1. Introduction
Pipeline leakage is a significant problem in the public water supply industry. According to EurEau (European Federation of National Associations of Water Services), the mean leakage rate of drinking water distribution networks throughout Europe is about 25% of all water provided [
1]. This means that approximately 2700 m
3 of water are wasted yearly per km of pipe. Financial losses for suppliers are the most direct consequences of water waste due to leaks, but this problem has environmental and social consequences too. Leaks can indeed exacerbate the water scarcity issue, which, at certain times of year, is affecting a growing number of people and bigger areas of Europe as a result of climate change [
2]. For these reasons, the problem of water leakage has been addressed by a recent European Union (EU) Directive [
3], which states that water leakage levels should be monitored and reduced. Reliable and accurate methods for locating leaks in pipes are, therefore, of great interest nowadays.
Many different approaches have been proposed and developed over the years for leak detection in water pipes [
4]. The most direct method is based on visual inspection, which relies on the usage of endoscopes or robots equipped with cameras and guided inside pipes. This is a very simple method conceptually, but it also requires a big specialized human intervention for interpreting images and data. Electromagnetic (EM) inspection methods such as magnetic flux leakage, remote field eddy current and ground penetrating radar are also used for status assessment of metallic pipes. These techniques evaluate the metal conditions based on the interaction between transmitted EM signals and the metallic pipes. Other methods are, instead, based on the use of acoustic and ultrasonic waves [
5]. The effectiveness of all these methods depends on the kind of material and on the geometry of the pipes, on the working conditions of the water distribution network (e.g., water pressure) and on the environmental conditions. Even more importantly, expert personnel are required for measurement operations and for result interpretation, which prevents them from being considered for continuous monitoring of pipes.
An alternative approach proposed in 2012 [
6,
7,
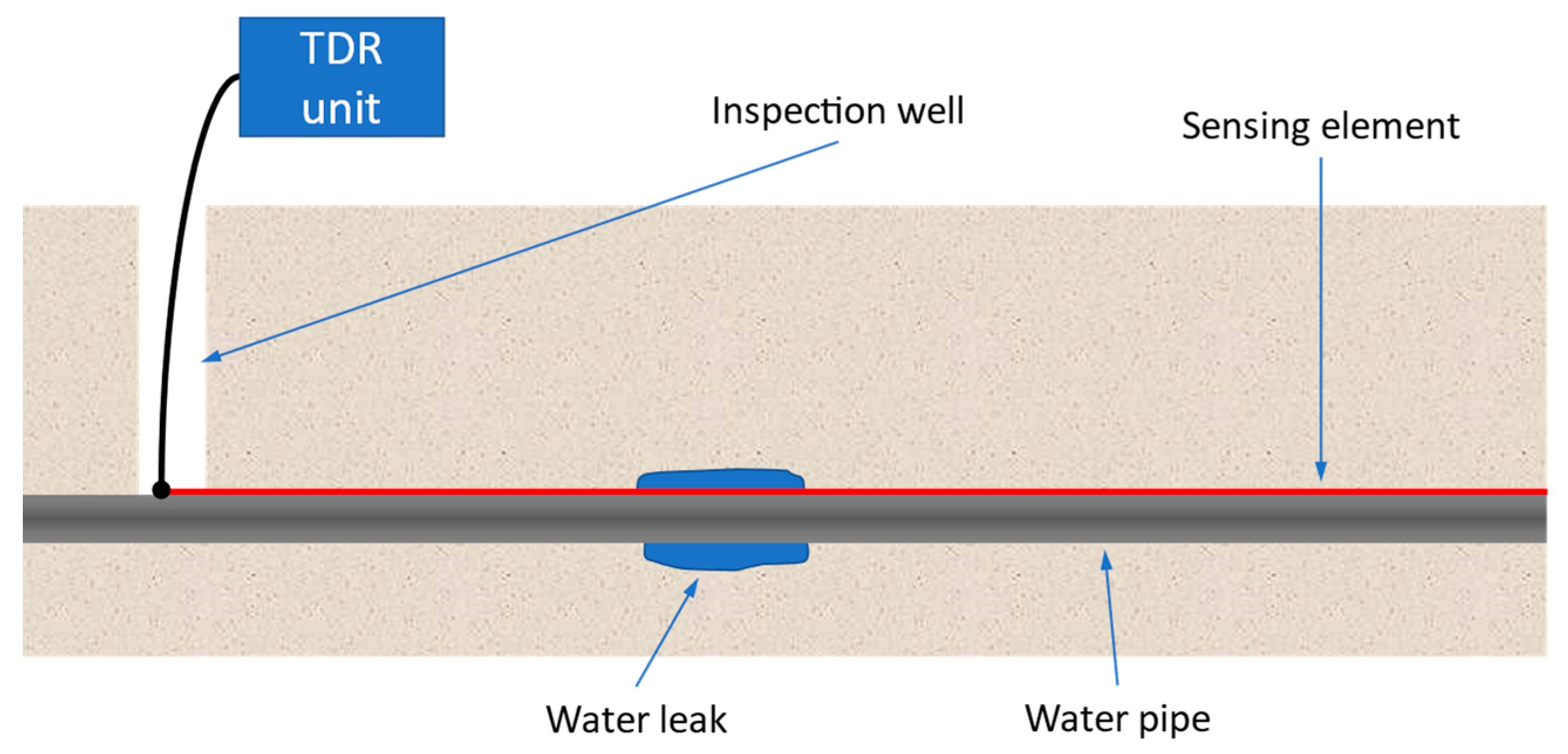
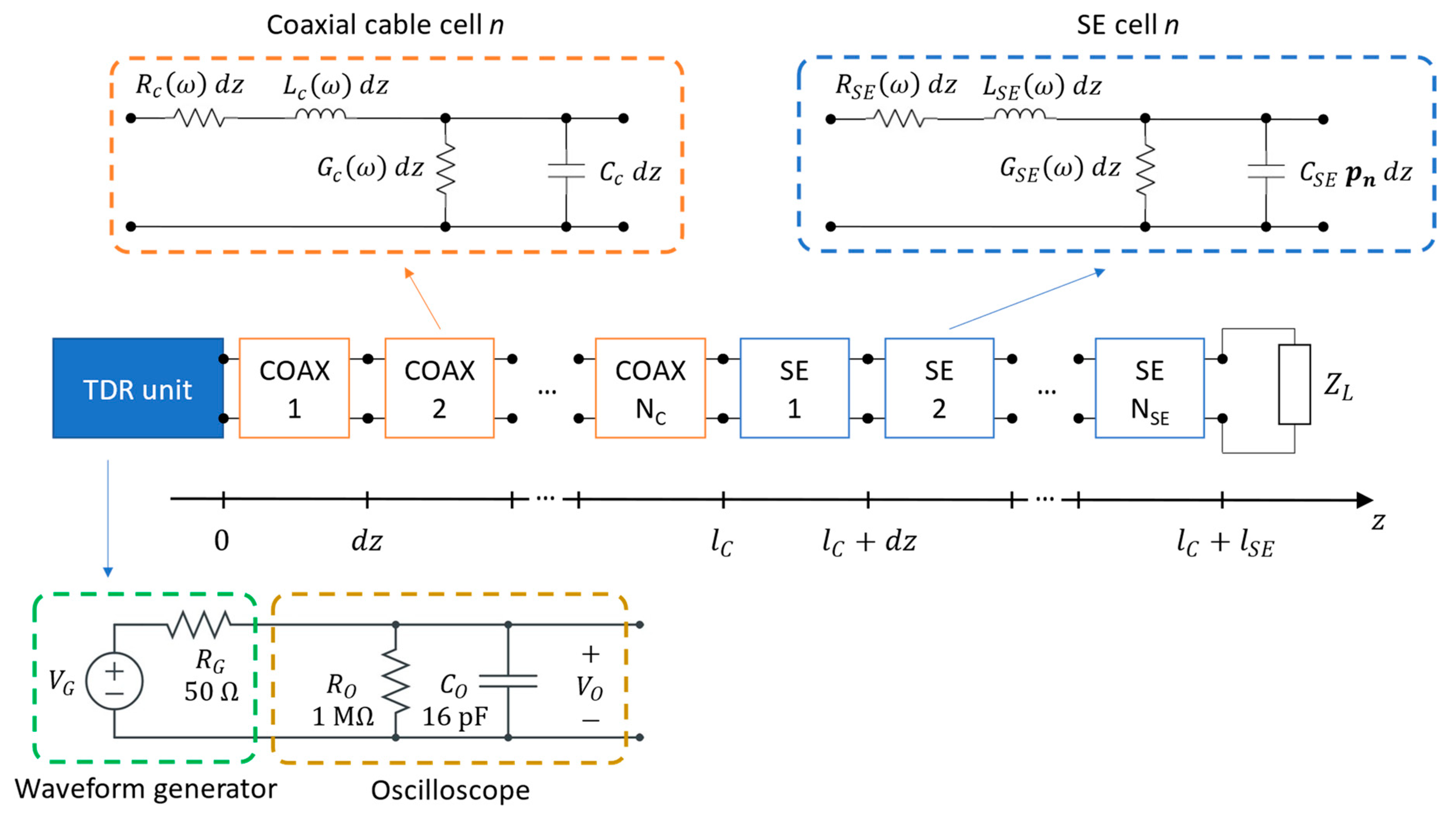
8] is based on the use of time domain reflectometry (TDR). The method exploits EM waves propagating in a distributed sensing element (SE) placed near the pipe (typically less than 1 cm from the pipe) to detect and localize water leaks, as shown in
Figure 1. The SE is a transmission line (TL), e.g., a bi-wire cable, whose primary parameters are affected by changes in the dielectric constant of the surrounding medium. The presence of water leaking from the pipe increases locally the dielectric constant of the medium and can, therefore, be detected by a reflectogram, as a reflection caused by the locally increased capacitance per unit length. The reflectogram is obtained by transmitting a stimulus signal from one end of the SE and measuring the reflected signal at the same point. In this way, long segments of the pipe can be analyzed with just one measurement. As a matter of fact, SEs up to 100 m long have been successfully used for water leak detection [
6]. As of the current date, systems of this kind have been installed in more than 50 km of water pipes by AQP (public water operator of the Apulia region, Italy, and the largest water facility in Europe), proving the effectiveness of the methodology.
With respect to other available techniques for water leak detection in pipes, the TDR-based method has the advantage of not imposing requirements on the construction material of the pipes (because water in the soil around the pipe is detected) or on their operating conditions, leading to greater ease of use. TDR-based techniques also drastically reduce the amount of time needed for inspection compared to conventional leak detection techniques; in fact, hundreds-of-meters-long pipes can be inspected with a single measurement operation. Besides, TDR is a well-established technique already used for many applications such as detection and localization of cable defects [
9,
10,
11,
12], monitoring of landslide [
13,
14], characterization of antennas [
15] and measurement of dielectric properties of materials [
16,
17], of liquid level in tanks [
18], of soil moisture [
19], of water diffusion in irrigation [
20] among many others, even in the biomedical field [
21]. A possible disadvantage of TDR-based water leak detection is that the SE must be installed near the water pipe, and, hence, it is difficult to use the technique in existing pipelines. This is not very limiting, however, since the SE can be installed during usual maintenance operations, which provide for the periodic replacement of sections of pipes.
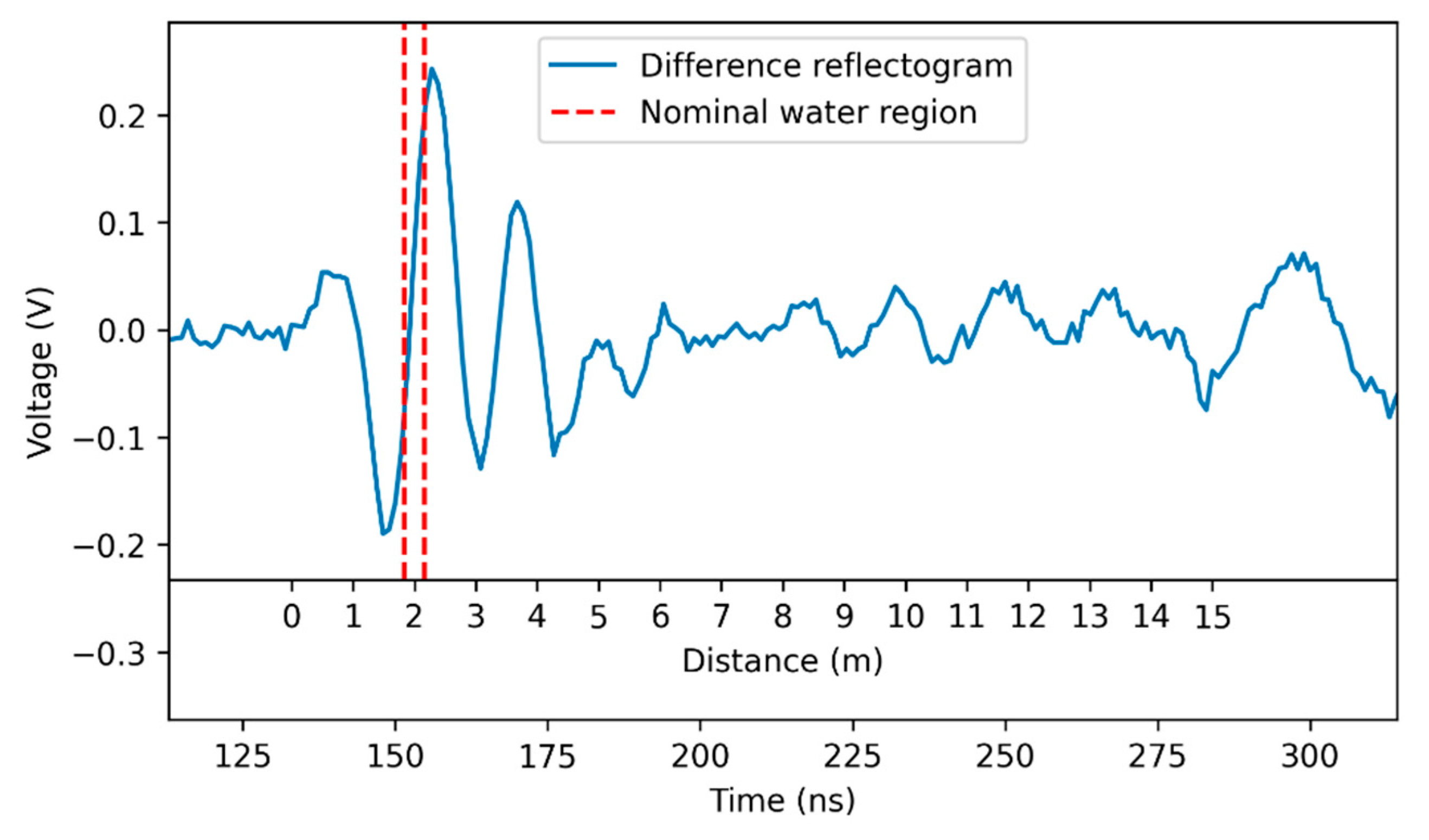
A limitation of the TDR method is that the local increase in the dielectric constant caused by the leak must be clearly visible in the reflectogram in terms of a clear difference [
7] between the “reference reflectogram” (taken without leak), and the “measurement reflectogram” (taken in presence of leak). As better shown in the next sections, this is not always the case: quite often, an incipient water leak causes a comparatively small variation of dielectric constant, which cannot be accurately detected visually, since the corresponding variation in the reflectogram is small or masked by other disturbance factors and unwanted effects which typically influence on-field measurement. It is worth noting that, in this case, evaluating a simple “difference reflectogram” between the measurement and the reference reflectogram is not a solution: a local change of dielectric constant causes changes in the whole reflectogram due to reflections, changes in the propagation velocity, etc. This is clearly observable in the examples reported in
Section 3.
As a matter of fact, when the measurement reflectogram is not clearly interpretable, a TDR inversion–or spatial TDR–is a key issue for localizing, more accurately than an intuitive visual interpretation, the change in the spatial profile of dielectric constant. This operation is also useful for an accurate localization in addition to a reliable detection. Indeed, it must be noted that having a reasonably accurate measurement of the leak position is very important for the repair team, who is required to carry out excavations.
TDR inversion algorithms have already been presented and used successfully in the literature but in experimental situations quite different from the one here considered. Usually, the inversion problem is reduced to the minimization of an objective function whose gradient has a known analytical expression. In [
22] and [
23], the TDR inversion works well but for simulated ideal models. In [
24], the TDR inversion is performed for an experimental setup, which uses a soil moisture TDR probe with accurately known electrical parameters (a classic flat-ribbon cable with three conductors) and in conditions allowing the use of a very simple model of its primary parameters. The same kind of TDR probe is used in [
25], and, in this case too, the electrical parameters of the probe are accurately determined and validated through laboratory experiments and full-wave simulations. A satisfactory TDR inversion is also obtained in [
26]: in this case, the probe is carefully characterized with frequency domain measurements, performed using a properly calibrated VNA (Vector Network Analyzer). In general, in all TDR inversions known to the authors, determining the parameters of the employed probe and of the other components of the measurement system is a preliminary step, necessary to performing the actual inversion.
In the set-up depicted in
Figure 1, an accurate characterization of the measurement system is unavailable and cannot be obtained a priori with, e.g., VNA measurements. First of all, the probe, i.e., the SE, is a buried bi-wire cable. Therefore, it is tens of meters long, inevitably twisted and stressed, and it is surrounded by a medium with an uneven and unknown profile of dielectric constant. Characterizing a short section of the SE in air is not simple (it is a balanced line, not matched with the ports of a VNA), but, more importantly, the characterization would be of no use to model the cable when it is buried near the pipe.
In the experimental situation of
Figure 1, other parameters are also not known with sufficient accuracy: namely, the electromagnetic parameters of the coaxial cable and of its connection with the TDR unit are not necessarily the same that could be determined in laboratory making use of dedicated instrumentation. These parameters should be determined for the actual setup on the field. The same applies, of course, to the SE termination.
Consequently, classic TDR inversion methods are substantially inapplicable to the problem at hand: a method that does not require prior characterization of the measurement system components is needed. It must also be underlined that classic methods often use reflectograms taken from both ends of the probe (in early works like [
22,
23], and in recent works like [
27,
28]) since TDR inversion with a single reflectogram, under the hypotheses considered in these papers, is mathematically an ill-posed problem. Instead, a TDR inversion with a single reflectogram, like in [
29], is highly desirable for the considered problem of water-leak detection, but it is necessary not to limit too severely the class of identifiable capacitance profiles.
In this paper, a TDR inversion method suitable for water-leak localization in underground pipes, using a setup similar to that described in
Figure 1, is proposed. The basic idea is to identify a circuital model of the on-field measurement system, able to reproduce very accurately both the “reference reflectogram” and the “measurement reflectogram” even if:
- (1)
the reflectograms are very irregular, a condition inherent to the situation of a long SE buried along a pipe;
- (2)
the electromagnetic parameters of the SE, and of other components of the measurement system, are not known in advance, and must be determined directly on the field.
This model is not designed to represent accurately the physical reality of the system (which includes non-TEM (transverse electromagnetic) modes, radiative phenomena, interfering fields, non-ideality of connections, etc.) but simply to reproduce the observed reflectograms including the multiple reflections (voltage recorded after the first reflected pulse).
The circuital model, and the identification procedure, are then used for leak detection and localization, based on measuring the capacitance profile needed to reproduce the reflectogram as it derives from the presence of a leak. As shown in the next sections, the proposed technique has clear advantages with respect to traditional techniques when analyzing reflectograms measured in the presence of water leaks which produce small variations of dielectric constant. In these cases, indeed, results obtained with traditional techniques based on the observation of the reflectogram are very ambiguous while the proposed algorithm is able to effectively detect and localize the water leak.
It is worth noting that the proposed method can be easily extended to a number of other TDR-based applications, such as those for detecting soil moisture, cable faults, defects in transmission lines, etc. The advantage of the method is that almost no prior knowledge of the electrical parameters of the probes and of the measurement system components is required, which makes it more flexible and general, and much easier to apply. Investigating such different application of the method, of course, is the subject for separate works.
2. Materials and Methods
2.1. Reflectograms in TDR Leaks Detection in Water Pipes
The on-field measurement setup for TDR-based leak localization in underground water pipes (
Figure 1) has been already illustrated and discussed with some detail in the Introduction. We add here that the TDR unit can be a dedicated commercial device or can be realized with general purpose instruments (e.g., waveform generator + oscilloscope).
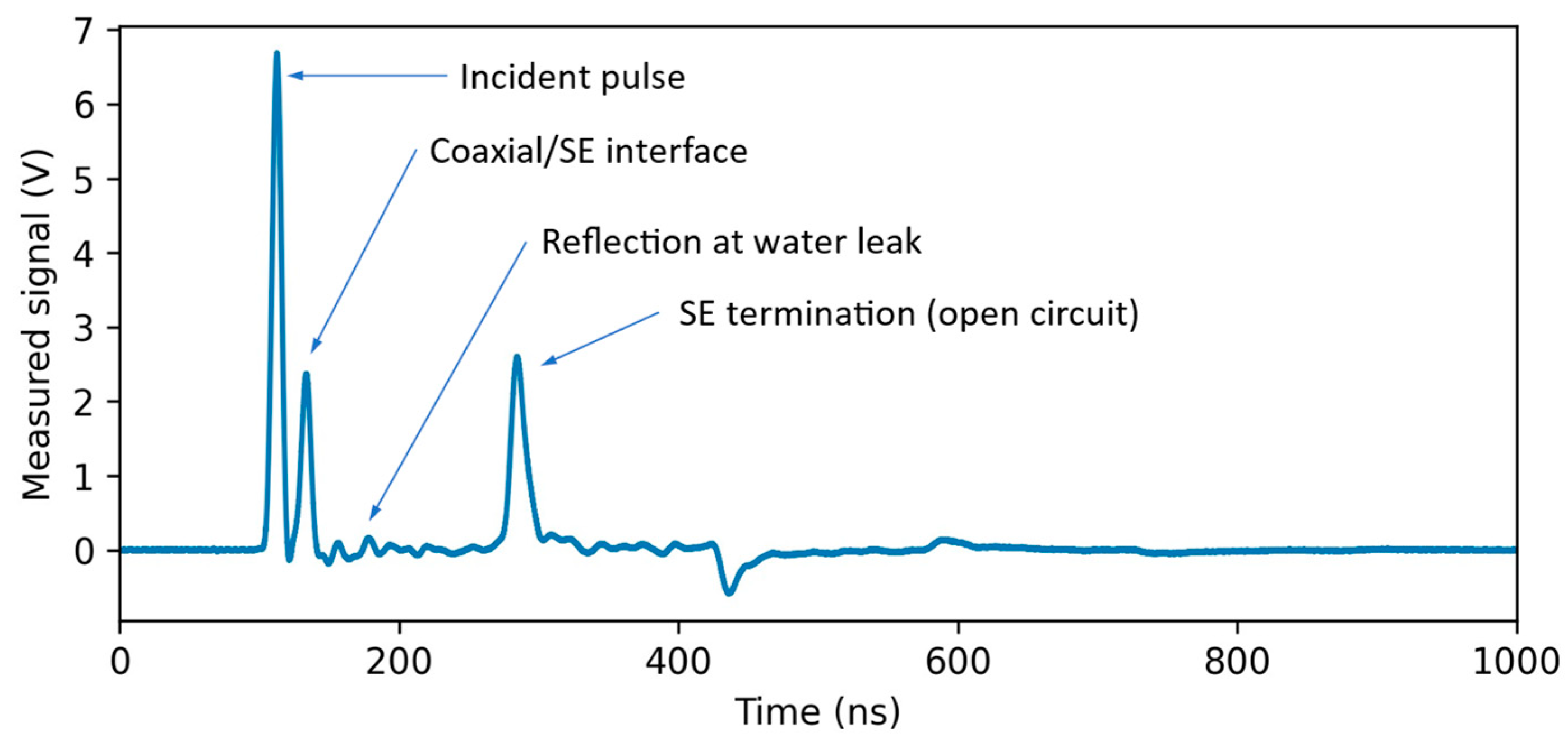
A typical signal obtained using the described measurement setup, with the SE terminated in open circuit, is shown in
Figure 2. An impulsive voltage waveform is transmitted to the SE and reflected at different points. The first significant reflection occurs at the interface between the coaxial cable and the SE and is due to the quite different characteristic impedance of the connected TLs. The reflection at the SE end is also very strong, due to the open termination. The reflection at the water leak is also visible in the example, but, in this case, its amplitude is comparable to other small reflections due to non-idealities of the SE (e.g., twists and stress on the bi-wire) and to the inhomogeneity of the medium around it. In this TDR signal, the water leak is hardly detectable and localizable. Detection and localization in this situation is exactly the goal of the method illustrated in this work.
2.2. Laboratory Experimental Setup
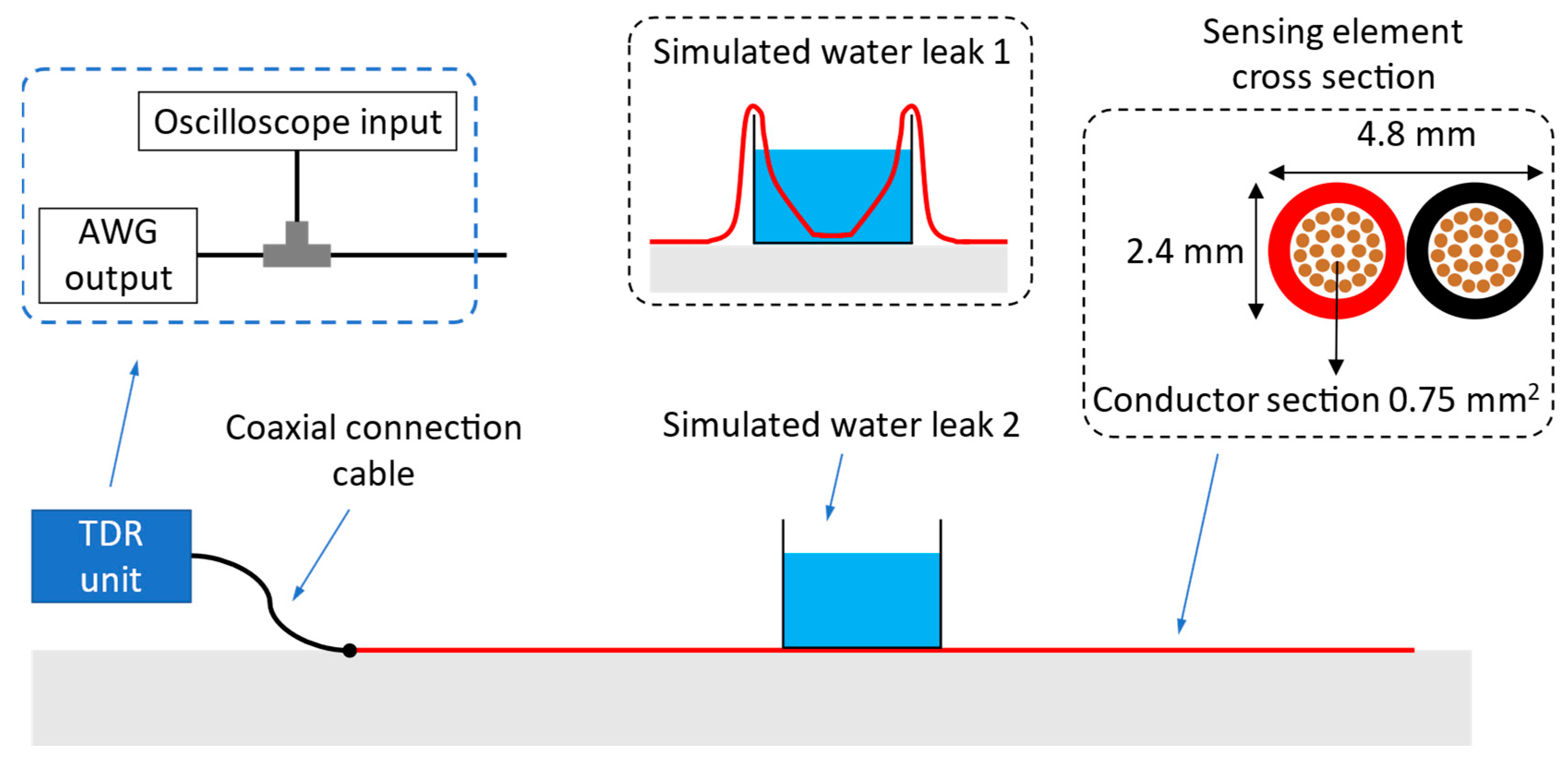
For the purpose of the present investigation, an “ad-hoc” laboratory set-up has been arranged, described in
Figure 3. The TDR unit is implemented using an Agilent 33250A arbitrary waveform generator (AWG) for the stimulus signal and a LeCroy Waverunner-2 LT262 oscilloscope for signal acquisition. The AWG and the SE are connected to the oscilloscope through a T-junction and a short RG58-CU coaxial cable. The SE is a bi-wire cable having the cross-section shown in
Figure 3. The two conductors of the SE are composed of 24 copper-clad aluminum wires coated with polyvinyl chloride (PVC).
The whole setup is designed to perform several laboratory experiments with many different accurately known distributions of water near the SE. Nonetheless, it is not so easy to obtain an accurate electromagnetic model of the system, and this situation mimics an on-field measurement setup.
First of all, the SE is 15 m long and lies freely on the floor: it is, therefore, unavoidably twisted at random points. The parameters of the TL constituted by the SE are influenced by the floor and are not the same as would be observed in air. The SE is not shielded from electromagnetic fields in the laboratory. The connection between the (unbalanced) coaxial cable and the (balanced) SE is realized with simple crocodile clips, and, therefore, its effect on the reflectogram, although certainly not very large, is not known.
It is useful to note that, in practical on-field leak measurements, the SE has more distance between the wires and, therefore, higher sensitivity. In laboratory experiments it is preferable to use an SE with low sensitivity, since it makes it simpler to obtain realistic reflections associated with leaks using only water, instead of a mix of soil and water.
More specifically, in our experiments water leaks are simulated by (method 1) submerging the SE in water or (method 2) by placing a water container on the SE. Method 1 produces a visible reflection, like those observed in the field with a more sensitive SE, when a big leak soaks the soil surrounding it. Method 2 produces a much weaker reflection, like those observed in the field when the leak is smaller and the surrounding soil is moist but not soaked. It is worth noting that the placement of the water container above the SE is a practical device to obtain a weaker reflection in laboratory tests and does not replicate an actual on-field condition. In installed systems, indeed, all the soil around the SE is moist due to water leaking from the pipe.
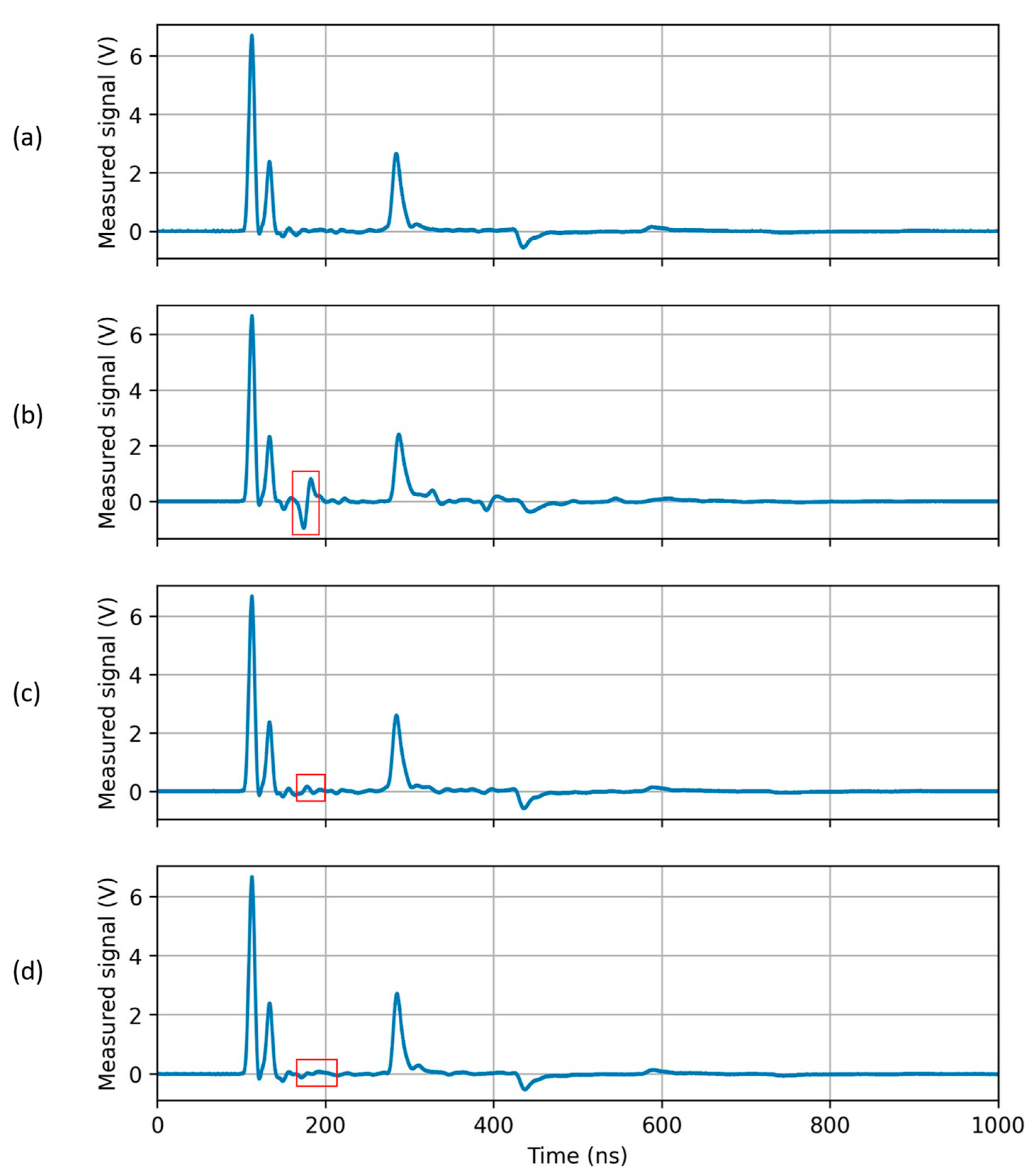
Typical measured signals that are analyzed in the paper are depicted in
Figure 4. Signal (a) is acquired in normal (i.e., dry) conditions. It can be a “reference reflectogram”. Signal (b) is acquired with method 1, with a water container length of 33.5 cm (water height is, for this and the other experiments, about 2 cm). The pulse reflected by water, highlighted by a red box, is clearly observed. Signal (c) is acquired with method 2, with the same 33.5 cm long water container. Due to the distance between the SE and the water (separated by the bottom of the 2 mm thick container), the parameters of the TL are less influenced, and, hence, a smaller reflection is produced. The last signal, in
Figure 4d, is also acquired with method 2 but, in this case, the water container is 2 m long. Therefore, this case is similar to (c), but the water is distributed in a wider region.
2.3. Measurement System Modeling
The first step for locating the water leaks via TDR inversion is modeling the measurement system. The adopted model is represented in
Figure 5.
For the coaxial cable and the SE, a classic lumped-element model with pi cells is used, terminated on the load
. The two TLs are composed of
and
cells, respectively, of length
. The total lengths of the cables are therefore, respectively,
The following frequency-dependent models are used for the primary parameters
,
,
,
, for both the coaxial cable and the SE:
where
is the angular frequency and
are six adjustable parameters. The employed functions of the frequency are justified by the dielectric dispersion and the skin effect phenomena. It can be easily verified that, neglecting these effects, the model would be able to reproduce only very coarsely the actual observed reflectograms.
The capacitance of the SE, which is the parameter of interest in the analysis (influenced by the permittivity of the medium around the SE), is independent of the frequency, but dependent on the position
. Thus, the model of the capacitance per unit length of the
-th cell is
where
is a multiplicative parameter applied the
-th cell. The circuital model is completed by that of the waveform generator and of the oscilloscope, also depicted in
Figure 5, and by the impedance
of the SE termination.
The described circuital model is clearly only an approximation of the physical reality and is not intended to provide a faithful representation of the electromagnetic behavior of the measurement system, as a full-wave simulation can do. Non-TEM modes and radiative phenomena, for example, are not modeled. However, the model can produce reflectograms that fit on-field measurements very well, as shown in
Section 3. Moreover, the model is much simpler and computationally cheaper than full-wave models and can, therefore, be effectively integrated in the simulation-based optimization routine needed for its identification.
2.4. Measurement System Simulation
The model is used to actually simulate the measurement system and generate the reflectograms corresponding to given values of all the parameters. To this purpose, it is implemented in the simulator described in [
30], which works in the frequency domain and is able to compute efficiently the output, handling frequency-dependent primary parameters. In order to obtain good simulation results, the cell length must be chosen conveniently small with respect to the minimum wavelength
propagating in the cables. The cell length is given by:
where
is the maximum frequency considered in the simulation, and
is a tunable parameter. The frequency
is determined by the impulsive signal of the generator; a rule of thumb for the choice of
is
[
30]. The value of this parameter determines the density of the TL model and, hence, the accuracy in simulating a continuous system. In this work, the value
has been used; greater values lead to negligible improvements and higher computation time. Since during the optimization the values of the parameters and, therefore, of
, change at each iteration, the number of cells is recomputed each time, according to Equations (8), (1) and (2).
2.5. Measurement System Identification
The system model is identified by minimizing the root mean square error (RMSE) between the measured reflectogram and the simulated one. Minimizing this objective function is conceptually very simple but requires some attention for its actual implementation.
It is important to underline that, in principle, all the parameters of the model described in
Section 2.3 can be involved in the optimization process, including the impedance of the generator and of the oscilloscope. We kept these impedances fixed to their nominal values reported in
Figure 5, since optimizing them proved, in our experiments, not useful to improve the fitting. We also kept fixed the length
of the coaxial cable used for the connection and the length
of the SE, which are easy to be known in advance with sufficient accuracy.
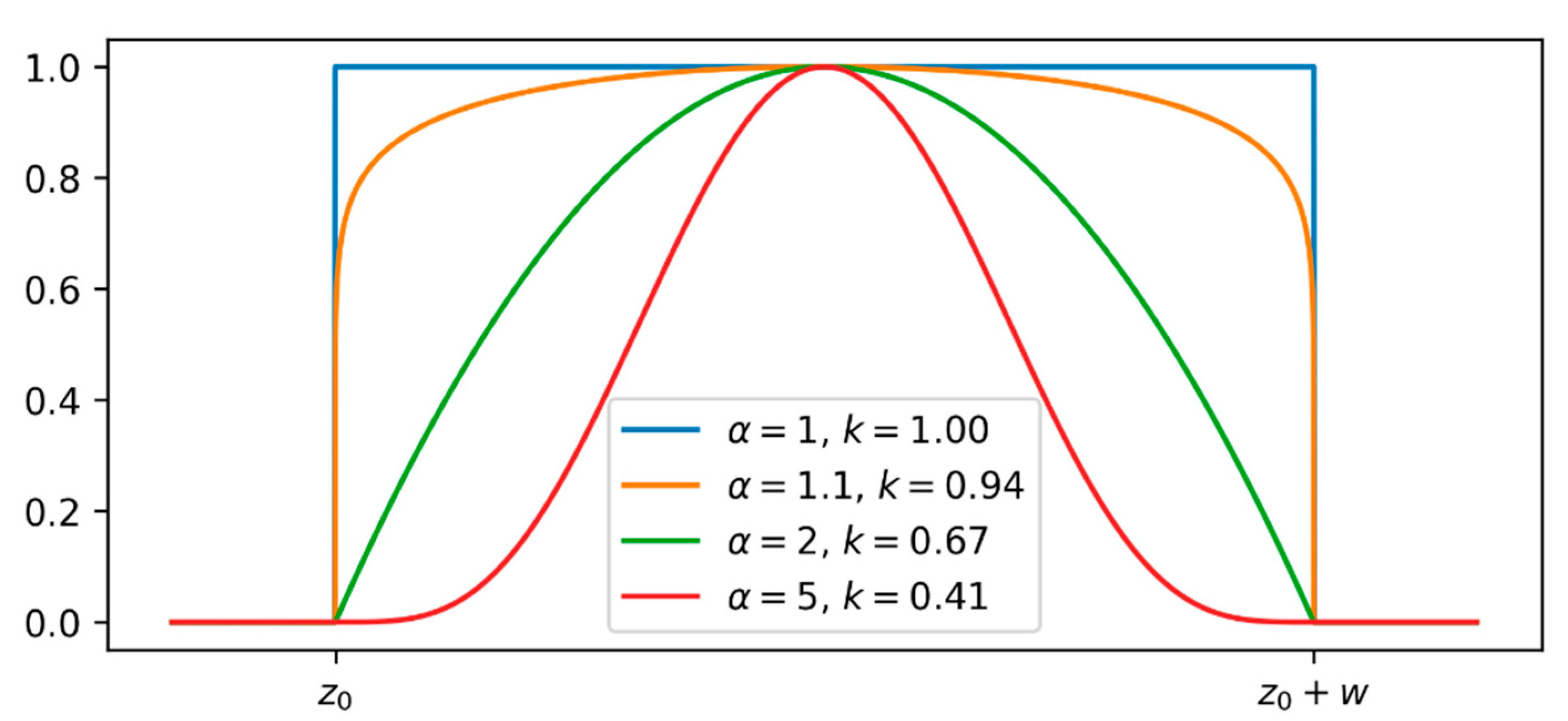
It is convenient for the optimization process to introduce a functional representation with a fixed number of parameters of the position-dependent capacitance profile , since the number of cells depends on and is not fixed (besides being quite high, in our tests). A possibility is the multi-sine signal, which represents well a general band-limited function. In our case, however, we opted for representing as a sum of equispaced Gaussian pulses, with standard deviation equal to the distance between the peaks of two consecutive pulses, and different amplitudes, which are, therefore, the free parameters. This model is more effective for the optimization process, because each parameter influences a limited region of the profile, and not the whole profile as in the case of the multi-sine signal. It was determined that parameters are able to describe the capacitance profile with sufficient generality for typical measured reflectograms. This parameter can be increased, however, when working with more irregular reflectograms.
As a final note, the termination impedance is modeled as a capacitance to consider the fringing at the end of the SE. This model proved to lead to better simulation results with respect to an ideal infinite impedance, which causes the presence of a peak in the final part of (an effect that clearly compensates the unmodeled fringing capacitance).
The complete list of the free parameters of the model, subject to the optimization process, is listed here.
Primary parameters of the coaxial cable: .
Primary parameters of the SE: .
Vector of 100 amplitudes of the Gaussian pulses composing the capacitance profile .
Termination capacitance: .
Determining and handling an analytical expression of the gradient of the objective function is an unrealistic task due to the complexity of the frequency-dependent model. Given also the large dimensionality of the parameters vector, a random search method with adaptive step size is effectively used for the optimization [
31]. Discussing in detail the numerical optimization algorithm is beyond the scope of this work. The results, instead, deserve a careful analysis, presented in the next section.
2.6. Water-Leak Detection and Localization
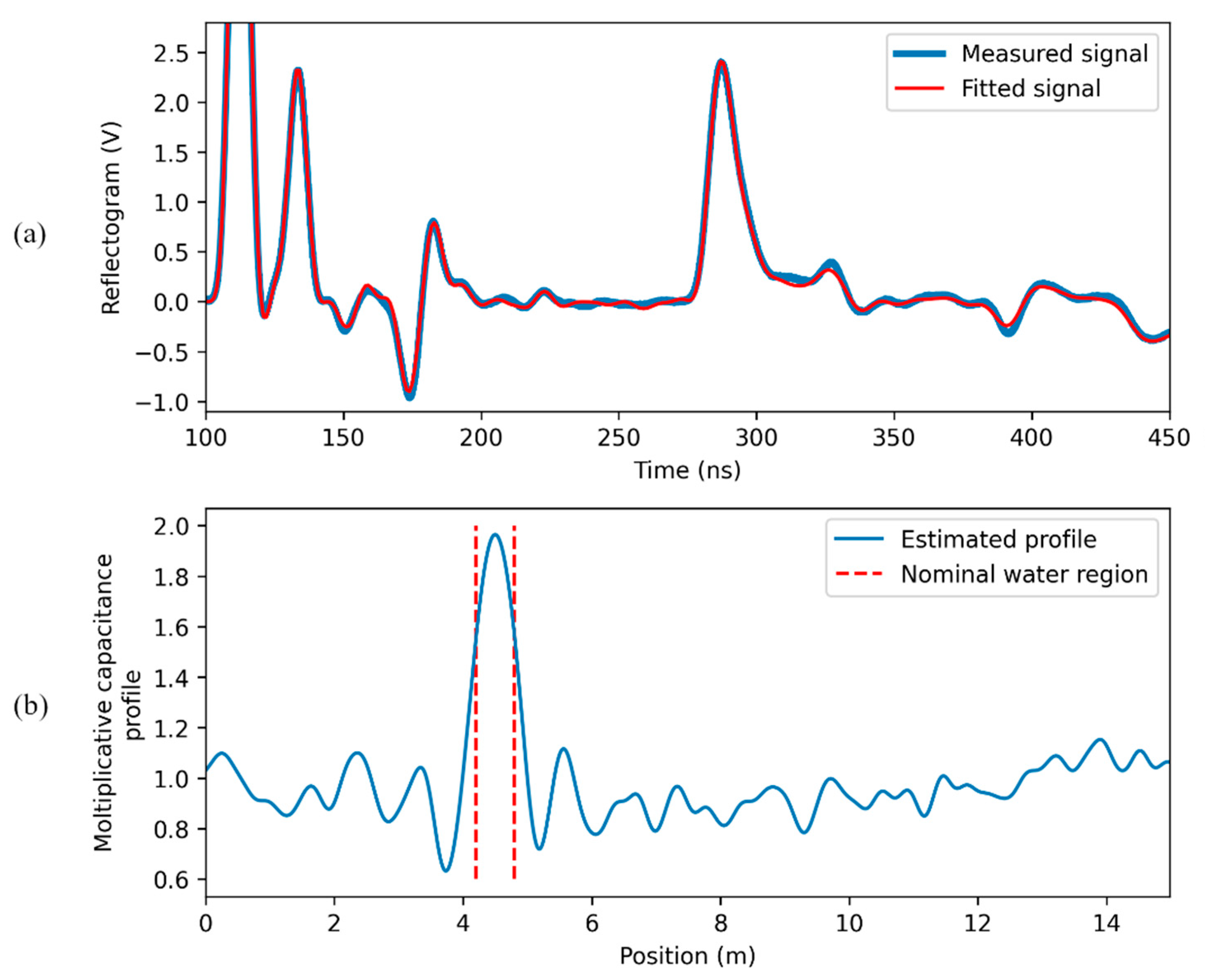
There are two ways to detect and localize water leaks from the estimated capacitance profile . The first does not use any reference reflectogram but is more prone to errors and ambiguities in interpreting the profile. The second must use the reference reflectogram but gives automatic and univocal results.
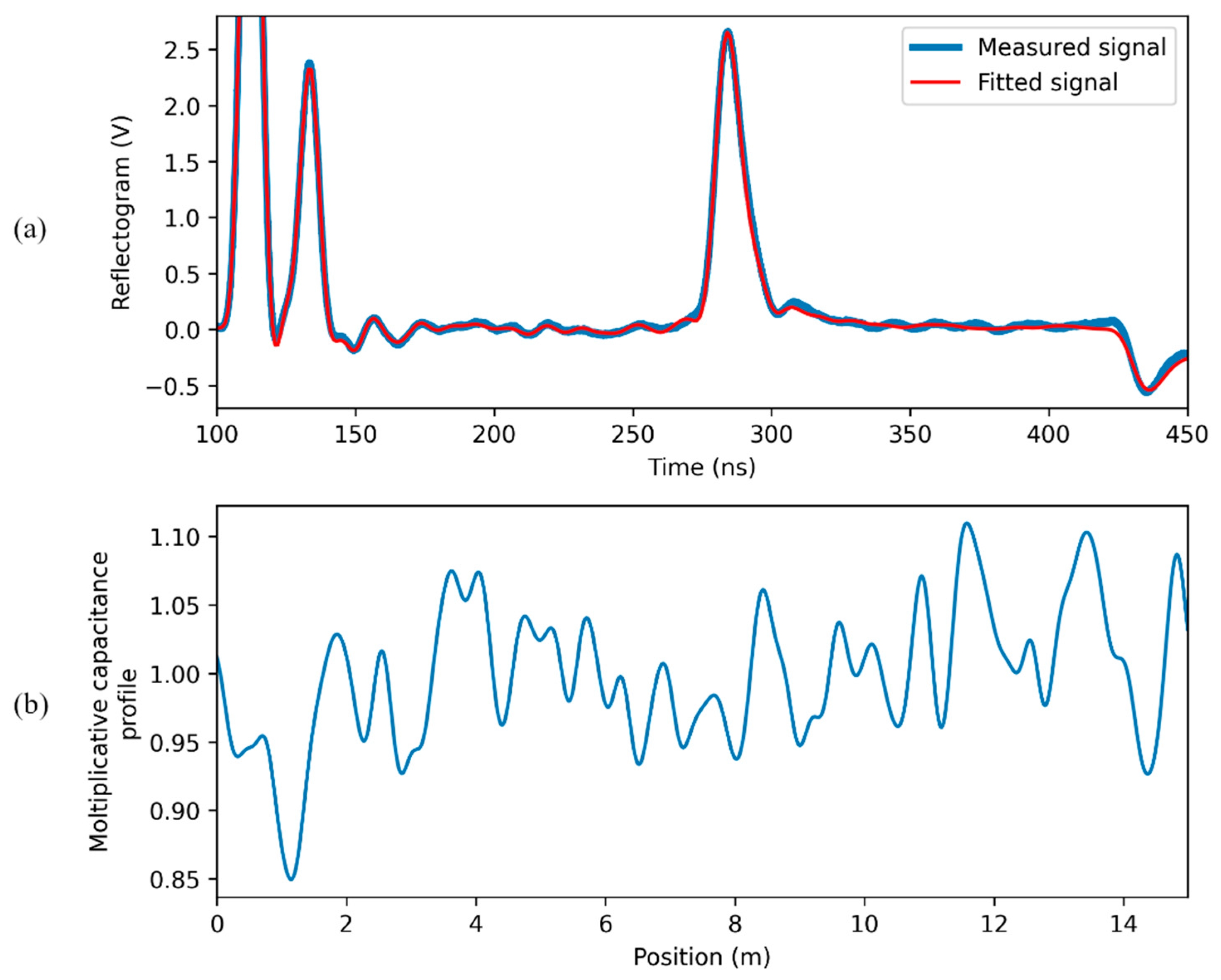
When reflections due to the presence of water are strong, like in
Figure 4b, water leaks can be directly localized as prominent peaks in the estimated capacitance profile
. We refer conventionally to this procedure as “direct water-leak detection”.
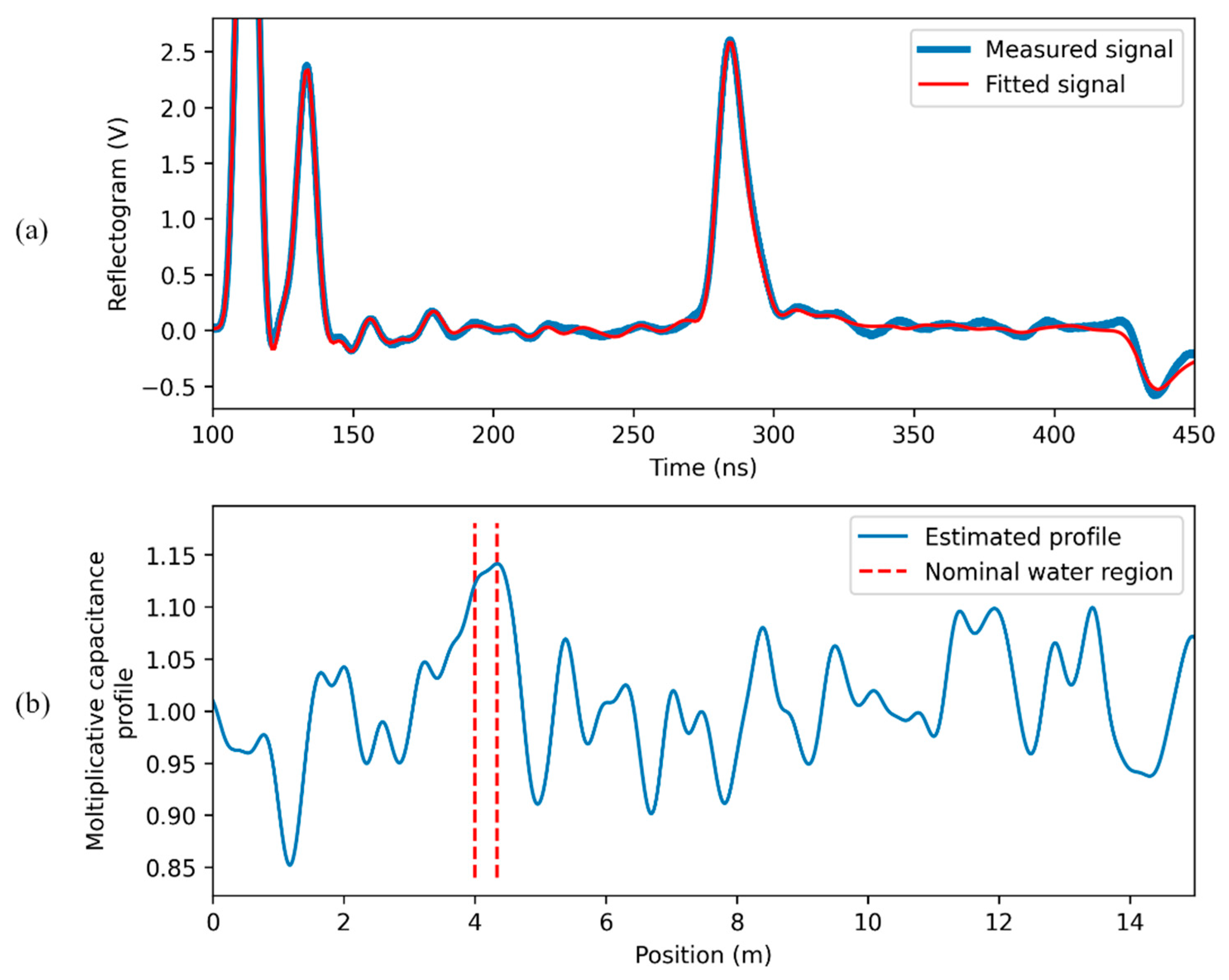
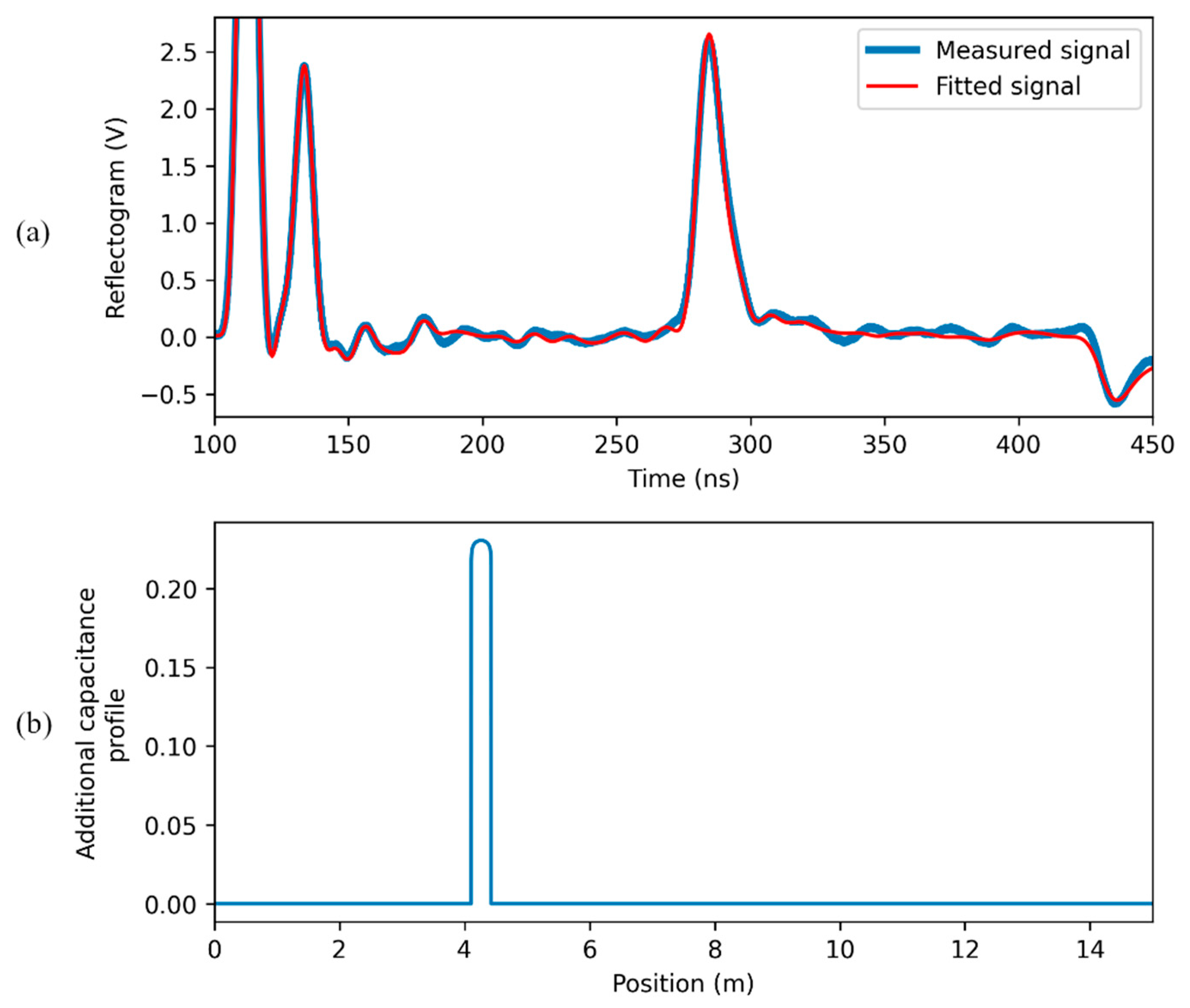
When reflections due to the presence of water are weak, like in
Figure 4c,d, the estimated profile does not provide a solid identification of leaks. In these cases, the reference signal measured with the same setup but without water (
Figure 4a) is exploited in the following way. We refer conventionally to this procedure as “water-leak detection after calibration”.
A first model identification is performed on the reference reflectogram. All the model parameters are determined. This is the calibration phase, which gives the profile (with ).
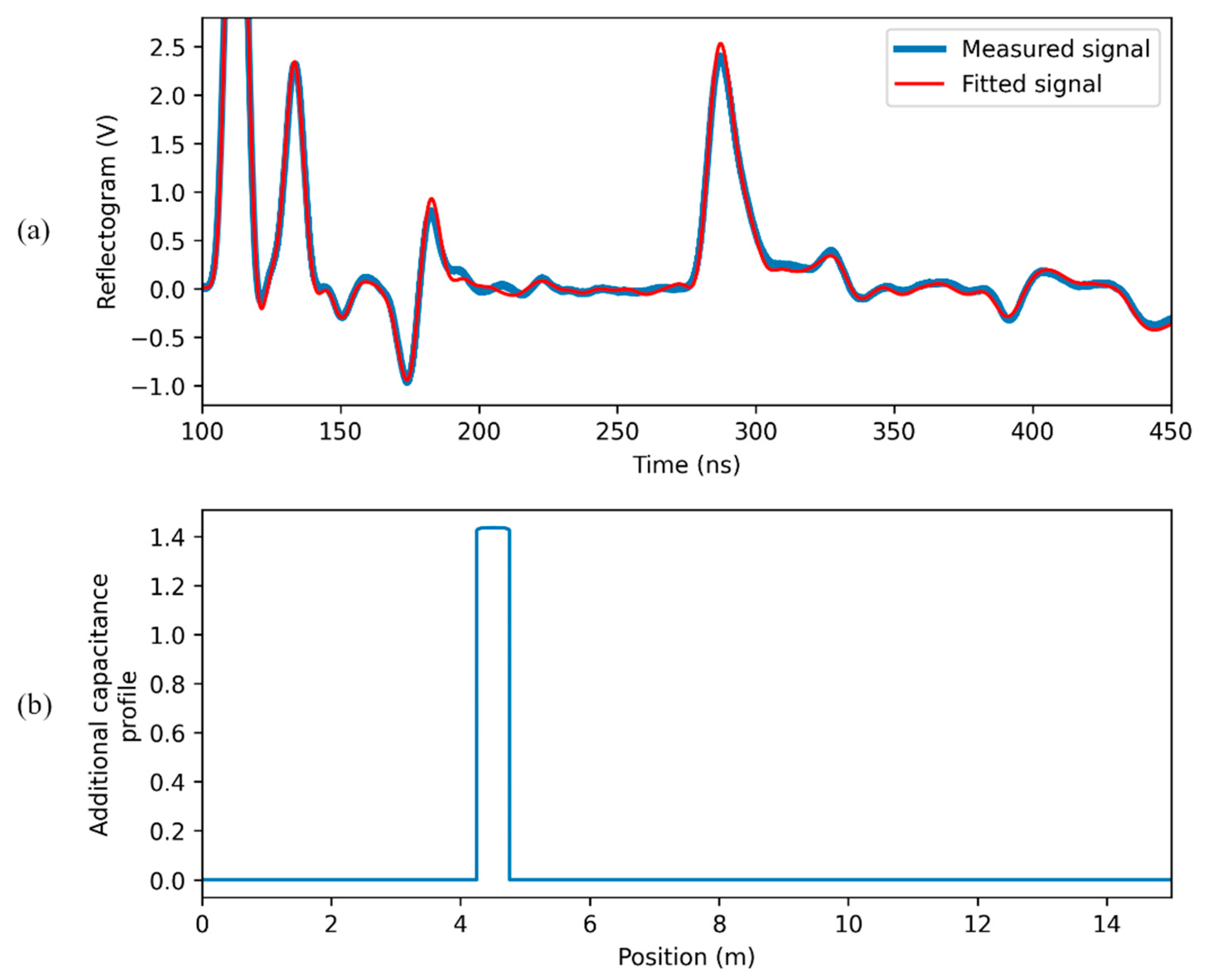
A second model identification is performed on measurement reflectogram. In this case, the formerly determined parameters are fixed. The fitting is obtained by acting only on the parameters of an additional capacitance profile , i.e., assuming the capacitance profile . This is the measurement phase.
The additional capacitance profile associated with a water leak is modeled as a function of the form:
where
is the beta probability density function computed in
, with form parameters
and
(see
Figure 6). In this way,
is non-zero in the interval
(it begins at
and has a width
);
is a magnitude factor;
is a form factor. Depending on the value of
, model (9) assumes different shapes, from a rectangular pulse to a bell-shaped pulse, as depicted in
Figure 6.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}