

Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method for Vehicular Safety Messages


Abstract
:1. Introduction
- For the identification of a global optimal transmission path, HMDR initiates by constructing a path tree model spanning from the destination intersections back to the source intersection. It then pinpoints the most efficient route through a heuristic path search that emphasizes road section connectivity;
- To accurately evaluate the performance of candidate relays, the HDMR method employs a multi-attribute decision-making-based approach. This calculates the subjective and objective weights of candidate relays based on the ordinal relationship analysis method and the Criteria Importance Through Intercriteria Correlation (CRITIC) weighting method, respectively;
- The innovative HMDR strategy synergistically blends path search with relay selection, equipping it to manage safety message transmission in multifaceted traffic scenarios. Our experimental results underscore the effectiveness and proficiency of HMDR in this domain.
2. Related Work
3. Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method
3.1. System Model and Assumptions
- Initially, the vehicles with Poisson distribution travel in the urban traffic scenario with multiple lanes in both directions;
- Each vehicle is equipped with an On-board Unit (OBU) that utilizes a Dedicated Short-range Communication (DSRC) interface for Vehicle-to-vehicle (V2V) communication and obtains location information based on GPS and electronic map;
- Each vehicle receives road section information from the equipped electronic map, as well as periodical Beacon messages (including vehicle ID, speed, position, timestamp, etc.) from its neighbors, and maintains a road section information table and a neighbor information table;
- Both buildings and trees attenuate the RSS of safety messages, and each vehicle records the RSS values of monitored neighboring vehicles in the neighbor information table.
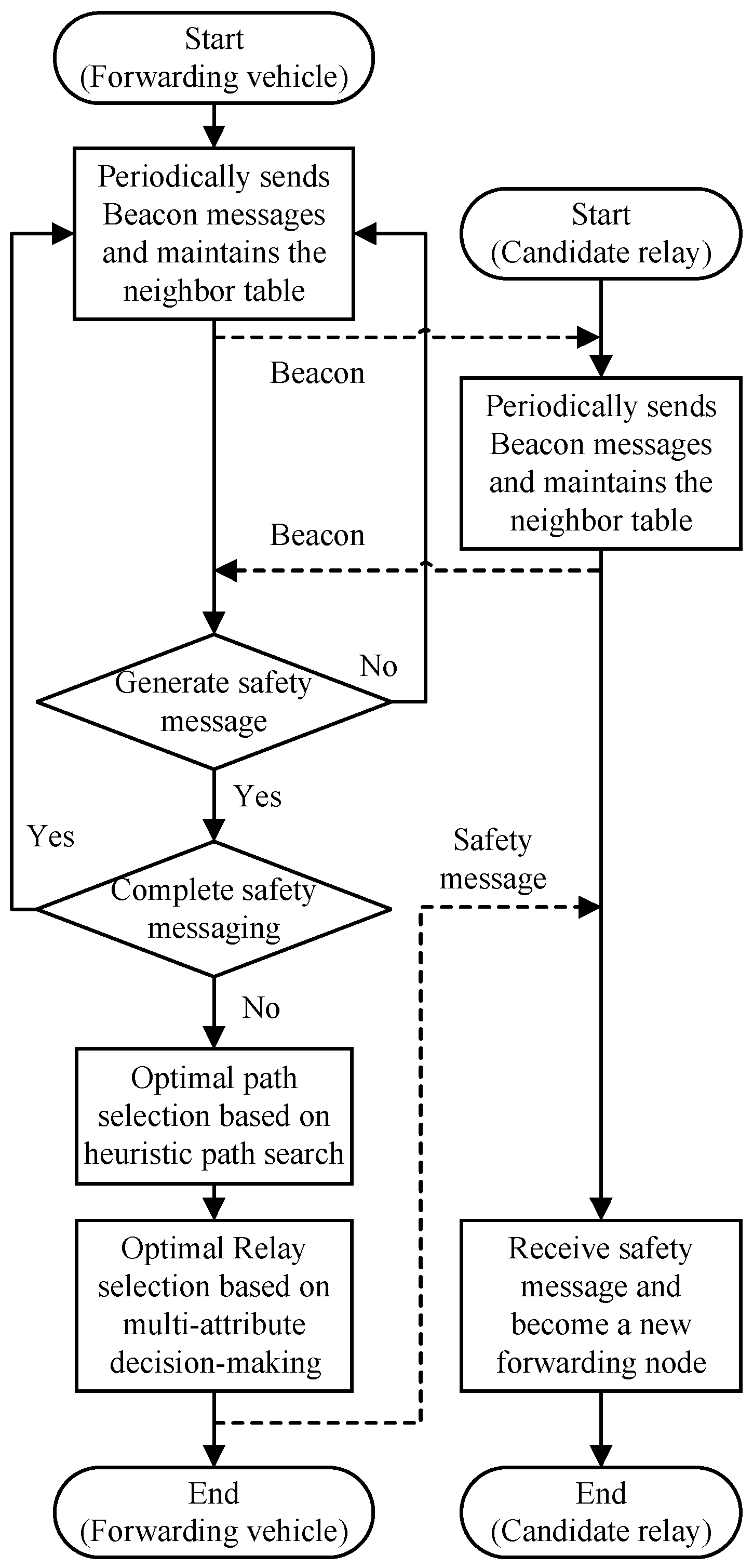
3.2. Overview of HDMR
3.3. Optimal Path Search
3.3.1. Path Tree Model
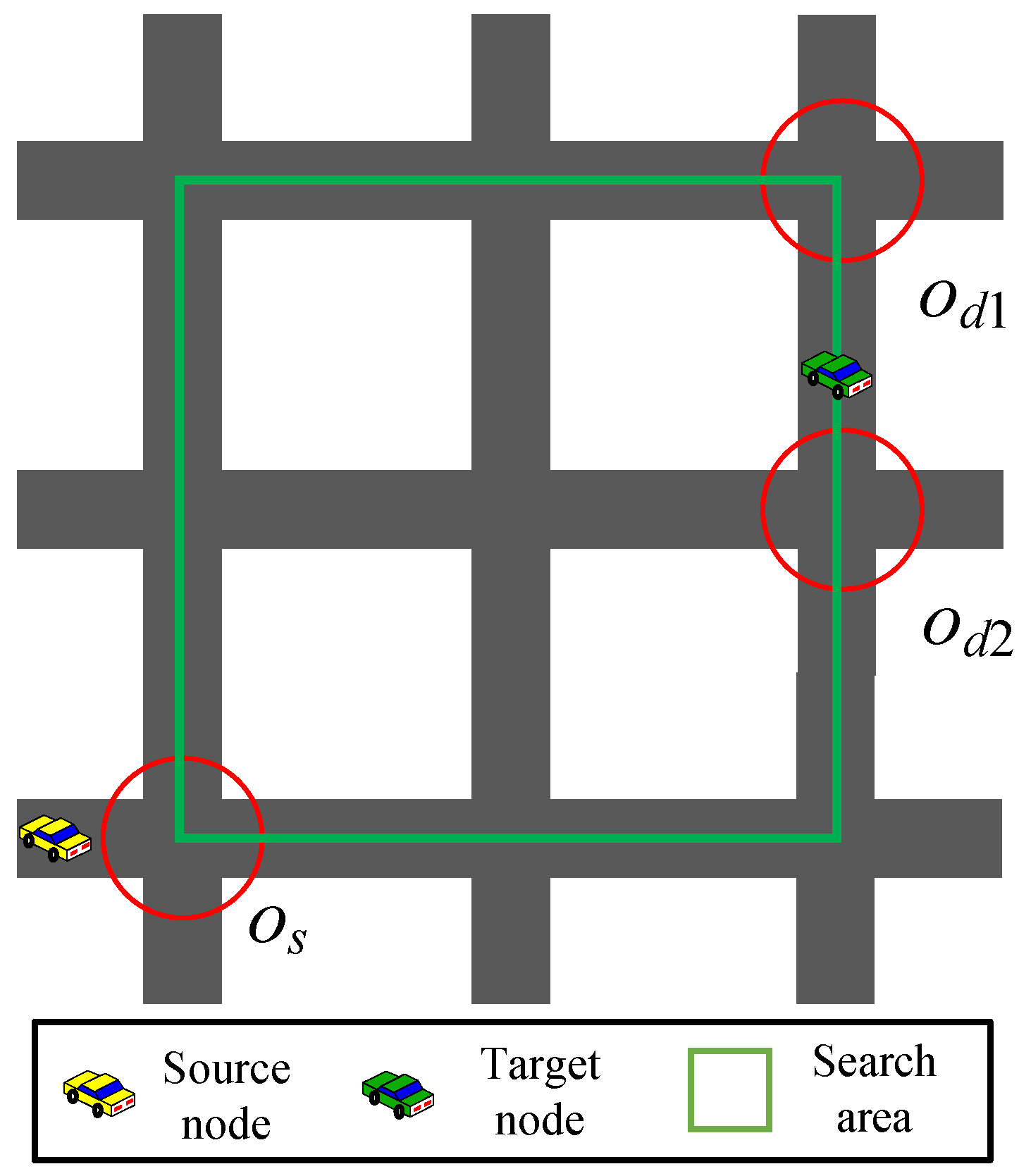
- Each path tree starts at a destination intersection and ends at the source intersection;
- When an intersection is added to a path tree, it is removed from the set of intersections to which it belongs;
- The children of an intersection in layer can only be its neighboring intersections in layer i;
- The construction of all path trees is completed when the intersection set is .
3.3.2. Connectivity Analysis of Road Sections
3.3.3. Heuristic Path Search
3.4. Optimal Relay Selection
3.4.1. Data Preprocessing
3.4.2. Relay Evaluation
3.4.3. Relay Selection
4. Experiments and Analysis
4.1. Experimental Scenario and Parameters
4.2. Experimental Results and Analysis
4.2.1. Sensitivity Analysis of the Value
4.2.2. Road Connectivity Analysis
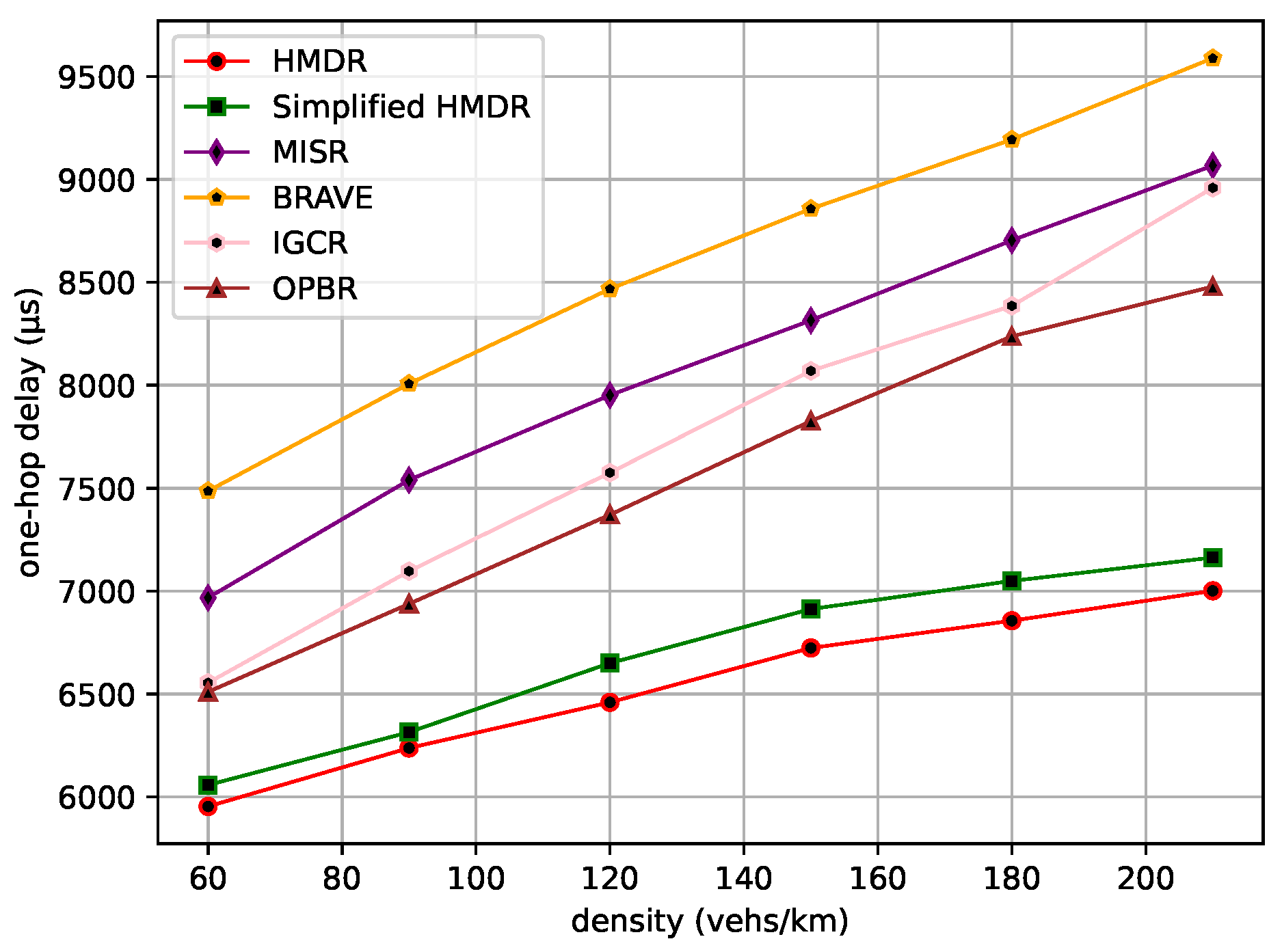
4.2.3. Comparative Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HDMR | Heuristic path search and multi-attribute decision-making-based routing method |
| RSS | Received signal strength |
| CRITIC | Criteria Importance through Intercriteria Correlation |
| VANET | Vehicular Ad Hoc Network |
| V2V | Vehicle-to-vehicle |
| V2I | Vehicle-to-infrastructure |
References
- Rafter, C.B.; Anvari, B.; Box, S.; Cherrett, T. Augmenting traffic signal control systems for urban road networks with connected vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1728–1740. [Google Scholar] [CrossRef]
- Nguyen, C.H.P.; Hoang, N.H.; Vu, H.L. A joint trajectory planning and signal control framework for a network of connected and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5052–5068. [Google Scholar] [CrossRef]
- Finkelberg, I.; Petrov, T.; Gal-Tzur, A.; Zarkhin, N.; Počta, P.; Kováčiková, T.; Buzna, L.; Dado, M.; Toledo, T. The effects of vehicle-to-infrastructure communication reliability on performance of signalized intersection traffic control. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15450–15461. [Google Scholar] [CrossRef]
- Wu, H.; Zhou, H.; Zhao, J.; Xu, Y.; Qian, B.; Shen, X. Deep learning enabled fine-grained path planning for connected vehicular networks. IEEE Trans. Veh. Technol. 2022, 71, 10303–10315. [Google Scholar] [CrossRef]
- Zhao, J.; Ma, X.; Yang, B.; Chen, Y.; Zhou, Z.; Xiao, P. Global path planning of unmanned vehicle based on fusion of A* algorithm and Voronoi field. J. Intell. Connect. Veh. 2022, 5, 250–259. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, S.; Ge, H.; Fan, P.; Fan, Q.; Letaief, K.B. Delay-sensitive task offloading in vehicular fog computing-assisted platoons. IEEE Trans. Netw. Serv. Manag. 2023, 1–16. [Google Scholar] [CrossRef]
- Wu, Q.; Zhao, Y.; Fan, Q.; Fan, P.; Wang, J.; Zhang, C. Mobility-aware cooperative caching in vehicular edge computing based on asynchronous federated and deep reinforcement learning. IEEE J. Sel. Top. Signal Process. 2023, 17, 66–81. [Google Scholar] [CrossRef]
- Wu, Q.; Shi, S.; Wan, Z.; Fan, Q.; Fan, P.; Zhang, C. Towards V2I age-aware fairness access: A DQN based intelligent vehicular node training and test method. Chin. J. Electron. 2023, 32, 1230–1244. [Google Scholar]
- Takahashi, K.; Shioda, S. Distributed congestion control method for sending safety messages to vehicles at a set target distance. Ann. Telecommun. 2023, 1–15. [Google Scholar] [CrossRef]
- St. Amour, B.; Jaekel, A. Data rate selection strategies for periodic transmission of safety messages in VANET. Electronics 2023, 12, 3790. [Google Scholar] [CrossRef]
- Han, R.; Shi, J.; Guan, Q.; Banoori, F.; Shen, W. Speed and position aware dynamic routing for emergency message dissemination in VANETs. IEEE Access 2022, 10, 1376–1385. [Google Scholar] [CrossRef]
- Chen, X.; Yang, A.; Tong, Y.; Weng, J.; Weng, J.; Li, T. A multisignature-based secure and OBU-friendly emergency reporting scheme in VANET. IEEE Internet Things J. 2022, 9, 23130–23141. [Google Scholar] [CrossRef]
- Perkins, C.E.; Bhagwat, P. Highly dynamic destination-sequenced distance-vector routing (DSDV) for mobile computers. Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the Second IEEE Workshop on Mobile Computing Systems and Applicationss, New Orleans, LA, USA, 25–26 February 1999. [Google Scholar]
- Kanani, P.; Patil, N.; Shelke, V.; Salot, K.; Nanavati, A.; Damodaran, N.; Desai, S. Improving QoS of DSDV protocol to deliver a successful collision avoidance message in case of an emergency in VANET. Soft Comput. 2023, 1–11. [Google Scholar] [CrossRef]
- Malnar, M.; Jevtic, N. An improvement of AODV protocol for the overhead reduction in scalable dynamic wireless ad hoc networks. Wirel. Netw. 2022, 28, 1039–1051. [Google Scholar] [CrossRef]
- Zhang, D.; Gong, C.; Zhang, T.; Zhang, J.; Piao, M. A new algorithm of clustering AODV based on edge computing strategy in IOV. Wirel. Netw. 2021, 27, 2891–2908. [Google Scholar] [CrossRef]
- Kandali, K.; Bennis, L.; Bennis, H. A new hybrid routing protocol using a modified k-means clustering algorithm and continuous hopfield network for VANET. IEEE Access 2021, 9, 47169–47183. [Google Scholar] [CrossRef]
- Raja, M. PRAVN: Perspective on road safety adopted routing protocol for hybrid VANET-WSN communication using balanced clustering and optimal neighborhood selection. Soft Comput. 2021, 25, 4053–4072. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th International Conference on Mobile Computing and Networking (Mobicom 2000), Boston, MA, USA, 6–11 August 2000. [Google Scholar]
- Zhang, W.; Jiang, L.; Song, X.; Shao, Z. Weight-Based PA-GPSR Protocol Improvement Method in VANET. Sensors 2023, 23, 5991. [Google Scholar] [CrossRef]
- Chen, C.; Liu, L.; Qiu, T.; Yang, K.; Gong, F.; Song, H. ASGR: An artificial spider-web-based geographic routing in heterogeneous vehicular networks. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1604–1620. [Google Scholar] [CrossRef]
- Rana, K.K.; Sharma, V.; Tiwari, G. Fuzzy logic-based multi-hop directional location routing in vehicular ad hoc network. Wirel. Pers. Commun. 2021, 121, 831–855. [Google Scholar] [CrossRef]
- Hawbani, A.; Wang, X.; Al-Dubai, A.; Zhao, L.; Busaileh, O.; Liu, P.; Al-Qaness, M.A.A. A novel heuristic data routing for urban vehicular ad hoc networks. IEEE Internet Things J. 2021, 8, 8976–8989. [Google Scholar] [CrossRef]
- Chaib, N.; Oubbati, O.S.; Bensaad, M.L.; Lakas, A.; Lorenz, P.; Jamalipour, A. BRT: Bus-based routing technique in urban vehicular networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4550–4562. [Google Scholar] [CrossRef]
- Su, W.; Lee, S.-J.; Gerla, M. Mobility prediction and routing in ad hoc wireless networks. Int. J. Netw. Manag. 2001, 11, 3–30. [Google Scholar] [CrossRef]
- Ruiz, P.M.; Cabrera, V.; Martinez, J.A.; Ros, F.J. BRAVE: Beacon-less routing algorithm for vehicular environments. In Proceedings of the 7th IEEE International Conference on Mobile Ad-hoc and Sensor Systems (IEEE MASS 2010), San Francisco, CA, USA, 8–12 November 2010. [Google Scholar]
- Zhou, S.; Li, D.; Tang, Q.; Fu, Y.; Guo, C.; Chen, X. Multiple intersection selection routing protocol based on road section connectivity probability for urban VANETs. Comput. Commun. 2021, 177, 255–264. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Ahmed, M.; Jeon, G. An enhanced multi-hop intersection-based geographical routing protocol for the internet of connected vehicles network. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3850–3858. [Google Scholar] [CrossRef]
- Diaa, M.K.; Mohamed, I.S.; Hassan, M.A. OPBRP-obstacle prediction based routing protocol in VANETs. Ain Shams Eng. J. 2023, 14, 101989. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| denotes road intersections, is the source, and and are the targets. | |
| , | The road section that joins two intersections , and its length is |
| denotes the candidate relays of the current forwarding vehicle. | |
| denotes the evaluation metrics of candidate relays. | |
| The location of the current forwarding vehicle. | |
| The location of . | |
| R | The transmission radius of the vehicles. |
| The speed of the current forwarding vehicle. | |
| The speed of . | |
| The maximum speed limit of vehicles. | |
| The direction angle between the current forwarding vehicle and . | |
| The RRS value of recorded by the current forwarding vehicle. | |
| , | The minimum and maximum thresholds of the RRS value. |
| The area density of . | |
| The maximum area density of vehicles. | |
| The connectivity of . |
| The Value of | Description |
|---|---|
| 1.0 | is as equally important as . |
| 2.0 | is slightly more important than . |
| 3.0 | is significantly more important than . |
| 4.0 | is more important than . |
| 5.0 | is extremely more important than . |
| Parameter | Value |
|---|---|
| Transmission radius R/m | 270 |
| Vehicle speed | 8∼16 |
| Maximum vehicle density | 250 |
| Minimum RSS threshold | −85 |
| Beacon sending interval/s | 1 |
| Minimum distance between vehicles/m | 1 |
| The value of | 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, L.; Zhang, J.; Bao, H.; Huo, Y. Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method for Vehicular Safety Messages. Sensors 2023, 23, 9506. https://doi.org/10.3390/s23239506
Nie L, Zhang J, Bao H, Huo Y. Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method for Vehicular Safety Messages. Sensors. 2023; 23(23):9506. https://doi.org/10.3390/s23239506
Chicago/Turabian StyleNie, Lei, Junjie Zhang, Haizhou Bao, and Yiming Huo. 2023. "Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method for Vehicular Safety Messages" Sensors 23, no. 23: 9506. https://doi.org/10.3390/s23239506
APA StyleNie, L., Zhang, J., Bao, H., & Huo, Y. (2023). Heuristic Path Search and Multi-Attribute Decision-Making-Based Routing Method for Vehicular Safety Messages. Sensors, 23(23), 9506. https://doi.org/10.3390/s23239506