
Fast Antenna Array Calibration Using One External Receiver

Abstract
:1. Introduction
1.1. Contributions
- We estimate the mutual coupling of a transmit antenna array by developing a matrix-inversion-free algorithm. Most methods in the literature that estimate mutual coupling require an matrix inversion, which may not be practical for a large antenna array.
- The algorithm requires a single antenna element at the receiver. Our method requires only one receiver with a known location to capture the the transmitted signals (training sequence) from the transmit array.
- The algorithm utilizes a constant modulus training sequence; thus, it can work at the saturated region of the high-power amplifier. High-power amplifiers, used in most active radars, work at the saturated region of the amplifiers.
- Our simulation results show the effectiveness of the developed algorithm in terms of fast estimation and excellent performance, even for large array systems such as massive MISO.
- The compensation complexity in our method is , whereas in the previous methods, it is stated to be .
- 1:
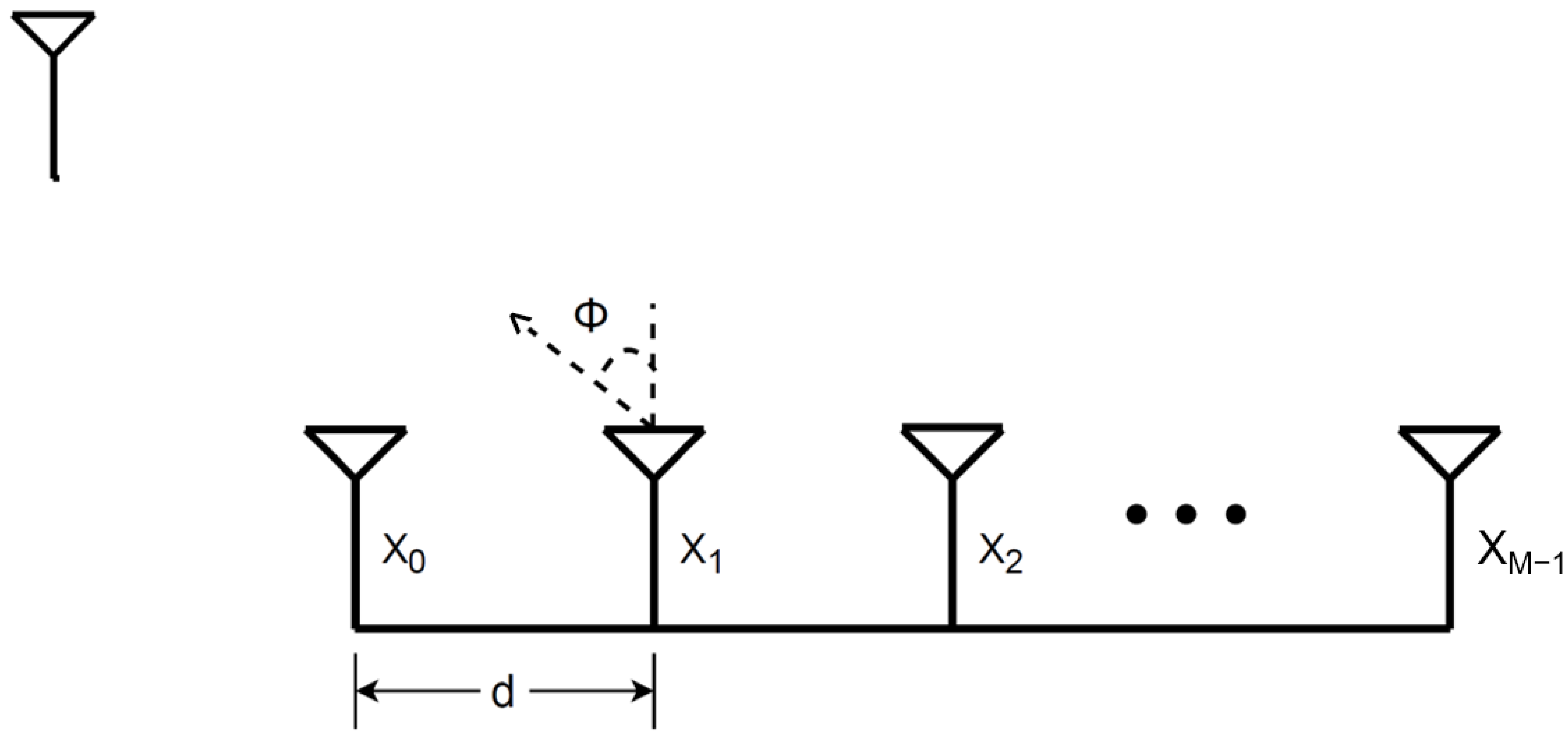
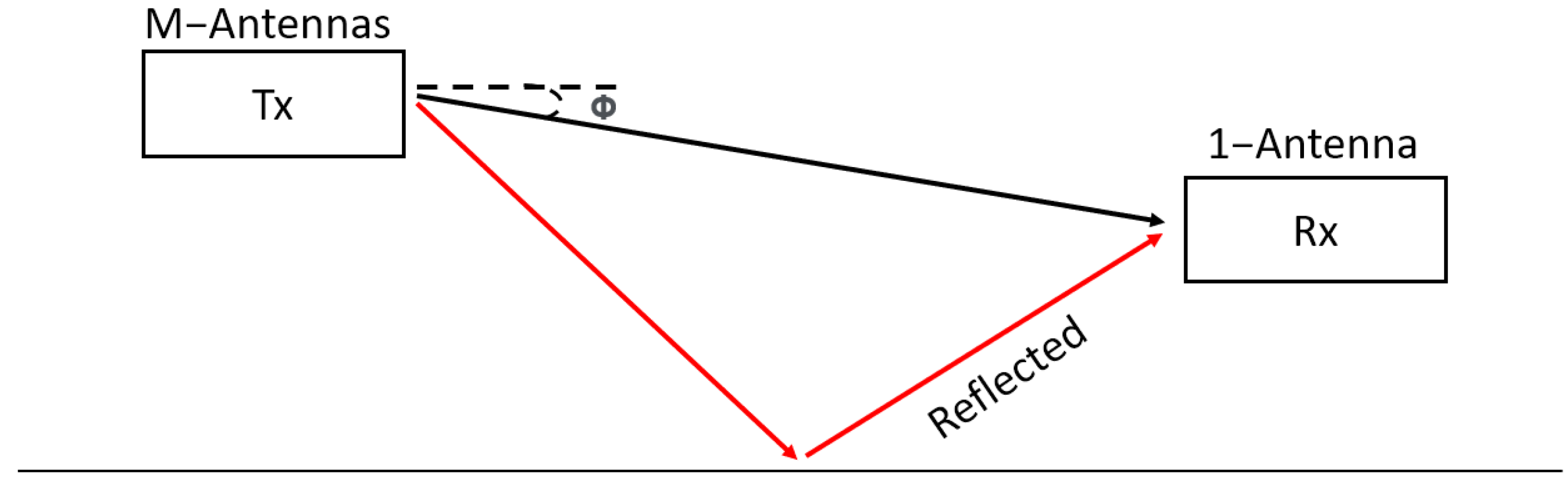
- In this paper, we focus on the mutual coupling on the transmitter side only. We assume that we have multiple antenna transmitters and only have a single antenna receiver.
- 2:
- The algorithm is also applicable to receiving antenna arrays. In this case, one or more single antenna transmitters are required. In this paper, we focus on the transmitter side only, since the transmit mutual coupling is much more challenging due to the CMC requirement described earlier [8].
- 3:
- This algorithm is useful for radar engineers and communication system designers.
1.2. Notations
2. Materials and Methods
| Algorithm 1: Mutual coupling algorithm |
|
3. Results
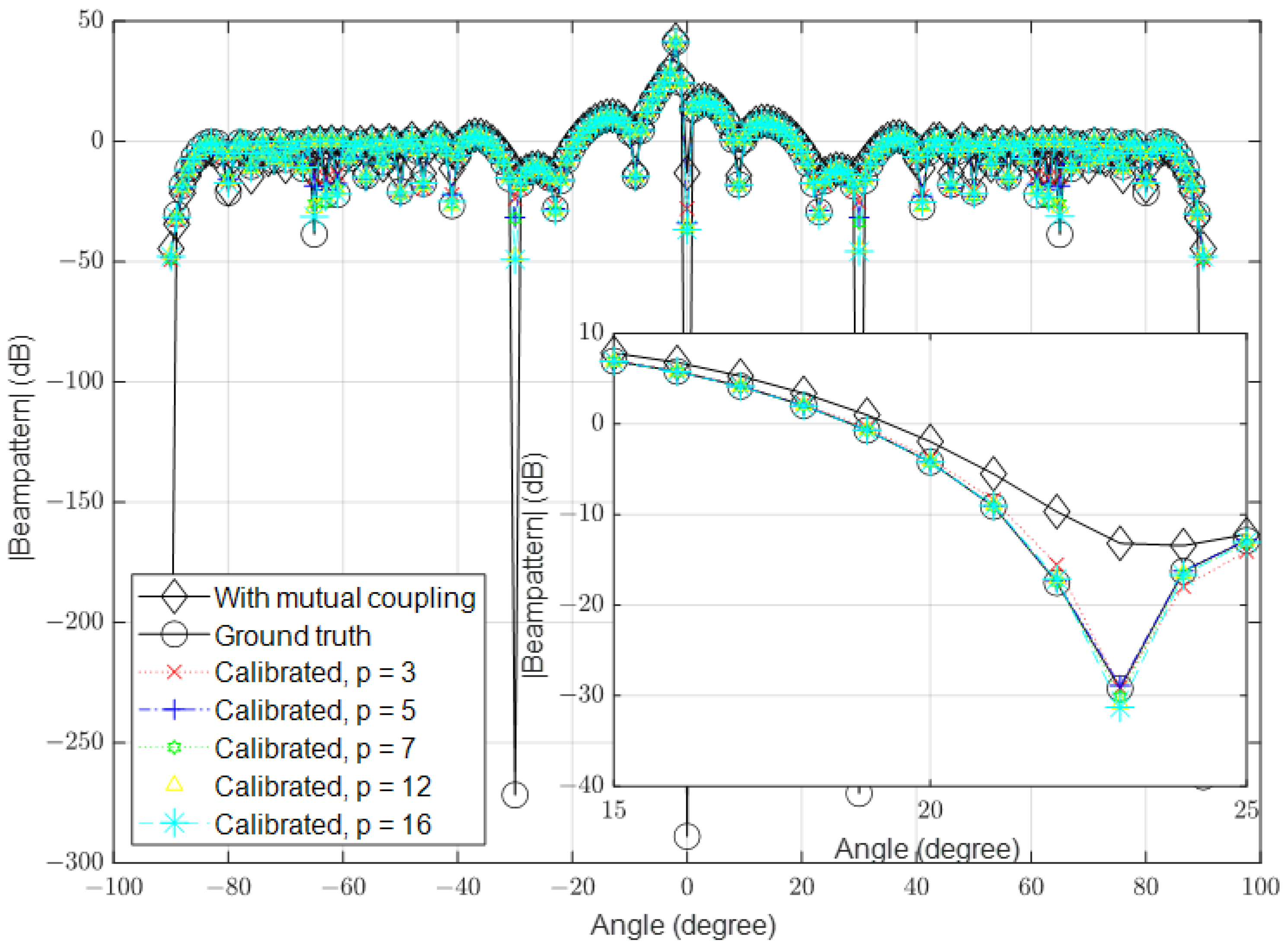
3.1. Low Signal-to-Noise Ratio (SNR)
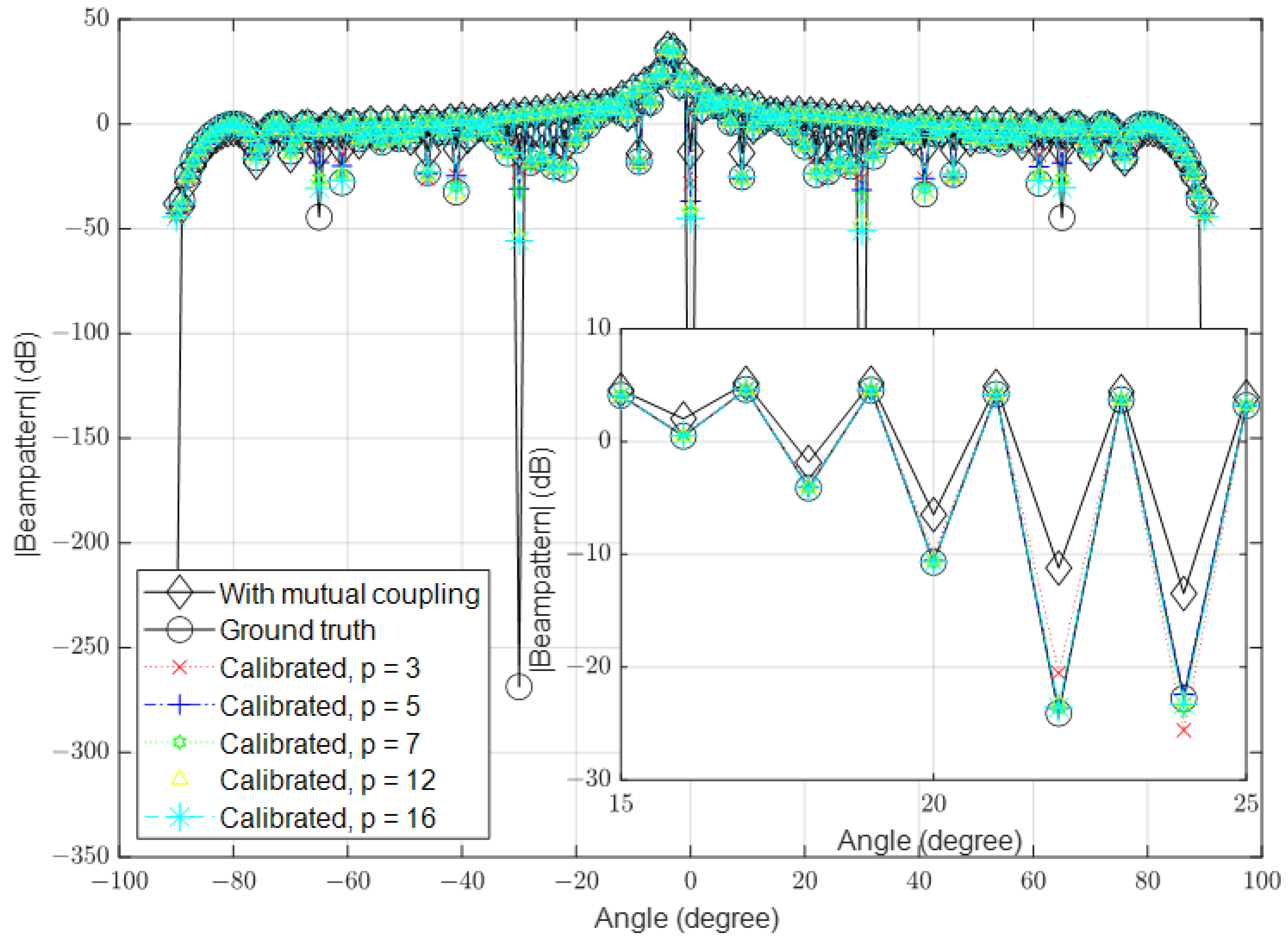
3.2. High Signal-to-Noise Ratio (SNR)
3.3. Multipath Environment Scenario
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MISO | Multi-input–single-output |
| MIMO | Multi-input–multi-output |
| CMC | constant modulus constraint |
| PAR | Peak-to-average ratio |
| MOM | Method of moments |
| RISR | Reiterative super-resolution |
| DFT | Discrete Fourier transform |
| FFT | Fast Fourier transform |
| IFFT | Inverse Fast Fourier transform |
| SNR | Signal-to-noise ratio |
| LOS | Line of sight |
| SINR | Signal-to-interference-noise ratio |
References
- Gross, F. Smart Antennas for Wireless Communications with MATLAB; McGraw Hills: New York, NY, USA, 2005. [Google Scholar]
- Widrow, B.; Stearns, S.D.; Burgess, J.C. Adaptive signal processing edited by bernard widrow and samuel d. stearns. J. Acoust. Soc. Am. 1986, 80, 991–992. [Google Scholar] [CrossRef]
- Biglieri, E.; Calderbank, R.; Constantinides, A.; Goldsmith, A.; Paulraj, A.; Poor, H.V. MIMO Wireless Communications; Cambridge University Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Willerton, M.; Manikas, A. Virtual linear array modelling of a planar array. In Proceedings of the 2nd IMA Conference on Mathematics in Defence, Swindon, UK, 20 October 2011. [Google Scholar]
- Manikas, A. Differential Geometry in Array Processing; Imperial College Press: London, UK, 2004. [Google Scholar]
- Xin, Y.; Yang, L.; Wang, D.; Zhang, R.; You, X. Bidirectional dynamic networks with massive MIMO: Performance analysis. IET Commun. 2017, 11, 468–476. [Google Scholar] [CrossRef]
- Medina-Sanchez, R.H. Beam Steering Control System for Low-Cost Phased Array Weather Radars: Design and Calibration Techniques. Doctoral Thesis, University of Massachusetts Amherst, Amherst, MA, USA, 2014. [Google Scholar]
- He, H.; Stoica, P.; Li, J. Wideband MIMO systems: Signal design for transmit beampattern synthesis. IEEE Trans. Signal Process. 2010, 59, 618–628. [Google Scholar] [CrossRef]
- Sharma, O.K.; Shankar, T.; Krishnatre, P. Reducing interference of Gaussian MIMO Z channel and Gaussian MIMO X Channel. In Proceedings of the IEEE International Conference on Engineering and Technology (ICETECH), Coimbatore, India, 17–18 March 2016; pp. 977–980. [Google Scholar]
- Larsson, E.G.; Edfors, O.; Tufvesson, F.; Marzetta, T.L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 2014, 52, 186–195. [Google Scholar] [CrossRef]
- Narukawa, N.; Fukushima, T.; Honda, K.; Ogawa, K. 64 × 64 MIMO antenna arranged in a daisy chain array structure at 50 Gbps capacity. In Proceedings of the 2019 URSI International Symposium on Electromagnetic Theory (EMTS), San Diego, CA, USA, 27–31 May 2019; pp. 1–4. [Google Scholar]
- Yamaguchi, S.; Nakamizo, H.; Shinjo, S.; Tsutsumi, K.; Fukasawa, T.; Miyashita, H. Development of active phased-array antenna for high SHF wideband massive MIMO in 5G. In Proceedings of the 2017 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, San Diego, CA, USA, 9–14 July 2017; pp. 1463–1464. [Google Scholar]
- Yuan, H.; Wang, C.; Li, Y.; Liu, N.; Cui, G. The design of array antennas used for Massive MIMO system in the fifth generation mobile communication. In Proceedings of the 2016 11th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Guilin, China, 18–21 October 2016; pp. 75–78. [Google Scholar]
- Won, S.H.; Chae, S.C.; Cho, S.Y.; Kim, I.; Bang, S.C. Massive MIMO test-bed design for next-generation long term evolution (LTE) mobile systems in the frequency division duplex (FDD) mode. In Proceedings of the 2014 International Conference on Information and Communication Technology Convergence (ICTC), Busan, Republic of Korea, 22–24 October 2014; pp. 841–844. [Google Scholar]
- Marzetta, T.L. Noncooperative cellular wireless with unlimited numbers of base station antennas. IEEE Trans. Wirel. Commun. 2010, 9, 3590–3600. [Google Scholar] [CrossRef]
- Lu, L.; Li, G.Y.; Swindlehurst, A.L.; Ashikhmin, A.; Zhang, R. An overview of massive MIMO: Benefits and challenges. IEEE J. Sel. Top. Signal Process. 2014, 8, 742–758. [Google Scholar] [CrossRef]
- Shen, S.; McKay, M.R.; Murch, R.D. MIMO systems with mutual coupling: How many antennas to pack into fixed-length arrays? In Proceedings of the 2010 International Symposium On Information Theory & Its Applications, Taichung, Taiwan, 17–20 October 2010; pp. 531–536. [Google Scholar]
- Thet, N.W.M.; Khan, S.; Arvas, E.; Özdemir, M.K. Impact of mutual coupling on power-domain non-orthogonal multiple access (NOMA). IEEE Access 2020, 8, 188401–188414. [Google Scholar] [CrossRef]
- Ludwig, A. Mutual coupling, gain and directivity of an array of two identical antennas. IEEE Trans. Antennas Propag. 1976, 24, 837–841. [Google Scholar] [CrossRef]
- Akindoyin, A. Modelling and estimation of carrier frequency and phase uncertainties in large aperture arrays. In Proceedings of the IEEE International Conference on Communications, London UK, 8–12 June 2015; pp. 4715–4720. [Google Scholar]
- Willerton, M. Array Auto-Calibration. Doctoral Thesis, Imperial College London, London, UK, 2013. [Google Scholar]
- Patton, L.; Rigling, B. Modulus constraints in adaptive radar waveform design. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Liao, W.-C.; Maaskant, R.; Emanuelsson, T.; Vilenskiy, A.; Ivashina, M. Antenna mutual coupling effects in highly integrated transmitter arrays. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–4. [Google Scholar]
- Vishvaksenan, K.S.; Mithra, K.; Kalaiarasan, R.; Raj, K.S. Mutual coupling reduction in microstrip patch antenna arrays using parallel coupled-line resonators. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2146–2149. [Google Scholar] [CrossRef]
- Qamar, Z.; Naeem, U.; Khan, S.A.; Chongcheawchamnan, M.; Shafique, M.F. Mutual coupling reduction for high-performance densely packed patch antenna arrays on finite substrate. IEEE Trans. Antennas Propag. 2016, 64, 1653–1660. [Google Scholar] [CrossRef]
- Cheng, Y.F.; Ding, X.; Shao, W.; Wang, B.Z. Reduction of mutual coupling between patch antennas using a polarization-conversion isolator. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 1257–1260. [Google Scholar] [CrossRef]
- Si, L.; Jiang, H.; Lv, X.; Ding, J. Broadband extremely close-spaced 5G MIMO antenna with mutual coupling reduction using metamaterial-inspired superstrate. Opt. Express 2019, 27, 3472–3482. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Bashir, S.; Ghafoor, S.; Rmili, H.; Mirza, J.; Ahmad, A. Isolation Enhancement in a Compact Four-Element MIMO Antenna for Ultra-Wideband Applications. Cmc-Comput. Mater. Contin. 2023, 75, 911–925. [Google Scholar]
- Alzahed, A.M.; Mikki, S.M.; Antar, Y.M. Nonlinear mutual coupling compensation operator design using a novel electromagnetic machine learning paradigm. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 861–865. [Google Scholar] [CrossRef]
- Vo, T.T.; Ouvry, L.; Sibille, A.; Bories, S. Mutual Coupling Modeling and Calibration in Antenna Arrays for AOA Estimation. In Proceedings of the 2018 2nd URSI Atlantic Radio Science Meeting (AT-RASC), Gran Canaria, Spain, 28 May–1 June 2018; pp. 1–4. [Google Scholar]
- Khan, S.; Sajjad, H.; Ozdemir, M.K.; Arvas, E. Mutual coupling compensation in receiving antenna arrays. In Proceedings of the 2020 International Applied Computational Electromagnetics Society Symposium (ACES), Virtual, 27–31 July 2020; pp. 1–2. [Google Scholar]
- Khan, S. Mutual Coupling Compensation in Arrays and its Implementation on Software Defined Radios. Ph.D. Thesis, Istanbul Medipol Universitesi Fen Bilimleri Enstitusu, Istanbul, Turkey, 2021. [Google Scholar]
- Huang, J.H.; Garry, J.L.; Smith, G.E.; Tan, D.K. In-field calibration of passive array receiver using detected target. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 0715–0720. [Google Scholar]
- Cordill, B.D.; Seguin, S.A.; Blunt, S.D. Mutual coupling calibration using the Reiterative Superresolution (RISR) algorithm. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 1278–1282. [Google Scholar]
- Daneshmand, S.; Broumandan, A.; Sokhandan, N.; Lachapelle, G. GNSS multipath mitigation with a moving antenna array. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 693–698. [Google Scholar] [CrossRef]
- Widrow, B.; Duvall, K.; Gooch, R.; Newman, W. Signal cancellation phenomena in adaptive antennas: Causes and cures. IEEE Trans. Antennas Propag. 1982, 30, 469–478. [Google Scholar] [CrossRef]
- Khan, L.U.; Yaqoob, I.; Imran, M.; Han, Z.; Hong, C.S. 6G wireless systems: A vision, architectural elements and future directions. IEEE Access 2020, 8, 147029–147044. [Google Scholar] [CrossRef]
- Eltayeb, M.E.; Al-Naffouri, T.Y.; Heath, R.W. Compressive sensing for blockage detection in vehicular millimeter wave antenna arrays. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Kim, J.H.; Cho, S.I.; Kim, H.J.; Choi, J.W.; Jang, J.E.; Choi, J.P. Mutual coupling in RF powered wireless communication networks for health monitoring. In Proceedings of the IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Nanjing, China, 16–18 May 2016; pp. 1–3. [Google Scholar]
- Balanis, C.A. Antenna theory: A review. Proc. IEEE 1992, 80, 7–23. [Google Scholar] [CrossRef]
- Svantesson, T. Modeling and estimation of mutual coupling in a uniform linear array of dipoles. In Proceedings of the 1999 IEEE International Conference on Acoustics, Speech and Signal Processing. Proceedings. ICASSP99 (Cat. No. 99CH36258), Phoenix, AZ, USA, 15–19 March 1999; pp. 2961–2964. [Google Scholar]
- Malanowski, M.; Kulpa, K. Digital beamforming for passive coherent location radar. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Steyskal, H.; Herd, J.S. Mutual coupling compensation in small array antennas. IEEE Trans. Antennas Propag. 1990, 38, 1971–1975. [Google Scholar] [CrossRef]
- Durrani, S.; Bialkowski, M.E. Effect of mutual coupling on the interference rejection capabilities of linear and circular arrays in CDMA systems. IEEE Trans. Antennas Propag. 2004, 52, 1130–1134. [Google Scholar] [CrossRef]
- Cooley, J.W.; Lewis, P.A.; Welch, P.D. Historical notes on the fast Fourier transform. Proc. IEEE 1967, 55, 1675–1677. [Google Scholar] [CrossRef]
- Mitra, S.K.; Kuo, Y. Digital Signal Processing: A Computer-Based Approach; McGraw-Hill: New York, NY, USA, 2006; Volume 2. [Google Scholar]
- Rao, K.R.; Yip, P.C. The Transform and Data Compression Handbook; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Williams, G. Overdetermined systems of linear equations. Am. Math. Mon. 1990, 97, 511–513. [Google Scholar] [CrossRef]
- Deng, J.; Wang, Q.; Xie, J. Fourth-order cumulant based direction finding algorithm for non-circular signals using uniform circular array with mutual coupling. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Macau, China, 21–24 August 2020; pp. 1–5. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| f | 3 GHz |
| 10 cm | |
| d | |
| Number of antennas (M) | 16, 64, 128 |
| p | 3, 5, 7, 12, 16 |
| Direction of source | −5° |
| Method | Compensation Complexity | Number of Receivers or Transmitters | Receiver or Transmitter Side |
|---|---|---|---|
| Method in [30] | 1 | Transmitter or receiver | |
| Method in [31] | 1 | Receiver | |
| Method in [33] | 1 (records a lot of data) | Receiver | |
| Proposed method | + | 1 | Transmitter (can be extended to receiver) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bazuhair, B.; Aldayel, O. Fast Antenna Array Calibration Using One External Receiver. Sensors 2023, 23, 9026. https://doi.org/10.3390/s23229026
Bazuhair B, Aldayel O. Fast Antenna Array Calibration Using One External Receiver. Sensors. 2023; 23(22):9026. https://doi.org/10.3390/s23229026
Chicago/Turabian StyleBazuhair, Basem, and Omar Aldayel. 2023. "Fast Antenna Array Calibration Using One External Receiver" Sensors 23, no. 22: 9026. https://doi.org/10.3390/s23229026
APA StyleBazuhair, B., & Aldayel, O. (2023). Fast Antenna Array Calibration Using One External Receiver. Sensors, 23(22), 9026. https://doi.org/10.3390/s23229026