Improving Indoor Pedestrian Dead Reckoning for Smartphones under Magnetic Interference Using Deep Learning

Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions and Structure
- (1)
- In this study, based on sensor data during walking, we developed a deep-learning algorithm using CNNs, aimed at extracting profound features from pedestrian movements and effectively minimizing feature redundancy.
- (2)
- Furthermore, we introduced a deep-learning model that integrates both CNNs and SVMs, tailored specifically for detecting local magnetic field disturbances during walking. In addition, we conducted a comparative analysis of the performance differences in heading estimation between standalone CNNs or SVMs and the combined CNN–SVM model proposed in this paper.
- (3)
- Depending on the presence of magnetic interference, we proposed two distinct heading fusion strategies. In environments free from local magnetic interference, we employed the UKF to merge data from gyroscopes and magnetometers. Conversely, in environments with local magnetic disturbances, we determined the final heading based on the previous moment’s ultimate heading, combined with the gyroscope’s heading data.
2. Materials and Methods
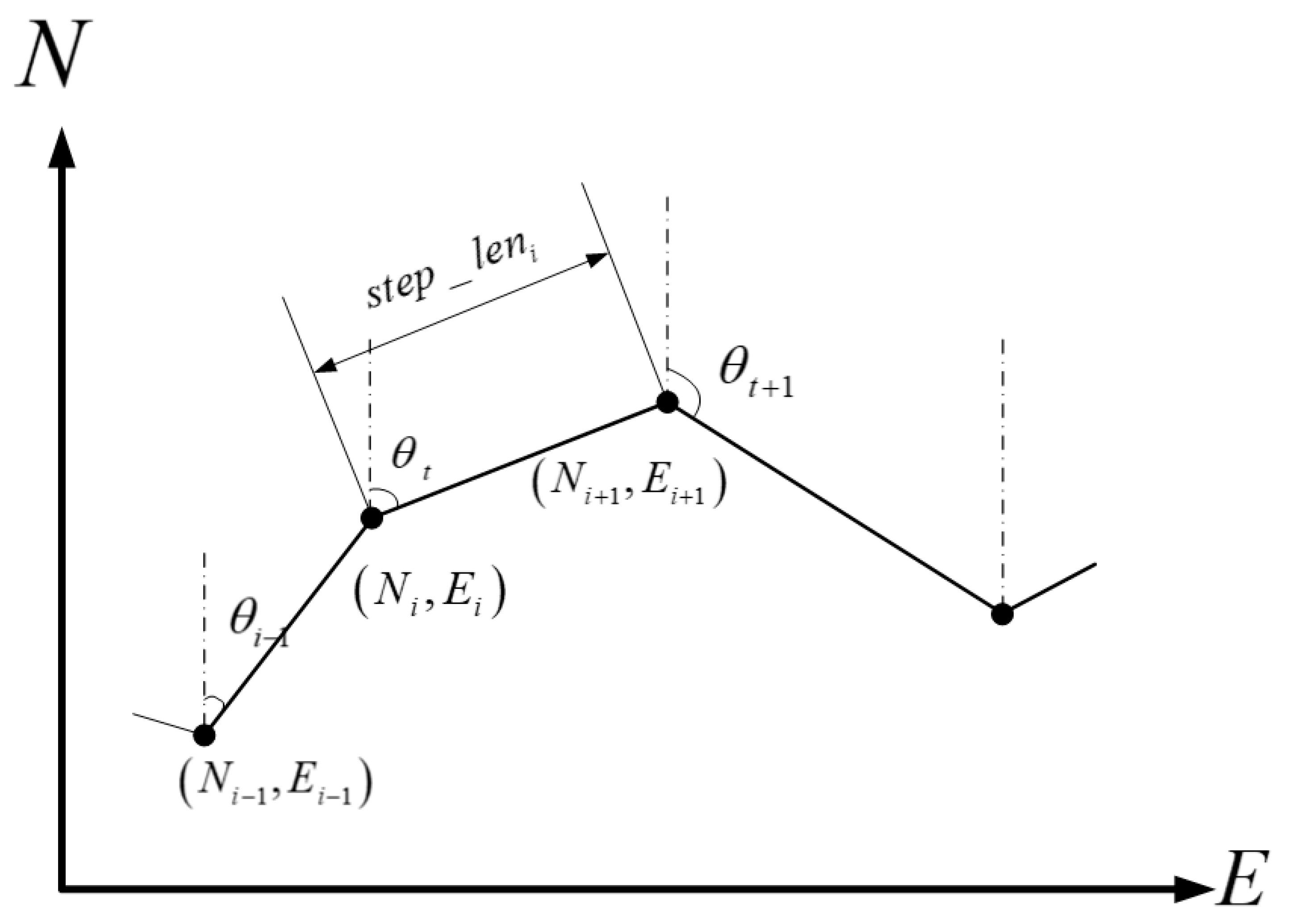
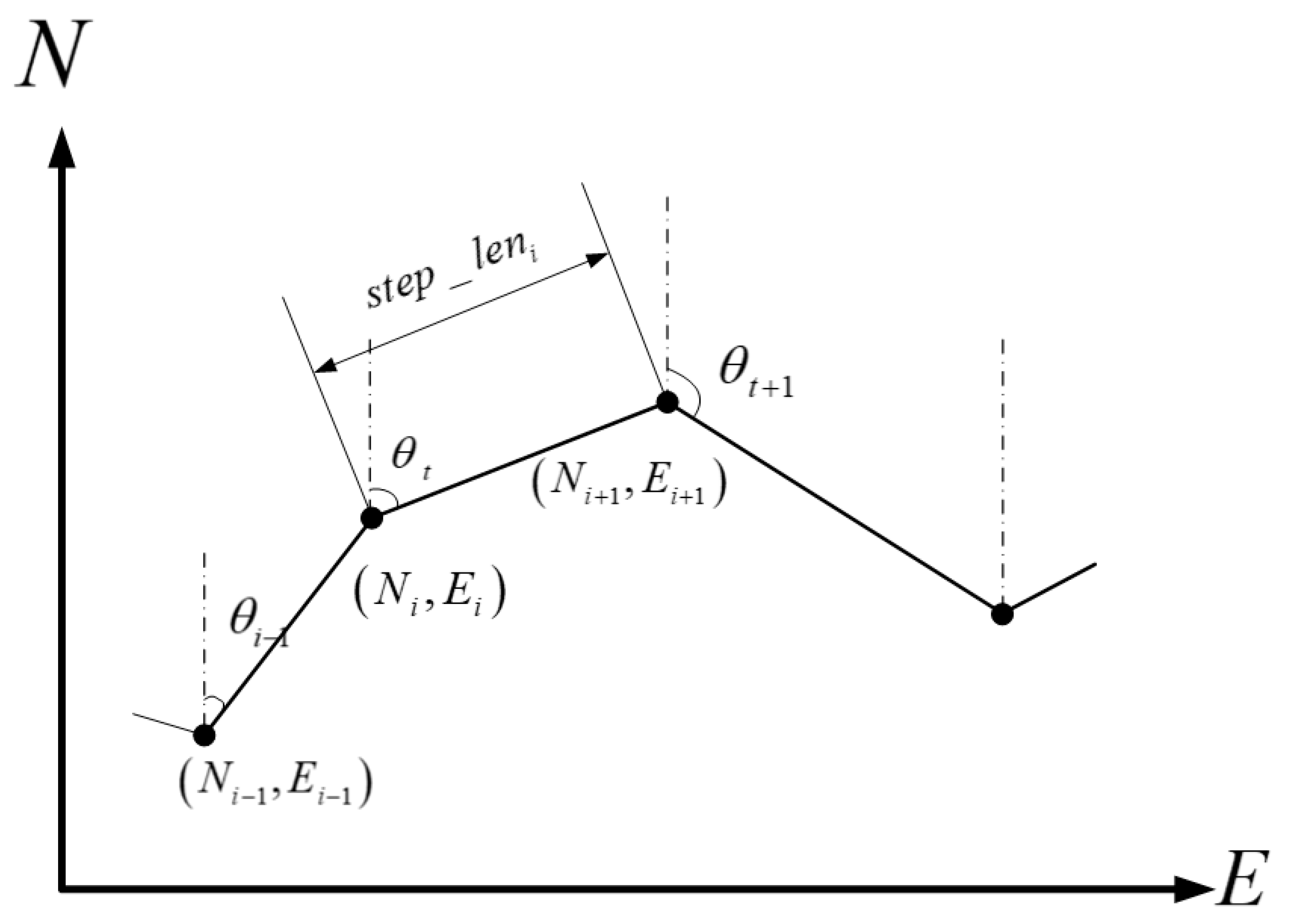
2.1. PDR Algorithm Principle
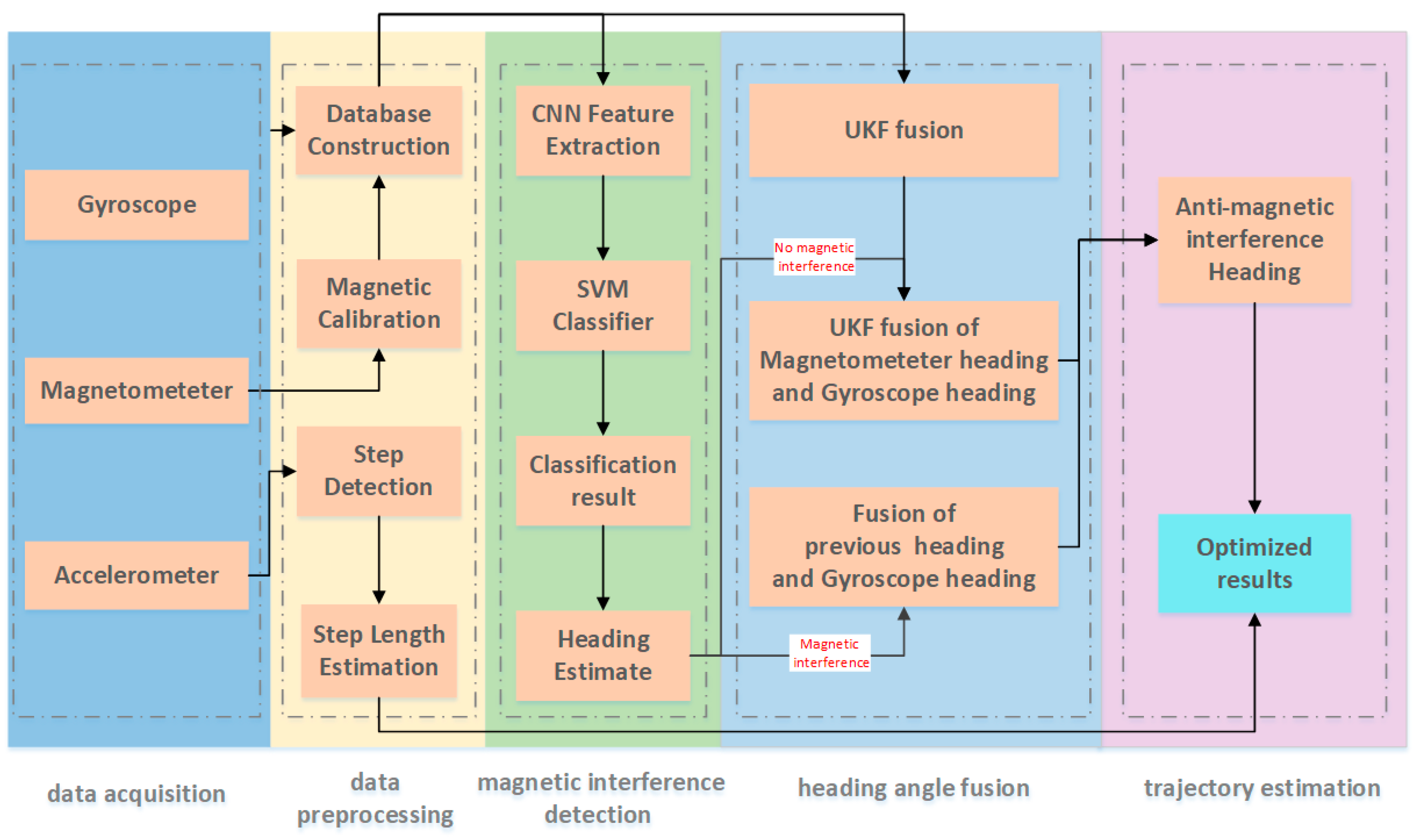
2.2. Algorithm Framework of This Study
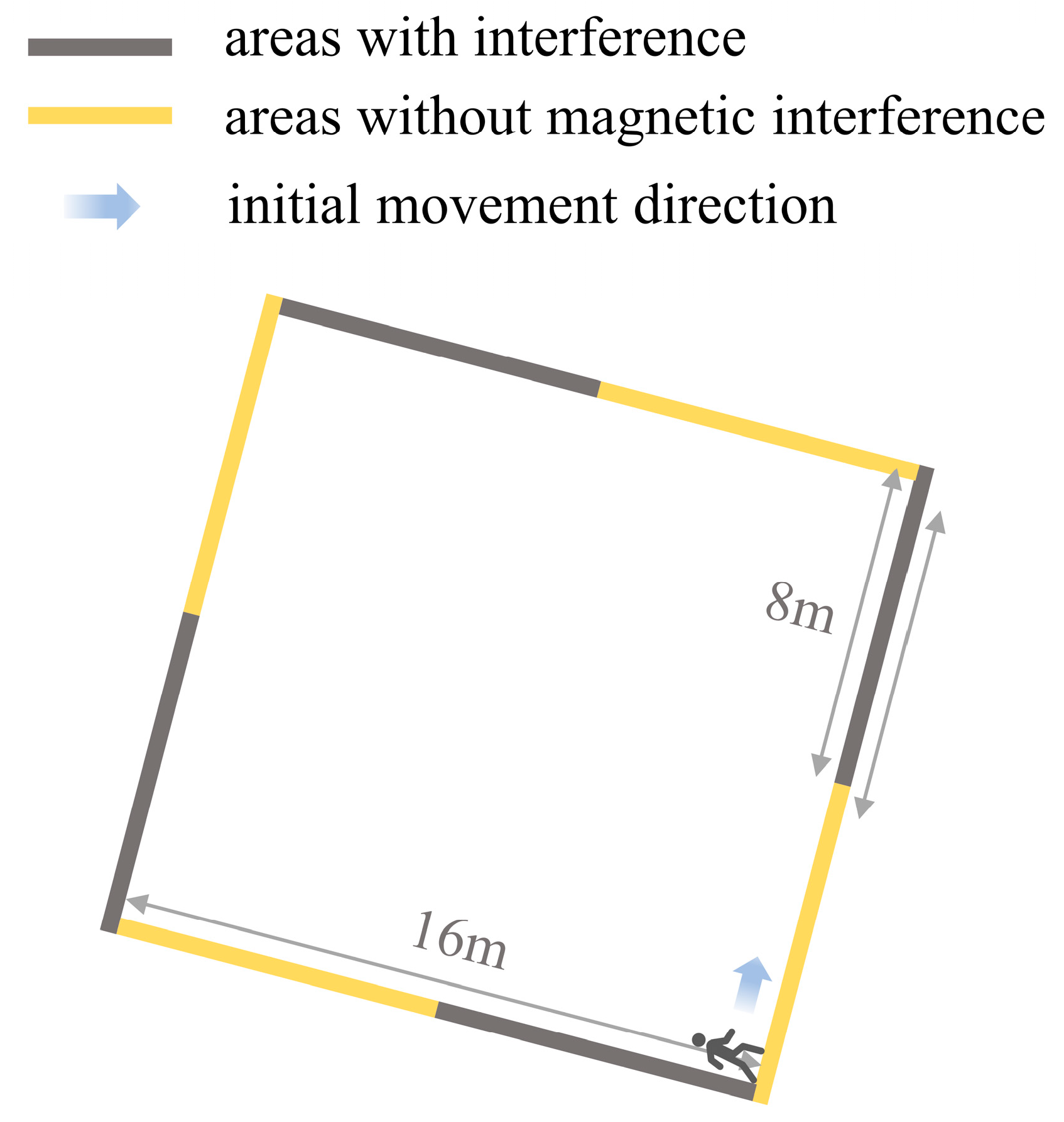
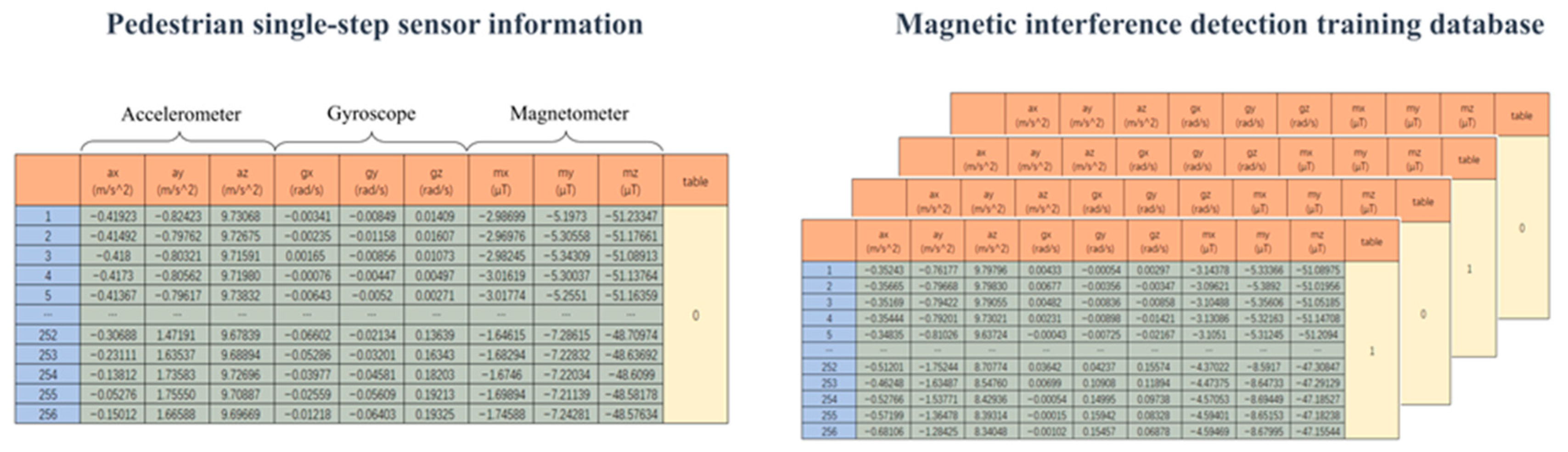
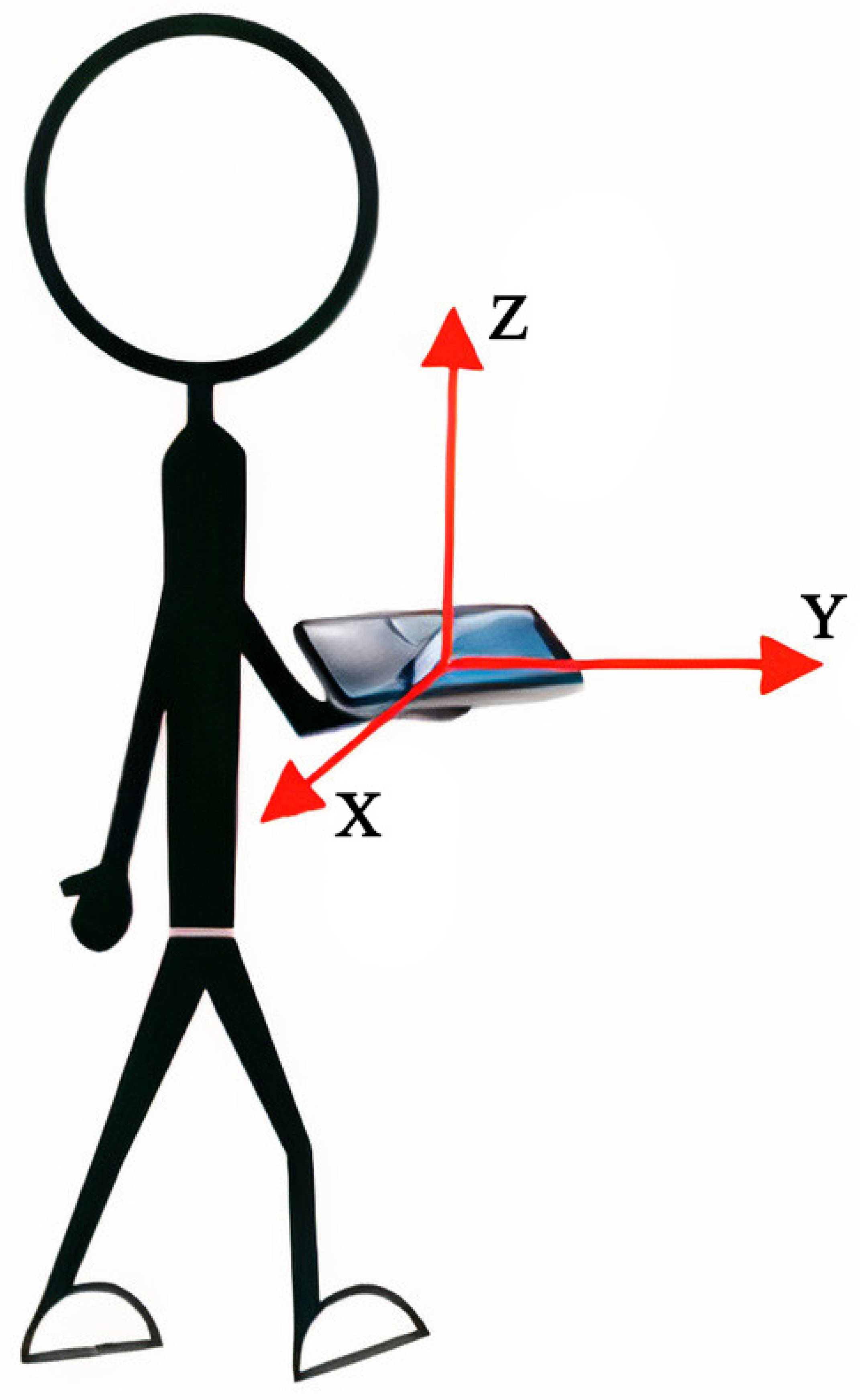
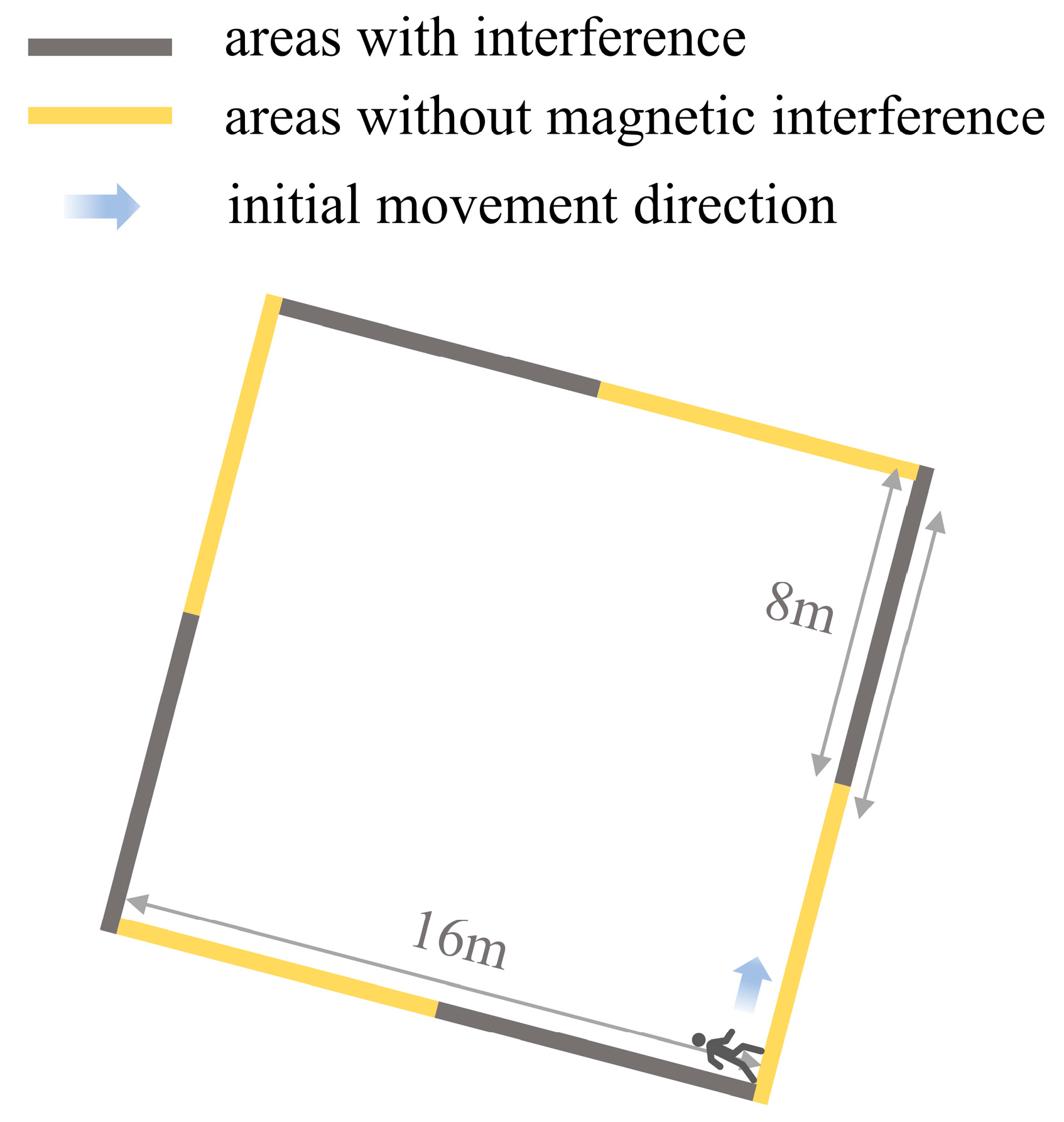
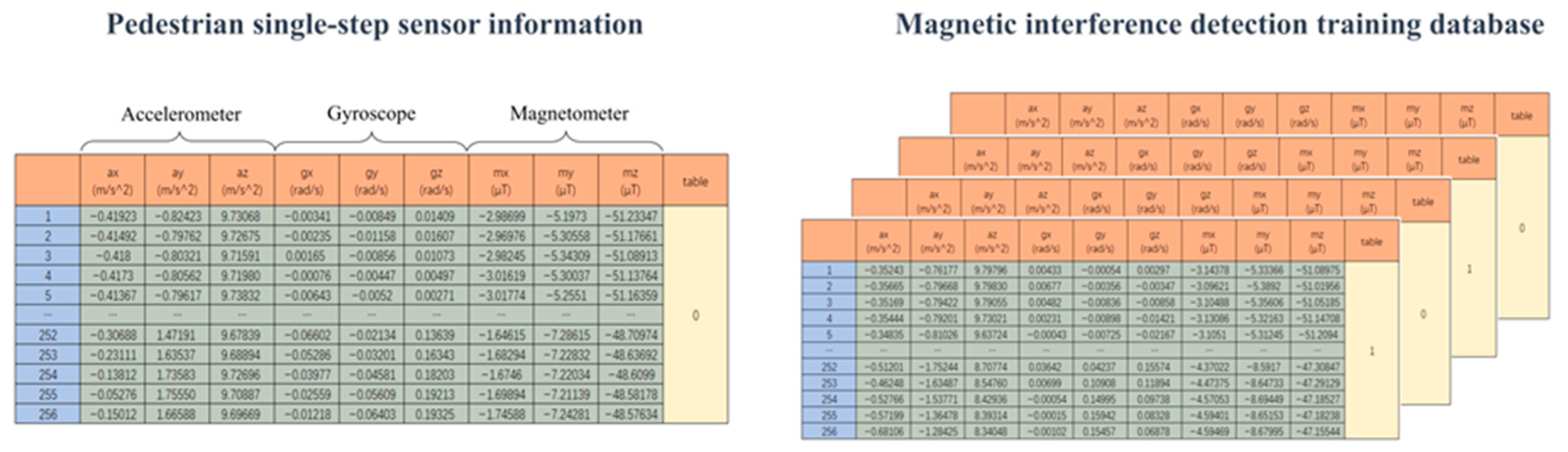
2.3. Data Collection
2.4. Data Preprocessing
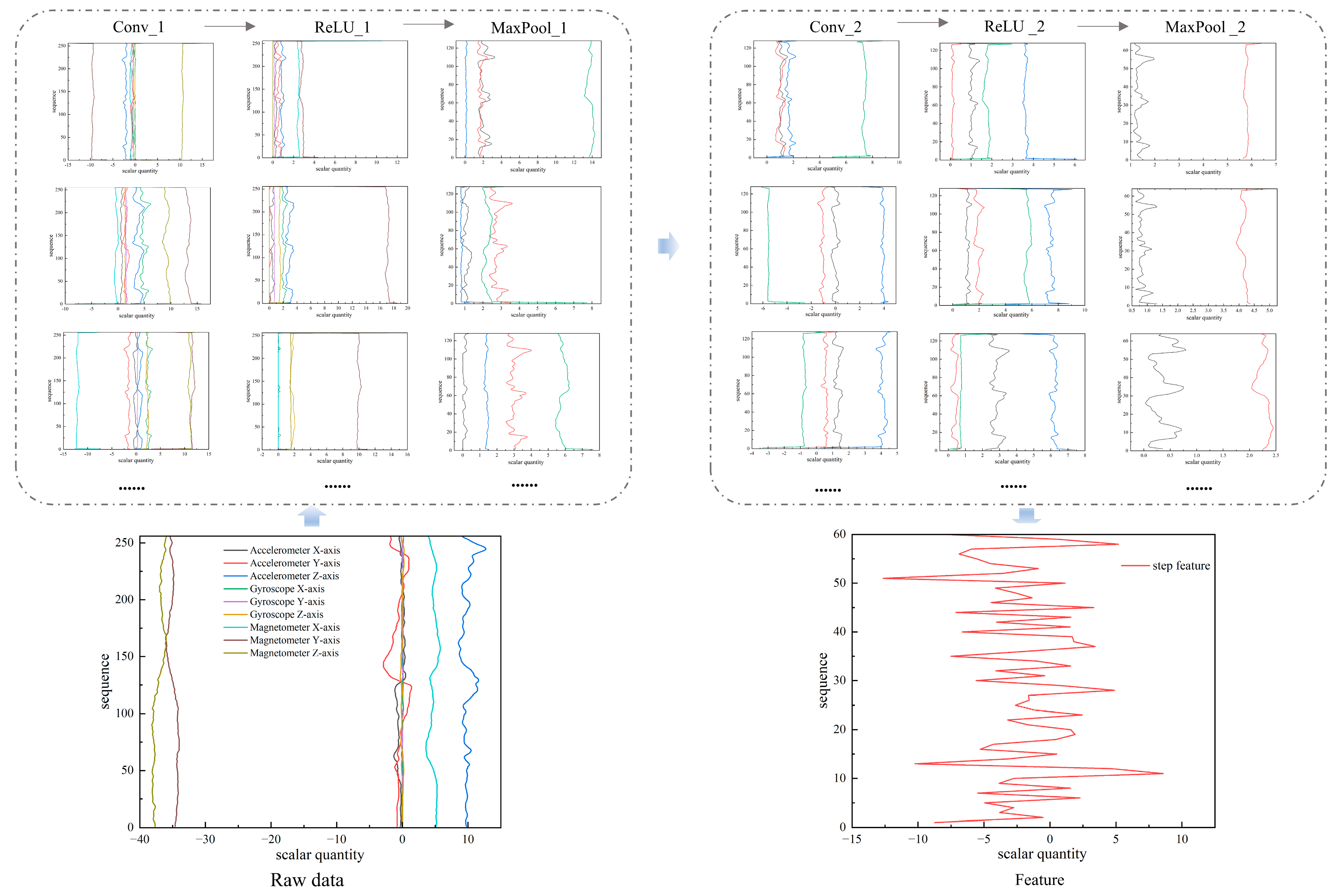
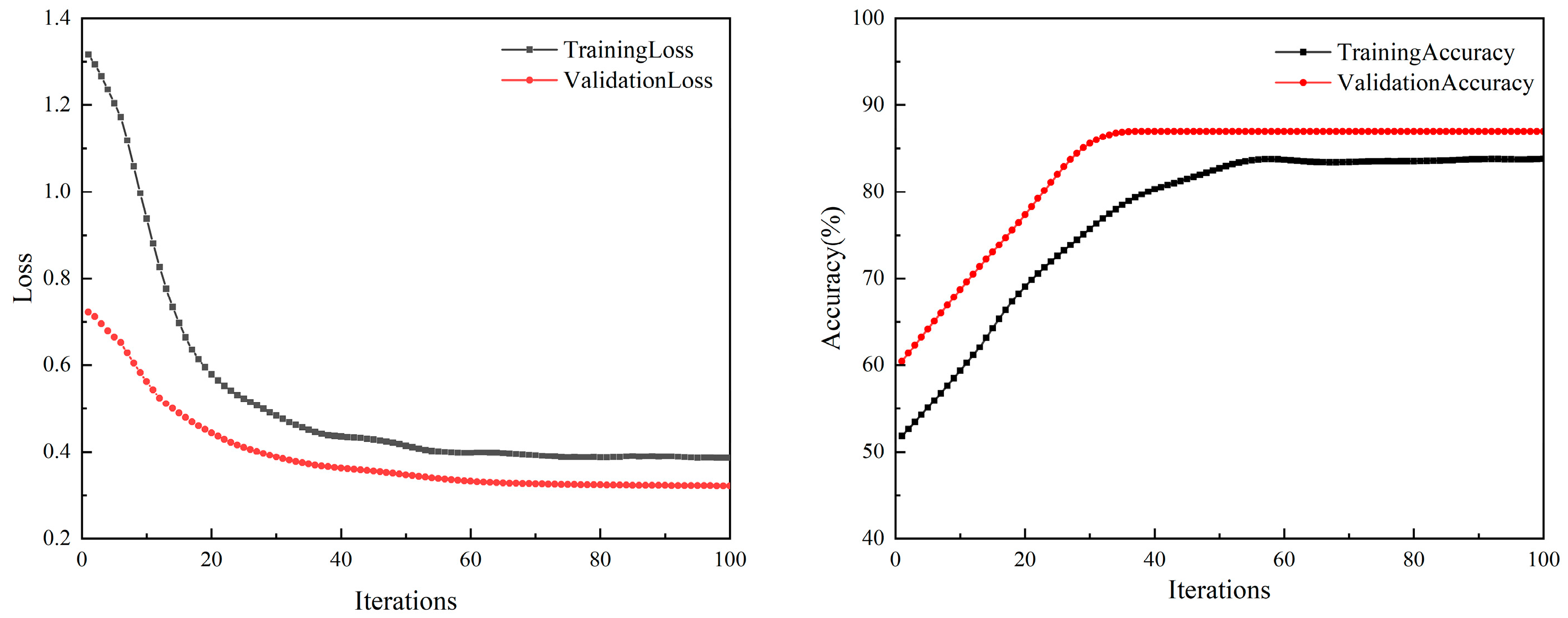
2.5. Model Construction
2.5.1. CNN Principle
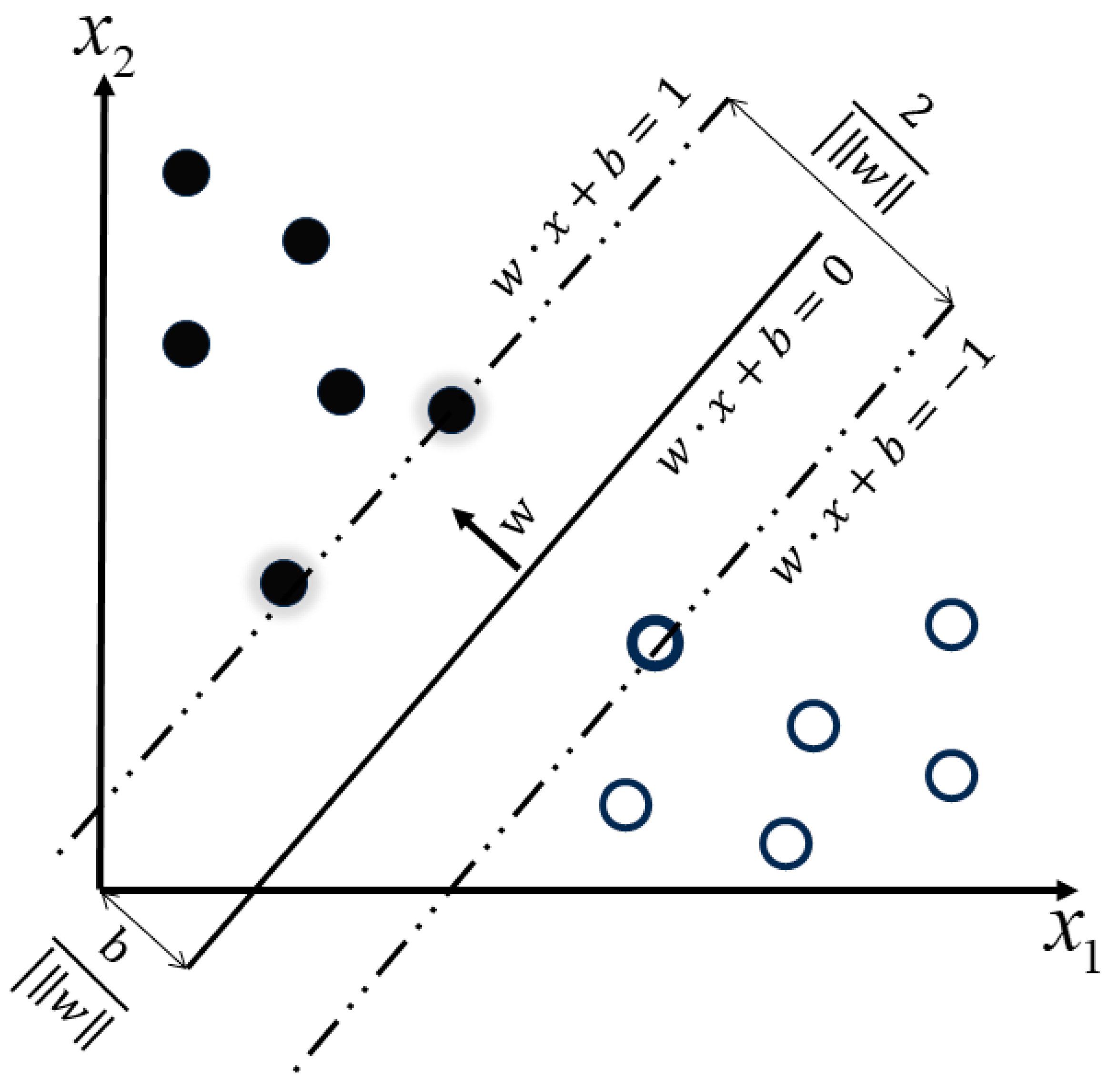
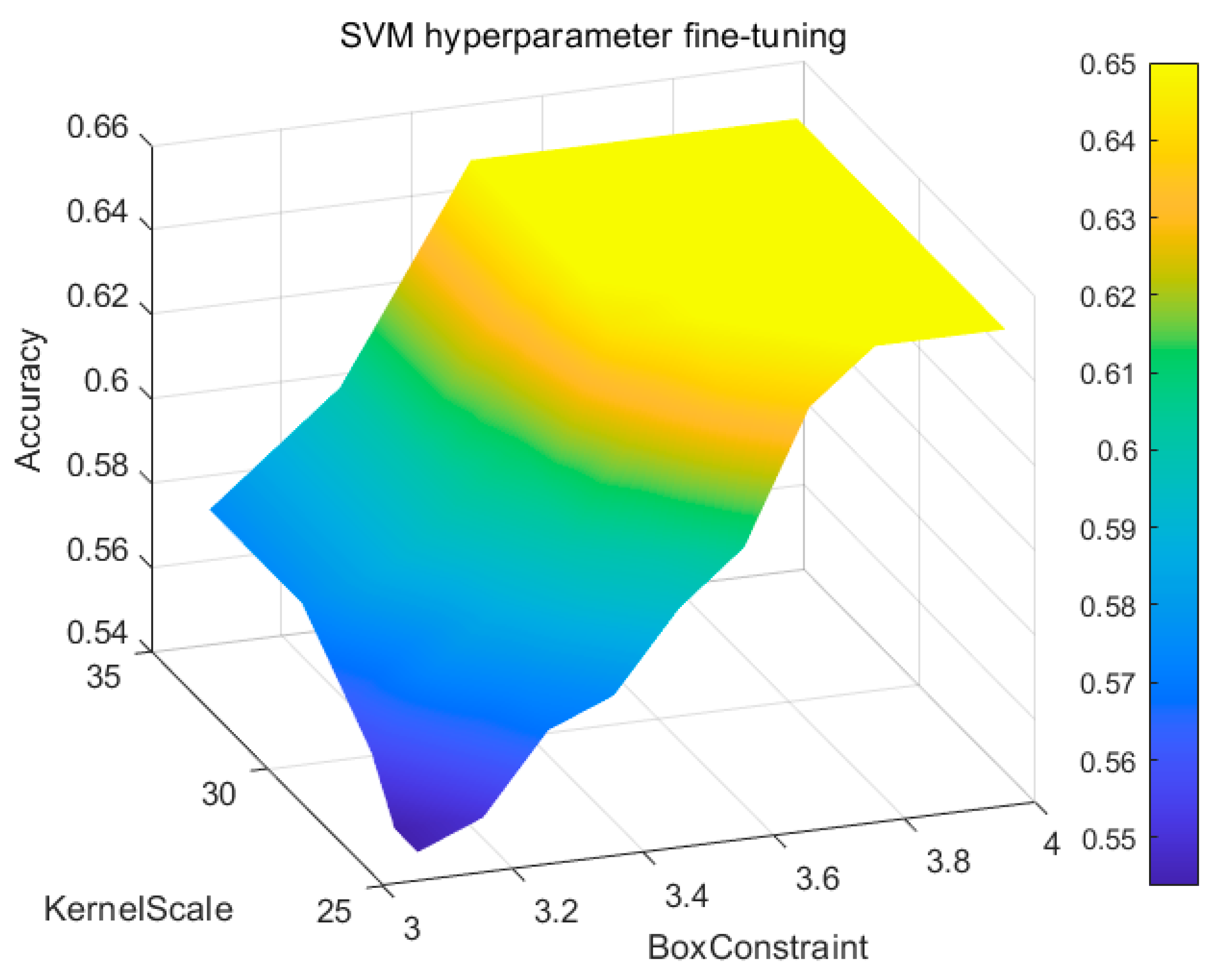
2.5.2. SVM Principle
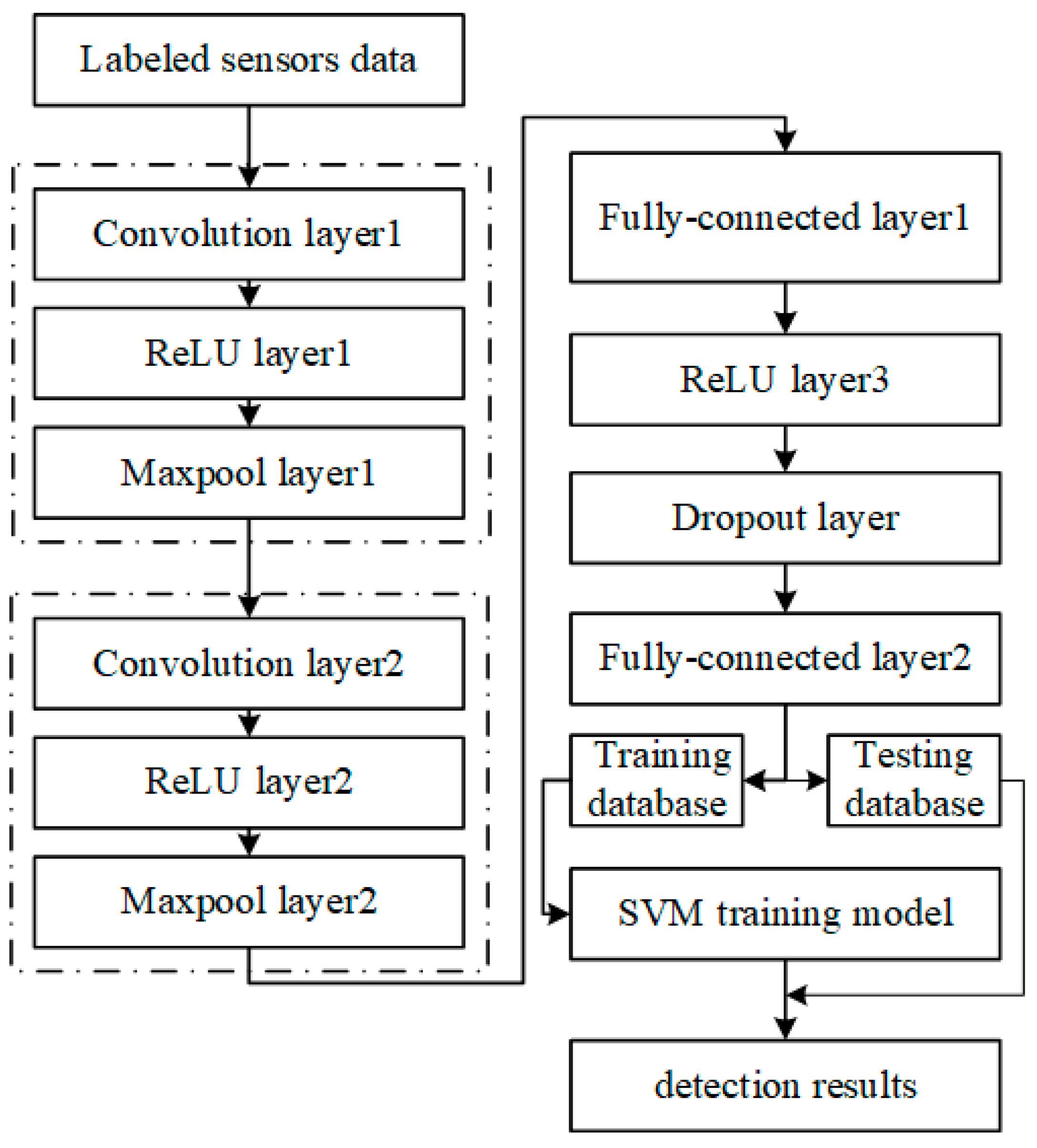
2.5.3. CNN–SVM Principle
2.6. Heading Angle Fusion
2.6.1. Heading Estimation without Magnetic Interference
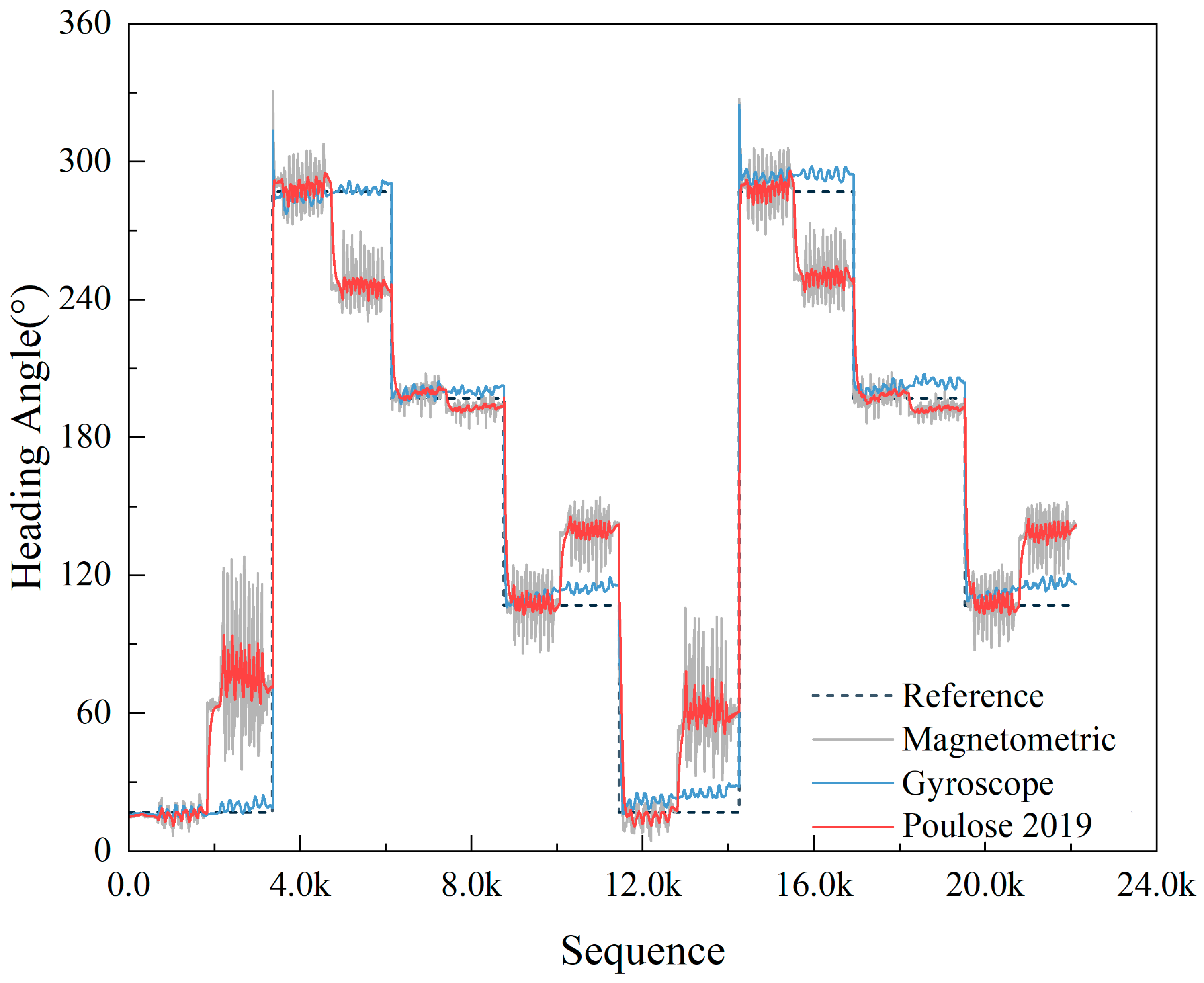
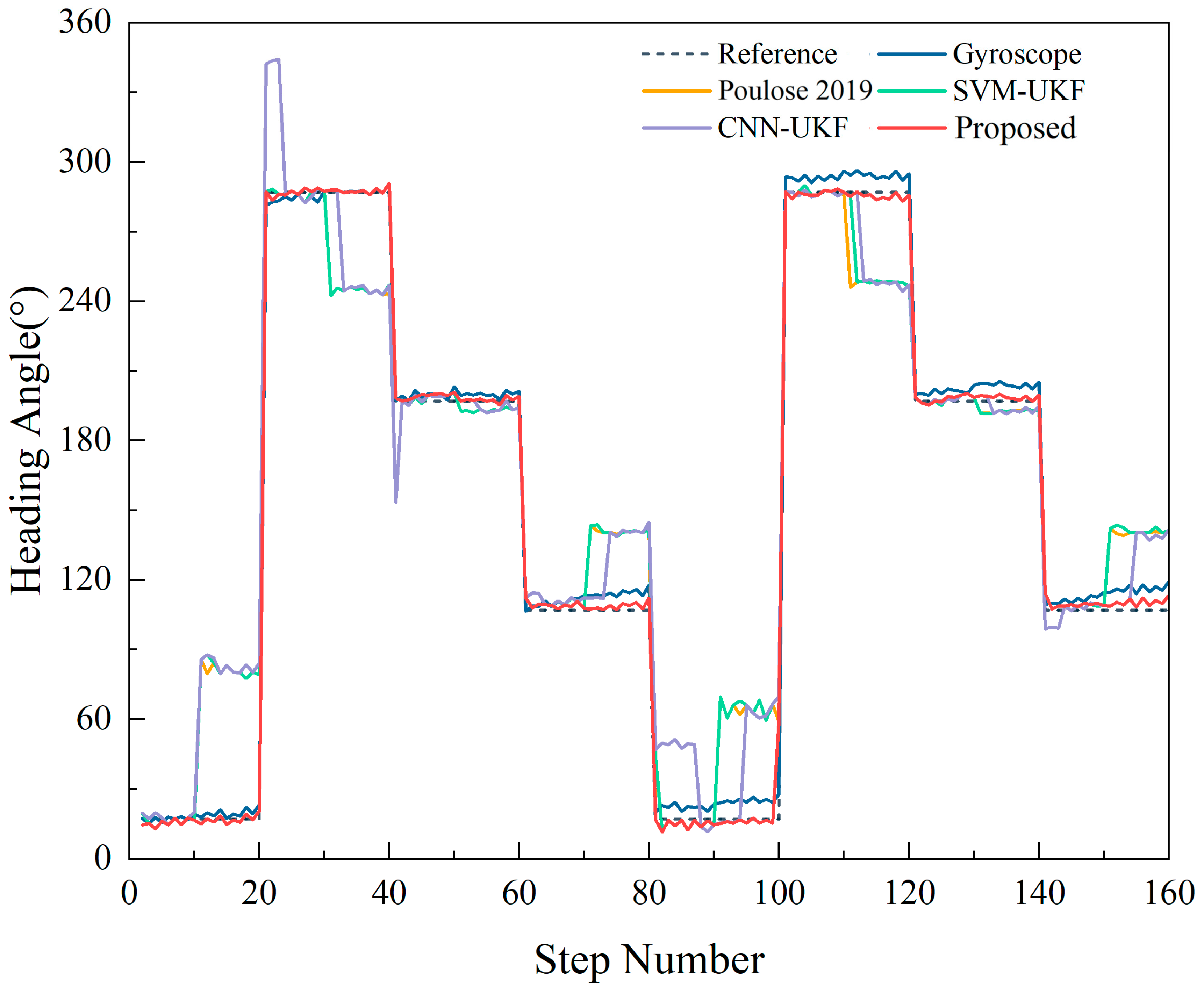
2.6.2. Heading Estimation under Magnetic Interference
2.7. Accuracy Evaluation Metrics
3. Results
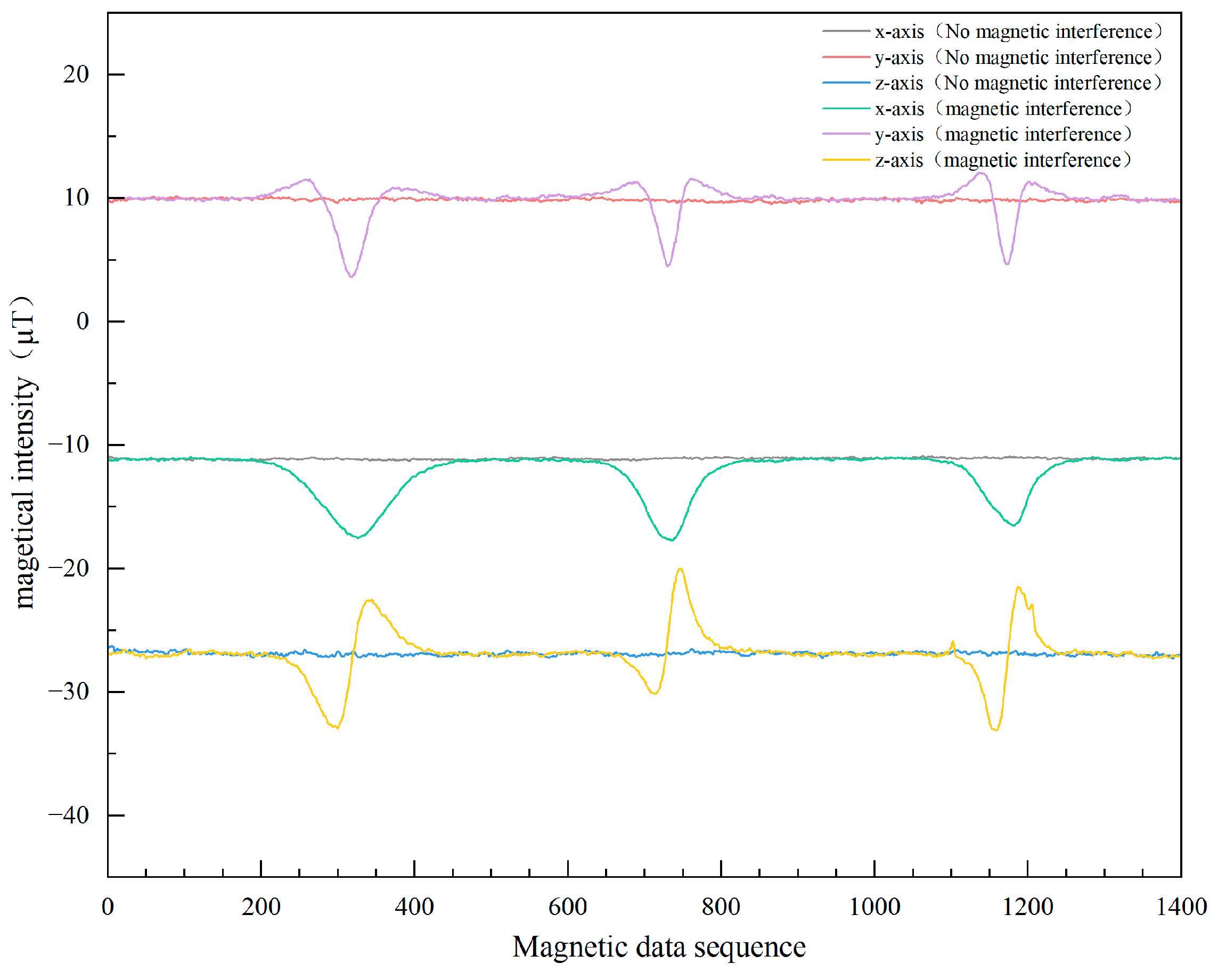
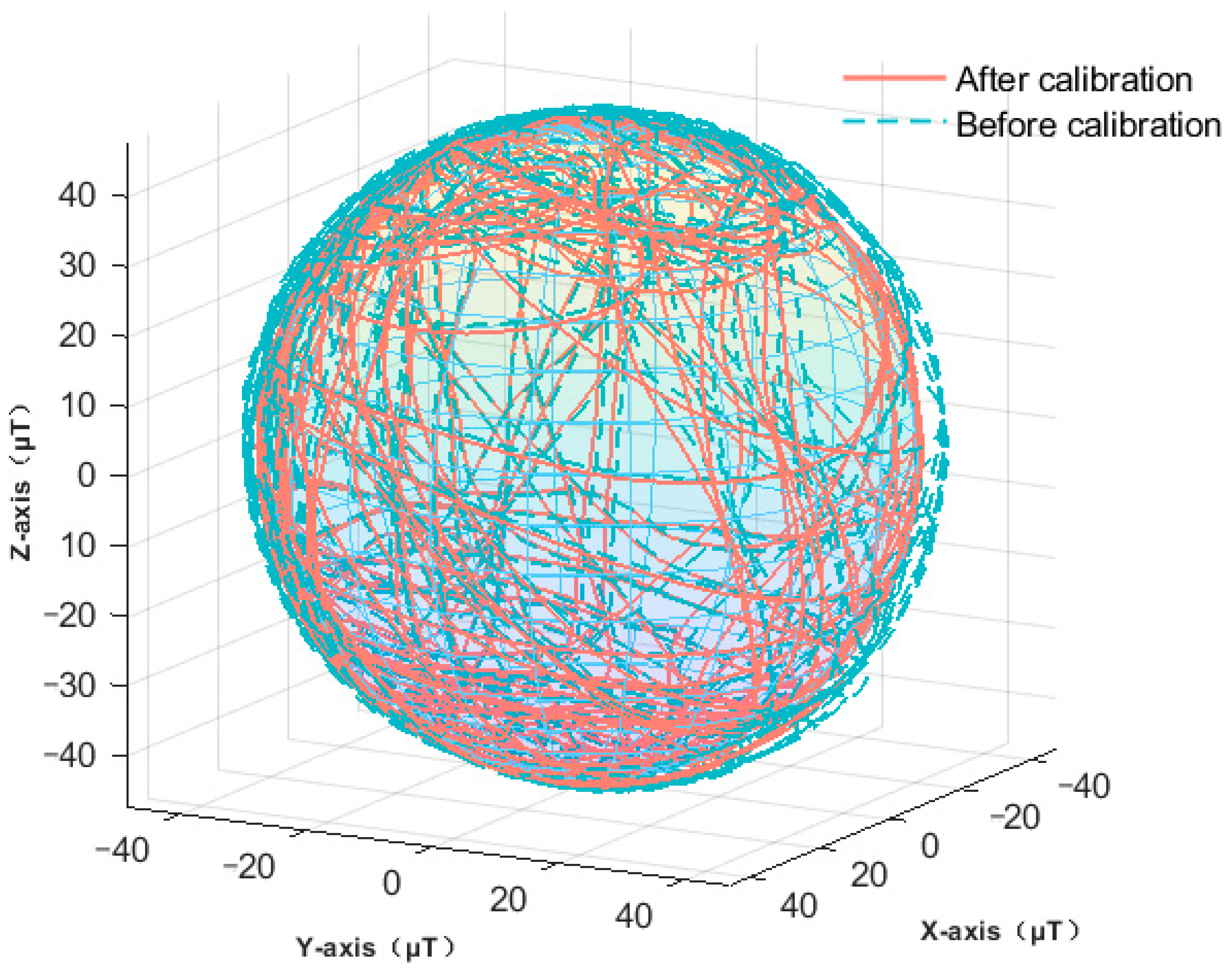
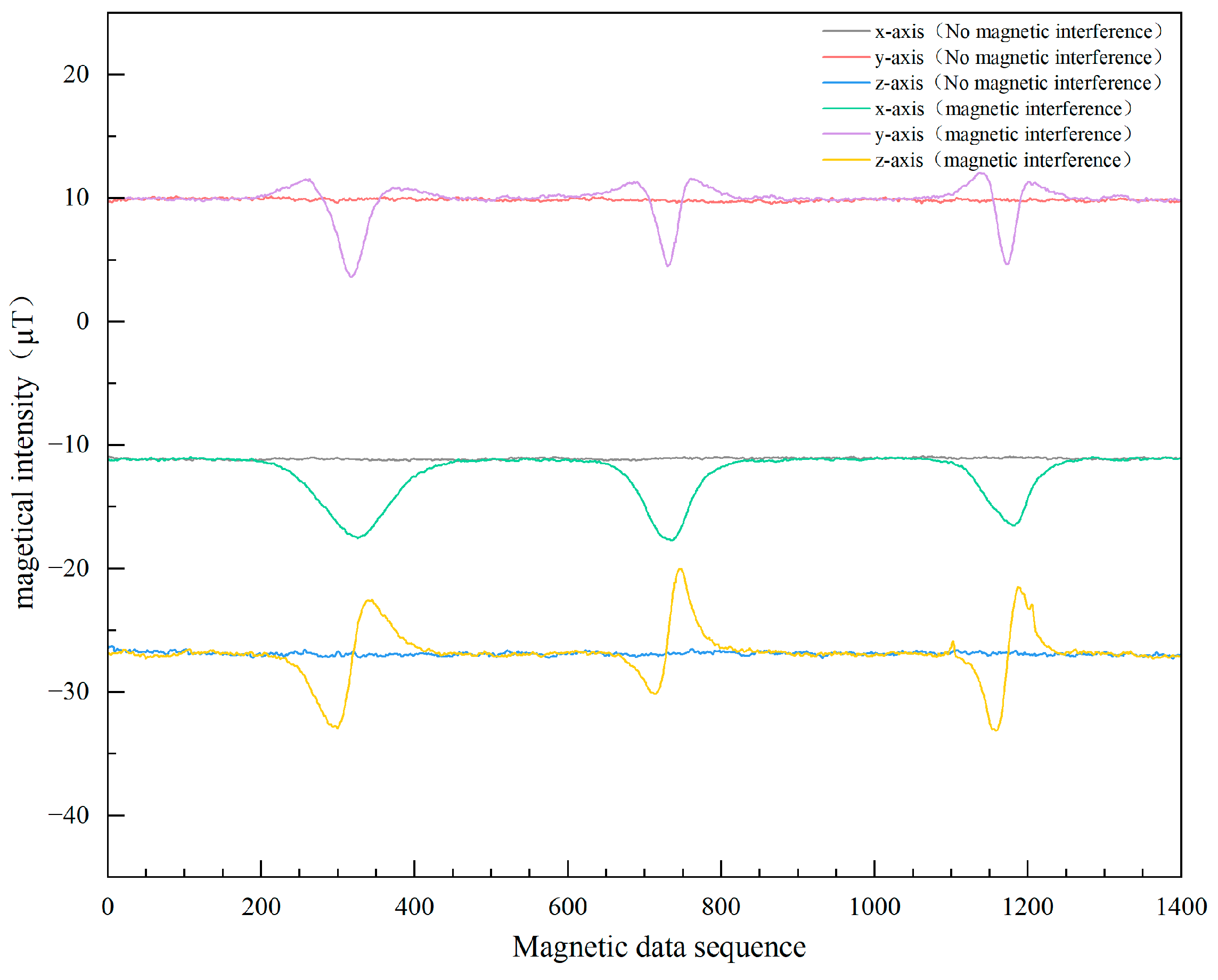
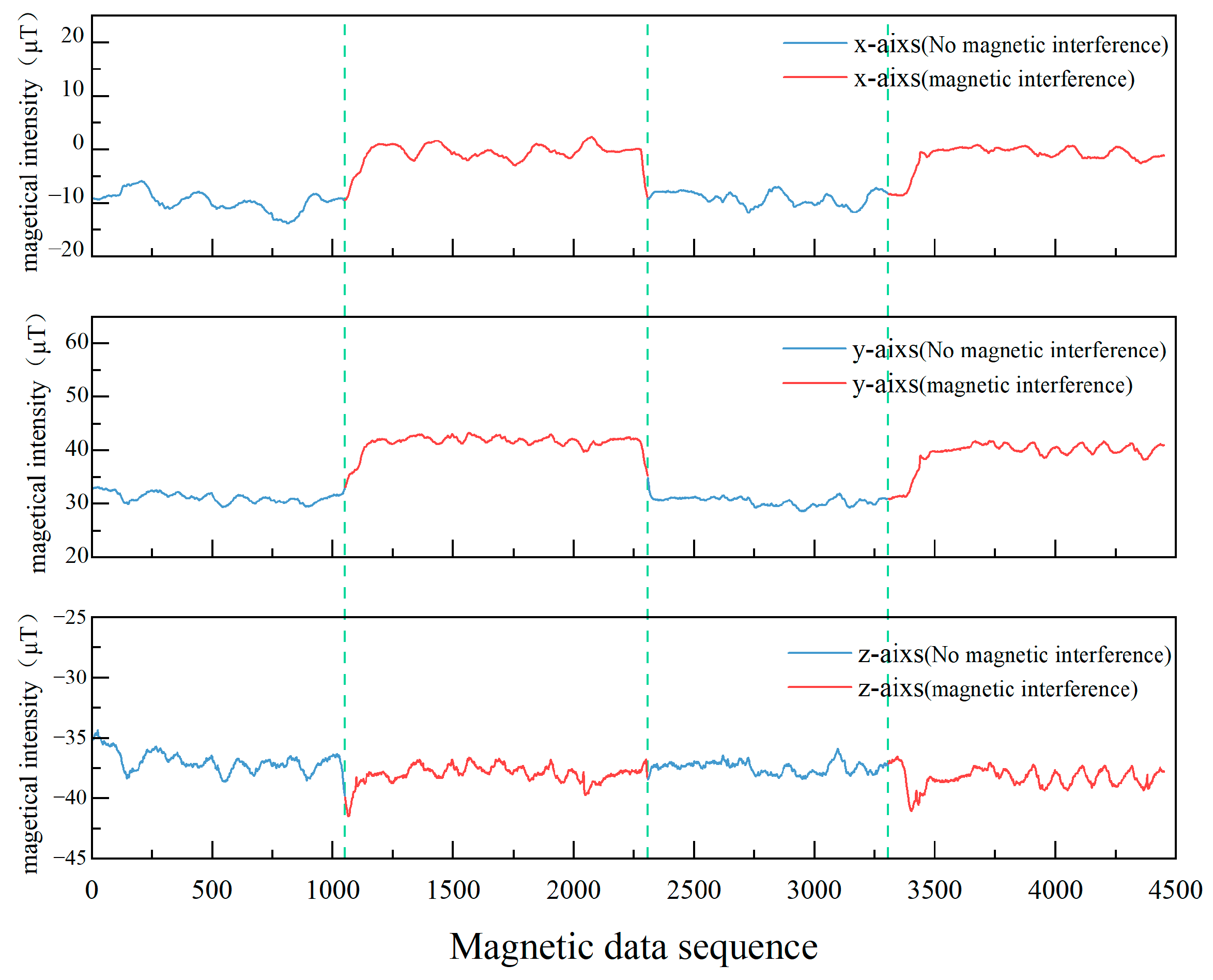
3.1. Comparative Data Analysis
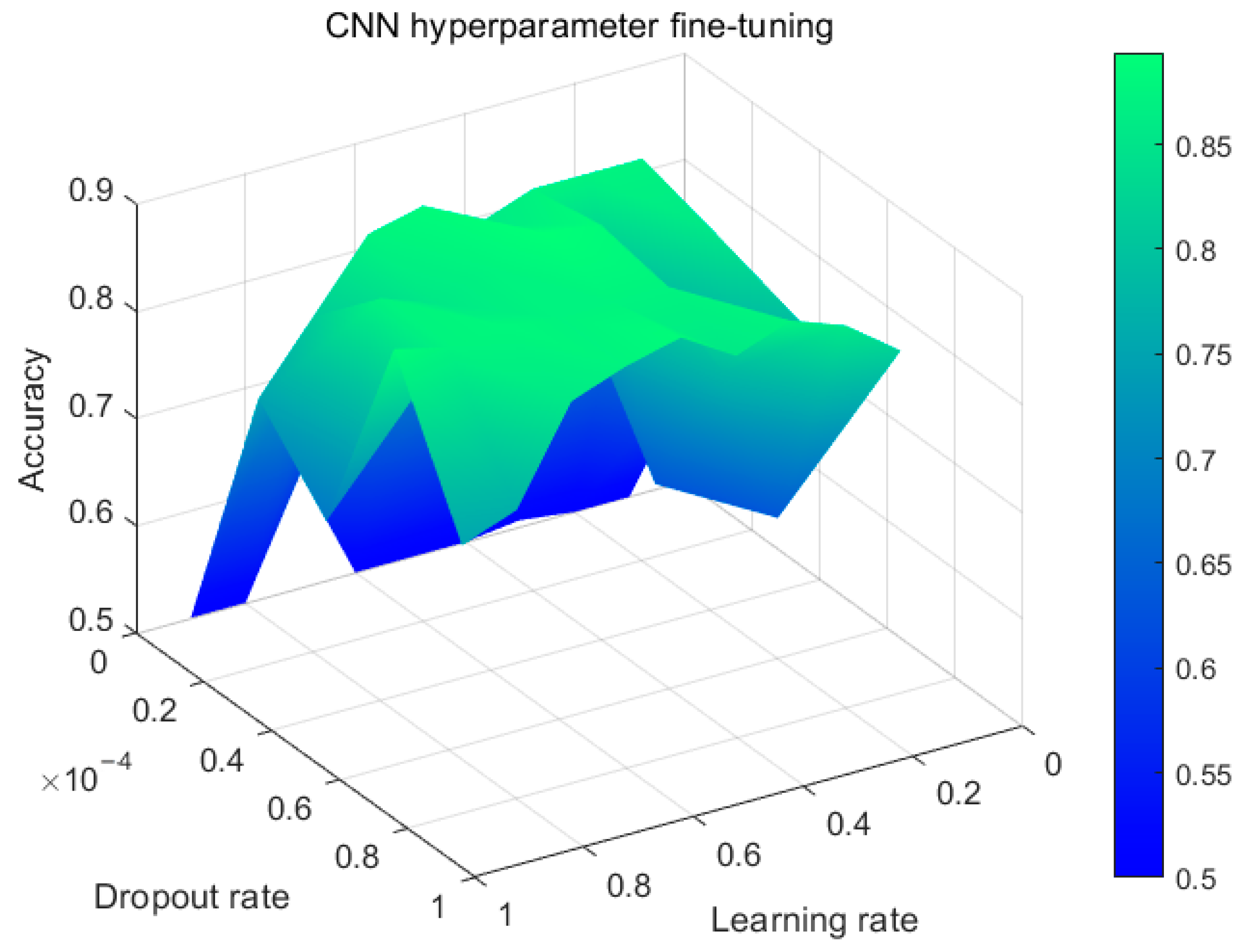
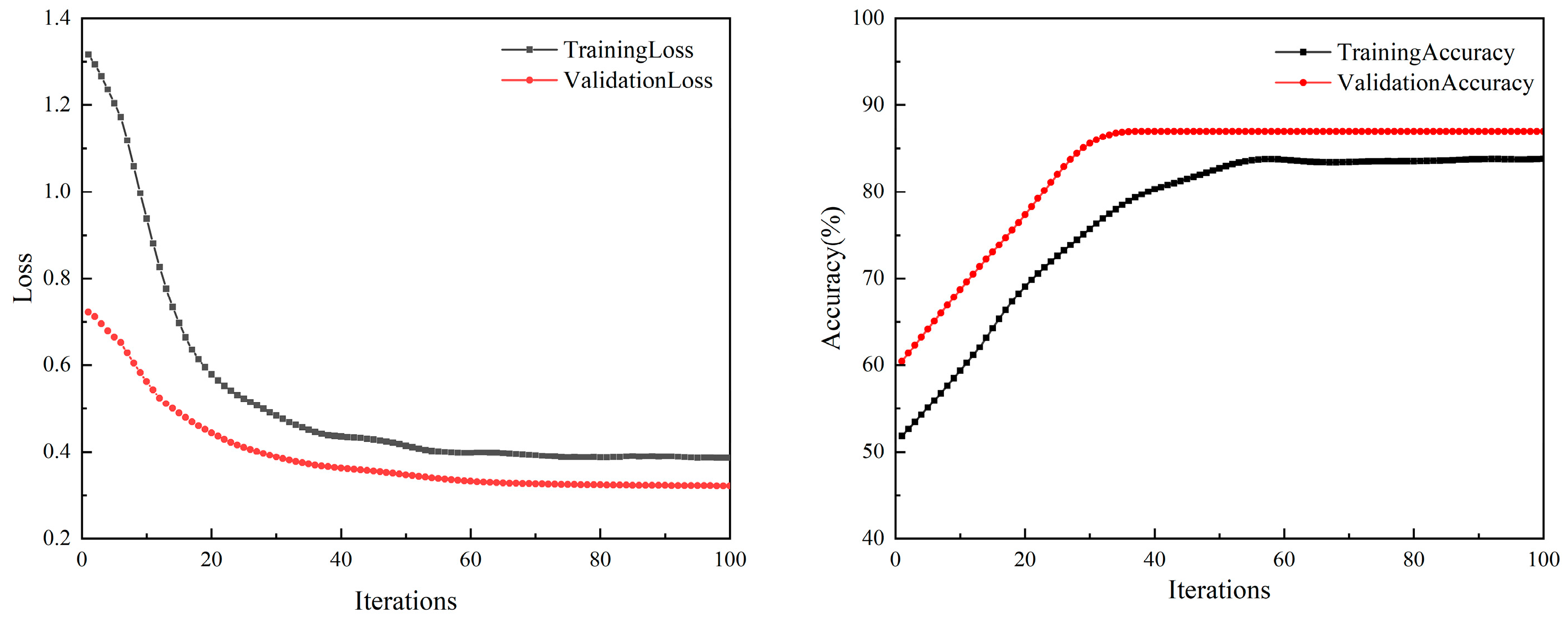
3.2. Model Accuracy Comparison
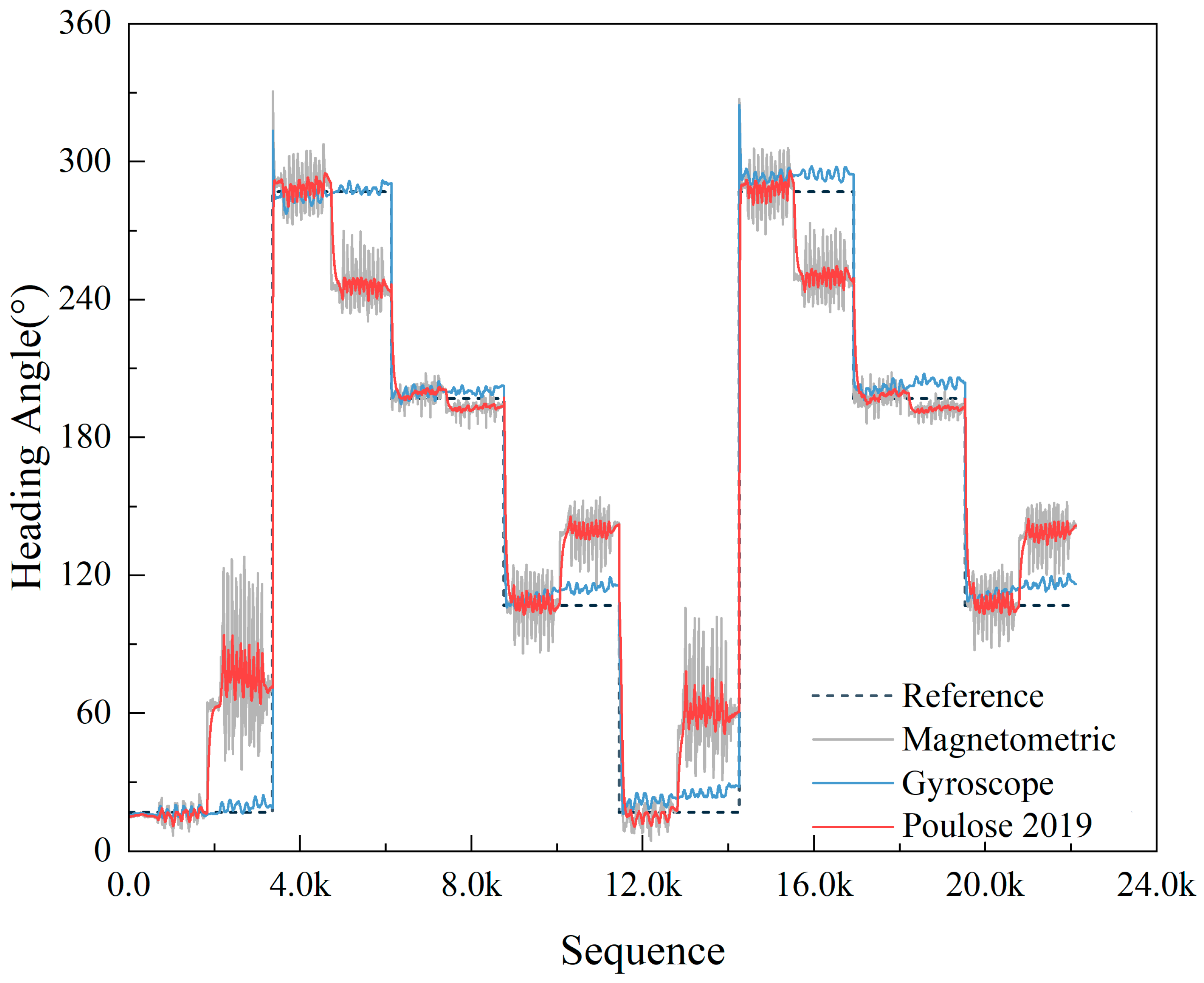
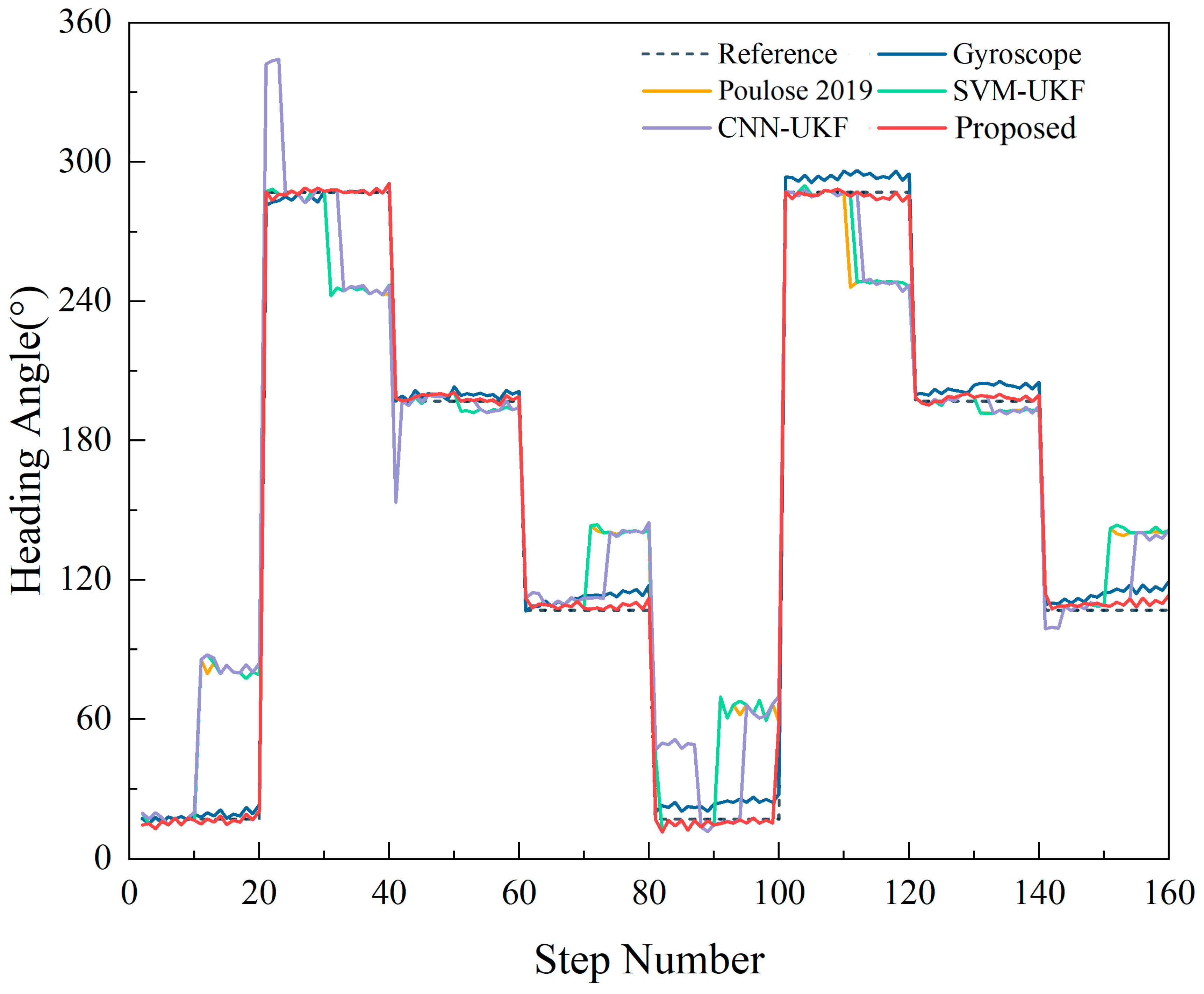
3.3. Comparison of Heading Estimation Accuracy
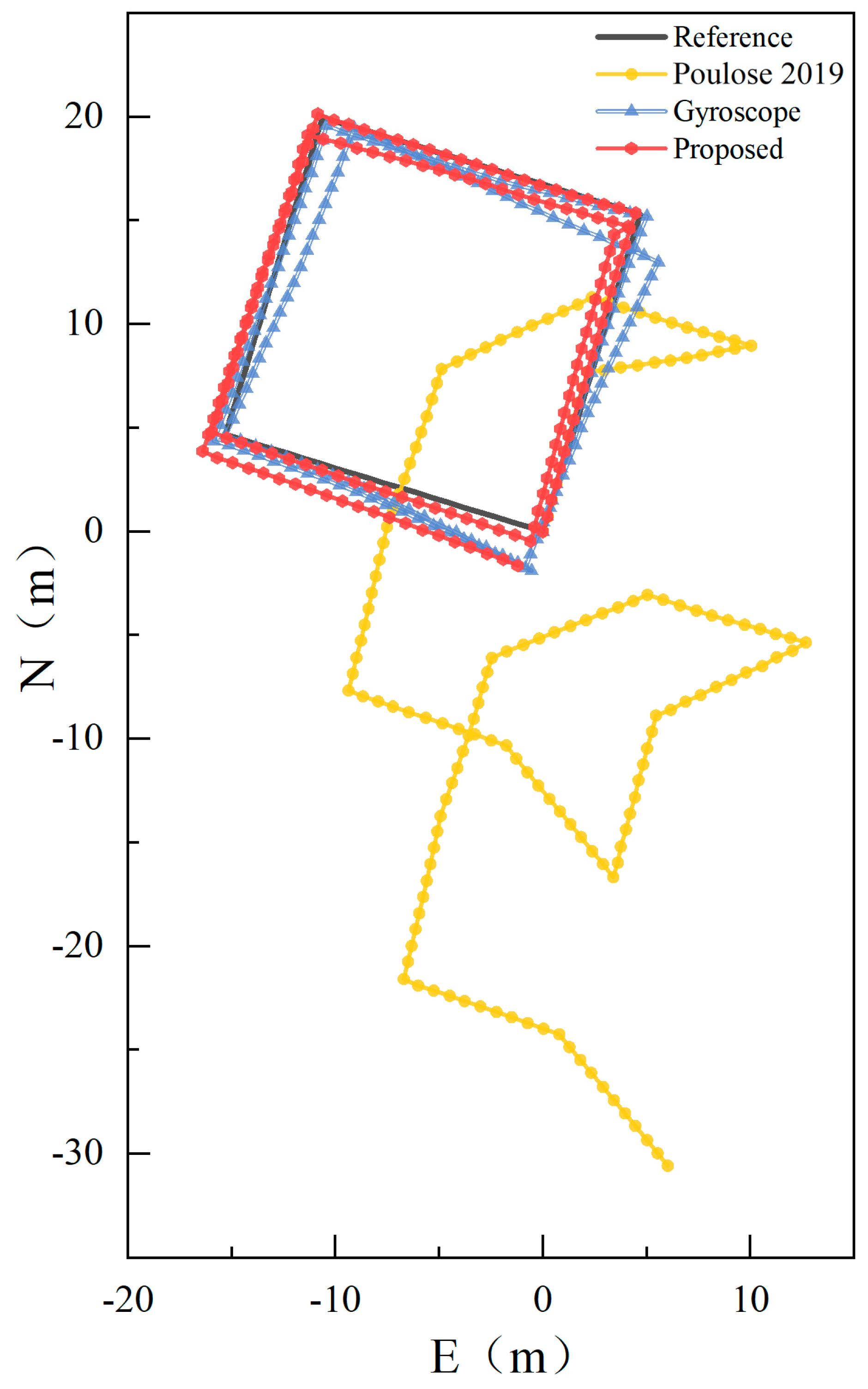
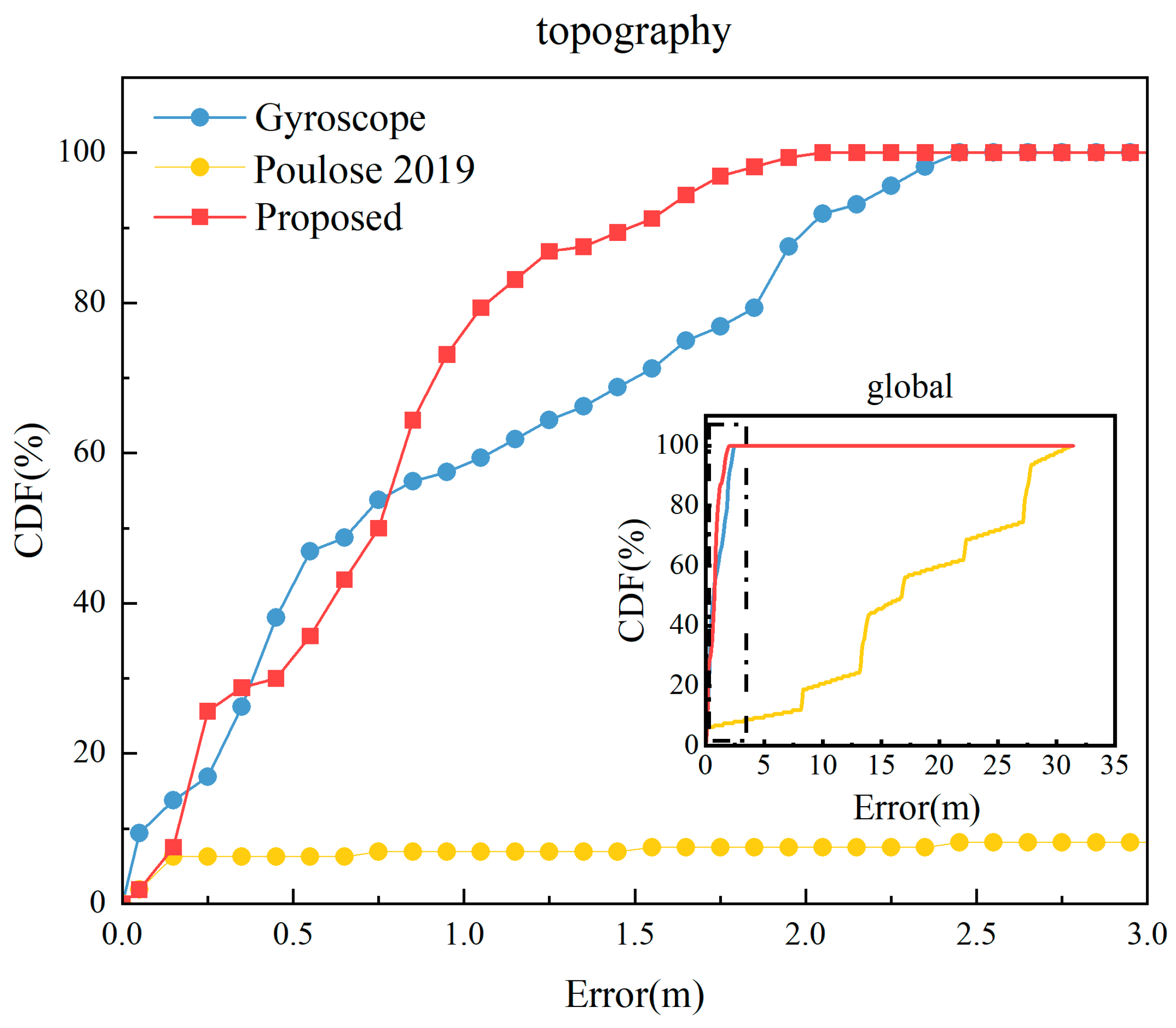
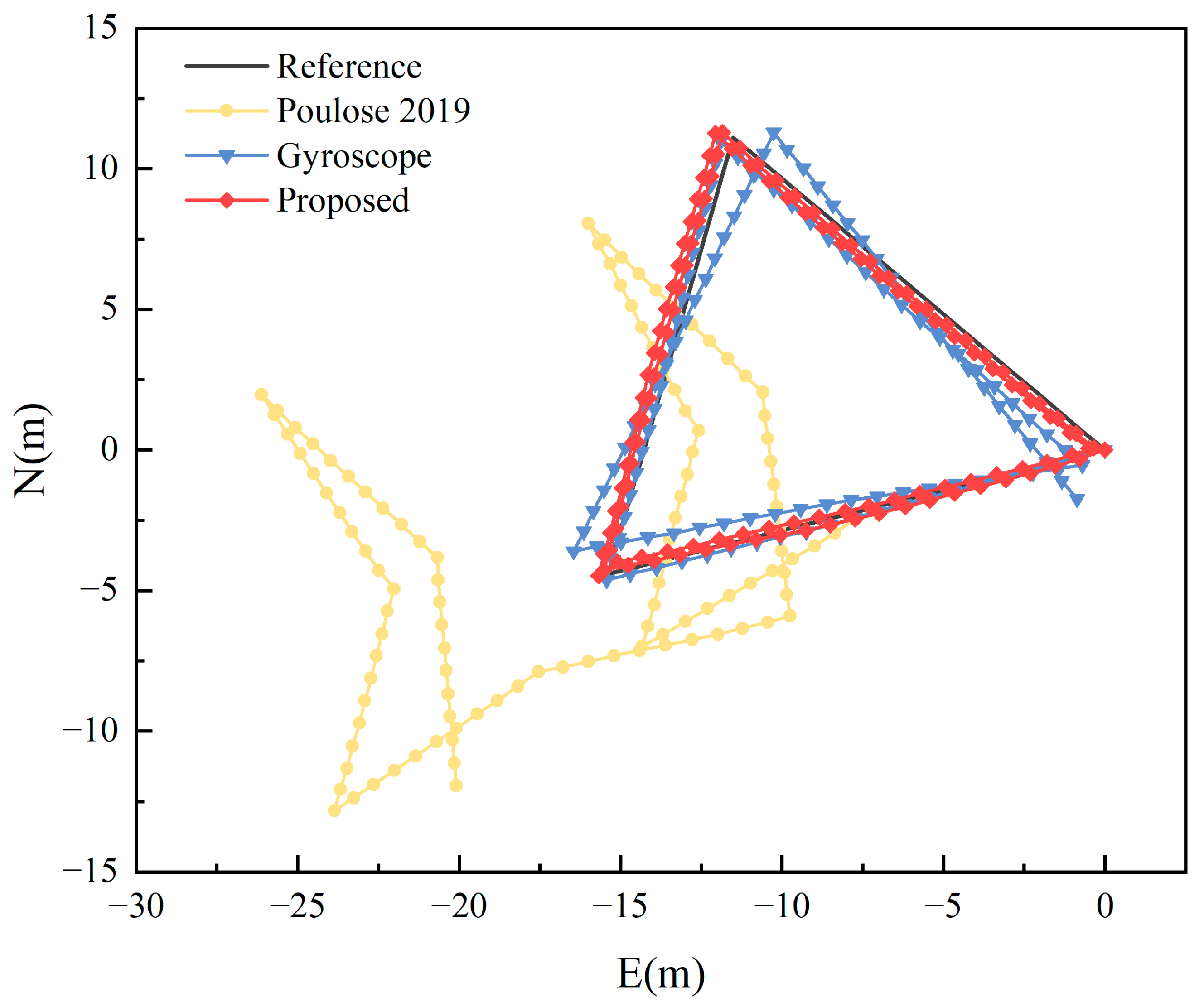
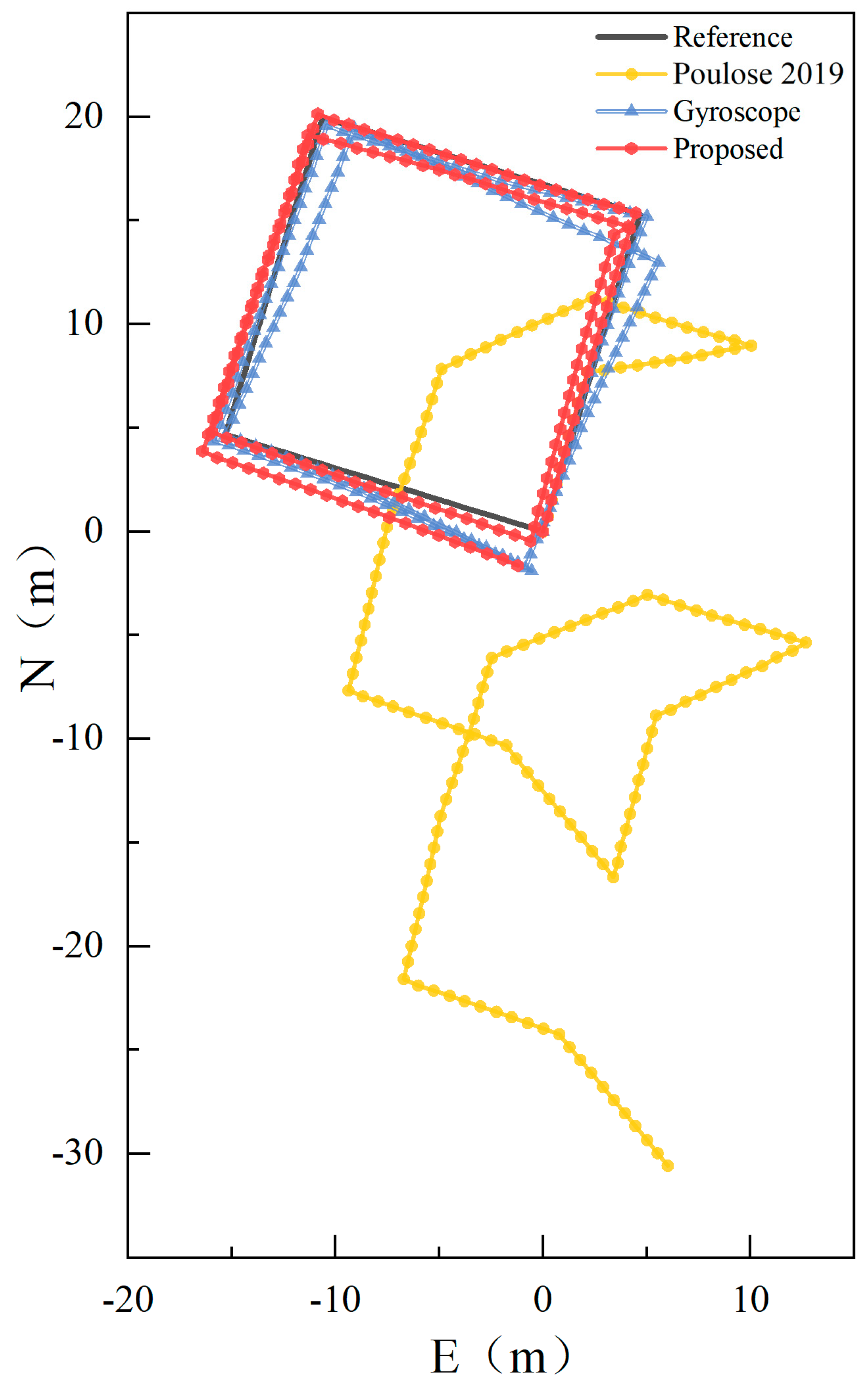
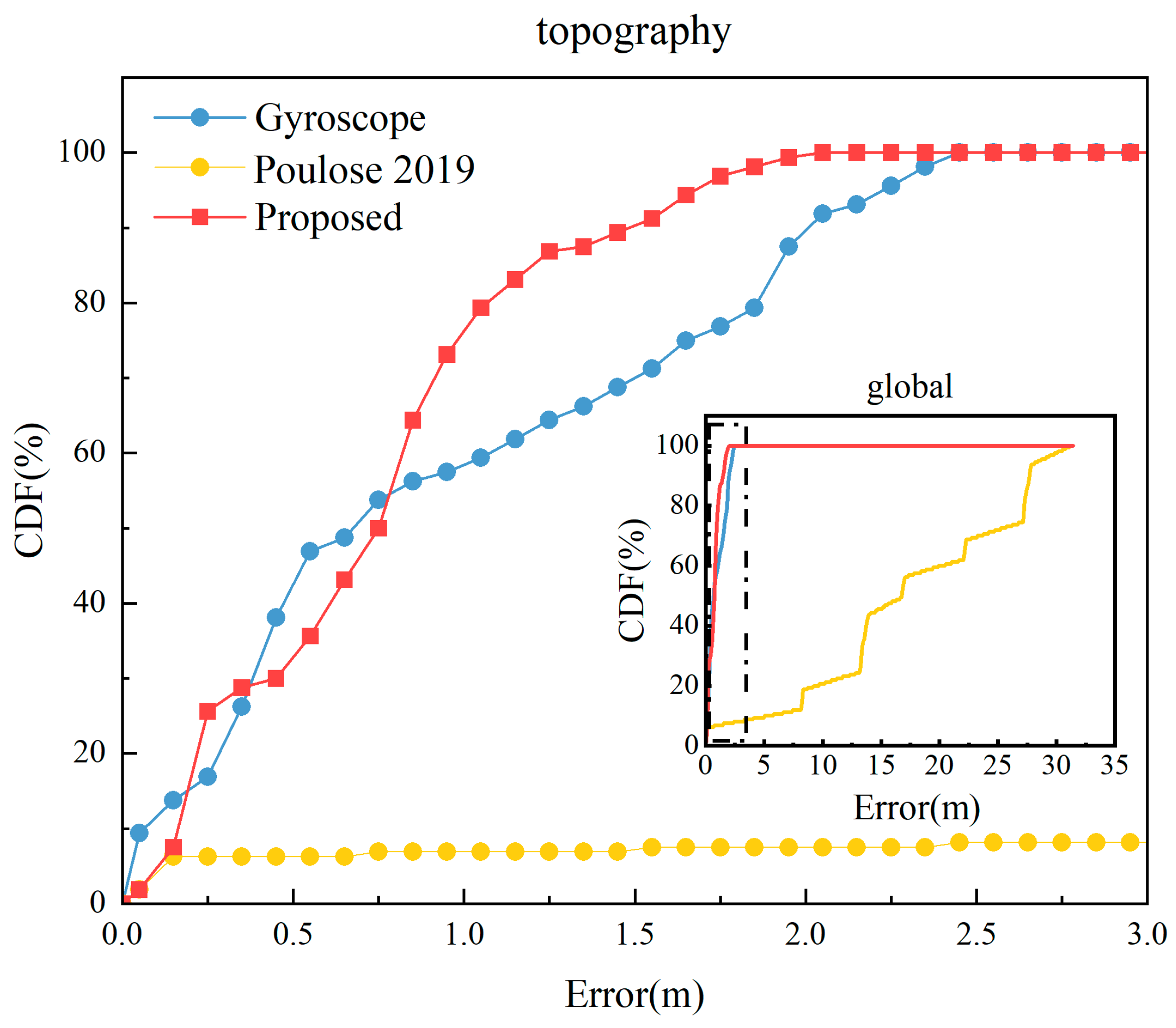
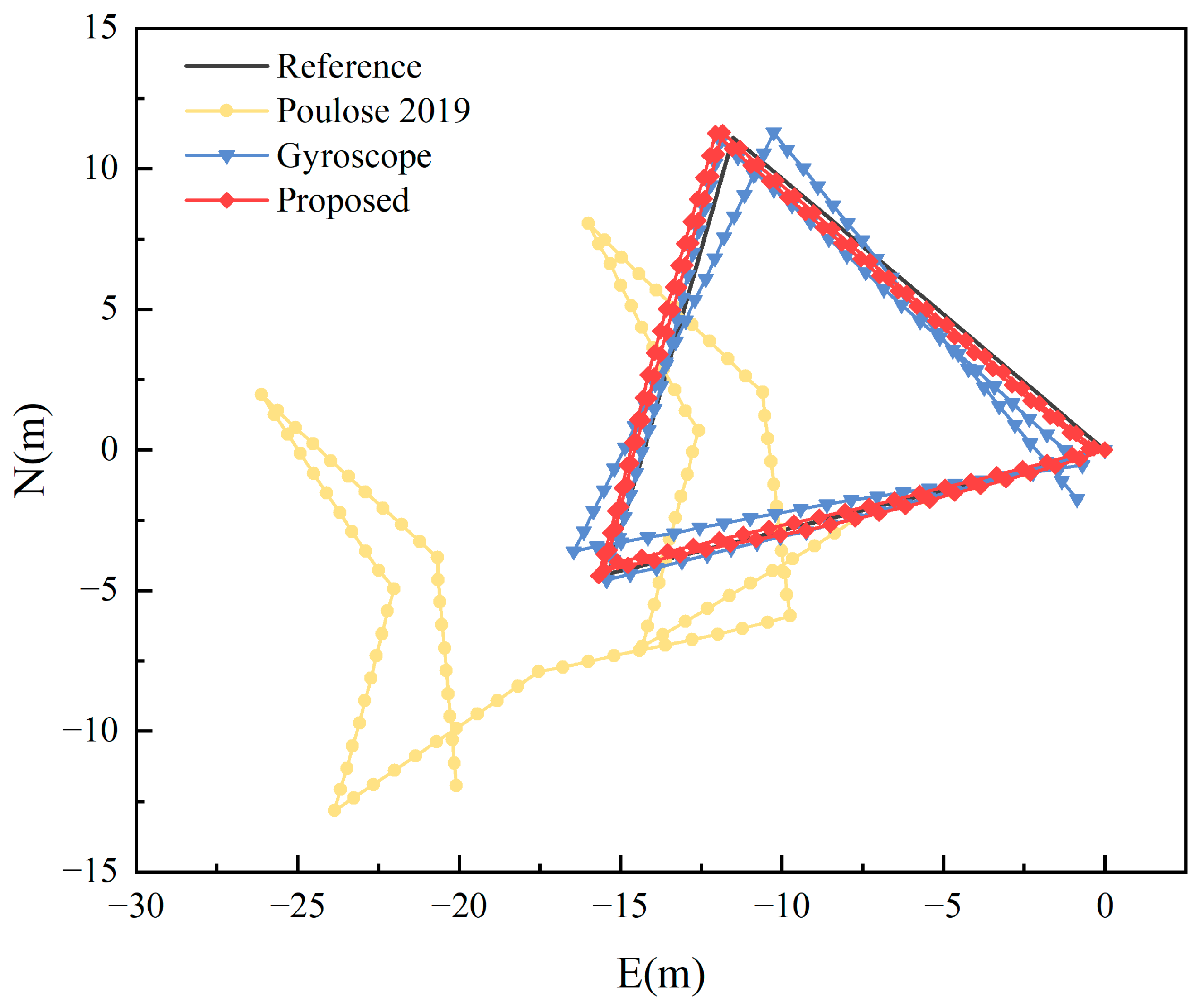
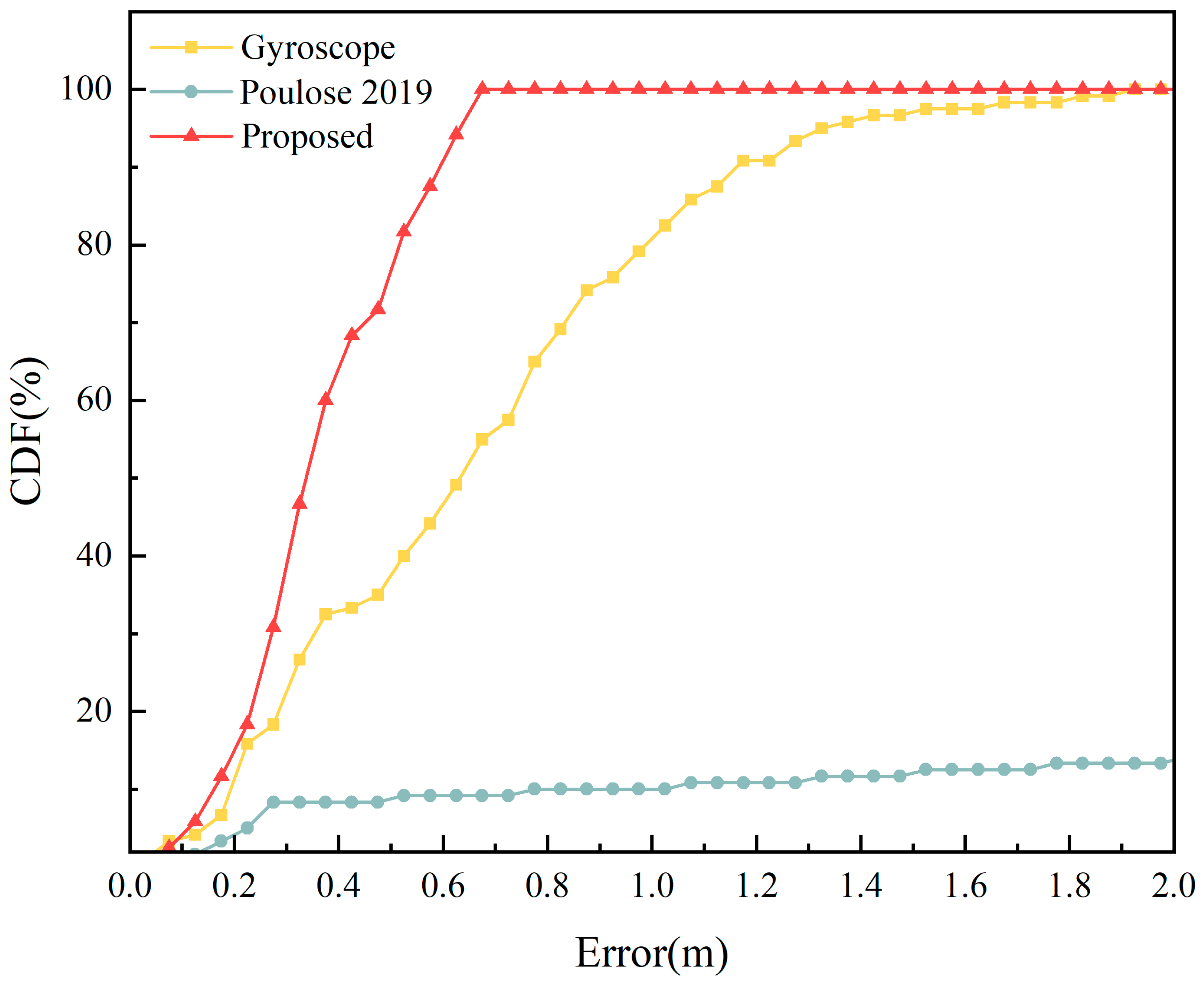
3.4. Pedestrian Motion Trajectory Estimation
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Sadhukhan, P.; Dahal, K.; Das, P.K. A Novel Weighted Fusion based Efficient Clustering for Improved Wi-Fi Fingerprint Indoor Positioning. IEEE Trans. Wirel. Commun. 2022, 22, 4461–4474. [Google Scholar] [CrossRef]
- Szyc, K.; Nikodem, M.; Zdunek, M. Bluetooth low energy indoor localization for large industrial areas and limited infrastructure. Ad. Hoc. Netw. 2023, 139, 103024. [Google Scholar] [CrossRef]
- Fontaine, J.; Van Herbruggen, B.; Shahid, A.; Kram, S.; Stahlke, M.; De Poorter, E. Ultra Wideband (UWB) localization using active CIR-based fingerprinting. IEEE Commun. Lett. 2023, 27, 1322–1326. [Google Scholar] [CrossRef]
- Xu, S.; Wu, Y.; Wang, X.; Wei, F. Indoor High Precision Positioning System Based on Visible Light Communication and Location Fingerprinting. J. Lightwave Technol. 2023, 41, 5564–5576. [Google Scholar] [CrossRef]
- Xiao, C.; Yang, D.; Chen, Z.; Tan, G. 3-D BLE Indoor Localization Based on Denoising Autoencoder. IEEE Access 2017, 5, 12751–12760. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y.; Huang, L.; Jia, H.; Bi, J.; Joseph, W.; Plets, D. Geomagnetic positioning-aided Wi-Fi FTM localization algorithm for NLOS environments. IEEE Commun. Lett. 2022, 26, 1022–1026. [Google Scholar] [CrossRef]
- Zheng, H.; Gao, M.; Chen, Z.; Liu, X.; Feng, X. An adaptive sampling scheme via approximate volume sampling for fingerprint-based indoor localization. IEEE Internet Things J. 2019, 6, 2338–2353. [Google Scholar] [CrossRef]
- Hou, X.; Bergmann, J. Pedestrian dead reckoning with wearable sensors: A systematic review. IEEE Sens. J. 2020, 21, 143–152. [Google Scholar] [CrossRef]
- Bao, S.; Meng, X.; Xiao, W.; Zhang, Z. Fusion of inertial/magnetic sensor measurements and map information for pedestrian tracking. Sensors 2017, 17, 340. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, H.; Du, Q.; Tang, S. A pedestrian dead-reckoning system for walking and marking time mixed movement using an SHSs scheme and a foot-mounted IMU. IEEE Sens. J. 2018, 19, 1661–1671. [Google Scholar] [CrossRef]
- Xie, L.; Tian, J.; Ding, G.; Zhao, Q. Holding-manner-free heading change estimation for smartphone-based indoor positioning. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Zhou, R. Pedestrian dead reckoning on smartphones with varying walking speed. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Magnetic field based heading estimation for pedestrian navigation environments. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–10. [Google Scholar]
- Alatise, M.B.; Hancke, G.P. Pose estimation of a mobile robot based on fusion of IMU data and vision data using an extended Kalman filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef] [PubMed]
- Bravo, J.; Herrera, E.P.; Sierra, D.A. Comparison of step length and heading estimation methods for indoor environments. In Proceedings of the 2017 IEEE XXIV International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Cusco, Peru, 15–18 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Nguyen, P.; Akiyama, T.; Ohashi, H.; Nakahara, G.; Yamasaki, K.; Hikaru, S. User-friendly heading estimation for arbitrary smartphone orientations. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–7. [Google Scholar]
- Yang, X.; Huang, B.; Miao, Q. A step-wise algorithm for heading estimation via a smartphone. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 4598–4602. [Google Scholar]
- Ma, W.; Wu, J.; Long, C.; Zhu, Y. HiHeading: Smartphone-based indoor map construction system with high accuracy heading inference. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 172–1777. [Google Scholar]
- Wu, Y.; Zou, D.; Liu, P.; Yu, W. Dynamic magnetometer calibration and alignment to inertial sensors by Kalman filtering. IEEE Trans. Control. Syst. Technol. 2017, 26, 716–723. [Google Scholar] [CrossRef]
- Poulose, A.; Senouci, B.; Han, D.S. Performance Analysis of Sensor Fusion Techniques for Heading Estimation Using Smartphone Sensors. IEEE Sens. J. 2019, 19, 12369–12380. [Google Scholar] [CrossRef]
- El-Diasty, M. An accurate heading solution using MEMS-based gyroscope and magnetometer integrated system (preliminary results). Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 75–78. [Google Scholar] [CrossRef]
- Farahan, S.B.; Machado, J.J.M.; de Almeida, F.G.; Tavares, J.M.R.S. 9-DOF IMU-Based Attitude and Heading Estimation Using an Extended Kalman Filter with Bias Consideration. Sensors 2022, 22, 3416. [Google Scholar] [CrossRef]
- Shin, E.; El-Sheimy, N. An unscented Kalman filter for in-motion alignment of low-cost IMUs. In Proceedings of the PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No. 04CH37556), Monterey, CA, USA, 26–29 April 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 273–279. [Google Scholar]
- Tian, J.; Cong, L.; Qin, H. A PDR heading estimation method based on motion mode recognition using adaptive UKF. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–8. [Google Scholar]
- Pei, L.; Liu, D.; Zou, D.; Choy, R.L.F.; Chen, Y.; He, Z. Optimal heading estimation based multidimensional particle filter for pedestrian indoor positioning. IEEE Access 2018, 6, 49705–49720. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Effect of local magnetic field disturbances on inertial measurement units accuracy. Appl. Ergon. 2017, 63, 123–132. [Google Scholar] [CrossRef]
- Suh, Y.S.; Ro, Y.S.; Kang, H.J. Quaternion-based indirect Kalman filter discarding pitch and roll information contained in magnetic sensors. IEEE Trans. Instrum. Meas. 2012, 61, 1786–1792. [Google Scholar] [CrossRef]
- Vandermeeren, S.; Steendam, H. Deep-Learning-Based Step Detection and Step Length Estimation with a Handheld IMU. IEEE Sens. J. 2022, 22, 24205–24221. [Google Scholar] [CrossRef]
- Tu, P.; Li, J.; Wang, H.; Wang, K.; Yuan, Y. Epidemic contact tracing with campus WiFi network and smartphone-based pedestrian dead reckoning. IEEE Sens. J. 2021, 21, 19255–19267. [Google Scholar] [CrossRef]
- Sangenis, E.; Jao, C.; Shkel, A.M. SVM-based Motion Classification Using Foot-mounted IMU for ZUPT-aided INS. In Proceedings of the 2022 IEEE Sensors, Dallas, TX, USA, 30 October–2 November 2022; IEEE: New York, NY, USA, 2022; pp. 1–4. [Google Scholar]
- Yao, Y.; Liu, Y.; Zhou, Z.; Xu, X. A Magnetic Interference Detection-Based Fusion Heading Estimation Method for Pedestrian Dead Reckoning Positioning. IEEE Sens. J. 2023, 23, 677–688. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, B.; Xu, Z.; Yang, R. A Fuzzy Logic-Based Energy-Adaptive Localization Scheme by Fusing WiFi and PDR. Wirel. Commun. Mob. Comput. 2023, 2023, 1–17. [Google Scholar] [CrossRef]
- Wang, X.; Chen, G.; Cao, X.; Zhang, Z.; Yang, M.; Jin, S. Robust and Accurate Step Counting Based on Motion Mode Recognition for Pedestrian Indoor Positioning Using a Smartphone. IEEE Sens. J. 2022, 22, 4893–4907. [Google Scholar] [CrossRef]
- Brajdic, A.; Harle, R. Walk Detection and Step Counting on Unconstrained Smartphones; ACM: New York, NY, USA, 2013; pp. 225–234. [Google Scholar]
- Gobana, F.W. Survey of Inertial/Magnetic Sensors Based Pedestrian Dead Reckoning by Multi-Sensor Fusion Method; IEEE: Piscataway, NJ, USA, 2018; pp. 1327–1334. [Google Scholar]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications. Vol. 2023-02-03, 2002. Online Resource. Available online: http://www.bdtic.com/DownLoad/ADI/AN-602.pdf (accessed on 10 May 2023).
- Tulapurkar, H.; Banerjee, B.; Buddhiraju, K.M. Multi-head attention with CNN and wavelet for classification of hyperspectral image. Neural Comput. Appl. 2023, 35, 7595–7609. [Google Scholar] [CrossRef]
- Ciresan, D.C.; Meier, U.; Masci, J.; Gambardella, L.M.; Schmidhuber, J. Flexible, high performance convolutional neural networks for image classification. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Catalonia, Spain, 16–22 July 2011. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Zhu, J.; Ju, Y.; Xia, M. Vehicle recognition model based on improved CNN-SVM. In Proceedings of the 2021 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (AINIT), Shanghai, China, 15–17 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 294–297. [Google Scholar]
- Wang, Y.; Cheng, H.; Meng, M.Q.H. Inertial Odometry Using Hybrid Neural Network with Temporal Attention for Pedestrian Localization. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Rajamani, R. Direction cosine matrix estimation with an inertial measurement unit. Mech. Syst. Signal Process. 2018, 109, 268–284. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S.D. Three-axis attitude determination from vector observations. J. Guid. Control. 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Hajati, N.; Rezaeizadeh, A. A Wearable Pedestrian Localization and Gait Identification System Using Kalman Filtered Inertial Data. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | CNN | SVM | CNN–SVM |
|---|---|---|---|
| Accuracy Rate (%) | 89.38% | 65.00% | 99.38% |
| F1 (%) | 88.89% | 60.42% | 99.37% |
| Offline Training Time (s) | 13.139411 | 0.416145 | 13.5250 |
| Online Detection Time (s) | 0.603868 | 0.036875 | 0.058248 |
| Attribute | Absence of Magnetic Interference | Under Magnetic Interference | |||||
|---|---|---|---|---|---|---|---|
| Gyroscope | Magnetometer | UKF | Gyroscope | SVM–UKF | CNN–UKF | Proposed | |
| Average (°) | 3.6895 | 3.8822 | 1.7948 | 5.7115 | 33.4564 | 26.5877 | 2.1891 |
| Model | Literature [21] | Gyroscope | Proposed |
|---|---|---|---|
| AE(m) | 17.2639 | 0.9918 | 0.7865 |
| RAE(%) | 13.4874% | 0.7748% | 0.6145% |
| (m) | 230.9076 | 13.2120 | 8.8995 |
| Model | Literature [21] | Gyroscope | Proposed |
|---|---|---|---|
| AE (m) | 9.2753 | 0.6815 | 0.3856 |
| RAE (%) | 9.6618% | 0.7099% | 0.4017% |
| (m) | 101.1502 | 6.4057 | 4.3837 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, P.; Yu, X.; Han, Y.; Xiao, X.; Liu, Y. Improving Indoor Pedestrian Dead Reckoning for Smartphones under Magnetic Interference Using Deep Learning. Sensors 2023, 23, 9348. https://doi.org/10.3390/s23239348
Zhu P, Yu X, Han Y, Xiao X, Liu Y. Improving Indoor Pedestrian Dead Reckoning for Smartphones under Magnetic Interference Using Deep Learning. Sensors. 2023; 23(23):9348. https://doi.org/10.3390/s23239348
Chicago/Turabian StyleZhu, Ping, Xuexiang Yu, Yuchen Han, Xingxing Xiao, and Yu Liu. 2023. "Improving Indoor Pedestrian Dead Reckoning for Smartphones under Magnetic Interference Using Deep Learning" Sensors 23, no. 23: 9348. https://doi.org/10.3390/s23239348
APA StyleZhu, P., Yu, X., Han, Y., Xiao, X., & Liu, Y. (2023). Improving Indoor Pedestrian Dead Reckoning for Smartphones under Magnetic Interference Using Deep Learning. Sensors, 23(23), 9348. https://doi.org/10.3390/s23239348