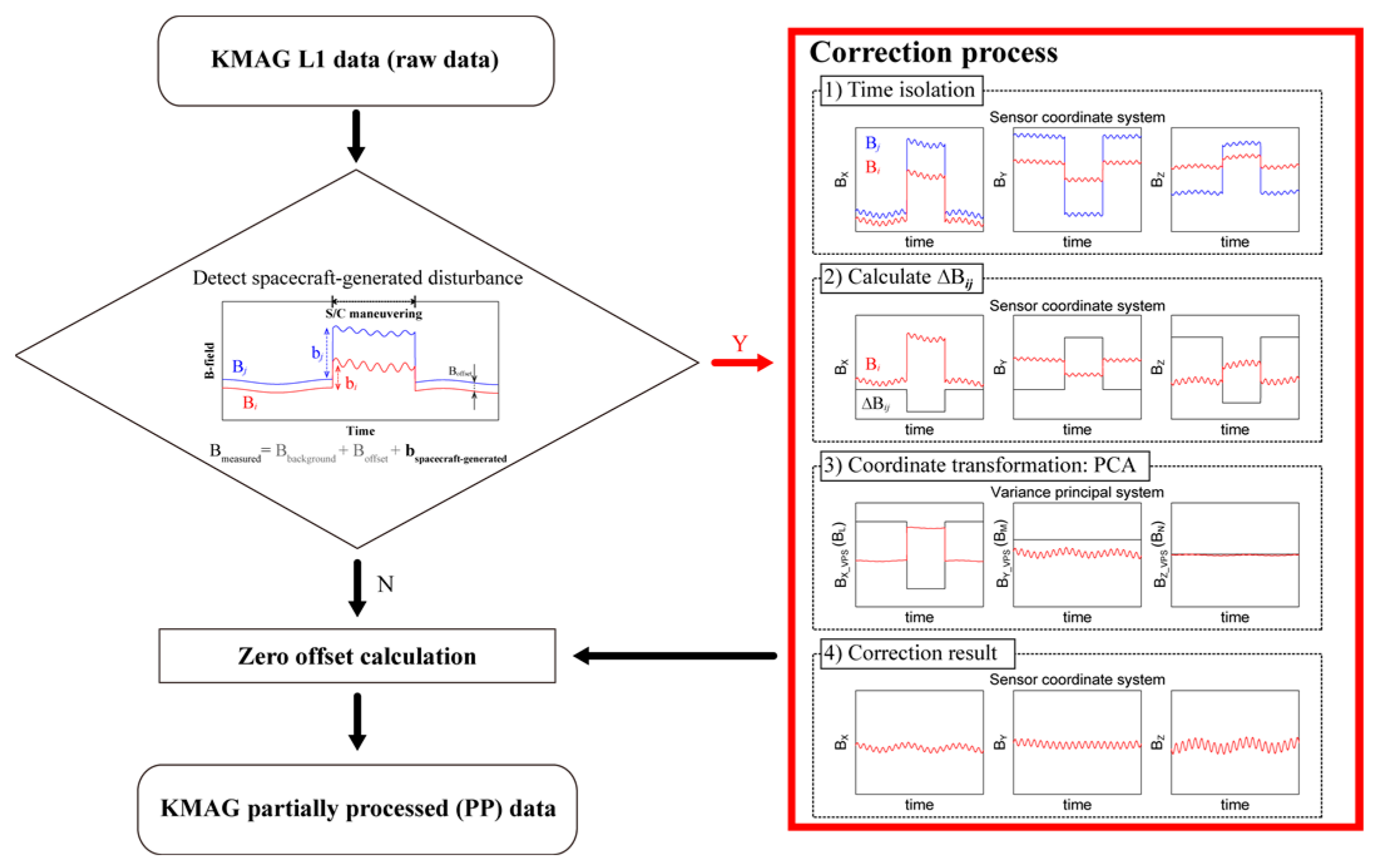
Before the lunar orbit insertion, the KMAG team conducted a calibration procedure to account for the disturbances generated by the spacecraft maneuvering and calculated the daily zero-offset value for the dataset. Two days after deploying the KMAG boom, an unexpected disturbance appeared in the KMAG observation data from the spacecraft maneuvering. Since the zero-offset calculation uses the method that minimizes the variance in the field magnitude, the measured magnetic field containing disturbances made the result of the zero-offset calculation inaccurate. This section outlines a case concerning the clearance results and process associated with a spacecraft-generated disturbance on 6 August 2022 at a position just outside the Earth’s bow shock.
4.1. Comparison of DSCOVR FGM and KMAG
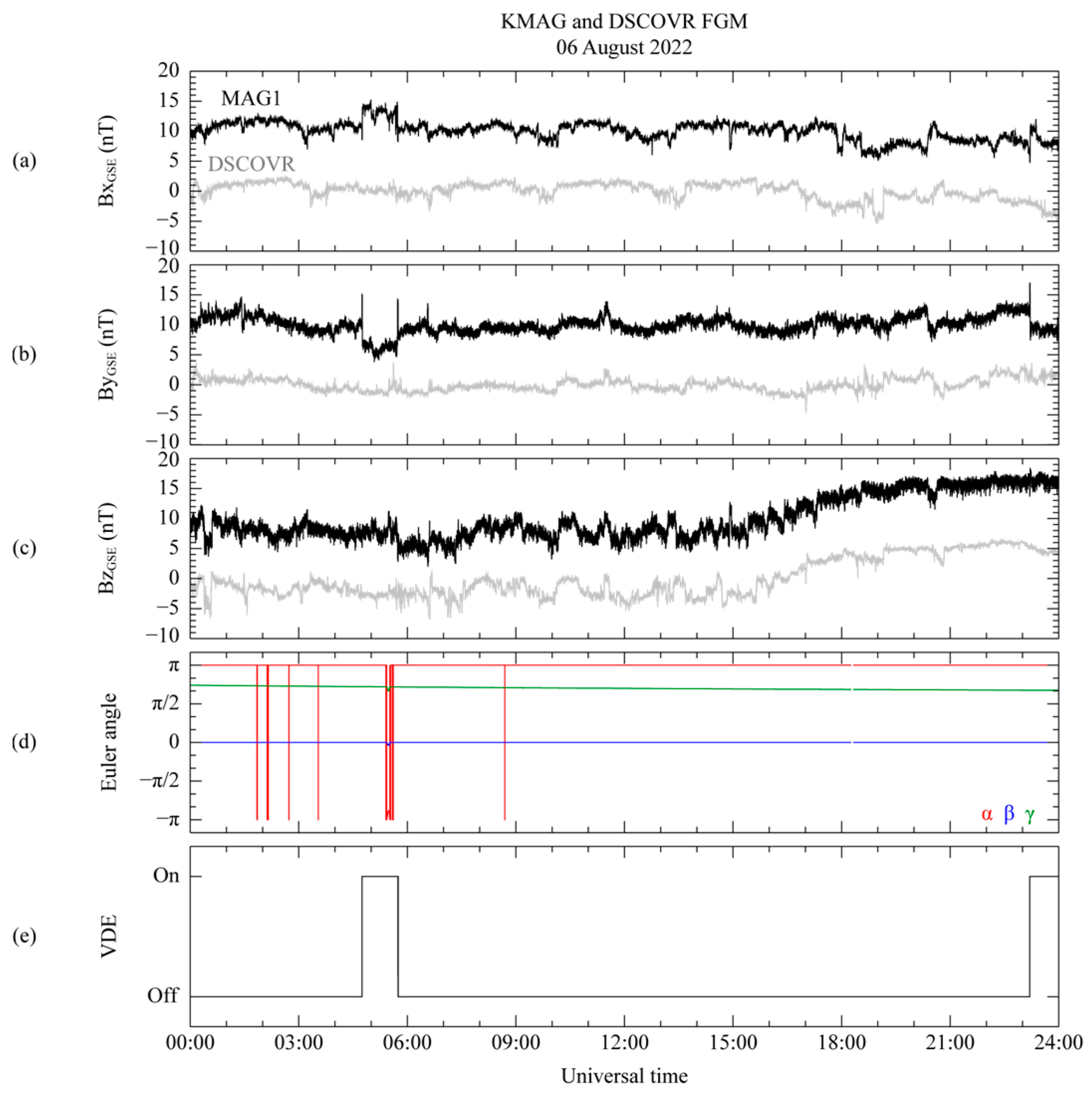
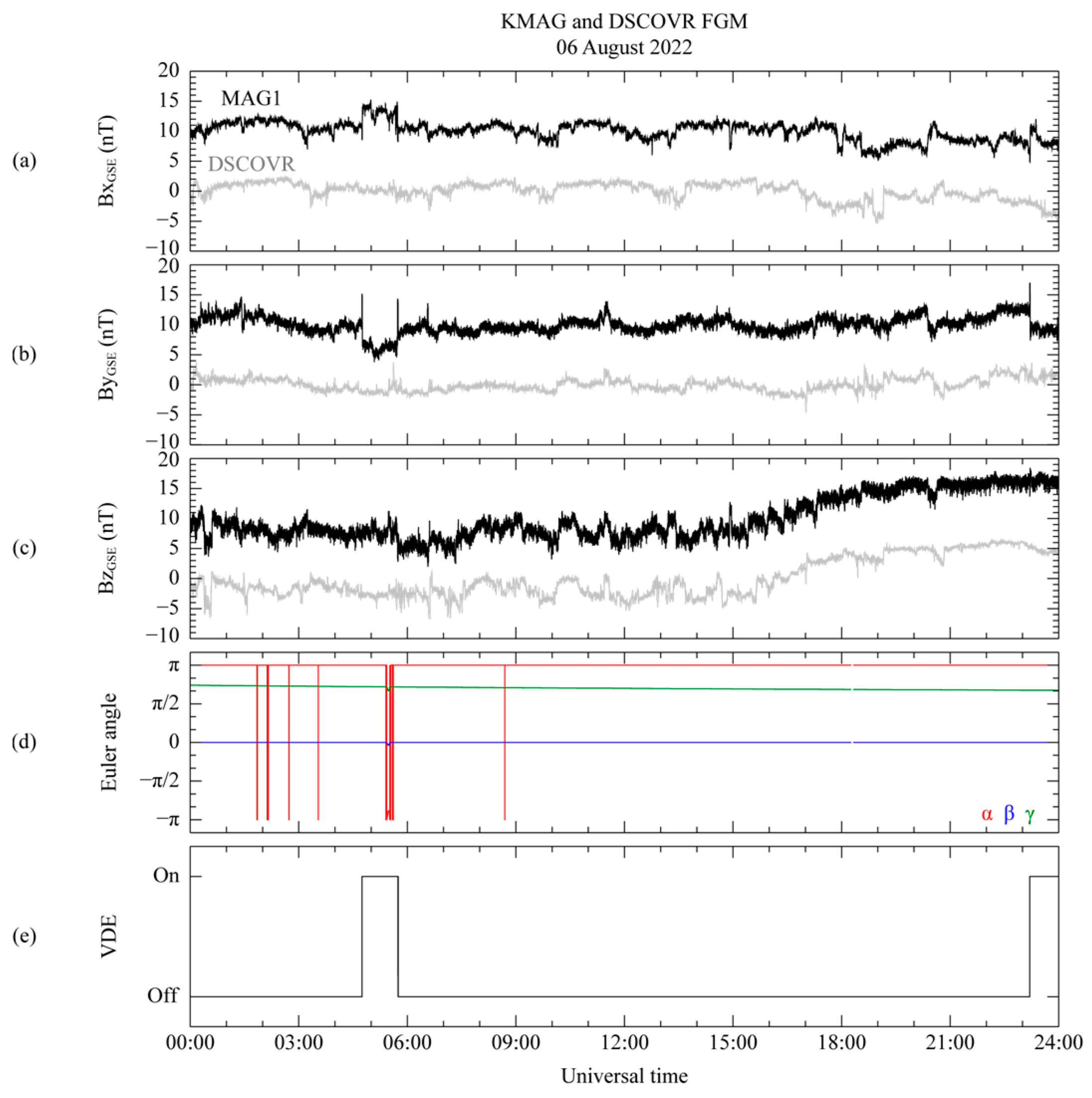
Figure 3 displays the time series of the magnetic field measured by the KPLO MAG1 and DSCOVR FGM using the GSE coordinate system and the operational information from the KPLO satellite related to the attitude and interior electronics on 6 August 2022. All the components of the magnetic field data from MAG1 are displayed in
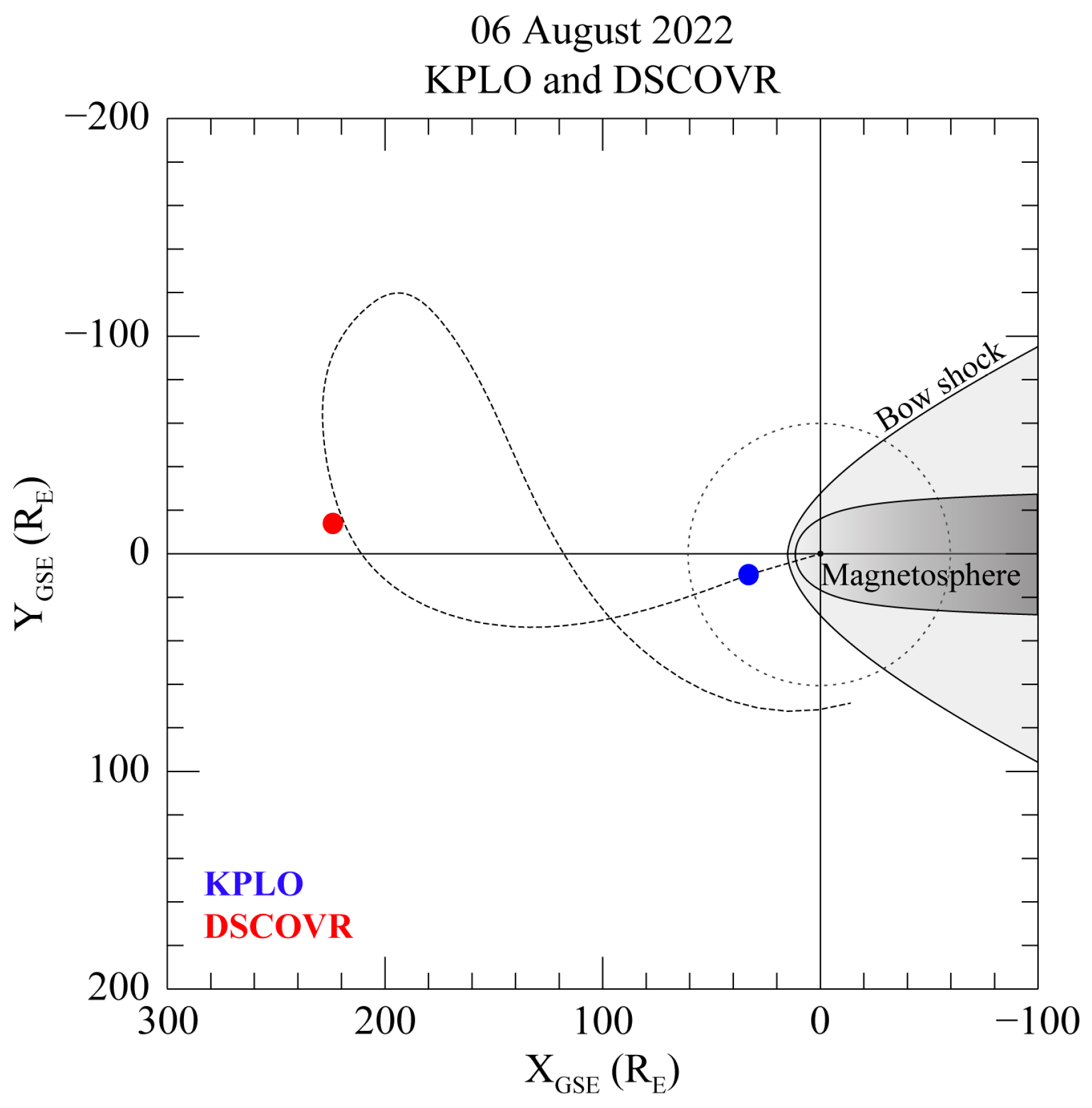
Figure 3a–c; 10 nT is added after subtracting the daily averaged value to compare the data with the DSCOVR FGM measurements. It is worth noting that the daily averaged value from MAG1 does not represent its daily zero-offset value. Additionally, we confirmed that there were no dynamic solar wind events during the same period. As shown in
Figure 4, the DSCOVR satellite is positioned at the L
1 point (223.9 R
E, −14.9 R
E, −24.4 R
E) in the geocentric solar ecliptic (GSE) coordinate system, while the KPLO is located just outside the Earth’s bow shock (32.9 R
E, 8.7 R
E, −8.2 R
E), with R
E referring to the Earth’s radius. According to Richardson and Paularena [
18], if the difference in distance of both satellites in the GSE Y–Z plane is less than 50 R
E in the interplanetary medium, it is possible to measure the same solar magnetic field. Therefore, since the distance between the DSCOVER and KPLO satellites is approximately 16 R
E on the Y–Z plane, the KMAG can observe a similar magnetic field to that measured by DSCOVR FGM. Nevertheless, the difference of ~191 R
E between the two satellites along the X
GSE direction causes a 40 min delay in solar wind propagation. The calculations for this time delay are applied to the KMAG measurements in
Figure 3.
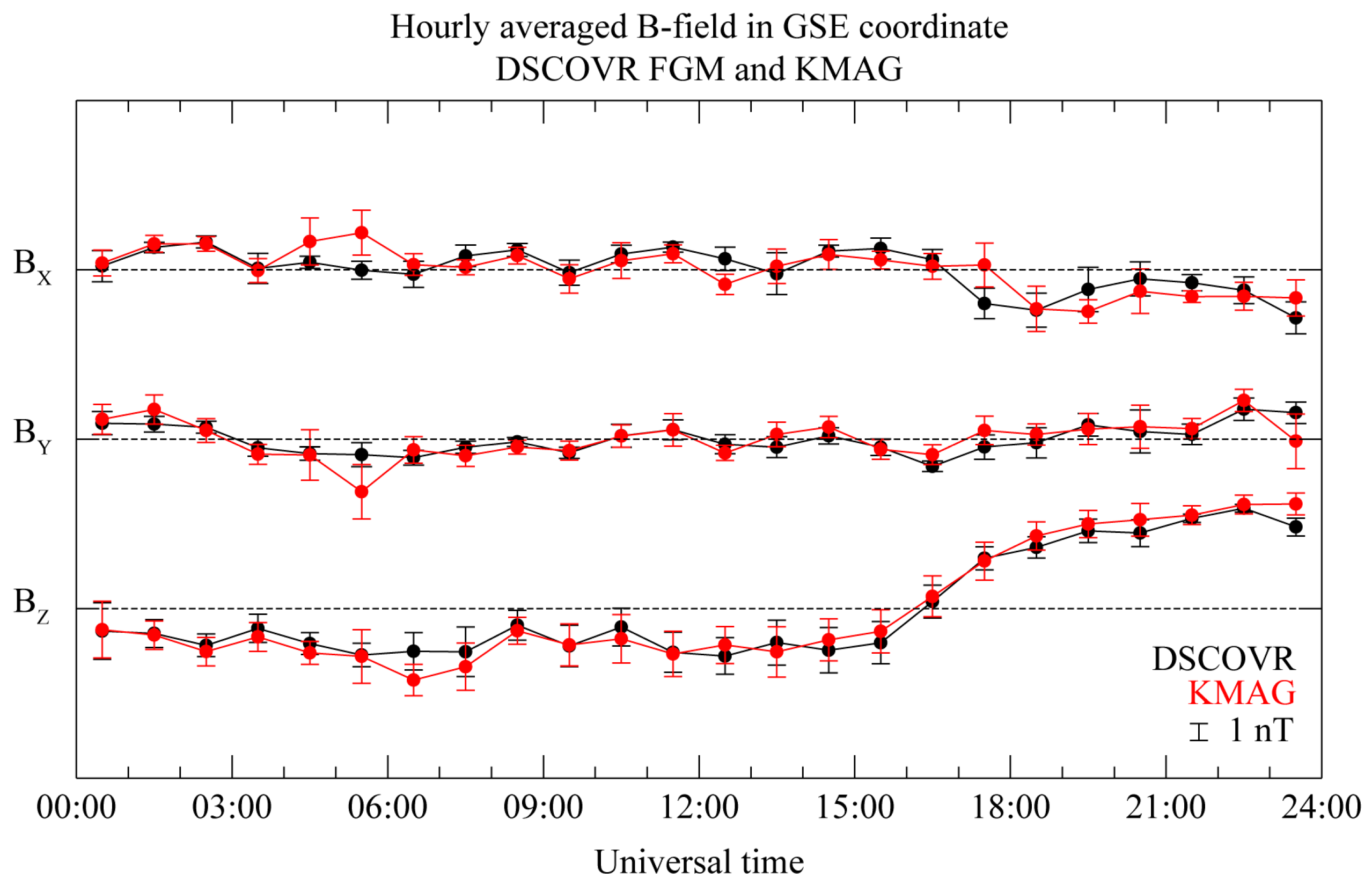
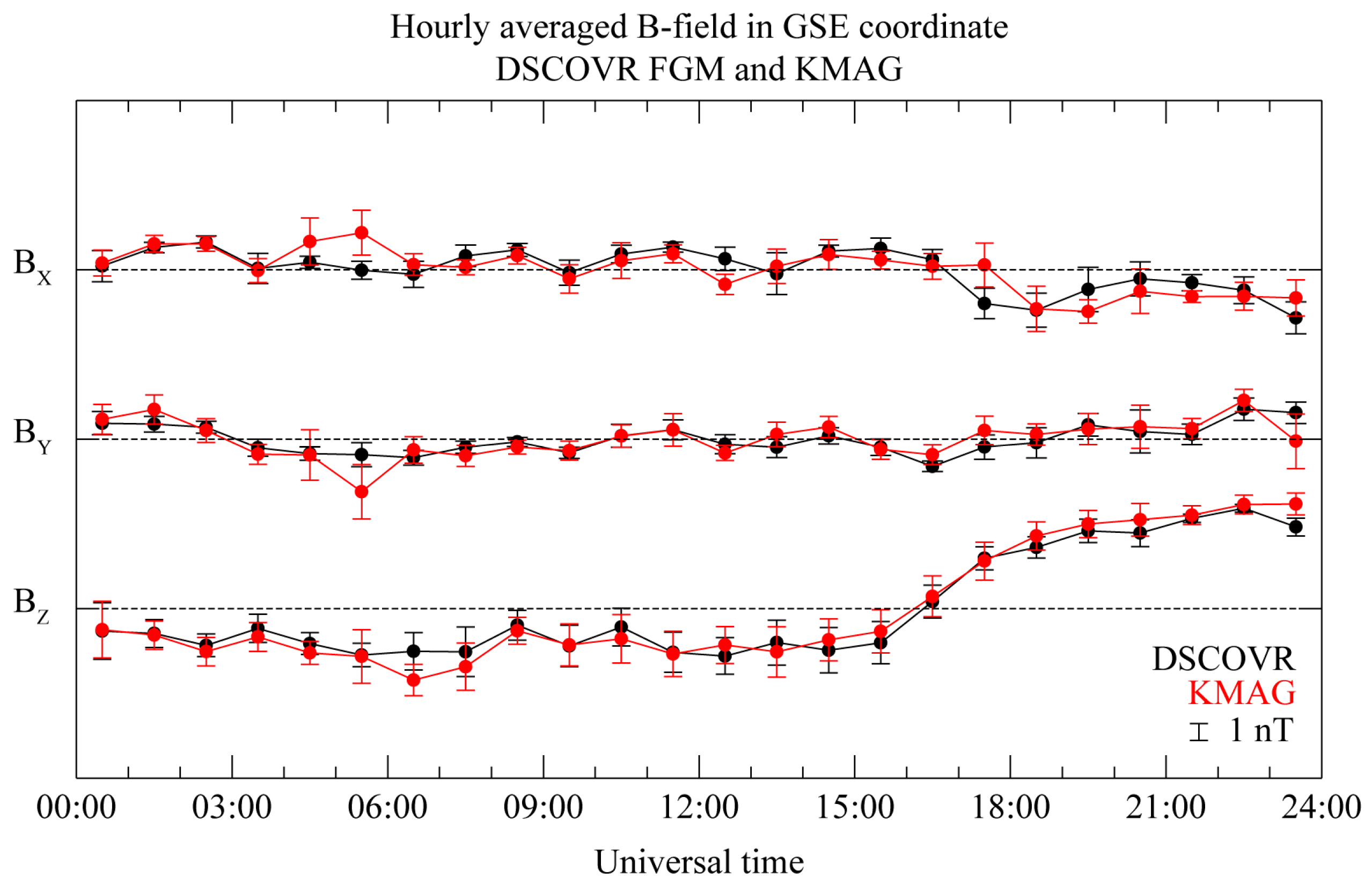
To evaluate the consistency of the magnetic measurements from each position within the interplanetary region, we conducted a comparison of the hourly averaged magnetic fields, as illustrated in
Figure 5. Given the absence of significant interplanetary magnetic field (IMF) variations within a 1 h window during quiet solar wind conditions, we calculated the standard deviation based on 1 h boxcar averaged data without temporal overlaps. The relationship between the measurements shows notably high correlation coefficients of 0.77, 0.86, and 0.98 for the B
X, B
Y, and B
Z components, respectively, except for a 2 h interval starting from 04:00 UT. In addition, the background magnetic field, as measured by DSCOVR FGM, exhibits a standard deviation of less than 1 nT throughout the entire observation period. The MAG1 measurements show a comparable standard deviation of less than 1 nT over the same duration. However, there are instances of abrupt and substantial variations in the averaged magnitude and standard deviation, particularly for the B
X and B
Y components in the MAG1 measurements. These variations increase up to four times compared to the DSCOVR FGM measurements during the time intervals of 04:44 to 05:44 UT and 23:11 to 24:00 UT, which can be characterized as unknown disturbed periods.
This result suggests two perspectives. Firstly, the consistency of the observations between DSCOVR FGM and KMAG shows that KMAG is a reliable tool for magnetic field measurements. Secondly, considering that DSCOVR FGM can accurately observe the background magnetic field, the difference in the measurements between the two satellites for the unknown disturbed period implies that the KMAG measurements may have originated from other magnetic sources.
Thus, for the results in
Figure 3a–c, it is considered that KMAG measured the magnetic fields related to different magnetic sources in the background field during the unknown disturbed period. To find the disturbed magnetic source, we conducted a survey of the satellite’s attitude data.
Figure 3d confirms that the satellite’s Euler angle for all directions suddenly varied for about 12 min from 05:24 to 05:36 UT. Variations in the spacecraft’s Euler angles indicate changes in its attitude, such as spinning or flipping, which is strongly linked to the disturbed magnetic field. When the spacecraft’s attitude changes, the operation of the electronic equipment within its body is typically expected. However, this finding is inadequate to explain the measurement taken before 05:24 UT. To find the disturbance source, an additional investigation was conducted to determine the relationship between the spacecraft-generated disturbance and spacecraft maneuvering using the monitoring data from the valve drive electronics (VDE), as depicted in
Figure 3e.
The identification of the VDE activation indicates that the circuit inside the spacecraft is carrying an electrical current relevant to the operation of the thrusters, as indicated by as turned-on or -off signals depending on whether the electronic devices are activated or not. The VDE switching signal clearly coincides with the time of the abrupt variations in the KMAG observation data, or the unknown disturbance period. For example, the occurrence of the VDE switching-on signal for 1 h from 04:44 UT accurately coincides with the abrupt variations in the KMAG measurements. Consequently, these abrupt variations in the measurements, as depicted in
Figure 3a–c, indicate that the measurement includes artificial disturbances generated by the spacecraft.
4.2. Elimination of Artificial Disturbance
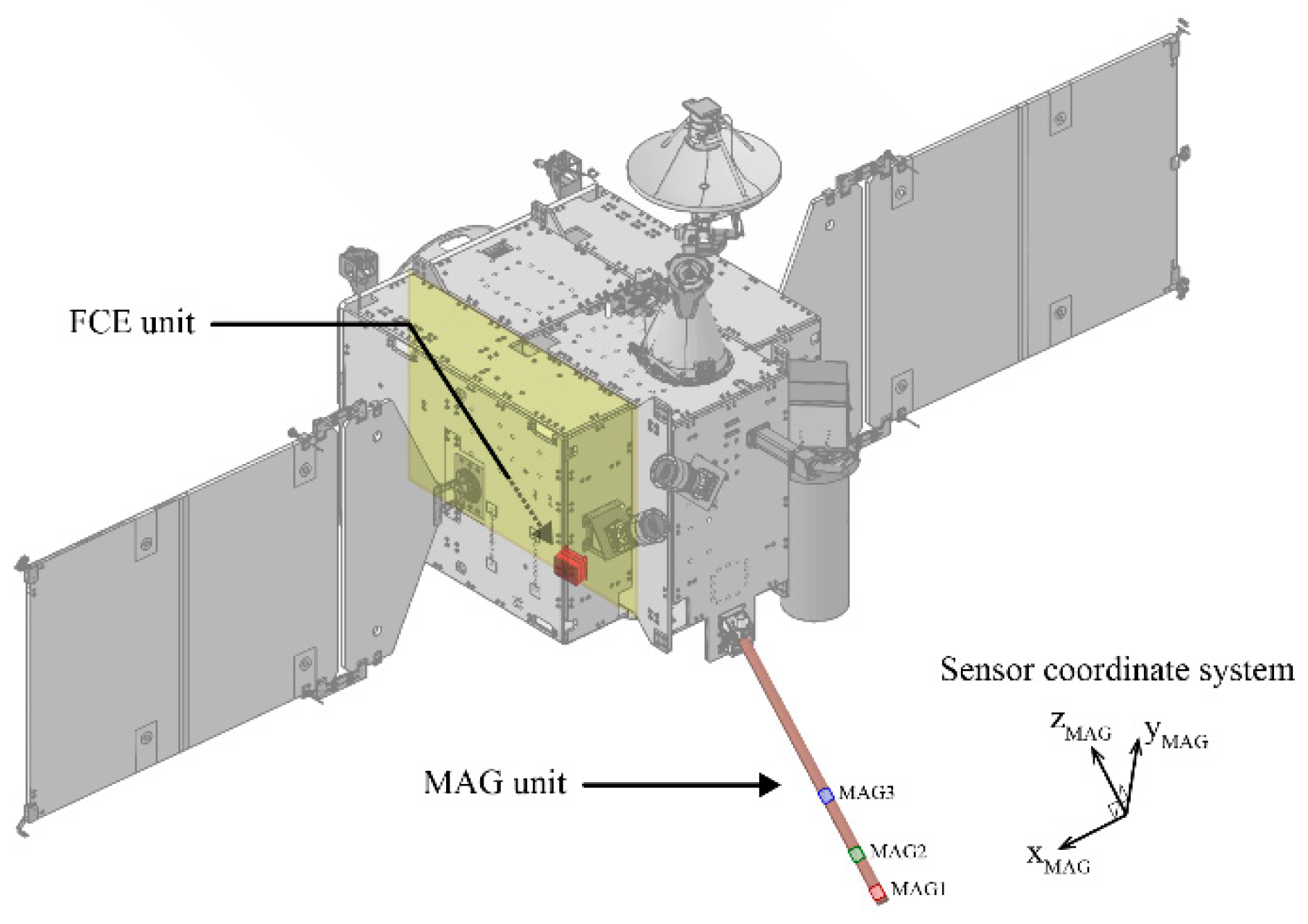
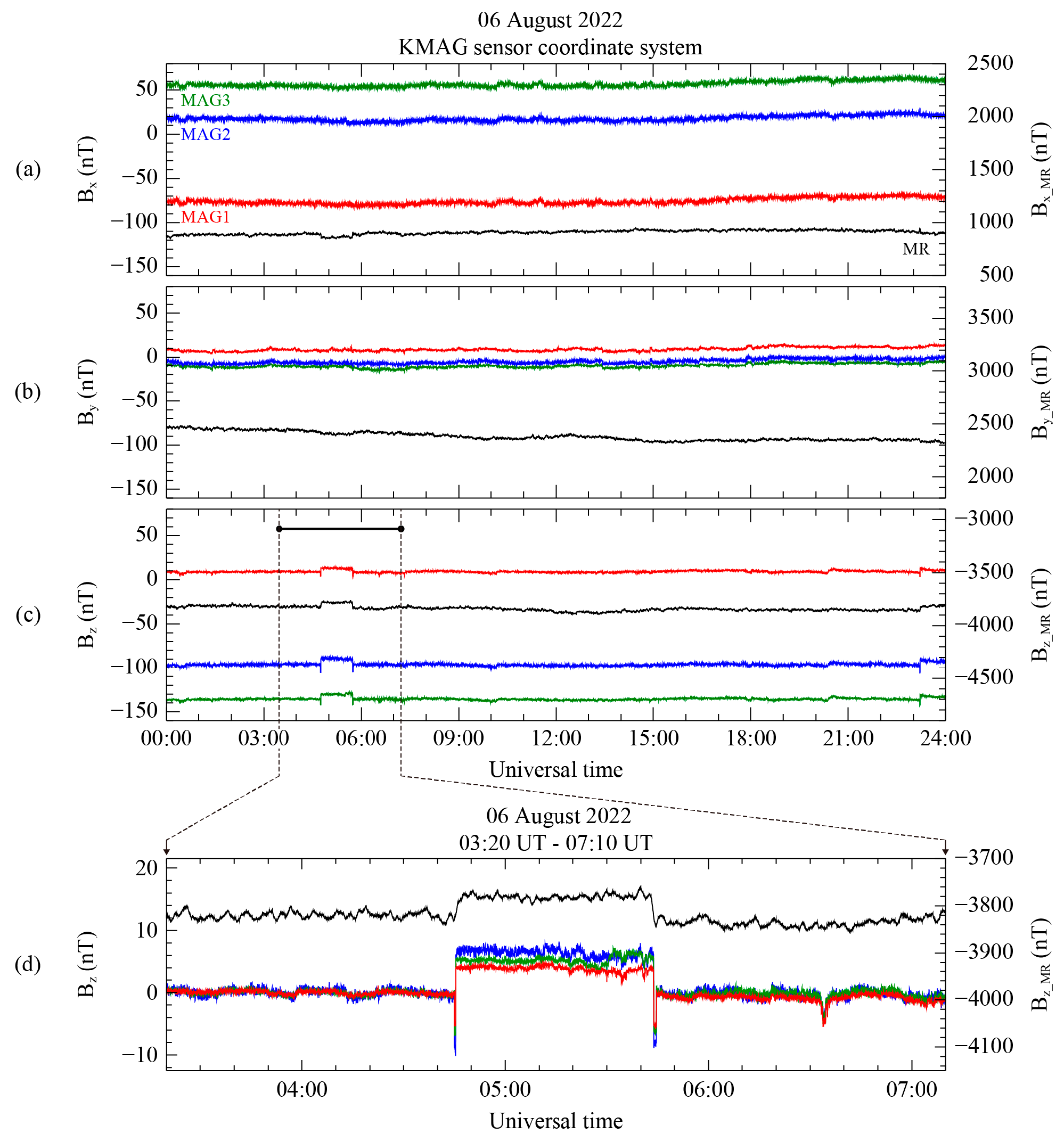
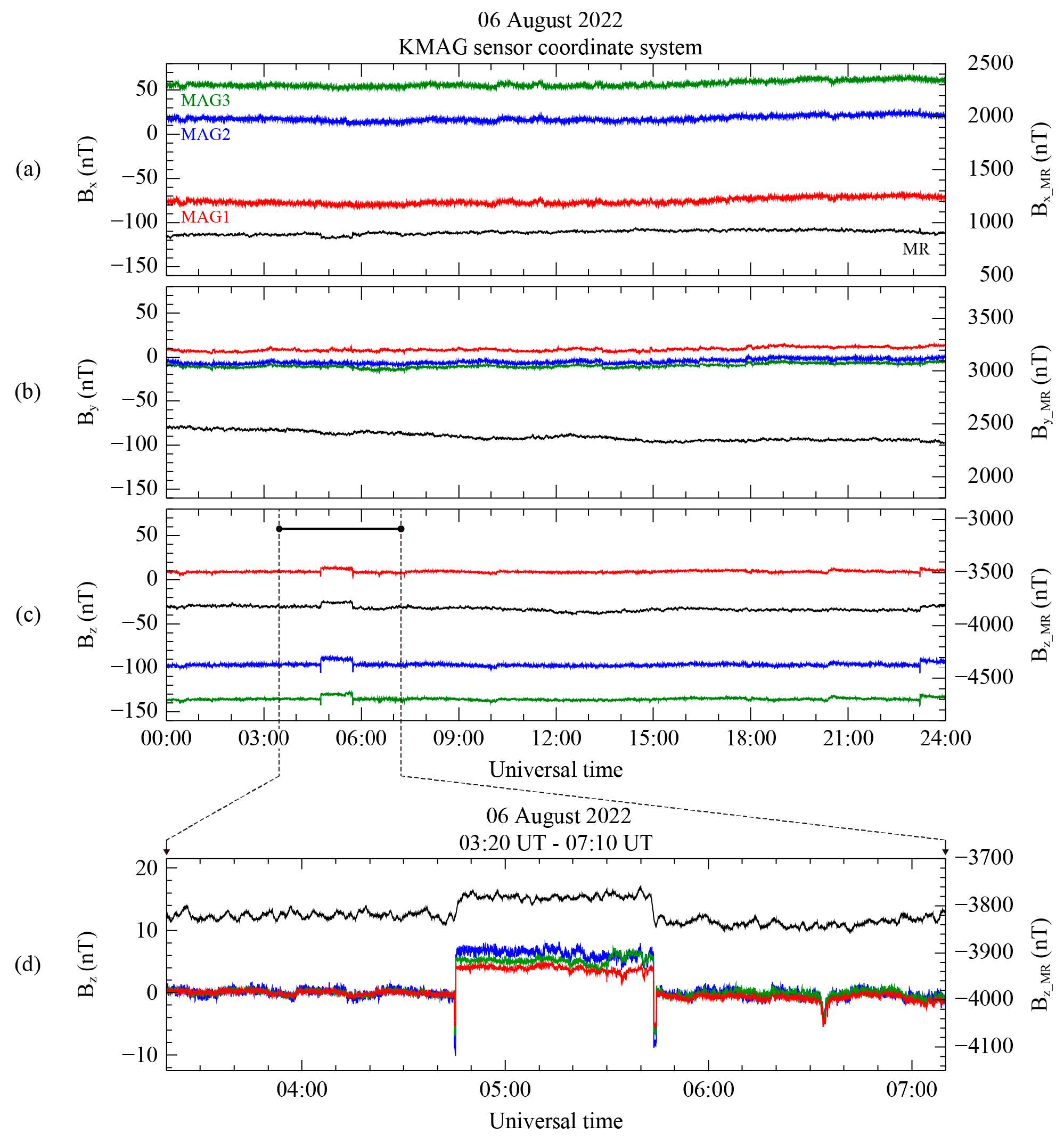
Figure 6 shows the measurements from the MAG1, MAG2, MAG3, and MR sensors on 6 August 2022, in the sensor reference coordinate system. Note that since the zero-offset calculation was not yet applied to each sensor’s data, the magnetic field observation in
Figure 6 does not represent a realistic value for the background field. The MAG and MR measurements are expressed on the left and right axes, respectively, in units of nT. In
Figure 5a, the abrupt changes in the B
X component from all MAG sensors, as visible in
Figure 3, are not shown from 04:44 to 05:44 UT. However, there is a decrease of approximately 40 nT in the measured B
X for the MR sensor. As shown in
Figure 6b, although the B
Y from the MR sensor gradually decreases over time by about 100 nT, the MAG and MR sensor measurements show no evidence of the artificial disturbance toward the Y direction. The B
Z components from the MAG and MR sensors in
Figure 6c simultaneously show a step-like shaped disturbance from 04:44 to 05:44 UT.
The magnitude of this disturbance increased suddenly compared to the period before the disturbance, by ~4.5 nT for MAG1, ~6.1 nT for MAG2, ~7.0 nT for MAG3, and ~60.0 nT for MR. These varying disturbance magnitudes are dependent on the distance of each sensor from the center of the spacecraft. The relationship between the disturbance magnitude and the sensor position obviously indicates the presence of an additional magnetic source within the spacecraft body. By analyzing the readings from the MR sensor, which detected a disturbance in the B
X and B
Z components, it can be deduced that the magnetic disturbance was caused by a source with a magnetic moment aligned parallel to the B
Y component. Hence, the detection of magnetic disturbances with all sensors exhibiting distance-dependent variations in the same directional components again strongly supports that these disturbances originated from within the satellite’s interior.
Figure 6d shows a zoomed-in view of the 230 min interval in regard to the BZ component of the magnetic field measurement for all the KMAG sensors, indicated by the black bar in
Figure 6c. It is worth noting that the measurements from all the MAG sensors were adjusted by subtracting the daily average, except for the MR measurement. Spike-like disturbances are observed just before and after the step-like disturbance in the measurements obtained from all the MAG sensors. The spike-like disturbances have a shorter interval of ~2 min compared to the step-like disturbances. However, since the MR sensor measurement was averaged in the preprocessing, the spike-like disturbance is not presented in the MR sensor measurement. For this reason, the MR sensor measurement is useful for the removal of the step-like disturbance only.
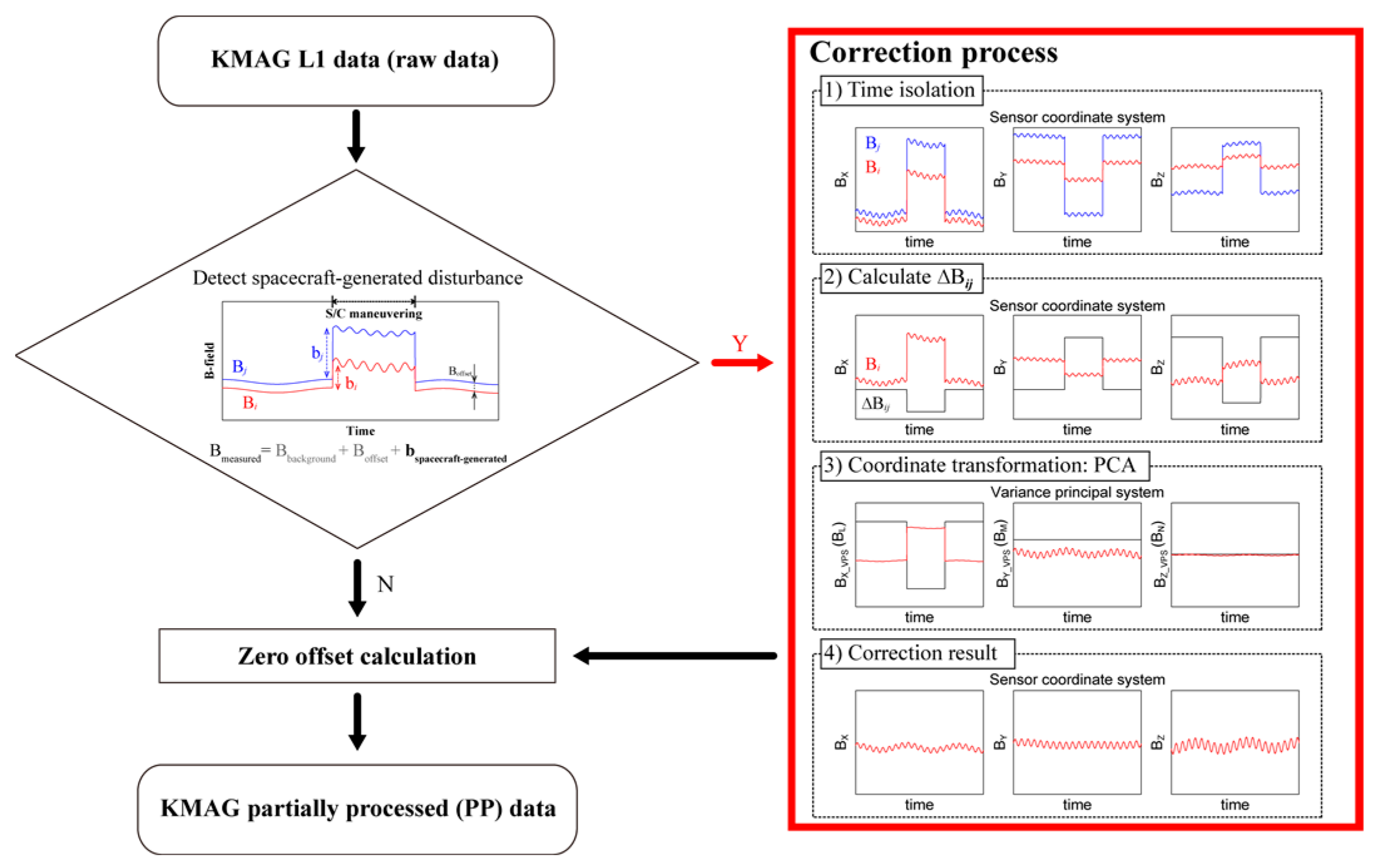
Therefore, our strategy is to preferentially eliminate the step-like disturbance from the data from each MAG by using the MR measurements, and then remove the spike disturbance using only the MAG data. The time interval for the disturbance elimination is selected from 04:30 UT to 06:00 UT to isolate the targeted step-like disturbance. Using the gradiometer technique mentioned in
Section 3.1, we determined the direction for the maximum variance to find the scaling factor and the rotation matrix. To compare the most evident difference from the magnetic source inside the spacecraft body, we used the data from the inboard sensor and the outmost sensor on the spacecraft, MR and MAG1.
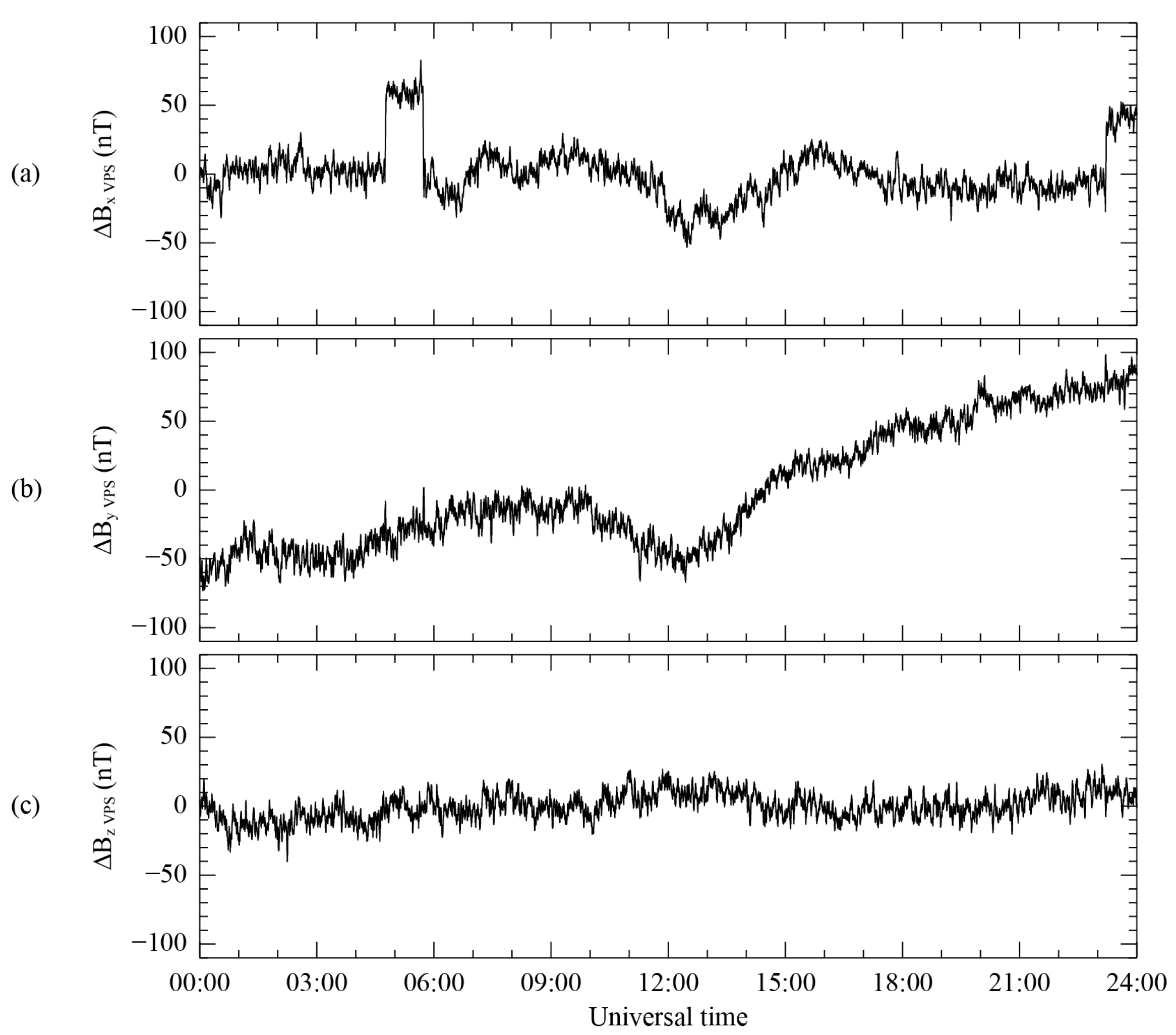
As shown in
Figure 7, the step-like disturbance was extracted using the difference Δ
B0,ij between the MAG1 and MR sensors for each component in the VPS coordinate system, using the PCA method. Specifically,
Figure 6a–c shows these components, which were rotated to align with the directions of maximum, intermediate, and minimum variance. These components correspond to the LMN coordinate components explained in
Section 3.1. In
Figure 7a, the step-like disturbance is also extracted for the selected time interval and the second disturbance after 23:00 UT. The extraction of both step-like disturbances related to the maximum variance components at the same time implies that both disturbances can be eliminated in the first-order correction process, simultaneously.
Figure 7b shows the largest change of ΔB
Y, by ~140 nT across all time periods, while
Figure 6a shows that ΔB
X changes by ~90 nT over the entire period of the data. However, it is important to note that the variance direction is determined based on the difference values of ΔB
X ~65 nT, ΔB
Y ~40 nT, and ΔB
Z ~20 nT for the isolated time interval. In other words, the rotation matrix used to transform to the VPS coordinates only reflects these difference values in the isolated time range.
Figure 7c shows the minimum variation in the same interval, representing the minimum variance direction. Since the MR measurement initially includes high-frequency noise, the result obtained by subtracting both sensor measurements reflects this noise for all the components, as demonstrated in
Figure 7a–c. However, in the first-order correction process, the high-frequency noise can be ignored due to the significantly more significant variance in the step-like disturbance.
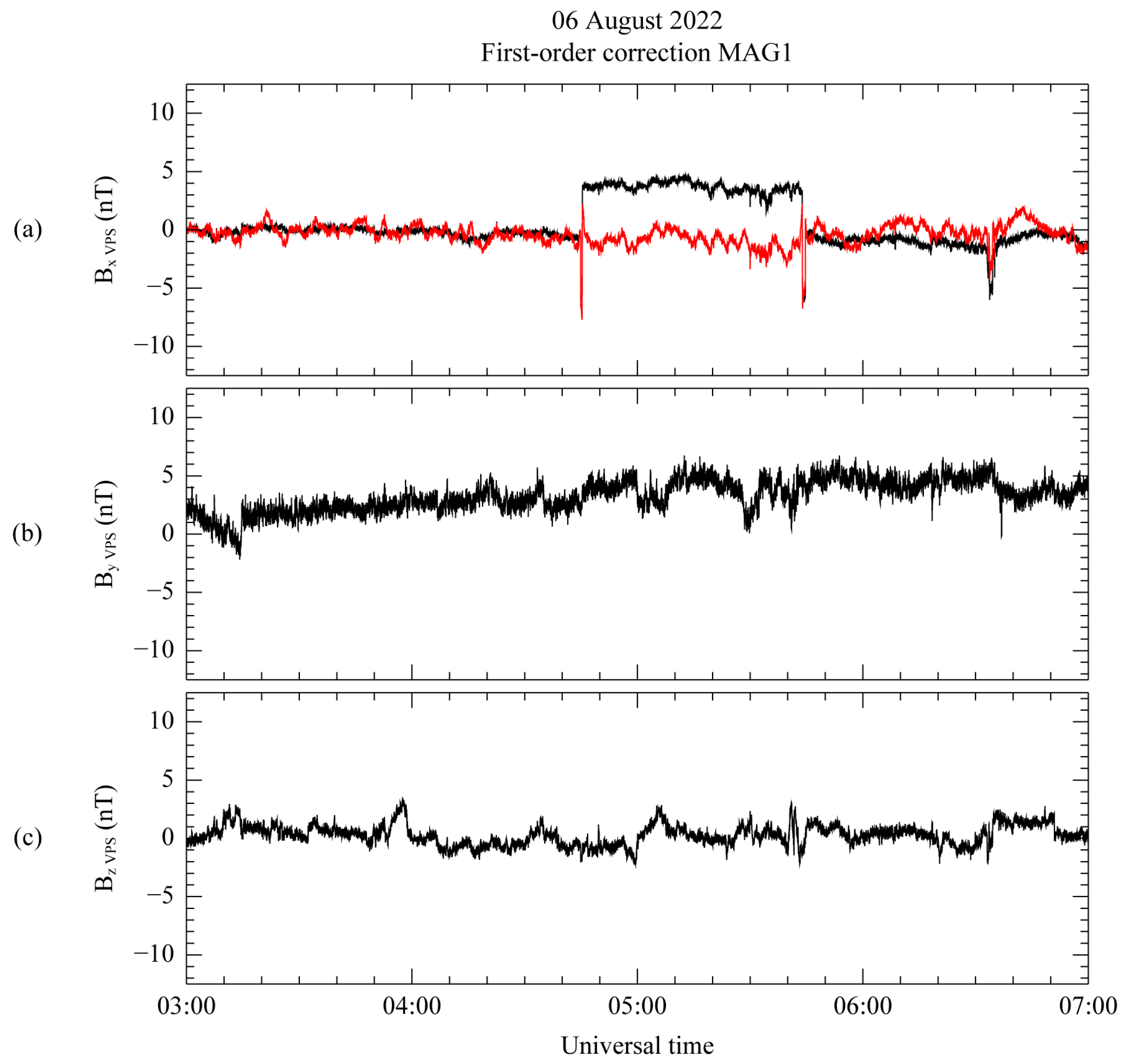
The initial measurement and the first-order corrected results are shown using the initial VPS coordinate system in
Figure 8, as black and red lines, respectively, with the mean value subtracted. In
Figure 8a, the targeted step-like disturbance occurring between 04:45 and 05:44 UT is successfully eliminated in the maximum variance direction, while the spike-like disturbance still persists. In addition, despite the correction process, the corrected result after 05:44 UT differs from the uncorrected measurement. According to Constantinescu et al. [
12], this discrepancy arises because spacecraft-generated disturbances continue to affect the magnetic field measurements, even after the maneuver has concluded. In accordance with Equations (6)–(8), it is important to note that the intermediate and minimum variance direction components in
Figure 8b,c do not influence this correction step.
Figure 9 shows a spike-like disturbance still present in the first-order corrected results of the measurements from the three MAG sensors. We selected an isolated time range of 6 min from 04:42 to 04:48 UT to decouple the spike-like disturbances after the first-order correction. The disturbance in this period, shown in
Figure 9, corresponds to the spike just before the step-like disturbance. The spike-like disturbance in relation to the Bx components using the VPS coordinates, which is the same as the B
L component in
Section 3, is extracted from the first-order corrected results of the three MAG sensors using the calculated rotation matrix, as depicted in
Figure 9a. The minimum peak magnitude of each disturbance on the Bx component is −7.5 nT for MAG1, −9.8 nT for MAG2, and −13.8 nT for MAG3. Similar to the case of the step-like disturbance, this result also indicates that the magnitude of these disturbances is well suited to the differences in the distance between the magnetometers. On the other hand, the other components in
Figure 9b,c show only high-frequency noise initially included in the measurement. The high-frequency noise tends to have a larger amplitude in the MAG3 measurement than for MAG1 and MAG2. This tendency for noise is also shown in
Figure 9a. Therefore, we can expect that the different amplitudes of high-frequency noise affect the results after the second-order correction, according to Equations (6)–(8), when we use only the MAG sensors to conduct the second-order correction.
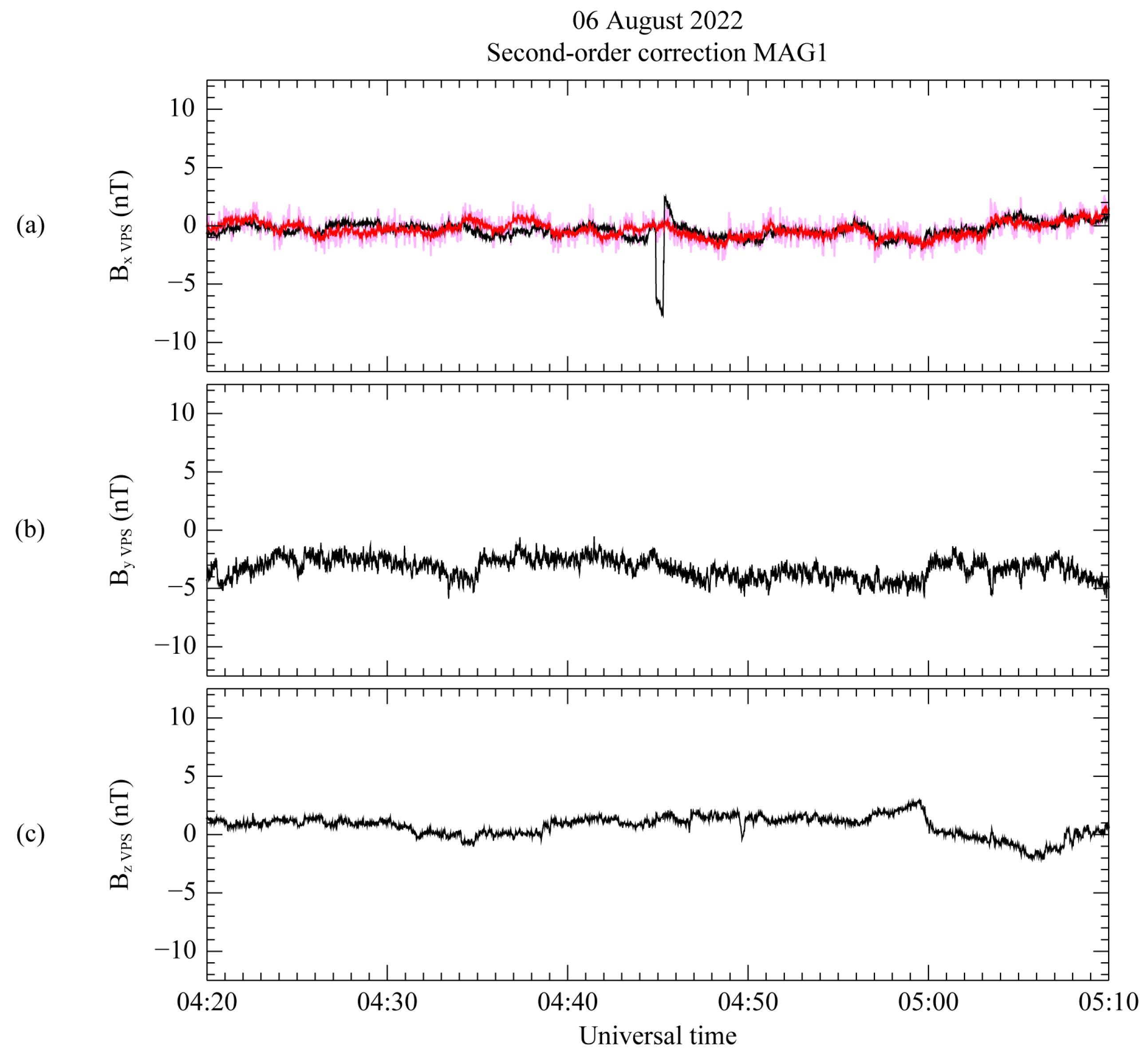
In the second-order correction, the initially corrected results are adjusted by the maximum variance direction to extract the spike-like disturbance. Since the MR sensor cannot measure spike-like disturbances, the measurement from the MAG3 sensor is used to eliminate the disturbance. The MAG3 sensor is located farthest from the MAG1 sensor. The second-order correction result for the MAG1 measurement over the remaining spike-like disturbance is plotted in
Figure 10. In the VPS coordinate system for the first-order correction result, the first-order and second-order correction results are depicted as black and red lines, respectively, using the same format as
Figure 8. As in the case of
Figure 8, the second-order correction is conducted only for the component in the maximum variance direction. In addition, although there are two spike-like disturbances just before and after the step-like disturbance, we perform the correction for the preferentially observed spike-like disturbance with time as a target. In
Figure 10a, the second-order correction process eliminates the targeted spike-like disturbance from 04:44 to 04:47 UT, along the maximum variance direction. However, the initial result, as indicated by the magenta line, exhibits a broader range of variation compared to the first-order corrected result. The initial outcome for the second-order correction displays an amplitude change of up to ~2 nT as high-frequency noise, surpassing the variation observed in the first-order corrected result. This high-frequency noise can be considered an artificial outcome that occurs during the correction process, and it is mitigated according to the method outlined in
Section 3.2. Based on the calculations using Equation (12), the ratio of the standard deviation for the first-order and initial second-order correction measurements was determined. The calculation was carried out for the period without spacecraft-generated disturbance, corresponding to the time interval from 00:00 UT to 04:00 UT and from 08:00 UT to 21:00 UT. The calculated ratio is approximately 0.32. The red line illustrates the final result, which mitigates high-frequency noise by multiplying the initial correction result by the calculated ratio.
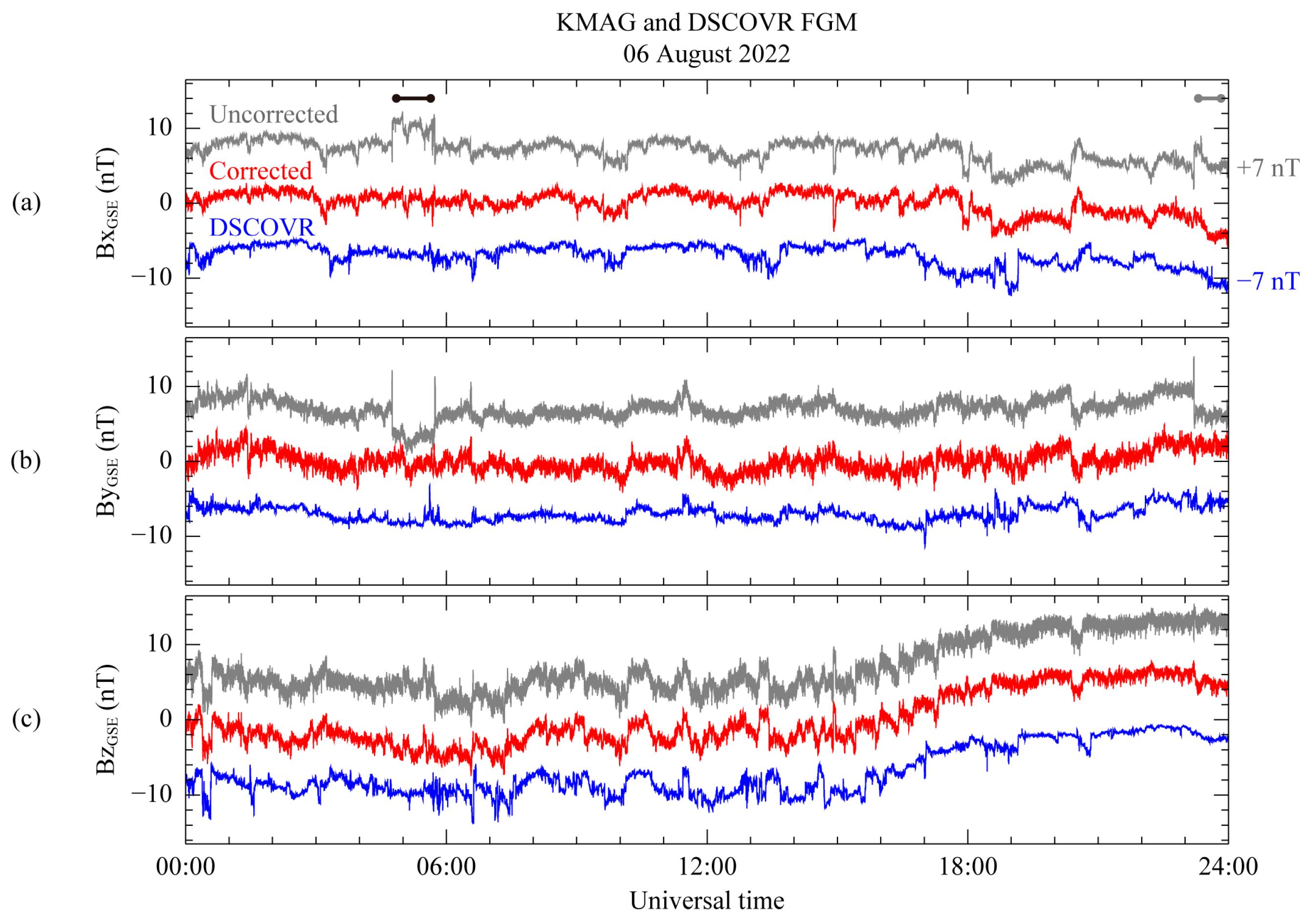
Figure 11 shows the DSCOVR FGM measurement and the corrected MAG1 measurement using the GSE coordinate system. Both measurements are subtracted from their daily average. To compare the two measurements, the DSCOVR magnetic field data was time shifted by 40 min over the KMAG observation. The time shift was determined by identifying the peaks in the magnetic field data collected by the two spacecraft over 4 h starting at 10:00 UT. In addition, +7 nT and −7 nT are, respectively, added to the uncorrected KMAG data and the DSCOVR FGM data in each panel, to compare with the corrected magnetic field data. On the B
X and B
Y components in
Figure 11a,b, indicated by a black bar, the step-like disturbance from 04:44 to 05:44 UT for the raw measurements (gray) is successfully eliminated in the corrected data (red). Although the scaling matrix
A0,ij in Equation (10) is applied over all the time ranges, only the disturbance is clearly removed. In addition, another step-like disturbance exists from 23:20 UT, indicated by a gray bar. This disturbance is removed after the correction process. Considering the switching-on signal for the VDE and the magnetic field components B
Y and B
Z related to the disturbance in
Figure 2, it can be seen that the two disturbances under the black and gray bars share the same generating source. For this reason, even if the scaling matrix is only calculated for the time range indicated by the black bar, the matrix can eliminate the disturbance for the time range of the gray bar at the same time. As a result,
Figure 11 shows good agreement between the DSCOVR and KMAG observations.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}