 | 17 | |
| Accuracy (%) | ||||
|---|---|---|---|---|
| Classifier | GR | GL | SR | SL |
| KNN | 91 | 87 | 90 | 91 |
| RFC | 97 | 97 | 97 | 97 |
| SVM | 96 | 92 | 93 | 96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hota, S.; Tewari, V.K.; Chandel, A.K. Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques. Sensors 2023, 23, 1408. https://doi.org/10.3390/s23031408
Hota S, Tewari VK, Chandel AK. Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques. Sensors. 2023; 23(3):1408. https://doi.org/10.3390/s23031408
Chicago/Turabian StyleHota, Smrutilipi, V. K. Tewari, and Abhilash K. Chandel. 2023. "Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques" Sensors 23, no. 3: 1408. https://doi.org/10.3390/s23031408
APA StyleHota, S., Tewari, V. K., & Chandel, A. K. (2023). Workload Assessment of Tractor Operations with Ergonomic Transducers and Machine Learning Techniques. Sensors, 23(3), 1408. https://doi.org/10.3390/s23031408