
A Real-Time Vessel Detection and Tracking System Based on LiDAR

Abstract
:1. Introduction
2. Related Work
2.1. Point Cloud Cluster Methods
2.2. Vessel Tracking
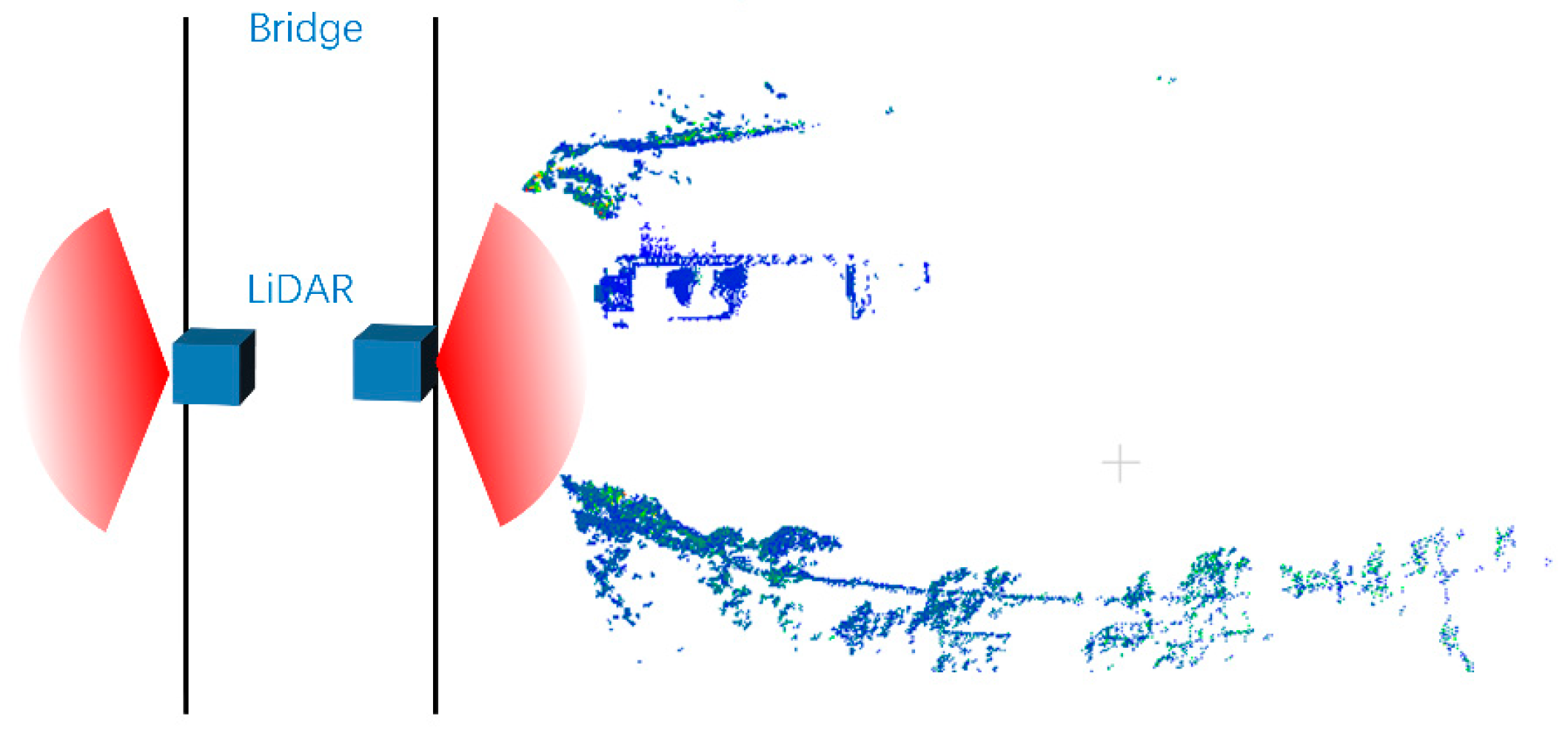
3. Real-Time Canal Monitoring System
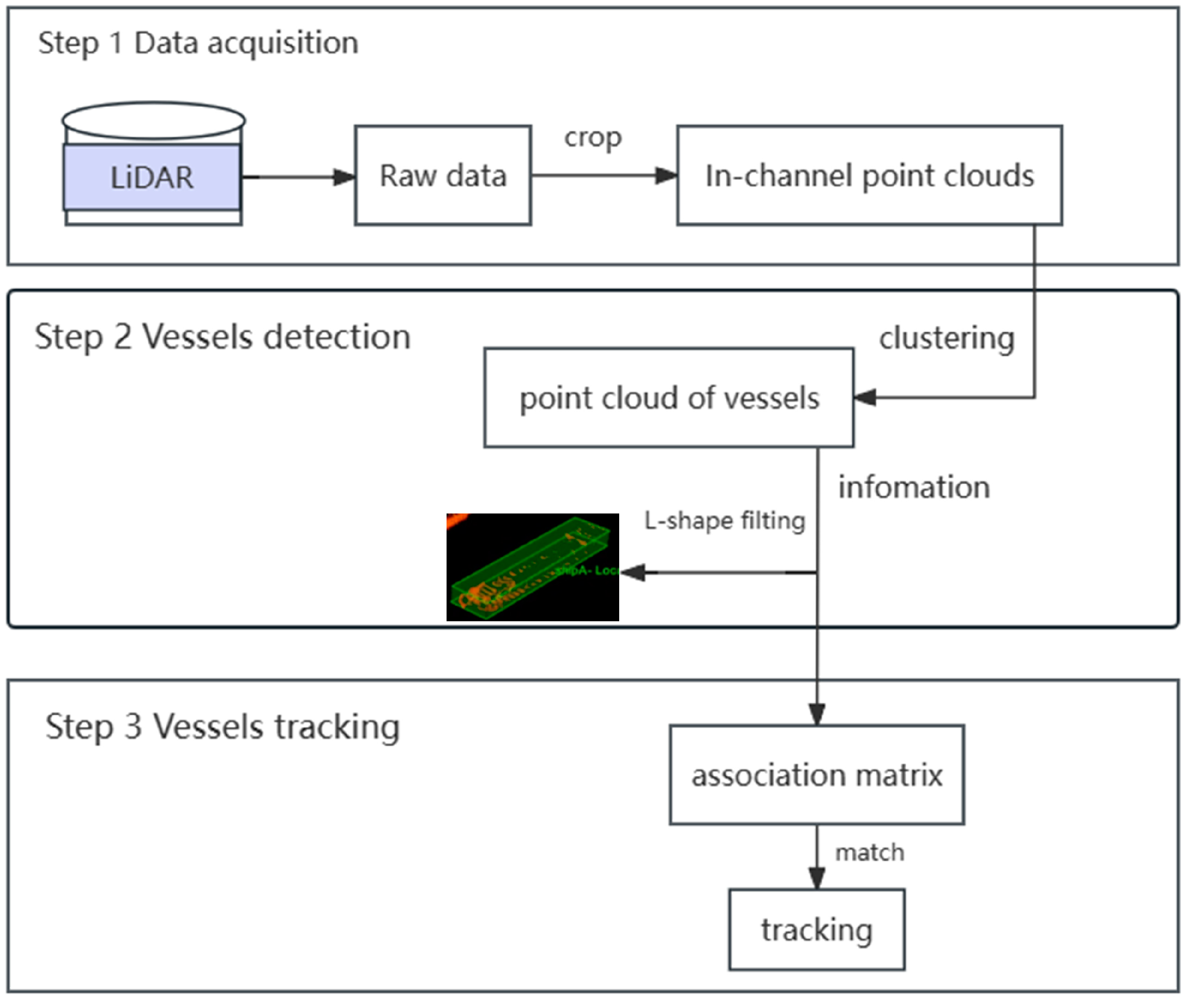
3.1. Overview of the Proposed System
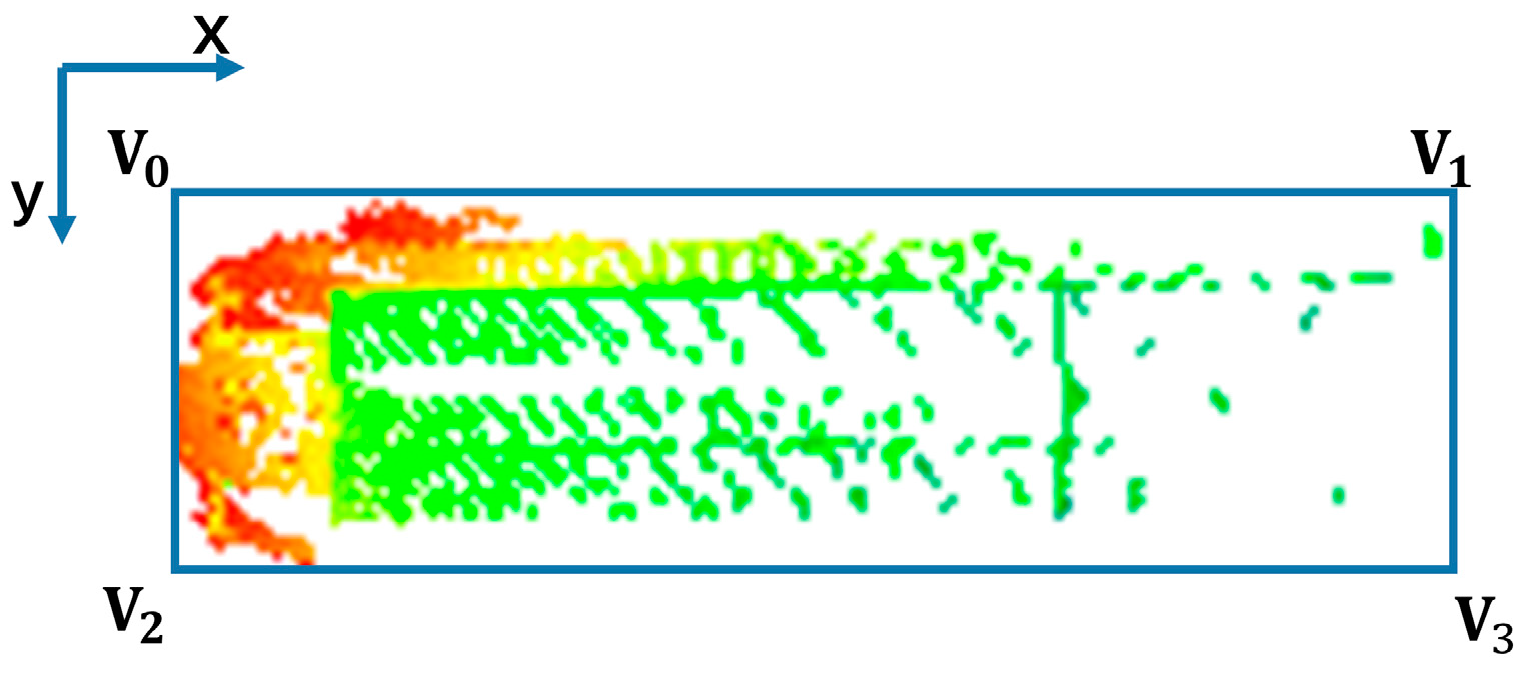
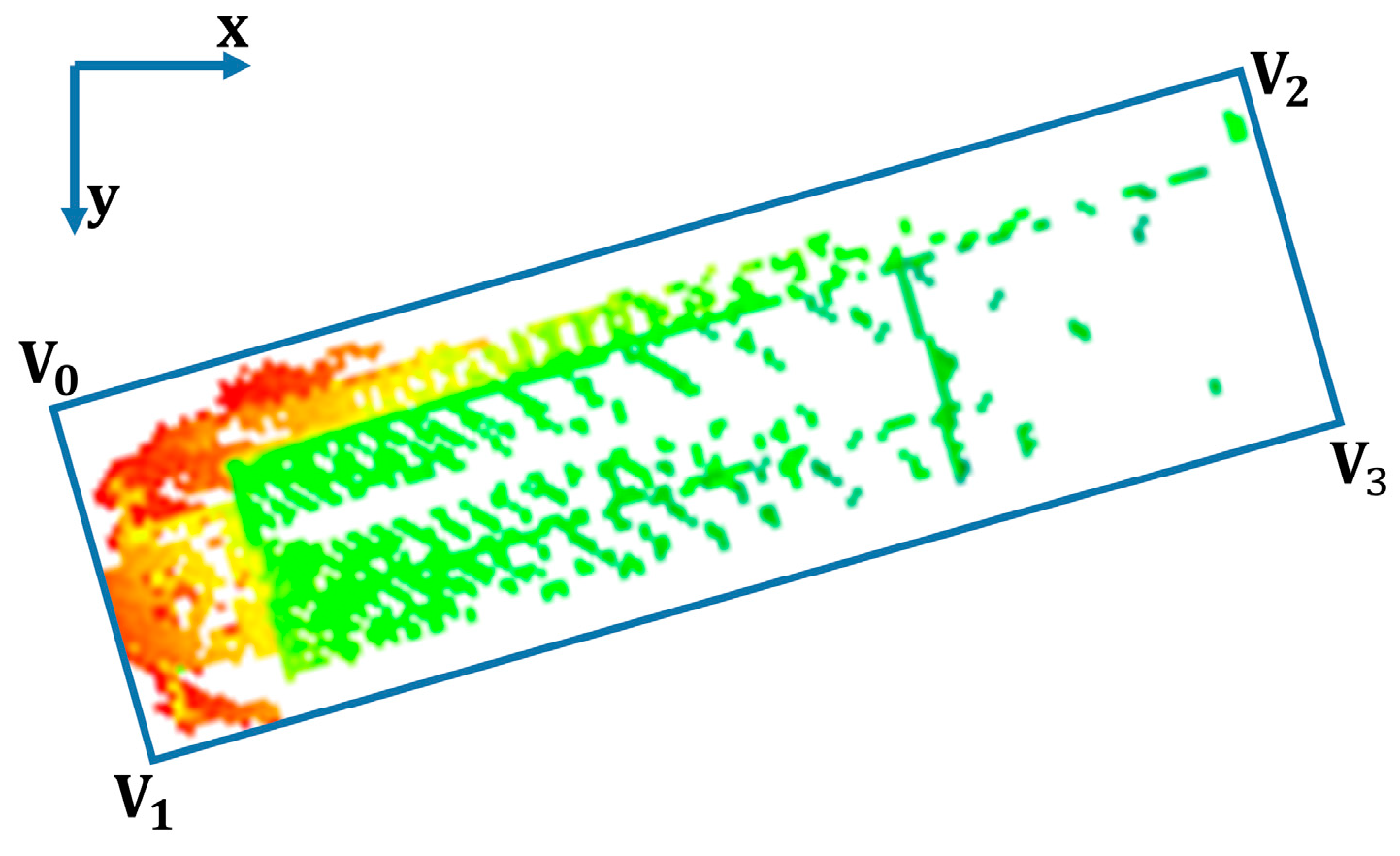
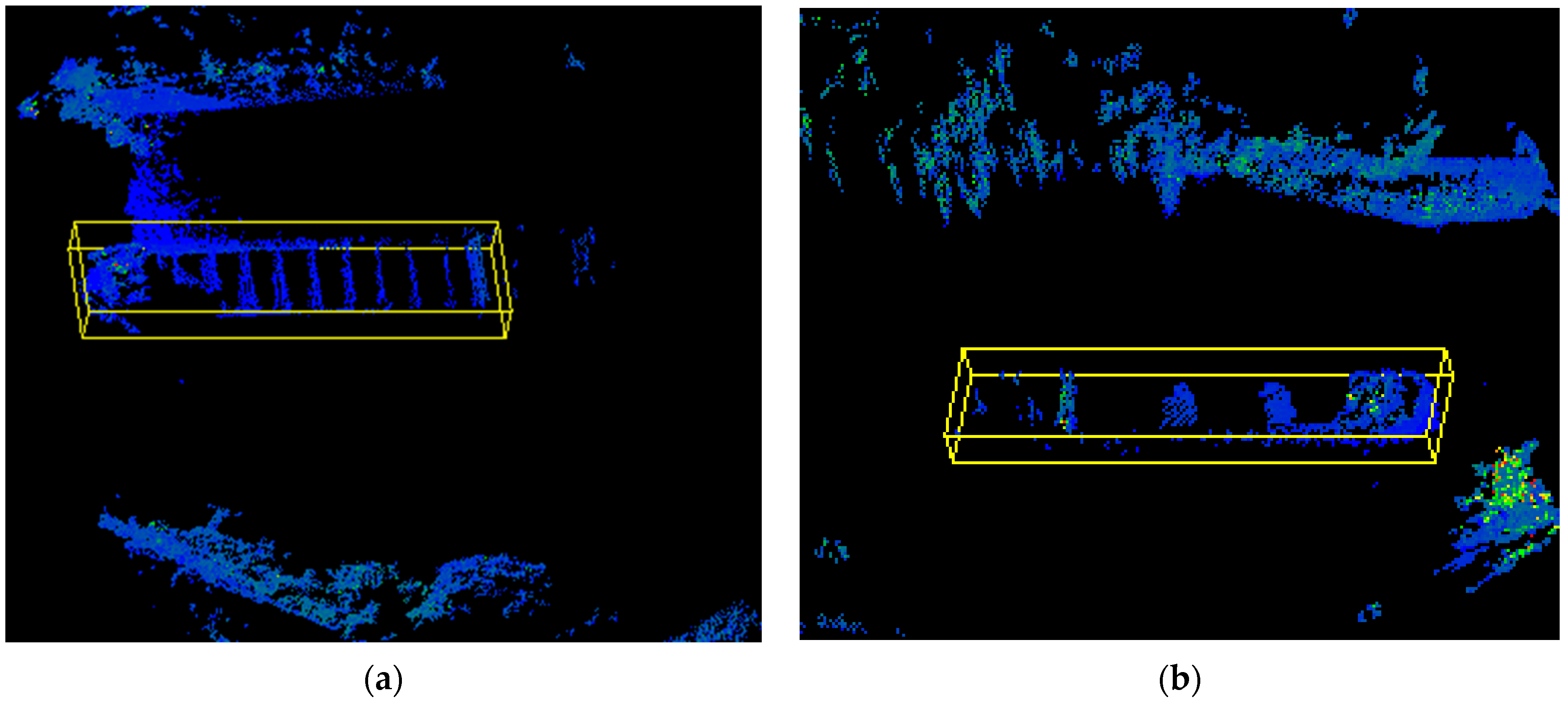
3.2. Vessel Clustering and Fitting
| Algorithm 1: Optimized Euclidean clustering |
| Input: Point Cloud P, Radius Threshold Rth, Scaling factor α output: a list of an index for each point C create a kd-tree to present P |
 |
| Algorithm 2: Search-Based Rectangle Fitting |
| Input: |
| Output: |
| rectangle edge direction vector |
| projection onto the edge |
| insert into with key() |
| from with maximum value |
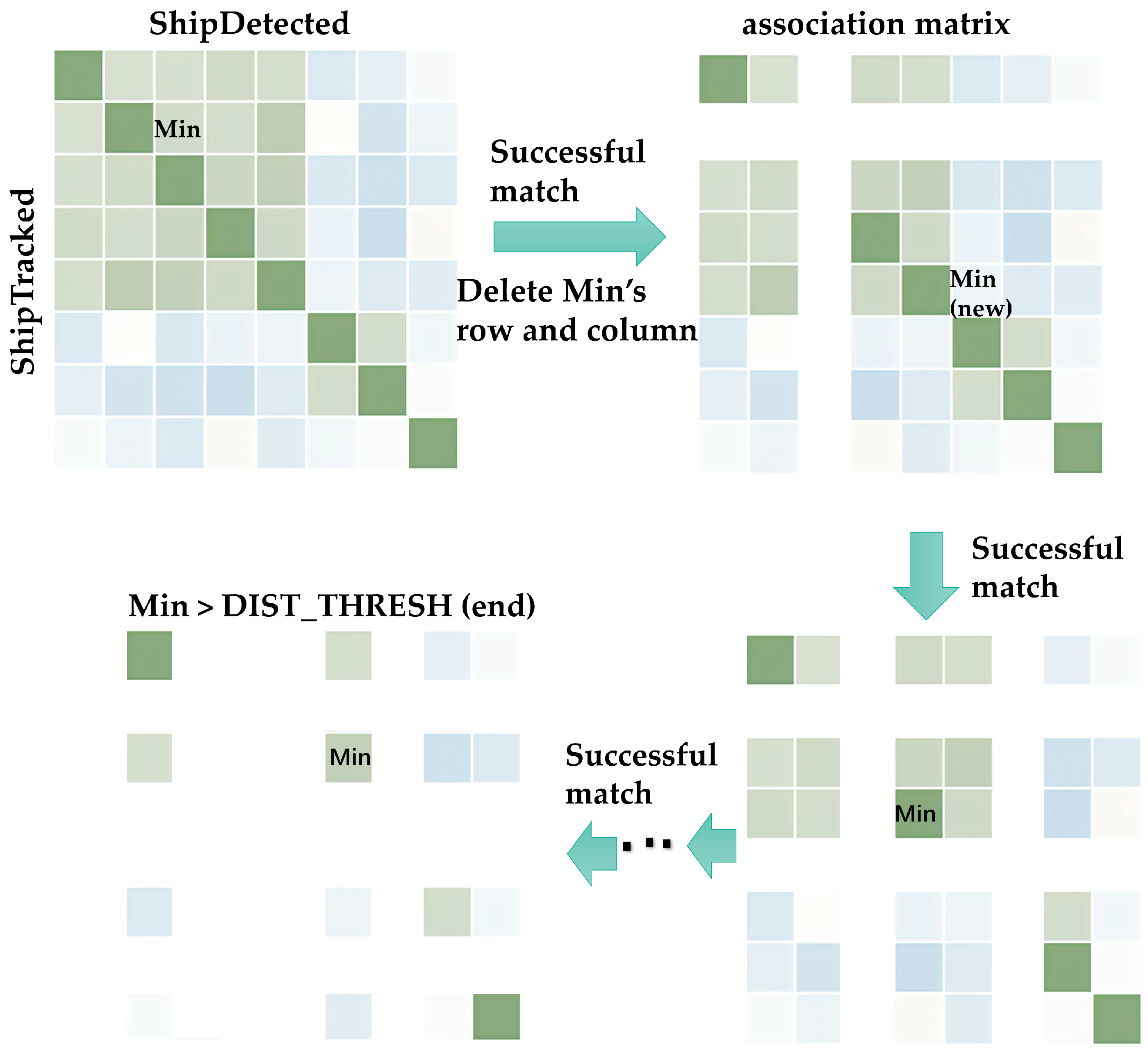
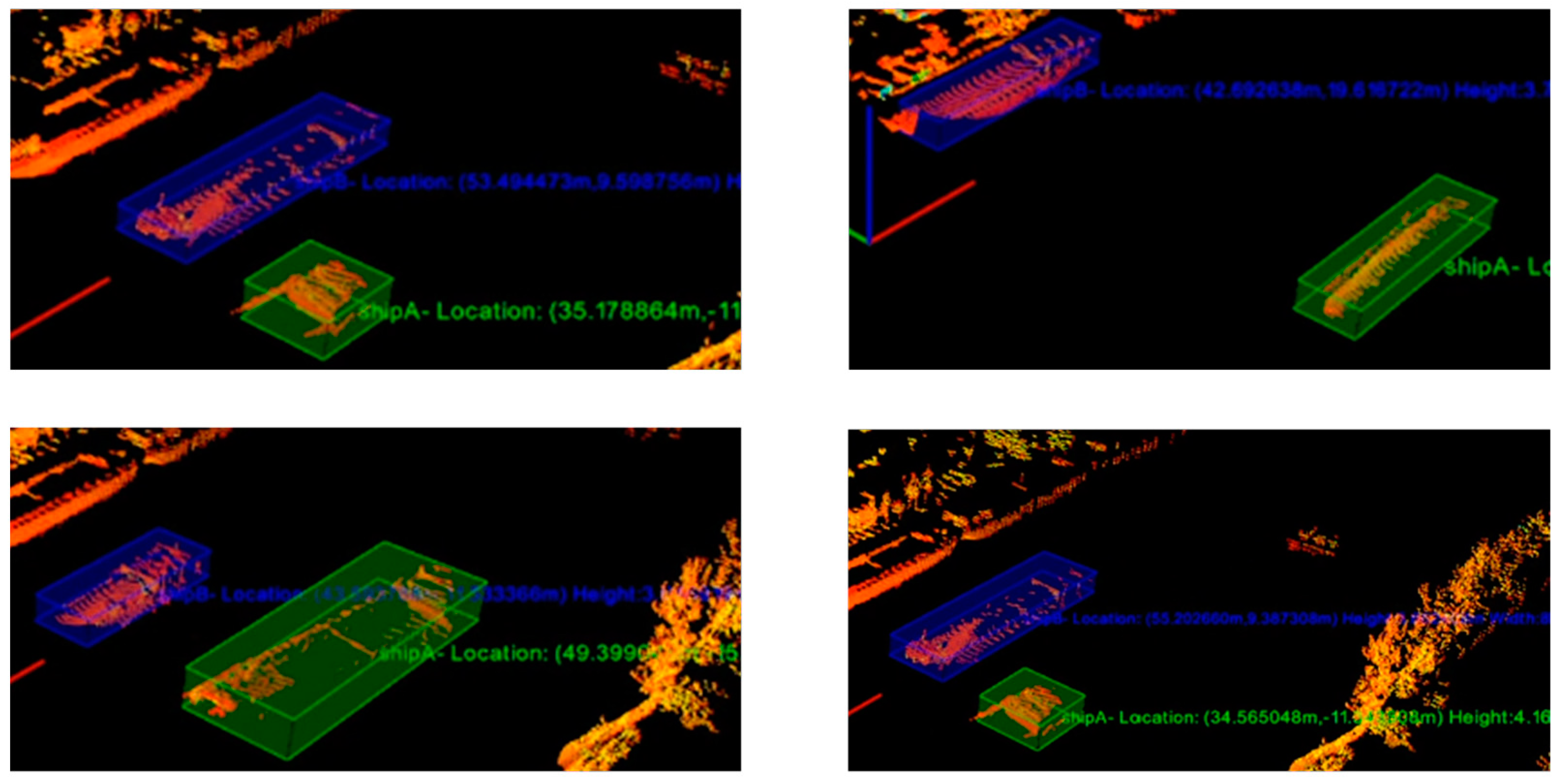
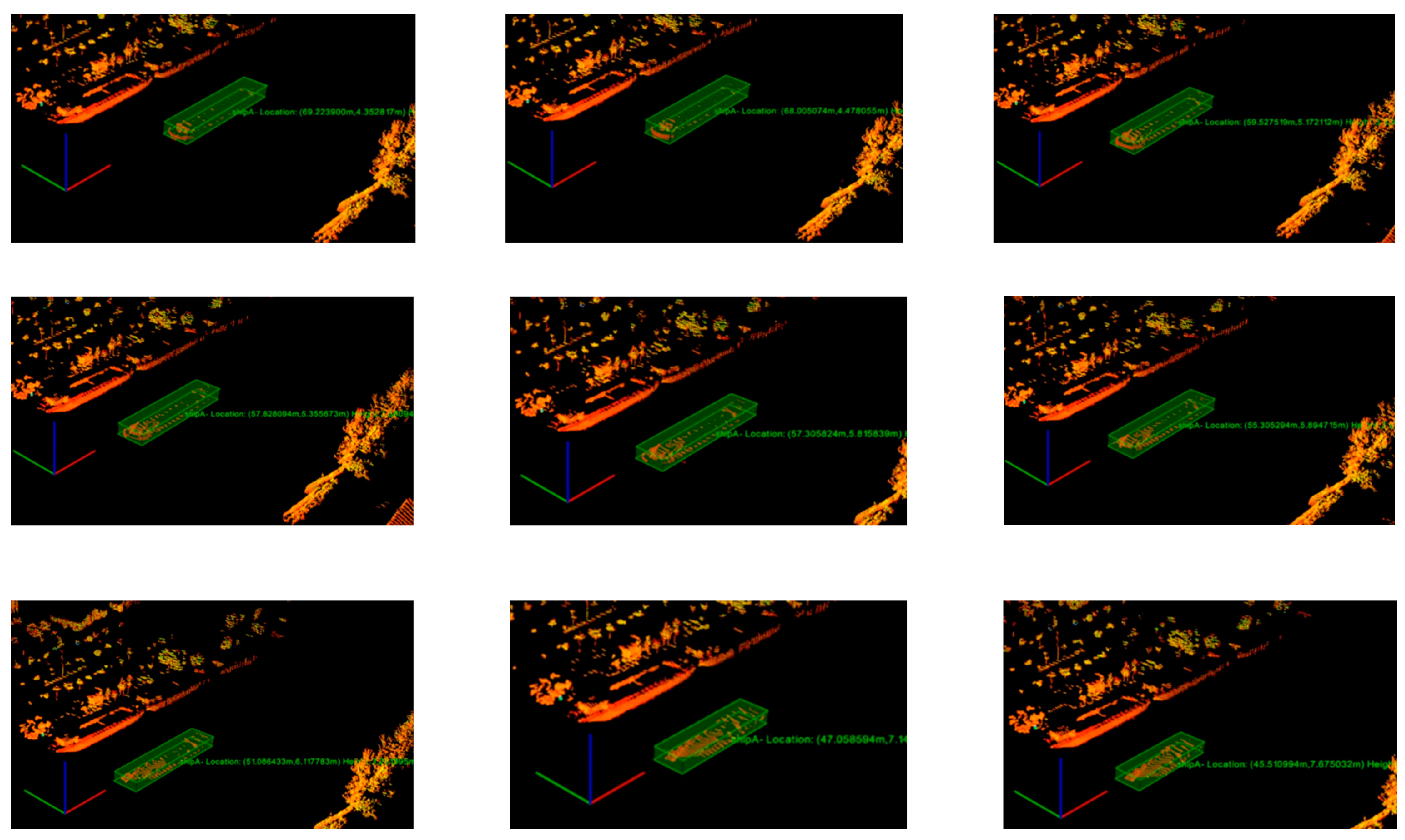
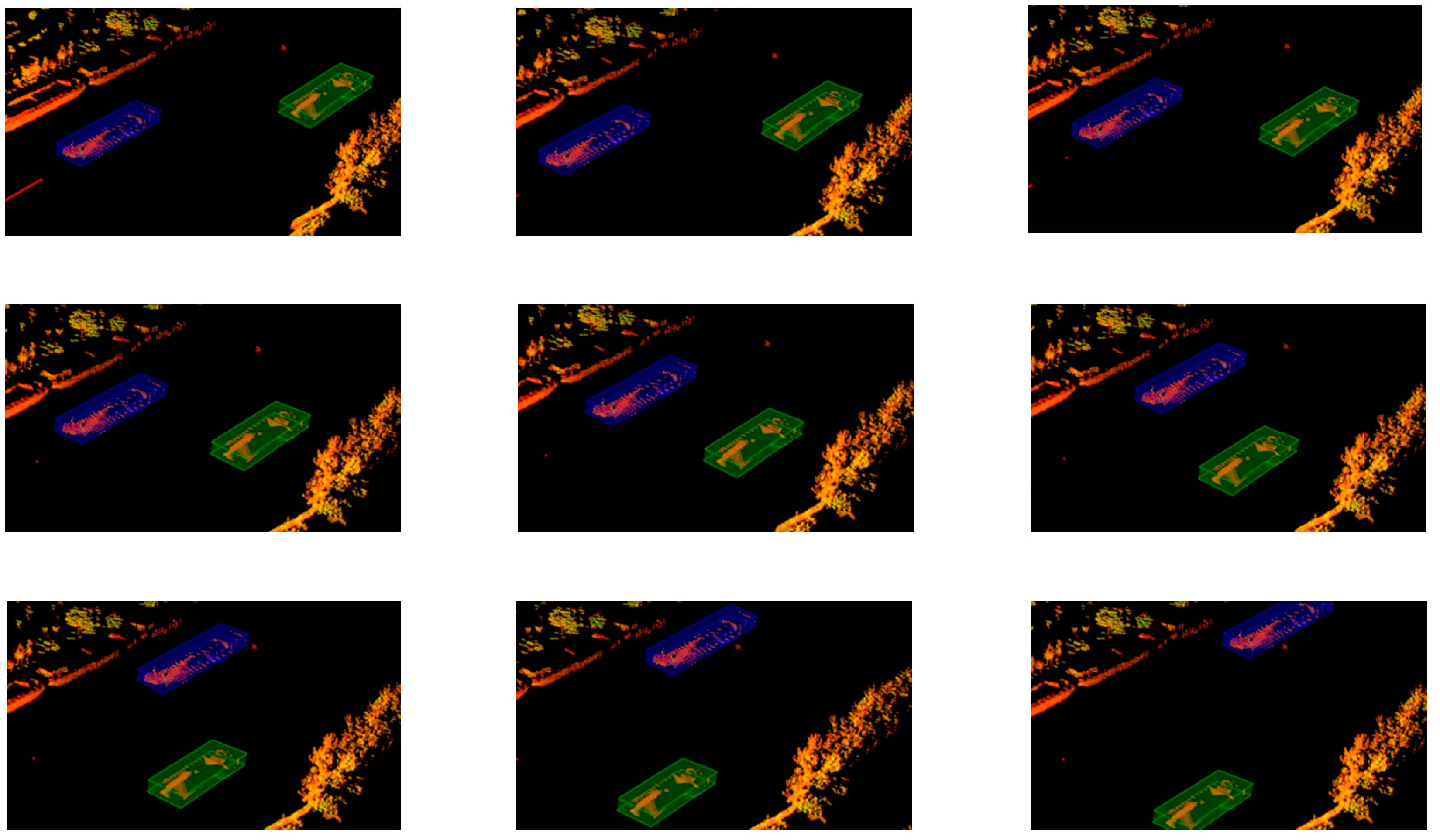
3.3. Vessel Tracking
4. Experimental Result
4.1. Data Set Acquisition
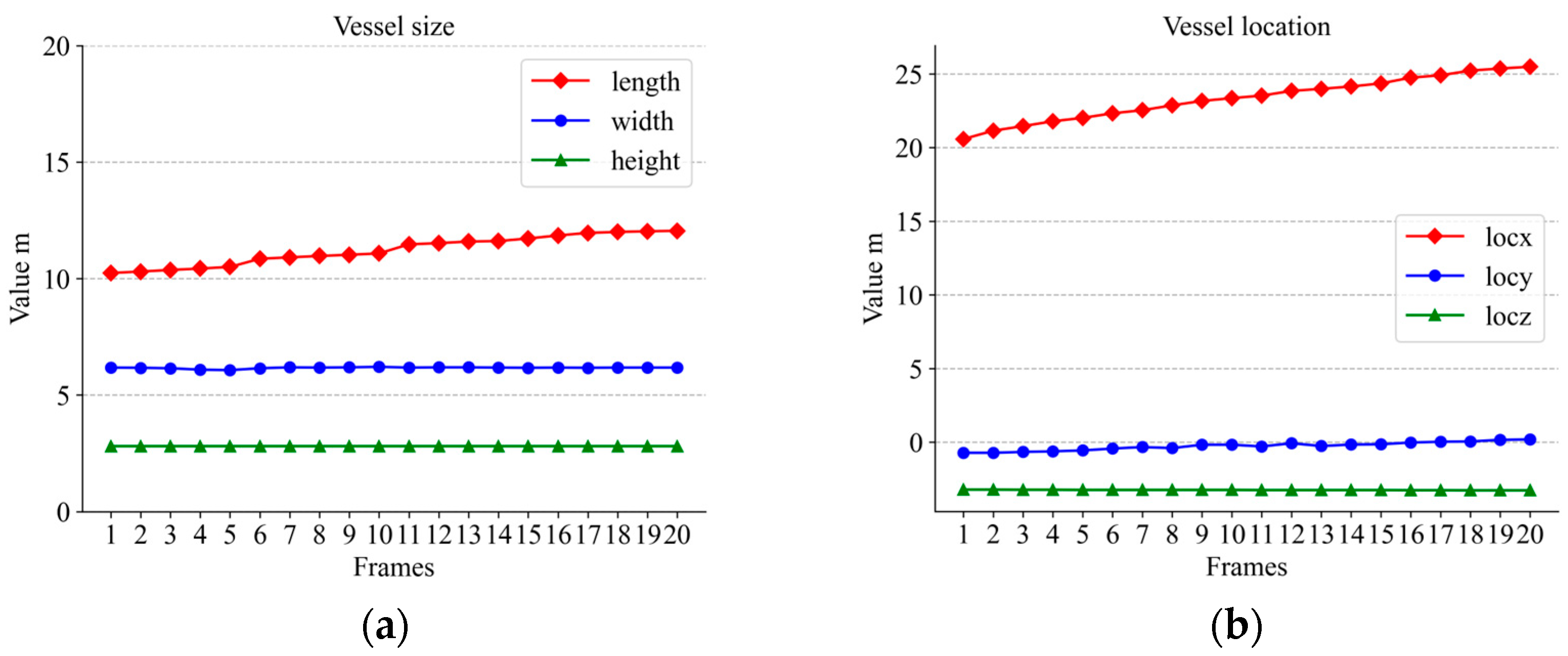
4.2. Vessel Detection
4.3. Vessel Tracking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, G.; Deng, X.; Zhou, M.; Zhu, Q.; Lan, J.; Xia, H.; Mitrouchev, P. Research on Data Monitoring System for Intelligent Vessel. In Proceedings of the Advanced Manufacturing and Automation IX 9th; Springer: Berlin/Heidelberg, Germany, 2020; pp. 234–241. [Google Scholar]
- Urska, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar]
- Zhang, Z.; Guo, Y.; Chen, G.; Xu, Z. Wildfire Detection via a Dual-Channel CNN with Multi-Level Feature Fusion. Forests 2023, 14, 1499. [Google Scholar] [CrossRef]
- Zhang, L.-L.; Jiang, Y.; Sun, Y.-P.; Zhang, Y.; Wang, Z. Improvements based on ShuffleNetV2 model for bird identification. IEEE Access 2023, 11, 101823–101832. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Chen, A.; Zhang, K.; Zhang, R.; Wang, Z.; Lu, Y.; Guo, Y.; Zhang, S. Pimae: Point cloud and image interactive masked autoencoders for 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Yin, T.; Zhou, X.; Krahenbuhl, P. Center-based 3d object detection and tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 11784–11793. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar]
- Ali, W.; Abdelkarim, S.; Zidan, M.; Zahran, M.; El Sallab, A. Yolo3d: End-to-end real-time 3d oriented object bounding box detection from lidar point cloud. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Farahnakian, F.; Heikkonen, J. Deep learning based multi-modal fusion architectures for maritime vessel detection. Remote. Sens. 2020, 12, 2509. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Shi, C.; Wu, H.; Zhao, J.; Fu, J. Robust vessel tracking via multi-view learning and sparse representation. J. Navig. 2019, 72, 176–192. [Google Scholar] [CrossRef]
- Wang, Y.; Ning, X.; Leng, B.; Fu, H. Vessel detection based on deep learning. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 275–279. [Google Scholar]
- Chen, Z.; Chen, D.; Zhang, Y.; Cheng, X.; Zhang, M.; Wu, C.J. Deep learning for autonomous vessel-oriented small vessel detection. Saf. Sci. 2020, 130, 104812. [Google Scholar] [CrossRef]
- Ramachandra, K. Kalman Filtering Techniques for Radar Tracking; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Yao, Z.; Chen, X.; Xu, N.; Gao, N.; Ge, M. LiDAR-based simultaneous multi-object tracking and static mapping in nearshore scenario. Ocean. Eng. 2023, 272, 113939. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, W.; Dong, C.; Dolan, J.M. Efficient L-shape fitting for vehicle detection using laser scanners. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 54–59. [Google Scholar]
- Yang, Q.; Chen, H.; Ma, Z.; Xu, Y.; Tang, R.; Sun, J. Predicting the perceptual quality of point cloud: A 3d-to-2d projection-based exploration. IEEE Trans. Multimedia 2020, 23, 3877–3891. [Google Scholar] [CrossRef]
- Klasing, K.; Wollherr, D.; Buss, M. A clustering method for efficient segmentation of 3D laser data. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 4043–4048. [Google Scholar]
- Cao, Y.; Wang, Y.; Xue, Y.; Zhang, H.; Lao, Y. FEC: Fast Euclidean Clustering for Point Cloud Segmentation. Drones 2022, 6, 325. [Google Scholar] [CrossRef]
- Wen, L.; He, L.; Gao, Z.J.I.A. Research on 3D point cloud de-distortion algorithm and its application on Euclidean clustering. IEEE Access 2019, 7, 86041–86053. [Google Scholar] [CrossRef]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-time superpixel segmentation by DBSCAN clustering algorithm. IEEE Trans. Image Process. 2016, 25, 5933–5942. [Google Scholar] [CrossRef] [PubMed]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the KDD’96: Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2 August 1996; pp. 226–231. [Google Scholar]
- Boonchoo, T.; Ao, X.; Liu, Y.; Zhao, W.; Zhuang, F.; He, Q. Grid-based DBSCAN: Indexing and inference. Pattern Recognit. 2019, 90, 271–284. [Google Scholar]
- Li, M.; Bi, X.; Wang, L.; Han, X. A method of two-stage clustering learning based on improved DBSCAN and density peak algorithm. Comput. Commun. 2021, 167, 75–84. [Google Scholar]
- Xie, Z.; Liang, P.; Tao, J.; Zeng, L.; Zhao, Z.; Cheng, X.; Zhang, J.; Zhang, C. An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots. Electronics 2022, 11, 1612. [Google Scholar] [CrossRef]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Sun, P.; Cao, J.; Jiang, Y.; Zhang, R.; Xie, E.; Yuan, Z.; Wang, C.; Luo, P. Transtrack: Multiple object tracking with transformer. arXiv 2020, arXiv:2012.15460. [Google Scholar]
- Sinaga, K.P.; Yang, M.-S. Unsupervised K-means clustering algorithm. IEEE Access 2020, 8, 80716–80727. [Google Scholar]
- Liu, H.; Song, R.; Zhang, X.; Liu, H. Technology, Point cloud segmentation based on Euclidean clustering and multi-plane extraction in rugged field. Meas. Sci. Technol. 2021, 32, 095106. [Google Scholar] [CrossRef]
- Jiang, D.; Wang, Y.; Hu, J.; Qian, H.; Zhu, R. Automatic modal identification based on similarity filtering and fuzzy clustering. J. Vib. Control. 2023. [Google Scholar] [CrossRef]
- Jin, Y.; Yuan, X.; Wang, Z.; Zhai, B. Filtering Processing of LIDAR Point Cloud Data. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, England, 2021; p. 12125. [Google Scholar]
- Ruud, K.A.; Brekke, E.F.; Eidsvik, J. LIDAR extended object tracking of a maritime vessel using an ellipsoidal contour model. In Proceedings of the 2018 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 9–11 October 2018; pp. 1–6. [Google Scholar]
- Liu, Y.; Yao, L.; Xiong, W.; Zhou, Z.J.I.G.; Letters, R.S. GF-4 satellite and automatic identification system data fusion for vessel tracking. IEEE Geosci. Remote Sens. Lett. 2018, 16, 281–285. [Google Scholar]
- Assaf, M.H.; Petriu, E.M.; Groza, V. Vessel track estimation using GPS data and Kalman Filter. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–6. [Google Scholar]
- Shuping, F.; Yu, R.; Chenming, H.; Fengbo, Y.J.E.J.O.A. Planning of takeoff/landing site location, dispatch route, and spraying route for a pesticide application helicopter. Eur. J. Agron 2023, 146, 126814. [Google Scholar]
- Li, Q.; Xue, Y. Real-time detection of street tree crowns using mobile laser scanning based on pointwise classification. Biosyst. Eng. 2023, 231, 20–35. [Google Scholar] [CrossRef]
- Sanchez-Matilla, R.; Poiesi, F.; Cavallaro, A. Online multi-target tracking with strong and weak detections. In Proceedings of the Computer Vision–ECCV 2016 Workshops, Amsterdam, The Netherlands, 8–16 and 15–16 October, 2016, Proceedings, Part II 14; Springer: Berlin/Heidelberg, Germany, 2016; pp. 84–99. [Google Scholar]
- Li, Y.; Huang, C.; Nevatia, R. Learning to associate: Hybridboosted multi-target tracker for crowded scene. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2953–2960. [Google Scholar]
- Luiten, J.; Osep, A.; Dendorfer, P.; Torr, P.; Geiger, A.; Leal-Taixé, L.; Leibe, B. Hota: A higher order metric for evaluating multi-object tracking. Int. J. Comput. Vis. 2021, 129, 548–578. [Google Scholar] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Speed of Single Frame |
|---|---|
| K-means Cluster | 25.4 ms |
| DBSCAN Cluster | 17.8 ms |
| Euclidean Cluster | 16.2 ms |
| Super-voxel Cluster | 62.6 ms |
| Method | Number of Correct Identifications | False Positive | False Negative | Accuracy% |
|---|---|---|---|---|
| PointNet | 493 | 3 | 24 | 81.5% |
| YOLO3D | 502 | 4 | 41 | 80.6% |
| PointRCNN | 511 | 2 | 17 | 85.6% |
| Ours | 523 | 2 | 9 | 88.9% |
| Method | MOTA% | MOTP% | IDsw | FP | FN |
|---|---|---|---|---|---|
| EMATT | 53.2 | 77.5 | 5 | 13 | 261 |
| SORT | 59.5 | 79.2 | 6 | 26 | 150 |
| DeepSORT | 61.9 | 78.9 | 3 | 29 | 146 |
| Ours | 63.3 | 79.1 | 1 | 18 | 141 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, L.; Huang, L.; Zhang, Y.; Chen, Y.; Wang, J.; Zhang, X. A Real-Time Vessel Detection and Tracking System Based on LiDAR. Sensors 2023, 23, 9027. https://doi.org/10.3390/s23229027
Qi L, Huang L, Zhang Y, Chen Y, Wang J, Zhang X. A Real-Time Vessel Detection and Tracking System Based on LiDAR. Sensors. 2023; 23(22):9027. https://doi.org/10.3390/s23229027
Chicago/Turabian StyleQi, Liangjian, Lei Huang, Yi Zhang, Yue Chen, Jianhua Wang, and Xiaoqian Zhang. 2023. "A Real-Time Vessel Detection and Tracking System Based on LiDAR" Sensors 23, no. 22: 9027. https://doi.org/10.3390/s23229027
APA StyleQi, L., Huang, L., Zhang, Y., Chen, Y., Wang, J., & Zhang, X. (2023). A Real-Time Vessel Detection and Tracking System Based on LiDAR. Sensors, 23(22), 9027. https://doi.org/10.3390/s23229027