

Adaptive DCS-SOMP for Localization Parameter Estimation in 5G Networks

Abstract
:1. Introduction
2. Related Works
3. System Model
4. Proposed Method
4.1. Sensing Matrix Construction
4.2. DCS-SOMP Approach for 3D Parameter Estimation
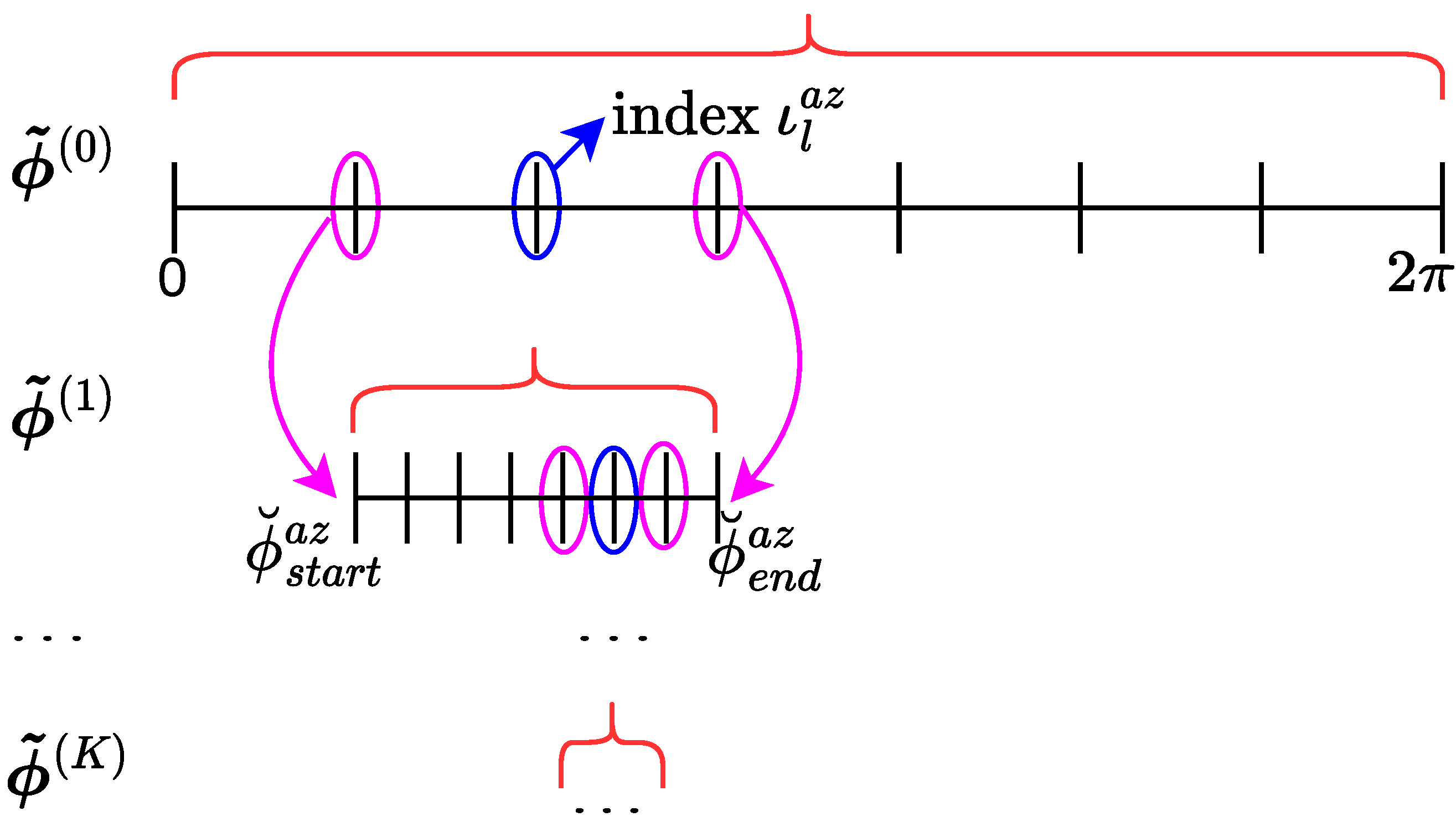
4.3. Adaptive Search in DCS-SOMP Approach for 3D Parameter Estimation
| Algorithm 1 Modified DCS-SOMP |
| Input: , , , , , , , , K, L, N |
| Output: , , , , |
|
| Algorithm 2 Adaptive Search |
| Input: , , , , , , , , K, N, , |
| Output: , , , , |
|
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schmidt, R. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Donoho, D. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Liu, G.; Chen, H.; Sun, X.; Qiu, R.C. Modified MUSIC Algorithm for DOA Estimation with Nyström Approximation. IEEE Sens. J. 2016, 16, 4673–4674. [Google Scholar] [CrossRef]
- Duarte, M.; Sarvotham, S.; Baron, D.; Wakin, M.; Baraniuk, R. Distributed Compressed Sensing of Jointly Sparse Signals. In Proceedings of the Conference Record of the Thirty-Ninth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 30 October–2 November 2005; pp. 1537–1541. [Google Scholar] [CrossRef]
- Shahmansoori, A.; Garcia, G.E.; Destino, G.; Seco-Granados, G.; Wymeersch, H. Position and Orientation Estimation Through Millimeter-Wave MIMO in 5G Systems. IEEE Trans. Wirel. Commun. 2018, 17, 1822–1835. [Google Scholar] [CrossRef]
- Fascista, A.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. Low-Complexity Accurate Mmwave Positioning for Single-Antenna Users Based on Angle-of-Departure and Adaptive Beamforming. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 4866–4870. [Google Scholar]
- Fessler, J.; Hero, A. Space-alternating Generalized Expectation-maximization Algorithm. IEEE Trans. Signal Process. 1994, 42, 2664–2677. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, K.; Zheng, Z. An Improved 3D Indoor Positioning Study with Ray Tracing Modeling for 6G Systems. Mob. Netw. Appl. 2023. [Google Scholar] [CrossRef]
- Chen, H.; Kim, H.; Ammous, M.; Seco-Granados, G.; Alexandropoulos, G.C.; Valaee, S.; Wymeersch, H. RISs and Sidelink Communications in Smart Cities: The Key to Seamless Localization and Sensing. IEEE Commun. Mag. 2023, 61, 140–146. [Google Scholar] [CrossRef]
- Luo, K.; Zhou, X.; Wang, B.; Huang, J.; Liu, H. Sparse Bayes Tensor and DOA Tracking Inspired Channel Estimation for V2X Millimeter Wave Massive MIMO System. Sensors 2021, 21, 4021. [Google Scholar] [CrossRef]
- Grishin, I.; Fokin, G.; Sevidov, V.; Okuneva, D. Analysis of the Spatial Smoothing Influence on the Perfomance of 2D-MUSIC for Ultra-Dense Networks. In Proceedings of the 2023 Wave Electronics and its Application in Information and Telecommunication Systems (WECONF), St. Petersburg, Russia, 30 May–3 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- He, D.; Chen, X.; Pei, L.; Zhu, F.; Jiang, L.; Yu, W. Multi-BS Spatial Spectrum Fusion for 2-D DOA Estimation and Localization Using UCA in Massive MIMO System. IEEE Trans. Instrum. Meas. 2021, 70, 5500213. [Google Scholar] [CrossRef]
- Tan, W.; Ma, S. Antenna Array Topologies for mmWave Massive MIMO Systems: Spectral Efficiency Analysis. IEEE Trans. Veh. Technol. 2022, 71, 12901–12915. [Google Scholar] [CrossRef]
- 3GPP. Study on Channel Model for Frequencies from 0.5 to 100 GHz (3GPP TR 38.901 Version 17.0.0 Release 17). Technical Specification (TS) 38.901, 3rd Generation Partnership Project (3GPP), Version 17.0.0. 2022. Available online: https://portal.etsi.org/webapp/workprogram/Report_WorkItem.asp?WKI_ID=65119 (accessed on 10 August 2023).
- Kakkavas, A.; Wymeersch, H.; Seco-Granados, G.; García, M.H.C.; Stirling-Gallacher, R.A.; Nossek, J.A. Power Allocation and Parameter Estimation for Multipath-Based 5G Positioning. IEEE Trans. Wirel. Commun. 2021, 20, 7302–7316. [Google Scholar] [CrossRef]
- Quan, X.; Niu, K.; Dong, C.; Yu, Y. Joint Approximate Maximum Likelihood Localization Algorithm in 5G New Radio Systems. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sellami, A.; Nasraoui, L.; Najjar, L. Analysis of Localization Performance in mm-Wave 5G Network Under Channel Uncertainties. IEEE Internet Things J. 2023, 10, 6523–6524. [Google Scholar] [CrossRef]
- Qi, C.; Wu, L. A hybrid compressed sensing algorithm for sparse channel estimation in MIMO OFDM systems. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 3488–3491. [Google Scholar] [CrossRef]
- Zhou, Y.; Tong, F.; Song, A.; Diamant, R. Exploiting Spatial–Temporal Joint Sparsity for Underwater Acoustic Multiple-Input–Multiple-Output Communications. IEEE J. Ocean. Eng. 2021, 46, 352–369. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Method | Array | ToA | 2D-AoD | 2D-AoA |
|---|---|---|---|---|---|
| [5] | DCS-SOMP | ULA | ✔ | × | × |
| [8] | MUSIC | ULA | ✔ | × | ✔ |
| [10] | SBT | ULA | × | × | × |
| [11] | MUSIC | URA | × | ✔ | ✔ |
| [12] | SSFEAL | UCA | × | × | ✔ |
| Our Proposal | Adaptive DCS-SOMP | UCA | ✔ | ✔ | ✔ |
| Path | (rad) | (rad) | (rad) | (rad) | (us) |
|---|---|---|---|---|---|
| 1 | 1.33 | 0.45 | 3.50 | 0.90 | 0.0615 |
| 2 | 2.80 | 1.15 | 5.20 | 1.45 | 0.0767 |
| Method | Time (s) | Number of Mathematical Operations |
|---|---|---|
| DCS-SOMP | 84.63 | 4.0393 × 109 |
| Adaptive DCS-SOMP | 0.88 | 1.4697 × 109 |
| Method | (rad) | (rad) | (rad) | (rad) | (us) |
|---|---|---|---|---|---|
| DCS-SOMP | 0.1334 | 0.0454 | 0.1087 | 0.2851 | 0.0109 |
| Adaptive DCS-SOMP | 0.0017 | 0.0005 | 0.0089 | 0.0256 | 0.0001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
da Conceição, P.F.; Rocha, F.G.C. Adaptive DCS-SOMP for Localization Parameter Estimation in 5G Networks. Sensors 2023, 23, 9073. https://doi.org/10.3390/s23229073
da Conceição PF, Rocha FGC. Adaptive DCS-SOMP for Localization Parameter Estimation in 5G Networks. Sensors. 2023; 23(22):9073. https://doi.org/10.3390/s23229073
Chicago/Turabian Styleda Conceição, Paulo Francisco, and Flávio Geraldo Coelho Rocha. 2023. "Adaptive DCS-SOMP for Localization Parameter Estimation in 5G Networks" Sensors 23, no. 22: 9073. https://doi.org/10.3390/s23229073
APA Styleda Conceição, P. F., & Rocha, F. G. C. (2023). Adaptive DCS-SOMP for Localization Parameter Estimation in 5G Networks. Sensors, 23(22), 9073. https://doi.org/10.3390/s23229073