
Lower Limb Joint Torque Prediction Using Long Short-Term Memory Network and Gaussian Process Regression †

 ,
,
Abstract
:1. Introduction
- The EMG signals, kinematics, and dynamics data are collected and processed during the normal walking of four subjects.
- An LSTM model and GPR model are built to predict torque using EMG signals and joint angles without GRF.
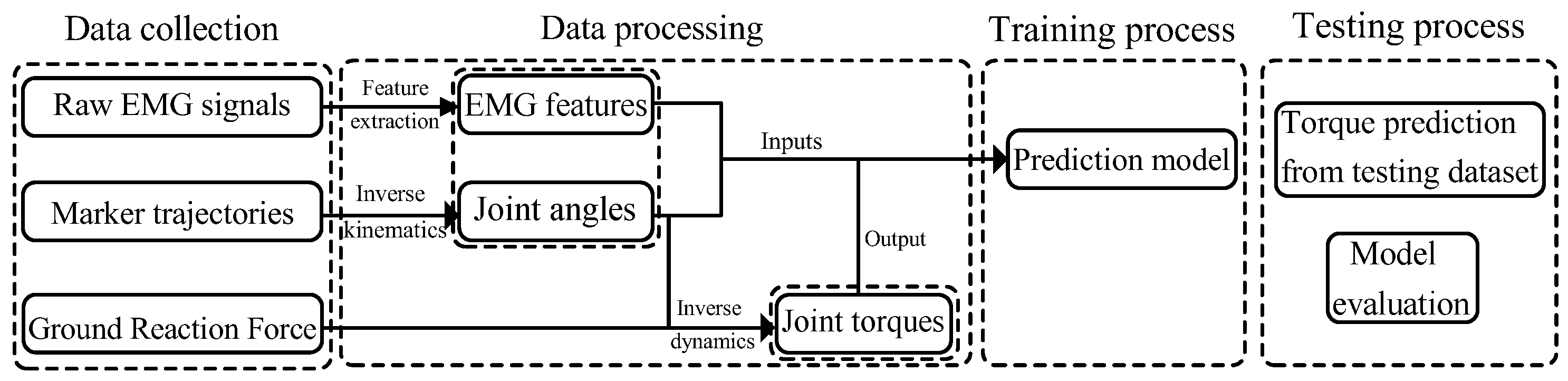
2. Materials and Methods
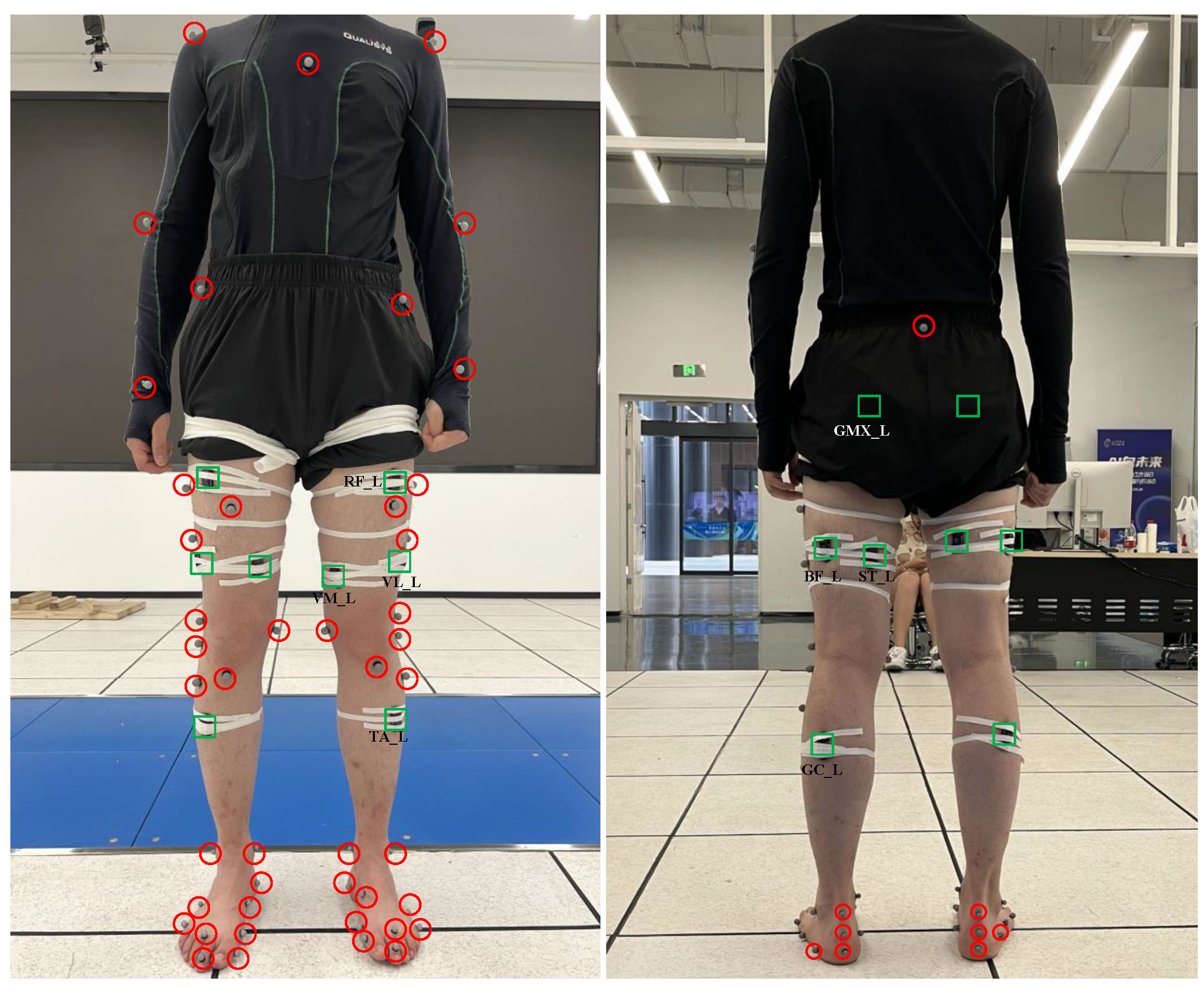
2.1. Data Collection
2.1.1. EMG Data Collection
2.1.2. Force and Motion Data Collection
2.2. Data Processing
2.2.1. sEMG Feature Extraction
- MAV:where X represents the EMG signal in a movable window and N represents the window length.
- RMS:
- ZC:where
- SSC:
- WL:
- MNF:where is the jth frequency component, is the power spectrum at , and M is the total number of frequency components.
- MDF:
2.2.2. Inverse Kinematics
2.2.3. Inverse Dynamics
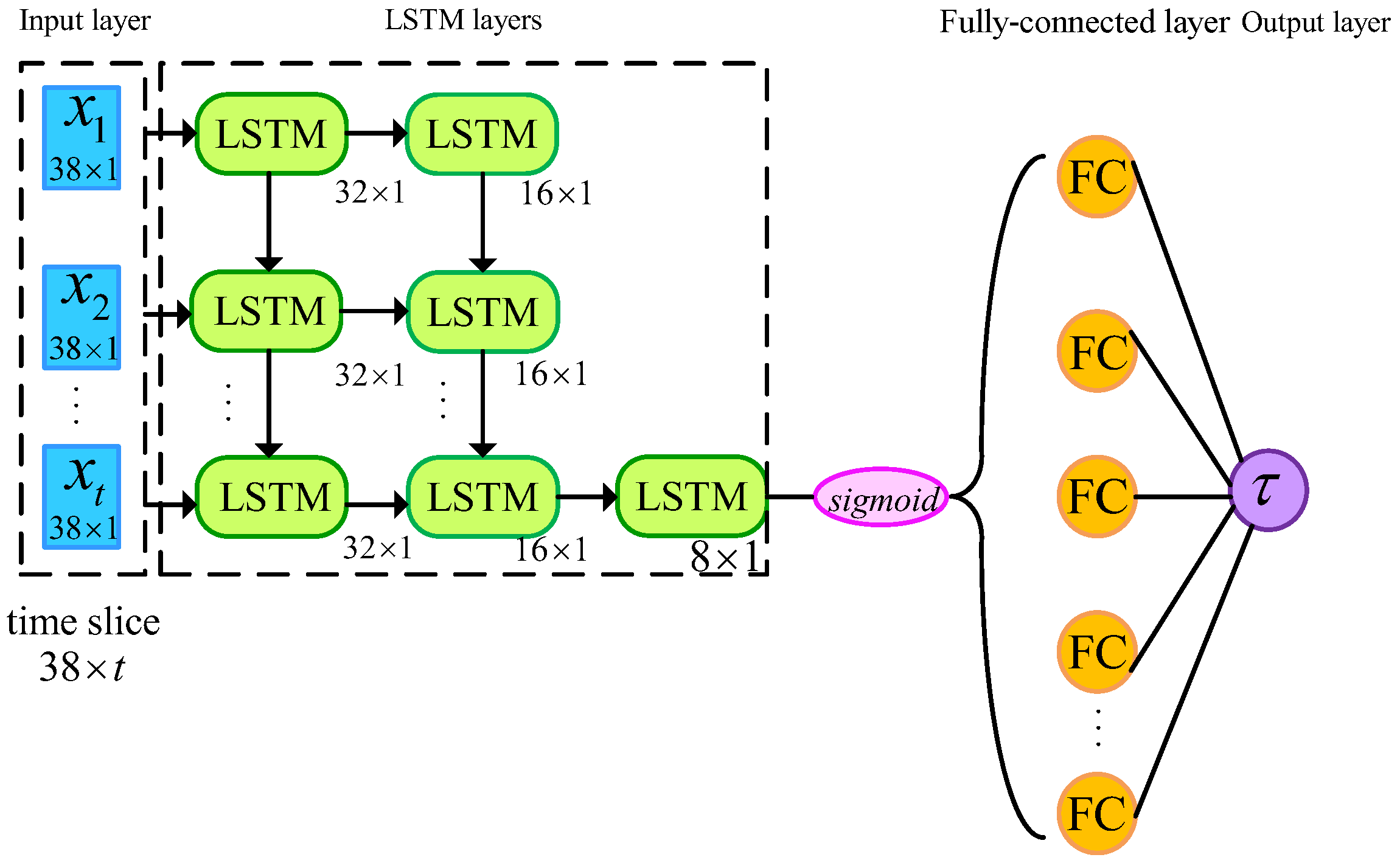
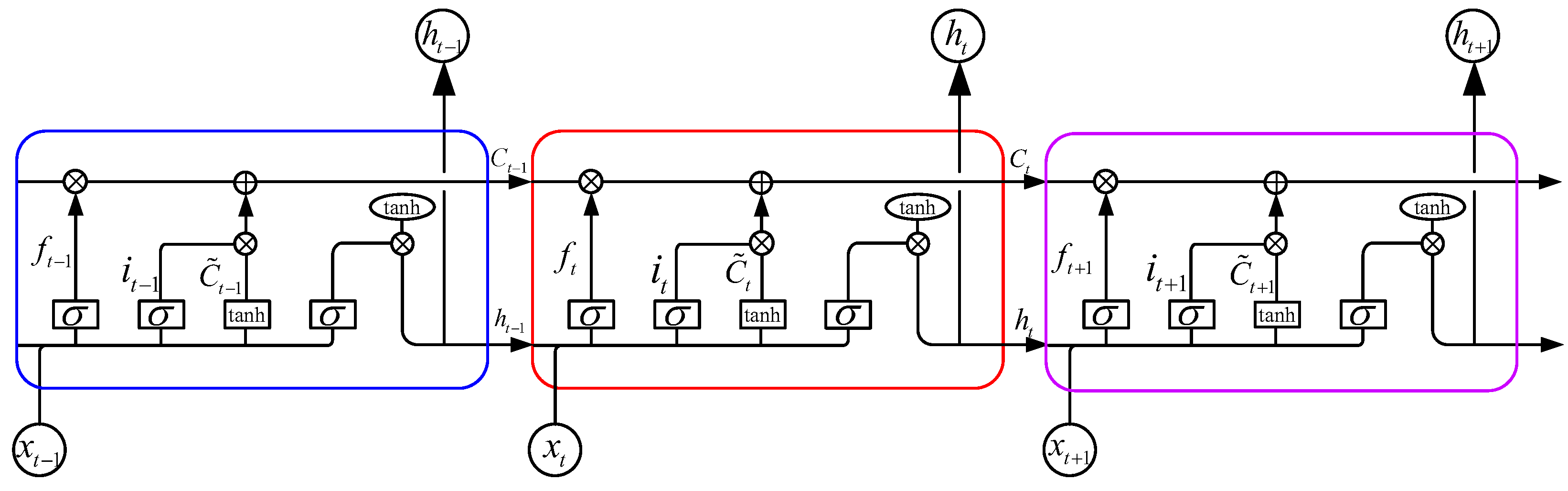
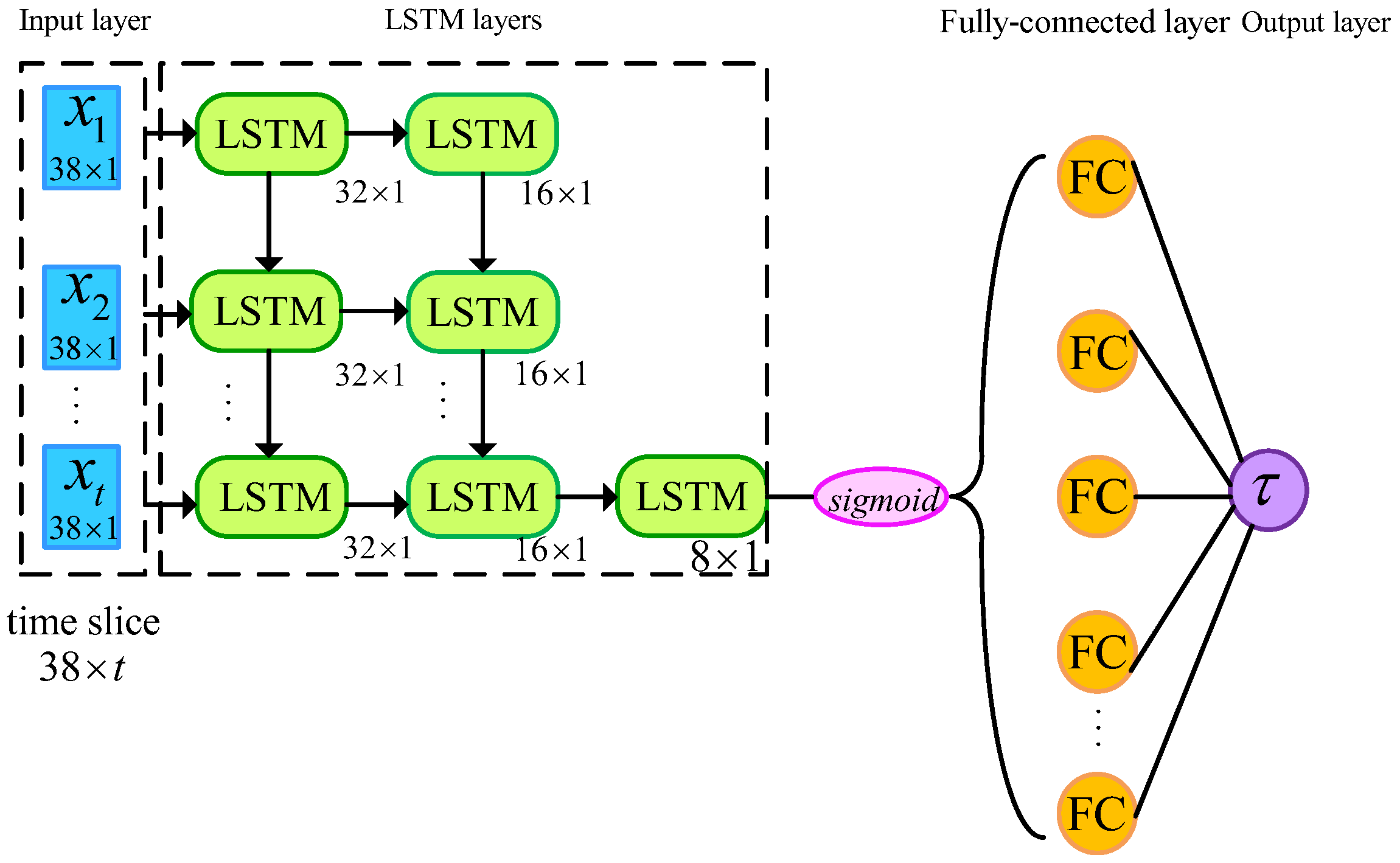
2.3. LSTM Neural Network Model
2.4. GPR Model
2.5. Evaluation Protocol
3. Results
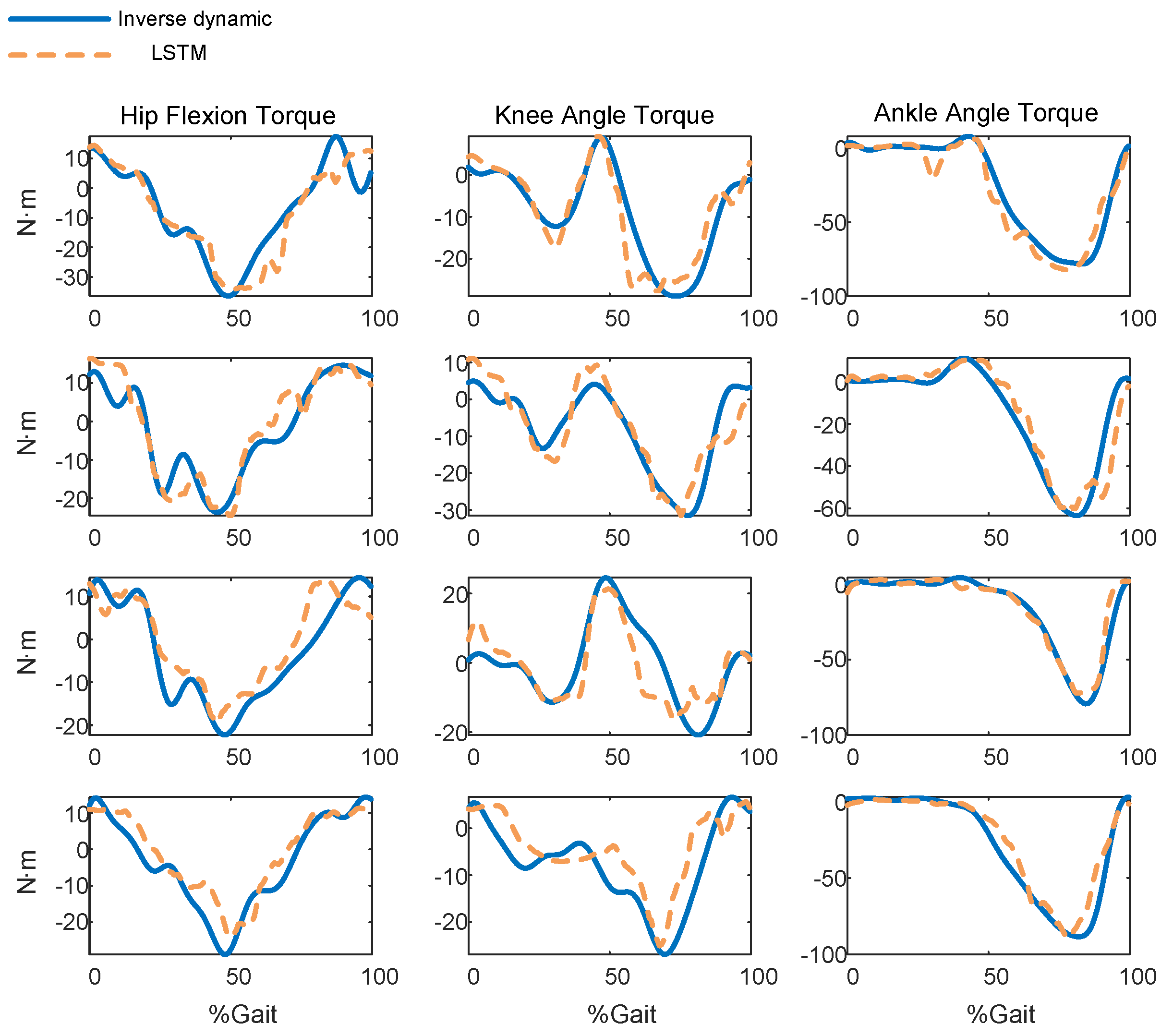
3.1. The Result of the LSTM Model
3.2. The Result of the GPR Model
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burnfield, J.M.; Josephson, K.R.; Powers, C.M.; Rubenstein, L.Z. The influence of lower extremity joint torque on gait characteristics in elderly men. Arch. Phys. Med. Rehabil. 2000, 81, 1153–1157. [Google Scholar] [CrossRef]
- Kerrigan, D.C.; Lelas, J.L.; Goggins, J.; Merriman, G.J.; Kaplan, R.J.; Felson, D.T. Effectiveness of a lateral-wedge insole on knee varus torque in patients with knee osteoarthritis. Arch. Phys. Med. Rehabil. 2002, 83, 889–893. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Chen, Z.; Yan, Y.; Xiong, W.; Jiang, D.; Shi, Y. Model identification and human-robot coupling control of lower limb exoskeleton with biogeography-based learning particle swarm optimization. Int. J. Control Autom. Syst. 2022, 20, 589–600. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y.; Jiang, D. Gait prediction and variable admittance control for lower limb exoskeleton with measurement delay and extended-state-observer. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 8693–8706. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y. Output Constrained Control of Lower Limb Exoskeleton Based on Knee Motion Probabilistic Model With Finite-Time Extended State Observer. IEEE/ASME Trans. Mechatron. 2023, 28, 2305–2316. [Google Scholar] [CrossRef]
- Gui, K.; Liu, H.; Zhang, D. A practical and adaptive method to achieve EMG-based torque estimation for a robotic exoskeleton. IEEE/ASME Trans. Mechatron. 2019, 24, 483–494. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Zajac, F.E.; Neptune, R.R.; Kautz, S.A. Biomechanics and muscle coordination of human walking: Part I: Introduction to concepts, power transfer, dynamics and simulations. Gait Posture 2002, 16, 215–232. [Google Scholar] [CrossRef] [PubMed]
- Hill, A.V. The heat of shortening and the dynamic constants of muscle. Proc. R. Soc. Lond. Ser. B-Biol. Sci. 1938, 126, 136–195. [Google Scholar]
- Lloyd, D.G.; Besier, T.F. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. J. Biomech. 2003, 36, 765–776. [Google Scholar] [CrossRef]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Neuromusculoskeletal modeling: Estimation of muscle forces and joint moments and movements from measurements of neural command. J. Appl. Biomech. 2004, 20, 367–395. [Google Scholar] [CrossRef]
- Lu, L.; Huang, C.; Song, X. Bifurcation control of a fractional-order PD control strategy for a delayed fractional-order prey–predator system. Eur. Phys. J. Plus 2023, 138, 1–11. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Z.; Li, P.; Yan, J.; Yao, L. Bifurcation mechanism for fractional-order three-triangle multi-delayed neural networks. Neural Process. Lett. 2022, 55, 6125–6151. [Google Scholar] [CrossRef]
- Li, P.; Peng, X.; Xu, C.; Han, L.; Shi, S. Novel extended mixed controller design for bifurcation control of fractional-order Myc/E2F/miR-17-92 network model concerning delay. Math. Methods Appl. Sci. 2023, 46, 18878–18898. [Google Scholar] [CrossRef]
- Shi, Y.; Dong, W.; Lin, W.; He, L.; Wang, X.; Li, P.; Gao, Y. Human Joint Torque Estimation Based on Mechanomyography for Upper Extremity Exosuit. Electronics 2022, 11, 1335. [Google Scholar] [CrossRef]
- Al-Timemy, A.H.; Zonnino, A.; Sergi, F. Estimating wrist joint torque using regression ensemble of bagged trees under multiple wrist postures. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1152–1157. [Google Scholar]
- Molinaro, D.D.; Kang, I.; Camargo, J.; Young, A.J. Biological hip torque estimation using a robotic hip exoskeleton. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 791–796. [Google Scholar]
- Song, Q.; Sun, B.; Lei, J.; Gao, Z.; Yu, Y.; Liu, M.; Ge, Y. Prediction of human elbow torque from EMG using SVM based on AWR information acquisition platform. In Proceedings of the 2006 IEEE International Conference on Information Acquisition, Veihai, China, 20–23 August 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1274–1278. [Google Scholar]
- Anwar, T.; Al Jumaily, A. EMG signal based knee joint torque estimation. In Proceedings of the 2016 International Conference on Systems in Medicine and Biology (ICSMB), Kharagpur, India, 4–7 January 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 182–185. [Google Scholar]
- Wu, G.; Zhang, J.; Li, G.; Wang, L.; Yu, Q.; Guo, J. Identification method of nonlinear maneuver model for unmanned surface vehicle from sea trial data based on support vector machine. J. Mech. Sci. Technol. 2022, 36, 4257–4267. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Z.; Hu, Y.; Smith, C.; Farewik, E.M.G.; Wang, R. Ankle joint torque estimation using an EMG-driven neuromusculoskeletal model and an artificial neural network model. IEEE Trans. Autom. Sci. Eng. 2020, 18, 564–573. [Google Scholar] [CrossRef]
- Peng, L.; Hou, Z.G.; Wang, W. A dynamic EMG-torque model of elbow based on neural networks. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2852–2855. [Google Scholar]
- Zhang, Y.; Zhang, X.; Lu, Z.; Jiang, Z.; Zhang, T. A novel wrist joint torque prediction method based on EMG and LSTM. In Proceedings of the 2020 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Xi’an, China, 10–13 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 242–245. [Google Scholar]
- Dai, X.; Andani, H.T.; Alizadeh, A.; Abed, A.M.; Smaisim, G.F.; Hadrawi, S.K.; Karimi, M.; Shamsborhan, M.; Toghraie, D. Using Gaussian Process Regression (GPR) models with the Matérn covariance function to predict the dynamic viscosity and torque of SiO2/Ethylene glycol nanofluid: A machine learning approach. Eng. Appl. Artif. Intell. 2023, 122, 106107. [Google Scholar] [CrossRef]
- Nguyen-Tuong, D.; Seeger, M.; Peters, J. Computed torque control with nonparametric regression models. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 212–217. [Google Scholar]
- Pei, X.; Zhou, Y.; Wang, N. A Gaussian process regression based on variable parameters fuzzy dominance genetic algorithm for B-TFPMM torque estimation. Neurocomputing 2019, 335, 153–169. [Google Scholar] [CrossRef]
- Siu, H.C.; Sloboda, J.; McKindles, R.J.; Stirling, L.A. A neural network estimation of ankle torques from electromyography and accelerometry. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1624–1633. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3572–3583. [Google Scholar] [CrossRef]
- Guo, Q.; Chen, Z. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty. Mech. Syst. Signal Proc. 2021, 146, 106869. [Google Scholar] [CrossRef]
- Zhang, L.; Soselia, D.; Wang, R.; Gutierrez-Farewik, E.M. Lower-limb joint torque prediction using LSTM neural networks and transfer learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 600–609. [Google Scholar] [CrossRef] [PubMed]
- Truong, M.T.N.; Ali, A.E.A.; Owaki, D.; Hayashibe, M. EMG-Based Estimation of Lower Limb Joint Angles and Moments Using Long Short-Term Memory Network. Sensors 2023, 23, 3331. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Yin, Y. Dependent-Gaussian-process-based learning of joint torques using wearable smart shoes for exoskeleton. Sensors 2020, 20, 3685. [Google Scholar] [CrossRef] [PubMed]
- Ullauri, J.B.; Peternel, L.; Ugurlu, B.; Yamada, Y.; Morimoto, J. On the EMG-based torque estimation for humans coupled with a force-controlled elbow exoskeleton. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 302–307. [Google Scholar]
- Wang, M.; Chen, Z.; Zhan, H.; Zhang, J.; Wu, X.; Jiang, D.; Guo, Q. Lower limb joint torque estimation by neural network and Sparse Gaussian Process with RIO Kernel. In Proceedings of the 2008 8th International Conference on Advanced Robotics and Mechatronics, Sanya, China, 8–10 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 809–814. [Google Scholar]
- Moreira, L.; Figueiredo, J.; Fonseca, P.; Vilas-Boas, J.P.; Santos, C.P. Lower limb kinematic, kinetic, and EMG data from young healthy humans during walking at controlled speeds. Sci. Data 2021, 8, 103. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Li, J.; Ju, Z.; Sun, Y.; Kong, J. A novel feature extraction method for machine learning based on surface electromyography from healthy brain. Neural Comput. Appl. 2019, 31, 9013–9022. [Google Scholar] [CrossRef]
- Toledo-Perez, D.; Rodriguez-Resendiz, J.; Gomez-Loenzo, R.A. A study of computing zero crossing methods and an improved proposal for EMG signals. IEEE Access 2020, 8, 8783–8790. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Sarkar, A.; Basak, P. Time domain multi-feature extraction and classification of human hand movements using surface EMG. In Proceedings of the 2017 4th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Thongpanja, S.; Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Mean and median frequency of EMG signal to determine muscle force based on time-dependent power spectrum. Elektron. Elektrotechnika 2013, 19, 51–56. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. LSTM can solve hard long time lag problems. In Proceedings of the 9th International Conference on Neural Information Processing Systems, Denver, CO, USA, 3–5 December 1996; Volume 9. [Google Scholar]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to forget: Continual prediction with LSTM. Neural Comput. 2000, 12, 2451–2471. [Google Scholar] [CrossRef]
- Cao, D.; Zhao, J.; Hu, W.; Zhang, Y.; Liao, Q.; Chen, Z.; Blaabjerg, F. Robust deep Gaussian process-based probabilistic electrical load forecasting against anomalous events. IEEE Trans. Ind. Inform. 2021, 18, 1142–1153. [Google Scholar] [CrossRef]
- Qiu, X.; Meyerson, E.; Miikkulainen, R. Quantifying point-prediction uncertainty in neural networks via residual estimation with an i/o kernel. arXiv 2019, arXiv:1906.00588. [Google Scholar]
- Titsias, M. Variational learning of inducing variables in sparse Gaussian processes. In Proceedings of the Artificial Intelligence and Statistics, PMLR, Clearwater Beach, FL, USA, 16–18 April 2009; pp. 567–574. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; Volume 1. [Google Scholar]
- Koriyama, T.; Kobayashi, T. Statistical parametric speech synthesis using deep Gaussian processes. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 948–959. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Age (Years) | Height (cm) | Weight (kg) |
|---|---|---|---|
| Subject 1 | 23.0 | 168.5 | 67.70 |
| Subject 2 | 23.0 | 172.0 | 57.20 |
| Subject 3 | 23.0 | 175.0 | 62.50 |
| Subject 4 | 22.0 | 174.5 | 61.75 |
| Average | 22.75 | 172.5 | 62.29 |
| Subject | Hip | Knee | Ankle | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NRMSE (%) | NRMSE (%) | NRMSE (%) | |||||||
| Subject 1 | 11.7438 | 0.9208 | 0.8299 | 12.3561 | 0.9102 | 0.8207 | 5.4290 | 0.9696 | 0.9318 |
| Subject 2 | 12.3223 | 0.9416 | 0.8583 | 14.3956 | 0.8973 | 0.7877 | 7.0349 | 0.9517 | 0.9010 |
| Subject 3 | 14.7159 | 0.9201 | 0.7949 | 14.1828 | 0.8360 | 0.7949 | 7.6790 | 0.9837 | 0.9646 |
| Subject 4 | 11.2691 | 0.9469 | 0.8512 | 16.8513 | 0.8615 | 0.6206 | 6.1971 | 0.9793 | 0.9469 |
| Average | 12.5128 | 0.9324 | 0.8336 | 14.4465 | 0.8763 | 0.7560 | 6.5850 | 0.9711 | 0.9361 |
| Subject | Hip | Knee | Ankle | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NRMSE (%) | R | NRMSE (%) | R | NRMSE (%) | R | ||||
| subject 1 | 8.6833 | 0.9661 | 0.9070 | 12.0694 | 0.9137 | 0.8290 | 5.3030 | 0.9558 | 0.8976 |
| subject 2 | 14.3114 | 0.9165 | 0.8088 | 15.9334 | 0.8870 | 0.7400 | 7.7864 | 0.9443 | 0.8175 |
| subject 3 | 16.1742 | 0.9245 | 0.7522 | 11.4735 | 0.9328 | 0.7999 | 6.2121 | 0.9801 | 0.9590 |
| subject 4 | 10.1146 | 0.9491 | 0.8802 | 17.9601 | 0.8583 | 0.5690 | 6.6049 | 0.9743 | 0.9334 |
| average | 12.3216 | 0.9391 | 0.8371 | 14.3591 | 0.8980 | 0.7335 | 6.4766 | 0.9636 | 0.9018 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Chen, Z.; Zhan, H.; Zhang, J.; Wu, X.; Jiang, D.; Guo, Q. Lower Limb Joint Torque Prediction Using Long Short-Term Memory Network and Gaussian Process Regression. Sensors 2023, 23, 9576. https://doi.org/10.3390/s23239576
Wang M, Chen Z, Zhan H, Zhang J, Wu X, Jiang D, Guo Q. Lower Limb Joint Torque Prediction Using Long Short-Term Memory Network and Gaussian Process Regression. Sensors. 2023; 23(23):9576. https://doi.org/10.3390/s23239576
Chicago/Turabian StyleWang, Mengsi, Zhenlei Chen, Haoran Zhan, Jiyu Zhang, Xinglong Wu, Dan Jiang, and Qing Guo. 2023. "Lower Limb Joint Torque Prediction Using Long Short-Term Memory Network and Gaussian Process Regression" Sensors 23, no. 23: 9576. https://doi.org/10.3390/s23239576
APA StyleWang, M., Chen, Z., Zhan, H., Zhang, J., Wu, X., Jiang, D., & Guo, Q. (2023). Lower Limb Joint Torque Prediction Using Long Short-Term Memory Network and Gaussian Process Regression. Sensors, 23(23), 9576. https://doi.org/10.3390/s23239576