

Sensor-Based Wearable Systems for Monitoring Human Motion and Posture: A Review


Abstract
:1. Introduction
2. Review of Literature
3. Monitoring Indicators of Human Motion
3.1. Head and Trunk
3.2. Joints

3.3. Limbs
4. Sensor Technologies for Human Motion Monitoring
4.1. Traditional Silicon-Based Sensors
4.1.1. Accelerometer
4.1.2. Gyroscope
4.1.3. Magnetometer
4.1.4. Inertial Sensors
4.1.5. Tilt Sensor
4.2. Flexible Sensors
4.2.1. Substrates of Flexible Sensors
4.2.2. Flexible Strain and Pressure Sensors
5. Design of Wearable Sensor Systems
5.1. Hardware Design of the Wearable System
5.2. Structural Design of the Monitoring System
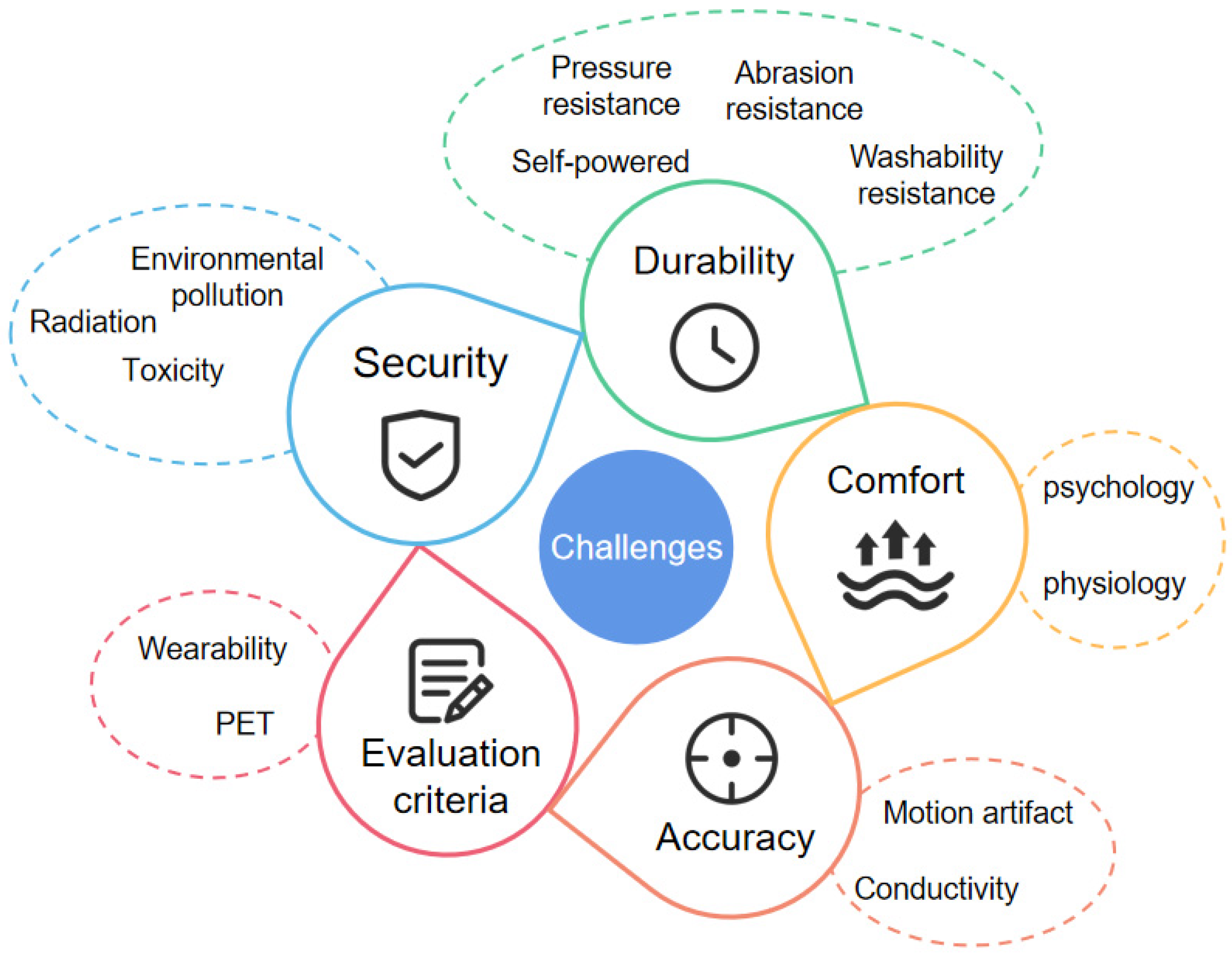
6. Conclusion and Future Prospects
6.1. Security
6.2. Durability
6.3. Comfort
6.4. Accuracy
6.5. Evaluation Criteria
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rafi, M.; Hamid, M.E.; Khan, M.S.; Wahidabanu, R.S.D. A Parametric Approach to Gait Signature Extraction for Human Motion Identification. Int. J. Image Process. 2011, 5, 2011–2185. [Google Scholar]
- Liu, R.; Li, J.M.; Li, M.; Zhang, Q.H.; Shi, G.Y.; Li, Y.G.; Hou, C.Y.; Wang, H.Z. MXene-Coated Air-Permeable Pressure-Sensing Fabric for Smart Wear. ACS Appl. Mater. Int. 2020, 12, 46446–46454. [Google Scholar] [CrossRef]
- Liu, M.; Pu, X.; Jiang, C.; Liu, T.; Huang, X.; Chen, L.; Du, C.; Sun, J.; Hu, W.; Wang, Z.L. Large-Area All-Textile Pressure Sensors for Monitoring Human Motion and Physiological Signals. Adv. Mater. 2017, 29, 1703700. [Google Scholar] [CrossRef]
- Xiong, Y.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C. Fabrication and Application of Flexible Pressure Sensors with Micro/Nano-Structures. Prog. Chem. 2019, 31, 800–810. [Google Scholar]
- Perez, A.J.; Labrador, M.A.; Barbeau, S.J. G-Sense: A Scalable Architecture for Global Sensing and Monitoring. IEEE Netw. 2010, 24, 57–64. [Google Scholar] [CrossRef]
- Liang, D.; Qu, Y. Design and application of motion capture algorithm for wearable sensors in remote rehabilitation. China Med. Devices 2021, 36, 32–35+39. [Google Scholar]
- Meng, Z.; Zhang, M.; Guo, C.; Fan, Q.; Zhang, H.; Gao, N.; Zhang, Z. Recent progress in sensing and computing techniques for human activity recognition and motion analysis. Electronics 2020, 9, 1357. [Google Scholar] [CrossRef]
- Munro, B.J.; Campbell, T.E.; Wallace, G.G.; Steele, J.R. The intelligent knee sleeve: A wearable biofeedback device. Sens. Actuators B Chem. 2008, 131, 541–547. [Google Scholar] [CrossRef]
- Helmer, R.J.N.; Mestrovic, M.A.; Farrow, D.; Lucas, S.; Spratford, W. Smart Textiles: Position and Motion Sensing for Sport, Entertainment and Rehabilitation. Adv. Sci. Technol. 2008, 60, 144–153. [Google Scholar]
- Pang, C.; Lee, C.; Suh, K.Y. Recent advances in flexible sensors for wearable and implantable devices. J. Appl. Polym. Sci. 2013, 130, 1429–1441. [Google Scholar] [CrossRef]
- Wang, F.; Liu, S.; Shu, L.; Tao, X.M. Low-dimensional carbon based sensors and sensing network for wearable health and environmental monitoring. Carbon 2017, 121, 353–367. [Google Scholar] [CrossRef]
- Wang, X.; Tao, X.; So, R.C.; Shu, L.; Yang, B.; Li, Y. Monitoring elbow isometric contraction by novel wearable fabric sensing device. Smart Mater. Struct. 2016, 25, 125022. [Google Scholar] [CrossRef]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-Shoe Plantar Pressure Measurement and Analysis System Based on Fabric Pressure Sensing Array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar]
- StretchSense. Available online: https://stretchsense.com/ (accessed on 28 September 2023).
- Zhang, J.; Bader, D.; Twycross-Lewis, R.; Padhiar, N. A prospective cohort study of vertical pressure on hands of sitting volleyball players using tekscan pressure mat. Br. J. Sports Med. 2011, 45, e1. [Google Scholar] [CrossRef]
- Wilharm, A.; Hurschler, C.; Dermitas, T.; Bohnsack, M. Use of Tekscan K-Scan Sensors for Retropatellar Pressure Measurement Avoiding Errors during Implantation and the Effects of Shear Forces on the Measurement Precision. BioMed Res. Int. 2013, 2013, 829171. [Google Scholar] [CrossRef] [PubMed]
- Zammit, G.V.; Menz, H.B.; Munteanu, S.E. Reliability of the TekScan MatScan®system for the measurement of plantar forces and pressures during barefoot level walking in healthy adults. J. Foot Ankle Res. 2010, 3, 11. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Zhao, W.; Zhang, M.; Qin, H.; Xie, Y. Flexible, stretchable sensors for wearable health monitoring: Sensing mechanisms, materials, fabrication strategies and features. Sensors 2018, 18, 645. [Google Scholar] [CrossRef]
- Chen, H.; Xue, M.; Mei, Z.; Oetomo Bambang, S.; Wei, C. A Review of Wearable Sensor Systems for Monitoring Body Movements of Neonates. Sensors 2016, 16, 2134. [Google Scholar] [CrossRef]
- Lara, O.D.; Labrador, M. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Kristoffersson, A.; Lindén, M. A Systematic Review of Wearable Sensors for Monitoring Physical Activity. Sensors 2022, 22, 573. [Google Scholar] [CrossRef]
- Lopez-Nava, I.H.; Angelica, M.M. Wearable Inertial Sensors for Human Motion Analysis: A Review. IEEE Sens. J. 2016, 15, 1192–1209. [Google Scholar] [CrossRef]
- Prasanth, H.; Caban, M.; Keller, U.; Courtine, G.; Ijspeert, A.; Vallery, H.; Zitzewitz, J. Wearable sensor-based real-time gait detection: A systematic review. Sensors 2021, 21, 2727. [Google Scholar] [CrossRef]
- Tabasi, A.; Brouwer, N.P.; Kingma, I.; van Dijk, W.; de Looze, M.P.; Moya-Esteban, A.; Kooij, H.v.d.; van Dieën, J.H. The effect of back muscle fatigue on EMG and kinematics based estimation of low-back loads and active moments during manual lifting tasks. J. Electromyogr. Kinesiol. 2023, 73, 102815. [Google Scholar] [CrossRef]
- Xiong, P.; Wu, C.; Zhou, H.; Song, A.; Hu, L.; Liu, X.P. Design of an accurate end-of-arm force display system based on wearable arm gesture sensors and EMG sensors. Inf. Fusion 2018, 39, 178–185. [Google Scholar] [CrossRef]
- Khurelbaatar, T.; Kim, K.; Lee, S.; Kim, Y.H. Consistent accuracy in whole-body joint kinetics during gait using wearable inertial motion sensors and in-shoe pressure sensors. Gait Posture 2015, 42, 65–69. [Google Scholar] [CrossRef]
- Rahmani, M.H.; Berkvens, R.; Weyn, M. Chest-worn inertial sensors: A survey of applications and methods. Sensors 2021, 21, 2875. [Google Scholar] [CrossRef]
- Geng, Y.; Chen, J.; Fu, R.; Bao, G.; Pahlavan, K. Enlighten Wearable Physiological Monitoring Systems: On-Body RF Characteristics Based Human Motion Classification Using a Support Vector Machine. IEEE Trans. Mob. Comput. 2016, 15, 656–671. [Google Scholar] [CrossRef]
- Huang, X.; Ao, L. Human Kinematics, 3rd ed.; People’s Medical Publishing: Beijing, China, 2018; pp. 88–178. [Google Scholar]
- Kurban, O.C.; Yldrm, T. Daily Motion Recognition System by a Triaxial Accelerometer Usable in Different Positions. IEEE Sens. J. 2019, 19, 7543–7552. [Google Scholar] [CrossRef]
- Lockman, J.; Fisher, R.S.; Olson, D.M. Detection of seizure-like movements using a wrist accelerometer. Epilepsy Behav. 2011, 20, 638–641. [Google Scholar] [CrossRef] [PubMed]
- Longo, U.G.; Salvatore, S.; Sassi, M.; Carnevale, A.; Luca, G.; Denaro, V. Motion Tracking Algorithms Based on Wearable Inertial Sensor: A Focus on Shoulder. Electronics 2022, 11, 1741. [Google Scholar] [CrossRef]
- Chih-Yen, C.; Kun-Hui, C.; Kai-Chun, L.; Steen, H.; Chia-Tai, C. Data Collection and Analysis Using Wearable Sensors for Monitoring Knee Range of Motion after Total Knee Arthroplasty. Sensors 2017, 17, 418. [Google Scholar]
- Brabandere, A.; Emmerzaal, J.; Timmermans, A.; Jonkers, I.; Vanwanseele, B.; Davis, J. A machine learning approach to estimate hip and knee joint loading using a mobile phone-embedded IMU. Front. Bioeng. Biotechnol. 2020, 8, 320. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.P.; Liu, Y.Y.; Hsu, W.H.; Lai, L.J.; Lee, M.S. Monitoring and assessment of rehabilitation progress on range of motion after total knee replacement by sensor-based system. Sensors 2020, 20, 1703. [Google Scholar] [CrossRef]
- Chuang, W.C.; Chen, W.L. Real-Time Monitoring for Knee Extensor Muscle Training with Flexible Sensors. J. Microelectromech. Syst. 2019, 28, 1005–1012. [Google Scholar] [CrossRef]
- Khalvat, A.; Razavizadeh, M. A prospective cross-sectional study of joint motion in healthy adult subjects. Acta Med. Iran. 2005, 43, 151–154. [Google Scholar]
- Arslan, A.; Polat, M.; Ciliz, A.; Utkan, A. Immediate Knee Joint Range of Motion after Stable Fixation of Tibial Plateau Fractures. Open J. Orthop. 2015, 5, 198–207. [Google Scholar] [CrossRef]
- Nguyen, V.V.; Lee, J.H. In Full-body imitation of human motions with kinect and heterogeneous kinematic structure of humanoid robot. In Proceedings of the 2012 IEEE/SICE International Symposium on System Integration (SII), Fukuoka, Japan, 16–18 December 2012; IEEE: New York, NY, USA, 2012; pp. 93–98. [Google Scholar]
- Novii, M.M.; Jankovi, M.M.; Kvaev, G.S.; Popovi, M.B. Classification of forearm movements based on kinematic parameters using artificial neural networks. In Proceedings of the 2017 25th Telecommunication Forum (TELFOR), Belgrade, Serbia, 21–22 November 2017; IEEE: New York, NY, USA, 2017; pp. 1–4. [Google Scholar]
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Sulaiman, O.B.; Dong, B.; Lee, C. Development trends and perspectives of future sensors and MEMS/NEMS. Micromachines 2019, 11, 7. [Google Scholar] [CrossRef] [PubMed]
- Sun, C. Research on Human Motion Monitonng Based on Acceleration Sensor. Master’s Thesis, Suzhou University, Suzhou, China, 2019. [Google Scholar]
- Chen, L.; Li, R.; Zhang, H.; Tian, L.L.; Chen, N. Intelligent fall detection method based on accelerometer data from a wrist-worn smart watch. Measurement 2019, 140, 215–226. [Google Scholar] [CrossRef]
- Avvenuti, M.; Carbonaro, N.; Cimino, M.G.C.A.; Cola, G.; Tognetti, A.; Vaglini, G. Smart Shoe-Assisted Evaluation of Using a Single Trunk/Pocket-Worn Accelerometer to Detect Gait Phases. Sensors 2018, 18, 3811. [Google Scholar] [CrossRef] [PubMed]
- Jala, A.; Quaid, M.A.K.; Kim, K. A Wrist Worn Acceleration Based Human Motion Analysis and Classification for Ambient Smart Home System. J. Electr. Eng. Technol. 2019, 14, 1733–1739. [Google Scholar] [CrossRef]
- Khan, A.M.; Lee, Y.K.; Lee, S.; Kim, T.S. Accelerometer’s position independent physical activity recognition system for long-term activity monitoring in the elderly. Med. Biol. Eng. Comput. 2010, 48, 1271–1279. [Google Scholar] [CrossRef] [PubMed]
- Nam, Y.; Park, J.W. Child Activity Recognition Based on Cooperative Fusion Model of a Triaxial Accelerometer and a Barometric Pressure Sensor. IEEE J. Biomed. Health Inf. 2013, 17, 420–426. [Google Scholar]
- Bonomi, A.G.; Plasqui, G.; Goris, A.H.C.; Westerterp, K.R. Improving assessment of daily energy expenditure by identifying types of physical activity with a single accelerometer. J. Appl. Physiol. 2009, 107, 655–661. [Google Scholar] [CrossRef]
- Ye, Z.; Li, Y.; Zhao, Q.; Liu, X. A Falling Detection System with wireless sensor for the Elderly People Based on Ergnomics. Int. J. Smart Home 2014, 8, 187–196. [Google Scholar] [CrossRef]
- Wen-Sheng, H.; Jia-Man, D.; Xiao-Lin, Z.; Qin, Y.; Xiao-Ying, W.U.; Rong, X.U. Detection of human upper limb motion gesture based on acceleration sensor. Transducer Microsyst. Technol. 2009, 28, 106–108. [Google Scholar]
- Chen, Y.; Wang, Z.; Li, Z.; Li, H. Human daily activity recognition method based on BSN and neural network. J. Dalian Univ. Technol. 2013, 53, 893–897. [Google Scholar]
- Li, J.; Chi, Z.; Li, Z. Human fall detection system based on threshold analysis method. Transducer Microsyst. Technol. 2019, 38, 80–82+86. [Google Scholar]
- Hong, J.; Zhao, Z. A Research Method of Human Upper Limb Motion Recognition Based on Acceleration Signal. Mach. Tool Hydraul. 2014, 42, 50–53. [Google Scholar]
- Cui, J.; Cao, H.; Zhu, J.; Jiang, J.; Zhang, Y. Human gait monitoring system based on MEMS tilt sensors and thin film pressure sensors. China Meas. Test. 2018, 44, 70–75. [Google Scholar]
- Ji, T.; Cong, S. Research Progress and Development Trend of Smart Health Monitoring Clothing. Knitt. Ind. 2021, 3, 82–85. [Google Scholar]
- Guo, T.; Wei, M.; Wang, C. Design of Portable Wireless Angle Sensor Measurement System. Instrum. Tech. Sens. 2016, 8, 5–8+13. [Google Scholar]
- Chen, J. Research and Design of Wearable Body Posture Monitoring System. Master’s Thesis, Central South University, Changsha, China, 2014. [Google Scholar]
- Su, B. The Design and Implementation of Human Posture Monitoring System Based on Accelerometer. Master’s Thesis, Northeastern University, Liaoning, China, 2011. [Google Scholar]
- Xue, Y. Research on Human Posture Recognition System Based on Accelerometer. Master’s Thesis, Hebei University of Science & Technology, Shijiazhuang, China, 2014. [Google Scholar]
- Chen, T.; Zhang, X.; Xu, J.; Li, J. System for Fall Monitoring Based on 3-Axis Accelerometer and Electronic Compass. Meas. Control Technol. 2015, 34, 16–19. [Google Scholar]
- Hsu, Y.L.; Wang, J.S.; Lin, Y.C.; Chen, S.M.; Tsai, Y.J.; Chu, C.L.; Chang, C.W. A wearable inertial-sensing-based body sensor network for shoulder range of motion assessment. In Proceedings of the 2013 1st International Conference on Orange Technologies (ICOT), Tainan, Taiwan, 12–16 March 2013; IEEE: New York, NY, USA, 2013; pp. 328–331. [Google Scholar]
- Ngo, T.T.; Makihara, Y.; Nagahara, H.; Mukaigawa, Y.; Yagi, Y. The largest inertial sensor-based gait database and performance evaluation of gait-based personal authentication. Pattern Recognit. 2014, 47, 228–237. [Google Scholar] [CrossRef]
- Trung, N.T.; Makihara, Y.; Nagahara, H.; Sagawa, R.; Mukaigawa, Y.; Yagi, Y. Phase registration in a gallery improving gait authentication. In Proceedings of the 2011 International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; IEEE: New York, NY, USA, 2011; pp. 1–7. [Google Scholar]
- Slade, P.; Habib, A.; Hicks, J.L.; Delp, S.L. An open-source and wearable system for measuring 3D human motion in real-time. IEEE Trans. Biomed. Eng. 2021, 99, 678–688. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhang, X.; Mu, X.; Han, H. Research on the prediction method of elderly fall-down for elderly-assistant and walking-assistant robot. J. Electron. Meas. Instrum. 2018, 32, 1–7. [Google Scholar]
- Lu, P.; Jia, F.; Qie, J. MEMS-based human-body posture classification and monitoring system for patients suffering from Parkinson’s disease. Acta Autom. Sin. 2017, 40, 161–164+169. [Google Scholar]
- Liu, S.Q.; Zhang, J.C.; Li, G.Z.; Zhu, R. A Wearable Flow-MIMU Device for Monitoring Human Dynamic Motion. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 99, 637–645. [Google Scholar] [CrossRef] [PubMed]
- Gochoo, M.; Tahir, S.B.U.D.; Jalal, A.; Kim, K. Monitoring Real-Time Personal Locomotion Behaviors Over Smart Indoor-Outdoor Environments Via Body-Worn Sensors. IEEE Access 2021, 9, 70556–70570. [Google Scholar] [CrossRef]
- Sun, J.; Meng, X.; Liang, H.; Duan, H.; Zhan, Z. Gymnastics motion recognition based on MEMS sensor. J. Electron. Meas. Instrum. 2020, 34, 94–99. [Google Scholar]
- Motoi, K.; Taniguchi, S.; Baek, M.; Wakugawa, M.; Sonoda, T.; Yuji, T.; Higashi, Y.; Fujimoto, T.; Ogawa, M.; Tanaka, S. Development of a wearable gait monitoring system for evaluating efficacy of walking training in rehabilitation. Sens. Mater. 2012, 24, 59–373. [Google Scholar]
- Wang, Z.; Li, L. Study on Signal Processing of Leg Tilt Sensor of Legged Robot. Chin. J. Sens. Actuators 2018, 31, 710–714. [Google Scholar]
- Bai, Z.; Wang, X.; Zheng, M.; Yue, O.; Huang, M.; Zou, X.; Cui, B.; Xie, L.; Dong, S.; Shang, J. Mechanically Robust and Transparent Organohydrogel-Based E-Skin Nanoengineered from Natural Skin. Adv. Funct. Mater. 2023, 33, 2212856. [Google Scholar] [CrossRef]
- Wang, X.; Yu, H.; Kold, S.; Rahbek, O.; Bai, S. Wearable sensors for activity monitoring and motion control: A review. Biomim. Intell. Robot. 2023, 3, 100089. [Google Scholar] [CrossRef]
- Duan, L.; D’Hooge, D.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2019, 114, 100617. [Google Scholar] [CrossRef]
- Yang, T.; Xie, D.; Li, Z.; Zhu, H. Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance. Mater. Sci. Eng. R Rep. 2017, 115, 1–37. [Google Scholar] [CrossRef]
- Li, X.; Hu, H.; Hua, T.; Xu, B.; Jiang, S. Wearable strain sensing textile based on one-dimensional stretchable and weavable yarn sensors. Nano Res. 2018, 11, 5799–5811. [Google Scholar] [CrossRef]
- Roh, J.S. Wearable Textile Strain Sensors. Fash. Text. Res. J. 2016, 18, 733–745. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, S.; Zhang, X.; Jia, P.; Tian, S.S.; Pan, C.; Zeng, F.P.; Chen, D.C.; Chen, Y.Y.; Tang, J.; et al. Silk inspired in-situ interlocked superelastic microfibers for permeable stretchable triboelectric nanogenerator. Nano Energy 2022, 98, 107347. [Google Scholar] [CrossRef]
- Afroj, S.; Karim, N.; Wang, Z.; Tan, S.; He, P.; Holwill, M.; Ghazaryan, D.; Fernando, A.; Novoselov, K.S. Engineering graphene flakes for wearable textile sensors via highly scalable and ultrafast yarn dyeing technique. ACS Nano 2019, 13, 3847–3857. [Google Scholar] [CrossRef]
- Lu, N.; Chi, L.; Yang, S.; Rogers, J. Highly Sensitive Skin-Mountable Strain Gauges Based Entirely on Elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Madhvapathy, S.R.; Ma, Y.; Patel, M.; Krishnan, S.; Wei, C.; Li, Y.; Xu, S.; Feng, X.; Huang, Y.; Rogers, J.A. Epidermal Electronic Systems for Measuring the Thermal Properties of Human Skin at Depths of up to Several Millimeters. Adv. Funct. Mater. 2018, 28, 1802083. [Google Scholar] [CrossRef]
- Yang, Q.; Lee, S.; Xue, Y.; Yan, Y.; Rogers, J.A. Materials, Mechanics Designs, and Bioresorbable Multisensor Platforms for Pressure Monitoring in the Intracranial Space. Adv. Funct. Mater. 2020, 30, 1910718. [Google Scholar] [CrossRef]
- Kwak, S.S.; Yoo, S.; Avila, R.; Chung, H.U.; Jeong, H.; Liu, C.; Vogl, J.L.; Kim, J.; Yoon, H.J.; Park, Y.; et al. Skin-Integrated Devices with Soft, Holey Architectures for Wireless Physiological Monitoring, With Applications in the Neonatal Intensive Care Unit. Adv. Mater. 2021, 33, 2103974. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Li, Z.; Chen, M.; Zhu, T.; Wu, L. Ultrasensitive and Ultraprecise Pressure Sensors for Soft Systems. Adv. Mater. 2023, 35, e2210091. [Google Scholar] [CrossRef]
- Bai, Y.; Lu, Y.; Bi, S.; Wang, W.; Lin, F.; Zhu, F.; Yang, P.; Ding, N.; Liu, S.; Zhao, W. Stretchable and Photothermal MXene/PAA Hydrogel in Strain Sensor for Wearable Human-Machine Interaction Electronics. Adv. Mater. Technol. 2023, 8, 2201767. [Google Scholar] [CrossRef]
- Wang, H.; Sun, X.; Wang, Y.; Li, K.; Wang, J.; Dai, X.; Chen, B.; Chong, D.; Zhang, L.; Yan, J. Acid enhanced zipping effect to densify MWCNT packing for multifunctional MWCNT films with ultra-high electrical conductivity. Nat. Commun. 2023, 14, 380. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Huang, Z.; Ye, C.M. Graphene-Based Hydrogel Strain Sensors with Excellent Breathability for Motion Detection and Communication. Macromol. Mater. Eng. 2022, 8, 307. [Google Scholar] [CrossRef]
- Benight, S.J.; Wang, C.; Tok, J.B.H.; Bao, Z. Stretchable and self-healing polymers and devices for electronic skin. Prog. Polym. Sci. 2013, 38, 1961–1977. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, L.; Tu, Y.; Zhang, Q.; Peng, F.; Zeng, W.; Zhang, M.; Tao, X. Wearable self-powered human motion sensors based on highly stretchable quasi-solid state hydrogel. Nano Energy 2021, 88, 106272. [Google Scholar] [CrossRef]
- Gao, Q.; Sun, F.Q.; Li, Y.; Li, L.H.; Liu, M.Y.; Wang, S.Q.; Wang, Y.F.; Li, T.; Liu, L.; Feng, S.M.; et al. Biological Tissue-Inspired Ultrasoft, Ultrathin, and Mechanically Enhanced Microfiber Composite Hydrogel for Flexible Bioelectronics. Nano-Micro Lett. 2023, 15, 139. [Google Scholar] [CrossRef]
- Matsuhisa, N.; Inoue, D.; Zalar, P.; Jin, H.; Matsuba, Y.; Itoh, A.; Yokota, T.; Hashizume, D.; Someya, T. Printable elastic conductors by in situ formation of silver nanoparticles from silver flakes. Nat. Mater. 2017, 16, 834–840. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Liu, C.; Lin, X.; Zheng, J.; Wu, J.; Liu, C. Dual conductive network hydrogel for a highly conductive, self-healing, anti-freezing, and non-drying strain sensor. ACS Appl. Polym. Mater. 2020, 2, 996–1005. [Google Scholar] [CrossRef]
- Yu, J.B.; Xian, S.; Zhang, Z.P.; Hou, X.J.; He, J.; Mu, J.L.; Geng, W.P.; Qiao, X.J.; Zhang, L.; Chou, X.J. Synergistic piezoelectricity enhanced BaTiO3/polyacrylonitrile elastomer-based highly sensitive pressure sensor for intelligent sensing and posture recognition applications. Nano Res. 2023, 16, 5490–5502. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Lee, K.H.; Anjum, D.H.; Sougrat, R.; Jiang, Q.; Kim, H.; Alshareef, H.N. MXenes stretch hydrogel sensor performance to new limits. Sci. Adv. 2018, 4, eaat0098. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lu, C.; Zhang, K. Textile-based strain sensor for human motion detection. Energy Environ. Mater. 2020, 3, 80–100. [Google Scholar] [CrossRef]
- Sun, Q.; Seung, W.; Kim, B.J.; Seo, S.; Kim, S.W.; Cho, J.H. Active matrix electronic skin strain sensor based on piezopotential-powered graphene transistors. Adv. Mater. 2015, 27, 3411–3417. [Google Scholar] [CrossRef]
- Zhou, J.; Gu, Y.; Fei, P.; Mai, W.; Gao, Y.; Yang, R.; Bao, G.; Wang, Z.L. Flexible piezotronic strain sensor. Nano Lett. 2008, 8, 3035–3040. [Google Scholar] [CrossRef]
- Ryu, S.; Lee, P.; Chou, J.B.; Xu, R.; Zhao, R.; Hart, A.J.; Kim, S.G. Extremely elastic wearable carbon nanotube fiber strain sensor for monitoring of human motion. ACS Nano 2015, 9, 5929–5936. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, R.; Sun, J.; Gao, L. A stretchable and highly sensitive graphene-based fiber for sensing tensile strain, bending, and torsion. Adv. Mater. 2015, 27, 7365–7371. [Google Scholar] [CrossRef]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Highly stretchable piezoresistive graphene–nanocellulose nanopaper for strain sensors. Adv. Mater. 2014, 26, 2022–2027. [Google Scholar] [CrossRef]
- Yuan, W.; Zhou, Q.; Li, Y.; Shi, G. Small and light strain sensors based on graphene coated human hairs. Nanoscale 2015, 7, 16361–16365. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Huang, Y.; Sun, J.; Huang, Y.; Hu, H.; Jiang, R.; Gai, W.; Li, G.; Zhi, C. Polyurethane/cotton/carbon nanotubes core-spun yarn as high reliability stretchable strain sensor for human motion detection. ACS Appl. Mater. Int. 2016, 8, 24837–24843. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Han, Y.; Zhang, X.; Lu, C. Highly sensitive, stretchable, and wash-durable strain sensor based on ultrathin conductive layer@ polyurethane yarn for tiny motion monitoring. ACS Appl. Mater. Int. 2016, 8, 9936–9945. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, N.; Shi, Y.; Liu, W.; Yue, Y.; Wang, S.; Ma, Y.; Wen, L.; Li, L.; Long, F. Piezoresistive sensor with high elasticity based on 3D hybrid network of sponge@ CNTs@ Ag NPs. ACS Appl. Mater. Int. 2016, 8, 22374–22381. [Google Scholar] [CrossRef]
- Coyle, S.; Wu, Y.; Lau, K.T.; Rossi, D.; Wallace, G.; Diamond, D. Smart nanotextiles: A review of materials and applications. MRS Bull. 2007, 32, 434–442. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Mattmann, C.; Clemens, F.; Tröster, G. Sensor for measuring strain in textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Wang, C.; Wang, Q.; Jian, M.; Zhang, Y. Sheath–core graphite/silk fiber made by dry-meyer-rod-coating for wearable strain sensors. ACS Appl. Mater. Int. 2016, 8, 0894–20899. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Gao, E.; Jian, M.; Xia, K.; Wang, Q.; Xu, Z.; Ren, T.; Zhang, Y. Carbonized silk fabric for ultrastretchable, highly sensitive, and wearable strain sensors. Adv. Mater. 2016, 28, 6640–6648. [Google Scholar] [CrossRef]
- Kong, J.H.; Jang, N.S.; Kim, S.H.; Kim, J.M. Simple and rapid micropatterning of conductive carbon composites and its application to elastic strain sensors. Carbon 2014, 77, 199–207. [Google Scholar] [CrossRef]
- Liu, S.; Ma, K.; Yang, B.; Li, H.; Tao, X. Textile electronics for VR/AR applications. Adv. Funct. Mater. 2021, 31, 2007254. [Google Scholar] [CrossRef]
- Zhu, M.; Lou, M.; Abdalla, I.; Yu, J.; Li, Z.; Ding, B. Highly shape adaptive fiber based electronic skin for sensitive joint motion monitoring and tactile sensing. Nano Energy 2020, 69, 104429. [Google Scholar] [CrossRef]
- Shu, L. Wearable Body Area Sensor Networks for Continuous Dynamic Health Monitoring in Daily Activities: Case Study of Intelligent Footwear System. Ph.D. Thesis, The Hong Kong Polytechnic University, Hong Kong, 2012. [Google Scholar]
- Wang, C.; Kim, Y.; Shin, H.; Min, S.D. Preliminary clinical application of textile insole sensor for hemiparetic gait pattern analysis. Sensors 2019, 19, 3950. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Sundholm, M.; Cheng, J.; Cruz, H.; Lukowicz, P. Measuring muscle activities during gym exercises with textile pressure mapping sensors. Pervasive Mob. Comput. 2017, 38, 331–345. [Google Scholar] [CrossRef]
- Cheng, H.; Xu, B.; Yang, K.; Yin, Y.J.; Wang, C. High-Sensitivity, Long-Durability, and Wearable Pressure Sensor Based on the Polypyrrole/Reduced Graphene Oxide/(Fabric–Sponge–Fabric) for Human Motion Monitoring. Macromol. Mater. Eng. 2022, 307, 2100801. [Google Scholar] [CrossRef]
- Yu, J.B.; Xian, S.; Mu, J.B.; Wang, M.; Wang, Y.; Hou, X.J.; Zhang, L.; He, J.; Mu, J.L.; Chou, X.J. Hybrid electromechanical properties of hetero-doped and homogeneously bonded dual-mode pressure sensor for indoor body area network node. Sci. China Inf. Sci. 2023, 67, 112401. [Google Scholar] [CrossRef]
- Ganesan, Y.; Gobee, S.; Durairajah, V. Development of an Upper Limb Exoskeleton for Rehabilitation with Feedback from EMG and IMU Sensor. Procedia Comput. Sci. 2015, 76, 53–59. [Google Scholar] [CrossRef]
- Yu, J.; Hou, X.; Cui, M.; Shi, S.; He, J.; Sun, Y.; Wang, C.; Chou, X. Flexible PDMS-based triboelectric nanogenerator for instantaneous force sensing and human joint movement monitoring. Sci. China Mater. 2019, 62, 1423–1432. [Google Scholar] [CrossRef]
- Esfahani, M.I.M.; Akbari, A.; Zobeiri, O.; Rashedi, E.; Parnianpour, M. Sharif-Human movement instrumentation system (SHARIF-HMIS): Development and validation. Med. Eng. Phys. 2018, 61, 87–94. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, B.; Zheng, X. Design of wearable intelligent monitoring clothing for infants. J. Text. Res. 2021, 42, 156–160. [Google Scholar]
- Zhang, Y. Study on Interaction Design of Infant Wearable Products. Ornament 2017, 8, 126–127. [Google Scholar]
- YiDaiBao. Available online: https://zgznhh.com/ (accessed on 28 September 2023).
- Anderson, W.; Choffin, Z.; Jeong, N.; Callihan, M.; Jeong, S.; Sazonov, E. Empirical Study on Human Movement Classification Using Insole Footwear Sensor System and Machine Learning. Sensors 2022, 22, 2743. [Google Scholar] [CrossRef] [PubMed]
- Eom, J.; Jaisutti, R.; Lee, H.; Lee, W.; Heo, J.S.; Lee, J.Y.; Park, S.K.; Kim, Y.H. Highly Sensitive Textile Strain Sensors and Wireless User-Interface Devices Using All-Polymeric Conducting Fibers. ACS Appl. Mater. Interfaces 2017, 9, 10190–10197. [Google Scholar] [CrossRef] [PubMed]
- Wicaksono, I.; Tucker, C.I.; Sun, T.; Guerrero, C.A.; Liu, C.; Woo, W.M.; Pence, E.J.; Dagdeviren, C. A tailored, electronic textile conformable suit for large-scale spatiotemporal physiological sensing in vivo. npj Flex. Electron. 2020, 4, 5. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, Z.; Yu, T.; Sun, X. Micro measurement system for tracking human body motion. J. Tsinghua Univ. 2003, 11, 1464–1467+1471. [Google Scholar]
- Yu, B. Research and Development of a Wearable Sensing System Used to Monitor Human Trunk Sway. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2016. [Google Scholar]
- Pang, W.; Yi, J.; Jia, S.; Xie, G. Preparation and characteristics of flexible pressure film sensor. Electron. Compon. Mater. 2020, 39, 53–57+76. [Google Scholar]
- Cook, D.J.; Thompson, J.E.; Prinsen, S.K.; Dearani, J.A.; Deschamps, C. Functional Recovery in the Elderly After Major Surgery: Assessment of Mobility Recovery Using Wireless Technology. Ann. Thorac. Surg. 2013, 96, 1057–1061. [Google Scholar] [CrossRef] [PubMed]
- Yoram, B.; Ruben, L. Gait improvement in patients with cerebral palsy by visual and auditory feedback. Neuromodulation J. Int. Neuromodulation Soc. 2012, 15, 48–52. [Google Scholar]
- Kang, T.; Shen, L.; Zhou, S. Research on intelligent clothing design for the elderly with fall prevention detection and early warning. Wool Text. J. 2021, 49, 70–75. [Google Scholar]
- Taffoni, F.; Focaroli, V.; Formica, D.; Gugliemelli, E.; Keller, F.; Iverson, J.M. Sensor-based technology in the study of motor skills in infants at risk for ASD. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012. [Google Scholar]
- Smith, B.A.; Trujillo-Priego, I.A.; Lane, C.J.; Finley, J.M.; Horak, F.B. Daily Quantity of Infant Leg Movement: Wearable Sensor Algorithm and Relationship to Walking Onset. Sensors 2015, 15, 19006–19020. [Google Scholar] [CrossRef]
- Farooq, M.; Chandler-Laney, P.C.; Hernandez-Reif, M.; Sazonov EMuhammad, F.; Paula, C.C.; Maria, H.; Edward, S. Monitoring of infant feeding behavior using a jaw motion sensor. J. Healthc. Eng. 2015, 6, 23–40. [Google Scholar] [CrossRef] [PubMed]
- Emily, R.; Panagiotis, P.; Conor, W.; Eugene, G. Smart and Connected Actuated Mobile and Sensing Suit to Encourage Motion in Developmentally Delayed Infants. J. Med. Devices 2015, 9, 030914. [Google Scholar]
- Andraž, R.; Matjaž, M.; Jure, P.; Janko, K.; Marko, M. Infant trunk posture and arm movement assessment using pressure mattress, inertial and magnetic measurement units (IMUs). J. Neuroeng. Rehabil. 2014, 11, 133. [Google Scholar]
- Abney, D.H.; Warlaumont, A.S.; Haussman, A.; Ross, J.M.; Wallot, S. Using Nonlinear Methods to Quantify Changes in Infant Limb Movements and Vocalizations. Front. Psychol. 2014, 5, 771. [Google Scholar] [CrossRef] [PubMed]
- Servati, A.; Zou, L.; Jane Wang, Z.; Ko, F.; Servati, P. Novel flexible wearable sensor materials and signal processing for vital sign and human activity monitoring. Sensors 2017, 17, 1622. [Google Scholar] [CrossRef]
- Huang, J.; Hao, Y.; Zhao, M.; Qiao, H.; Huang, F.; Li, D.; Wei, Q. Biomass-based wearable and Self-powered pressure sensor for human motion detection. Compos. Part A Appl. Sci. Manuf. 2021, 146, 106412. [Google Scholar] [CrossRef]
- Li, J.; Yin, J.; Wee, M.G.V.; Chinnappan, A.; Ramakrishna, S. A Self-Powered Piezoelectric Nanofibrous Membrane as Wearable Tactile Sensor for Human Body Motion Monitoring and Recognition. Adv. Fiber Mater. 2023, 5, 1417–1430. [Google Scholar] [CrossRef]
- Wen, N.; Zhang, L.; Jiang, D.; Wu, Z.; Li, B.; Sun, C.; Guo, Z. Emerging flexible sensors based on nanomaterials: Recent status and applications. J. Mater. Chem. A 2020, 8, 25499–25527. [Google Scholar] [CrossRef]
- Gao, Y.; Li, Q.; Dong, A.; Wang, F.; Wang, X. Characterizing the Resistance Relaxation of the Fabric-based Resistive Sensors Based on an Electro-mechanical Model. Sens. Actuators B Chem. 2020, 310, 310. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Y.; Jiang, S.; Li, T.; Ding, X.; Tao, X.; Wang, X. Investigation into tensile hysteresis of polyurethane-containing textile substrates for coated strain sensors. Mater. Des. 2020, 188, 108451. [Google Scholar] [CrossRef]
- Wang, X.; Yang, B.; Qiao, L.I.; Wang, F.; Tao, X.M. Modeling the Stress and Resistance Relaxation of Conductive Composites-coated Fabric Strain Sensors. Compos. Sci. Technol. 2021, 204, 108645. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Body Parts | Joint | Direction of Motion | Action | |
|---|---|---|---|---|
| No. | Angle/(°) | |||
| Head | Vertebral column | Levorotation | HE1 | 55 |
| Dextrorotation | HE2 | 55 | ||
| Flexion | HE3 | 40 | ||
| Hyperextension | HE4 | 50 | ||
| Right lateral flexion | HE5 | 40 | ||
| Left lateral flexion | HE6 | 40 | ||
| Trunk | Vertebral column | Flexion | TR1 | 100 |
| Hyperextension | TR2 | 50 | ||
| Left lateral flexion | TR3 | 50 | ||
| Right lateral flexion | TR4 | 50 | ||
| Hands | Wrist joints | Extension | HA1 | 65 |
| Flexion | HA2 | 75 | ||
| Adduction | HA3 | 30 | ||
| Abduction | HA4 | 15 | ||
| External rotation | HA5 | 90 | ||
| Internal rotation | HA6 | 80 | ||
| Forearms | Elbow joints | Flexion | FO1 | 145 |
| Extension | FO2 | 0 | ||
| Calves | Knee joints | Flexion | C1 | 135 |
| Extension | C2 | 0 | ||
| Upper arms | Shoulder joints | Flexion | U1 | 180 |
| Extension | U2 | 45 | ||
| Horizontal abduction | U3 | 40 | ||
| Horizontal adduction | U4 | 140 | ||
| Abduction | U5 | 180 | ||
| Adduction | U6 | 45 | ||
| Thighs | Hip joint | Flexion | TH1 | 120 |
| Extension | TH2 | 45 | ||
| Abduction | TH3 | 45 | ||
| Adduction | TH4 | 40 | ||
| Internal rotation | TH5 | 35 | ||
| External rotation | TH6 | 30 | ||
| Feet | Ankle joints | Dorsiflexion | FE1 | 20 |
| Plantar flexion | FE2 | 45 | ||
| Adduction | FE3 | 45 | ||
| Abduction | FE4 | 50 | ||
| Model | Company | Size (Length × Width × Thickness) (mm × mm × mm) | Range of Measurement (g) | Sampling Rate (Hz) | Application Areas |
|---|---|---|---|---|---|
| ADXL330 Triaxial Accelerometer [51] | ADI, Norwood, MA, USA | 4 × 4 × 1.45 | ±3 | 100 | Waist and thighs |
| ADXL345 Triaxial Accelerometer [52,53,54,55,56] | ADI, Norwood, MA, USA | 3 × 5 × 1 | ±2 | 50, 100 | Abdomen, upper limbs, thighs, and calves |
| ADXL362 Accelerometer [57] | ADI, Norwood, MA, USA | 3 × 3.25 × 1 | ±2 | 100, 400 | Waist, thighs, and calves |
| MMA7260 3-axis Accelerometer [46,58] | Freescale, Austin, TX, USA | 6 × 6 × 1.45 | ±1.5 | \ | Chest pockets, waist, left and right front pant pockets, back pant pockets, and the inside of the jacket |
| LIS3DH Triaxial Accelerometer [59] | STMicroelectronics, Geneva, Switzerland | 3 × 3 × 1 | ±2 | 100 | Android phones |
| MMA8453 3-axis Accelerometer [60] | Freescale, Austin, TX, USA | 3 × 3 × 1 | ±2 | 1.56–800 | Trunk |
| Model | Company | Number of Axes | Size (Length × Width × Thickness) (mm × mm × mm) | Range of Measurement (dps) | Sampling Rate (Hz) | Application Area |
|---|---|---|---|---|---|---|
| L3G4200D | STMicroelectronics, Geneva, Switzerland [61] | 3 | 4 × 4 × 1 | ±2000 | 100, 800 | Forearms and upper arms |
| IMUZ | ZMP, Tokyo, Japan [62] | 6 | 21 × 21 × 22 | ±500 | 100 | Waist |
| 3DM-GX3-25 | Honeywell, Morris, NJ, USA [63] | 9 | 44 × 25 × 11 | ±300 | 100 | Backpack handle |
| ISM330DHCX | STMicroelectronics, Geneva, Switzerland [64] | 6 | 2.5 × 3 × 0.83 | ±4000 | 12.5–6700 | Upper arms, forearms, hands, and trunk |
| Model | Company | Size (Length × Width × Thickness) (mm × mm × mm) | Application Areas |
|---|---|---|---|
| MPU6050 3-axis acceleration Gauges and Gyroscopes [54,65,66] | InvenSense, Sunnyvale, CA, USA | 4 × 4 × 0.9 | Chest, abdomen, wrists, thighs, calves, and feet |
| Flow-MIMU 3-axis accelerometer and gyroscope [67] | \ | \ | Wrists and calves |
| YD122 Inertial Sensor [6] | Hundred Years Xukang Medical Equipment Co. Chengdu, Sichuan, China | \ | Chest, thighs, calves, upper arms, and forearms |
| MPU9250 Inertial Sensor [68] | InvenSense, Sunnyvale, CA, USA | 3 × 3 × 1 | Chest, thighs, and wrists |
| BMI160 Inertial Sensor [43] | Bosch, Stuttgart, Germany | 2.5 × 3 × 0.8 | Smart Watch |
| MPU6500 Inertial Sensor [69] | InvenSense, Sunnyvale, CA, USA | 3 × 3 × 0.9 | Thighs, wrists, and ankle joints |
| Application Scenarios | Monitoring Objectives | Hardware Design | System Architecture Design | ||
|---|---|---|---|---|---|
| Sensors and Numbers | Monitoring Accuracy | Location | Connections | ||
| Sports detection and monitoring of adults | For the measurement of human posture and movement [127] | A microelectromechanical sensor (consisting of an accelerometer and a magnetometer) | \ | On two connected limbs | \ |
| Upper limb movement recognition [53] | One ADXL345 triaxial accelerometer | \ | Upper limb (left or right limb) | Strap bondage | |
| Monitoring human trunk movements [128] | A sensing system consisting of an accelerometer, gyroscope, and magnetometer | The root mean square error is 1.81 ± 0.77° | Dorsal T9 to T10 at the thoracic vertebrae | Sticky | |
| Monitoring the body’s motion posture during high dynamic motion [67] | Two Flow-MIMU motion capture devices (consisting of a three-axis accelerometer and a three-axis gyroscope) | Much lower drift rate in limb roll angle and pitch angle | Wrist and calf | Strap bondage | |
| Human motion detection and recognition [45] | A triaxial accelerometer | Recognition accuracy of 85.17% | Wrist | \ | |
| Identify the seven movements of the human body in daily life [51] | Two sensor modules (tri-axis acceleration sensing) (composed of ADXL330 and a microgyroscope) | Recognition accuracy reached 91.22% | On the waist and thigh | Upper thigh straps, waist belt | |
| Monitoring exoskeleton gait [54] | 5 × MPU-6050 type 6-axis MEMS inertial sensors | \ | Abdomen, upper one-third of the thighs and lower one-third of the calves | Waist belt, leg velcro straps | |
| Characterize human motion posture [42] | Four BWT901-type nine-axis attitude sensors (gyroscope, accelerometer, geomagnetic field sensor composition) | \ | Both wrists and ankles | Taping | |
| Human posture monitoring [57] | Five MEMS sensors (consisting of an accelerometer, magnetometer, and barometer) | \ | Waist and left and right forearms near the wrist joint, left and right calves near the ankle joint | Belts and straps | |
| Monitoring of joint and micro-muscle movements [104] | Three flexible strain sensors | \ | Knees and arms | Film adhesion | |
| Health Diagnosis [129] | A flexible pressure sensor | High sensitivity (10.1(kPa−1)) | Back of hand or index finger | Medical tape bonding | |
| Monitoring foot conditions during daily activities [113] | Six textile sensors (three on the front foot and three on the heel) | Error less than 1% | Soles of the feet | Shoe insoles | |
| Monitoring calf muscles in daily exercise [115] | 8 × 16 pressure sensing array | \ | Wrists | Smart sports bracelet | |
| Monitoring of human rehabilitation therapy | Remote access to the daily exercise status of rehab patients [6] | 9 YD122 inertial sensors | The joint mobility error is within 5°, and the system delay is within 0.5 s | Chest, left and right outer thighs, left and right outer calves, left and right outer upper arms, and left and right outer forearms | Soft Tape |
| Monitoring the progress of rehabilitation after TKR (total knee replacement) [35] | Two MPU6050 inertial measurement units (IMUs) | Accuracy of 96.16~98.09% at different DK speeds | Thighs and ankles | Velcro straps | |
| Tonic-clonic epilepsy detection [31] | An accelerometer | 7 out of 8 seizures detected | Wrist | Watches | |
| Recovery of daily activities during hospitalization after major surgery [130] | An accelerometer | \ | Ankle joint | Velcro straps on the outside of the socks | |
| Effect of gait training on walking ability in patients with gait disorders due to cerebral palsy [131] | One inertial sensor | \ | Eyeglass frames | Eyeglasses | |
| Daily activity monitoring of the elderly | Fall prediction for the elderly [65] | A tactile force sensor, three-axis accelerometer, and gyroscope combination | Accuracy rate up to 95% | Upper Trunk | \ |
| Continuous long-term activity monitoring for the elderly [46] | A triaxial accelerometer | Average recognition accuracy of 94.4% | Any pocket | Clothing | |
| Home care and fall monitoring for the elderly [30] | Three triaxial accelerometers | Average Accuracy of 96.54% | Lower back, wrists, and knees | \ | |
| Fall detection warning for the elderly [132] | Three joint angle sensors | 100% accuracy for fast running and squatting; 98.7% and 97.2% accuracy for front side and side falls | Knee, lower back | Smart clothing | |
| Daily activity monitoring of children | Ecological assessment of motor performance in infants aged 12–36 months [133] | Magnetic inertial platform with three sensors: two wired magnetic inertial sensors, one wireless Bluetooth magnetic motor inertial module | The technology platform will be implemented in the future | Wrist, toys | Small toys inside and soft straps |
| Quantifying daily leg movements for infants [134] | Two inertial sensors | Can measure 10 ms of no motion between two motions | Ankle joints | Fixed in stockings | |
| The number of times the infant sucks at meals [135] | A piezoelectric jaw motion sensor | Average error rate of −9.7% | Under the ear, behind the chin | Duct tape fixing | |
| Measuring the joint angle during the infant’s kicking [136] | Four joint-angle sensors | \ | On the hips and knees | \ | |
| Assessment of trunk posture and arm movements in infants [137] | Five IMUs (Inertial Measurement Units) | Error below 10% | Chest, forearms, upper arms | Undershirts and straps | |
| Characterize the dynamics of the infant’s limbs [138] | Four accelerometers | \ | Four limbs | \ | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Xue, Y.; Ren, S.; Wang, F. Sensor-Based Wearable Systems for Monitoring Human Motion and Posture: A Review. Sensors 2023, 23, 9047. https://doi.org/10.3390/s23229047
Huang X, Xue Y, Ren S, Wang F. Sensor-Based Wearable Systems for Monitoring Human Motion and Posture: A Review. Sensors. 2023; 23(22):9047. https://doi.org/10.3390/s23229047
Chicago/Turabian StyleHuang, Xinxin, Yunan Xue, Shuyun Ren, and Fei Wang. 2023. "Sensor-Based Wearable Systems for Monitoring Human Motion and Posture: A Review" Sensors 23, no. 22: 9047. https://doi.org/10.3390/s23229047
APA StyleHuang, X., Xue, Y., Ren, S., & Wang, F. (2023). Sensor-Based Wearable Systems for Monitoring Human Motion and Posture: A Review. Sensors, 23(22), 9047. https://doi.org/10.3390/s23229047