1. Introduction
The operation of mechanical equipment heavily relies on the performance of rolling bearings, which highlights their crucial role. Ensuring the safe functioning of bearings not only minimizes economic losses for enterprises but also prevents potential casualties [
1,
2]. The vibration signal emitted by rolling bearings typically carries valuable information regarding their operational faults, thereby offering a promising avenue for accurate fault diagnosis in mechanical research on fault diagnosis, which has extensively explored this area based on vibration signals.
In fault diagnosis based on vibration signals, He et al. [
3] installed vibration sensors on mechanical equipment for detection and proposed a research method for fault diagnosis of rotating machinery. Chen et al. [
4] used vibration sensors to detect the long-term health status of wind turbines and established a quantitative index of the damage degree of wind turbine bearing failure. Teng et al. [
5] tested the bearing fault of a 2 MW wind turbine and demodulated the collected vibration signals, successfully proving that the cyclic spectrum correlation method can effectively identify the fault characteristics of rolling bearings. Qiao et al. [
6] made a fault diagnosis of rotating machinery based on vibration signals and successfully extracted early weak fault characteristics of rolling bearings by using a stochastic resonance method. Miao et al. [
7] proposed an improved adaptive variational mode decomposition method and used vibration signals to realize composite fault diagnosis of rotating machinery bearings.
Although the above methods can successfully identify the fault characteristics of bearings, they are all based on vibration signals. The fault diagnosis of vibration signals belongs to contact measurement, and the reasonable installation of a vibration sensor has certain requirements regarding its location. For some complex and precise equipment or for instances when the field sensor installation is limited, higher requirements for the sensor layout are put forward; in these cases, acoustic sensors can be used in a noncontact way to collect the acoustic radiation signal of the equipment [
8,
9]. Additionally, the irregular geometry of certain equipment often hinders direct sensor installation.
Acoustic radiation signals contain rich operating-status information of rolling bearings. In fault diagnosis research based on acoustic signals, some scholars have undertaken the following work: fault classification [
10], fault prediction [
11], and condition monitoring [
12] of rotating machinery based on sound signals. And the integration of deep learning techniques [
13,
14,
15,
16] with acoustic radiation signals is specifically emphasized.
For example, Josu’e Pacheco-Ch’errez [
17] used three different supervised machine learning methods for comparative analysis to improve the fault prediction accuracy of rotating machinery. Wang et al. [
18] proposed a multimodal sensor signal fusion method for acceleration signal and sound signal acquisition, which extracts features from the original vibration signal and acoustic signal, uses a CNN network to fuse them, and finally realizes the fault classification of rolling bearings. In order to solve the bearing fault problem of CNC machine tools, Mohmad lqbal [
19] proposed a fault diagnosis method based on the acoustic signal of a convolutional neural network, and the research shows that this method can realize the classification of bearing faults. Eugenio Brusa [
20] applied the transfer learning strategy to the fault diagnosis of rolling bearings and verified that the deep learning architecture based on sound signals can realize the fault diagnosis of machines. Bai et al. [
21] fused sound and vibration signals to improve the detection accuracy of rolling bearing fault characteristics, which is conducive to the condition monitoring of bearing systems. Zhang et al. [
22] focused on the fault diagnosis of offshore wind power equipment using acoustic emission signals and vibration signals. The advantages of acoustic emission sensors include their high sensitivity, precision, and ability to acquire large amounts of data. However, they are limited in their application to specific fields for nondestructive testing and lack wide-ranging applicability.
Although the aforementioned studies made certain advancements in deep learning, their utilization of convolution kernel size is overly simplistic and predominantly relies on single-channel diagnosis, thereby limiting the effective extraction of more comprehensive fault feature information. Moreover, the sound signal is seriously disturbed by background noise, so the question of how to filter the collected sound signal is very important. For complex equipment in the process of operation, the collected signal contains a lot of interference information and shows strong nonstationarity. If the collected original signal is directly input into the neural network, the network will learn many invalid features, resulting in a reduction in classification accuracy. Therefore, the question of how to effectively use sound signal and a deep learning algorithm to achieve fault diagnosis of rolling bearings is very important.
Based on the above research, this paper presents a new method of rolling bearing fault diagnosis based on a multichannel acoustic array signal and multinetwork module combination. The main work of this paper is as follows:
- (1)
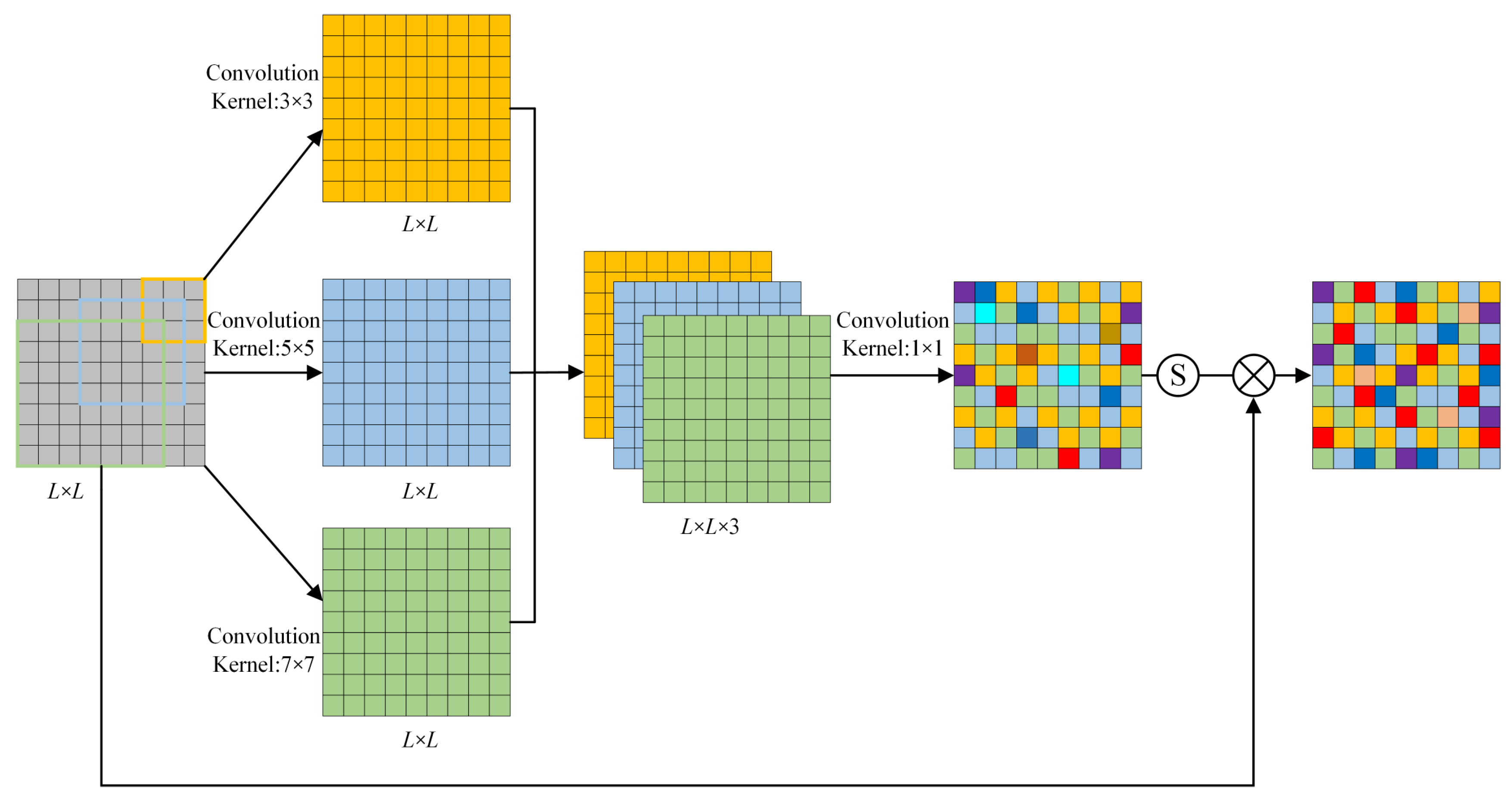
An IFSM is developed, which utilizes three convolutional filters of varying sizes to process input image data.
- (2)
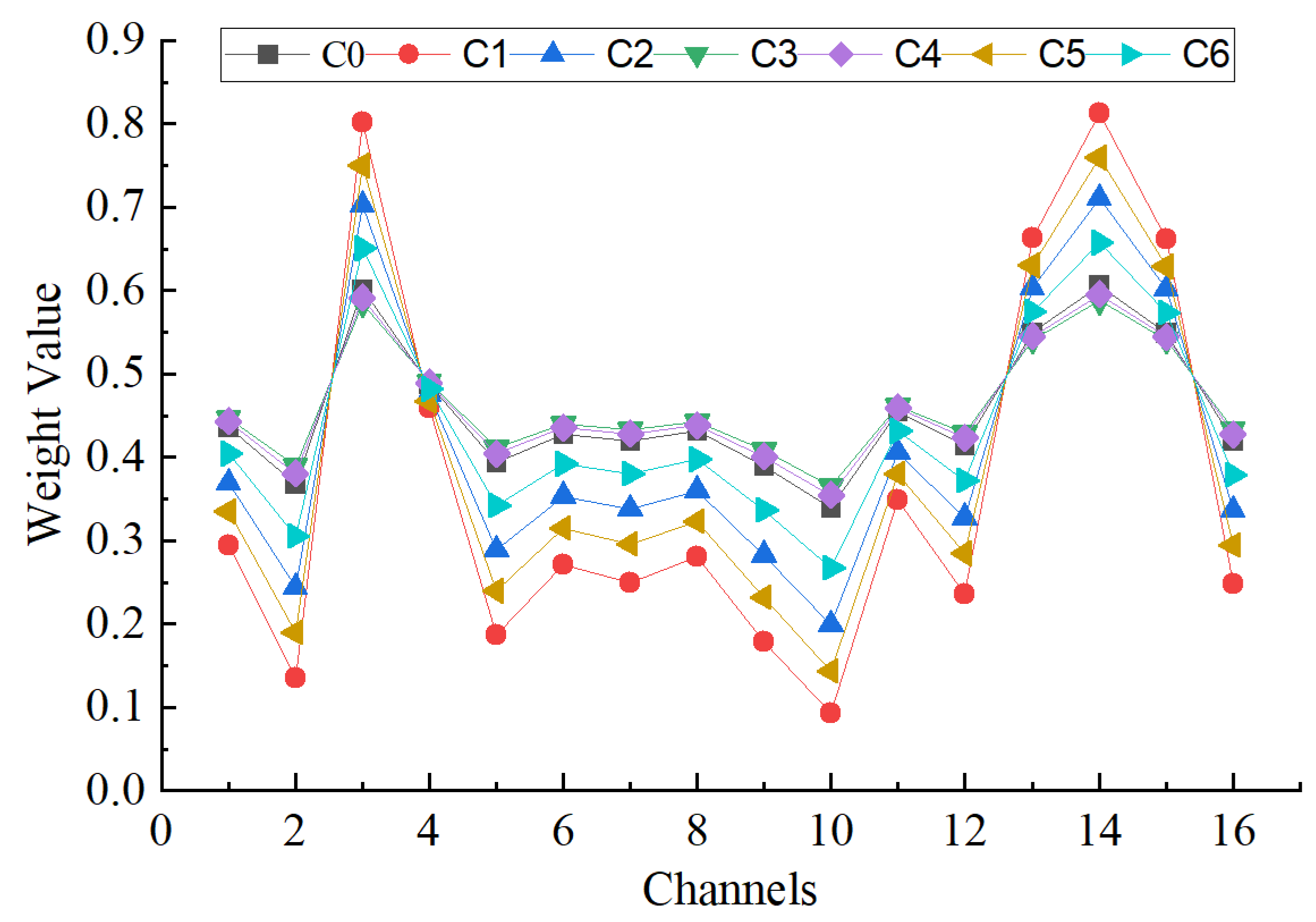
The CAMM is constructed, and it is utilized to assign weights to all branch channels, thereby achieving the refinement of fault information.
- (3)
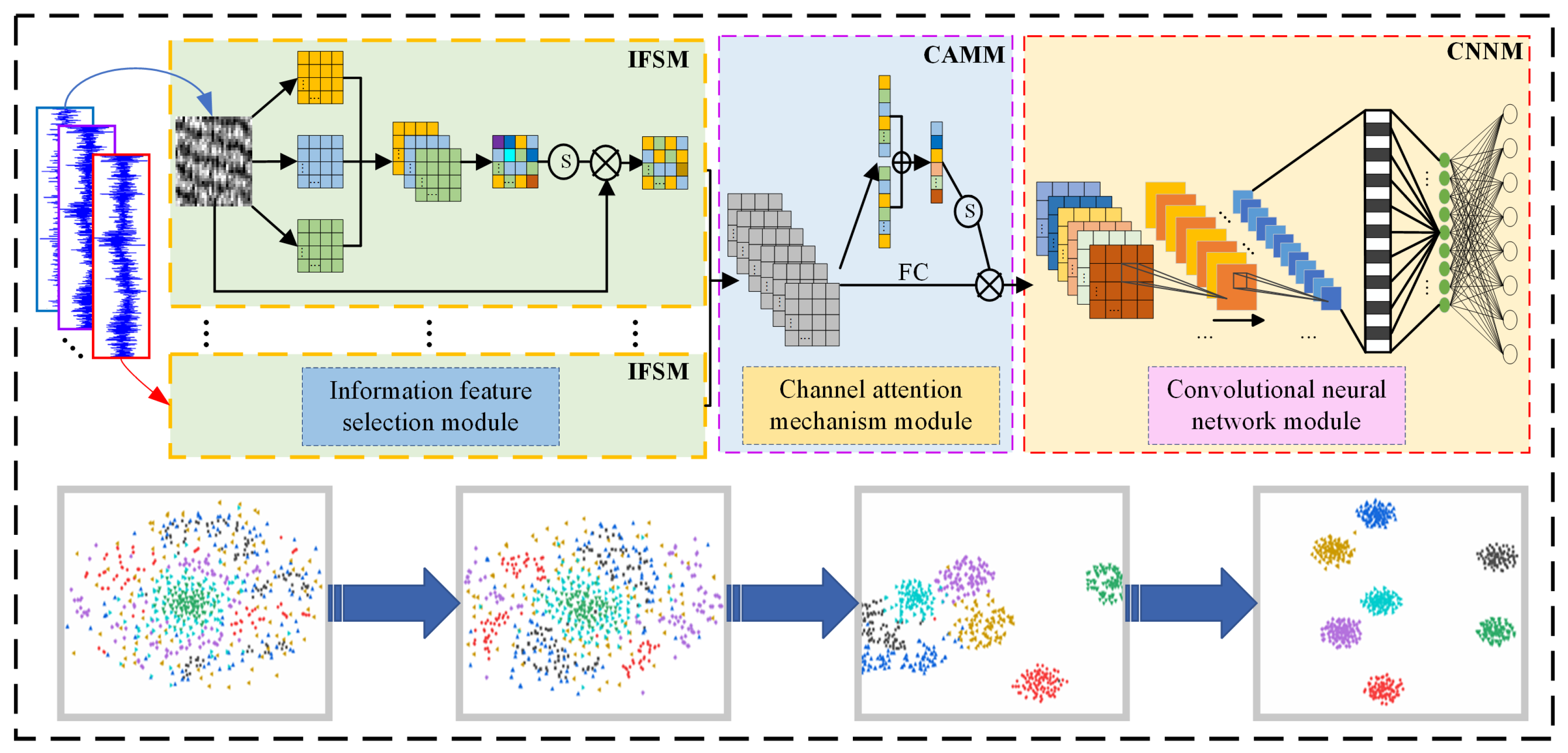
The research on fault diagnosis method for rolling bearings based on sound signals is accomplished by constructing a deep learning network framework that integrates the IFSM, CAMM, and CNNM.
The rest of this article is described below. In
Section 2, the proposed theoretical method is introduced in detail. In
Section 3, experiments are used to verify the effectiveness of the proposed method. Finally, the conclusion of this paper is introduced.
4. Conclusions
The installation of vibration sensors may not be feasible under certain special conditions, leading to serious problems with susceptibility to background noise interference in sound signals. To address this issue, a research method for rolling bearings is proposed that includes data preprocessing, information feature selection, a channel attention mechanism, and a convolutional neural network. The following conclusions are drawn:
- (1)
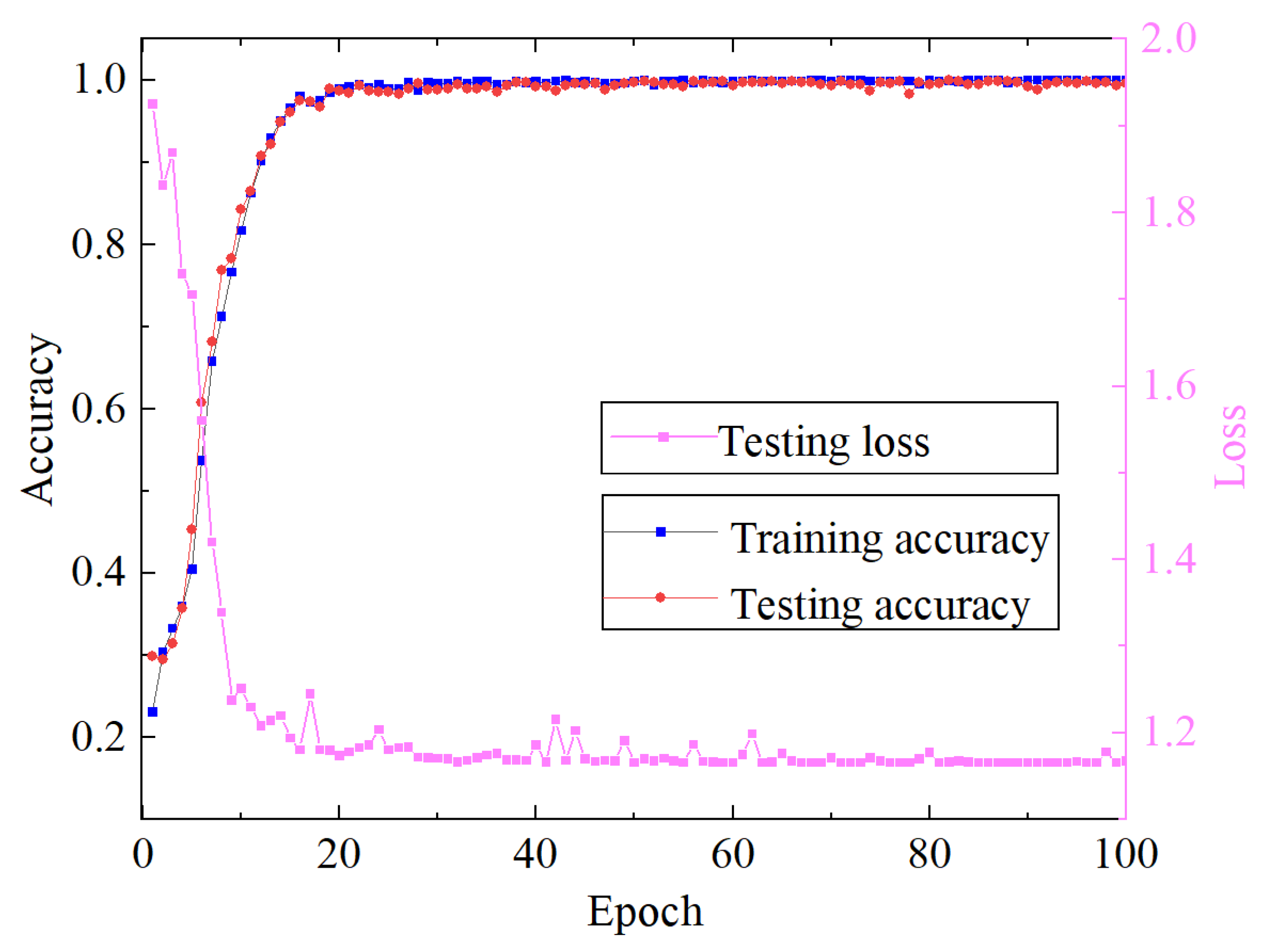
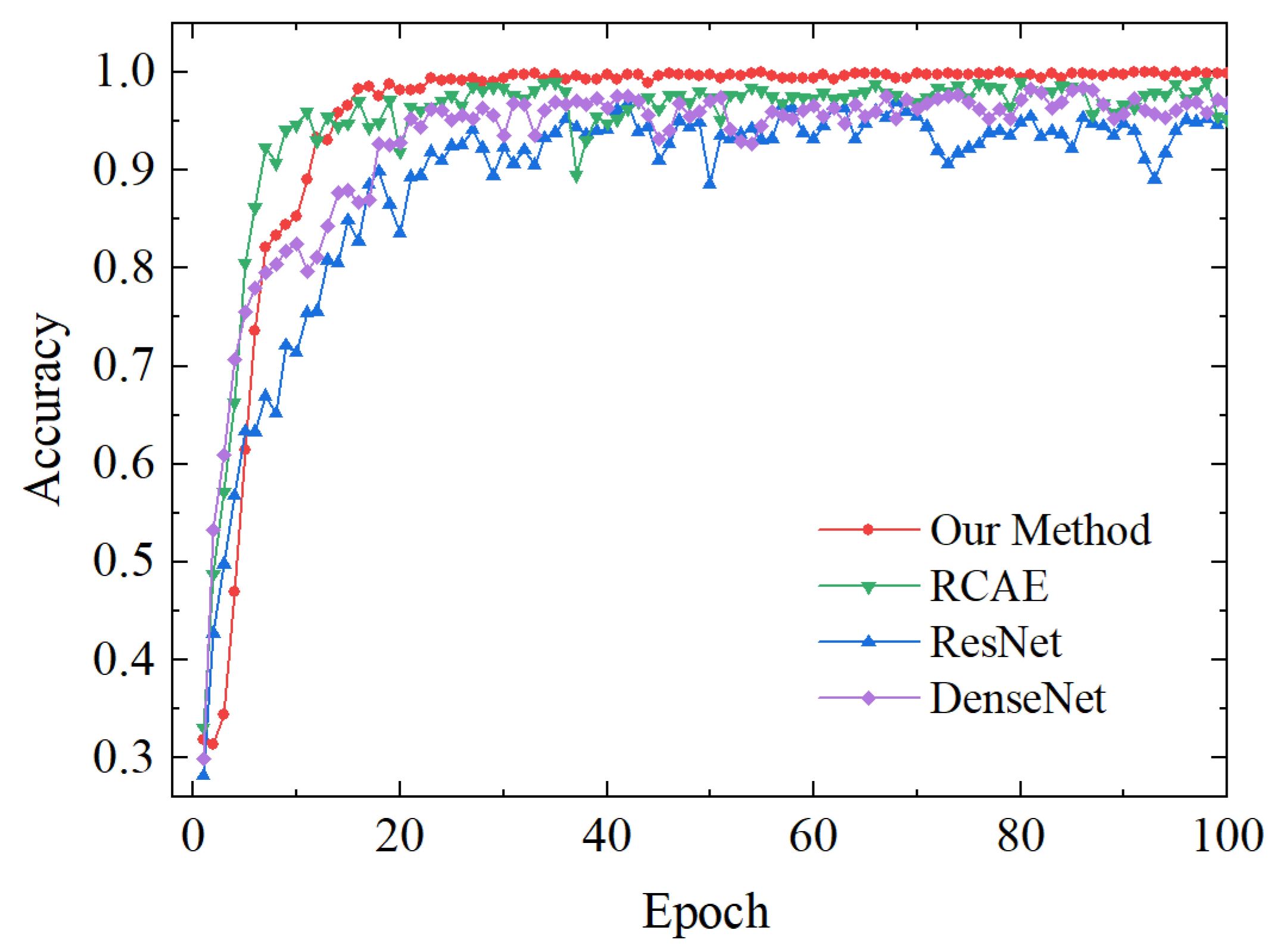
The EFENet network effectively proposes fault characteristics of rolling bearings from acoustic array signals. Furthermore, this method exhibits fast convergence speed and maintains a test set accuracy of 98%.
- (2)
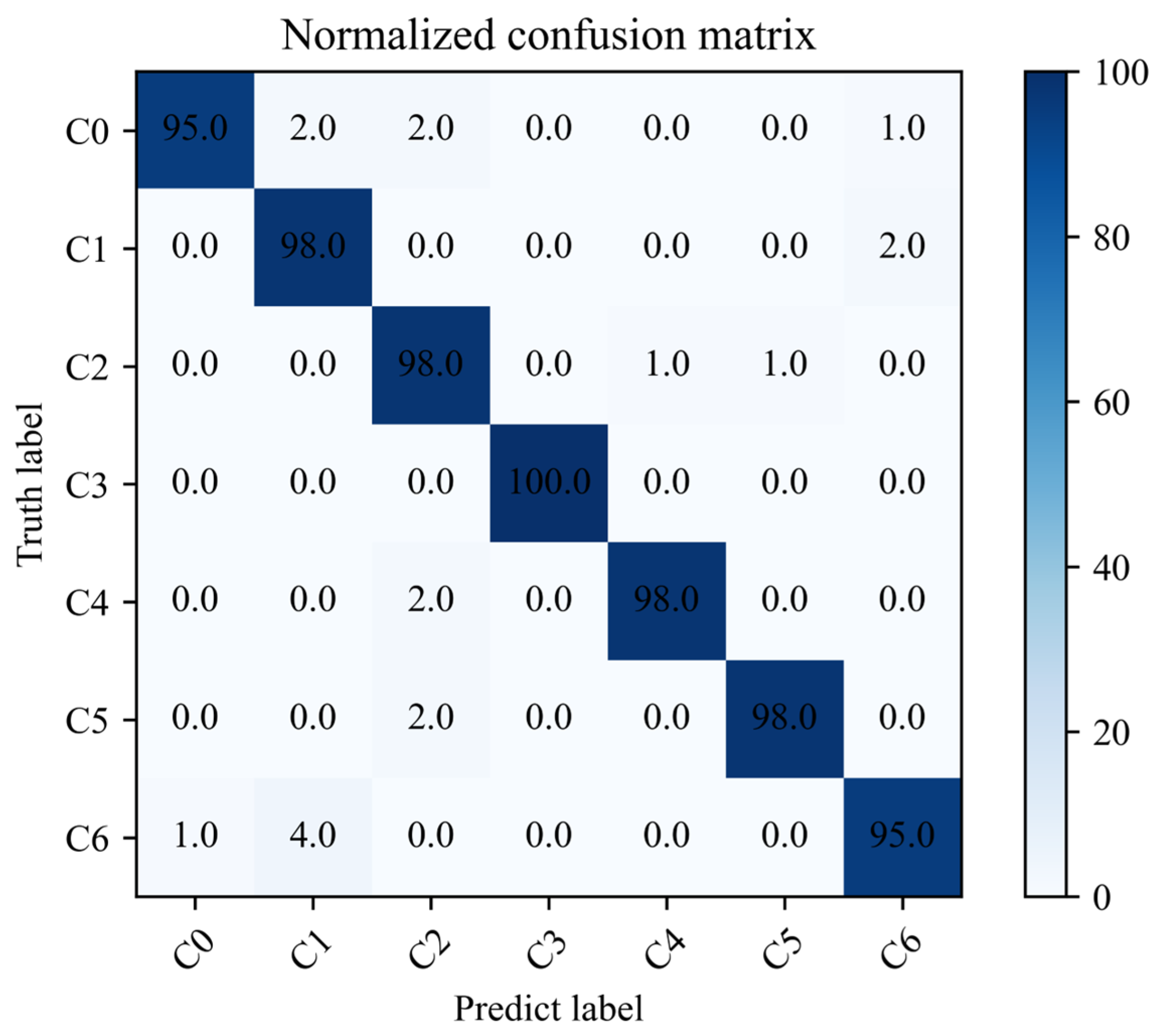
Compared with RCAE, CNN, SAE, DenseNet, and ResNet, it can be observed that the fault classification accuracy of the EFENet network reaches as high as 98.52%, which is 7% higher than CNN and 4% higher than ResNet. The proposed method in this paper achieves superior fault diagnosis performance. It further demonstrates that the information feature selection module and channel attention mechanism module proposed in this study effectively extract bearing fault feature information from acoustic array signals.
- (3)
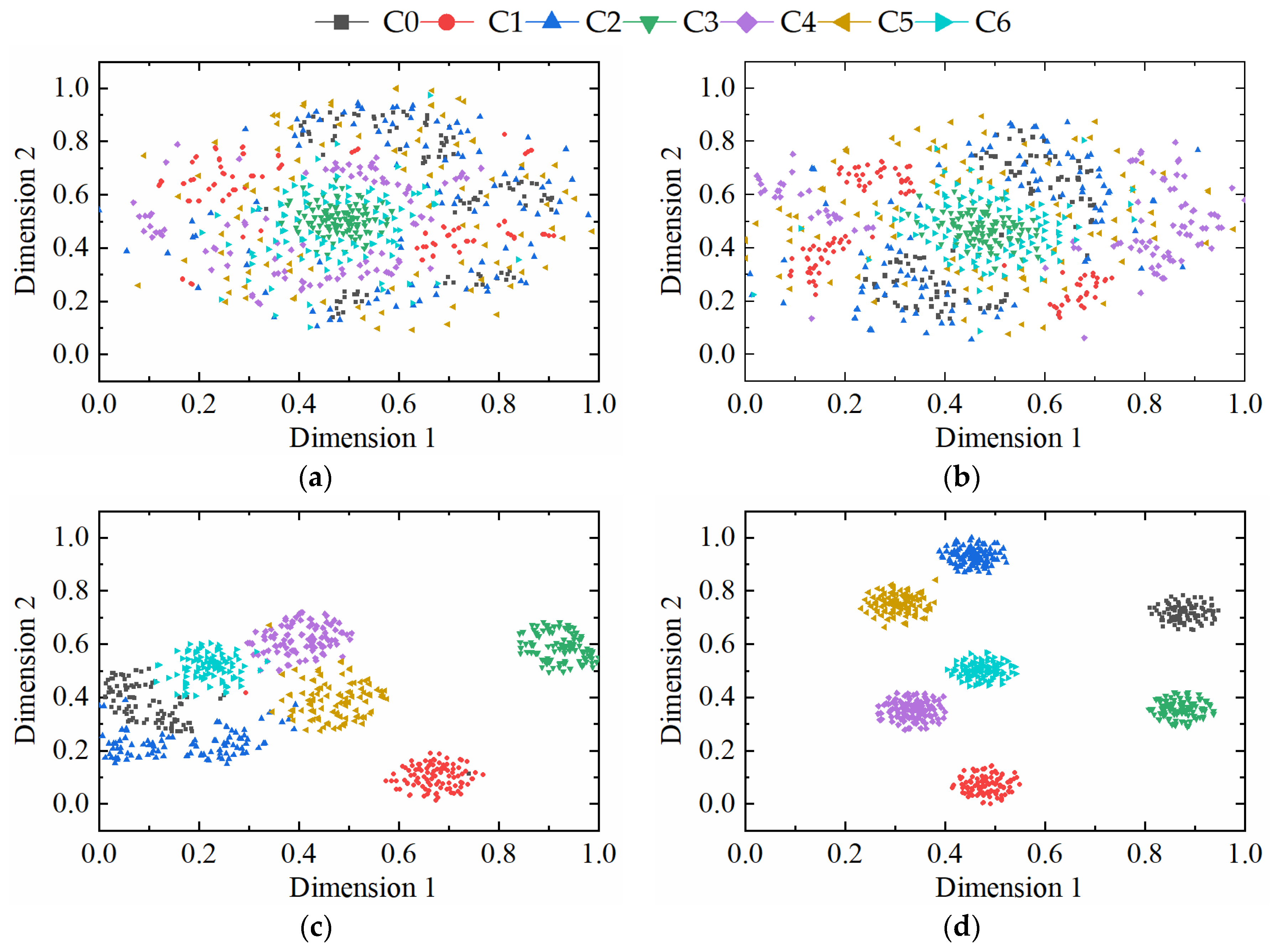
During the antinoise experiment process, t-SNE results of the EFENet network exhibited clear boundaries and significant spacing between classes. This indicates that EFENet accuracy and stability hold even under noisy background conditions. The algorithm proposed in this paper holds certain engineering application value for rolling bearing fault diagnosis.
The method proposed in this paper offers the advantages of convenient sensor installation, high algorithm accuracy, and fast calculation speed. It holds significant practical value for engineering applications. Aiming at the computational efficiency and overfitting problems of the model, we will take into consideration novel models for lightweight pretrained deep learning models in future endeavors. The future research endeavors of our team will focus on the development and refinement of fault life prediction methods for rolling bearings, specifically utilizing acoustic radiation signals.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}