

Joint Reconfiguration after Failure for Performing Emblematic Gestures in Humanoid Receptionist Robot


Abstract
:1. Introduction
2. Materials and Methods
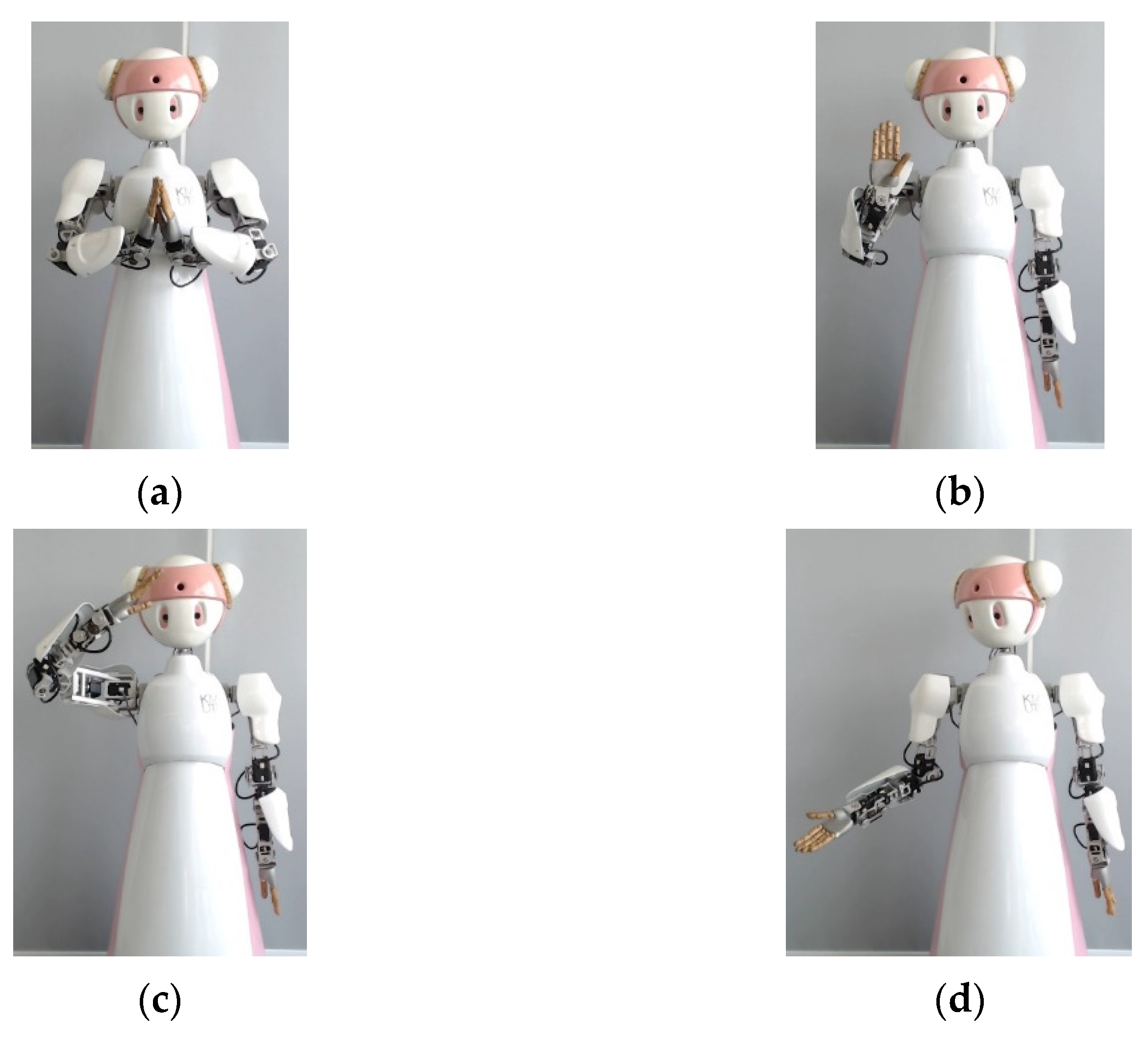
2.1. Namo Robot
2.2. Gesture Similarity Measurement
+ (wwrist_LR·dwrist_LR − doffset)
+ (wtip_LR·dtip_LR − doffset),
2.3. Bio-Inspired Joint Reconfiguration Method for Failure Recovery
2.4. Performance Analysis
2.4.1. Genetic Algorithm
2.4.2. Bacteria Foraging Optimization Algorithm
2.4.3. Artificial Bee Colony Algorithm
3. Results and Discussion
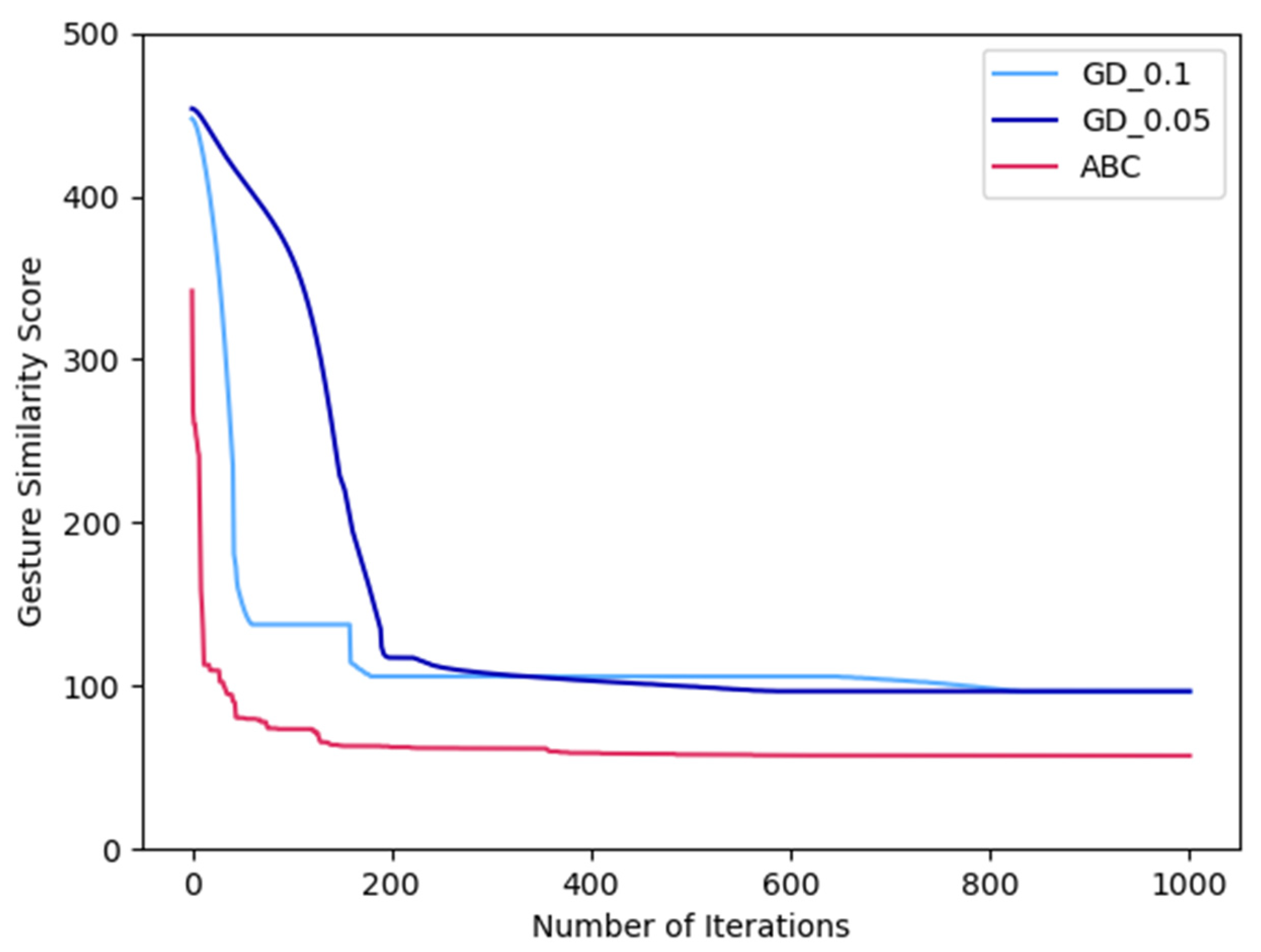
3.1. Parameter Set Tuning for Optimal Solution
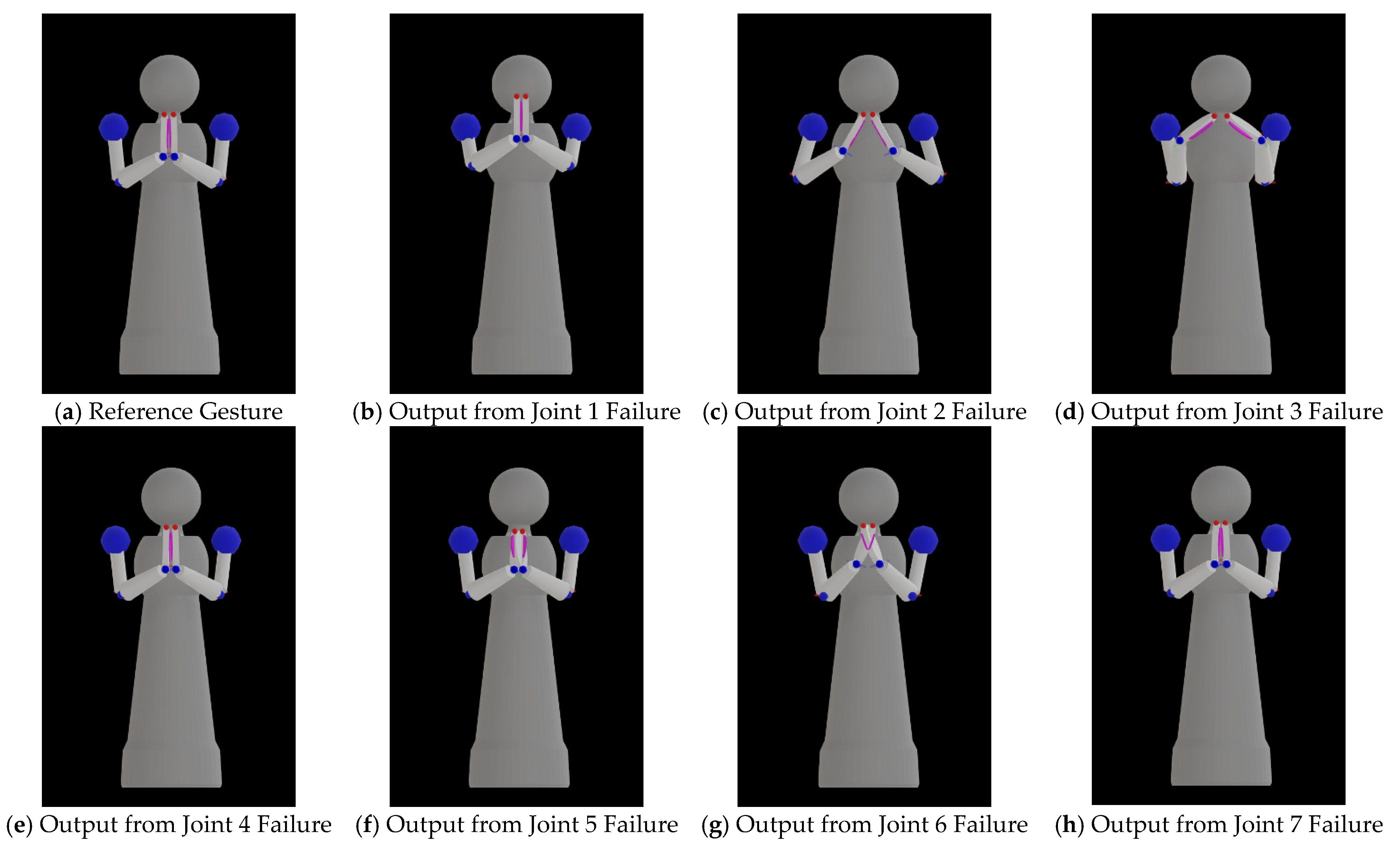
3.2. Joint Reconfiguration for All Possible Joint Failures
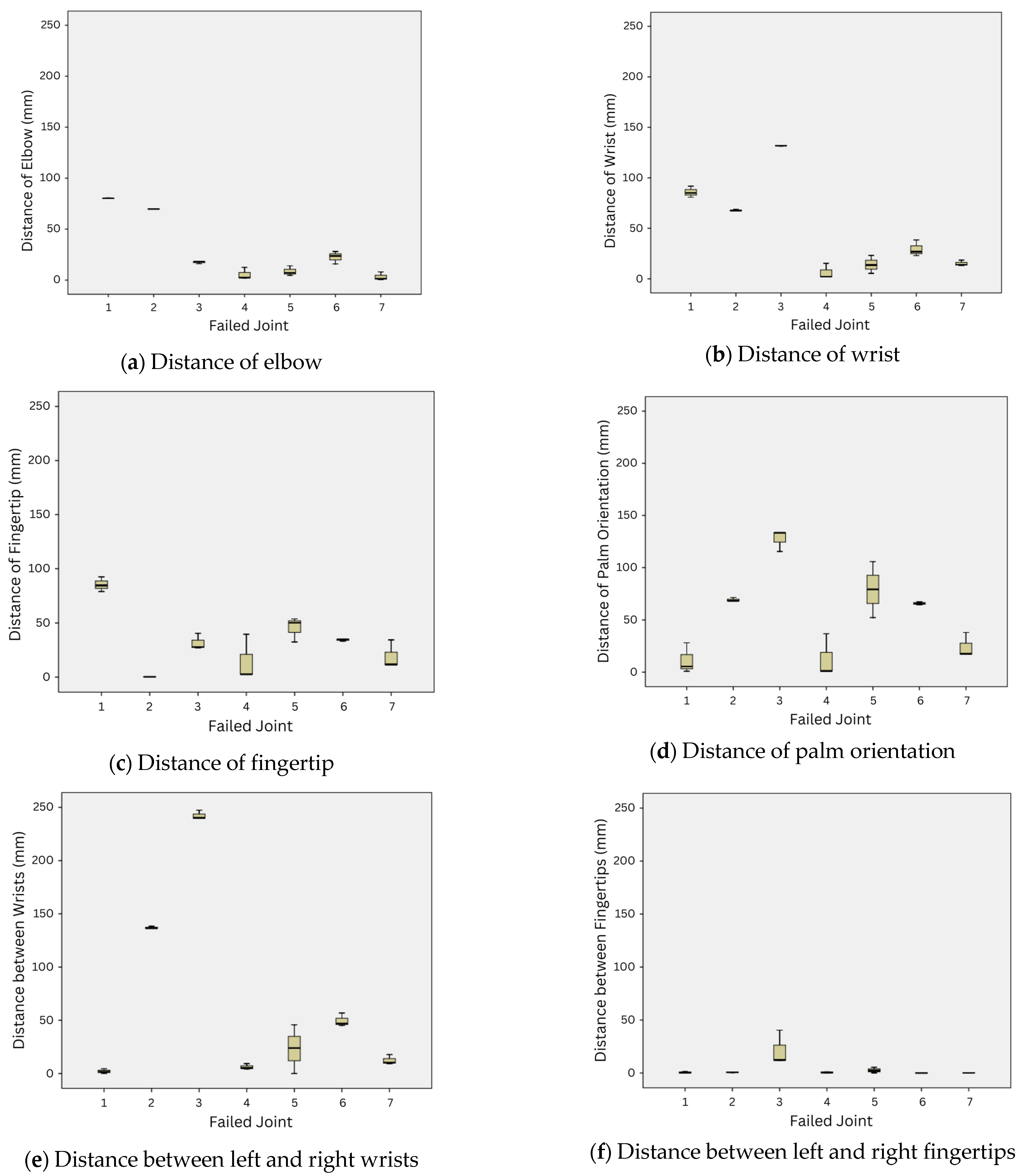
3.3. The Analysis of Output Gestures through the Gesture Similarity Measurement
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Caggiano, V.; De Santis, A.; Siciliano, B.; Chianese, A.A. Biomimetic Approach to Mobility Distribution for a Human-Like Redundant Arm. In Proceedings of the IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006. [Google Scholar]
- Ali, M.A.; Park, H.A.; Lee, C.G. Closed-Form Inverse Kinematic Joint Solution for Humanoid Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Maneewarn, T. Survey of social robots in Thailand. In Proceedings of the International Electrical Engineering Congress (iEECON), Chonburi, Thailand, 19–21 March 2014. [Google Scholar]
- Hoover, R.C.; Roberts, R.G.; Maciejewski, A.A.; Naik, P.S.; Ben-Gharbia, K.M. Designing a Failure-Tolerant Workspace for Kinematically Redundant Robots. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1421–1432. [Google Scholar] [CrossRef]
- Bader, A.M.; Maciejewski, A.A. Maximizing the failure-tolerant workspace area for planar redundant robots. Mech. Mach. Theory 2020, 143, 103635. [Google Scholar] [CrossRef]
- She, Y.; Xu, W.; Su, H.; Liang, B.; Shi, H. Fault-tolerant analysis and control of SSRMS-type manipulators with single-joint failure. Acta Astronaut. 2016, 120, 270–286. [Google Scholar] [CrossRef]
- Mu, Z.; Han, L.; Xu, W.; Li, B.; Liang, B. Kinematic analysis and fault-tolerant trajectory planning of space manipulator under a single joint failure. Robot. Biomim. 2016, 3, 16. [Google Scholar] [CrossRef]
- Lee, Y.; Tsagarakis, N.; Lee, J. Study on operational space control of a redundant robot with un-actuated joints: Experiments under actuation failure scenarios. Nonlinear Dyn. 2021, 105, 331–344. [Google Scholar] [CrossRef]
- Lewis, C.L.; Maciejewski, A.A. Dexterity optimization of kinematically redundant manipulators in the presence of joint failures. Comput. Electr. Eng. 1994, 20, 273–288. [Google Scholar] [CrossRef]
- Elsayed, B.A.; Takemori, T.; Matsuno, F. Joint failure recovery for snake robot locomotion using a shape-based approach. Artif. Life Robot. 2022, 27, 341–354. [Google Scholar] [CrossRef]
- Chen, G.; Yuan, B.; Jia, Q.; Fu, Y.; Tan, J. Trajectory optimization for inhibiting the joint parameter jump of a space manipulator with a load-carrying task. Mech. Mach. Theory vol. 2019, 140, 59–82. [Google Scholar] [CrossRef]
- Li, Q.; Zhao, J. A universal approach for configuration synthesis of reconfigurable robots based on fault tolerant indices. Ind. Robot. 2012, 39, 69–78. [Google Scholar] [CrossRef]
- Yan, Z.; Tan, J.; Liang, B.; Liu, H.; Yang, J. Active Fault-Tolerant Control Integrated with Reinforcement Learning Application to Robotic Manipulator. In Proceedings of the American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022. [Google Scholar]
- Cully, A.; Clune, J.; Tarapore, D.; Mouret, J.-B. Robots that can adapt like animals. Nature 2015, 521, 503–507. [Google Scholar] [CrossRef] [PubMed]
- Dereli, S.; Köker, R. A meta-heuristic proposal for inverse kinematics solution of 7-DOF serial robotic manipulator: Quantum behaved particle swarm algorithm. Artif. Intell. Rev. 2020, 53, 949–964. [Google Scholar] [CrossRef]
- Yin, S.; Luo, Q.; Zhou, G.; Zhou, Y.; Zhu, B. An equilibrium optimizer slime mould algorithm for inverse kinematics of the 7-DOF robotic manipulator. Sci. Rep. 2022, 12, 9421. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, A.; Singh, O.; Ray, A.K. Inverse kinematic solution of a 7 DOF robotic manipulator using boundary restricted particle swarm optimization. IFAC-PapersOnLine 2022, 55, 101–105. [Google Scholar] [CrossRef]
- Dereli, S.; Köker, R. Calculation of the inverse kinematics solution of the 7-DOF redundant robot manipulator by the firefly algorithm and statistical analysis of the results in terms of speed and accuracy. Inverse Probl. Sci. Eng. 2020, 28, 601–613. [Google Scholar] [CrossRef]
- Dereli, S.; Köker, R. Simulation based calculation of the inverse kinematics solution of 7-DOF robot manipulator using artificial bee colony algorithm. SN Appl. Sci. 2020, 2, 27. [Google Scholar] [CrossRef]
- Xu, W.; She, Y.; Xu, Y. Analytical and semi-analytical inverse kinematics of SSRMS-type manipulators with single joint locked failure. Acta Astronaut. 2014, 105, 201–217. [Google Scholar] [CrossRef]
- Rayankula, V.; Pathak, P.M. Fault Tolerant Control and Reconfiguration of Mobile Manipulator. J. Intell. Robot. Syst. 2021, 101, 34. [Google Scholar] [CrossRef]
- Li, K.; Zhang, Y. Fault-tolerant motion planning and control of redundant manipulator. Control Eng. Pract. 2012, 20, 282–292. [Google Scholar] [CrossRef]
- Li, Z.; Li, C.; Li, S.; Cao, X. A Fault-Tolerant Method for Motion Planning of Industrial Redundant Manipulator. IEEE Trans. Ind. Inform. 2020, 16, 7469–7478. [Google Scholar] [CrossRef]
- Mavridis, N. A review of verbal and non-verbal human–robot interactive. Robot. Auton. Syst. 2013, 63, 22–35. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Pearson Education: London, UK, 2005. [Google Scholar]
- Chaiyanan, C.; Iramina, K.; Kaewkamnerdpong, B. Investigation on Identifying Implicit Learning Event from EEG Signal Using Multiscale Entropy and Artificial Bee Colony. Entropy 2021, 23, 617. [Google Scholar] [CrossRef]
- Brownlee, J. Clever Algorithms: Nature-Inspired Programming Recipes; Lulu.com: Research Triangle Park, NC, USA, 2011. [Google Scholar]
- Tabandeh, S.; Clark, C.; Melek, W. A Genetic Algorithm Approach to solve for Multiple Solutions of Inverse Kinematics using Adaptive Niching and Clustering. In Proceedings of the IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006. [Google Scholar]
- Momani, S.M.; Abo-Hammour, Z.; Alsmadi, O. Solution of Inverse Kinematics Problem using Genetic Algorithms. Appl. Math. Inf. Sci. 2015, 10, 225–233. [Google Scholar] [CrossRef]
- Zhou, Z.; Guo, H.; Wang, Y.; Zhu, Z.; Wu, J.; Liu, X. Inverse kinematics solution for robotic manipulator based on extreme learning machine and sequential mutation genetic algorithm. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418792992. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar]
- Aizawa, S.-I. Flagella. In Molecular Medical Microbiology, 2nd ed.; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Huynh, B.-P.; Su, S.-F.; Kuo, Y.-L. Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment. Symmetry 2020, 12, 564. [Google Scholar] [CrossRef]
- Wang, Z.; Peng, J.; Ding, S. A Bio-inspired trajectory planning method for robotic manipulators based on improved bacteria foraging optimization algorithm and tau theory. Math. Biosci. Eng. 2022, 19, 643–662. [Google Scholar] [CrossRef] [PubMed]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2012, 42, 21–57. [Google Scholar] [CrossRef]
- Zhang, L.; Xiao, N. A novel artificial bee colony algorithm for inverse kinematics calculation of 7-DOF serial manipulators. Soft Comput. 2019, 23, 3269–3277. [Google Scholar] [CrossRef]
- Akay, B.; Karaboga, D. Artificial Bee Colony Algorithm. In Swarm Intelligence Algorithms: A Tutorial; Slowik, A., Ed.; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2017, arXiv:1609.04747. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint No. | (Degree) | (mm) | (mm) | (Degree) |
|---|---|---|---|---|
| 1 | 182 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 206.5 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 206 | 0 | ||
| 6 | 0 | 0 | ||
| 7 | 0 | 0 | ||
| E | 0 | 0 | −130 | 0 |
| Gesture | Joint Angle (Degree) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| Wai | 30 | 5 | −45 | 90 | −10 | −45 | 45 |
| Bye | 46 | −11 | 24 | 95 | −53 | −32 | 41 |
| Salute | 100 | −43 | −45 | 100 | 47 | 28 | 10 |
| Side Invite | 34 | −8 | 45 | 72 | 51 | 26 | 26 |
| Average | 52.5 | −14.25 | −5.25 | 89.25 | 8.75 | −5.75 | 30.5 |
| Control Parameter | Values | Best Gesture Similarity Score | Computation Time (s) |
|---|---|---|---|
| GA | 58.1797 | 0.6540 | |
| Population size | 80 | ||
| Maximum iteration | 50 | ||
| Crossover rate | 0.8 | ||
| Mutation rate | 0.25 | ||
| Mutation step size | 0.15 | ||
| BFOA | 57.1479 | 0.5655 | |
| Population size | 10 | ||
| Swimming length | 0.5 | ||
| Number of elimination-dispersal events | 2 | ||
| Number of reproduction steps | 6 | ||
| Number of chemotactic steps | 10 | ||
| Number of swim steps | 15 | ||
| Probability of elimination-dispersal | 0.3 | ||
| The depth of the attractant signal | 0.4 | ||
| The width of the attractant signal | 0.3 | ||
| The height of the repellant effect | 0.4 | ||
| The width of the repellant effect | 0.3 | ||
| ABC | 57.1431 | 0.5457 | |
| Population size | 5 | ||
| Maximum iteration | 500 | ||
| Limit | 150 |
| Emblematic Gestures | Descriptive Statistics of Difference from Reference Gestures | Kruskal–Wallis Test | |||||
|---|---|---|---|---|---|---|---|
| MIN | MAX | MEAN | SD | Median | Interquartile Range | ||
| Wai | |||||||
| GA | 58.1797 | 88.1129 | 70.7241 | 5.9783 | 70.6528 | 9.0588 | H(2) = 144.539 p = 0.000 |
| BFOA | 57.1479 | 139.2824 | 64.4391 | 16.8914 | 58.4939 | 3.4149 | |
| ABC | 57.1431 | 83.2653 | 59.1699 | 3.0858 | 58.1876 | 2.1447 | |
| Bye | |||||||
| GA | 6.0976 | 55.3328 | 26.9466 | 10.0887 | 25.6681 | 14.0880 | H(2) = 138.612 p = 0.000 |
| BFOA | 3.4758 | 82.5701 | 16.8547 | 17.9914 | 9.4605 | 16.5519 | |
| ABC | 3.2491 | 61.4498 | 6.8030 | 6.6568 | 5.6970 | 3.7215 | |
| Salute | |||||||
| GA | 37.2962 | 64.8065 | 48.6495 | 6.5060 | 48.4423 | 9.7109 | H(2) = 133.416 p = 0.000 |
| BFOA | 35.4799 | 123.0403 | 51.0233 | 25.0001 | 37.5537 | 20.9101 | |
| ABC | 35.4694 | 42.6509 | 36.2064 | 1.1113 | 35.8170 | 0.8266 | |
| Side Invite | |||||||
| GA | 8.8991 | 34.1130 | 19.6917 | 6.4367 | 19.4553 | 10.2574 | H(2) = 97.740 p = 0.000 |
| BFOA | 7.5411 | 124.6998 | 27.7533 | 28.9818 | 11.0276 | 37.2525 | |
| ABC | 7.4523 | 37.3143 | 9.3562 | 3.3229 | 8.6145 | 1.8183 | |
| Emblematic Gestures | Descriptive Statistics of Computation Time (Seconds) | Kruskal–Wallis Test | |||||
|---|---|---|---|---|---|---|---|
| MIN | MAX | MEAN | SD | Median | Interquartile Range | ||
| Wai | |||||||
| GA | 0.6120 | 0.7307 | 0.6635 | 0.0316 | 0.6531 | 0.0202 | H(2) = 192.905 p = 0.000 |
| BFOA | 0.4658 | 0.6895 | 0.5669 | 0.0456 | 0.5674 | 0.0713 | |
| ABC | 0.5427 | 0.5729 | 0.5504 | 0.0050 | 0.5500 | 0.0058 | |
| Bye | |||||||
| GA | 0.5529 | 0.6139 | 0.5725 | 0.0212 | 0.5604 | 0.0435 | H(2) = 151.510 p = 0.000 |
| BFOA | 0.4291 | 0.6526 | 0.5256 | 0.0371 | 0.5215 | 0.0478 | |
| ABC | 0.5290 | 0.5550 | 0.5365 | 0.0045 | 0.5356 | 0.0037 | |
| Salute | |||||||
| GA | 0.5441 | 0.6098 | 0.5608 | 0.0197 | 0.5496 | 0.0402 | H(2) = 88.890 p = 0.000 |
| BFOA | 0.4186 | 0.6195 | 0.5415 | 0.0487 | 0.5433 | 0.0700 | |
| ABC | 0.5274 | 0.5500 | 0.5356 | 0.0046 | 0.5352 | 0.0050 | |
| Side Invite | |||||||
| GA | 0.5431 | 0.6034 | 0.5601 | 0.0199 | 0.5492 | 0.0392 | H(2) = 103.477 p = 0.000 |
| BFOA | 0.4427 | 0.6216 | 0.5338 | 0.0394 | 0.5375 | 0.0577 | |
| ABC | 0.5261 | 0.5501 | 0.5356 | 0.0053 | 0.5344 | 0.0077 | |
| Gestures/Joint Failure | Algorithm Performance | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GA | BFOA | ABC | ||||||||||
| Min. Diff. | Time | Median Diff. | IQR Diff. | Min. Diff. | Time | Median Diff. | IQR Diff. | Min. Diff. | Time | Median Diff. | IQR Diff. | |
| Wai | ||||||||||||
| Joint 1 | 49.1402 | 0.6566 | 69.6643 | 11.0471 | 42.8178 | 0.6187 | 50.5072 | 10.7610 | 41.0485 | 0.5774 | 44.3499 | 2.8718 |
| Joint 2 | 58.1797 | 0.6540 | 70.6528 | 9.0588 | 57.1479 | 0.5655 | 58.4939 | 3.4149 | 57.1431 | 0.5457 | 58.1876 | 2.1447 |
| Joint 3 | 98.6053 | 0.6567 | 107.8992 | 10.9072 | 93.7746 | 0.5258 | 93.9123 | 3.2764 | 93.7706 | 0.5617 | 93.8543 | 1.0137 |
| Joint 4 | 18.9686 | 0.6536 | 45.7340 | 15.0691 | 2.2879 | 0.5539 | 14.2642 | 10.6975 | 2.2689 | 0.5570 | 6.0225 | 2.7596 |
| Joint 5 | 39.3249 | 0.6435 | 55.4432 | 9.6103 | 23.1424 | 0.5179 | 29.7293 | 10.5429 | 24.2184 | 0.5498 | 30.7042 | 10.7042 |
| Joint 6 | 35.2101 | 0.6485 | 43.5085 | 8.2551 | 32.8321 | 0.5077 | 36.2486 | 12.7388 | 33.0264 | 0.5456 | 35.3097 | 9.2949 |
| Joint 7 | 19.5293 | 0.6496 | 39.3058 | 14.2708 | 8.8689 | 0.4662 | 12.9176 | 10.1463 | 8.8584 | 0.5688 | 10.0184 | 2.8088 |
| Bye | ||||||||||||
| Joint 1 | 18.1645 | 0.5614 | 32.6537 | 8.6828 | 14.5946 | 0.5371 | 14.9520 | 29.3480 | 14.5736 | 0.5344 | 14.8986 | 0.4006 |
| Joint 2 | 6.0976 | 0.5573 | 25.6681 | 14.0880 | 3.4758 | 0.5088 | 9.4605 | 16.5519 | 3.2491 | 0.5413 | 5.6970 | 3.7215 |
| Joint 3 | 41.6956 | 0.5581 | 53.1471 | 13.9760 | 38.5793 | 0.4468 | 46.0145 | 4.2315 | 38.5830 | 0.5342 | 39.3959 | 4.2612 |
| Joint 4 | 11.2942 | 0.6028 | 35.2845 | 17.4609 | 9.5524 | 0.5492 | 9.9890 | 49.1354 | 9.5561 | 0.5338 | 9.7593 | 0.9447 |
| Joint 5 | 54.8825 | 0.6036 | 58.8346 | 4.7642 | 52.7563 | 0.4211 | 53.8811 | 1.6746 | 52.6081 | 0.5304 | 53.5293 | 2.2006 |
| Joint 6 | 31.7665 | 0.5477 | 44.6053 | 10.7182 | 27.5324 | 0.4849 | 28.2962 | 4.5840 | 27.6241 | 0.5431 | 31.1612 | 6.7783 |
| Joint 7 | 8.7007 | 0.5956 | 28.9101 | 15.9774 | 7.8289 | 0.4960 | 11.0214 | 37.2409 | 7.8396 | 0.5404 | 8.9075 | 4.0756 |
| Salute | ||||||||||||
| Joint 1 | 82.3338 | 0.5472 | 84.8872 | 3.4310 | 82.2325 | 0.6137 | 82.5707 | 31.2031 | 82.2782 | 0.5369 | 82.7736 | 0.4377 |
| Joint 2 | 37.2962 | 0.5469 | 48.4423 | 9.7109 | 35.4799 | 0.6014 | 37.5537 | 20.9101 | 35.4694 | 0.5394 | 35.8170 | 0.8266 |
| Joint 3 | 44.2610 | 0.5525 | 57.1333 | 11.2424 | 42.0222 | 0.5558 | 43.1040 | 46.4772 | 42.0221 | 0.5408 | 42.3335 | 0.7601 |
| Joint 4 | 21.5768 | 0.6080 | 34.7085 | 13.3364 | 18.1860 | 0.5824 | 22.5206 | 54.7482 | 18.1818 | 0.5389 | 18.6810 | 1.8249 |
| Joint 5 | 28.2134 | 0.5476 | 38.8455 | 10.0302 | 24.1045 | 0.4632 | 27.6639 | 30.6599 | 24.1781 | 0.5323 | 29.4687 | 5.8234 |
| Joint 6 | 34.2160 | 0.5542 | 50.9548 | 11.3999 | 33.0824 | 0.5050 | 35.3237 | 35.8533 | 33.2683 | 0.5367 | 33.8175 | 16.5031 |
| Joint 7 | 21.3601 | 0.5929 | 30.4201 | 8.2655 | 17.4007 | 0.5125 | 17.5952 | 21.4105 | 17.3955 | 0.5364 | 17.3971 | 0.0105 |
| Side Invite | ||||||||||||
| Joint 1 | 51.7017 | 0.5483 | 61.7445 | 7.1490 | 48.8570 | 0.5537 | 58.0899 | 54.1146 | 48.8454 | 0.5376 | 49.1610 | 0.5528 |
| Joint 2 | 8.8991 | 0.5464 | 19.4553 | 10.2574 | 7.5411 | 0.5404 | 11.0276 | 37.2525 | 7.4523 | 0.5428 | 8.6145 | 1.8183 |
| Joint 3 | 62.9119 | 0.5445 | 75.5241 | 8.7711 | 57.7096 | 0.4627 | 58.9446 | 20.0700 | 57.7082 | 0.5331 | 57.7507 | 0.2847 |
| Joint 4 | 27.2899 | 0.5526 | 32.6247 | 6.0936 | 26.7073 | 0.5202 | 34.6626 | 28.3888 | 26.7035 | 0.5513 | 26.7821 | 0.3401 |
| Joint 5 | 32.7265 | 0.5671 | 47.7179 | 8.7698 | 29.8469 | 0.4813 | 35.3923 | 18.5515 | 29.6142 | 0.5386 | 31.0482 | 2.3620 |
| Joint 6 | 24.1722 | 0.5683 | 31.1570 | 8.5519 | 23.7687 | 0.5164 | 28.4278 | 42.2346 | 23.7868 | 0.5481 | 26.6748 | 4.3452 |
| Joint 7 | 7.8360 | 0.5744 | 19.4936 | 10.9503 | 3.5024 | 0.5659 | 23.3782 | 50.3712 | 3.4910 | 0.5402 | 4.4502 | 1.5727 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jutharee, W.; Kaewkamnerdpong, B.; Maneewarn, T. Joint Reconfiguration after Failure for Performing Emblematic Gestures in Humanoid Receptionist Robot. Sensors 2023, 23, 9277. https://doi.org/10.3390/s23229277
Jutharee W, Kaewkamnerdpong B, Maneewarn T. Joint Reconfiguration after Failure for Performing Emblematic Gestures in Humanoid Receptionist Robot. Sensors. 2023; 23(22):9277. https://doi.org/10.3390/s23229277
Chicago/Turabian StyleJutharee, Wisanu, Boonserm Kaewkamnerdpong, and Thavida Maneewarn. 2023. "Joint Reconfiguration after Failure for Performing Emblematic Gestures in Humanoid Receptionist Robot" Sensors 23, no. 22: 9277. https://doi.org/10.3390/s23229277
APA StyleJutharee, W., Kaewkamnerdpong, B., & Maneewarn, T. (2023). Joint Reconfiguration after Failure for Performing Emblematic Gestures in Humanoid Receptionist Robot. Sensors, 23(22), 9277. https://doi.org/10.3390/s23229277