
Reliable Denoising Strategy to Enhance the Accuracy of Arrival Time Picking of Noisy Microseismic Recordings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
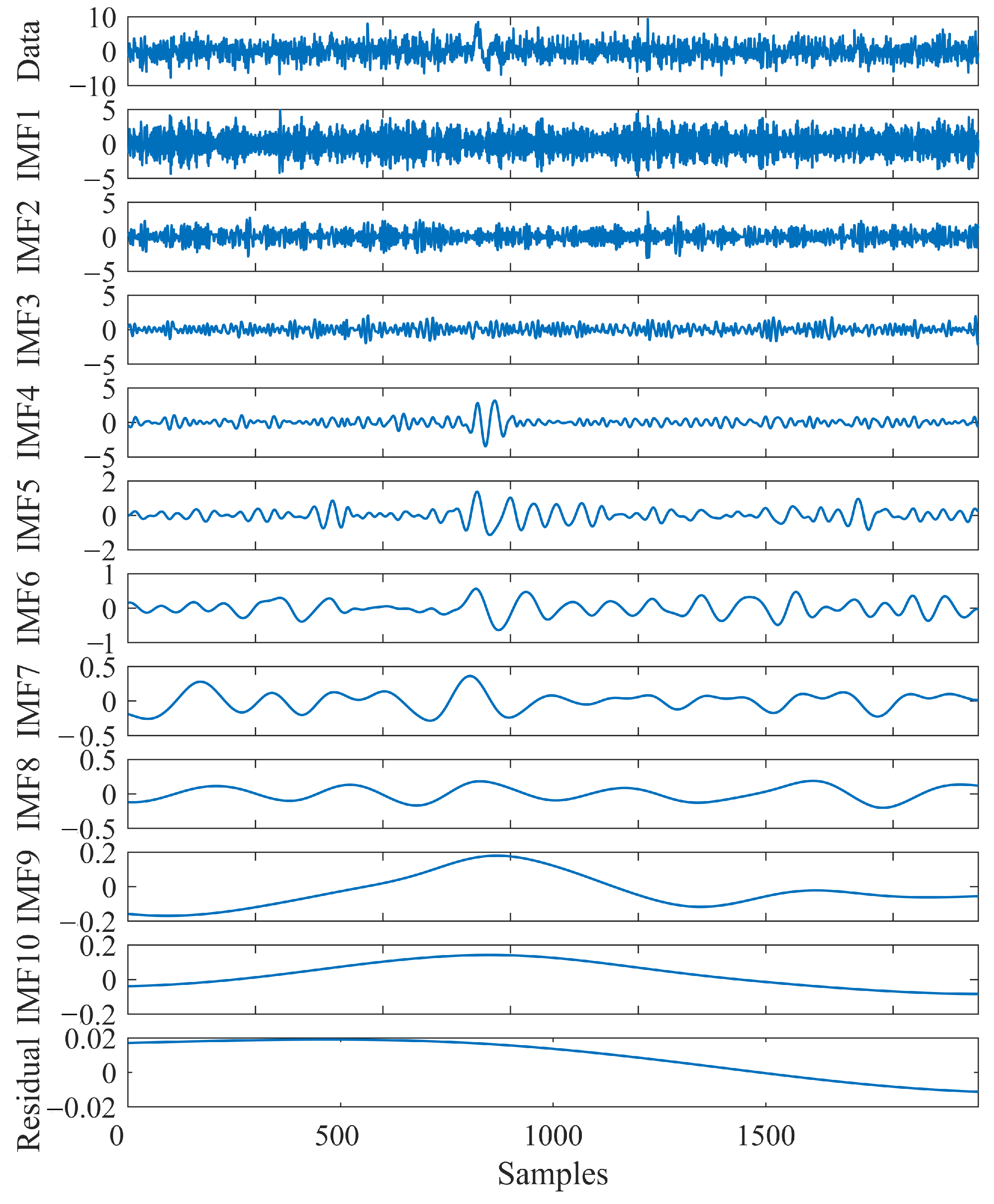
2.1. Ensemble Empirical Mode Decomposition
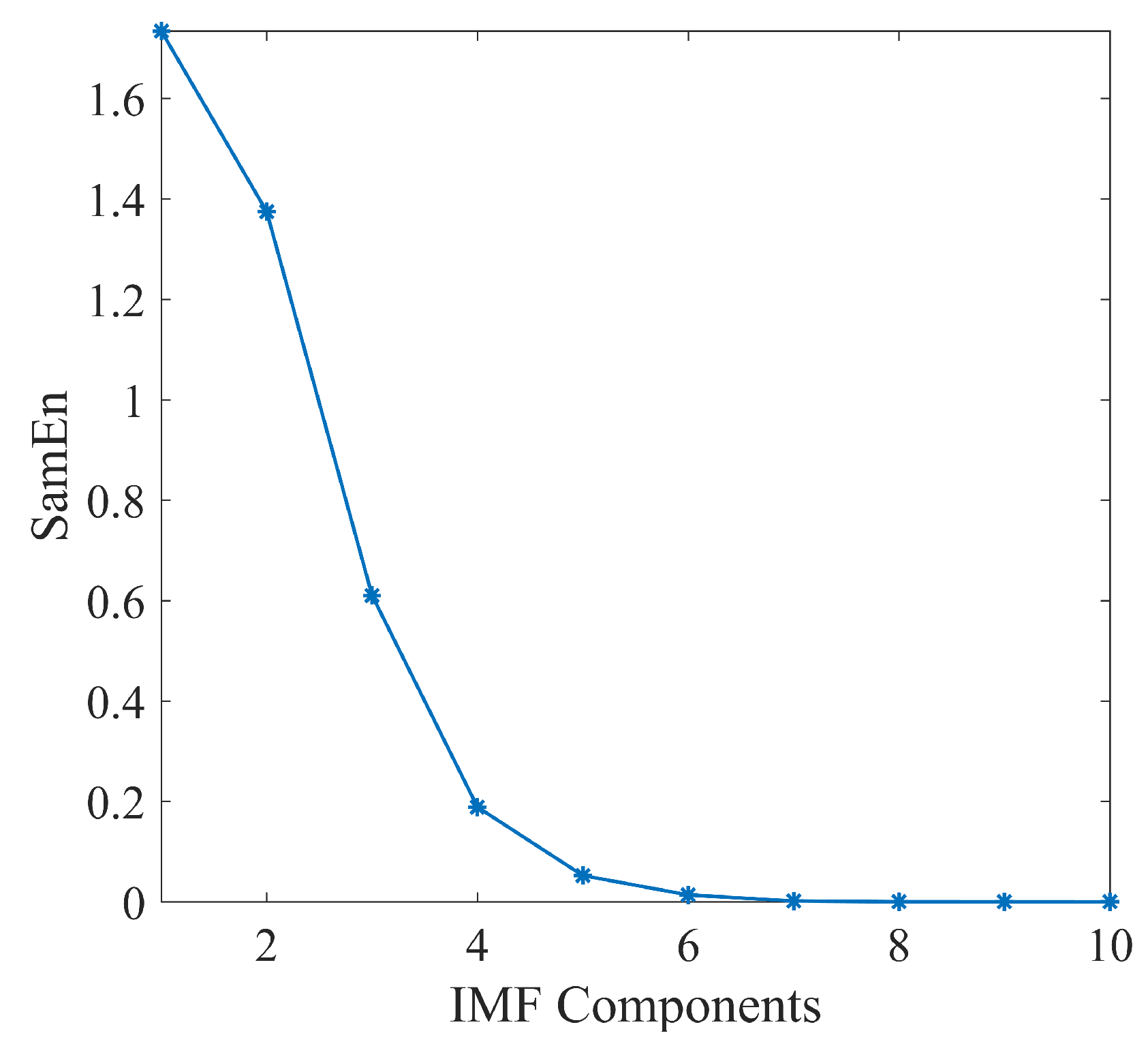
2.2. Sample Entropy
2.3. Microseismic Signal Extraction
3. The Improved Picking Algorithm
4. Results and Discussion
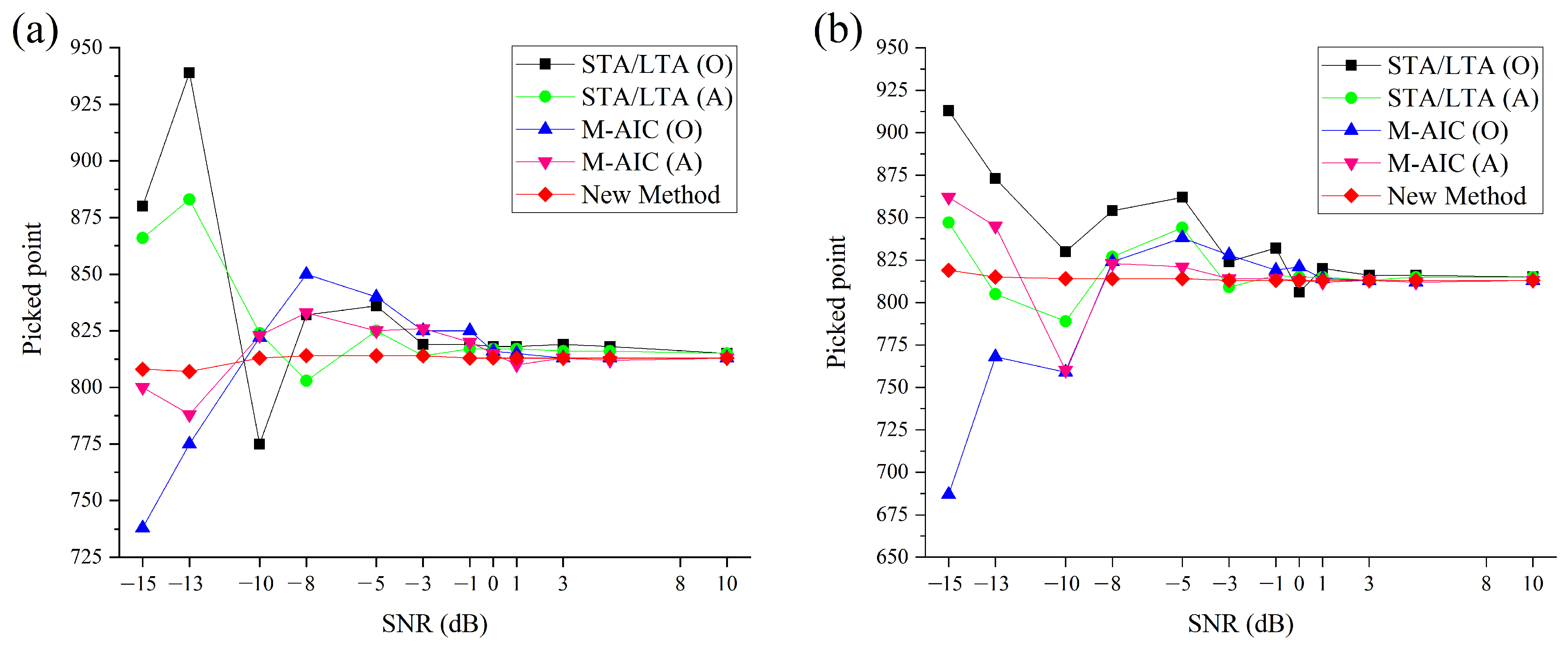
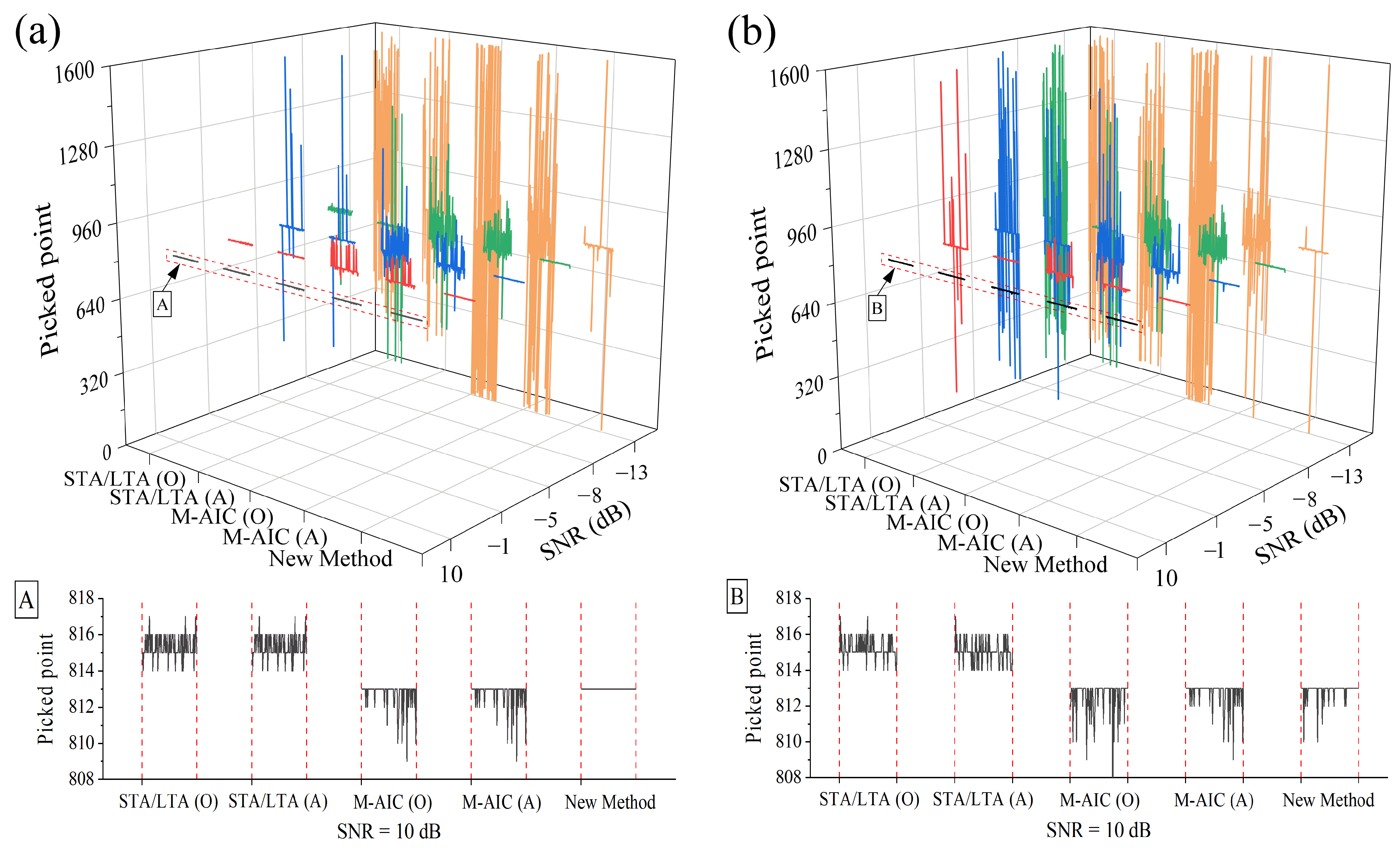
4.1. Picking Results Comparison of Different Approaches Using Synthetic Microseismic Recordings
4.2. Application on Real Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, S.; Li, J.; Tang, L.; Zhang, L. Microseismic monitoring and experimental study on rockburst in water-rich area of tunnel. Tunn. Undergr. Space Technol. 2023, 141, 105366. [Google Scholar] [CrossRef]
- He, J.; Li, H.; Tuo, X.; Wen, X.; Feng, L. A Reliable Online Dictionary Learning Denoising Strategy for Noisy Microseismic Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5904910. [Google Scholar] [CrossRef]
- Dong, L.; Zhu, H.; Yan, F.; Bi, S. Risk field of rock instability using microseismic monitoring data in deep mining. Sensors 2023, 23, 1300. [Google Scholar] [CrossRef]
- Saad, O.M.; Shalaby, A.; Samy, L.; Sayed, M.S. Automatic arrival time detection for earthquakes based on Modified Laplacian of Gaussian filter. Comput. Geosci. 2018, 113, 43–53. [Google Scholar] [CrossRef]
- Li, H.; Tuo, X.; Shen, T.; Wang, R.; Courtois, J.; Yan, M. A new first break picking for three-component VSP data using gesture sensor and polarization analysis. Sensors 2017, 17, 2150. [Google Scholar] [CrossRef]
- Long, Y.; Lin, J.; Li, B.; Wang, H.; Chen, Z. Fast-AIC Method for Automatic First Arrivals Picking of Microseismic Event With Multitrace Energy Stacking Envelope Summation. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1832–1836. [Google Scholar] [CrossRef]
- Maeda, N. A method for reading and checking phase times in autoprocessing system of seismic wave data. Zisin 1985, 38, 365–379. [Google Scholar] [CrossRef]
- Akaike, H. Autoregressive model fitting for control. Ann. Inst. Stat. Math. 1971, 23, 163–180. [Google Scholar] [CrossRef]
- Akaike, H. Markovian representation of stochastic processes and its application to the analysis of autoregressive moving average processes. Ann. Inst. Stat. Math. 1974, 26, 363–387. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Han, L.; Wong, J.; Bancroft, J. Time picking and random noise reduction on microseismic data. CREWES Res. Rep. 2009, 21, 1–13. [Google Scholar]
- Wu, H.; Zhang, B.; Li, F.; Liu, N. Semiautomatic first-arrival picking of microseismic events by using the pixel-wise convolutional image segmentation method. Geophysics 2019, 84, V143–V155. [Google Scholar] [CrossRef]
- Bao, Y.; Jia, J. Improved time-of-flight estimation method for acoustic tomography system. IEEE Trans. Instrum. Meas. 2019, 69, 974–984. [Google Scholar] [CrossRef]
- Coppens, F. First arrival picking on common-offset trace collections for automatic estimation of static corrections. Geophys. Prospect. 1985, 33, 1212–1231. [Google Scholar] [CrossRef]
- Küperkoch, L.; Meier, T.; Lee, J.; Friederich, W.; Group, E.W. Automated determination of P-phase arrival times at regional and local distances using higher order statistics. Geophys. J. Int. 2010, 181, 1159–1170. [Google Scholar] [CrossRef]
- Shang, X.; Li, X.; Morales-Esteban, A.; Dong, L. An improved p-phase arrival picking method S/LKA with an application to the Yongshaba mine in China. Pure Appl. Geophys. 2018, 175, 2121–2139. [Google Scholar] [CrossRef]
- Kalkan, E. An automatic P-phase arrival-time picker. Bull. Seismol. Soc. Am. 2016, 106, 971–986. [Google Scholar] [CrossRef]
- Ross, Z.E.; Ben-Zion, Y. Automatic picking of direct P, S seismic phases and fault zone head waves. Geophys. J. Int. 2014, 199, 368–381. [Google Scholar] [CrossRef]
- Li, H.; Tuo, X.; Wang, R.; Courtois, J. A Reliable Strategy for Improving Automatic First-Arrival Picking of High-Noise Three-Component Microseismic Data. Seismol. Res. Lett. 2019, 90, 1336–1345. [Google Scholar] [CrossRef]
- Gaci, S. The use of wavelet-based denoising techniques to enhance the first-arrival picking on seismic traces. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4558–4563. [Google Scholar] [CrossRef]
- Tsai, K.C.; Hu, W.; Wu, X.; Chen, J.; Han, Z. Automatic First Arrival Picking via Deep Learning With Human Interactive Learning. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1380–1391. [Google Scholar] [CrossRef]
- Ross, Z.E.; Meier, M.A.; Hauksson, E. P wave arrival picking and first-motion polarity determination with deep learning. J. Geophys. Res. Solid Earth 2018, 123, 5120–5129. [Google Scholar] [CrossRef]
- Guo, C.; Zhu, T.; Gao, Y.; Wu, S.; Sun, J. AEnet: Automatic picking of P-wave first arrivals using deep learning. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5293–5303. [Google Scholar] [CrossRef]
- Bose, S.; De, A.; Chakrabarti, I. Area-delay-power efficient VLSI architecture of FIR filter for processing seismic signal. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3451–3455. [Google Scholar] [CrossRef]
- Suman, S.; Kumar, A.; Singh, G.K. A new method for higher-order linear phase FIR digital filter using shifted Chebyshev polynomials. Signal Image Video Process. 2016, 10, 1041–1048. [Google Scholar] [CrossRef]
- Nasr, M.; Giroux, B.; Dupuis, J.C. A novel time-domain polarization filter based on a correlation matrix analysis. Geophysics 2021, 86, V91–V106. [Google Scholar] [CrossRef]
- Li, L.; Li, H.; Tuo, X.; Yang, Z.; Rong, W. A Novel Polarization Estimation Method for Seismic Recordings. Seismol. Soc. Am. 2023, 94, 1957–1967. [Google Scholar] [CrossRef]
- Li, H.; Shi, J.; Li, L.; Tuo, X.; Qu, K.; Rong, W. Novel wavelet threshold denoising method to highlight the first break of noisy microseismic recordings. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5910110. [Google Scholar] [CrossRef]
- Du, C.; Yu, S.; Yin, H.; Sun, Z. Microseismic time delay estimation method based on continuous wavelet. Sensors 2022, 22, 2845. [Google Scholar] [CrossRef]
- Zhang, C.; van der Baan, M. Microseismic denoising and reconstruction by unsupervised machine learning. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1114–1118. [Google Scholar] [CrossRef]
- Chen, Y.; Saad, O.M.; Savvaidis, A.; Chen, Y.; Fomel, S. 3D microseismic monitoring using machine learning. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023842. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Beroza, G.C. Deep-learning seismology. Science 2022, 377, eabm4470. [Google Scholar] [CrossRef]
- Saad, O.M.; Bai, M.; Chen, Y. Uncovering the microseismic signals from noisy data for high-fidelity 3D source-location imaging using deep learning. Geophysics 2021, 86, KS161–KS173. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. L. Ser. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, Z. A review on Hilbert-Huang transform: Method and its applications to geophysical studies. Rev. Geophys. 2008, 46. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhong, Z.; Li, Y.; Shao, D.; Wu, Y. Ensemble empirical mode decomposition and stacking model for filtering borehole distributed acoustic sensing records. Geophysics 2023, 88, WA319–WA334. [Google Scholar] [CrossRef]
- Wang, Y.; Satake, K.; Maeda, T.; Shinohara, M.; Sakai, S. A method of real-time tsunami detection using ensemble empirical mode decomposition. Seismol. Res. Lett. 2020, 91, 2851–2861. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol.-Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Delgado-Bonal, A.; Marshak, A. Approximate entropy and sample entropy: A comprehensive tutorial. Entropy 2019, 21, 541. [Google Scholar] [CrossRef]
- Zhou, X.; Lei, W. Spatial patterns of sample entropy based on daily precipitation time series in China and their implications for land surface hydrological interactions. Int. J. Climatol. 2020, 40, 1669–1685. [Google Scholar] [CrossRef]
- Pincus, S.M.; Goldberger, A.L. Physiological time-series analysis: What does regularity quantify? Am. J. Physiol.-Heart Circ. Physiol. 1994, 266, H1643–H1656. [Google Scholar] [CrossRef] [PubMed]
- Akram, J.; Eaton, D.W. A review and appraisal of arrival-time picking methods for downhole microseismic dataArrival-time picking methods. Geophysics 2016, 81, KS71–KS91. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Q.; Liu, X.; Zhao, J.; Xu, Q.; Yang, Y.; Liu, G. Adaptive and automatic P-and S-phase pickers based on frequency spectrum variation of sliding time windows. Geophys. J. Int. 2018, 215, 2172–2182. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, H.; Rong, W. Reliable Denoising Strategy to Enhance the Accuracy of Arrival Time Picking of Noisy Microseismic Recordings. Sensors 2023, 23, 9421. https://doi.org/10.3390/s23239421
Zhang X, Li H, Rong W. Reliable Denoising Strategy to Enhance the Accuracy of Arrival Time Picking of Noisy Microseismic Recordings. Sensors. 2023; 23(23):9421. https://doi.org/10.3390/s23239421
Chicago/Turabian StyleZhang, Xiaohui, Huailiang Li, and Wenzheng Rong. 2023. "Reliable Denoising Strategy to Enhance the Accuracy of Arrival Time Picking of Noisy Microseismic Recordings" Sensors 23, no. 23: 9421. https://doi.org/10.3390/s23239421
APA StyleZhang, X., Li, H., & Rong, W. (2023). Reliable Denoising Strategy to Enhance the Accuracy of Arrival Time Picking of Noisy Microseismic Recordings. Sensors, 23(23), 9421. https://doi.org/10.3390/s23239421