
Comparison of Imaging Radar Configurations for Roadway Inspection and Characterization



Abstract
:1. Introduction
- FSC TomoSAR is well adapted for characterizing all roadway defects, and outperforms nadir-looking B-scan mode, particularly with improved resolution in the X band.
- The utilization of polarimetric diversity enables the estimation of dielectric permittivity and the compensation of refraction.
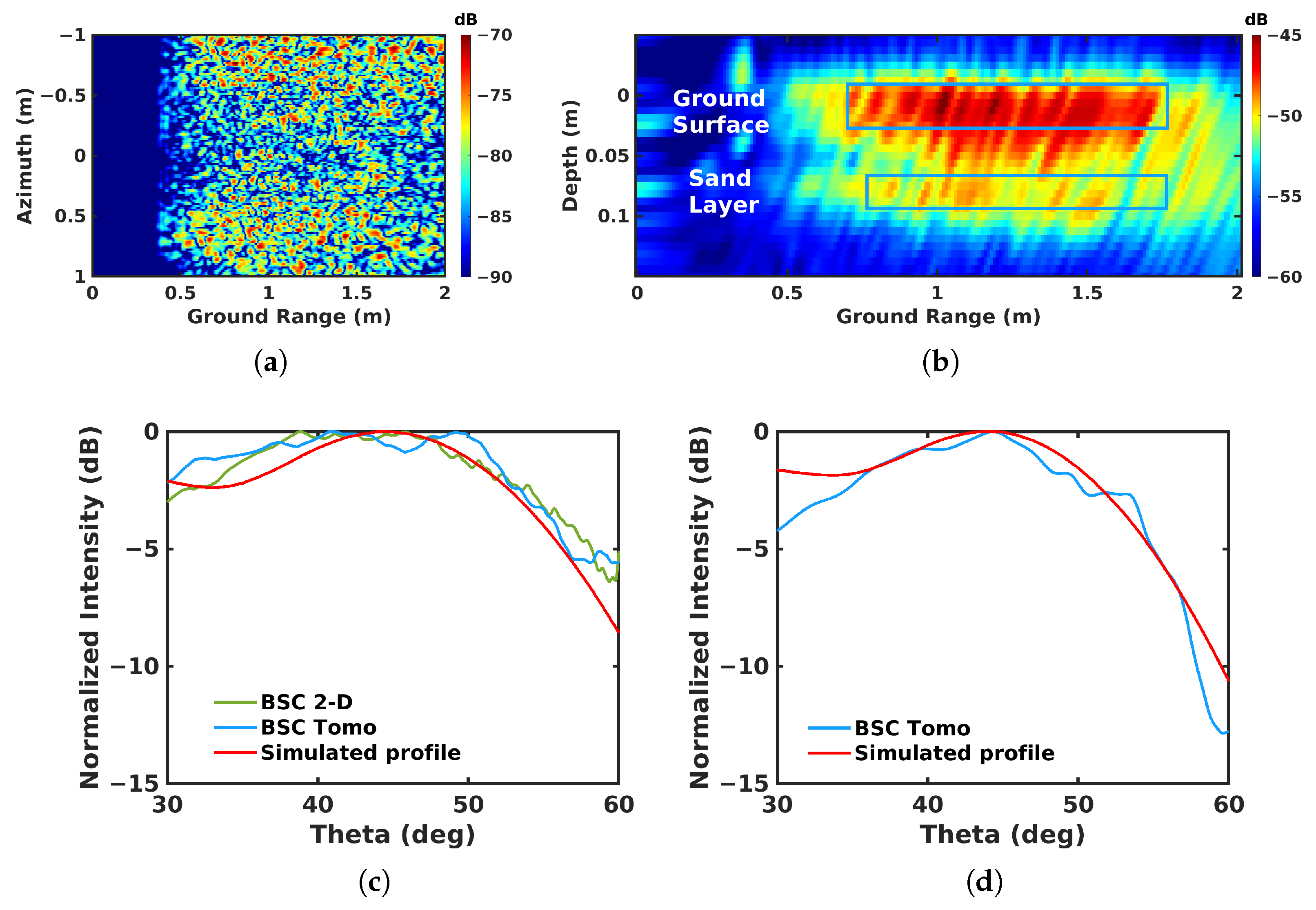
- Roughness is estimated using a scattering model, which benefits from the angular diversity of the side-looking configuration.
2. Investigated Imaging Modes
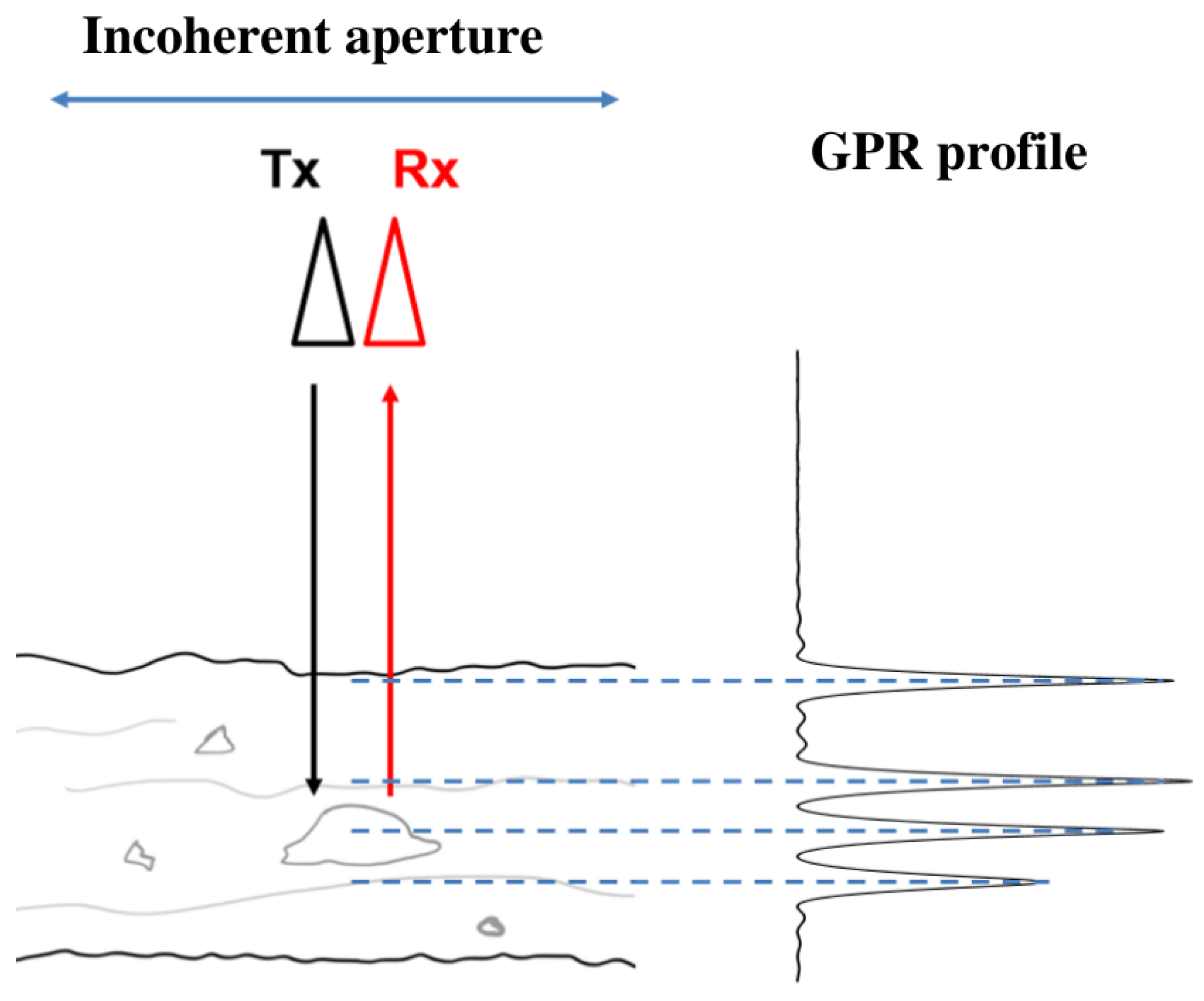
2.1. Nadir-Looking Ground-Penetrating Radar
2.2. Off-Nadir Synthetic Aperture Radar
2.2.1. Single-Channel Monostatic SAR
2.2.2. Single-Channel Bistatic SAR
2.2.3. Tomographic Monostatic SAR
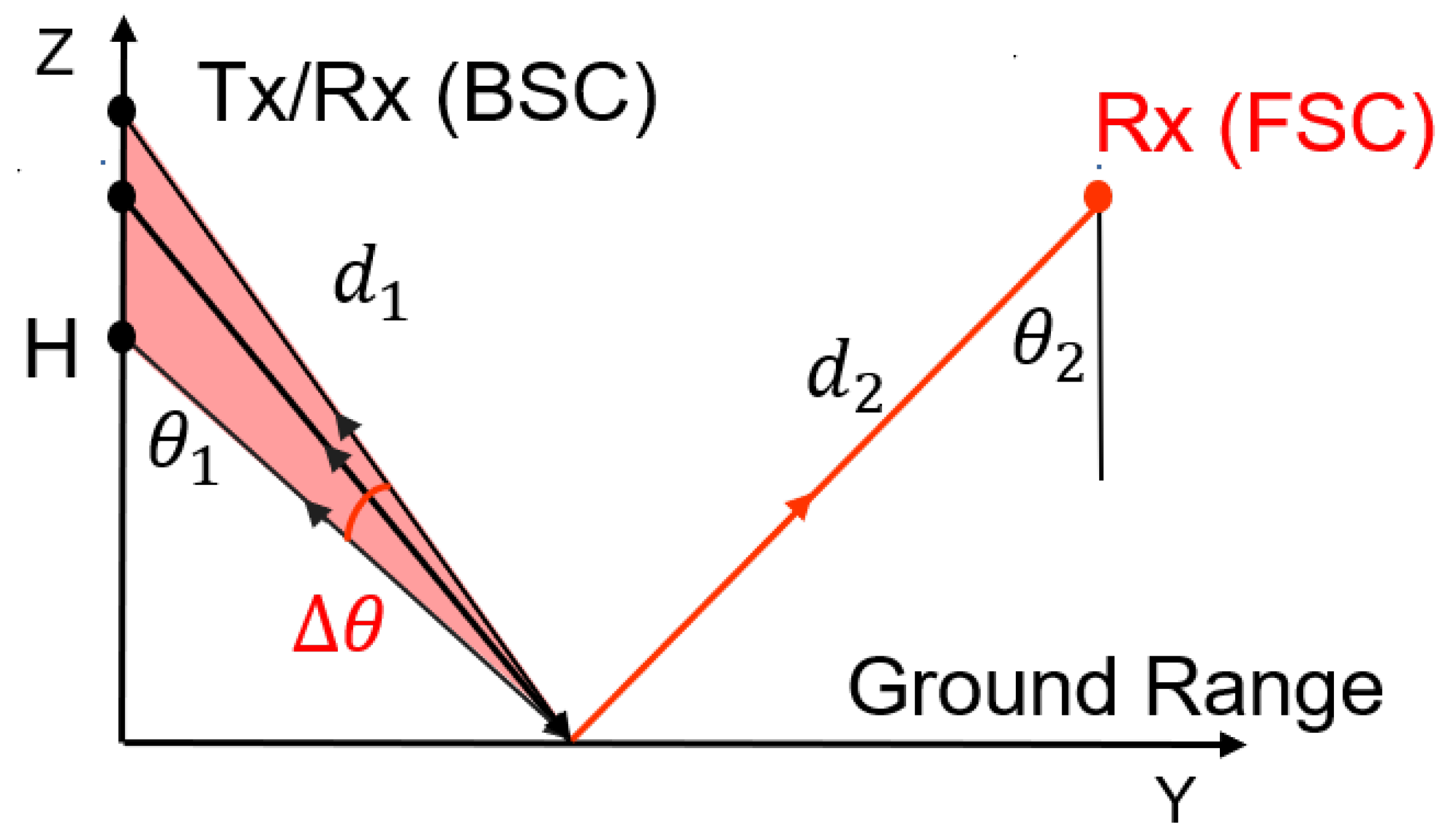
2.2.4. Tomographic Bistatic SAR
3. Experiment Configuration for Roadway Characterization
3.1. Ground-Based SAR System Operated in BSC and FSC Configurations
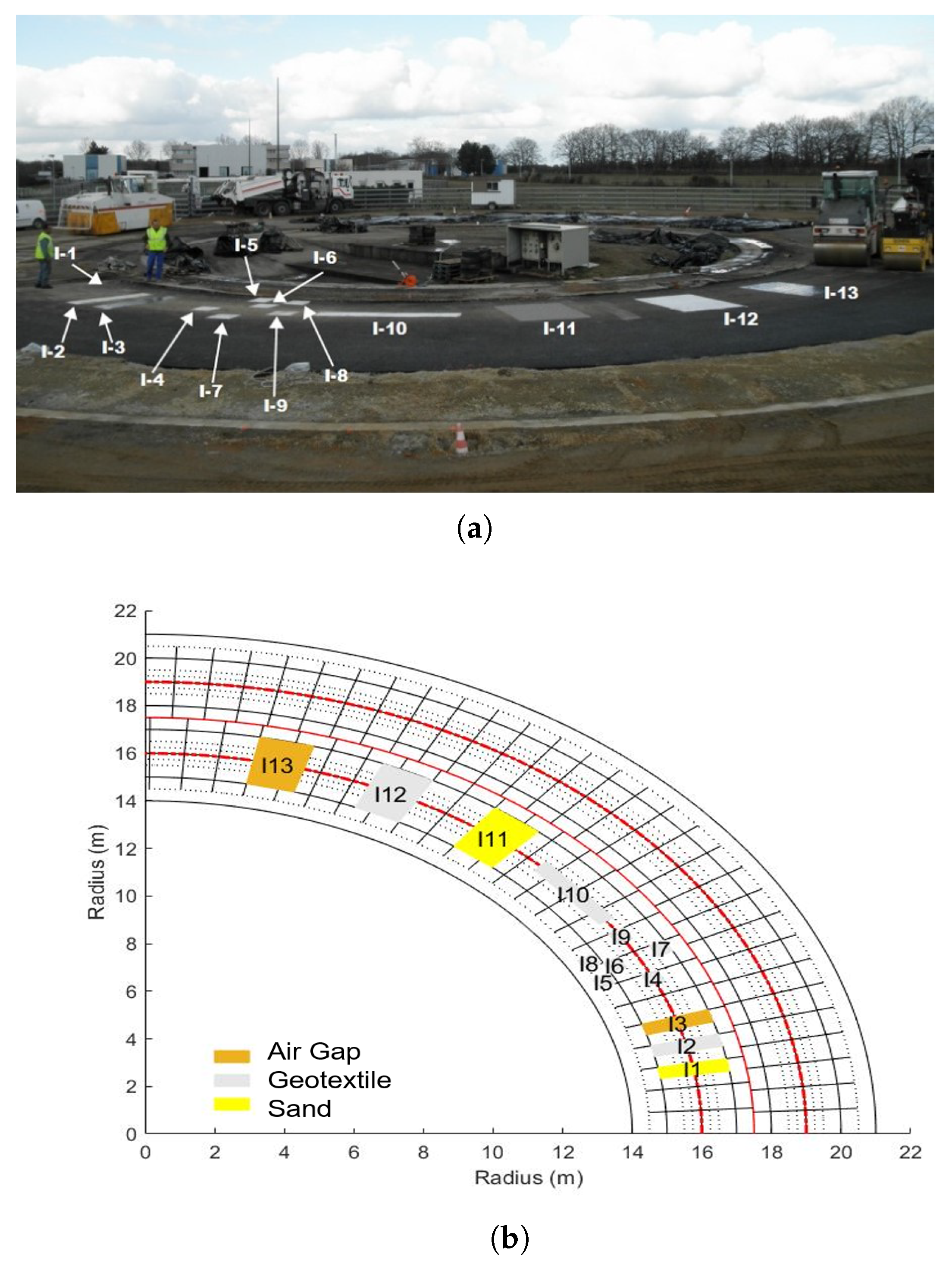
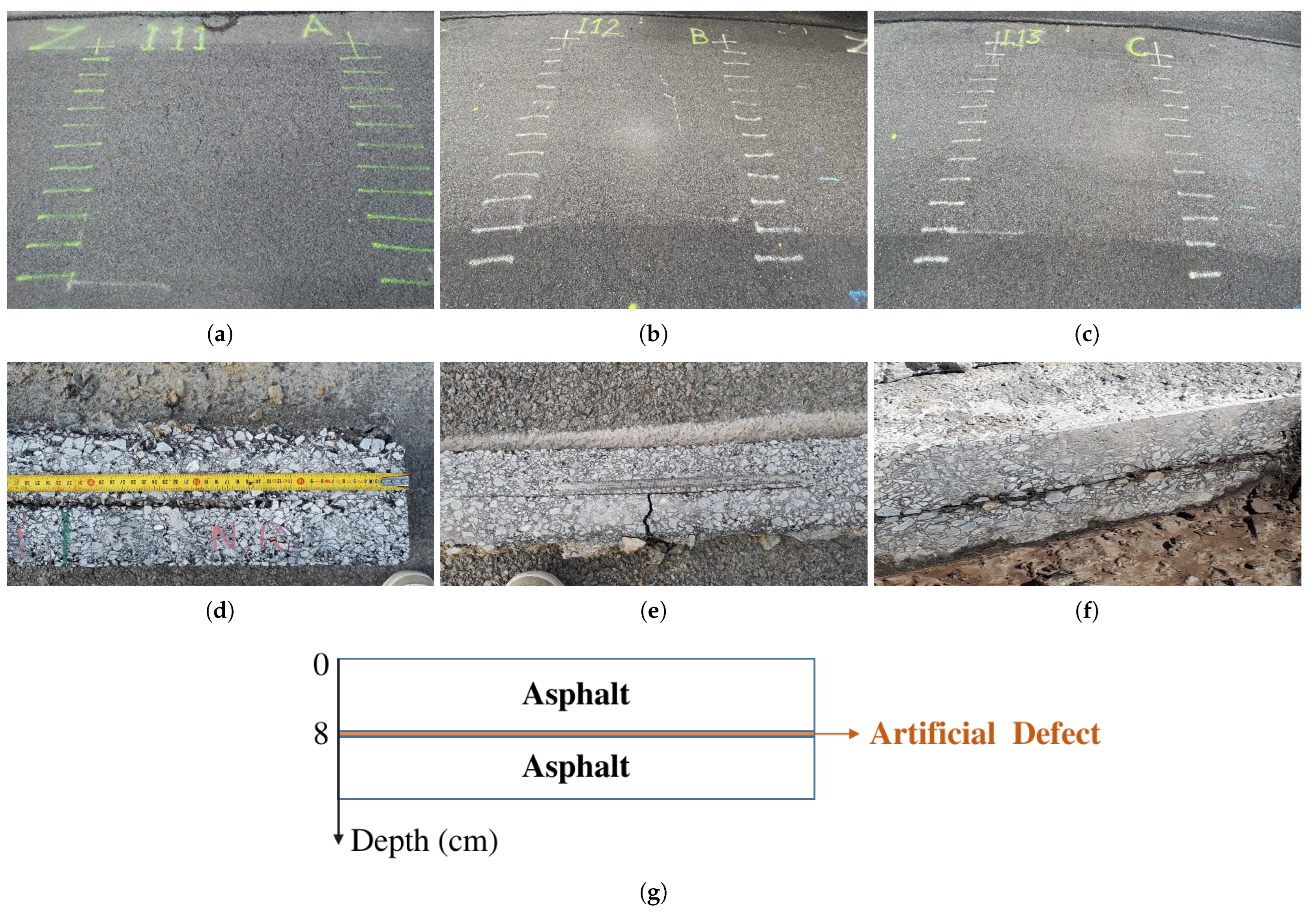
3.2. Experiment Setup and Scene Description
4. Measurement Campaign Results
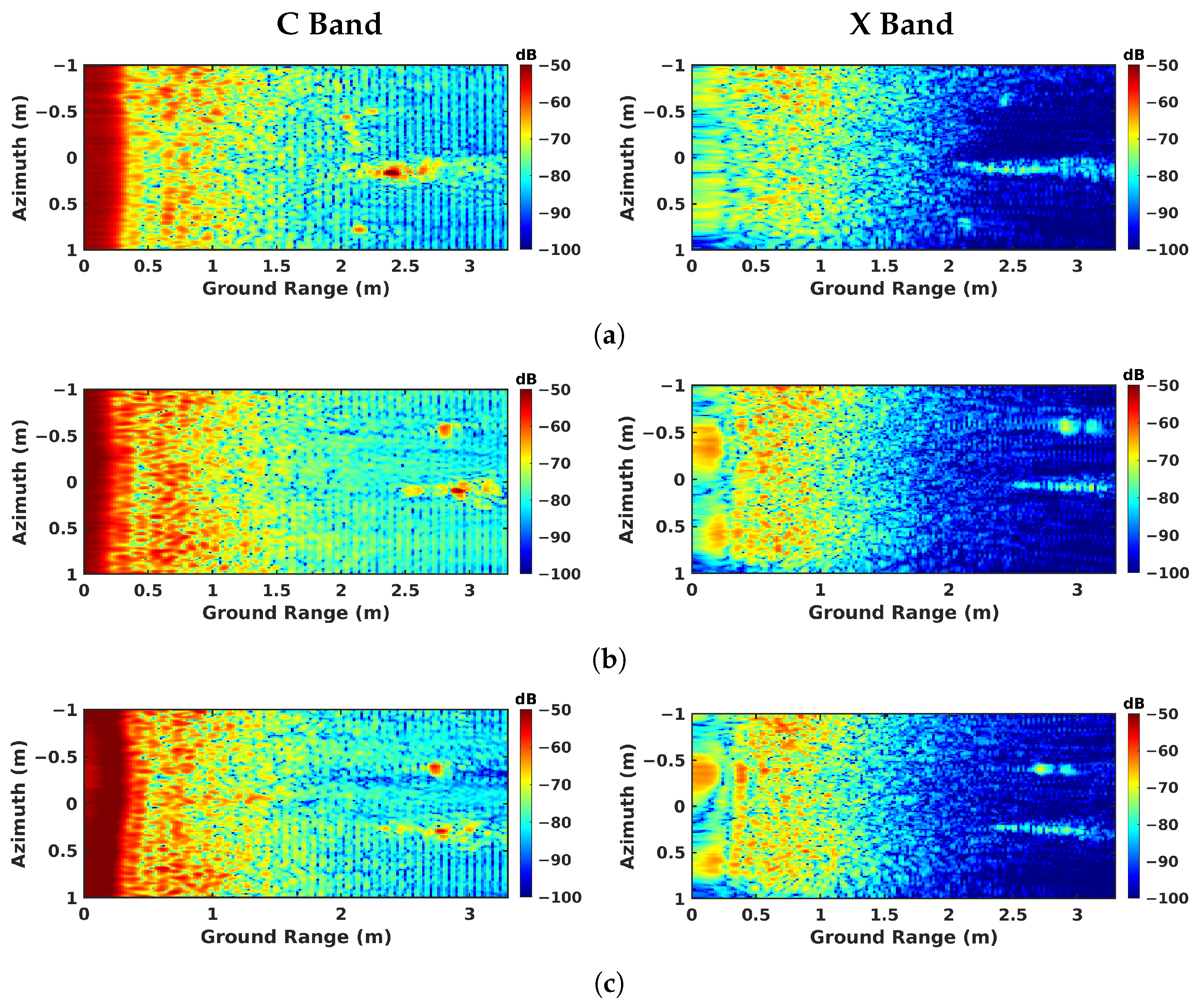
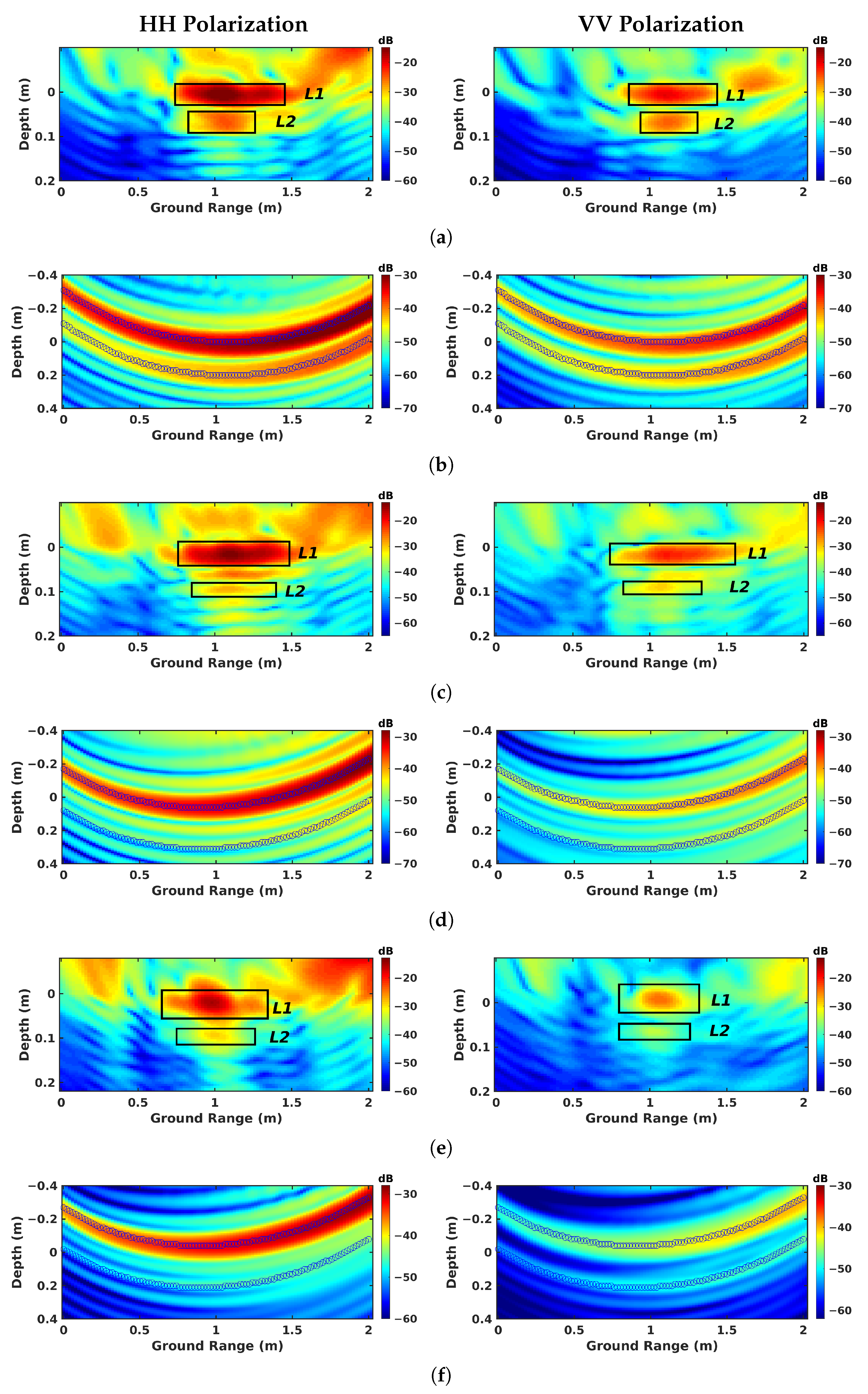
4.1. Comparison of Configurations
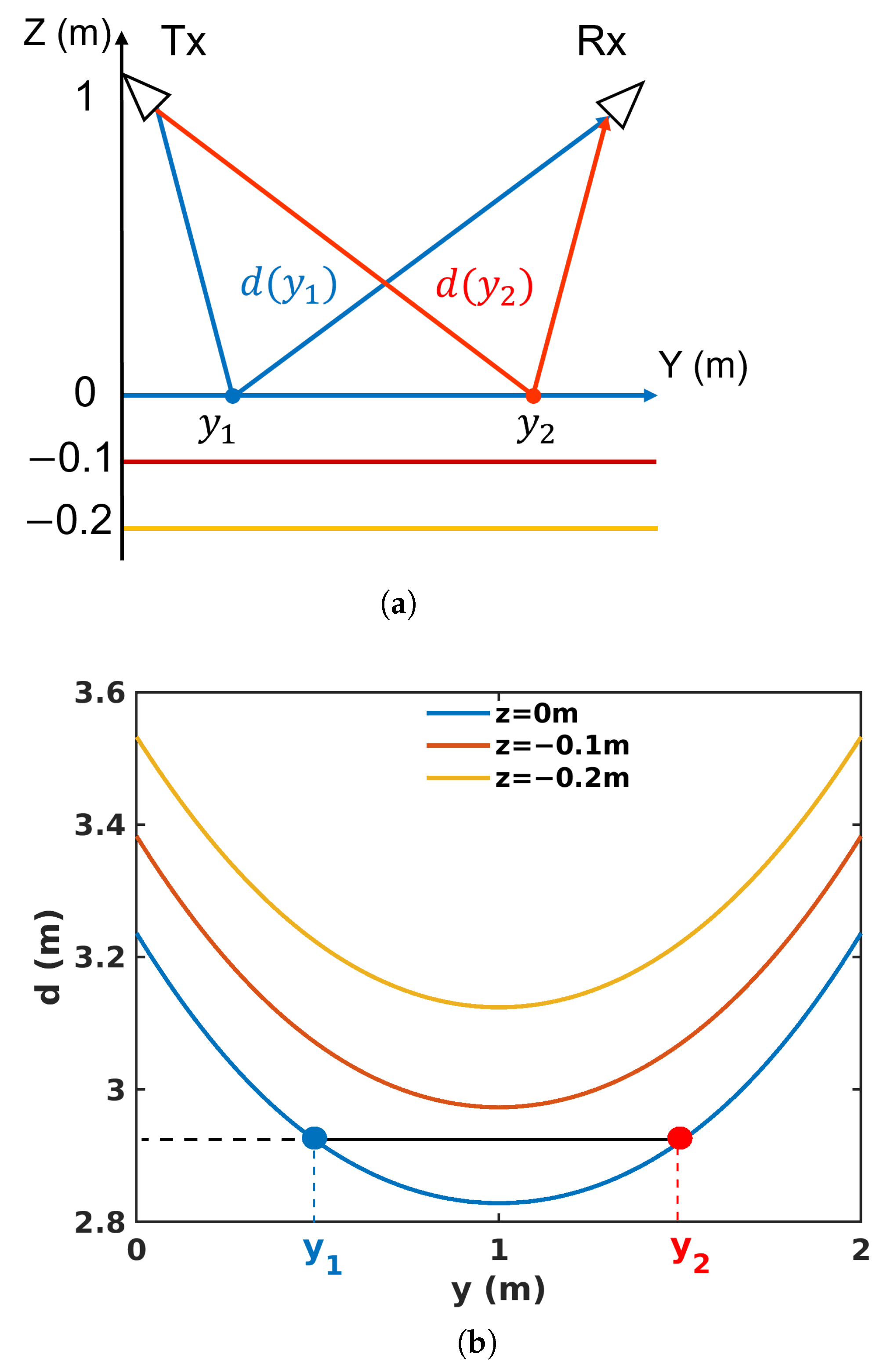
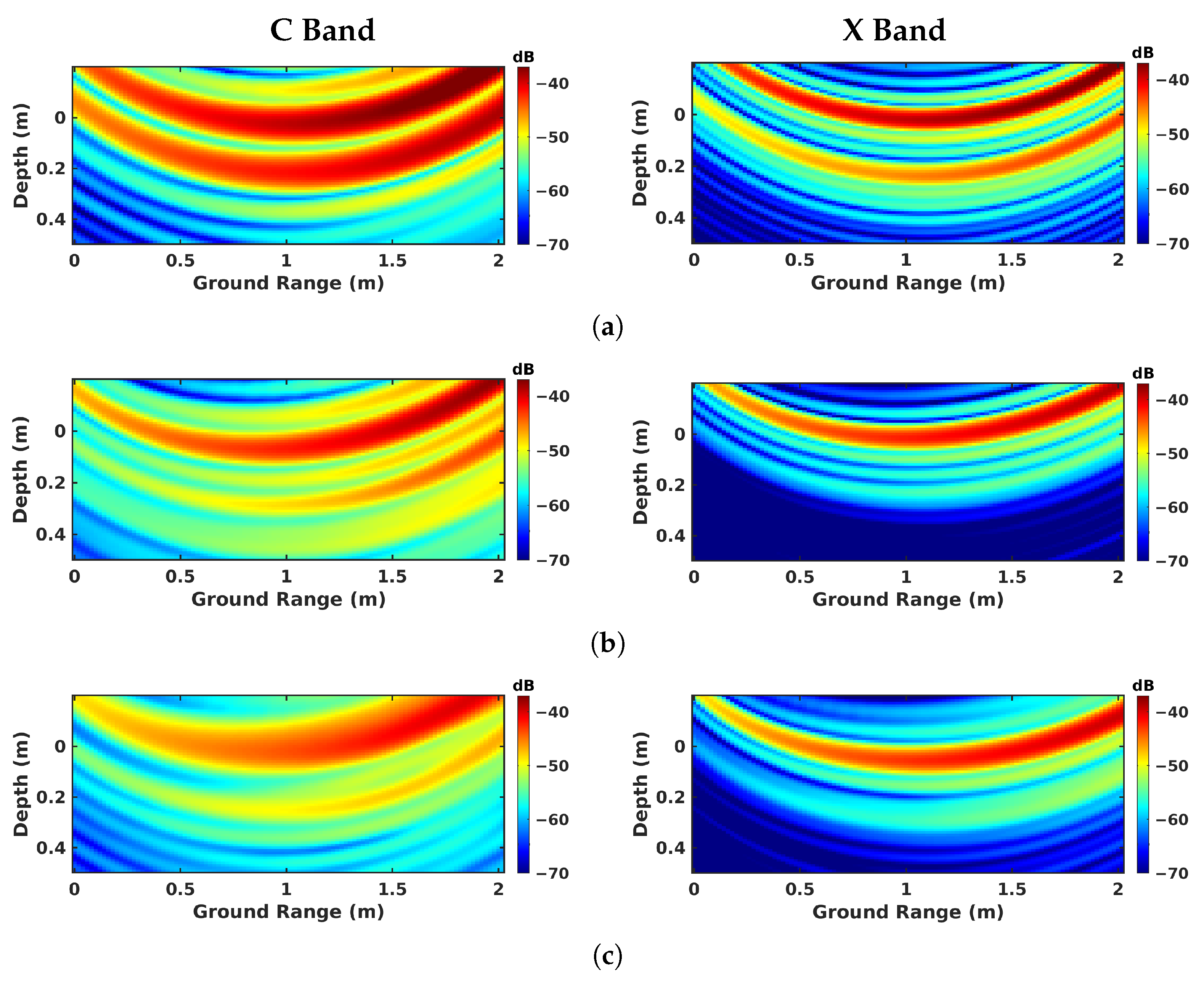
4.2. Tomography Correction with Refraction Compensation
5. Result Analysis and Advanced Feature Extraction of Roadways
5.1. Analysis of Imaging Configurations
5.2. Permittivity Estimation with Polarization Response
5.3. Roughness Estimation
6. Conclusions
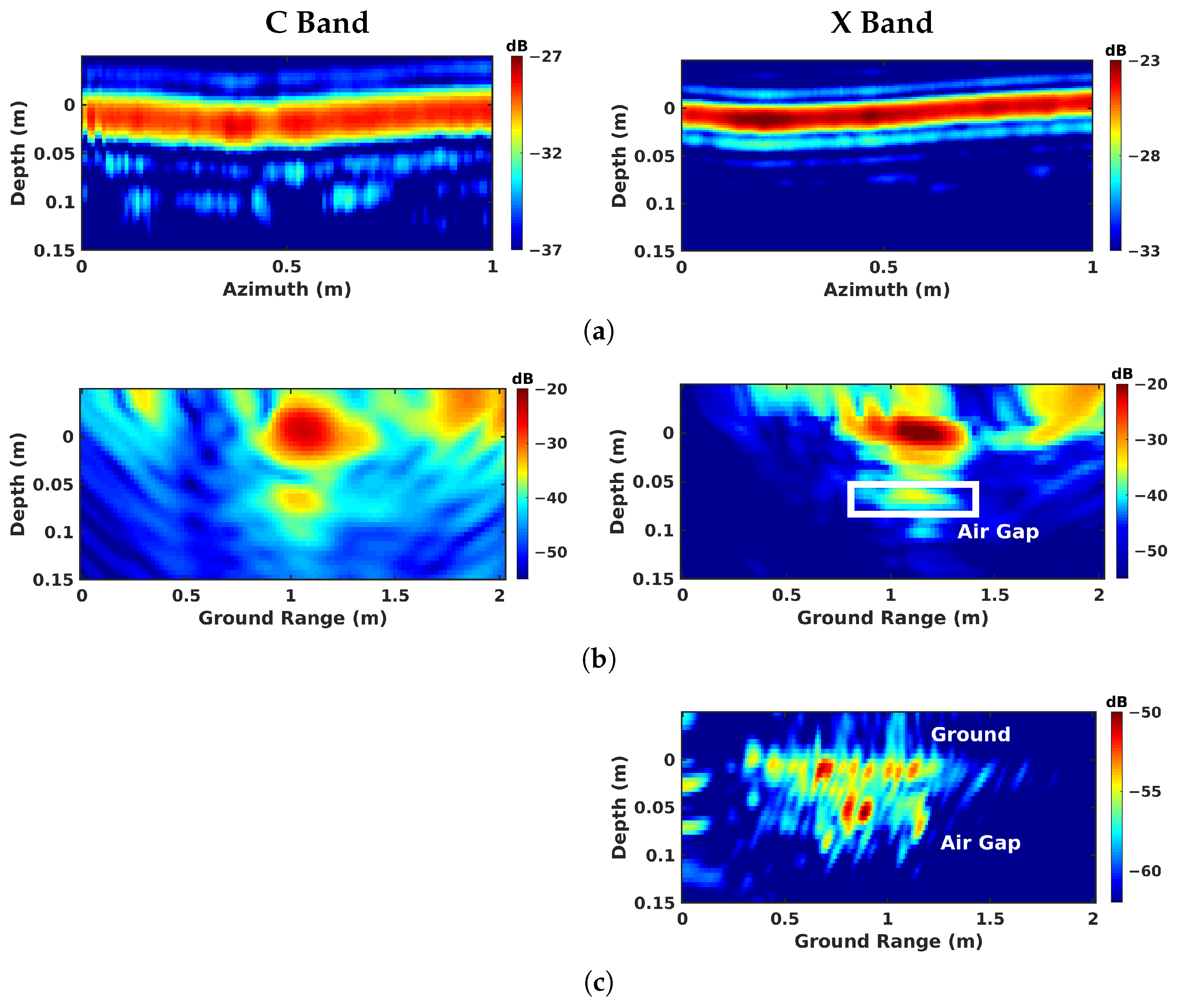
- The nadir-looking configuration, without ultra-large bandwidth conditions, fails to detect defects having a weak response, like sand-filled cracks or air gaps, in both the C and X bands.
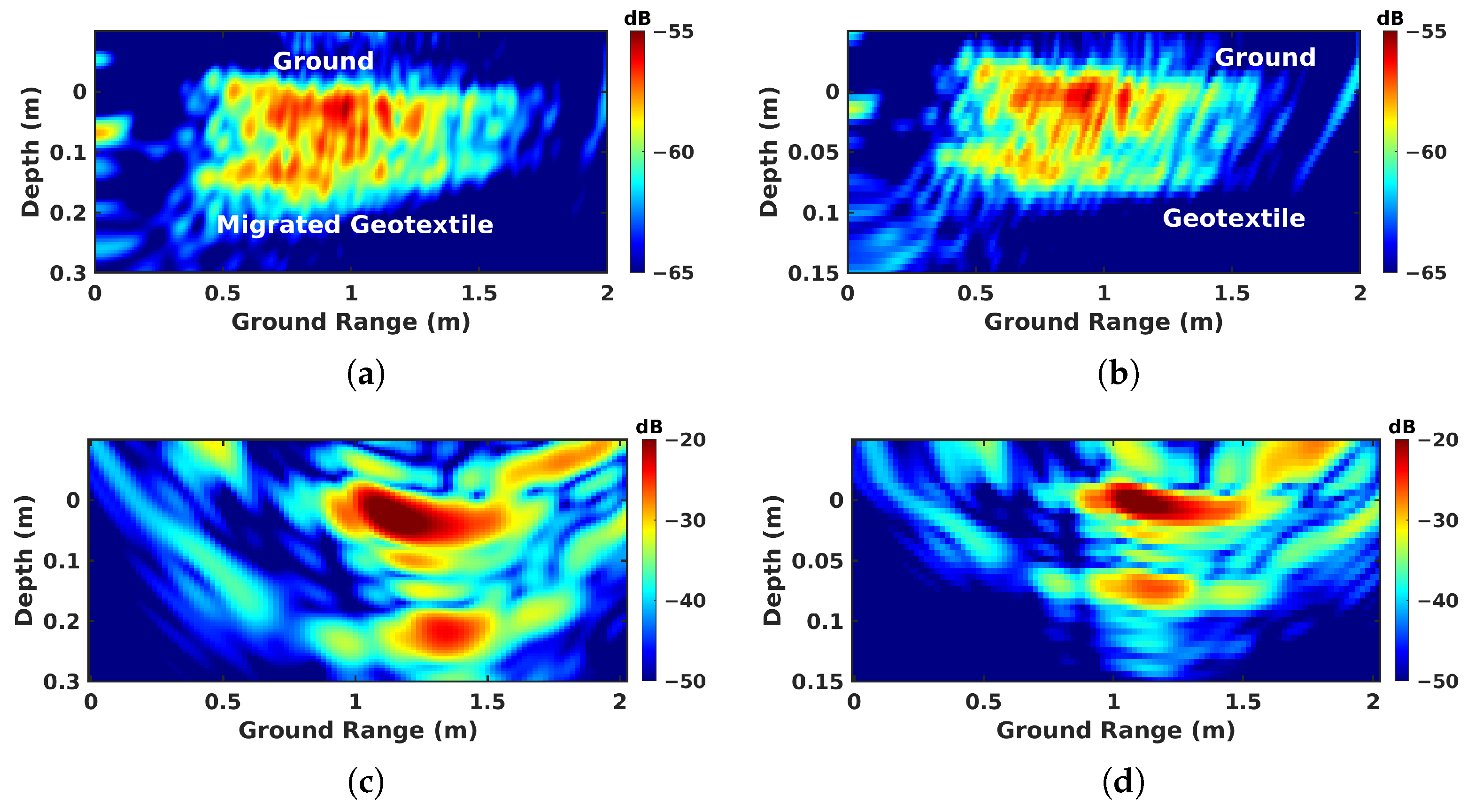
- The BSC TomoSAR mode accurately identifies geotextile and sand defects but cannot detect smooth air gaps due to insufficient response.
- The proposed FSC TomoSAR mode successfully isolates all defect types, benefiting from significant scattered signal amplitudes, even in the X band.
- Estimate the dielectric permittivity of the layers;
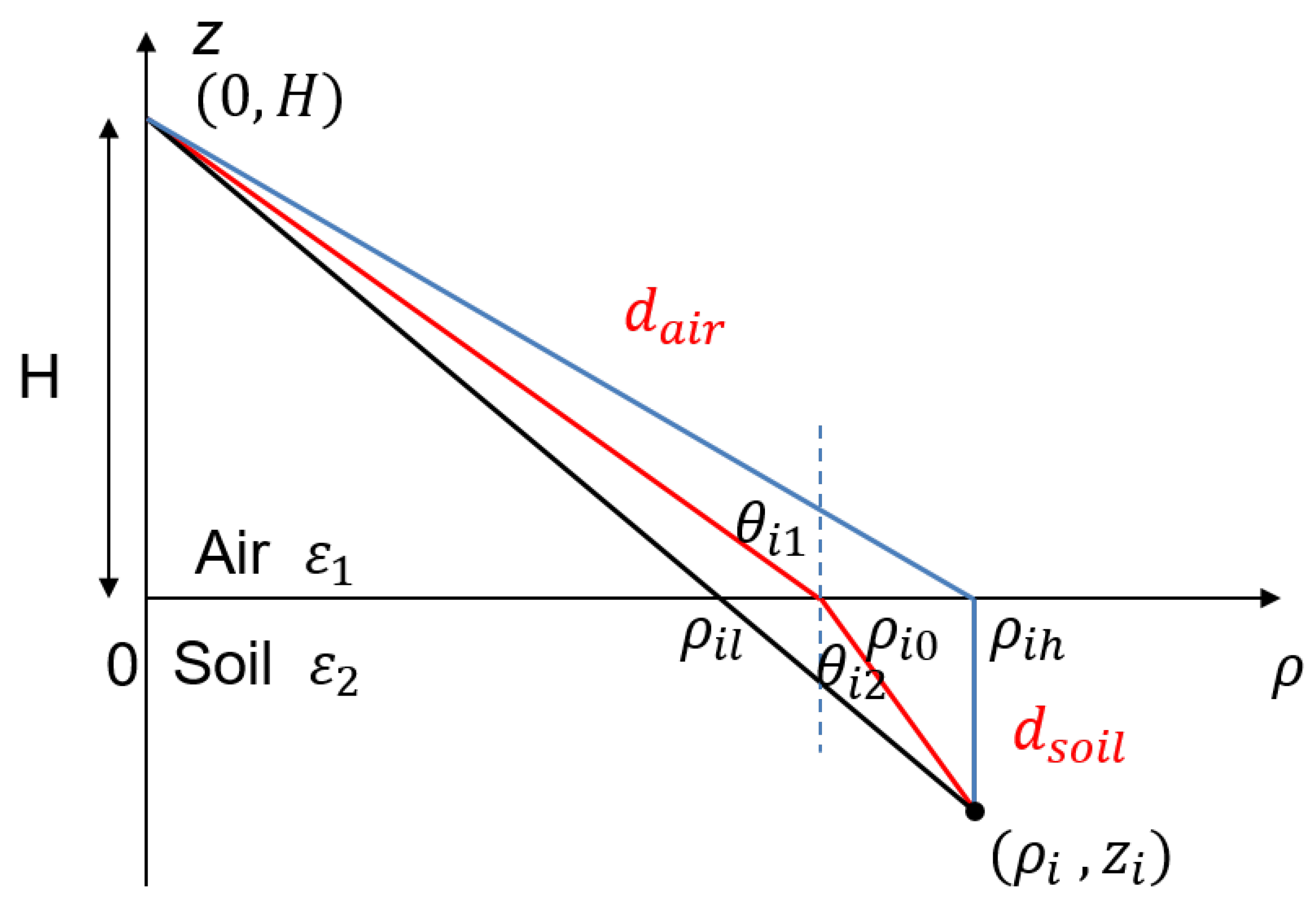
- Correct geometric distortions induced by the refraction of the signal when propagating through the 3-D medium;
- Estimate some roughness indicators for the imaged interfaces using a scattering model.
Author Contributions
Funding
Conflicts of Interest
References
- Barriera, M.; Pouget, S.; Lebental, B.; Van Rompu, J. In situ pavement monitoring: A review. Infrastructures 2020, 5, 18. [Google Scholar] [CrossRef]
- Livre Blance. Entretenir et Préserver Le Patrimoine d’infrastructures de Transport: Une Exigence Pour La France. IDRRIM 2020.
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Maser, K.R. Condition assessment of transportation infrastructure using ground-penetrating radar. J. Infrastruct. Syst. 1996, 2, 94–101. [Google Scholar] [CrossRef]
- Saarenketo, T.; Scullion, T. Road Evaluation with Ground Penetrating Radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Chazelas, A.; Dérobert, X.; Adous, C.; Villain, D.; Baltazart, V.; Laguerre, F.; Queffelec, P. EM Characterization of Bituminous Concretes Using a Quadratic Experimental Design. In Proceedings of the 2007 4th International Workshop on, Advanced Ground Penetrating Radar, Naples, Italy, 27–29 June 2007; pp. 278–283. [Google Scholar]
- Rasol, M.A.; Pérez-Gracia, V.; Fernandes, F.M.; Pais, J.C.; Santos-Assunçao, S.; Santos, C.; Sossa, V. GPR laboratory tests and numerical models to characterize cracks in cement concrete specimens, exemplifying damage in rigid pavement. Measurement 2020, 158, 107662. [Google Scholar] [CrossRef]
- Liu, H.; Yang, Z.; Yue, Y.; Meng, X.; Liu, C.; Cui, J. Asphalt pavement characterization by GPR using an air-coupled antenna array. NDT E Int. 2023, 133, 102726. [Google Scholar] [CrossRef]
- Sun, M.; Pan, J.; Le Bastard, C.; Wang, Y.; Li, J. Advanced Signal Processing Methods for Ground-Penetrating Radar: Applications to Civil Engineering. IEEE Signal Process. Mag. 2019, 36, 74–84. [Google Scholar] [CrossRef]
- Le Bastard, C. Apport de Techniques de Traitement du Signal Super et Haute Résolution à L’amélioration des Performances du Radar-Chaussée; Université de Nantes: Nantes, France, 2007. [Google Scholar]
- Soumekh, M. Synthetic Aperture Radar Signal Processing; Wiley: New York, NY, USA, 1999; Volume 7. [Google Scholar]
- Ulaby, F.; Moore, R.; Fung, A. Microwave Remote Sensing: Active and Passive; Number v. 3 in Artech House microwave library; Artech House: London, UK, 1981. [Google Scholar]
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. Geosci. Remote Sens. IEEE Trans. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2001. [Google Scholar]
- Frey, O.; Werner, C.L.; Caduff, R.; Wiesmann, A. Inversion of SNOW structure parameters from time series of tomographic measurements with SnowScat. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2472–2475. [Google Scholar]
- Yitayew, T.G.; Ferro-Famil, L.; Eltoft, T.; Tebaldini, S. Lake and Fjord Ice Imaging Using a Multifrequency Ground-Based Tomographic SAR System. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4457–4468. [Google Scholar] [CrossRef]
- Tebaldini, S.; Nagler, T.; Rott, H.; Heilig, A. Imaging the internal structure of an alpine glacier via L-band airborne SAR tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7197–7209. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Yitayew, T.G.; Ferro-Famil, L.; Eltoft, T.; Tebaldini, S. Tomographic imaging of Fjord ice using a very high resolution ground-based SAR system. IEEE Trans. Geosci. Remote Sens. 2016, 55, 698–714. [Google Scholar] [CrossRef]
- Harkati, L.; Abdo, R.; Avrillon, S.; Ferro-Famil, L. Low complexity portable MIMO radar system for the characterisation of complex environments at high resolution. IET Radar Sonar Navig. 2020, 14, 992–1000. [Google Scholar] [CrossRef]
- Desai, M.; Jenkins, W. Convolution Backprojection Image Reconstruction for Spotlight Mode Synthetic Aperture Radar. IEEE Trans. Image Process. 1992, 1, 505–517. [Google Scholar] [CrossRef]
- Dubois-Fernandez, P.; Cantalloube, H.; Vaizan, B.; Krieger, G.; Horn, R.; Wendler, M.; Giroux, V. ONERA-DLR bistatic SAR campaign: Planning, data acquisition, and first analysis of bistatic scattering behaviour of natural and urban targets. IEEE Proc.-Radar Sonar Navig. 2006, 153, 214–223. [Google Scholar] [CrossRef]
- Wu, M.; Ferro-Famil, L.; Wang, Y. Comparison of radar imaging configurations for the characterization and diagnosis of roadways. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1958–1961. [Google Scholar]
- Ferro-Famil, L.; Tebaldini, S.; Abdo, R.; Harkati, L.; Wu, M. 3D SAR imaging using bistatic opposite side acquisitions, the bizona concept. In Proceedings of the 2022 19th European Radar Conference (EuRAD), Milan, Italy, 28–30 September 2022; pp. 209–212. [Google Scholar]
- Abdo, R.; Ferro-Famil, L.; Boutet, F.; Allain-Bailhache, S. Analysis of the double-bounce interaction between a random volume and an underlying ground, using a controlled high-resolution poltomosar experiment. Remote Sens. 2021, 13, 636. [Google Scholar] [CrossRef]
- Dérobert, X.; Baltazart, V.; Simonin, J.M.; Todkar, S.S.; Norgeot, C.; Hui, H.Y. GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing. Remote Sens. 2021, 13, 1474. [Google Scholar] [CrossRef]
- Simonin, J.; Baltazart, V.; Hornych, P.; Dérobert, X.; Thibaut, E.; Sala, J.; Utsi, V. Case study of detection of artificial defects in an experimental pavement structure using 3D GPR systems. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 847–851. [Google Scholar]
- Jaselskis, E.J.; Grigas, J.; Brilingas, A. Dielectric properties of asphalt pavement. J. Mater. Civ. Eng. 2003, 15, 427–434. [Google Scholar] [CrossRef]
- Jin, T.; Zhou, Z. Refraction and dispersion effects compensation for UWB SAR subsurface object imaging. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4059–4066. [Google Scholar] [CrossRef]
- Mironov, V.; Dobson, M.; Kaupp, V.; Komarov, S.; Kleshchenko, V. Generalized refractive mixing dielectric model for moist soils. IEEE Trans. Geosci. Remote Sens. 2004, 42, 773–785. [Google Scholar] [CrossRef]
- Tsang, L.; Kong, J.A.; Ding, K.H. Scattering of Electromagnetic Waves: Theories and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2004; Volume 27. [Google Scholar]
- Porubiaková, A.; Komačka, J. A comparison of dielectric constants of various asphalts calculated from time intervals and amplitudes. Procedia Eng. 2015, 111, 660–665. [Google Scholar] [CrossRef]
- Adous, M. Caractérisation Électromagnétique des Métariaux Traités de Génie Civil dans la Bande de Fréquence 50 MHz–13 GHz; Université de Nantes: Nantes, France, 2006. [Google Scholar]
- Cao, Q.; Al-Qadi, I.L. Effect of moisture content on calculated dielectric properties of asphalt concrete pavements from ground-penetrating radar measurements. Remote Sens. 2021, 14, 34. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Modes | Advantage | Drawback |
|---|---|---|
| Nadir-looking | Excellent vertical resolution | No focusing on AZ, low polarimetric sensitivity |
| BSC Tomo | Polarimetry, good resolution, sensitive to roughness | Complex, long time |
| FSC Tomo | Polarimetry, good resolution both H/V | Complex, long time |
| FSC single-channel | Polarimetry, good vertical resolution | Poor horizontal discrimination |
| C Band | X Band | |
|---|---|---|
| 5.85 GHz | 10 GHz | |
| 2.3 GHz | 4 GHz | |
| 1001 | 2001 | |
| 2 m | 2 m | |
| 0.8 m | 0.72 m | |
| 0.04 m | 0.03 m | |
| 0.08 m | 0.06 m | |
| Polarization | HH/VV | HH/VV |
| C Band | 6.52 | 15.01 | 9.22 | 9.22 | 41.57 | 9.82 | 9.22 | 9.22 | 20.85 |
| X Band | 3.75 | 8.73 | 5.3 | 5.3 | 24.32 | 5.71 | 5.3 | 5.3 | 12.21 |
| Focusing Method | Time |
|---|---|
| Raw focusing without compensation | 8 s |
| Focusing with compensation | 82 s |
| Focusing with optimized compensation | 36 s |
| Zone | Geotextile Zone | Sand Zone | Air-Gap Zone | |||
|---|---|---|---|---|---|---|
| Marker | ||||||
| FSC Tomo | 6.26 | 0.29 | 7.55 | 2.9 | 8.15 | 4.63 |
| 5.8 | ≫80 | 4 | 9.5 | 4.1 | 6.3 | |
| FSC Single-Channel | 6.16 | 0.26 | 8.85 | 0.07 | 9.72 | 3.17 |
| 6.1 | ≫80 | 3.7 | ≫80 | 3.7 | 7.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, M.; Ferro-Famil, L.; Boutet, F.; Wang, Y. Comparison of Imaging Radar Configurations for Roadway Inspection and Characterization. Sensors 2023, 23, 8522. https://doi.org/10.3390/s23208522
Wu M, Ferro-Famil L, Boutet F, Wang Y. Comparison of Imaging Radar Configurations for Roadway Inspection and Characterization. Sensors. 2023; 23(20):8522. https://doi.org/10.3390/s23208522
Chicago/Turabian StyleWu, Mengda, Laurent Ferro-Famil, Frederic Boutet, and Yide Wang. 2023. "Comparison of Imaging Radar Configurations for Roadway Inspection and Characterization" Sensors 23, no. 20: 8522. https://doi.org/10.3390/s23208522
APA StyleWu, M., Ferro-Famil, L., Boutet, F., & Wang, Y. (2023). Comparison of Imaging Radar Configurations for Roadway Inspection and Characterization. Sensors, 23(20), 8522. https://doi.org/10.3390/s23208522