Abstract
This paper proposes an adaptive distributed hybrid control approach to investigate the output containment tracking problem of heterogeneous wide-area networks with intermittent communication. First, a clustered network is modeled for a wide-area scenario. An aperiodic intermittent communication mechanism is exerted on the clusters such that clusters only communicate through leaders. Second, in order to remove the assumption that each follower must know the system matrix of the leaders and achieve output containment, a distributed adaptive hybrid control strategy is proposed for each agent under the internal model and adaptive estimation mechanism. Third, sufficient conditions based on average dwell-time are provided for the output containment achievement using a Lyapunov function method, from which the exponential stability of the closed-loop system is analyzed. Finally, simulation results are presented to demonstrate the effectiveness of the proposed adaptive distributed intermittent control strategy.
1. Introduction
Multi-agent systems in distributed cooperative settings have been a research focus because of their widespread applications, including spacecraft formation flying [], mobile robots [], and sensor networks []. An increasing number of studies consider various cooperative control problems under two types of network frameworks: leaderless and leader-following [,]. In the leader-following framework involving consensus with only one leader, a set of agents must reach the tracking trajectory of interest. In some real-world scenarios, agents are not forced to reach the same value or trajectory. As a special class of cooperative controls, containment control aims to drive all followers into a desirable region formed by multiple independent leaders []. In general, multi-agent systems can be divided into two broad classes according to their dynamics: homogeneous and heterogeneous [,]. Homogeneity signifies that the dynamics of the agents are identical, whereas heterogeneity signifies nonidentical dynamics, which makes the containment problem more challenging but practical and prospective.
Recently, output containment control (OCC) has attracted considerable attention for heterogeneous multi-agent systems with state variables of different dimensions. Using the internal model principle, OCC of heterogeneous multi-agent systems was studied under both state and output feedback designs in []. OCC of heterogeneous multi-agent systems was investigated using an output regulation technique by designing an optimally distributed PID-like controller in []. Specific limitations or task requirements, such as transmission delays [], fixed-time [], and input saturation [], have been reported for OCC of heterogeneous multi-agent systems in recent literature. For more complex environments or certain specific task scenarios, bipartite formation-containment was studied for heterogeneous multi-agent systems in []. In [], formation-containment control was investigated for heterogeneous linear multi-agent systems with unbounded transmission delays. In general, by applying the output regulation technique, a distributed observer or internal model is introduced to estimate the leader’s signal for each heterogeneous follower. Thus, the abovementioned studies generally require each follower to know the matrix S of the leader system [,,,,,], which may be unrealistic in some situations. In case of the unknown system matrix, some effective adaptive control methods, such as the leaning algorithms [,] and the adaptive estimation [,,], have recently been developed. In [], an adaptive approach was proposed to estimate the system matrix for each follower using a distributed adaptive estimation technique. In the case with multiple leaders, an adaptive distributed observer was designed to achieve the OCC of a multi-agent system in [], in which only the system matrix S was estimated. To know the system matrices of the leaders, a novel adaptive OCC was studied under both state-feedback and dynamic output-feedback in []. However, few studies have considered the OCC of heterogeneous multi-agent systems over clustered networks. Thus, in this study, we investigate the adaptive OCC problem over clustered networks, particularly over more complex wide-area networks.
In general, complex networks in real-world applications may comprise several smaller subnetworks, such as the post-disaster emergency communication networks in []. Therefore, the investigation of the synchronization of wide-area networks is important. Intuitively, wide-area networks exhibit more complex phenomena than a simple network pattern due to task requirements or wide-area scenarios. Consequently, increasing attention has recently been paid to various control problems. A consensus control problem was investigated for clustered networks with impulsive communication in []. Furthermore, a static output feedback control was considered in [] to achieve consensus. In [], output consensus of clustered networks was achieved using a reduced-order observer. Subsequently, the work was extended to heterogeneous clustered networks to achieve output consensus in []. In the case of inter-cluster intermittent communication, an intermittent output tracking control was proposed for heterogeneous multi-agent systems over clustered networks in []. However, few studies have focused on clustered networks with multiple leaders, which inspired us to address the OCC problem for clustered networks.
Due to limited resources, physical device failures, and communication barriers, distributed intermittent control is desired owing to its effective and economical communication mode. Periodic [,,] and aperiodic [,,] intermittent control have been reported for multi-agent systems. To achieve containment in the case of periodic intermittent communication, intermittent containment control was investigated for second-order multi-agent systems in []. In [], periodic intermittent containment control was explored for nonlinear multi-agent systems subjected to unknown disturbances. This control strategy was also extended to heterogeneous multi-agent systems in []. In contrast to periodic intermittent control, aperiodic intermittent control, which consists of aperiodic time intervals, is more realistic. For example, the wind power in [] suffered from unstable wind speed. Considering time-delay and aperiodic intermittent communication, second-order multi-agent systems were exponentially stabilized utilizing a distributed aperiodic intermittent control strategy in []. In [], a novel distributed aperiodic intermittent communication scheme was proposed for linear multi-agent systems with disturbances. By introducing time-scale theory, aperiodic intermittent containment control was investigated for a heterogeneous multi-agent system in []. However, the sum of the communication and non-communication lengths is required for the exponential stability in the abovementioned aperiodic intermittent control methods. To relax this strict constraint, a simple but practical condition is desired for distributed aperiodic intermittent controls.
Motivated by the above discussion, in this study, we propose a distributed aperiodic intermittent control approach to solve the output containment problem for a heterogeneous multi-agent system, without expecting all followers to know the system matrix S of the leader. To this end, a distributed adaptive observer is used to estimate the matrix S. Based on this, an adaptive distributed hybrid controller is designed using a dynamic compensator. Using a Lyapunov function method and the output regulation technique, sufficient conditions for the adaptive intermittent OCC are derived. The main contributions of this paper are as follows:
- A distributed adaptive approach is designed for the internal leaders to estimate the system matrix S of the homogeneous exogenous leaders. Compared with [,,], this approach is more practical and extends to a wide-area network.
- Distributed hybrid controllers are designed separately for the internal leaders and followers to achieve output containment tracking. Specifically, the distributed aperiodic intermittent controller is designed for the internal leader, whereas the continuous dynamic feedback controller is designed for the follower based on the internal model.
- Sufficient conditions for the exponential stability of the closed-loop system are derived, where intermittent control rate and control parameters are calculated based on the average dwell-time and regulator equations.
The remainder of this paper is organized as follows. Section 2 presents essential preliminaries and formulates the problem statement and framework. The main results of the developed hybrid control algorithms and theories are presented in Section 3. Simulation examples are provided in Section 4. Finally, conclusions are presented in Section 5.
2. Preliminaries and Problem Formulation
In this section, we first introduce the basics of directed graph topology and the study problem based on a clustered hybrid communication network.
2.1. Notations
denotes the set of real matrices. and denote the column vector with n elements as 1 and the dimensional identity matrix, respectively. ⊗ is the Kronecker product. denotes a positive (negative) definite matrix. The induced 2-norm of the matrix or Euclidean vector norm is denoted as . Let and be the maximum and minimum eigenvalues, respectively. and denote the largest lower and smallest upper bounds of the set , respectively. denote a block-diagonal matrix with arbitrary matrices . For any column vector with any vector , we define . denotes the Euclidean distance from to a set .
Definition 1.
Define . For any and any , the set is convex if . A convex hull, denoted as , is the minimal convex set containing all points in , that is, .
2.2. Communication Network Modeling
A directed graph is typically used to describe the communication network for a group of autonomous agents, where the node set denotes the set of N agents. The edge set denotes the set of communication links between agents. A directed edge implies that agent can receive information from neighboring agent . Meanwhile, if , the weight is defined as ; otherwise, . Thus, is the adjacency matrix associated with the directed graph . Additionally, the Laplacian matrix of the graph is defined as , where and .
Regarding multi-area scenarios, the communication network is spilt into M subnetworks described as , which are called clusters in sequence. It is assumed that each subnetwork has a spanning tree with followers and an internal leader indexed as as its root. Thus, N followers belong to the sets with . The clusters satisfy the following properties: , , and . In addition, for each cluster , we define a Laplacian matrix and a leader adjacency matrix , where if , and if . Thus, the global interaction of all agents in is denoted as .
As mentioned above, because communication among clusters is only implemented by M internal leaders, let be a directed graph to describe the communication network associated with the above leaders, which are indexed as . Similarly, is obtained for leaders. The objective of this paper is to drive the internal leaders to move into a desired region spanned by exogenous leaders, which are indexed as . Thus, the interaction relationships of these agents can be modeled using a directed graph . We define the adjacency matrix for each leader as , where , if the leader is connected to the exogenous leader ; otherwise, . Combining and , we can define . The necessary assumptions regarding the above descriptions are introduced below.
Assumption 1.
There exists at least one directed path from the internal leader to followers in the same cluster.
Figure 1 illustrates the connectivity of the communication network associated with the followers , internal leaders , and exogenous leaders .
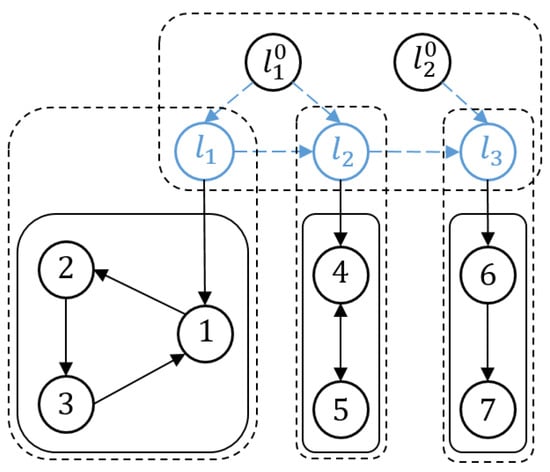
Figure 1.
Wide-area network framework with hybrid communication.
Lemma 1
([]). Under Assumption 1, the matrix is invertible. A square matrix A is stochastic if all of its entries are non-negative and the entries of each row add up to 1.
Lemma 2
([]). Under Assumption 1, for M-matrix , there exists a matrix with positive scalar satisfying , such that . Similar to , a corresponding exists for each , satisfying .
2.3. Problem Statement
Consider a general wide-area communication network, where there are N heterogeneous followers and exogenous leaders with the following dynamics.
and
where , , and are the state, control input, and output of the ith follower, respectively. Similarly, the state, input, and output of the th leader are denoted as , , and , respectively. The constant real matrices , , , , and .
Motivated by [], the system matrix S of exogenous leaders may be unknown to other agents. By introducing an internal model and adaptive control method, the dynamics of internal leaders are modeled as
where , , , and denote the state, input, output, and the estimation of S, respectively. In addition, the following assumptions are necessary.
Assumption 2.
The pairs and are stabilizable and detectable, respectively.
Assumption 3.
The real parts of all eigenvalues of S are positive.
Assumption 4.
There exist the following matrix equations with corresponding solution pairs .
For the case with multiple leaders in this study, we investigate the output containment problem of multi-area networks, which can be described in detail as follows.
Definition 2.
3. Main Results
In this section, by proposing an adaptive distributed intermittent control strategy, sufficient conditions for output containment are derived using the output feedback.
3.1. Distributed Hybrid Adaptive Control Strategy
An aperiodic intermittent control mechanism is introduced because of the inevitable intermittent communication. Based on a non-periodic time sequence, the framework of aperiodic intermittent communication is intuitively developed and illustrated in Figure 2.
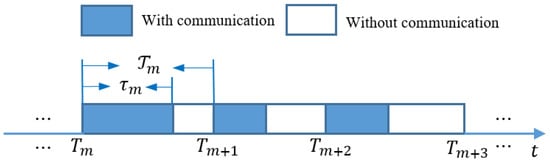
Figure 2.
Aperiodically intermittent communication structure.
In this framework, it is clearly shown that such that the aperiodic time sequence can be denoted as . There exists an aperiodic time interval in the non-periodic period satisfying . This implies that each aperiodic intermittent period is composed of two parts: and . In general, the time widths, with communication and without communication, are also referred to as the work and rest time intervals, respectively. In addition, continuous communication is considered in each cluster . By introducing this aperiodic intermittent control method, the global heterogeneous clustered network can be described as follows:
Assumption 5.
Based on the aperiodic intermittent control mechanism, there exist scalars , , and such that the following average intermittent intervals are defined as follows:
Remark 1.
According to the abovementioned description of aperiodic intermittent communication, the average time intervals , , and h can be observed and defined based on the time-scale theory. Each communication period comprises a pair of work and rest time intervals, which implies that over the time sequence , and is obtained for the aperiodic intermittent communication. Under Assumption 5, a novel criterion for intermittent control can be derived, in which the intermittent rate is related to the defined average time intervals. Additionally, in Assumption 1, the leader is the root of the spanning tree, which ensures that the Laplacian matrix has no eigenvalues with negative real-parts for each clustered network . Assumption 2 is used to guarantee the existence of the gain matrices such that the closed-loop system is stable and the observer is convergent. Under Assumption 3, the exogenous signals can be unbounded, which is more challenging than the cases when the matrix S has zero eigenvalues or eigenvalues with negative real-parts. Assumption 4 is the standard condition for the solvability of the linear output regulation problems.
To achieve containment tracking over the clustered network, we design a distributed hybrid control for the heterogeneous multi-agent system. Specifically, a distributed intermittent controller is proposed for the internal leader as follows:
where the control gain d is an arbitrary positive constant.
To estimate the system matrix S of the exogenous leader, we design distributed adaptive estimation laws for the internal leaders and followers as follows:
where and denote the estimation of the system matrix S, and are positive constants.
By introducing the compensator technique, an adaptive distributed hybrid controller with output feedback design for each heterogeneous follower takes the following form:
where denotes the estimation of , represents the state of the ith internal model, , , and are the control gains.
3.2. Error System Modeling
To analyze the convergence of the adaptive estimation laws (7), two error variables are defined as follows:
Furthermore, for , we define and . Define and . From (7), it follows that
To estimate the states of the leaders, a second form of the error variables is defined as follows:
Regarding the leader-following tracking, we define the following error for each internal leader:
Moreover, we define , , and . Next, we rewrite as . Given , we obtain
3.3. Output Containment Analysis
Lemma 3.
Proof.
According to Lemma 1, is a non-negative M-matrix, which implies that all eigenvalues of have positive real parts. Let , then it follows from (10) that . That is,
As , this implies that . Then, the error . □
Similarly, within each cluster from (10), by denoting and , we obtain . That is, with . Thus, we obtain
From (16) and (17), for , we conclude that and as . That is, and are derived. Thus, the system matrix S can be estimated by all other agents using the proposed adaptive algorithm.
To achieve output containment, a feedforward control strategy is utilized as shown in (7), in which the control gain is determined under the solution of regulator Equation (4). Because all followers do not know S, their estimate is used to calculate the solution of (4) based on an adaptive control approach. Thus, using Lemma 1 in [], the following lemma is derived.
Lemma 4.
Remark 2.
In this paper, we extend the adaptive algorithm from the output regulation problem in [] to the output containment problem over an intermittent communication network. Using Lemma 3, we achieve exponentially. This implies that the proposed adaptive observer can estimate S. Furthermore, using Lemma 4, it is easy to deduce that there exists a pair , such that . Meanwhile, the control gain can be calculated based on the adaptive control method and regulator Equation (4). In this paper, we considered the adaptive containment tracking problem for heterogeneous multi-agent systems. Since the leaders’ dynamics can only be known to the neighboring agents, an adaptive algorithm has to be proposed to estimate the unknown system information for the other agents. It should be noted that the online reinforcement learning approach (or adaptive dynamic programming) [] or policy iteration approach [] were proposed to solve the optimal control of multi-agent systems with completely unknown system information. The optimal containment control of multi-agent systems with wide-area networks will be our future work.
Considering the underlying graph with intermittent communication, sufficient conditions for the exponential stability of the switched system (14) are obtained using an aperiodic intermittent control method.
Theorem 1.
Suppose that Assumptions 1, 3, and 5 are satisfied. Given the switched error system (14), is achieved exponentially if the following conditions are satisfied:
(1) Given the appropriate matrices and , there exist scalars , , , , and , such that
(2) Given the appropriate scalars and , then the aperiodic intermittent rates and .
Proof
See Appendix A. □
Remark 3.
Unlike [,,], herein, Assumption 5 is applied for the aperiodic intermittent control mechanism. Therefore, the switched system (14) can be exponentially stabilized if (20) is feasible. In addition, the exponential convergence index is determined under the two appropriate intermittent rates derived from the inequality (A18). The stability of switched systems (14) not only relies on the control gain d, but also satisfies the intermittent rate under Assumption 5. Moreover, implies that .
Remark 4.
Compared with the results in [,,,], herein, a novel stability criterion is derived for the aperiodic intermittent containment control, in which the two derived intermittent rates consist only of the average time intervals and , and scalars α, β, and σ. Based on the developed intermittent rates, the final exponential convergence index is determined directly by comparison with []. Unlike [], in this study, the current time sequence value m is removed from the obtained intermittent rates. The proposed aperiodic intermittent control method can be applied to various systems.
Sufficient conditions for intermittent OCC under adaptive and intermittent control methods are then presented.
Theorem 2.
Under Assumptions 1–5, considering the heterogeneous multi-agent system (1)–(3), leader-following output consensus is achieved within each cluster under the following conditions:
(1) Given appropriate scalars , , , , and , the following inequality holds:
(2) Given and are Hurwitz matrices, let with the solution .
Proof
See Appendix B. □
Remark 5.
Because the states of heterogeneous agents cannot be obtained, an observer approach is utilized to estimate the state information under output feedback. In contrast to [,] with continuous communication, an adaptive distributed intermittent control strategy is proposed to estimate the output information and S of exogenous leaders. Although the proposed strategy is challenging, it is more realistic.
Remark 6.
In [], it is assumed that the exogenous signal is bounded. To relax this constraint, Assumption 3 is applied in this study. Additionally, this assumption is necessary regarding the intermittent control scheme. To exponentially stabilize the switched error system (15), is derived, which implies that exponentially decays to zero.
4. Numerical Examples
In this section, a simulation example is provided to demonstrate the effectiveness of the developed hybrid control methods for output containment. To simplify the description, we consider a complex network with four followers, two internal leaders, and two reference leaders. The intermittent communication network with the followers , internal leaders , and exogenous leaders is shown in Figure 3.
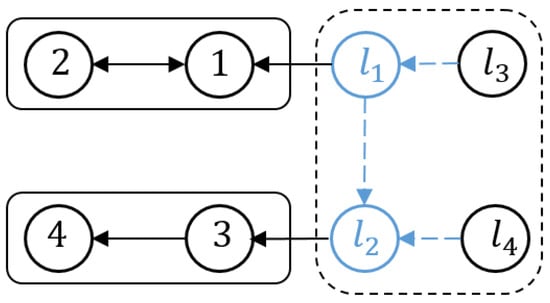
Figure 3.
Heterogeneous intermittent communication network.
The dynamics of the system (1) with four heterogeneous followers are as follows:
Moreover, the system matrices of leaders are given as follows:
Example 1.
Based on Assumption 2, to illustrate the validity of Theorem 1, can be obtained using the adaptive regulator equations. Moreover, and are given as follows:
The gain matrices of the developed observers are given as follows:
We set parameters , , and , and choose the matrix as
From (A19), we set the aperiodic intermittent rate as . Under Assumption 5, two time intervals are described as and . To simplify the analysis, we choose the initial states , , and within the interval . For ease of expression, the aperiodic intermittent control inputs of the internal leaders are expressed as follows:
The characteristic of aperiodic intermittent control input is intuitively reflected in Figure 4 and Figure 5, from which the control input converges to zero based on the developed distributed aperiodic intermittent control approach. That is, the designed intermittent rates under Assumption 5 are effective for aperiodic intermittent control. The state trajectories are displayed in Figure 6, from which and enter the desired set spanned by leaders and . That is, containment tracking is realized by the proposed adaptive distributed aperiodic intermittent control strategy.
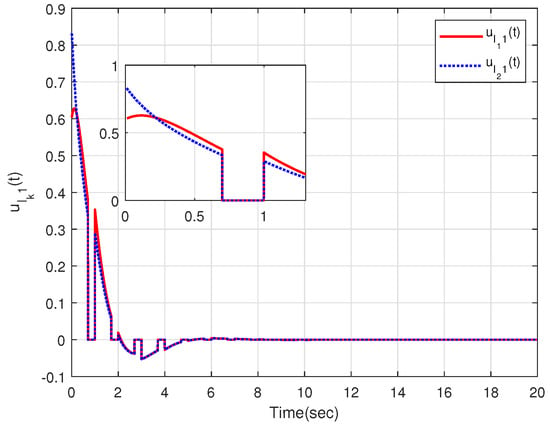
Figure 4.
Intermittent control inputs of the internal leaders.
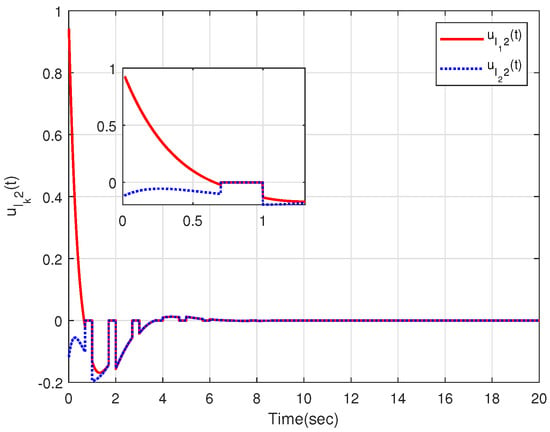
Figure 5.
Intermittent control inputs of the internal leaders.
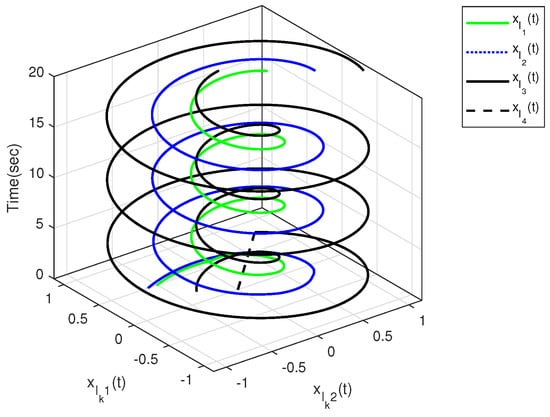
Figure 6.
State trajectories of all leaders.
The effectiveness of Theorem 2 can also be demonstrated in the following example. We set within the interval . By designing an observer-based controller for each heterogeneous agent, Figure 7 and Figure 8 show the state trajectories of errors , from which the proposed observer can successfully estimate and utilize the output information of heterogeneous agents. By defining output errors within each cluster, the evolution of the tracking errors of the followers and the leader within each cluster are shown in Figure 9 and Figure 10. The simulation results show that the follower i can track the leader .
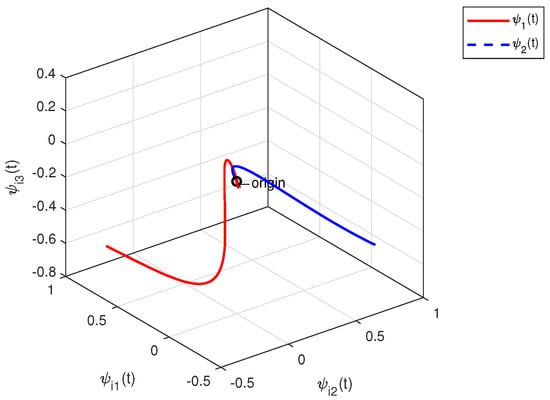
Figure 7.
Observer error trajectories .
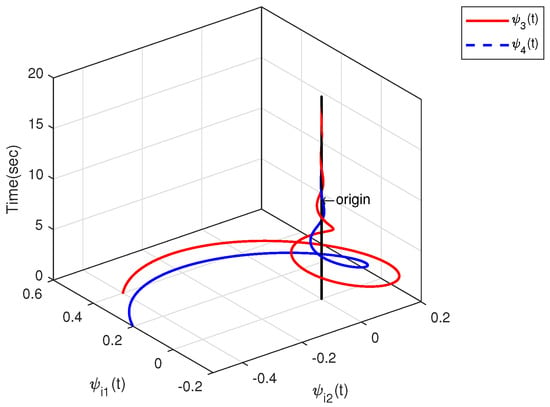
Figure 8.
Observer error trajectories .
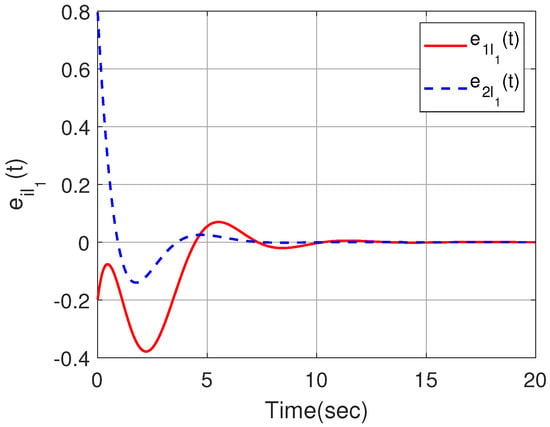
Figure 9.
Output trajectories within the cluster .
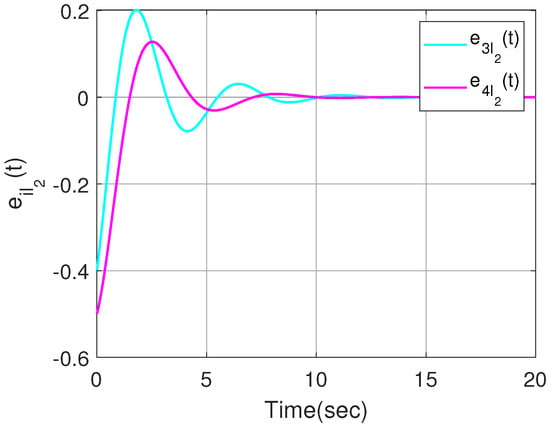
Figure 10.
Output trajectories within the cluster .
In order to make a comparison, we considered the two control strategies in this paper and the reference [], where four followers, two internal leaders and one exogenous leader were considered in the clustered network. Under the distributed hybrid control strategy proposed in [], the output trajectories of all agents were shown in Figure 11, which indicated that all followers can track the output trajectory of the exogenous leader. When an output containment control problem is considered for the multi-agent system in [], by using the distributed adaptive control strategy proposed in this paper, set , Figure 12 shows that the output trajectories of the four heterogeneous followers enter the desired set spanned by two leaders on output. The abovementioned simulation results demonstrate the effectiveness of the developed hybrid control method.
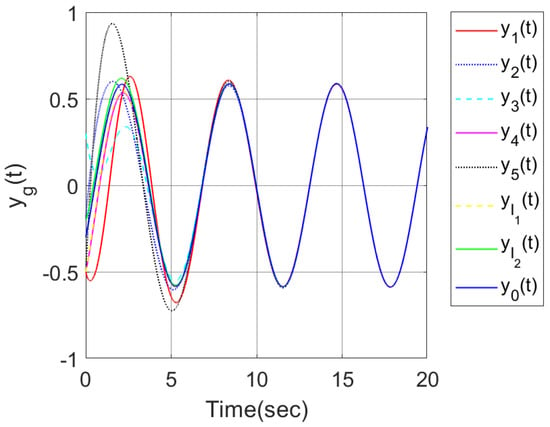
Figure 11.
Output trajectories of all agents.
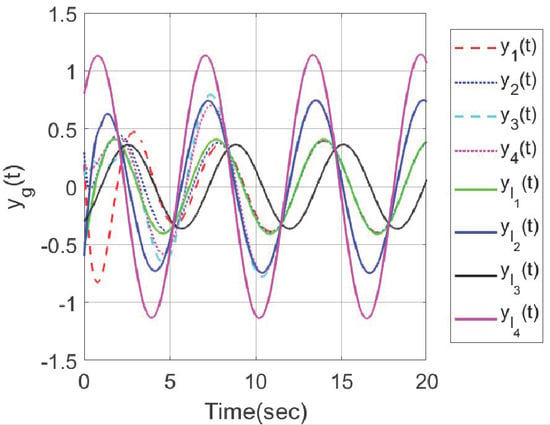
Figure 12.
Output trajectories of all agents.
5. Conclusions
In this study, a heterogeneous clustered network framework with multiple leaders was developed with applications in wide-area scenarios and complex tasks. We investigated the intermittent output containment problem of heterogeneous multi-agent systems. Considering that followers may not know the system matrix S of the reference leader, we designed an adaptive distributed intermittent controller to estimate the matrix S of the leaders. The solution of the regulator equations was obtained using the developed adaptive control algorithm. By introducing the average dwell-time conditions, we applied a common Lyapunov-based function to prove that the developed switched-error system can be exponentially stabilized under aperiodic intermittent control. Linear matrix inequalities were used to compute the controllers, intermittent rates, and other parameters. Simulation examples were presented to verify the effectiveness of the proposed hybrid control strategy. In the future, we will further consider a finite-time containment tracking problem for wide-area networks with cyber-attack and optimal containment control of practical networked systems.
Author Contributions
Conceptualization, J.H. and B.K.G.; investigation, Y.S. and J.H.; methodology, Y.S.; software and simulation, Y.S.; formal analysis, Y.S. and J.H.; writing—original draft preparation, Y.S.; writing—review and editing, J.H. and B.K.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Key Research and Development Program of China under Grant No. 2022YFE0133100, in part by the State Key Program of National Natural Science Foundation of China under Grant No. U21B2008, and in part by the Sichuan Science and Technology Program under Grant 2022YFQ0008.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| OCC | Output containment control |
Appendix A
Proof of Theorem 1.
According to Lemmas 1 and 2, there exists a diagonal matrix and scalar , such that . From (14), we can construct an appropriate Lyapunov function as follows:
where is the solution of (20).
Based on the aperiodic intermittent control, the switched error system (14) can be exponentially stabilized, as shown below.
From (16), this implies that . By denoting , it implies that . From (A2), it can be deduced that with and . Moreover, letting and , we have
From (A3), by denoting , it implies that , from which we can deduce that . Letting , we obtain
Furthermore, it holds that
However, using the developed aperiodic intermittent control approach, the stability of the switched error system (14) must be proven exponentially.
From (A4) and (A7), a form of exponential inequalities is obtained for . Thus, the following derivation process is implemented according to intermittent intervals.
Letting , it follows from (A4) that
From (A4) and (A7), we obtain
Similar to (A9), we have
From (A10) and (A11), we define . Then, according to intermittent intervals, the following derivation processes are derived for and .
, is analyzed as follows.
When , it implies that
Similarly, when , we obtain
Under Assumption 5, for , we can conclude that if . Moreover, and can be derived. Thus, using (A12), we obtain
Similarly, from (A13), we obtain
Next, similar derivations are obtained for . Because , , and , it can be deduced that and . Thus, from (A10), it implies that
Similarly, from (A11), we obtain
The condition implies that . Under Assumption 5, using (A16) and (A17), we deduce
Combining (A14), (A15), and (A18), it follows from (A10) and (A11) that for
where and are inferred according to Assumption 5. Let , and are obtained as . Meanwhile, as , approaches ∞, which implies that . From (A19), with , which implies that and . Then, we say that the developed switched error system (14) is stabilized, which means that the proposed distributed aperiodic intermittent controller (6) can achieve containment tracking.
Considering , we denote the local output error for the th leader as
We define , , and . Subsequently, we can rewrite the error as , which can be translated as follows:
where .
From (A21), as and error approaches zero, we obtain
where and are non-negative according to Lemma 1. This implies that . Moreover, because
the sum of each row of is 1. Furthermore, because , we conclude that . Furthermore, we define . Thus, , whose rows are denoted as . From (A23), this implies that , under which . According to Definitions 1 and 2, M internal leaders can be guided into the convex set formed by leaders on output; that is, output containment is achieved for the leaders. □
Appendix B
Proof of Theorem 2.
First, we must prove that is exponentially stable. From (3), we obtain . Using Lemma 3, it follows from (3) and (15) that
which implies that considering (17). Following Theorem 1, is obtained, which implies that . Furthermore, using Lemma 3, it implies that is bounded and , which further implies that . Thus, we confirm that (15) is stable, which means that the proposed distributed hybrid controller can achieve consensus tracking within each cluster.
Next, output consensus tracking within each cluster must be realized based on the intermittent control and adaptive algorithm.
By introducing the adaptive algorithm, it follows from (8) that
where . From (7) and (8), by denoting , we obtain , implying that by choosing appropriate , which satisfies that is a Hurwitz matrix.
Furthermore, we define . By applying the intermittent control mechanism, the dynamics of can be derived according to the general aperiodic intermittent intervals.
From (4), letting , we obtain
Similarly, when , we obtain
From (A19) and (A24), it implies that and , which further implies that . Using Lemma 3, we obtain . Then, and are obtained using Lemma 4. From (A26)–(A28), we conclude that if is a Hurwitz matrix. Thus, as , the output error is denoted as follows:
Thus, output consensus is achieved within each cluster . From (A19) and (A29), we obtain and . Furthermore, following Definition 2, we infer that
Consequently, leader-following output containment is achieved for the developed clustered network. □
References
- Lv, M.; Ahn, C.K.; Zhang, B.; Fu, A. Fixed-Ttime anti-saturation cooperative control for networked fixed-wing unmanned aerial vehicles considering actuator failures. IEEE Trans. Aerosp. Electron. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Hu, J.; Lennox, B.; Farshad Arvin, B. Robust formation control for networked robotic systems using negative imaginary dynamics. Automatica 2022, 140, 110235. [Google Scholar] [CrossRef]
- Hu, J.; Hu, X.; Shen, T. Cooperative shift estimation of target trajectory using clustered sensors. J. Syst. Sci. Complex. 2014, 27, 413–429. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Finite-time velocity-free rendezvous control of multiple auv systems with intermittent communication. IEEE Trans. Syst. Man Cyber. Sys. 2022, 52, 6618–6629. [Google Scholar] [CrossRef]
- Ma, H.; Yang, C. Exponential synchronization of hyperbolic complex spatio-temporal networks with multi-weights. Mathematics 2022, 10, 2451. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, Q.; Zheng, Y.; Zhu, Y. Containment control of hybrid multi-agent systems. Int. J. Robust Nonlinear Control 2022, 32, 1355–1373. [Google Scholar] [CrossRef]
- Wang, Q.; Hu, J.; Zhao, Y.; Ghosh, B.K. Output synchronization of wide-area multi-agent systems via an event-triggered hybrid control approach. Commun. Nonlinear Sci. Numer. Simul. 2023, 619, 263–275. [Google Scholar] [CrossRef]
- Haghshenas, H.; Badamchizadeh, M.A.; Baradarannia, M. Containment control of heterogeneous linear multi-agent systems. Automatica 2015, 54, 210–216. [Google Scholar] [CrossRef]
- Zuo, S.; Song, Y.; Lewis, F.L.; Davoudi, A. Output containment control of linear heterogeneous multi-agent systems using internal model principle. IEEE Trans. Cybern. 2017, 47, 2099–2109. [Google Scholar] [CrossRef] [PubMed]
- Lui, D.G.; Petrillo, A.; Santini, S. An optimal distributed PID-like control for the output containment and leader-following of heterogeneous high-order multi-agent systems. Inf. Sci. 2020, 541, 166–184. [Google Scholar] [CrossRef]
- Bi, C.; Xu, X.; Liu, L.; Feng, G. Output containment control of heterogeneous linear multiagent systems with unbounded distributed transmission delays. IEEE Trans. Cybern. 2022, 52, 8157–8166. [Google Scholar] [CrossRef] [PubMed]
- Duan, J.; Duan, G.; Cheng, S.; Cao, S.; Wang, G. Fixed-time time-varying output formation-containment control of heterogeneous general multi-agent systems. ISA Trans. 2023, 137, 210–221. [Google Scholar] [CrossRef]
- Sader, M.; Li, W.; Jiang, H.; Chen, L.; Chen, Z. Semi-global bipartite fault-tolerant containment control for heterogeneous multiagent systems with antagonistic communication networks and input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–8. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Gao, Z.; Wang, Y.; Sun, J. Fully distributed event/self-triggered bipartite output formation-containment tracking control for heterogeneous multiagent systems. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 7851–7860. [Google Scholar] [CrossRef]
- Bi, C.; Xu, X.; Liu, L.; Feng, G. Formation-containment tracking for heterogeneous linear multiagent systems under unbounded distributed transmission delays. IEEE Trans. Control Netw. Syst. 2023, 10, 822–833. [Google Scholar] [CrossRef]
- Fang, H.; Zhang, M.; He, S.; Luan, X.; Liu, F.; Ding, Z. Solving the zero-sum control problem for tidal turbine system: An online reinforcement learning approach. IEEE Trans. Cybern. 2022, 1–13. [Google Scholar] [CrossRef]
- He, S.; Fang, H.; Zhang, M.; Liu, F.; Ding, Z. Adaptive optimal control for a class of nonlinear systems: The online policy iteration approach. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 549–558. [Google Scholar] [CrossRef]
- Cai, H.; Lewis, F.L.; Hu, G.; Huang, J. The adaptive distributed observer approach to the cooperative output regulation of linear multi-agent systems. Automatica 2017, 75, 299–305. [Google Scholar] [CrossRef]
- Liang, H.; Zhou, Y.; Ma, H.; Zhou, Q. Adaptive distributed observer approach for cooperative containment control of nonidentical networks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 299–307. [Google Scholar] [CrossRef]
- Zuo, S.; Song, Y.; Lewis, F.A.; Davoudi, A. Adaptive output containment control of heterogeneous multi-agent systems with unknown leaders. Automatica 2018, 92, 235–239. [Google Scholar] [CrossRef]
- Deepak, G.C.; Ladas, A.; Sambo, Y.A.; Pervaiz, H.; Politis, C.; Lmran, M.A. An overview of post-disaster emergency communication systems in the future networks. IEEE Wirel. Commun. 2019, 26, 132–139. [Google Scholar]
- Bragagnolo, M.C.; Morărescu, I.C.; Daafouz, J.; Riedinger, P. Reset strategy for consensus in networks of clusters. Automatica 2016, 65, 53–63. [Google Scholar] [CrossRef]
- Pham, V.T.; Messai, N.; Manamanni, N. Impulsive observer-based control in clustered networks of linear multi-agent systems. IEEE Trans. Netw. Sci. Eng. 2020, 7, 1840–1851. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Y.; Hu, J. Reset output feedback control of cluster linear multi-agent systems. J. Franklin Inst. 2021, 358, 8419–8442. [Google Scholar] [CrossRef]
- Wang, Q.; Hu, J.; Wu, Y.; Zhao, Y. Output synchronization of wide-area heterogeneous multi-agent systems over intermittent clustered networks. Inf. Sci. 2023, 619, 263–275. [Google Scholar] [CrossRef]
- Shi, Y.; Hu, J.; Wu, Y.; Ghosh, B.K. Intermittent output tracking control of heterogeneous multi-agent systems over wide-area clustered communication networks. Nonline Anal. Hybrid Syst. 2023, 50, 101387. [Google Scholar] [CrossRef]
- Wu, Y.; Zhuang, S.; Li, W. Periodically intermittent discrete observation control for synchronization of the general stochastic complex network. Automatica 2019, 110, 108591. [Google Scholar] [CrossRef]
- Chen, H.; Shi, P.; Lim, C.-C. Cluster synchronization for neutral stochastic delay networks via intermittent adaptive control. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3246–3259. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Li, W. Stabilization of highly nonlinear stochastic coupled systems via periodically intermittent control. IEEE Trans. Autom. Control 2021, 66, 4799–4806. [Google Scholar] [CrossRef]
- Cheng, L.; Qiu, J.; Chen, X.; Zhang, A.; Yang, C.; Chen, X. Adaptive aperiodically intermittent control for pinning synchronization of directed dynamical networks. Int. J. Robust Nonlinear Control 2019, 29, 1909–1925. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, M.; Wang, J.L. Stabilization of stochastic highly non-linear multi-links systems via aperiodically intermittent control. Automatica 2022, 42, 110405. [Google Scholar] [CrossRef]
- Yao, Y.; Luo, Y.; Cao, J. Finite-time H∞ cluster consensus control for nonlinear multi-agent systems with aperiodically intermittent control. Commun. Nonlinear Sci. Numer. Simul. 2022, 114, 106677. [Google Scholar] [CrossRef]
- Liu, Y.; Su, H. Containment control of second-order multi-agent systems via intermittent sampled position data communication. Appl. Math. Comput. 2019, 362, 124522. [Google Scholar] [CrossRef]
- Tan, M.; Zhang, X.; Ye, L.; Lin, P. Robust containment control for nonlinear multi-agent systems with intermittent communication. Opt. Control Appl. Methods 2022, 43, 553–565. [Google Scholar] [CrossRef]
- Wang, Y.W.; Liu, X.K.; Xiao, J.W.; Lin, X. Output formation-containment of coupled heterogeneous linear systems under intermittent communication. J. Frankl. Inst. 2017, 354, 392–414. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, J.; Li, W. Intermittent discrete observation control for synchronization of stochastic neural networks. IEEE Trans. Cybern. 2020, 50, 2414–2424. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; Chen, Z. Distributed containment control for second-order multi-agent systems with time delay and intermittent communication. Int. J. Robust Nonlin. Control 2018, 28, 5730–5746. [Google Scholar] [CrossRef]
- Yang, Y.; Modares, H.; Vamvoudakis, K.G.; Yin, Y.; Wunsch, D.C. Dynamic intermittent feedback design for H∞ containment control on a directed graph. IEEE Trans. Cybern. 2020, 50, 3752–3765. [Google Scholar] [CrossRef]
- Xiao, Q.; Lewis, F.L.; Zeng, Z. Containment control for multi-agent systems under two intermittent control schemes. IEEE Trans. Autom. Control 2018, 64, 1236–1243. [Google Scholar] [CrossRef]
- Li, Z.; Wen, G.; Duan, Z.; Ren, W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Trans. Autom. Control 2015, 60, 1152–1157. [Google Scholar] [CrossRef]
- Qian, Y.-Y.; Liu, L.; Feng, G. Cooperative output regulation of linear multiagent systems: An event-triggered adaptive distributed observer approach. IEEE Trans. Autom. Control 2021, 66, 833–840. [Google Scholar] [CrossRef]
- Liu, B.; Yang, M.; Liu, T.; Hill, D.J. Stabilization to exponential input-to-state stability via aperiodic intermittent control. IEEE Trans. Autom. Control 2021, 66, 2913–2919. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).