



Bidirectional Six-Pack SiC Boost–Buck Converter Using Droop Control in DC Nano-Grid


Abstract
:1. Introduction
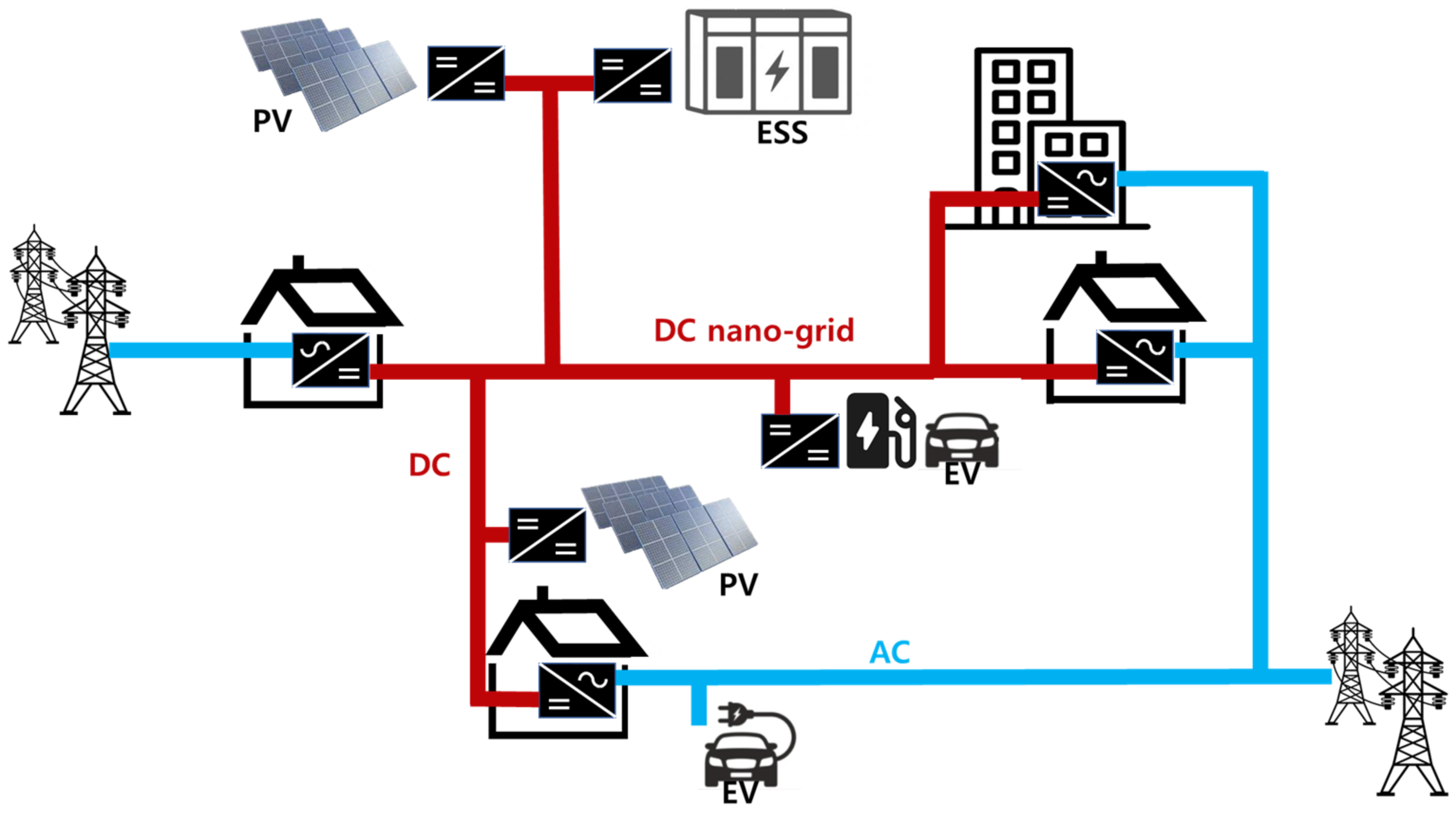
2. DC Nano-Grid System
3. Proposed Bidirectional Converter
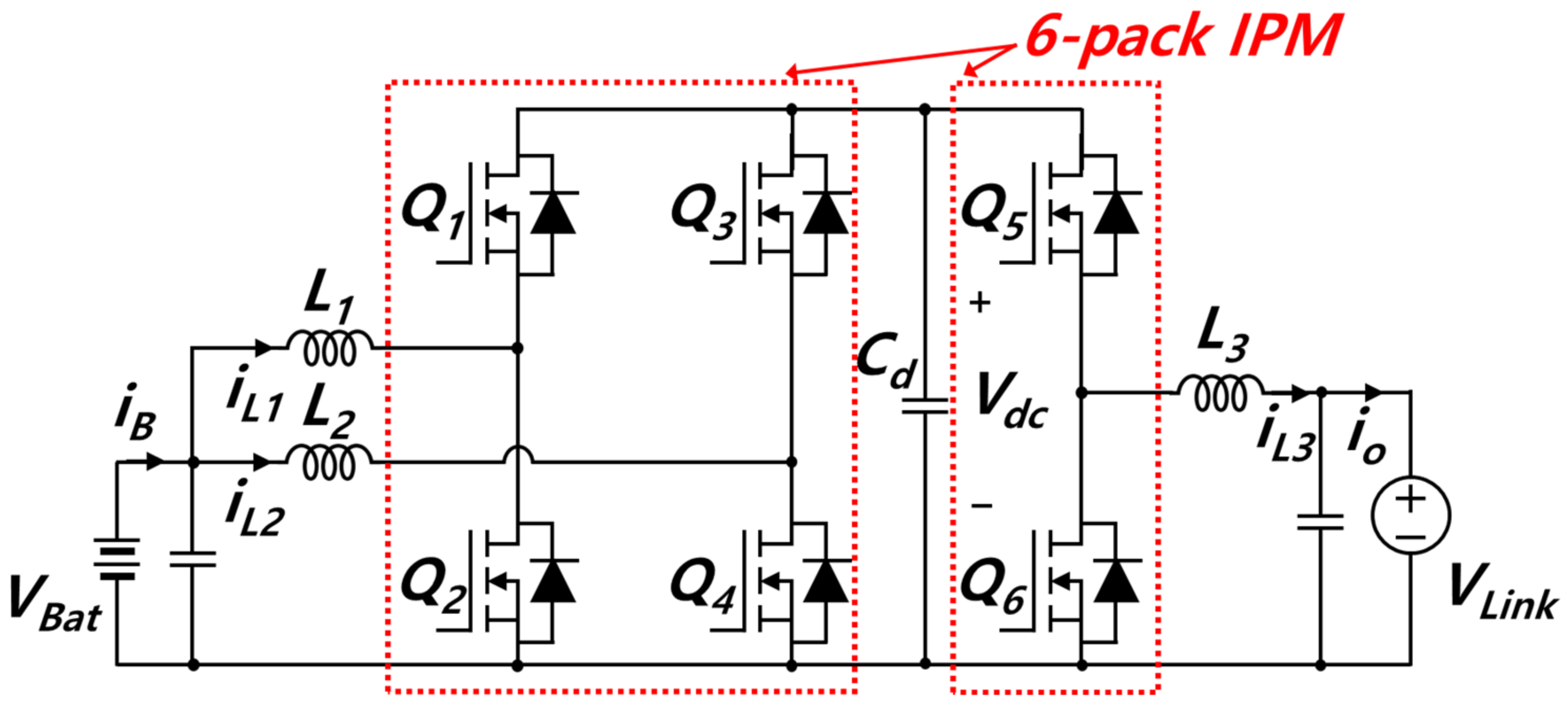
3.1. Topology Selection
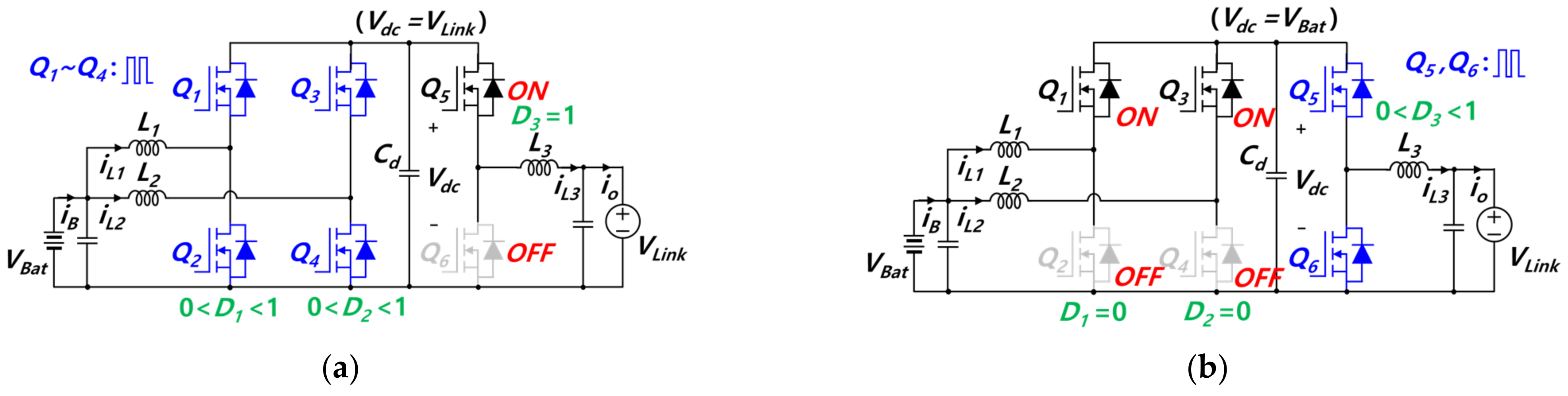
3.2. Hybrid Switching Technique
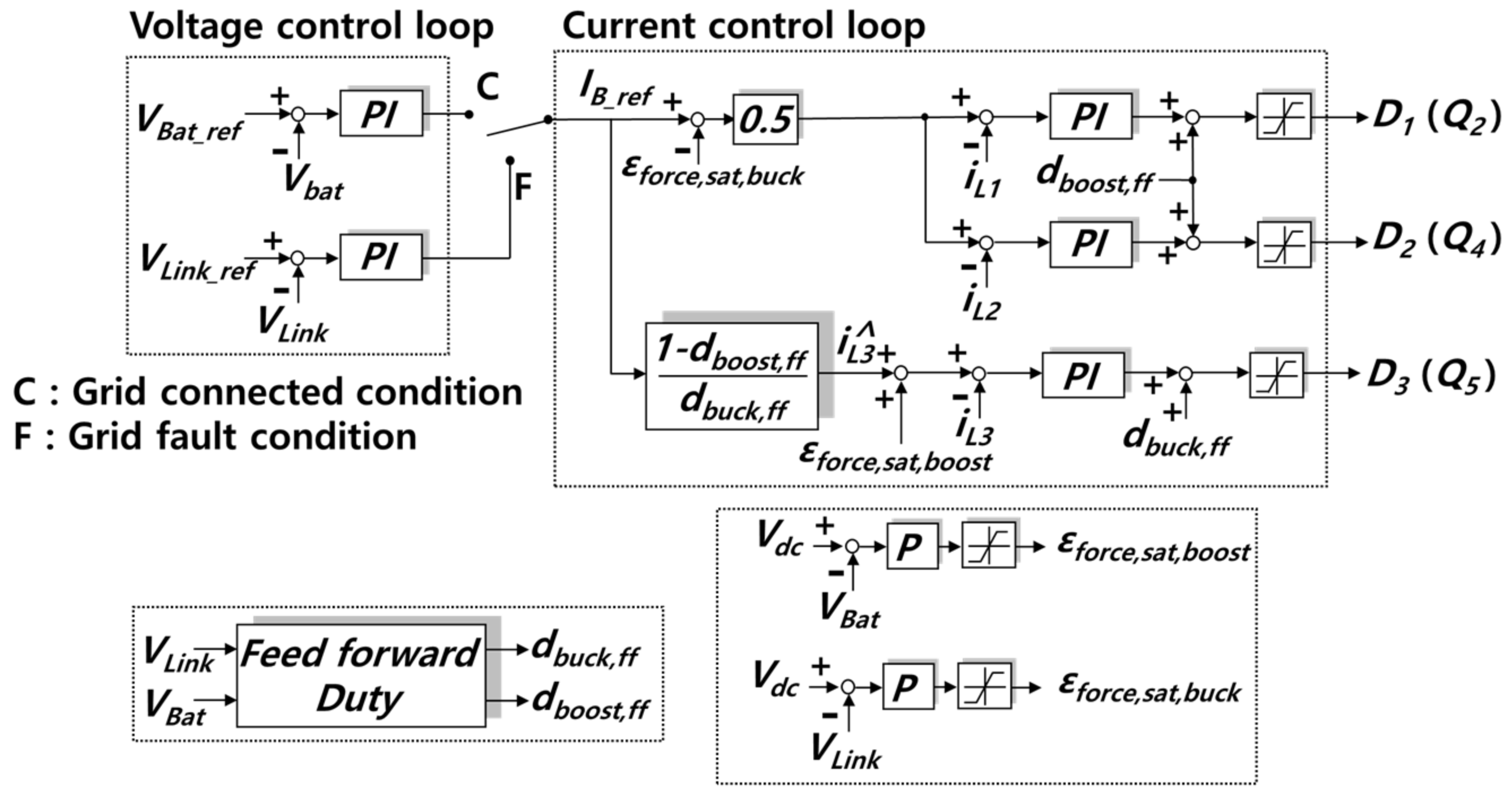
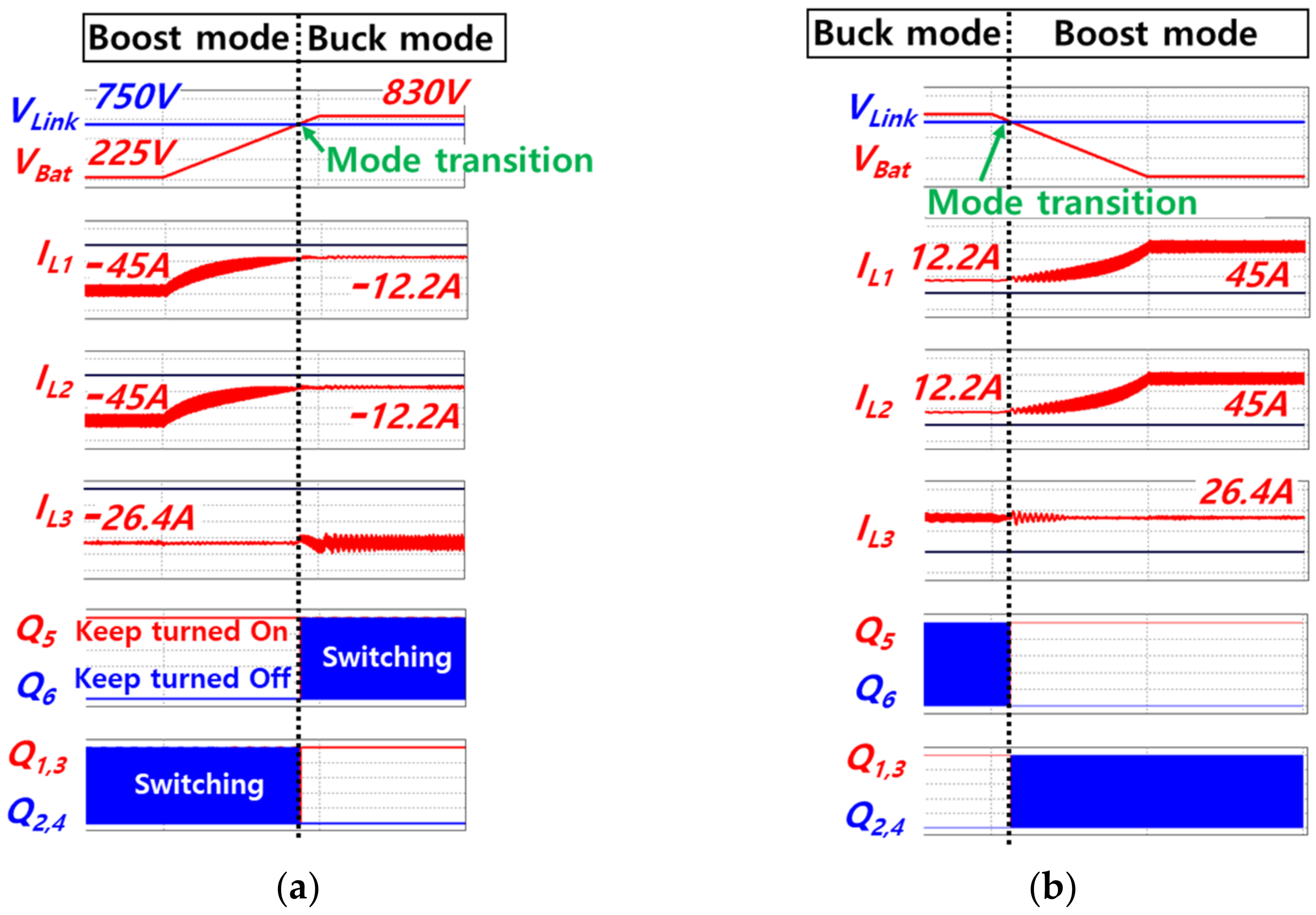
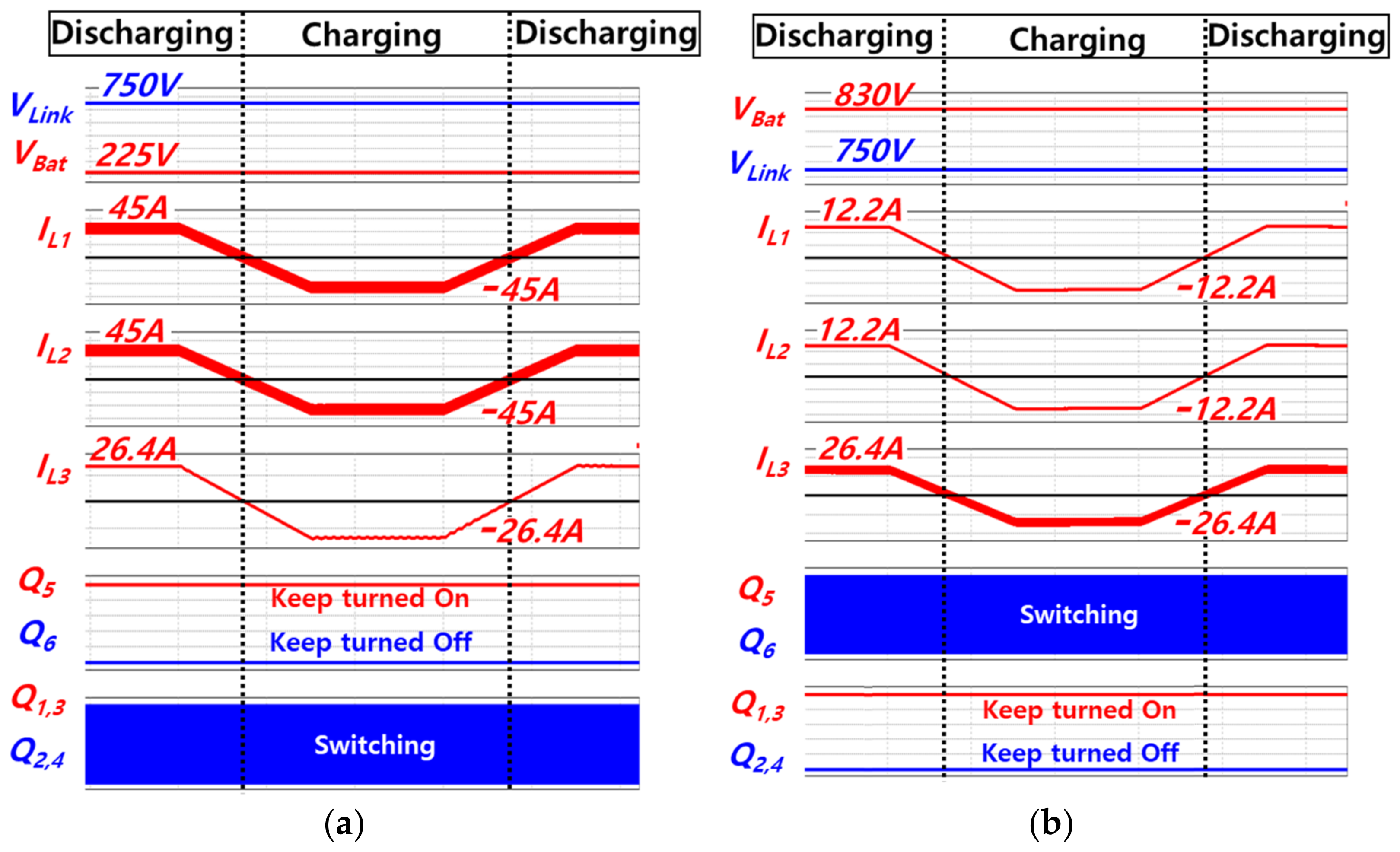
3.3. Control Algorithm to Implement Seamless and Autonomous Mode Transition
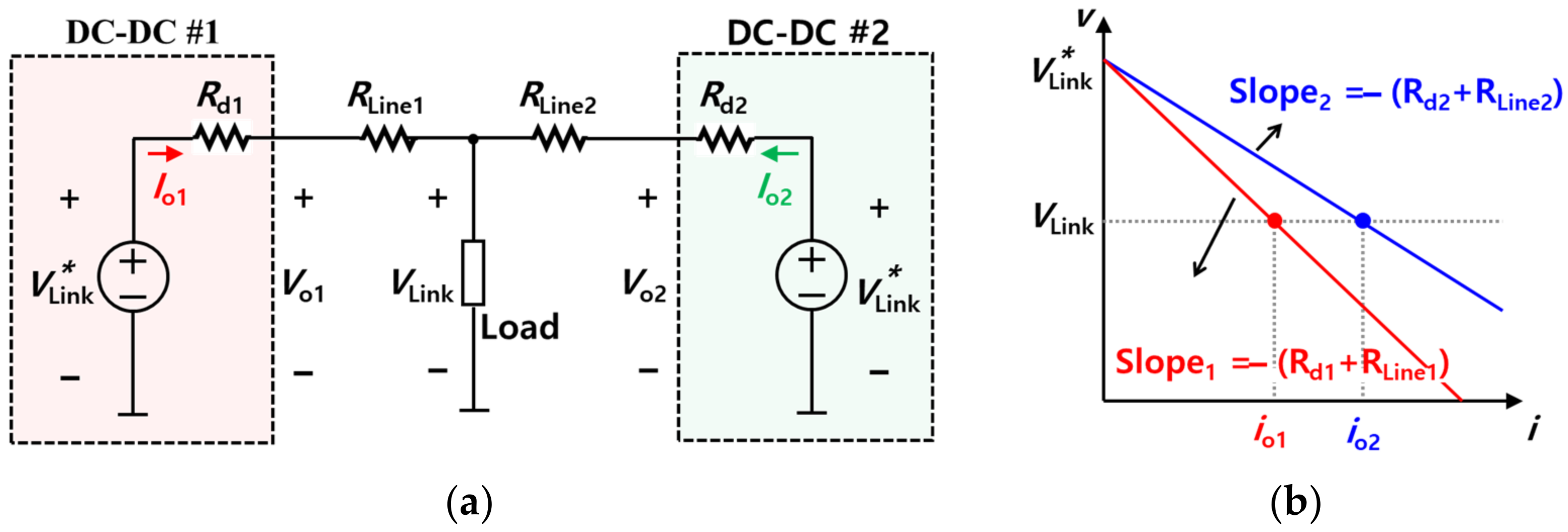
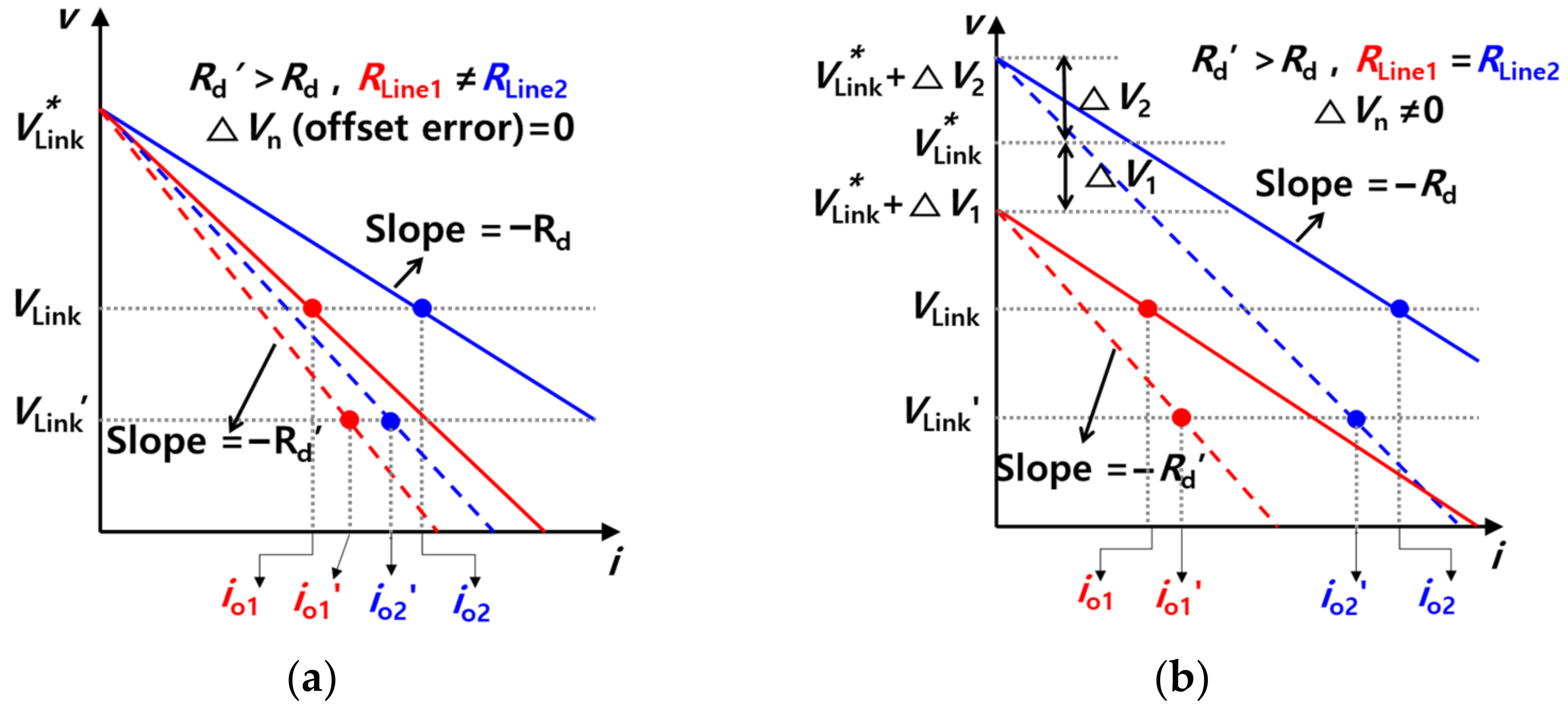
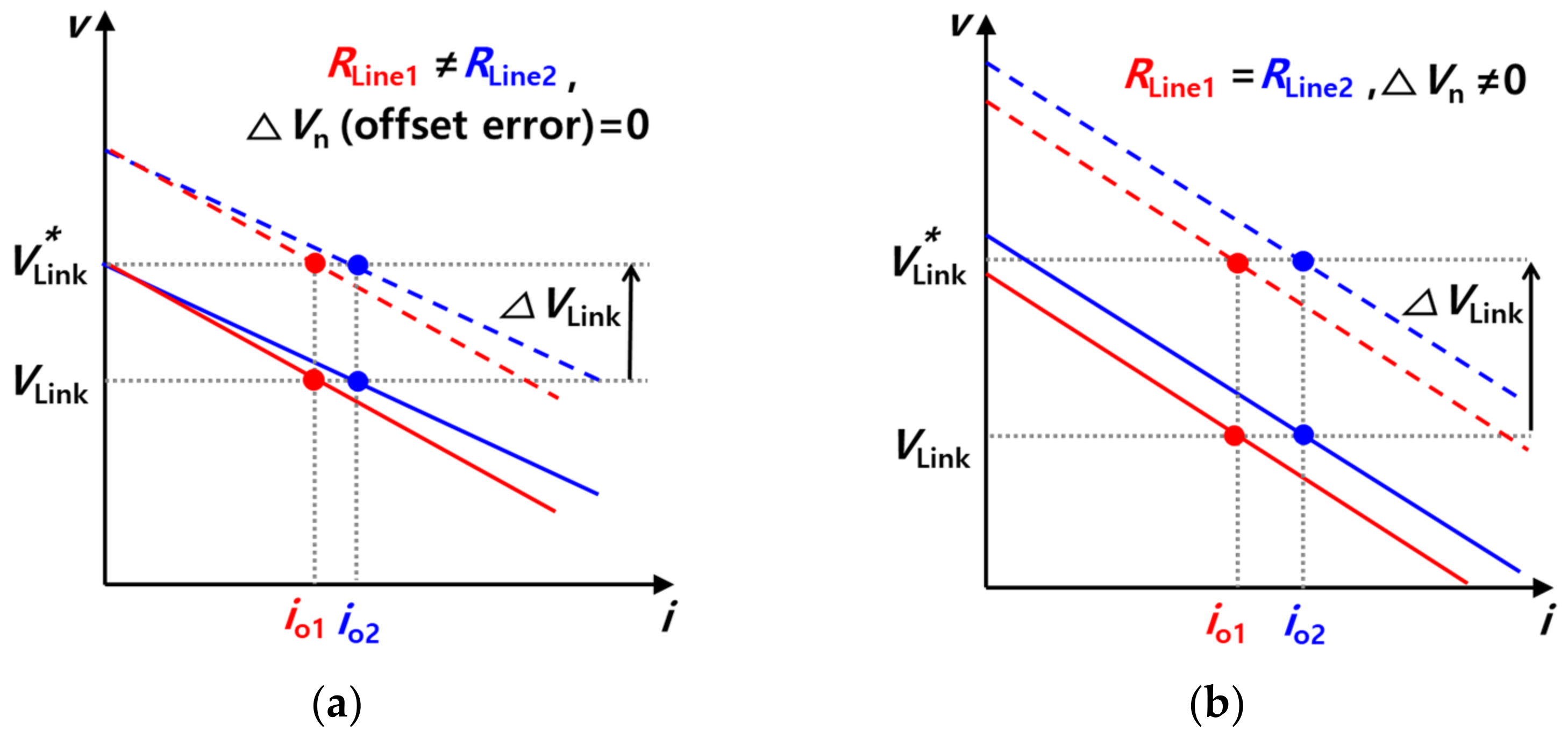
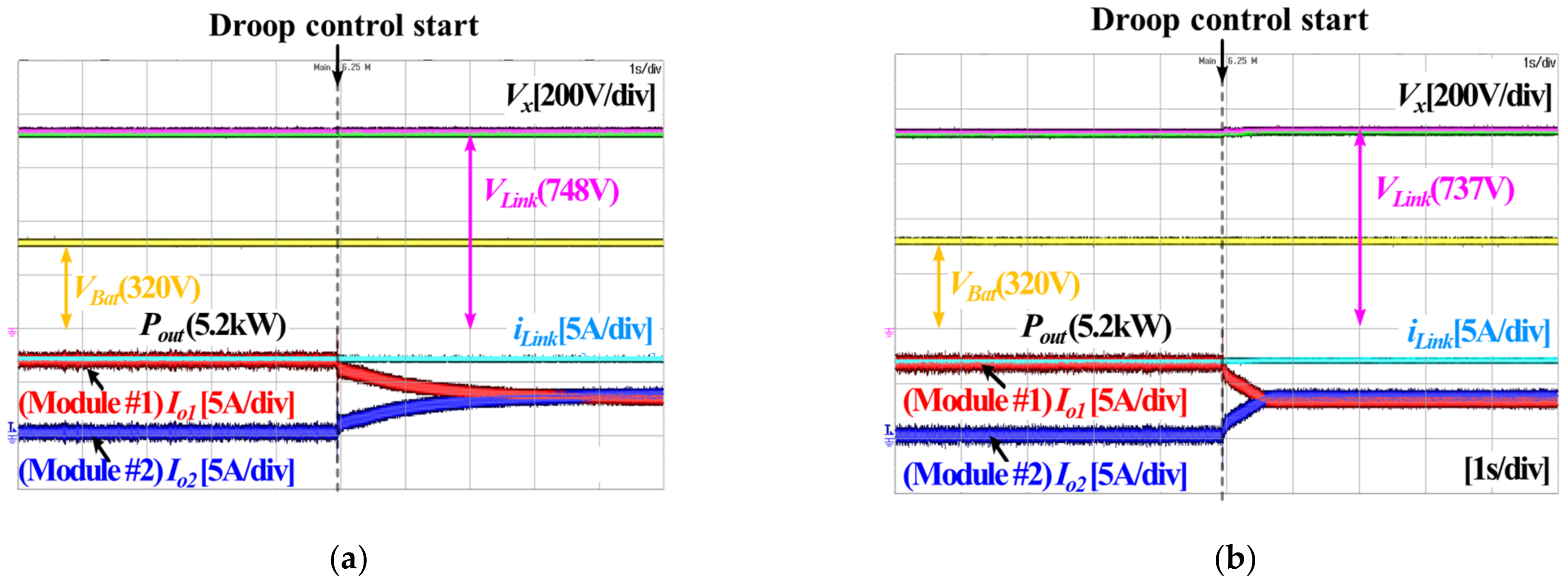
4. Parallel Operation Using DC Droop Control
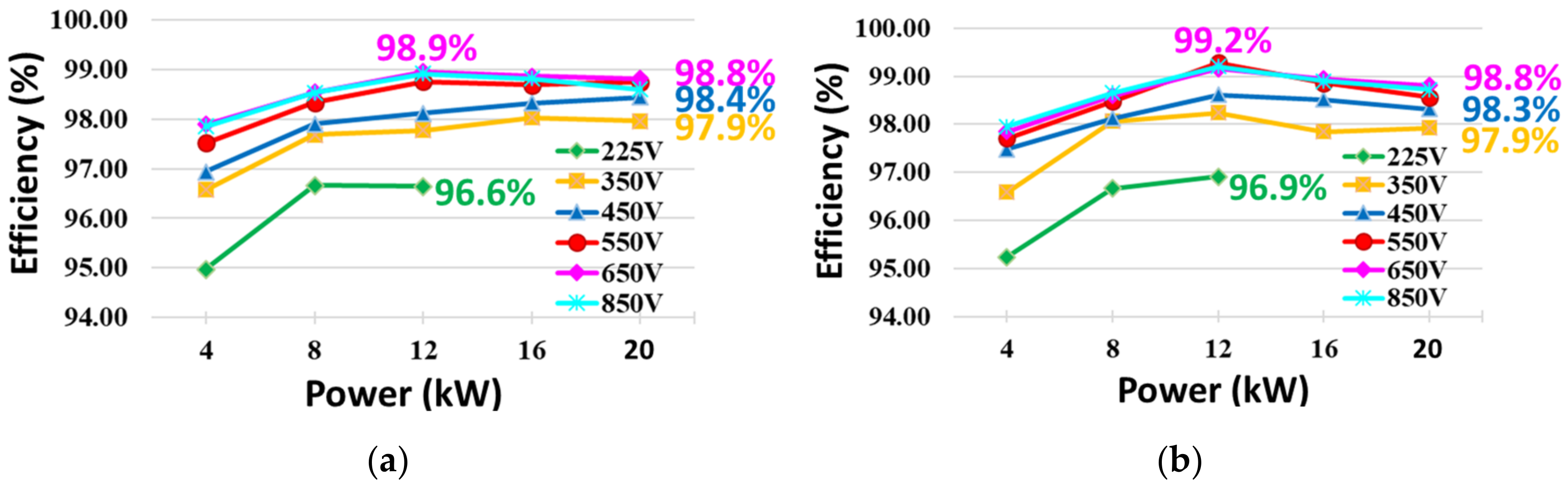
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning |
|---|---|
| VBat | Battery voltage |
| VLink | DC-link voltage |
| Vdc | Voltage of capacitor, which the middle position of the topology |
| D1 | Duty for Q2 (Switch) |
| D2 | Duty for Q4 (Switch) |
| D3 | Duty for Q5 (Switch) |
| dboost,ff | Feed forward duty for boost mode |
| dbuck,ff | Feed forward duty for buck mode |
| Predicted inductor (L3) current | |
| εforce,sat,buck | Parameter for forcing saturation of current controller of iL1 and iL2 in buck mode |
| εforce,sat,boost | Parameter for forcing saturation of controller of iL3 in boost mode |
| Rd | Virtual resistance |
| Rline | Line resistance |
| ΔVn | Offset error for VLink reference |
References
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef]
- Zia, M.F.; Benbouzid, M.; Elbouchikhi, E.; Muyeen, S.M.; Techato, K.; Guerrero, J.M. Microgrid Transactive Energy: Review, Architectures, Distributed Ledger Technologies, and Market Analysis. IEEE Access 2020, 8, 19410–19432. [Google Scholar] [CrossRef]
- Peyghami, S.; Palensky, P.; Blaabjerg, F. An Overview on the Reliability of Modern Power Electronic Based Power Systems. IEEE Open J. Power Electron. 2020, 1, 34–50. [Google Scholar] [CrossRef]
- Xu, Q.; Vafamand, N.; Chen, L.; Dragicevic, T.; Xie, L.; Blaabjerg, F. Review on Advanced Control Technologies for Bidirectional DC/DC Converters in DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1205–1221. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Lagos, D.; Wies, R.W.; Paolone, M.; Liserre, M.; Meegahapola, L.; Kabalan, M.; Hajimiragha, A.H.; Peralta, D.; Elizondo, M.A.; et al. Microgrid Stability Definitions, Analysis, and Examples. IEEE Trans. Power Syst. 2020, 35, 13–29. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-Forming Inverters: A Critical Asset for the Power Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 925–935. [Google Scholar] [CrossRef]
- Guerrero, J.; Blaabjerg, F.; Zhelev, T.; Hemmes, K.; Monmasson, E.; Jemeï, S.; Comech, M.P.; Granadino, R.; Frau, J.I. Distributed Generation: Toward a New Energy Paradigm. IEEE Ind. Electron. Mag. 2010, 4, 52–64. [Google Scholar] [CrossRef]
- Vilathgamuwa, D.M.; Gajanayake, C.J.; Loh, P.C. Modulation and Control of Three-Phase Paralleled Z-Source Inverters for Distributed Generation Applications. IEEE Trans. Energy Convers. 2009, 24, 173–183. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galván, E.; Portillo Guisado, R.C.; Prats, M.Á.M.; León, J.I.; Moreno-Alfonso, N. Power-Electronic Systems for the Grid Integration of Renewable Energy Sources: A Survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Pindoriya, N.M.; Rajendran, S. Simulation of DC/DC Converter for DC Nano-Grid Integrated with Solar PV Generation. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies–Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015. [Google Scholar] [CrossRef]
- Yoomak, S.; Ngaopitakkul, A. Development of Sustainable Nanogrid Road Lighting Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6682–6699. [Google Scholar] [CrossRef]
- Anita, S.; Sukhi, Y.; Elakkia, E. DC and AC Micro Grid Comparative Analysis. In Proceedings of the International Interdisciplinary Humanitarian Conference for Sustainability(IIHC), Bengaluru, India, 18–19 November 2022; pp. 1156–1160. [Google Scholar] [CrossRef]
- Sengarap, S.; Kastha, D.; Bajpai, P. Design and Analysis of A Novel Current-Fed Three Level Three Limb TAB Converter with Auxilary Inductor for DC Micro-Grid Application. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition(APEC) 2023, Orlando, FL, USA, 19–23 March 2023; pp. 2136–2143. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of Dual-Active-Bridge Isolated Bidirectional DC–DC Converter for High-Frequency-Link Power-Conversion System. IEEE Trans. Power Electron. 2014, 29, 4091–4106. [Google Scholar] [CrossRef]
- Lee, M.; Choi, D.; Chae, J.; Cheon, S.; Moon, G. Voltage-Balancing Dual-Active-Bridge (VB-DAB) Converter for Bipolar DC Distribution System. IEEE Trans. Ind. Electron. 2023, 70, 2461–2471. [Google Scholar] [CrossRef]
- Qin, D.; Sun, Q.; Wang, R.; Ma, D.; Liu, M. Adaptive bidirectional droop control for electric vehicles parking with vehicle-to-grid service in microgrid. CSEE J. Power Energy Syst. 2020, 6, 793–805. [Google Scholar] [CrossRef]
- Le, T.; Kim, S.; Choi, S. A Four-Phase Current-Fed Push–Pull DAB Converter for Wide-Voltage-Range Applications. IEEE Trans. Power Electron. 2021, 36, 11383–11396. [Google Scholar] [CrossRef]
- Le, T.; Nguyen, M.; Duong, T.; Wang, C.; Choi, S. Open-Circuit Fault-Tolerant Control for a Three-Phase Current-Fed Dual Active Bridge DC–DC Converter. IEEE Trans. Ind. Electron. 2023, 70, 1586–1596. [Google Scholar] [CrossRef]
- Qin, D.; Sun, Q.; Ma, D.; Sun, J. Model Predictive control of dual-active-bridge based fast battery charger for plug-in hybrid electric vehicle in the future grid. In Proceedings of the IEEE Innovative Smart Grid Technologies–Asia (ISGT Asia) 2019, Chengdu, China, 21–24 May 2019. [Google Scholar] [CrossRef]
- Paul, A.R.; Bhattacharya, A.; Chatterjee, K. A Single-Phase Grid-Connected Boost/Buck-Boost-Derived Solar PV Micro-Inverter Topology Having Power Decoupling Capability. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 2340–2349. [Google Scholar] [CrossRef]
- Lai, C.-M.; Lin, Y.-C.; Lin, Y.-J. Newly-Constructed Bidirectional DC/DC Converter Topology with High Voltage Conversion Ratio for Vehicle to DC-Microgrid (V2DCG) System. In Proceedings of the IEEE 2nd International Future Energy Electronics Conference (IFEEC), Taipei, Taiwan, 1–4 November 2015. [Google Scholar] [CrossRef]
- Lekic, A.; Stipanoviclekic, D.M. Hysteresis Switching Control of the Ćuk Converter Operating in Discontinuous Conduction Modes. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 1077–1081. [Google Scholar] [CrossRef]
- Lee, S.W.; Do, H.L. Zero-Ripple Input-Current High-Step-Up Boost-SEPIC DC-DC Converter with Reduced Switch-Voltage Stress. IEEE Trans. Power Electron. 2017, 32, 6170–6177. [Google Scholar] [CrossRef]
- Park, K.B.; Moon, G.W.; Youn, M.J. Nonisolated High Step-up Boost Converter Integrated with Sepic Converter. IEEE Trans. Power Electron. 2010, 25, 2266–2275. [Google Scholar] [CrossRef]
- Rana, N.; Banerjee, S.; Giri, S.K.; Trivedi, A.; Williamson, S.S. Modeling, Analysis and Implementation of an Improved Interleaved Buck-Boost Converter. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2588–2592. [Google Scholar] [CrossRef]
- Ardi, H.; Ajami, A. Study on a High Voltage Gain SEPIC-Based DC-DC Converter with Continuous Input Current for Sustainable Energy Applications. IEEE Trans. Power Electron. 2018, 33, 10403–10409. [Google Scholar] [CrossRef]
- Anand, A.; Singh, B. Modified Dual Output Cuk Converter-Fed Switched Reluctance Motor Drive with Power Factor Correction. IEEE Trans. Power Electron. 2019, 34, 624–635. [Google Scholar] [CrossRef]
- Pandey, R.; Singh, B. A Power-Factor-Corrected LLC Resonant Converter for Electric Vehicle Charger Using Cuk Converter. IEEE Trans. Ind. Appl. 2019, 55, 6278–6286. [Google Scholar] [CrossRef]
- Sathyan, S.; Suryawanshi, H.M.; Shitole, A.B.; Ballal, M.S.; Borghate, V.B. Soft-Switched Interleaved DC/DC Converter as Front-End of Multi-Inverter Structure for Micro Grid Applications. IEEE Trans. Power Electron. 2018, 33, 7645–7655. [Google Scholar] [CrossRef]
- Garg, A.; Tummuru, N.R.; Oruganti, R. Implementation of Energy Management Scenarios in a DC Microgrid Using DC Bus Signaling. IEEE Trans. Ind. Appl. 2021, 57, 5306–5317. [Google Scholar] [CrossRef]
- Braitor, A.C.; Konstantopoulos, G.C.; Kadirkamanathan, V. Current-Limiting Droop Control Design and Stability Analysis for Paralleled Boost Converters in DC Microgrids. IEEE Trans. Control Syst. Technol. 2021, 29, 385–394. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An Intelligent Droop Control for Simultaneous Voltage and Frequency Regulation in Islanded Microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Chen, Z.; Lasseter, R.H.; Jahns, T.M. Overcurrent Limiting and DC Bus Voltage Ripple Minimization in Grid-Forming PV Sources under Grid Voltage Sags. In Proceedings of the IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019. [Google Scholar] [CrossRef]
- Fan, B.; Li, Q.; Wang, W.; Yao, G.; Ma, H.; Zeng, X.; Guerrero, J. A Novel Droop Control Strategy of Reactive Power Sharing Based on Adaptive Virtual Impedance in Microgrids. IEEE Trans. Ind. Electron. 2022, 69, 11335–11347. [Google Scholar] [CrossRef]
- Zhao, X.; Meng, L.; Dragicevic, T.; Savaghebi, M.; Guerrero, J.M.; Vasquez, J.C.; Wu, X. Distributed Low Voltage Ride-Through Operation of Power Converter in Grid-Connected Microgrids under Voltage Sags. In Proceedings of the 2015 IEEE Industrial Electronics Society, Annual Conference (IECON), Yokohama, Japan, 9–12 November 2015. [Google Scholar] [CrossRef]
- Triki, Y.; Bechouche, A.; Seddiki, H.; Abdeslam, D.O. A Smart Battery Charger Based on a Cascaded Boost-Buck Converter for Photovoltaic Applications. In Proceedings of the IEEE Industrial Electronics Society, Annual Conference (IECON) 2018, Washington, DC, USA, 21–23 October 2018. [Google Scholar] [CrossRef]
- Anuraag, B.V.; Mahalakshmi, R.; Likhtih, S.; Bhargavi, P.; Mohanty, A. Design and Comparative Study of DC-DC Quadratic Buck-Boost Converter and Cascaded Buck-Boost Converter. In Proceedings of the 2021 International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT), Bangalore, India, 27–28 August 2021; pp. 642–646. [Google Scholar] [CrossRef]
- Duran, E.; Cardona, S.D.; Galan, J.; Andujar, J.M. Comparative analysis of buck-boost converters used to obtain I-V characteristic curves of photovoltaic modules. In Proceedings of the IEEE Power Electronics Specilists Conference (PESC) 2008, Rhodes, Greece, 15–19 June 2008. [Google Scholar] [CrossRef]
- Rana, N.; Banerjee, S. Development of an Improved Input-Parallel Output-Series Buck-Boost Converter and Its Closed-Loop Control. IEEE Trans. Ind. Electron. 2020, 67, 6428–6438. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Chang, Y.C.; Wei, C.L. Mixed-Ripple Adaptive On-Time Controlled Non-Inverting Buck-Boost DC-DC Converter with Adaptive-Window-Based Mode Selector. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2196–2200. [Google Scholar] [CrossRef]
- Wang, S.; Gao, M.; Shi, J. A ZVS Buck/Boost Converter with Coupled-Filter-Inductor. In Proceedings of the 2022 International Conference on Power, Energy and Electrical Engineering (CPEEE), Shiga, Japan, 25–27 February 2022; pp. 180–184. [Google Scholar] [CrossRef]
- Sozzi, G.; Sapienza, S.; Nipoti, R.; Chiorboli, G. OCVD Measurement of Ambipolar and Minority Carrier Lifetime in 4H-SiC Devices: Relevance of the Measurement Setup. IEEE Trans. Electron. Devices 2021, 68, 3254–3260. [Google Scholar] [CrossRef]
- Chowdhury, S.S.; Arifin, F. The Effects of the Substrate Doping Concentrations on 6H-SiC Nano-Scale GgNMOS ESD Protection Device. In Proceedings of the 2021 International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 5–7 January 2021; pp. 329–333. [Google Scholar] [CrossRef]
- Mori, S.; Aketa, M.; Sakaguchi, T.; Asahara, H.; Nakamura, T.; Kimoto, T. Suppression of Punch-Through Current in 3 KV 4H-SiC Reverse-Blocking MOSFET by Using Highly Doped Drift Layer. IEEE J. Electron. Devices Soc. 2018, 6, 449–453. [Google Scholar] [CrossRef]
- Glitz, E.S.; Ordonez, M. MOSFET Power Loss Estimation in LLC Resonant Converters: Time Interval Analysis. IEEE Trans. Power Electron. 2019, 34, 11964–11980. [Google Scholar] [CrossRef]
- Luo, F.L.; Ye, H. Small Signal Analysis of Energy Factor and Mathematical Modeling for Power Dc-Dc Converters. IEEE Trans. Power Electron. 2007, 22, 69–79. [Google Scholar] [CrossRef]








| Parameter | Value | |
|---|---|---|
| PV | Voltage range | 225–830 V |
| Input power | 120 kW | |
| Battery | Voltage range | 225–830 V |
| Input power | 80 kW | |
| DC-DC Converter | Output power | 20 kW |
| DC-link voltage | 700–750 V | |
| Nominal DC-link voltage | 750 V | |
| Efficiency | 98.5% (@20 kW) | |
| Charging method | CC, CP, and CV |
| Parameter | Figure 2c | Proposed | |
|---|---|---|---|
| Switch | Vpeak, Ipeak (No. of switches) | 830 V, 63 A (2) | 750 V, 63 A (2) |
| 830 V, 20 A (2) | 830 V, 63 A (2) | ||
| 750 V, 63 A (2) | 830 V, 34 A (2) | ||
| Total number | 6 | 6 | |
| Capacitor | Irms (No. of switches) | 27 uF, 27 A, (1) | 27 uF, 2.2 A, (2) |
| 125 uF, 2.2 A, (1) | 125 uF, 27 A, (1) | ||
| Inductor | Irms (No. of switches) | 600 uH, 56 A, (2) | 600 uH, 56 A, (2) |
| 600 uH, 33 A, (1) | |||
| Necessity of additional filter on input and output | Yes | No | |
| Saturation Parameter | Boost Mode | Buck Mode |
|---|---|---|
| εforce,sat,buck | 0 | α 1 |
| εforce,sat,boost | α 1 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Choi, S. Bidirectional Six-Pack SiC Boost–Buck Converter Using Droop Control in DC Nano-Grid. Sensors 2023, 23, 8777. https://doi.org/10.3390/s23218777
Kim Y, Choi S. Bidirectional Six-Pack SiC Boost–Buck Converter Using Droop Control in DC Nano-Grid. Sensors. 2023; 23(21):8777. https://doi.org/10.3390/s23218777
Chicago/Turabian StyleKim, Yeonwoo, and Sewan Choi. 2023. "Bidirectional Six-Pack SiC Boost–Buck Converter Using Droop Control in DC Nano-Grid" Sensors 23, no. 21: 8777. https://doi.org/10.3390/s23218777
APA StyleKim, Y., & Choi, S. (2023). Bidirectional Six-Pack SiC Boost–Buck Converter Using Droop Control in DC Nano-Grid. Sensors, 23(21), 8777. https://doi.org/10.3390/s23218777