
A Sparse-Array Design Method Using Q Uniform Linear Arrays for Direction-of-Arrival Estimation


Abstract
:1. Introduction
- The property of consecutive virtual sensors in SA-U2 is considered, which gives the conclusions corresponding to any values of sensor number and the inter-element spacing of the two subarrays.
- The 4C criterion is described, and one algorithm for solving displacement between subarrays under Q given ULAs is presented. The 4C criterion is less complicated than the ANA and more flexible than the GNSA. SA-UQ can estimate underdetermined signals.
- Based on the 4C criterion, SA-U3 is presented, which can obtain a higher DOFs than that using two ULAs and achieves DOFs close to the GNSA. Moreover, through the analysis of the design method, the order of cross-co-subarrays can influence the DOFs.
2. Preliminary
2.1. Signal Model
2.2. SS-MUSIC
3. The Configuration of SA-UQ
3.1. The Basic Analysis of SA-U2
- 1.
- When or , the maximum number of consecutive lags is not bigger than .
- 2.
- When and , the consecutive lags are from to .
- 3.
- With a fixed value of T, when , , and , the number of consecutive lags, defined as , can achieve maximum value as . The values of can be reversed, and the conclusion is still valid.
- 1.
- In order to have a big value of in , the number of sensors of the two subarrays should be no less than and , respectively.
- 2.
- In order to have a big in , and should be close, and the gap between and should be big.
3.2. The Solutions for SA-UQ
- 1.
- Set , and , where .
- 2.
- Set and , where . Moreover, any two values should be coprime integers.
- 3.
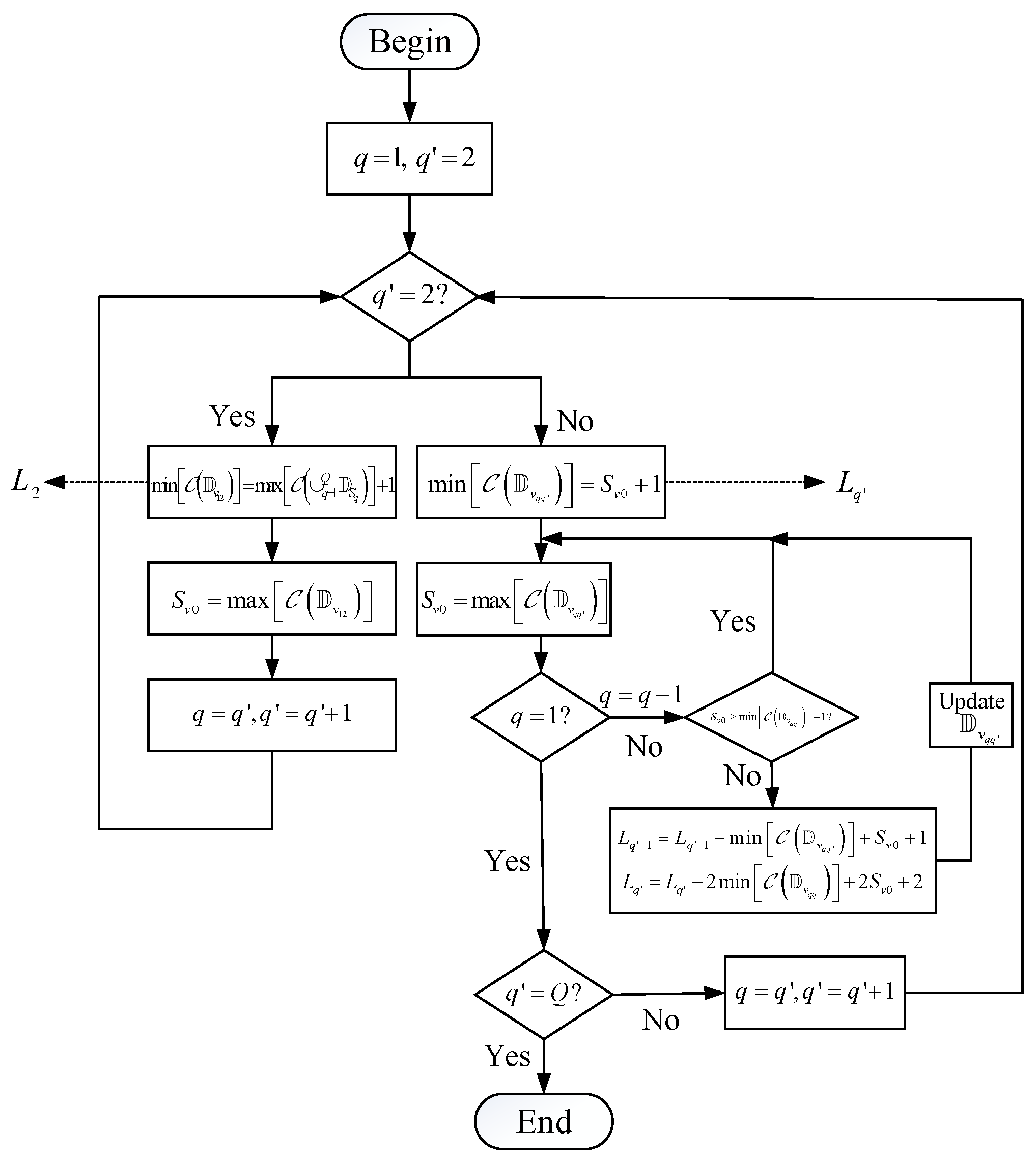
- The main purpose is to connect the consecutive lags of all cross difference co-subarrays. . and . A flow chart gives one method to find the solutions for displacement between the subarrays in Figure 2, and the key steps are shown in Algorithm 1.
| Algorithm 1 The processing of finding the solutions for displacement between the subarrays |
|
- 1.
- The values of the sensor number and inter-element spacing are based on Proposition 1, which ensures any cross-difference co-subarray has a big number of consecutive lags.
- 2.
- . So, . At first, we set .
- 3.
- When and , we can solve through , where .
- 4.
- When and , if , two consecutive parts are not connected. Thus, we change the value and to ensure that two sets are continuous.
3.3. The Application in SA-U3
- 1.
- has the consecutive lags from to .
- 2.
- has the consecutive lags from to .
- 3.
- has the consecutive lags from to .
- 4.
- has the consecutive lags from to .
- 5.
- has the consecutive lags from to , where .
- From (15), it is obvious that the lags from to belong to , the lags belong to , and the lags are even and belong to . So, .
- The subarray 1 and subarray 2, respectively, have the inter-element spacing as 1 and 2, and both have r sensors. Thus, . has no hole and has the lags from to . Due to , the range of lags is .
- The subarray 1 and subarray 3 have the inter-element spacing as 1 and r with r and sensors. Thus, . has no hole and has the lags from to . Due to , the range of lags is .
- The subarray 2 and subarray 3 have the inter-element spacing as 2 and r with r and sensors. Thus, . has the consecutive lags from to . Due to , the range of consecutive lags is .
- Based on the proof of the last four properties, we can find that the the consecutive of the self-difference coarray and cross-difference coarray are connected, satisfying the 4C criterion. Hence, .
4. Performance Analysis and Simulation Experiments
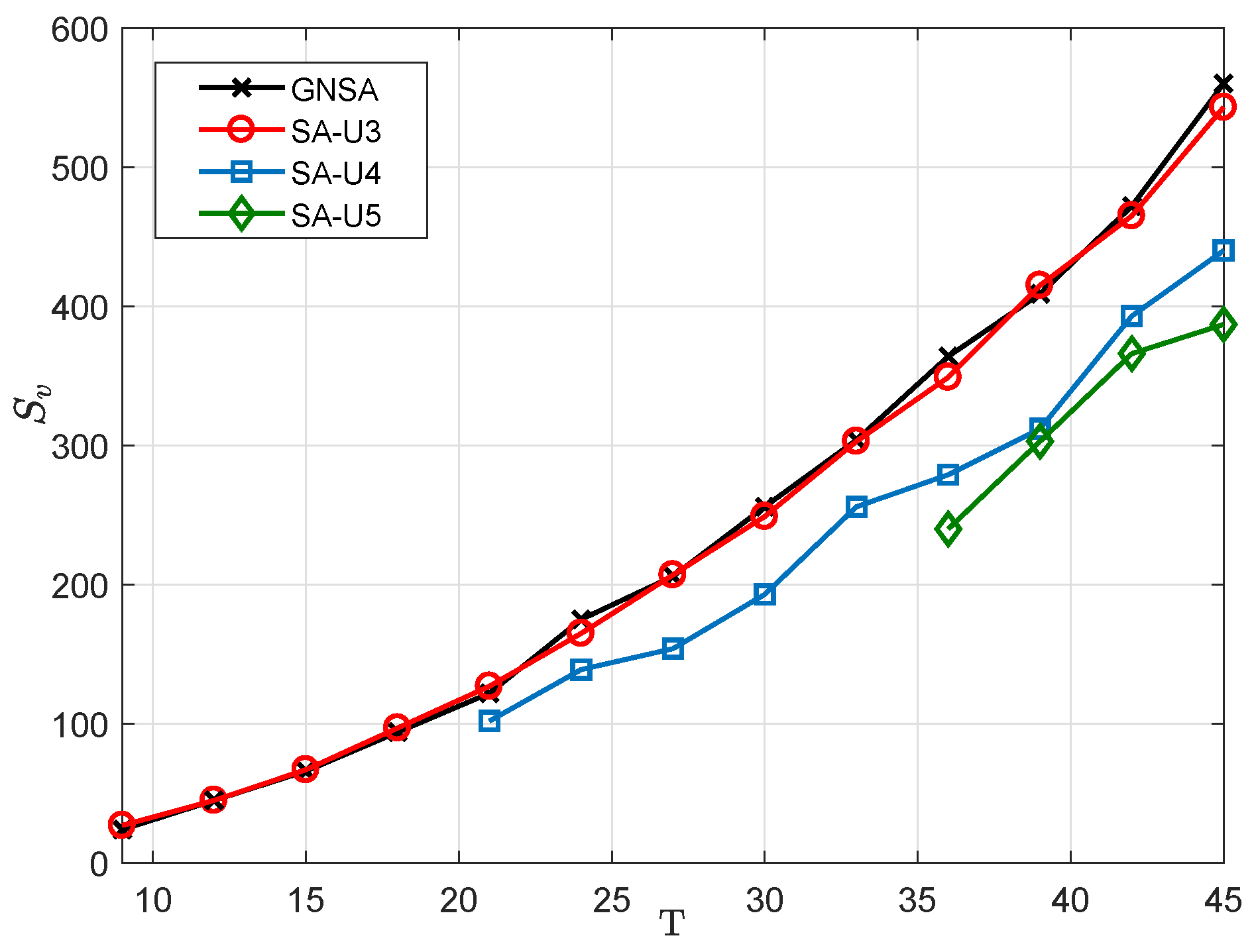
4.1. The Analysis of DOF
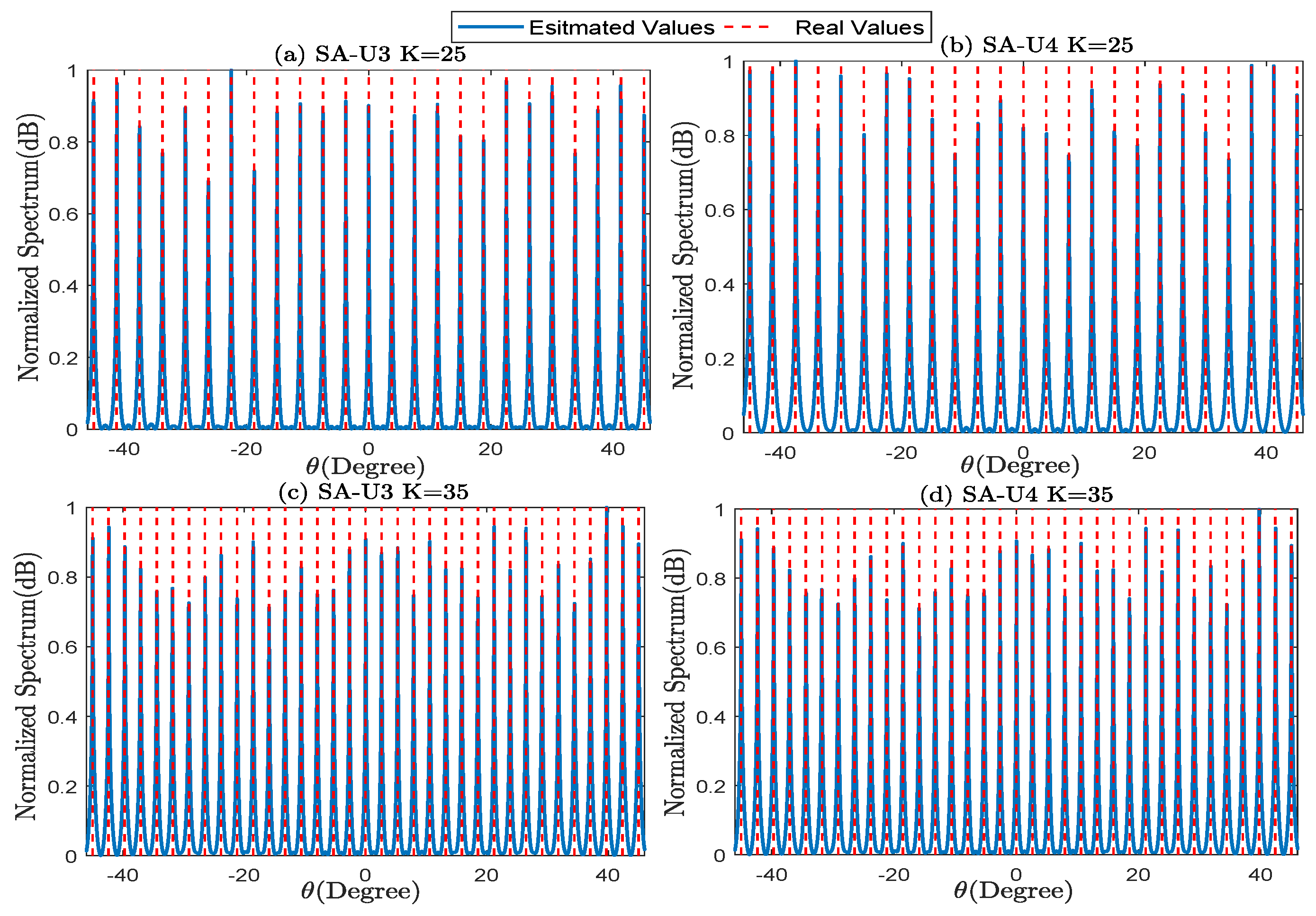
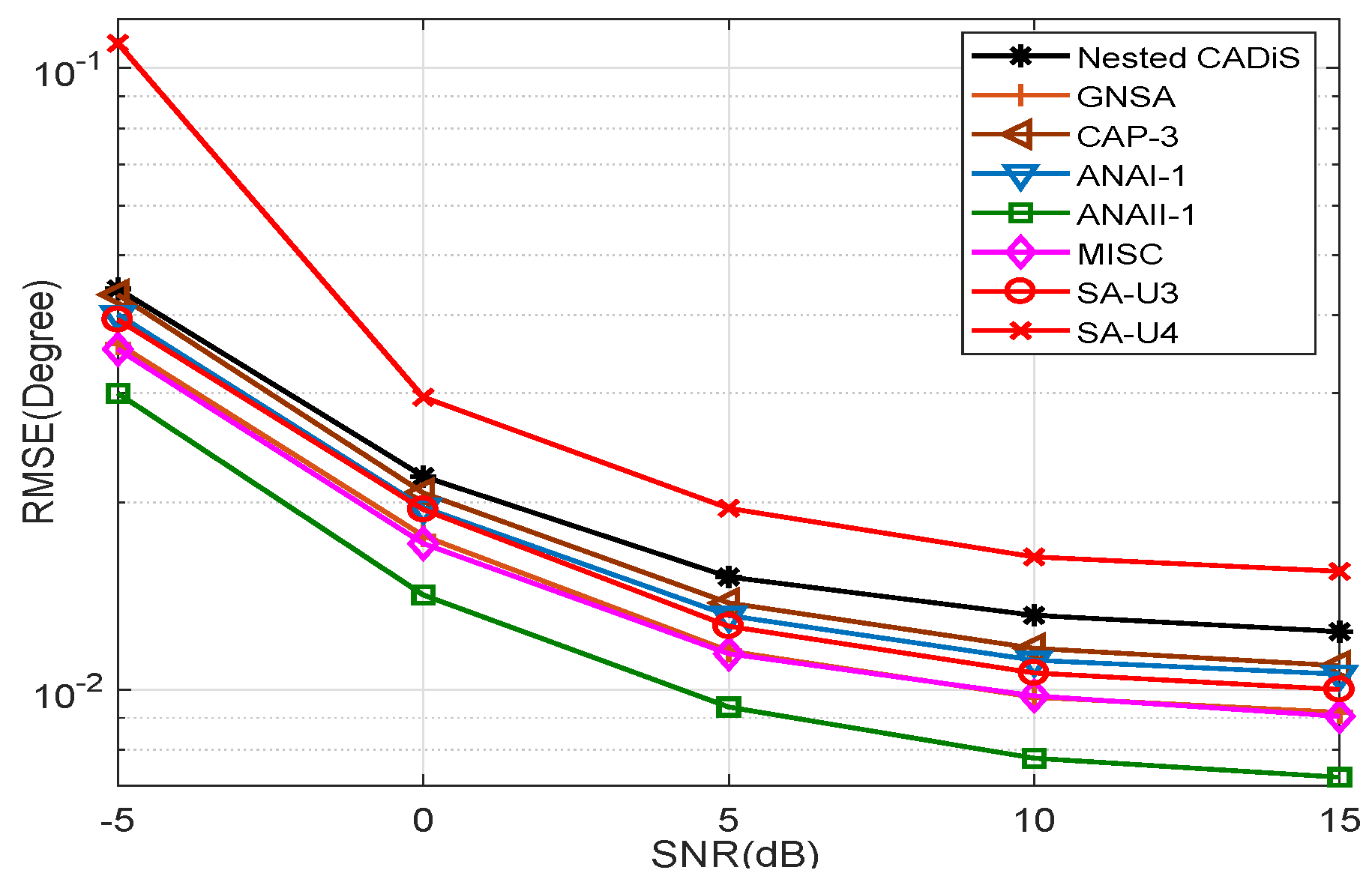
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Proof of Proposition 1
- We prove it using a contradiction. When or , there exist consecutive lags in . The first lag and the th lag satisfy thatDue to , (A2) can be rewritten asDue to or , . However, . Thus, (A2) is false, and there are no more than consecutive lags in .
- We first consider . Given an arbitrary integer , where , we need to prove that such that holds. When , . Due to , we can havewhich is equivalent toThe equation implies that , so the integer m satisfies that . Hence, when , . Obviously, when , the sensor location , so is still satisfied.Then, we consider . Assume an arbitrary integer , which meets . When , . Due to , we can havewhich is equivalent toThe equation also implies that , so the integer n satisfies that . Hence, when , . Obviously, when , the sensor location , so is still satisfied.When , we can find that and . In conclusion, any value satisfying , belongs to .
- It is easy to have . When are fixed, we have the derivatives of asCase 1: If , can achieve maximum as when .Case 2: If , can achieve maximum as when .In conclusion, can achieve the maximum in Case 2. And, due to the Cauchy inequality, we can easily find that when or , , can obtain the maximum value.
References
- Sun, F.; Wu, Q.; Sun, Y.; Ding, G.; Lan, P. An iterative approach for sparse direction-of-arrival estimation in co-prime arrays with off-grid targets. Digit. Signal Process. 2017, 61, 35–42. [Google Scholar] [CrossRef]
- Sun, F.; Wu, Q.; Lan, P.; Ding, G.; Chen, L. Real-valued doa estimation with unknown number of sources via reweighted nuclear norm minimization. Signal Process. 2018, 148, 48–55. [Google Scholar] [CrossRef]
- Sun, F.; Lan, P.; Zhang, G. Reduced dimension based two-dimensional DOA estimation with full dofs for generalized co-prime planar arrays. Sensors 2018, 18, 1725. [Google Scholar] [CrossRef] [PubMed]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the music algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011. [Google Scholar]
- Zhang, D.; Zhang, Y.; Zheng, G.; Feng, C.; Tang, J. Improved doa estimation algorithm for co-prime linear arrays using root-music algorithm. Electron. Lett. 2017, 53, 1277–1279. [Google Scholar] [CrossRef]
- Li, J.; Jiang, D.; Zhang, X. Doa estimation based on combined unitary esprit for coprime mimo radar. IEEE Commun. Lett. 2017, 21, 96–99. [Google Scholar] [CrossRef]
- Moffet, A. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef]
- Ishiguro, M. Minimum redundancy linear arrays for a large number of antennas. Radio Sci. 1980, 15, 1163–1170. [Google Scholar]
- Robinson, J.P. Genetic search for golomb arrays. IEEE Trans. Inf. Theory 2000, 46, 1170–1173. [Google Scholar] [CrossRef]
- Vertatschitsch, E.; Haykin, S. Nonredundant arrays. Proc. IEEE 1986, 74, 217. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. A novel array structure for directions-of-arrival estimation with increased degrees of freedom. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010. [Google Scholar]
- Alinezhad, P.; Seydnejad, S.R.; Abbasi-Moghadam, D. Doa estimation in conformal arrays based on the nested array principles. Digit. Signal Process. 2016, 50, 191–202. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2010, 59, 573–586. [Google Scholar] [CrossRef]
- Wei, L.; Raza, A.R.; Shen, Q. Thinned coprime array for second-order difference co-array generation with reduced mutual coupling. IEEE Trans. Signal Process. 2019, 67, 2052–2065. [Google Scholar]
- Wang, X.; Chen, Z.; Ren, S.; Cao, S. Doa estimation based on the difference and sum coarray for coprime arrays. Digit. Signal Process. 2017, 69, 22–31. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Remarks on the spatial smoothing step in coarray music. IEEE Signal Process. Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]
- Liu, C.-L.; Vaidyanathan, P. Cramér–rao bounds for coprime and other sparse arrays, which find more sources than sensors. Digit. Signal Process. 2017, 61, 43–61. [Google Scholar] [CrossRef]
- Wang, M.; Nehorai, A. Coarrays, music, and the cramér–rao bound. IEEE Trans. Signal Process. 2016, 65, 933–946. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Qin, S.; Amin, M.G. Doa estimation exploiting coprime arrays with sparse sensor spacing. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Alamoudi, S.M.; Aldhaheri, M.A.; Alawsh, S.A.; Muqaibel, A.H. Sparse doa estimation based on a shifted coprime array configuration. In Proceedings of the 2016 16th Mediterranean Microwave Symposium (MMS), Abu Dhabi, United Arab Emirates, 14–16 November 2017. [Google Scholar]
- Ren, S.; Wang, W.; Chen, Z. Doa estimation exploiting unified coprime array with multi-period subarrays. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016. [Google Scholar]
- Xu, H.; Cui, W.; Mei, F.; Ba, B.; Jian, C. The design of a novel sparse array using two uniform linear arrays considering mutual coupling. J. Sens. 2021, 2021, 9934097. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Li, J.; Shi, J. Extensions of co-prime array for improved doa estimation with hole filling strategy. IEEE Sens. J. 2020, 25, 6724–6732. [Google Scholar] [CrossRef]
- Ma, P.; Li, J.; Zhao, G.; Zhang, X. Cap-3 coprime array for doa estimation with enhanced uniform degrees of freedom and reduced mutual coupling. IEEE Commun. Lett. 2021, 25, 1872–1875. [Google Scholar] [CrossRef]
- Liu, C.; Vaidyanathan, P.P. Super nested arrays: Linear sparse arrays with reduced mutual coupling—Part i: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Liu, C.; Vaidyanathan, P.P. Super nested arrays: Linear sparse arrays with reduced mutual coupling—Part ii: High-order extensions. IEEE Trans. Signal Process. 2016, 64, 4203–4217. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Lu, Y.; Ren, S.; Cao, S. Augmented nested arrays with enhanced dof and reduced mutual coupling. IEEE Trans. Signal Process. 2017, 65, 5549–5563. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, W.Q.; Kong, Y.; Zhang, Y.D. Misc array: A new sparse array design achieving increased degrees of freedom and reduced mutual coupling effect. IEEE Trans. Signal Process. 2019, 67, 1728–1741. [Google Scholar] [CrossRef]
- Yang, M.; Haimovich, A.M.; Chen, B.; Yuan, X. A new array geometry for DOA estimation with enhanced degrees of freedom. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3041–3045. [Google Scholar]
- Yang, M.; Ding, J.; Chen, B.; Yuan, X. A multiscale sparse array of spatially spread electromagnetic-vector-sensors for direction finding and polarization estimation. IEEE Access 2018, 6, 9807–9818. [Google Scholar] [CrossRef]
- Yang, M.; Haimovich, A.M.; Yuan, X.; Sun, L.; Chen, B. A unified array geometry composed of multiple identical subarrays with hole-free difference coarrays for underdetermined DOA estimation. IEEE Access 2018, 6, 14238–14254. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, H.; Zong, R.; Ba, B.; Wang, D. A novel high degree of freedom sparse array with displaced multistage cascade subarrays. Digit. Signal Process. 2019, 90, 36–45. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| → | ||
| → | ||
| → | ||
| → | ||
| → | ||
| Update | ||
| → | ||
| → | ||
| → |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Xu, H.; Ba, B.; Mei, F. A Sparse-Array Design Method Using Q Uniform Linear Arrays for Direction-of-Arrival Estimation. Sensors 2023, 23, 9116. https://doi.org/10.3390/s23229116
Zhang J, Xu H, Ba B, Mei F. A Sparse-Array Design Method Using Q Uniform Linear Arrays for Direction-of-Arrival Estimation. Sensors. 2023; 23(22):9116. https://doi.org/10.3390/s23229116
Chicago/Turabian StyleZhang, Jin, Haiyun Xu, Bin Ba, and Fengtong Mei. 2023. "A Sparse-Array Design Method Using Q Uniform Linear Arrays for Direction-of-Arrival Estimation" Sensors 23, no. 22: 9116. https://doi.org/10.3390/s23229116
APA StyleZhang, J., Xu, H., Ba, B., & Mei, F. (2023). A Sparse-Array Design Method Using Q Uniform Linear Arrays for Direction-of-Arrival Estimation. Sensors, 23(22), 9116. https://doi.org/10.3390/s23229116