1. Introduction
Pavement cracks are the most prevalent type of road distress, which affects its lifetime. A crucial component of the maintenance mission is frequent and accurate crack detection. Sealed cracks represent another crucial aspect of pavement distress that demands thorough evaluation within the pavement management framework. Sealing cracks involves filling existing cracks in the surface layer of asphalt concrete pavement with sealant. Damage to these sealed cracks can adversely impact the visual appeal of the pavement, vehicle operation, and overall driving comfort [
1]. Detecting pavement cracks and sealed cracks is crucial for road safety, preventing further damage, and prolonging pavement lifespan [
2,
3,
4]. The traditional manual inspection of roads is not only time-consuming and labour-intensive but also subjective [
5]. Different platforms have been adopted to achieve automated pavement inspection, such as survey vans, mobile mapping systems (MMS), and unmanned aerial vehicles (UAVs). These platforms are often equipped with cameras, laser scanners, ground penetrating radar (GPR), and light detection and ranging (LiDAR) [
6,
7,
8].
Sealed cracks have received limited attention in the research domain. Few studies have specifically addressed detecting sealed cracks, and manual methods remain prevalent in engineering practices [
1]. Sun et al. [
9] enhanced the Faster R-CNN for identifying sealed crack bounding boxes. They employed a multi-model combination and multi-scale localization strategy to improve accuracy. Machine learning techniques have been employed to mitigate noise effects in crack detection by incorporating predefined feature extraction stages before model training. For example, Zhang et al. [
3] developed a T-DCNN pre-classification to categorize cracks and sealed cracks in pavement images relying on tensor voting curve detection. However, their approach had limitations in detecting fine cracks, i.e., the detected cracks suffered from background noise and discontinuities. More recently, Shang et al. [
1] proposed a sealed crack detection approach using multi-fusion U-net. The proposed approach outperformed seven state-of-the-art models, including U-net, SegNet, and DeepLabV3+. The achieved precision, recall, and F-measure were 79.64%, 91.59%, and 84.36%, respectively.
On the other hand, extensive research has delved into crack detection through various approaches and platforms. For example, Quintana et al. [
10] used a single linear camera mounted on a truck connected to a tracking device consisting of an odometer and a global positioning system (GPS) receiver to geo-localize the captured images. Image processing was accomplished using a crack classification computer vision algorithm. The precision and recall values were between 80% and 90%. In the work of Kang and Choi [
11], two 2D LiDAR units and a camera were used for pothole detection. The LiDAR data processing included noise reduction, clustering, line segment extraction, and gradient of data function. The video collected by the camera was processed through various stages, including brightness control, binarization, object extraction, noise filtering, and pothole detection. However, this approach processed the LiDAR and camera data separately and then combined the output to improve the results. Both [
12,
13] used the mobile laser scanning (MLS) system RIEGL VMX-450 for detecting asphalt pavement cracks, which is considered a high-cost system. In [
12], their approach for crack detection included ground point filtering, high-pass convolution, matched filtering, and finally, noise removal. They demonstrated that their proposed method could detect moderate to severe cracks (13–25 mm) in an urban road. In [
13], a semi-supervised 3D pavement crack detection algorithm was developed based on graph convolutional networks. The approach achieved 73.9% in recall and 71.9% in F-measure.
Recently, UAVs have been widely used in crack detection applications due to their versatility, low cost, and ability to be mounted with various sensors [
14]. Several studies have used UAV-based images to detect cracks using deep learning [
15,
16,
17,
18,
19,
20,
21]. For example, C. Feng et al. [
15] used UAV images to detect cracks on a dam surface using a deep convolution network. Chan et al. [
17] proposed a two-step deep learning method for the automated detection of façade cracks in building envelopes using UAV-captured images. Their approach, which involved a CNN model for classification and a U-Net model for segmentation, achieved high precision and recall. This, in turn, enhanced the reliability of detecting cracks and enabled comprehensive assessment of façade conditions for maintenance decisions. In [
18], UAV-based images were used to detect cracks for bridge inspection. Moreover, [
21] used UAV-based images for pothole recognition based on the You Only Look Once (YOLO) v4 classifier. They obtained roughly 90% crack classification accuracy. In [
19], a support vector machine (SVM) was adopted to identify cracks from aerial UAV RGB images. The images were then classified into two categories, namely cracks and non-cracks. Their proposed approach achieved a 97% classification accuracy.
They also showed that shadows in the images could potentially be misclassified as a crack. Y. Pan et al. [
22] compared three learning algorithms, namely SVM, artificial neural networks, and random forest (RF), to detect asphalt road pavement distress from multispectral images acquired by a UAV-based camera. They showed that RF has higher accuracy than the other two algorithms, with about 98% average accuracy.
Recently, computer vision and deep learning techniques have been effectively applied to automate crack classification and segmentation [
4,
23,
24,
25,
26,
27,
28,
29]. In particular, DCNN methods have shown better crack detection performance than traditional image processing methods [
30]. Crack classification DCNNs output labels for the input images, which indicate the class of the whole image (i.e., cracked, non-cracked, fatigue cracks). In [
4], a DCNN model that classified the input images into cracked and non-cracked was introduced. The model was composed of four convolutional layers, a maximum pooling layer, and finally, two fully connected layers. The precision and recall were approximately 86% and 92%, respectively. Li et al. [
31] classified 3D images of pavement cracks using four DCNNs into five classes, namely non-crack, transverse crack, longitudinal crack, block crack, and alligator crack. The overall accuracies of the four were above 94%.
Whereas an image is classified as one unit in image classification techniques, each pixel in the image is labelled in semantic segmentation. Both [
25,
26] used crack segmentation techniques for post-disaster assessment purposes. Wang et al. [
23] presented an innovative framework for automatic pixel-level tunnel crack detection using a combination of weakly supervised learning methods (WSL) and fully supervised learning methods (FSL). Their approach, which was validated on a large dataset, achieved an F-measure of 0.865. In [
32], a supervised DCNN was proposed to learn the crack structure from raw images. Their network architecture contained four convolutional, two max-pooling, and three fully connected layers. All segmentation metrics (i.e., precision, recall, and F-measure) were around 90%. A feature pyramid and hierarchical boosting network (FPHBN) for crack segmentation was proposed in [
33]. FPHBN was composed of four major components, namely bottom-up architecture, feature pyramid, side networks, and hierarchical boosting module. The bottom-up architecture was used for hierarchical feature extraction, while the feature pyramid was used for merging information to lower layers. The side networks were for deep supervision learning, and the hierarchical boosting module was to adjust sample weights. The authors created the CRACK500 dataset, which was divided into 1896 images for training data, 348 images for validation data, and 1124 images for test data. The network achieved an average intersection over union (AIU) of 48.9%. Both DeepCrack [
34] and the fast pavement crack detection network (FPCNet) [
35] utilized encoder–decoder architecture networks for crack segmentation. DeepCrack was trained on the collected dataset, which contained 260 images. The DeepCrack network reached an F-measure of over 87%. Meanwhile, FPCNet reached a 95% F-measure after being trained using the CFD dataset. The CFD dataset consisted of 118 images and was published in [
36]. Jenkins et al. [
37] proposed a DCNN based on U-net for crack segmentation. The U-net architecture was mainly composed of an encoder and a decoder [
38]. The network was tested on the CFD dataset. The results were 92%, 82%, and 87% for precision, recall and F-measure, respectively. In [
39], an enhanced U-net architecture was proposed, where the convolution blocks were replaced with residual blocks inspired by ResNet [
40]. The proposed network was evaluated using the CFD data set and CRACK500 dataset. On the CFD dataset, the proposed network achieved 97%, 94%, and 95% for precision, recall, and F-measure. While on challenging datasets such as CRACK500, it achieved 74%, 72%, and 73% for precision, recall, and F-measure. In both datasets, this approach marginally outperformed other methods.
The use of a vehicle equipped with a camera or a LiDAR sensor would potentially affect the traffic flow due to the low speed needed to capture high-quality images or dense point clouds. In addition, mapping a large area or a multi-lane road would be complex and inefficient. None of the UAV-based studies addressed the use of low-cost LiDAR data for crack segmentation. LiDAR can directly acquire geometry information of the pavement and is not affected by illumination conditions. However, the image-based methods might potentially obtain a higher accuracy when compared to it [
13].
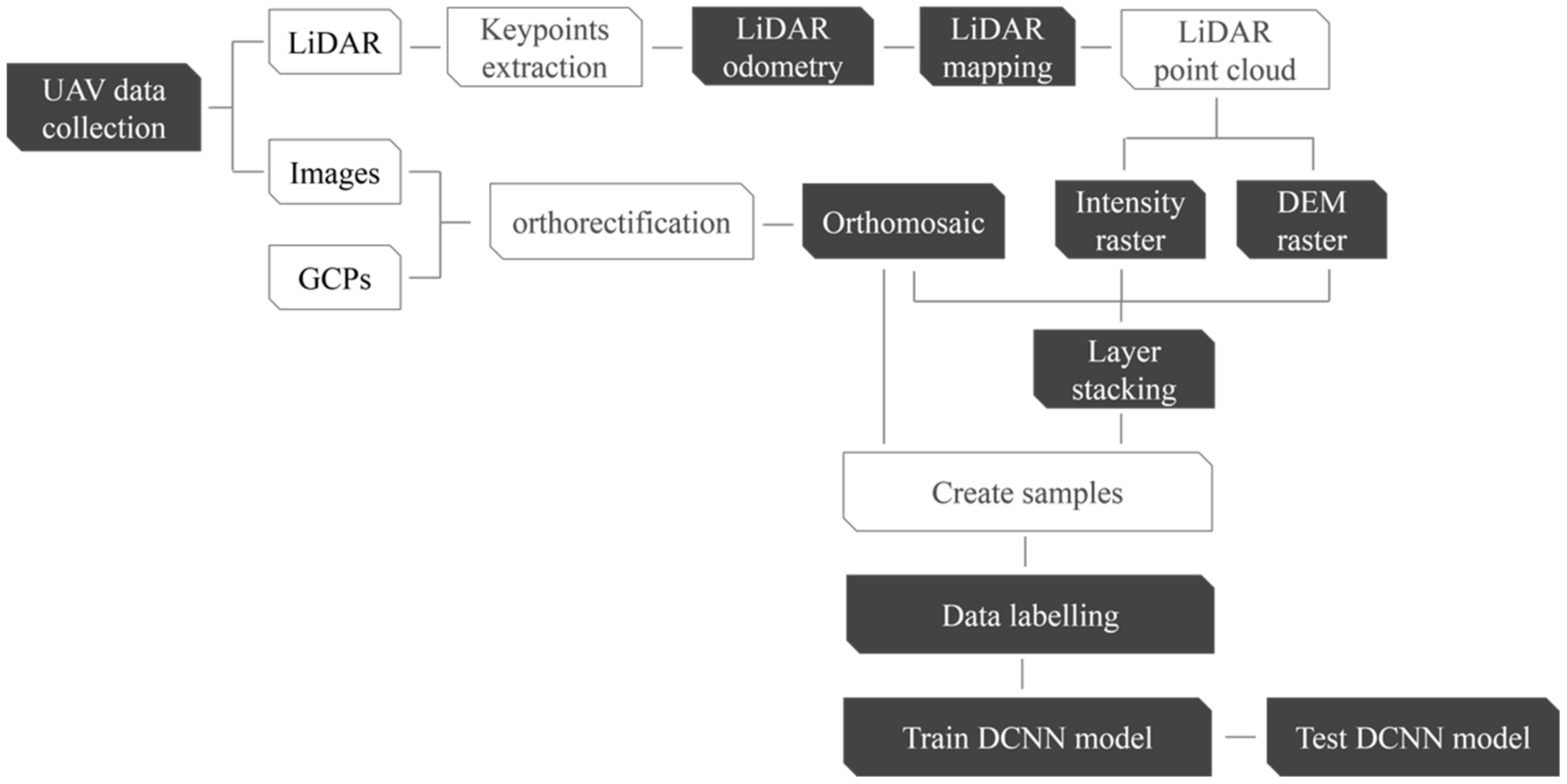
In this paper, a UAS-based RGB images and LiDAR data fusion model is developed using an enhanced version of the U-net for pavement crack segmentation. The network architecture is developed and pretrained, and its hyperparameters are tuned. Transfer learning is used to achieve more accurate segmentation results. Both mechanical and solid-state LiDAR sensors are considered in this study. Moreover, two different pavement distresses are investigated, namely cracks and sealed cracks. The remainder of this paper is organized as follows:
Section 2 introduces the proposed methodology, while
Section 3 discusses the adopted system, data collection, and data processing.
Section 4 presents the results, and finally,
Section 5 draws some conclusions about this research.
3. Data Collection and Preprocessing
Three data sets were collected in this study using two different UASs. In the first dataset, the UAS was a DJI Matrice 600 Pro with approximately 25 m flight height, with onboard sensors comprising a Sony α7R II RGB camera [
54], a Velodyne Puck mechanical LiDAR sensor [
55], and Applanix APX-15 GNSS/IMU board. For more details about the system and sensor configurations, the reader is referred to [
56]. The total number of collected points was about 14 million points. The number of acquired RGB images was 243 images. Twelve GCPs were established in the study area. The targets’ coordinates were precisely determined to the centimeter-level accuracy using a GNSS receiver operating in real-time kinematic (RTK) mode. Using Pix4D mapper software, four GCPs were used to rectify the images in order to generate a georeferenced orthomosaic image, while the remaining GCPs were used as checkpoints.
Figure 4 [
56] presents the georeferenced orthomosaic image.
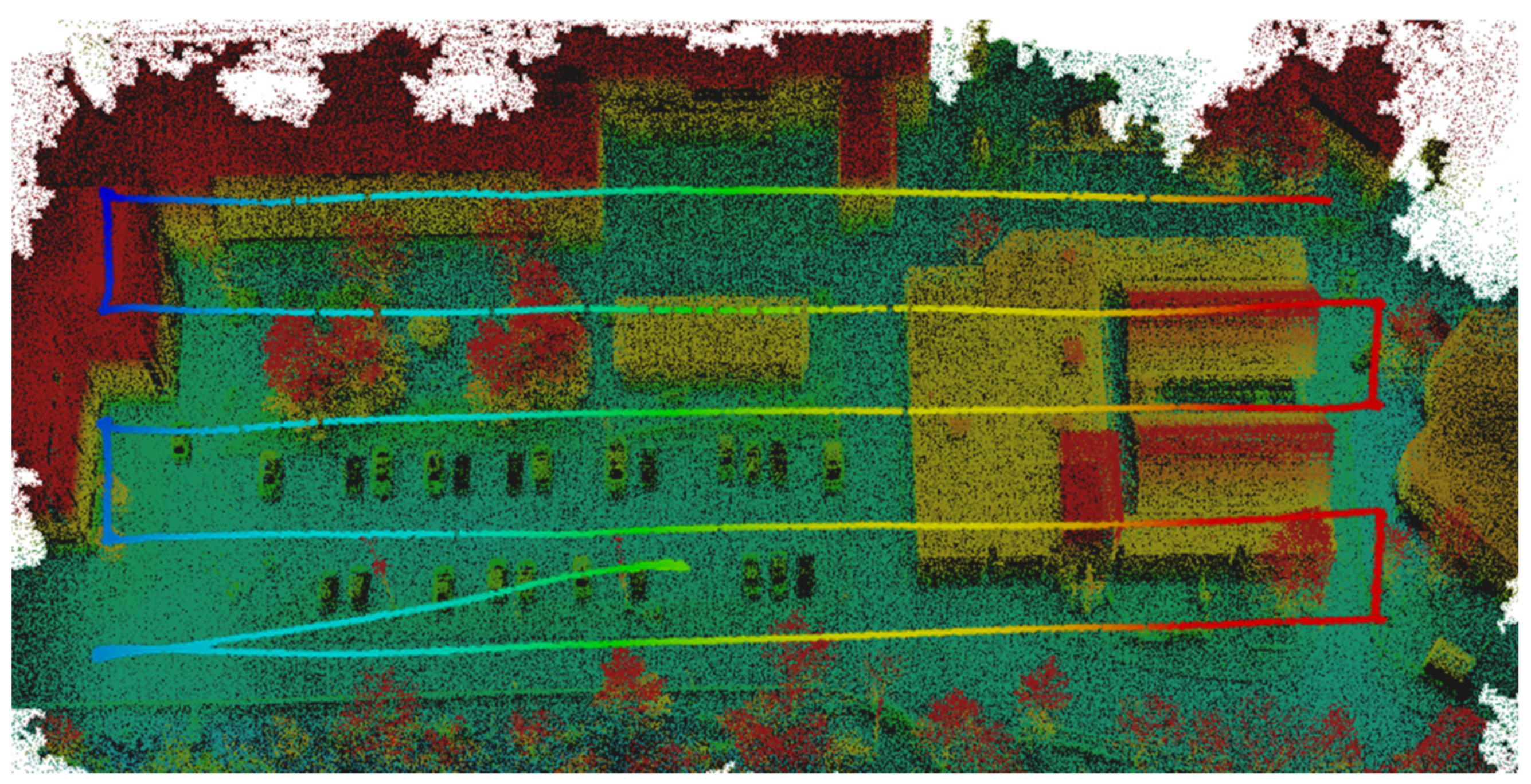
The optimized LOAM SLAM algorithm was implemented to process the LiDAR data. The SLAM trajectory and the created point cloud are presented in
Figure 5 and
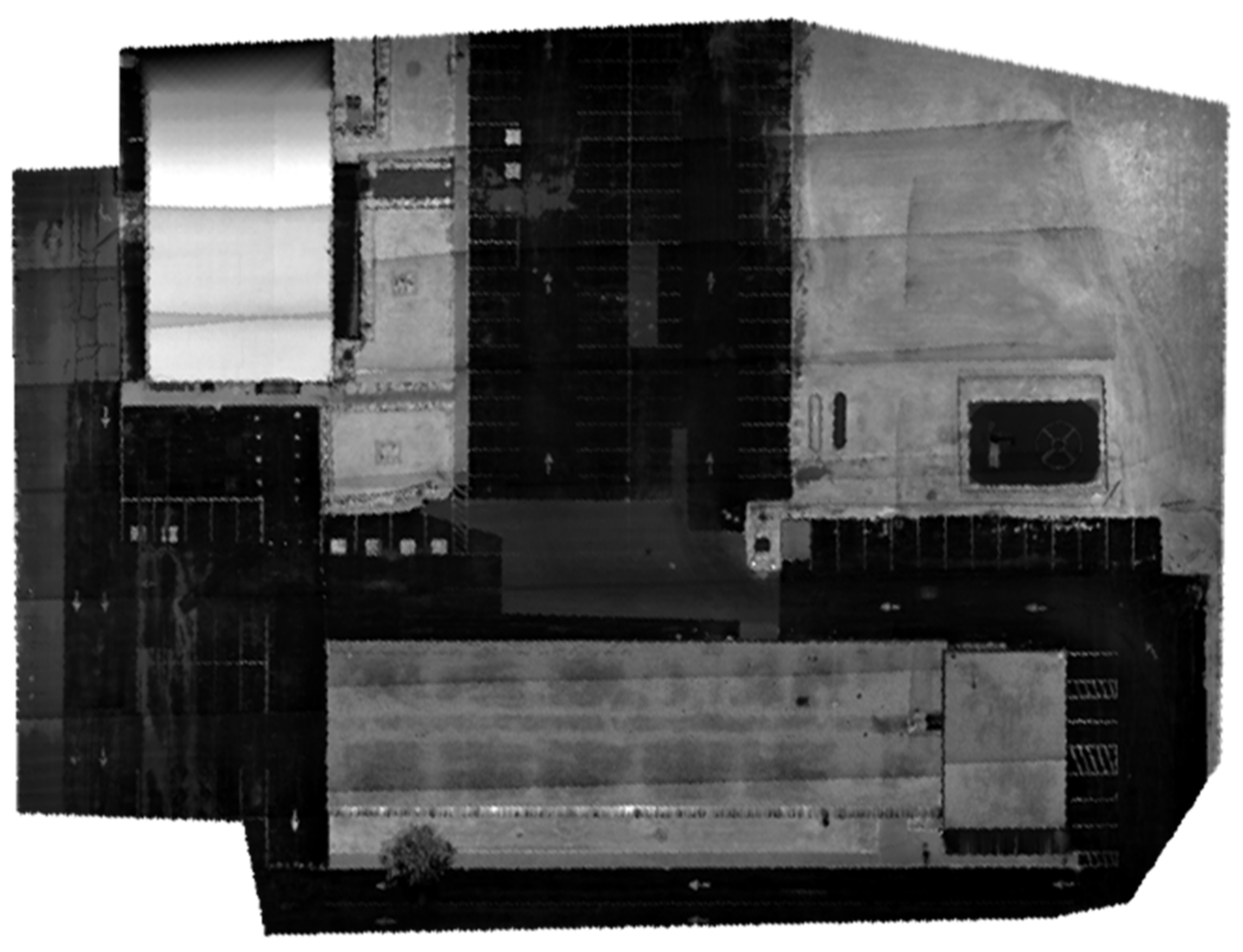
Figure 6, respectively. The LiDAR point cloud was georeferenced using the GCPs and then processed to create a digital elevation model (DEM) and intensity rasters using ArcGIS software, as shown in
Figure 7 and
Figure 8, respectively [
56].
The second and third datasets were acquired using a DJI Matrice 300 RTK UAV equipped with a Zenmuse L1 system. The latter integrates a Livox solid-state LiDAR, an IMU, a GNSS receiver, and an RGB camera [
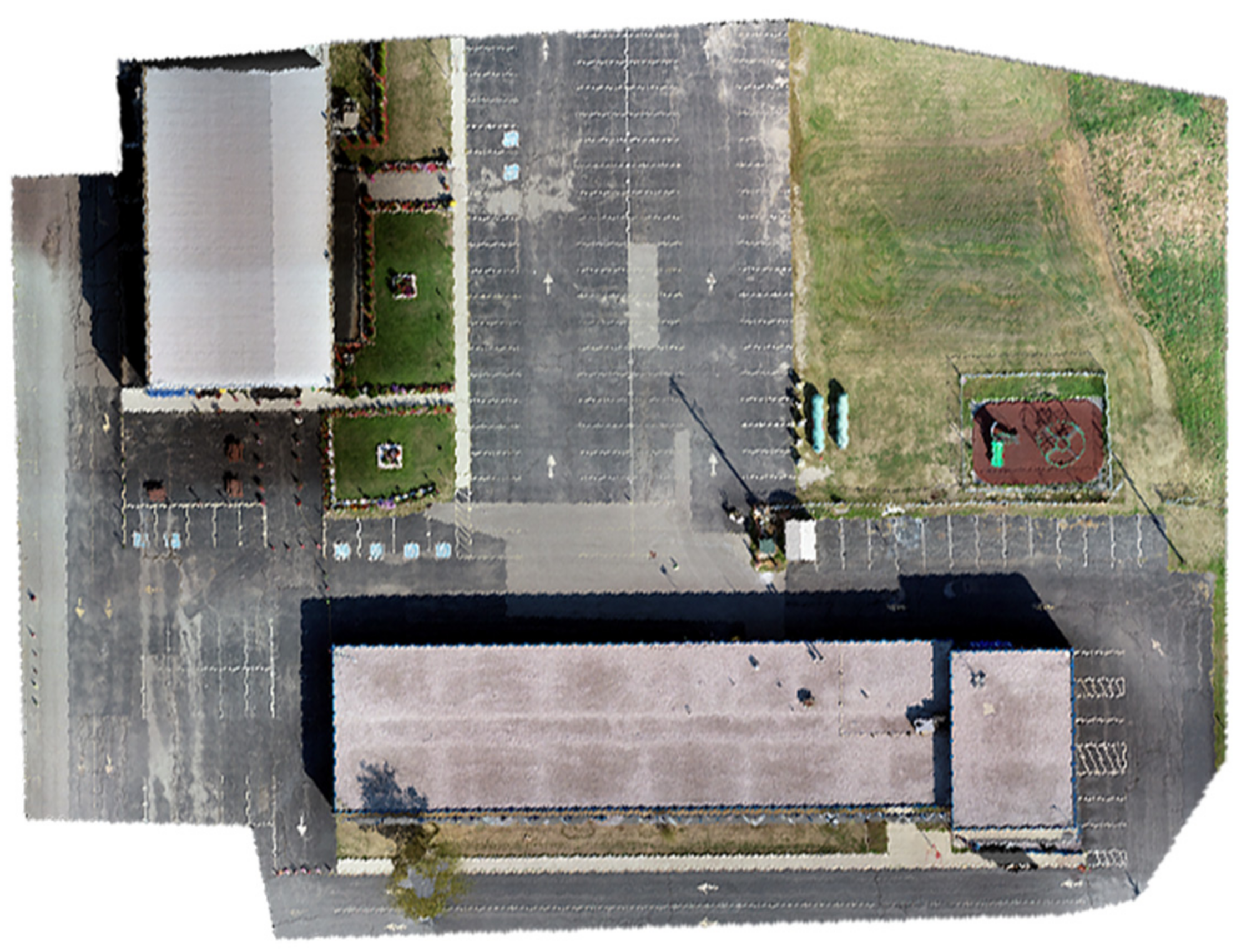
57]. The second dataset was acquired at a flight altitude of 25 m, while the third dataset was obtained at an altitude of 19 m. This deliberate variation in flight height was undertaken in order to evaluate the impact of elevation on the accuracy of crack segmentation. For the second dataset, the total number of collected points using the solid-state LiDAR was about 123 million, and the number of acquired images was 224 using the RGB camera. In the third dataset case, approximately 340 million points were gathered through the solid-state LiDAR, accompanied by the acquisition of 548 images using the RGB camera. For both datasets, the precise drone path was determined to centimeter-level accuracy using GNSS RTK, which was used to georeference the collected data. Similar to the first case study, the geotagged images were processed to form a georeferenced orthomosaic image, as presented in
Figure 9 and
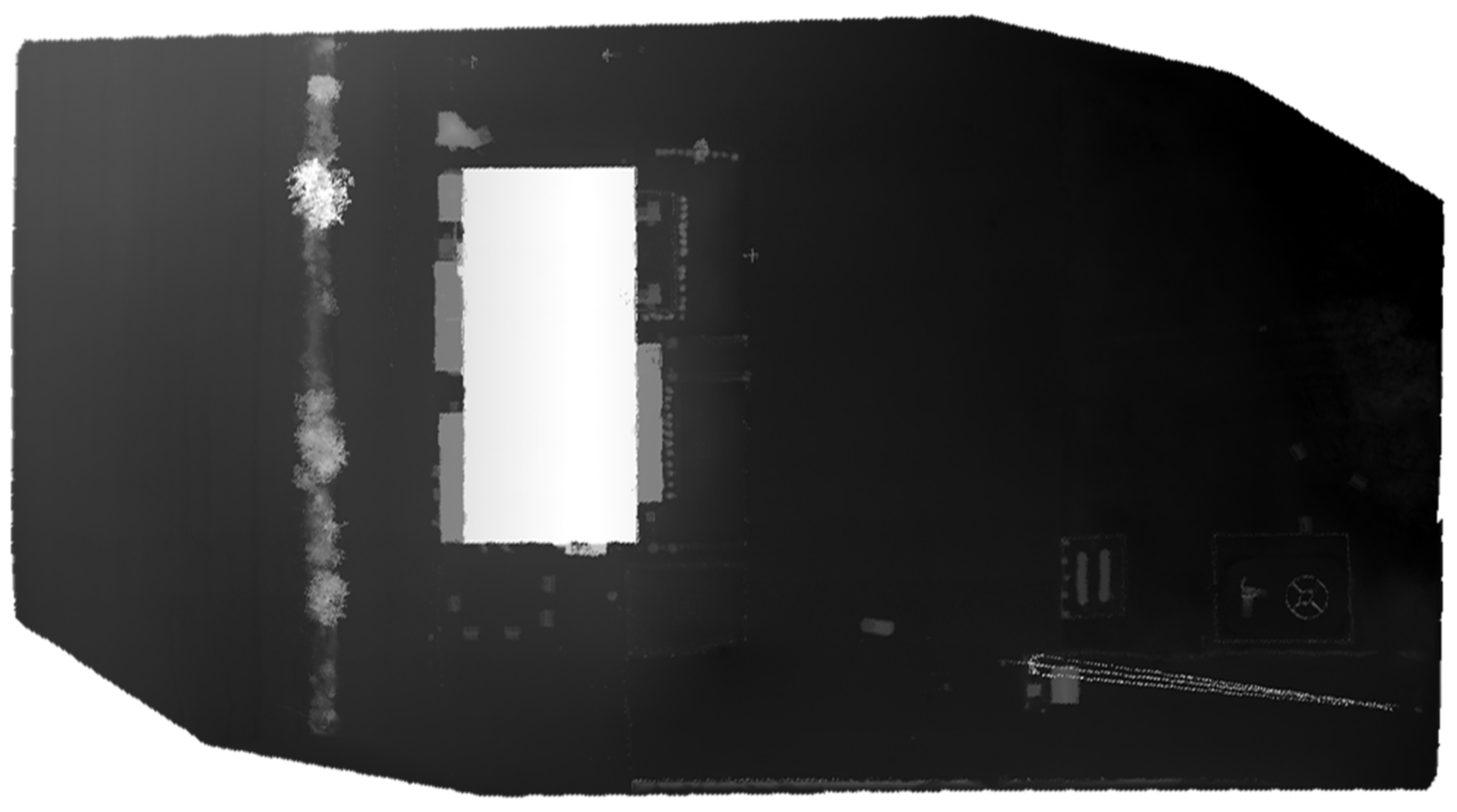
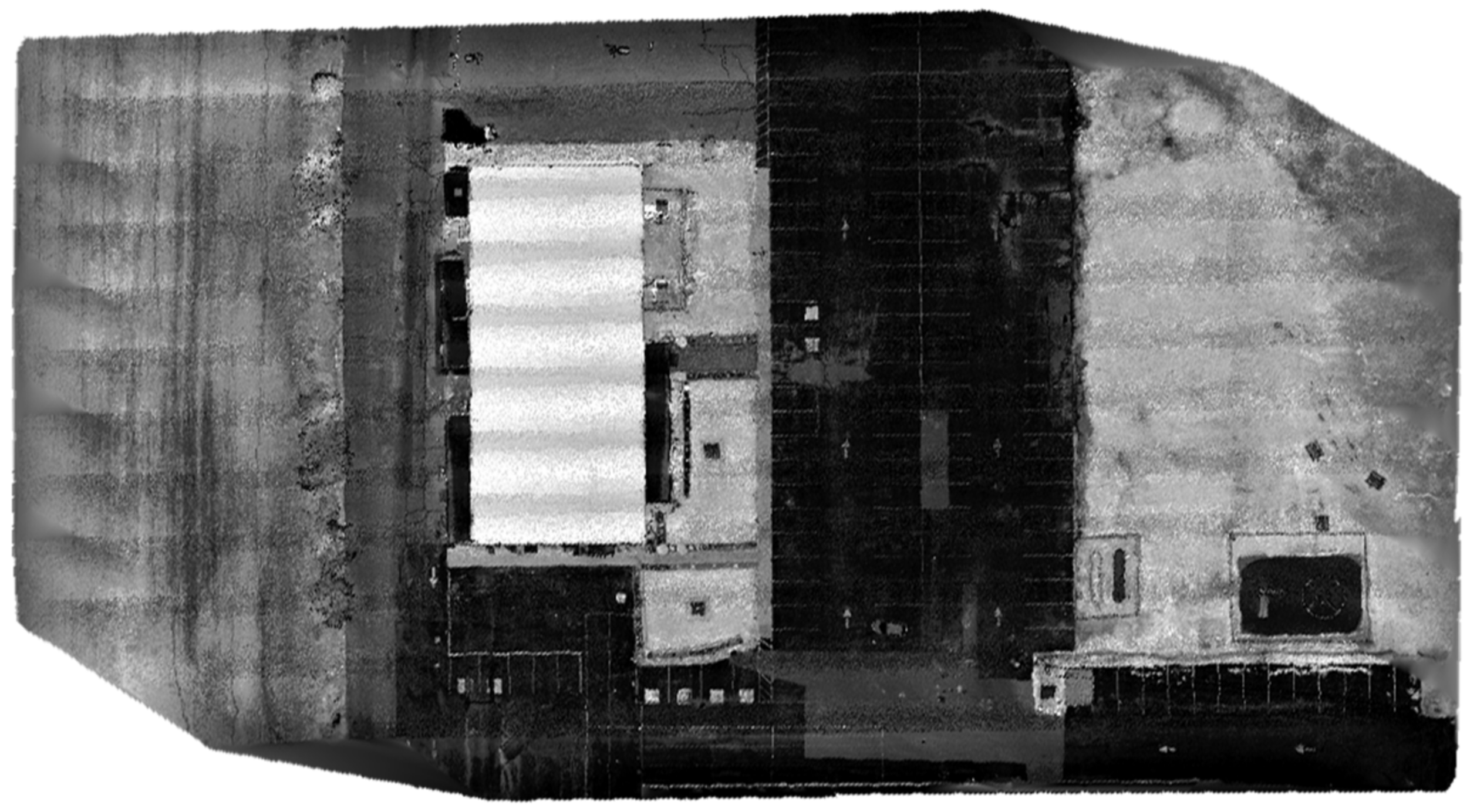
Figure 10 for the second and third datasets, respectively. The solid-state LiDAR data were processed using the DJI Terra software to generate a georeferenced point cloud of the study area. Then, similar to the first dataset, ArcGIS software was utilized to process the point cloud to generate DEM and intensity rasters, as shown in
Figure 11,
Figure 12,
Figure 13 and
Figure 14 for the second and third datasets, respectively.
Four imaging/LiDAR combinations were considered for the three datasets, namely RGB, RGB + intensity, RGB + elevation, and RGB + intensity + elevation. The first case (RGB) featured the use of the colored orthomosaic image. The second case (RGB + intensity) stacked the intensity and orthomosaic image using ERDAS IMAGINE software [
58]. In the third case (RGB + elevation), the elevation raster was stacked to the RGB orthomosaic image as a fourth channel. In contrast, in the fourth case (RGB + intensity + elevation), the intensity, elevation, and the orthomosaic image were stacked.
To train the model, 24 crack samples of the first dataset were formulated as subset images of each of the four combinations. For the second and the third datasets, two types of pavement distress were detected, namely cracks and sealed cracks. Similar to the first dataset, subset images for each of these categories were created for each of the four combinations. A total of 20 sample images were created for each category of cracks and sealed cracks in the second dataset, and 30 images were generated for each category in the third dataset. The samples from each dataset were divided into training, validation, and testing sets, as illustrated in
Table 1. The training sets were employed to train the DCNN, and the validation sets were used to fine-tune the model’s performance during training. It was ensured that the model had no prior exposure to the testing sets throughout the training process. The testing sets were employed exclusively to assess the model’s performance. The used testing sets exhibit a wide range of characteristics, including variations in crack shape, orientation, and background details, which differ significantly from the training and validation sets. This diversity serves to rigorously evaluate the model’s capacity to generalize across various features and real-world conditions.
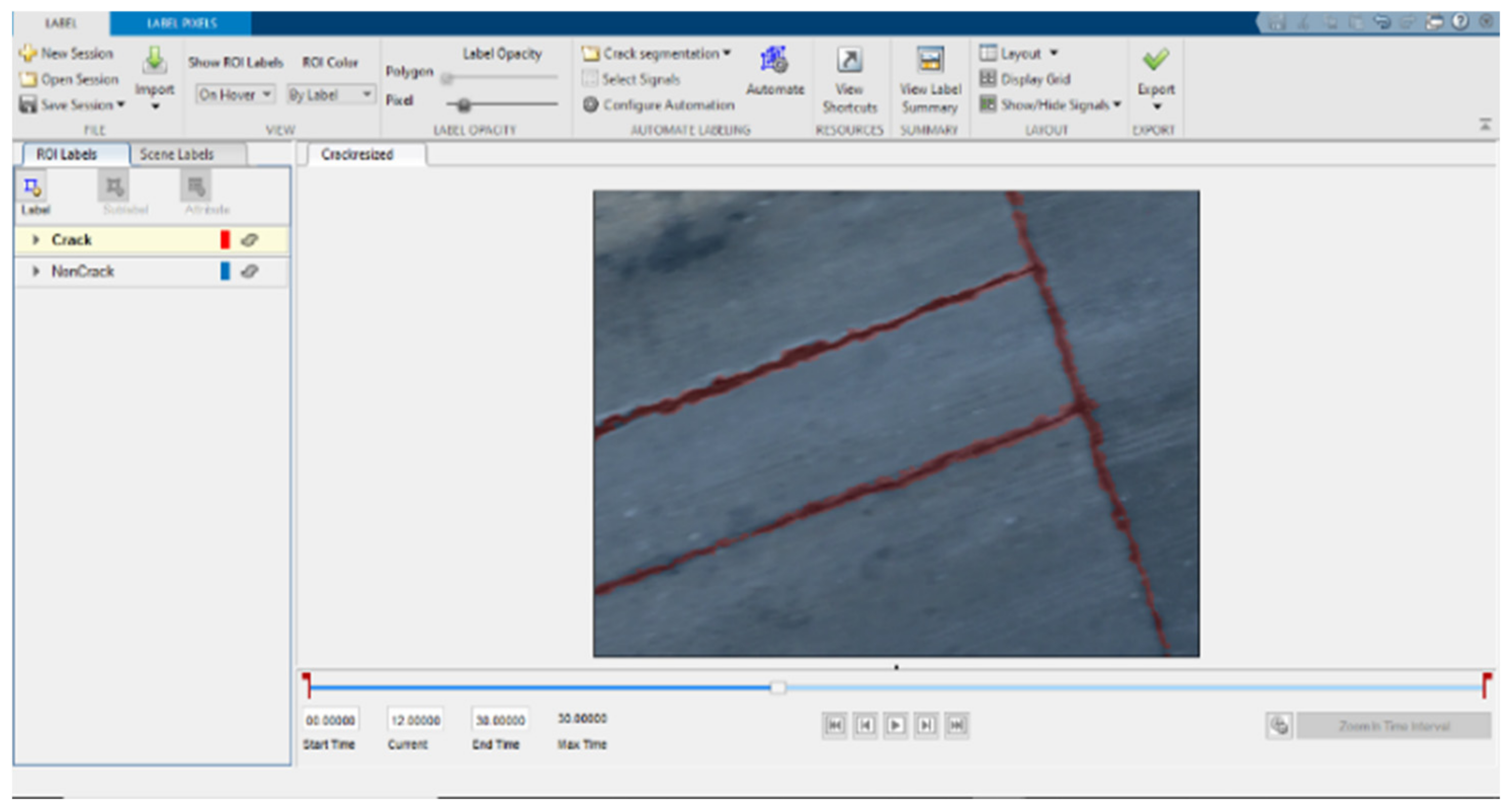
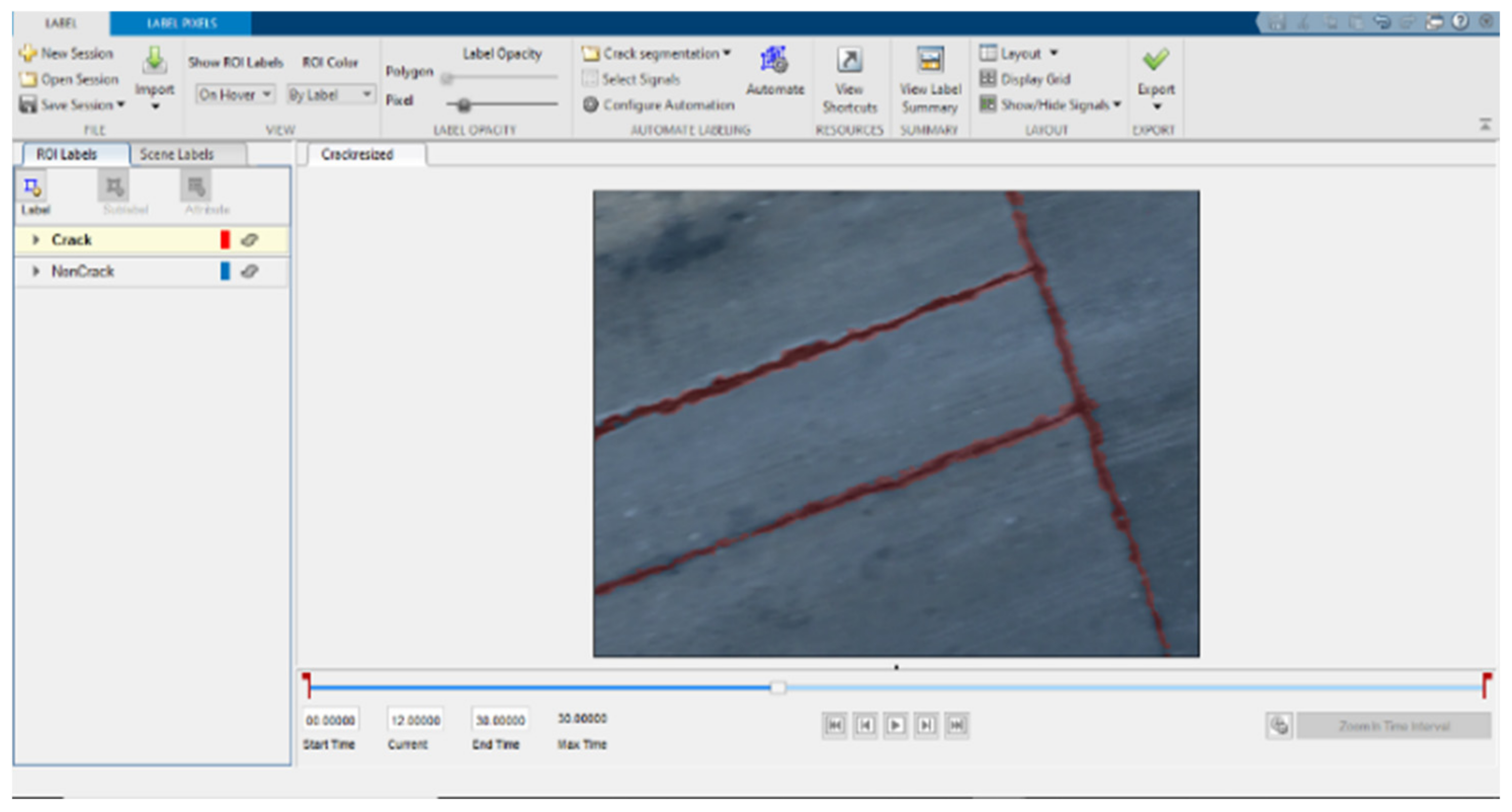
The targeted pavement distress grade in this research is moderate to severe distress (13–25 mm). To enhance the efficiency of the data labelling operation, a two-step automated ground truth labelling process was implemented using Matlab’s ground truth labeller [
59]. In the first step, automatic ground truth labelling was performed using a pre-trained semantic segmentation algorithm, specifically DeeplabV3 [
60], with ResNet as the base network, ensuring precise crack detection across images. The second step involved a manual verification process, allowing for minor manual adjustments. This manual review ensured the accuracy and reliability of the generated ground truth data.
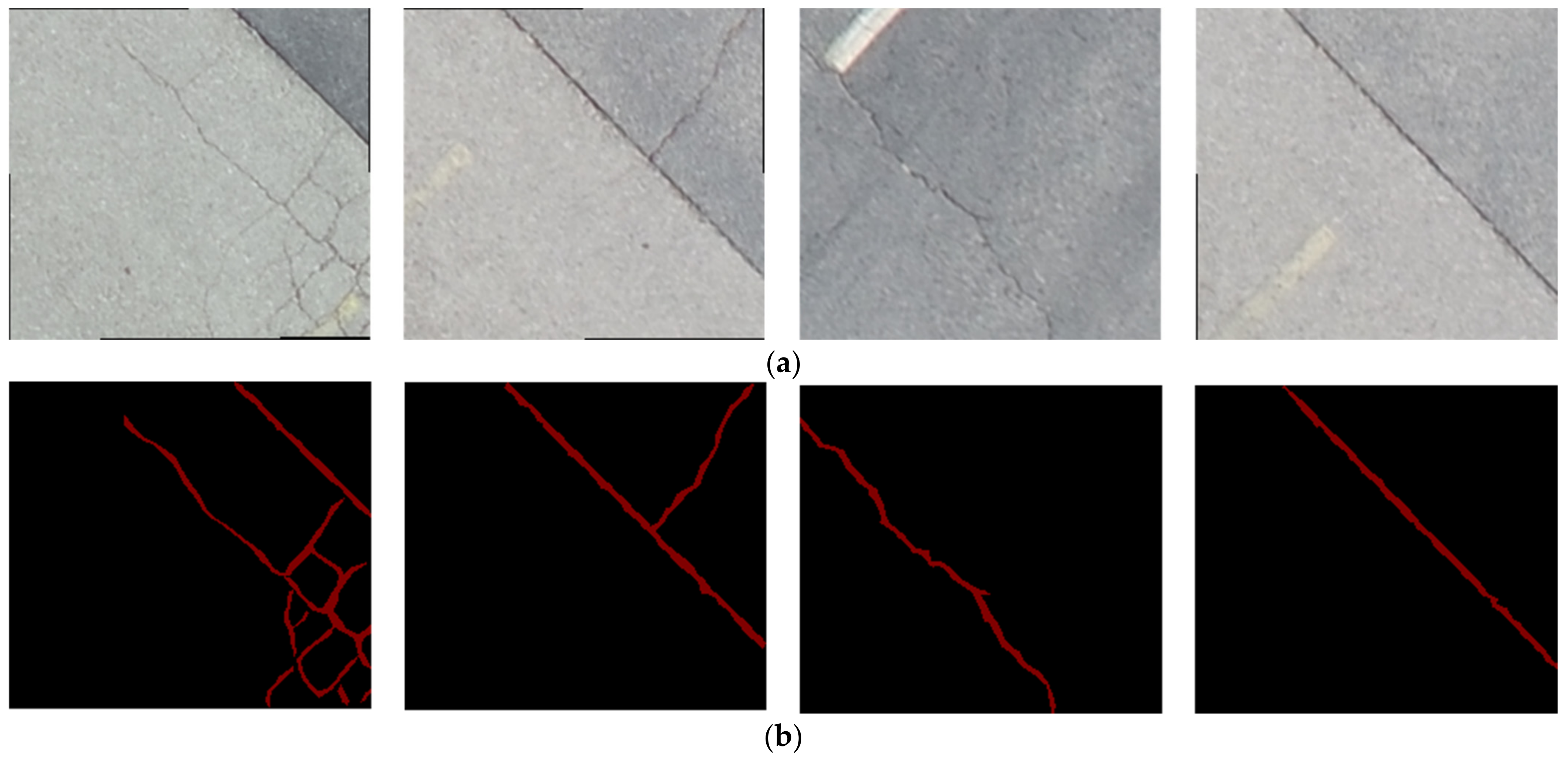
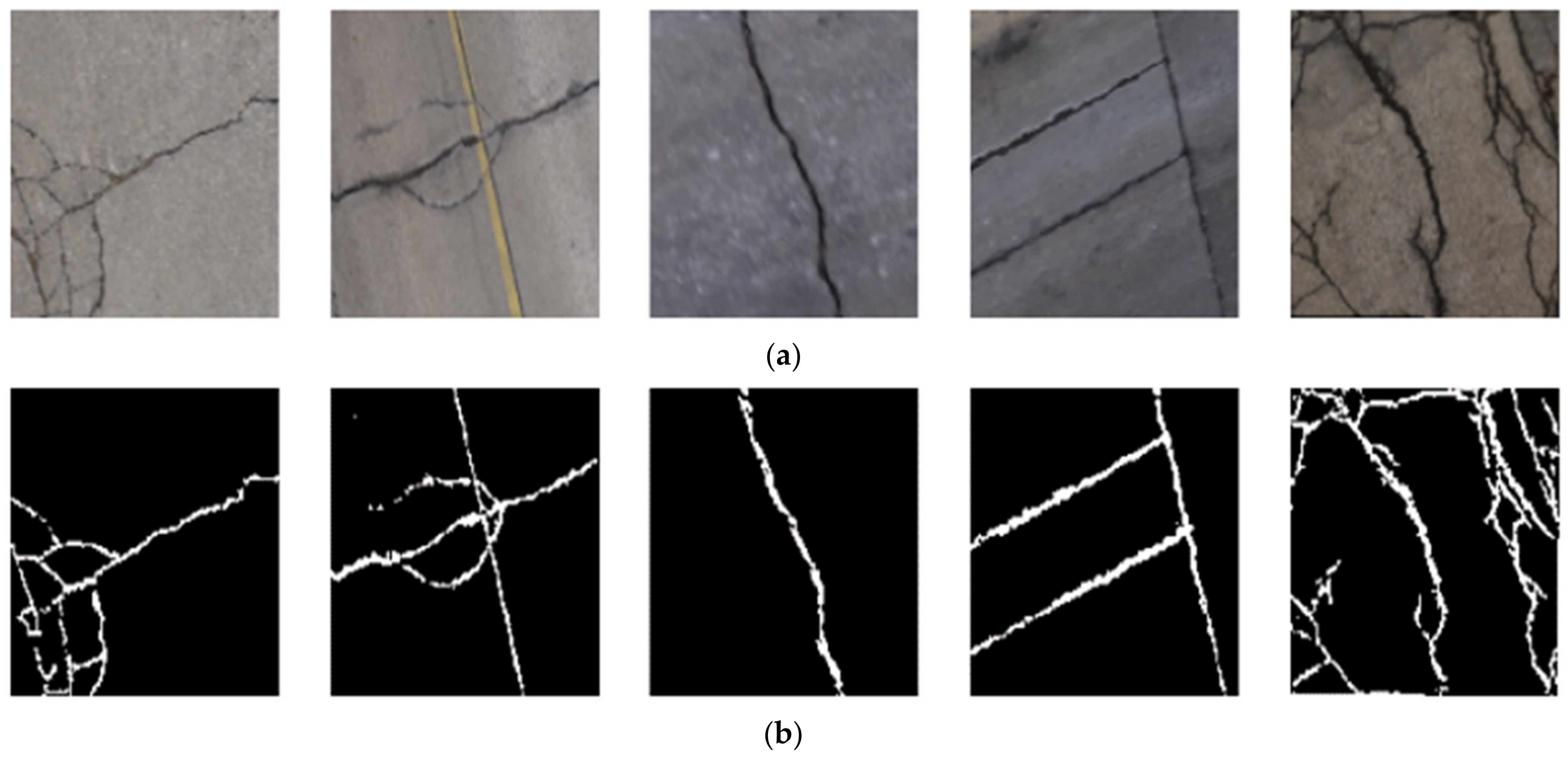
Figure 15 illustrates the process of labelling crack pixels using Matlab. The collected pavement distresses were challenging due to their different types and shapes and complex textures, including irregular patterns, shadows, or surface imperfections. Additionally, blurred backgrounds can pose challenges because the boundaries of cracks might not be distinct. Examples of pavement crack images of the first, second, and third datasets and their ground truth are presented in
Figure 16,
Figure 17 and
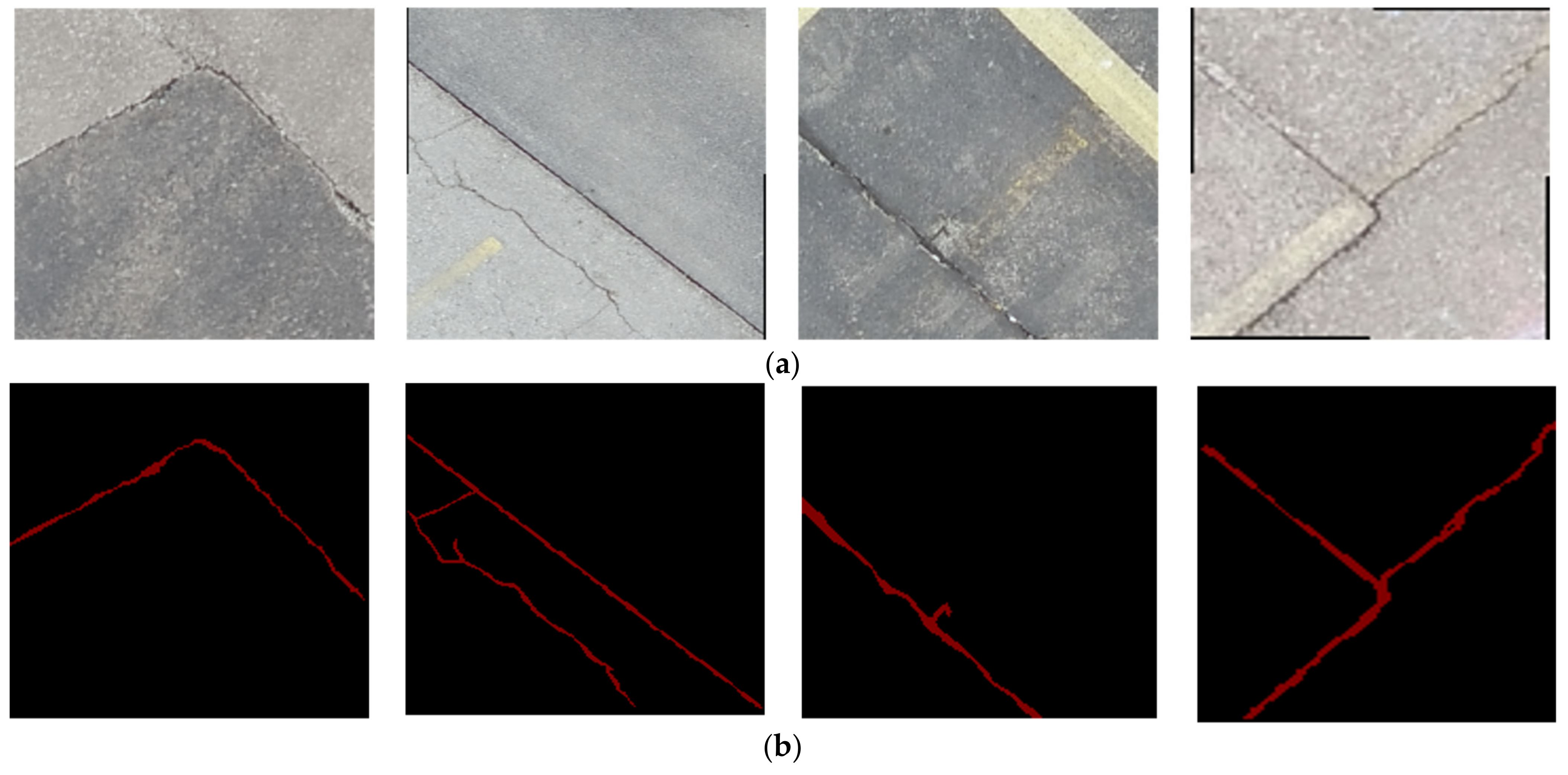
Figure 18, respectively. Examples of the sealed crack images of the second and third datasets are shown in
Figure 19 and
Figure 20, respectively.
4. Results and Discussion
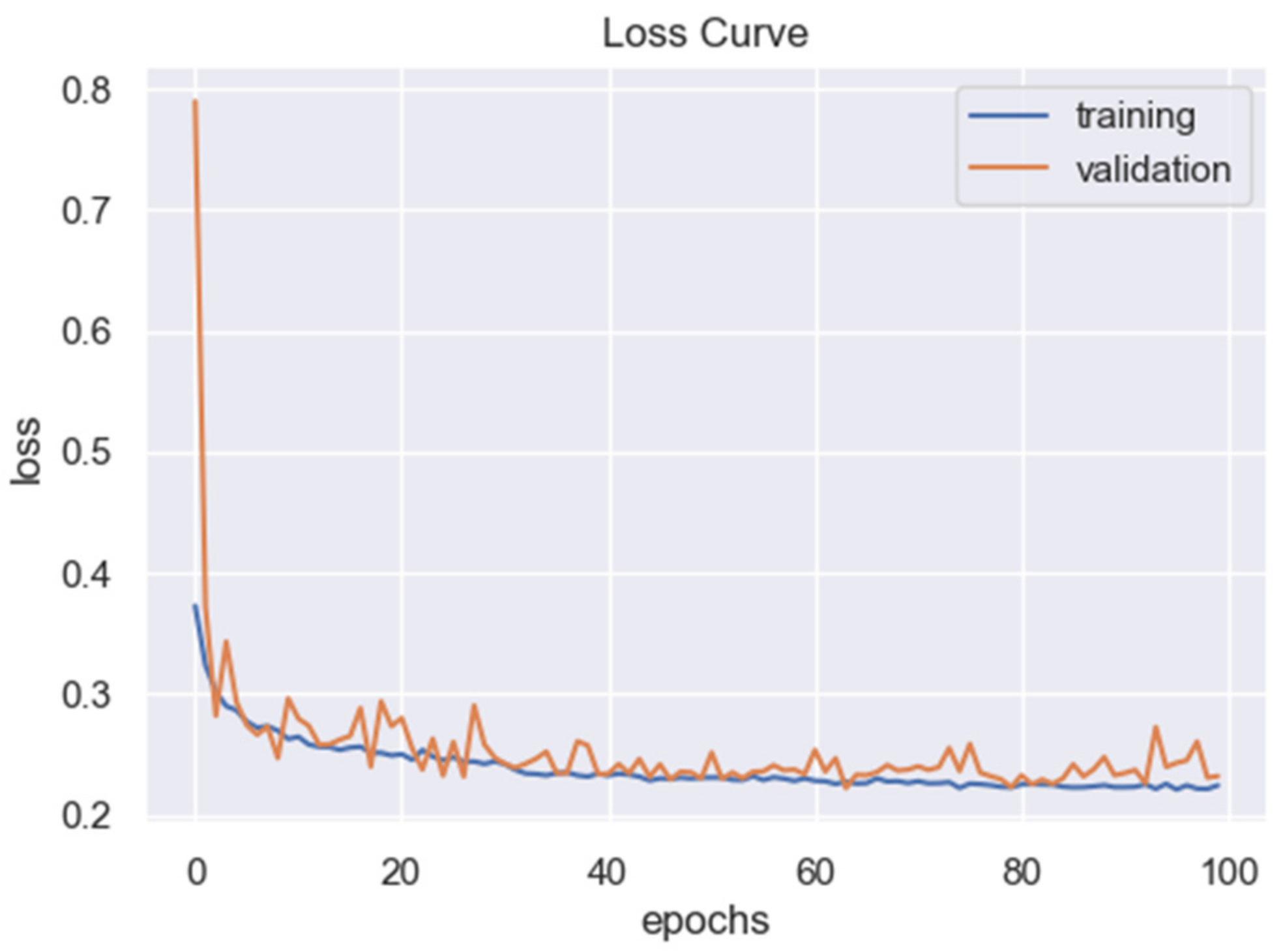
The obtained segmentation accuracy was relatively low after training the network on the first dataset. This is mainly due to the limited size of the data. For example, the achieved precision, recall, and F-measure were 63%, 79%, and 70% in the RGB case, respectively. Therefore, to optimize the weights of the network and increase the segmentation accuracy, the CRACK500 dataset was used to pretrain the network. The training and validating loss curves are shown in
Figure 21, and the precision, recall, and F-measure achieved by training the network on the CRACK500 dataset are presented in
Table 2. After optimizing the network of the segmentation network, the pavement crack segmentation accuracy of the model was improved by about 10%. Before testing the network on the collected datasets, our model was compared with the U-net model [
38] and the FPHBN model [
33] using the RGB case of the first dataset. Our network outperformed both networks, as shown in
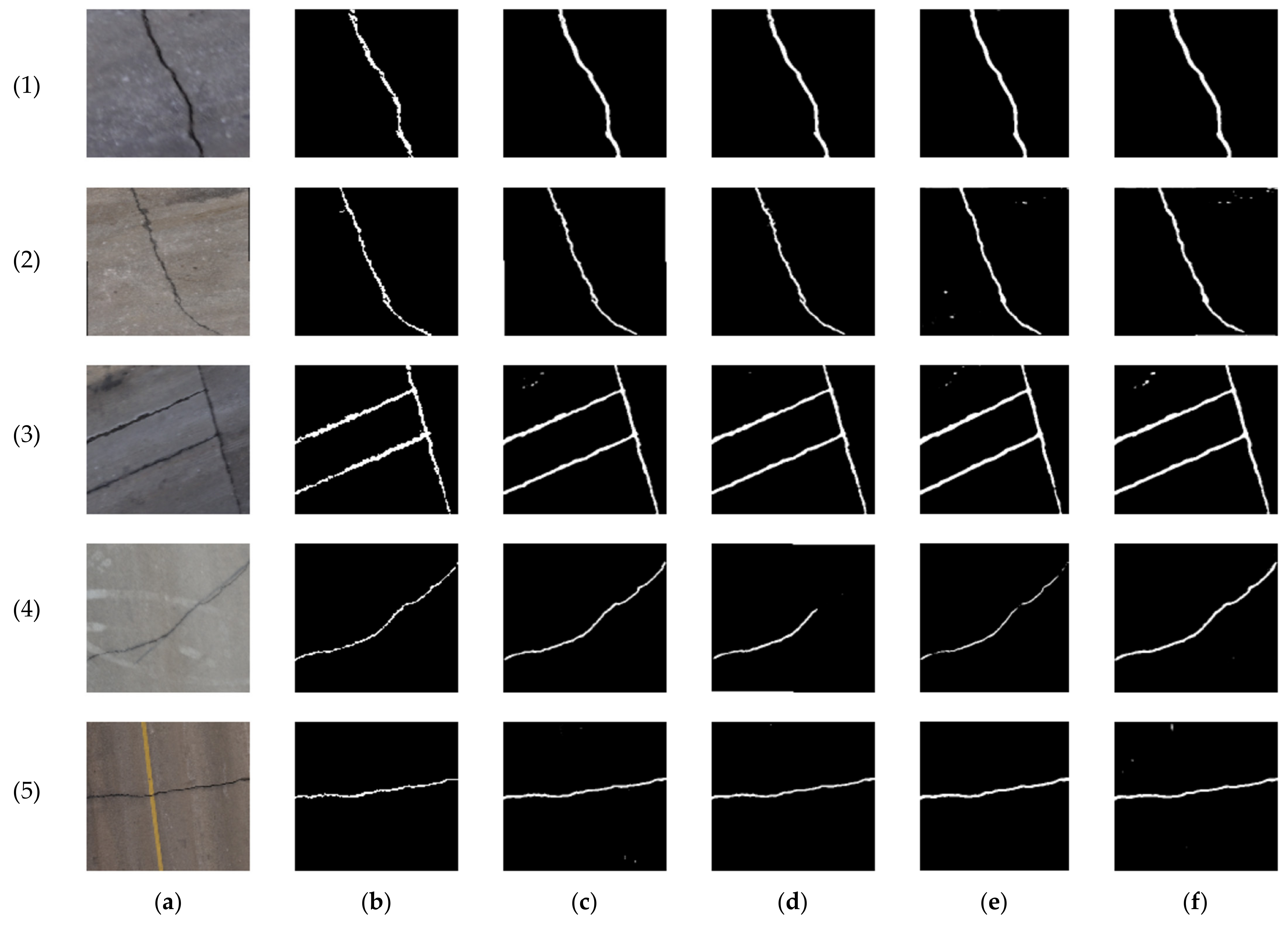
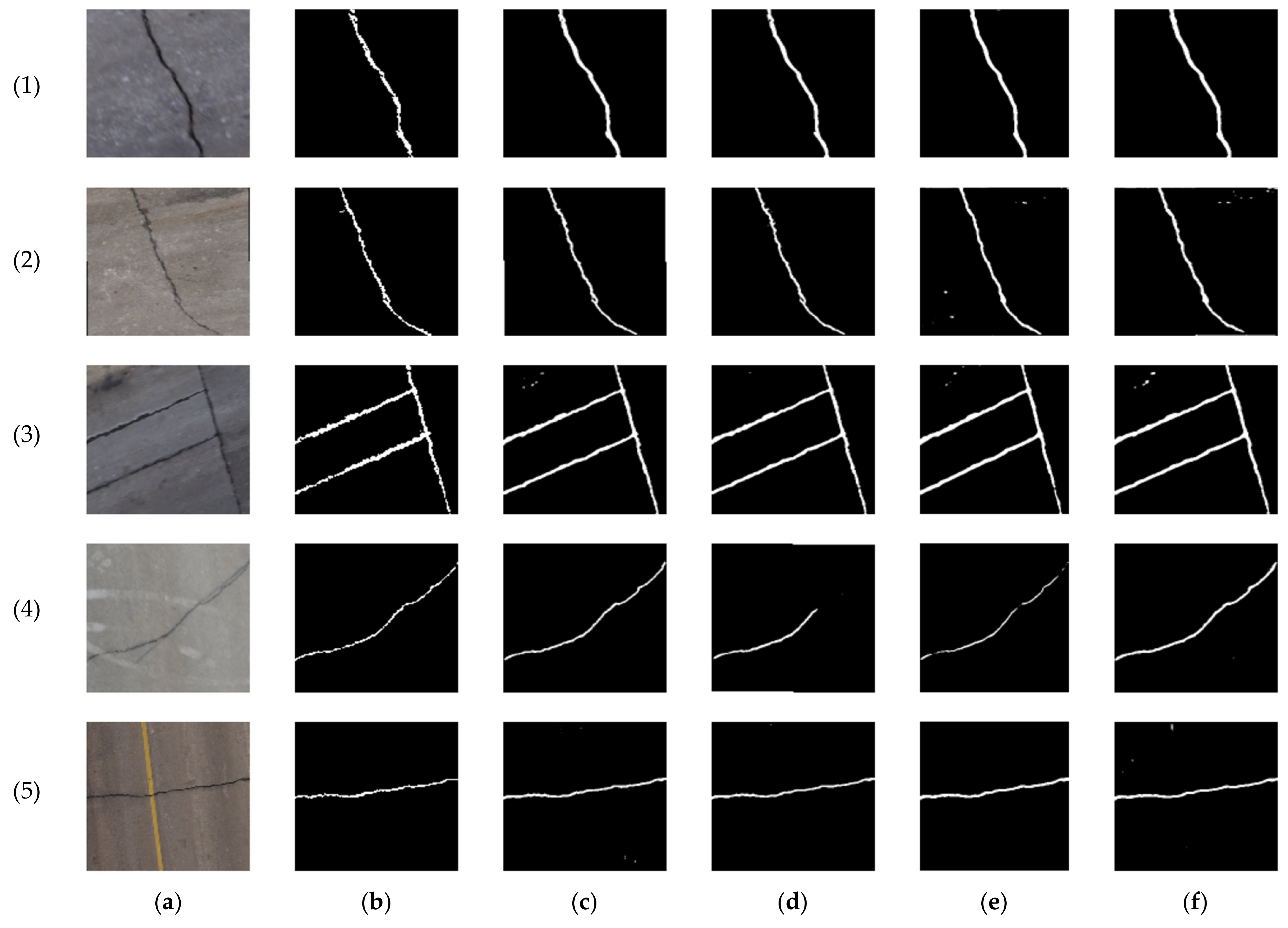
Table 3.
Figure 22 shows the predictions of the testing dataset for the three networks. It is noticeable that both U-net and FPHBN networks have some misclassifications of the pavement pixels as cracks. In addition, the FPHBN misclassified the shadow and the pavement marking as cracks in images 4 and 5, respectively.
Thereafter, the transfer learning technique was applied to train the network on the four combinations of the collected datasets. The RGB case serves as the baseline for all comparisons, allowing for an assessment of the enhancements in crack segmentation resulting from the incorporation of LiDAR data in comparison to image analysis alone. For the first dataset crack samples, as shown in
Table 4, the achieved precision, recall, and F-measure in the RGB case were 77.48%, 87.66%, and 82.26%, respectively. In an attempt to improve the network performance, the LiDAR intensity layer was added to the RGB to formulate the RGB + intensity combination. The latter yielded a reduction of approximately 2%, 8%, and 5% in the precision, recall, and F-measure, respectively, in comparison with the RGB case. Instead, the elevation layer was added to the RGB to create the RGB + elevation combination. Through this combination, the obtained precision, recall, and F-measure were 72.41%, 89.00%, and 73.37%, respectively. Finally, both intensity and elevation layers were combined with the RGB to formulate RGB + intensity + elevation. Through this combination, the precision and F-measure were decreased by 6% and 4%, respectively, compared to the RGB case. The predictions of the testing dataset of the four different combinations for the crack samples of the first dataset are shown in
Figure 23.
The second dataset crack samples obtained similar results as shown in
Table 5, where adding the intensity layer to the RGB decreased precision, recall, and F-measure by 11%, 2%, and 7%, respectively, in comparison with the RGB case. While adding the elevation increased the recall by about 2%, the RGB + intensity + elevation combination decreased the precision and F-measure by 10% and 5%. The increase in the recall value in the RGB + elevation combination for both datasets means that more crack details were detected by the network when geometric information represented in the elevation was added to the RGB images. In addition, some background pixels, such as stains, were classified as a crack in the third test image of the first dataset, showing the importance of adding geometric (depth) information to the images to avoid such confusion. The lower precision indicates that the network tends to misclassify background pixels as cracks. This is graphically noticeable, as shown in
Figure 23 and
Figure 24, where the predicted crack is thicker than its counterpart in the ground truth.
For the sealed crack, considering the RGB case, the obtained precision, recall, and F-measure were 90.17%, 80.07%, and 84.82%, respectively, as shown in
Table 6. Adding the intensity layer to the RGB and formulating the RGB + intensity combination improved the precision, recall, and F-measure by about 3%. As a substitute, the elevation layer was added to the RGB to create the RGB + elevation combination. Through this combination, the precision and F-measure were slightly improved compared to the RGB + intensity combination. Finally, by adding both the intensity and elevation layers to the RGB formulating the RGB + intensity + elevation combination, the precision was increased by 2%, and both the recall and F-measure were increased by 4% in comparison with the RGB case. Such an increase emphasizes the importance of image/LiDAR fusion, which helps mitigate the effects of shadows, as shown in the sealed crack images in
Figure 25.
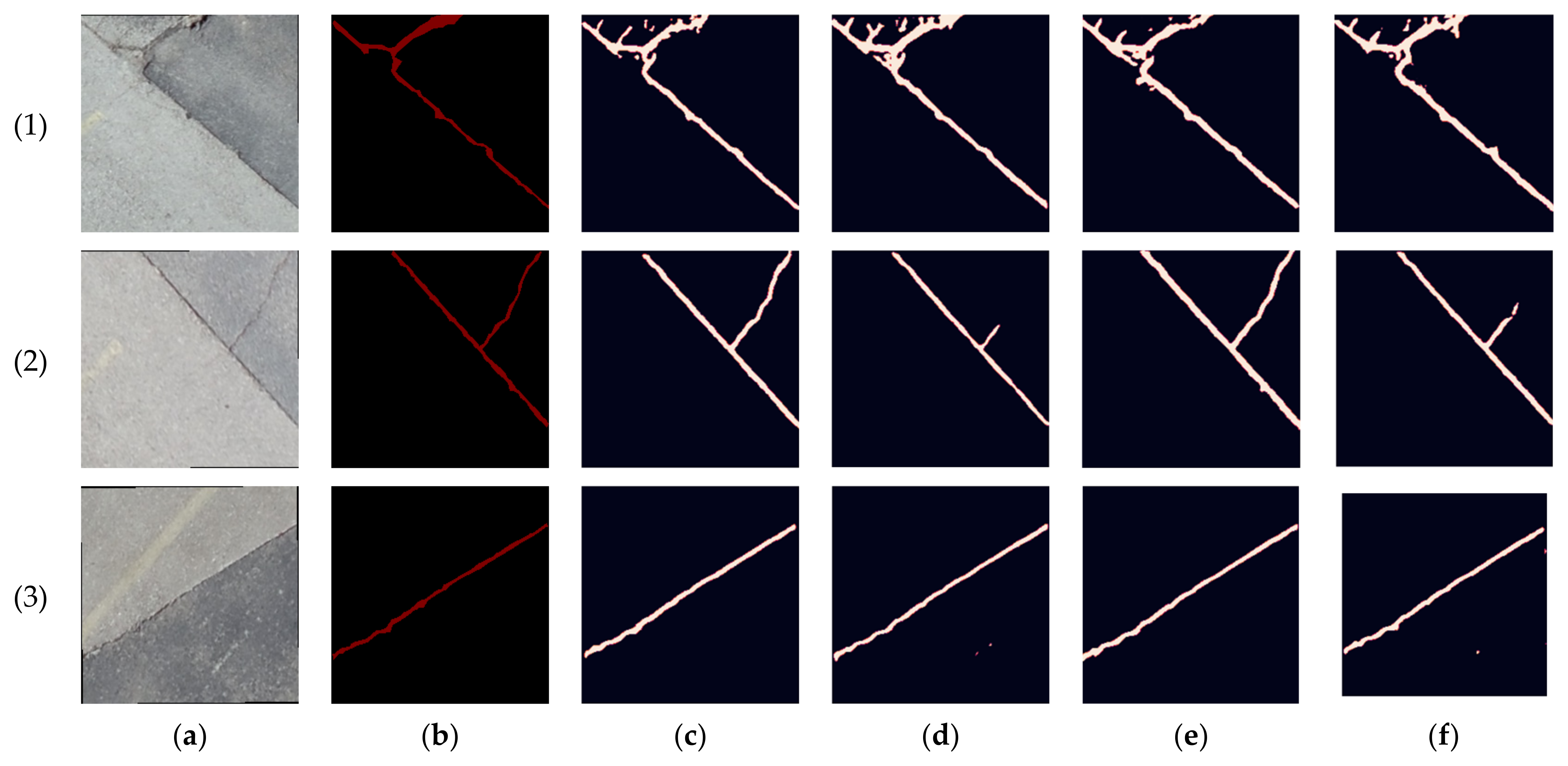
In the third dataset, a lower flight height was investigated in order to capture higher-resolution data. Notably, as shown in
Table 7, the segmentation performance of crack samples in the third dataset exhibited a slight improvement compared to the second dataset. In the RGB scenario, precision, recall, and F-measure increased by 1–2% in comparison with the RGB case of the second dataset. In contrast to the second dataset, incorporating the intensity layer with RGB in the third dataset facilitated the capture of finer crack details, leading to a notable 2% increase in recall in comparison with the RGB case. This enhancement is visually demonstrated in images 5 and 6 (
Figure 26). Furthermore, adding the elevation to the RGB led to an even higher recall improvement of about 4% compared to the RGB case. However, in both RGB + intensity and RGB + elevation cases, there was a decrease in precision by 3% and 2%, respectively, compared to the RGB case. This reduction was attributed to either misclassification, as seen in image 2 (
Figure 26), or the predicted crack being thicker than the actual crack in the ground truth. Nonetheless, it is noteworthy that the reduction in precision was considerably less than that of the second dataset, where the reduction reached 10%. This difference highlights the significantly enhanced LiDAR data resolution in this particular case.
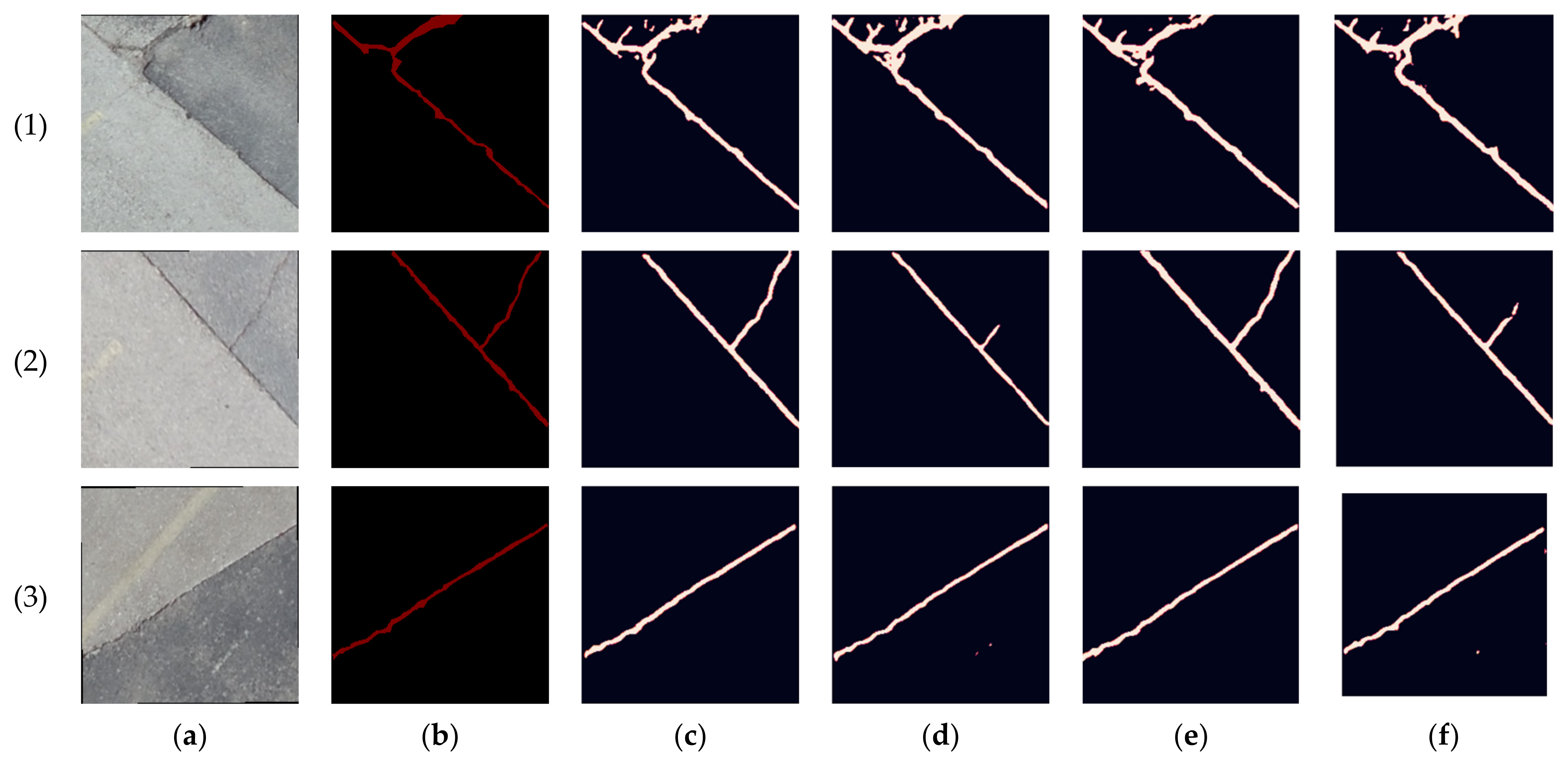
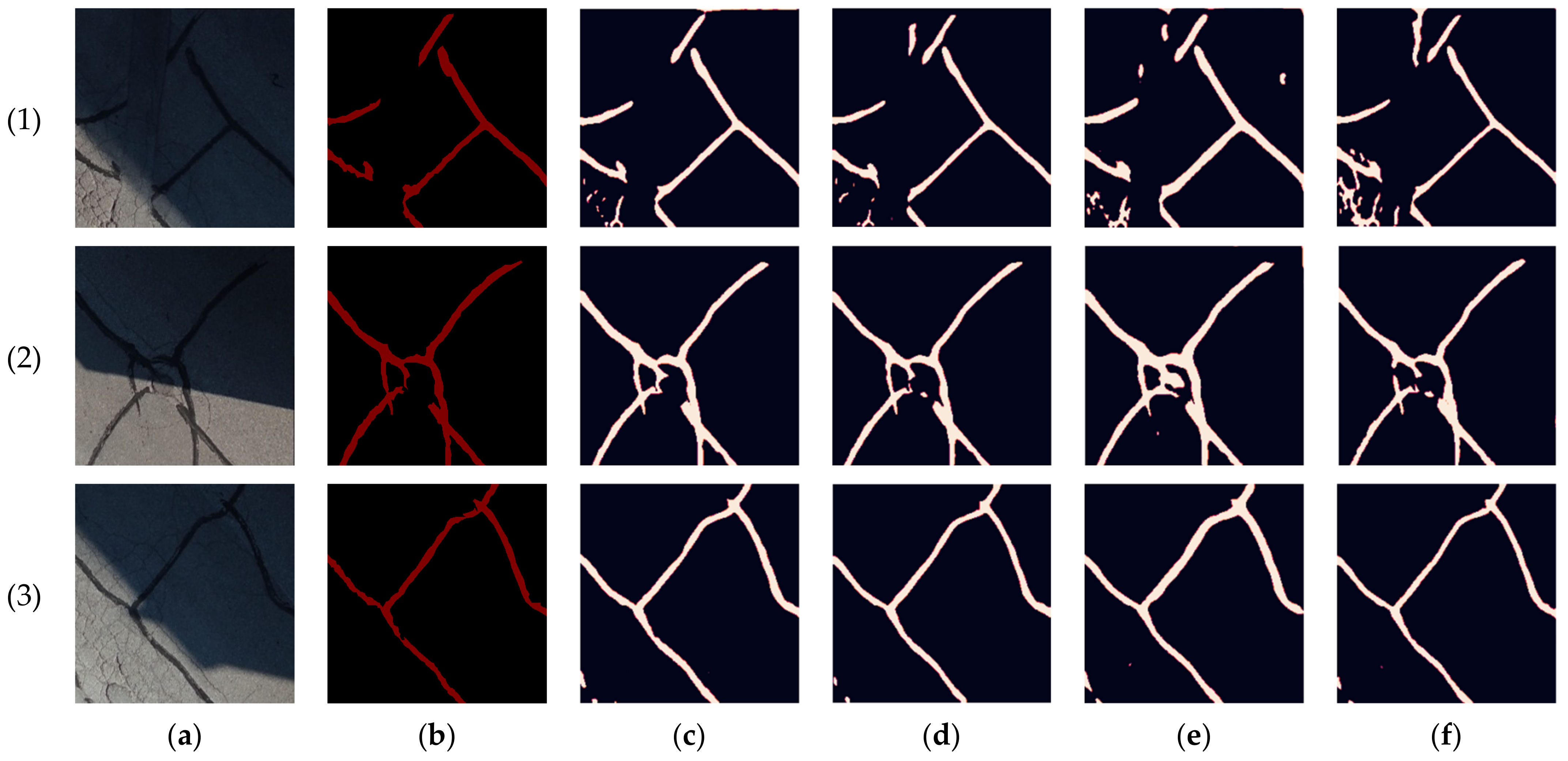
In the context of sealed crack analysis, the results from the third dataset exhibited a similar trend to that of the second dataset, yet with a significant overall improvement in segmentation performance. Significantly, as shown in
Table 8, the recall of the RGB case in the third dataset was improved by 5% compared to the RGB case of the second dataset. Integrating the intensity layer with the RGB, i.e., forming the RGB + intensity combination, resulted in consistent enhancements of approximately 1.5% in precision, 5% in recall, and 3% in F-measure. These results align with the outcomes of the second dataset. Remarkably, integrating the elevation layer with RGB, i.e., creating the RGB + elevation combination, led to a substantial 7% improvement in recall compared to the RGB case, surpassing the 3% improvement observed in the second dataset. This enhancement highlights the significant impact of the lower flight height, enabling the acquisition of higher-resolution LiDAR data, thus significantly improving semantic segmentation performance. Finally, the addition of both the intensity and elevation layers to the RGB increased the precision, recall, and F-measure by 2%, 7%, and 4%, respectively, compared to the RGB case. Such an increase emphasizes the importance of image/LiDAR fusion, enabling the capture of finer details of sealed cracks, as exemplified in image 3 (
Figure 27), and the elimination of misclassifications, as demonstrated in image 4 of the same figure.
Integrating LiDAR data with the RGB images should enhance network performance significantly. This enhancement is primarily attributed to the intensity data, which help in differentiating materials and mitigating shadows, and the elevation data, which add crucial geometric information. However, the deterioration in segmentation accuracy metrics for crack samples in the first two datasets was essentially due to the limitations of the lower-grade LiDAR sensors. These sensors exhibit low spatial resolution and high point cloud noise, indicating that they might be better suited for detecting severe cracks or other forms of pavement distress, such as sealed cracks and potholes, rather than fine pavement cracks. Notably, in the third dataset, flying the UAV at a lower altitude enabled the capture of higher-resolution LiDAR data. Consequently, the incorporation of LiDAR data improved recall, indicating the detection of finer crack details. However, this improvement came at the cost of lower precision, primarily due to point cloud low resolution, leading to misclassifications.
In contrast, the proposed image/LiDAR data fusion significantly enhanced the segmentation of sealed cracks in the second dataset and demonstrated even greater improvements in the third dataset. This substantial enhancement emphasizes the critical importance of image/LiDAR fusion for pavement distress detection, particularly when aiming for accurate segmentation results in complex scenarios.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}