
Odor Source Localization in Obstacle Regions Using Switching Planning Algorithms with a Switching Framework


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Statement
2.1. Time-Variant Airflow in the Obstacle Region
2.2. Deadlocks in the Probabilistic OSL Algorithm
2.3. Problem Statement
- Performing OSL without a plume dispersion model in the obstacle region;
- Not relying on only one odor source algorithm;
- Increasing the success rate and reducing the search time in obstacle regions.
3. Materials and Methods
3.1. Environment Decomposition
3.2. Switching between Planning Algorithms
| Algorithm 1 Algorithms switching framework |
Data: agent, source ▹ Location of agent and odor source gridMap, obstacle ▹ Given environmental components
|
4. Results
4.1. Verification of the OSL with Environment Decomposition
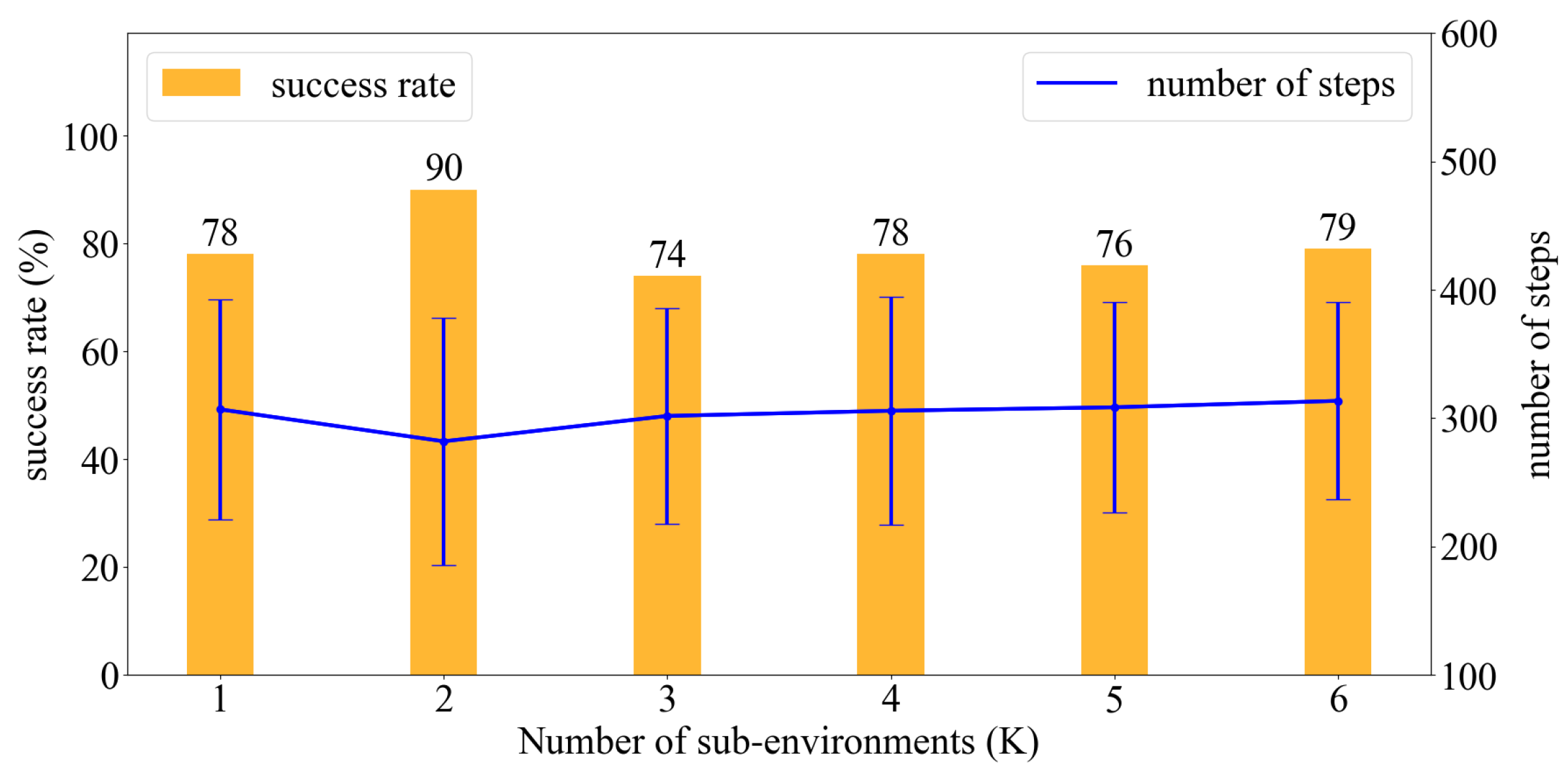
4.2. Jumping Frequency
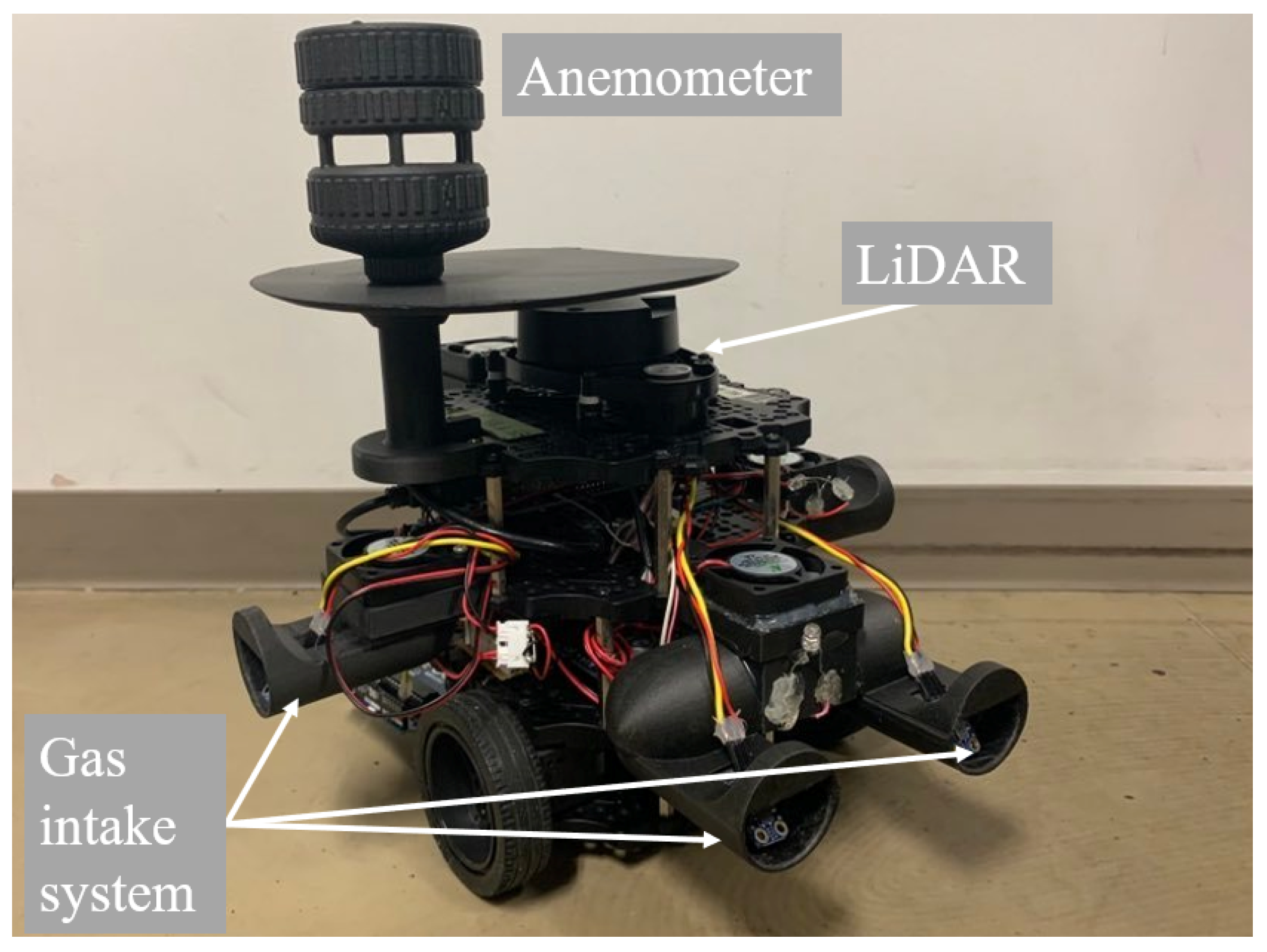
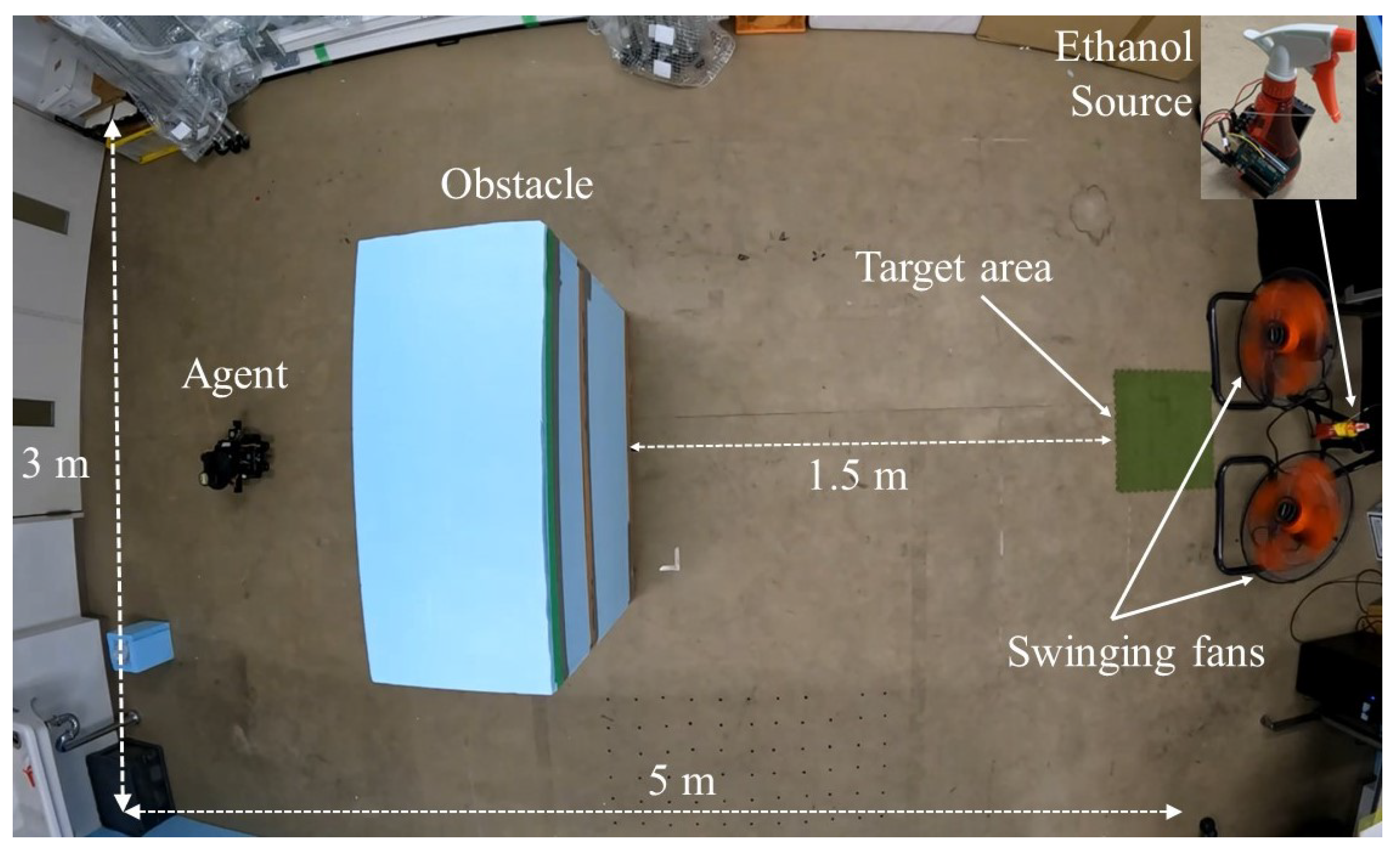
4.3. Result of Algorithm Switching in the Real World with a Robot
- Find the source with Infotaxis algorithm without switching;
- Find the source with algorithm switching.
5. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| OSL | Odor Source Localization |
| CFD | Computational Fluid Dynamics |
| LiDAR | Light Detection and Ranging |
References
- Cowen, E.A.; Ward, K.B. Chemical Plume Tracing. Environ. Fluid Mech. 2002, 2, 1–7. [Google Scholar] [CrossRef]
- Jing, T.; Hao, M.; Ishida, H. Recent Progress and Trend of Robot Odor Source Localization. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 938–953. [Google Scholar] [CrossRef]
- Ishida, H.; Wada, Y.; Matsukura, H. Chemical Sensing in Robotic Applications: A Review. IEEE Sens. J. 2012, 12, 3163–3173. [Google Scholar] [CrossRef]
- Kowadlo, G.; Russell, R.A. Robot Odor Localization: A Taxonomy and Survey. Int. J. Robot. Res. 2008, 27, 869–894. [Google Scholar] [CrossRef]
- Shraiman, B.I.; Siggia, E.D. Scalar turbulence. Nature 2000, 405, 639–646. [Google Scholar] [CrossRef]
- Celani, A.; Villermaux, E.; Vergassola, M. Odor Landscapes in Turbulent Environments. Phys. Rev. X 2014, 4, 041015. [Google Scholar] [CrossRef]
- Russell, R.; Bab-Hadiashar, A.; Shepherd, R.L.; Wallace, G.G. A comparison of reactive robot chemotaxis algorithms. Robot. Auton. Syst. 2003, 45, 83–97. [Google Scholar] [CrossRef]
- Grasso, F.W.; Consi, T.R.; Mountain, D.C.; Atema, J. Biomimetic robot lobster performs chemo-orientation in turbulence using a pair of spatially separated sensors: Progress and challenges. Robot. Auton. Syst. 2000, 30, 115–131. [Google Scholar] [CrossRef]
- Kanzaki, R.; Sugi, N.; Shibuya, T. Self-generated Zigzag Turning of Bombyx mori Males during Pheromone-mediated Upwind Walking(Physology). Zool. Sci. 1992, 9, 515–527. [Google Scholar]
- Shigaki, S.; Sakurai, T.; Ando, N.; Kurabayashi, D.; Kanzaki, R. Time-Varying Moth-Inspired Algorithm for Chemical Plume Tracing in Turbulent Environment. IEEE Robot. Autom. Lett. 2018, 3, 76–83. [Google Scholar] [CrossRef]
- Shigaki, S.; Fikri, M.R.; Reyes, C.H.; Sakurai, T.; Ando, N.; Kurabayashi, D.; Kanzaki, R.; Sezutsu, H. Animal-in-the-loop system to investigate adaptive behavior. Adv. Robot. 2018, 32, 945–953. [Google Scholar] [CrossRef]
- Li, W.; Farrell, J.A.; Card, R.T. Tracking of Fluid-Advected Odor Plumes: Strategies Inspired by Insect Orientation to Pheromone. Adapt. Behav. 2001, 9, 143–170. [Google Scholar] [CrossRef]
- Vergassola, M.; Villermaux, E.; Shraiman, B.I. ‘Infotaxis’ as a strategy for searching without gradients. Nature 2007, 445, 406–409. [Google Scholar] [CrossRef]
- Macedo, J.; Marques, L.; Costa, E. Evolving Infotaxis for Meandering Environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8431–8436. [Google Scholar]
- Hernandez-Reyes, C.; Shigaki, S.; Yamada, M.; Kondo, T.; Kurabayashi, D. Learning a Generic Olfactory Search Strategy from Silk Moths by Deep Inverse Reinforcement Learning. IEEE Trans. Med. Robot. Bionics 2021, 4, 241–253. [Google Scholar] [CrossRef]
- Lewis, T.; Bhaganagar, K. Configurable simulation strategies for testing pollutant plume source localization algorithms using autonomous multisensor mobile robots. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221081325. [Google Scholar] [CrossRef]
- Hu, H.; Song, S.; Chen, C.L.P. Plume Tracing via Model-Free Reinforcement Learning Method. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2515–2527. [Google Scholar] [CrossRef]
- Lilienthal, A.J.; Reggente, M.; Trincavelli, M.; Blanco, J.L.; Gonzalez, J. A statistical approach to gas distribution modelling with mobile robots—The Kernel DM+V algorithm. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 570–576. [Google Scholar]
- Chen, X.X.; Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robot. Auton. Syst. 2019, 112, 123–136. [Google Scholar] [CrossRef]
- Coltman, E.; Lipp, M.; Vescovini, A.; Helmig, R. Obstacles, Interfacial Forms, and Turbulence: A Numerical Analysis of Soil–Water Evaporation across Different Interfaces. Transp. Porous Media 2020, 134, 275–301. [Google Scholar] [CrossRef]
- Moshayedi, A.J.; Gharpure, D. Review on: Odor Localization Robot Aspect and Obstacles. Int. J. Mech. Eng. Robot. 2014, 2, 7–19. [Google Scholar]
- Jatmiko, W.; Sekiyama, K.; Fukuda, T. A pso-based mobile robot for odor source localization in dynamic advection-diffusion with obstacles environment: Theory, simulation and measurement. IEEE Comput. Intell. Mag. 2007, 2, 37–51. [Google Scholar] [CrossRef]
- Li, Z.; Tian, Z.; Lu, T.F.; Wang, H. Assessment of different plume-tracing algorithms for indoor plumes. Build. Environ. 2020, 173, 106746. [Google Scholar] [CrossRef]
- Kamarudin, K.; md shakaff, A.Y.; Bennetts, V.; Syed Zakaria, S.M.M.; Zakaria, A.; Visvanathan, R.; Ali Yeon, A.S.; Kamarudin, L. Integrating SLAM and gas distribution mapping (SLAM-GDM) for real-time gas source localization. Adv. Robot. 2018, 32, 637–647. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Simulation Software: Engineering in the Cloud. Available online: https://www.simscale.com/ (accessed on 1 December 2022).
- Li, J.G.; Meng, Q.H.; Wang, Y.; Zeng, M. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Auton. Robot. 2011, 30, 281–292. [Google Scholar] [CrossRef]
- Ojeda, P.; Monroy, J.; Gonzalez-Jimenez, J. Information-Driven Gas Source Localization Exploiting Gas and Wind Local Measurements for Autonomous Mobile Robots. IEEE Robot. Autom. Lett. 2021, 6, 1320–1326. [Google Scholar] [CrossRef]
- Monroy, J.; Hernandez-Bennetts, V.; Fan, H.; Lilienthal, A.; Gonzalez-Jimenez, J. GADEN: A 3D Gas Dispersion Simulator for Mobile Robot Olfaction in Realistic Environments. Sensors 2017, 17, 1479. [Google Scholar] [CrossRef] [PubMed]
- Doppenberg, S.P. Drag Influence of Tails in a Platoon of Bluff Bodies; Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar]
- FT205—Lightweight Wind Sensor for Drones. Available online: https://fttechnologies.com/wind-sensors/lightweight/ft205/ (accessed on 2 December 2022).
- Adafruit Mics5524 CO/Alcohol/VOC Gas Sensor Breakout. Available online: https://learn.adafruit.com/adafruit-mics5524-gas-sensor-breakout/ (accessed on 1 December 2022).
- Okajima, K.; Shigaki, S.; Suko, T.; Luong, D.N.; Reyes, C.; Hattori, Y.; Sanada, K.; Kurabayashi, D. A novel framework based on a data-driven approach for modelling the behaviour of organisms in chemical plume tracing. J. R. Soc. Interface 2021, 18, 20210171. [Google Scholar] [CrossRef]
- Hutchinson, M.; Liu, C.; Chen, W.H. Information-Based Search for an Atmospheric Release Using a Mobile Robot: Algorithm and Experiments. IEEE Trans. Control Syst. Technol. 2019, 27, 2388–2402. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Kanzaki, R. Behavioral and neural basis of instinctive behavior in insects: Odor-Source searching strategies without memory and learning. Robot. Auton. Syst. 1996, 18, 33–43. [Google Scholar] [CrossRef]
- Amsters, R.; Slaets, P. Turtlebot 3 as a Robotics Education Platform. In RiE 2019: Robotics in Education; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Shigaki, S.; Fikri, M.R.; Kurabayashi, D. Design and Experimental Evaluation of an Odor Sensing Method for a Pocket-Sized Quadcopter. Sensors 2018, 18, 3720. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luong, D.-N.; Kurabayashi, D. Odor Source Localization in Obstacle Regions Using Switching Planning Algorithms with a Switching Framework. Sensors 2023, 23, 1140. https://doi.org/10.3390/s23031140
Luong D-N, Kurabayashi D. Odor Source Localization in Obstacle Regions Using Switching Planning Algorithms with a Switching Framework. Sensors. 2023; 23(3):1140. https://doi.org/10.3390/s23031140
Chicago/Turabian StyleLuong, Duc-Nhat, and Daisuke Kurabayashi. 2023. "Odor Source Localization in Obstacle Regions Using Switching Planning Algorithms with a Switching Framework" Sensors 23, no. 3: 1140. https://doi.org/10.3390/s23031140
APA StyleLuong, D.-N., & Kurabayashi, D. (2023). Odor Source Localization in Obstacle Regions Using Switching Planning Algorithms with a Switching Framework. Sensors, 23(3), 1140. https://doi.org/10.3390/s23031140