


Improved Bidirectional RRT* Algorithm for Robot Path Planning



Abstract
1. Introduction
2. Relate Work
2.1. Principle of RRT*
2.2. Principle of Bidirectional RRT*
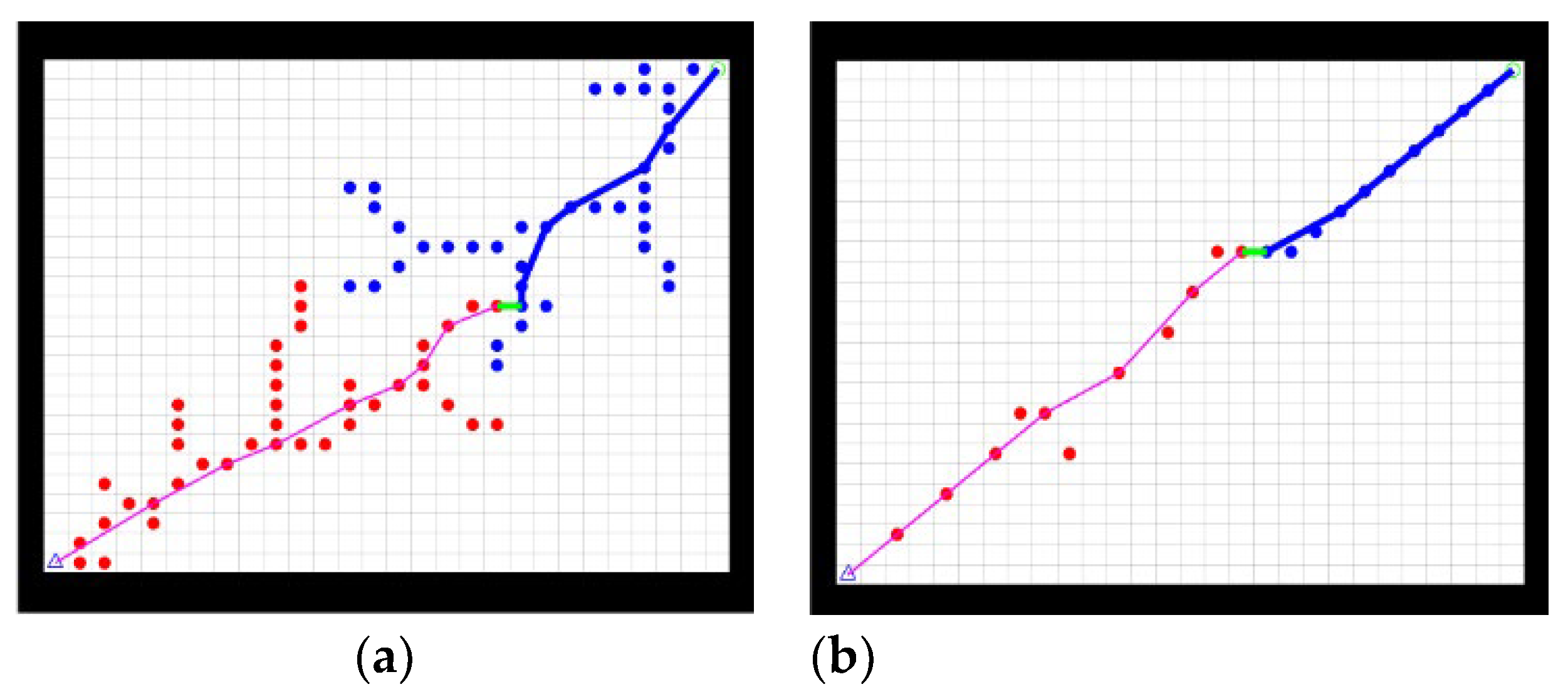
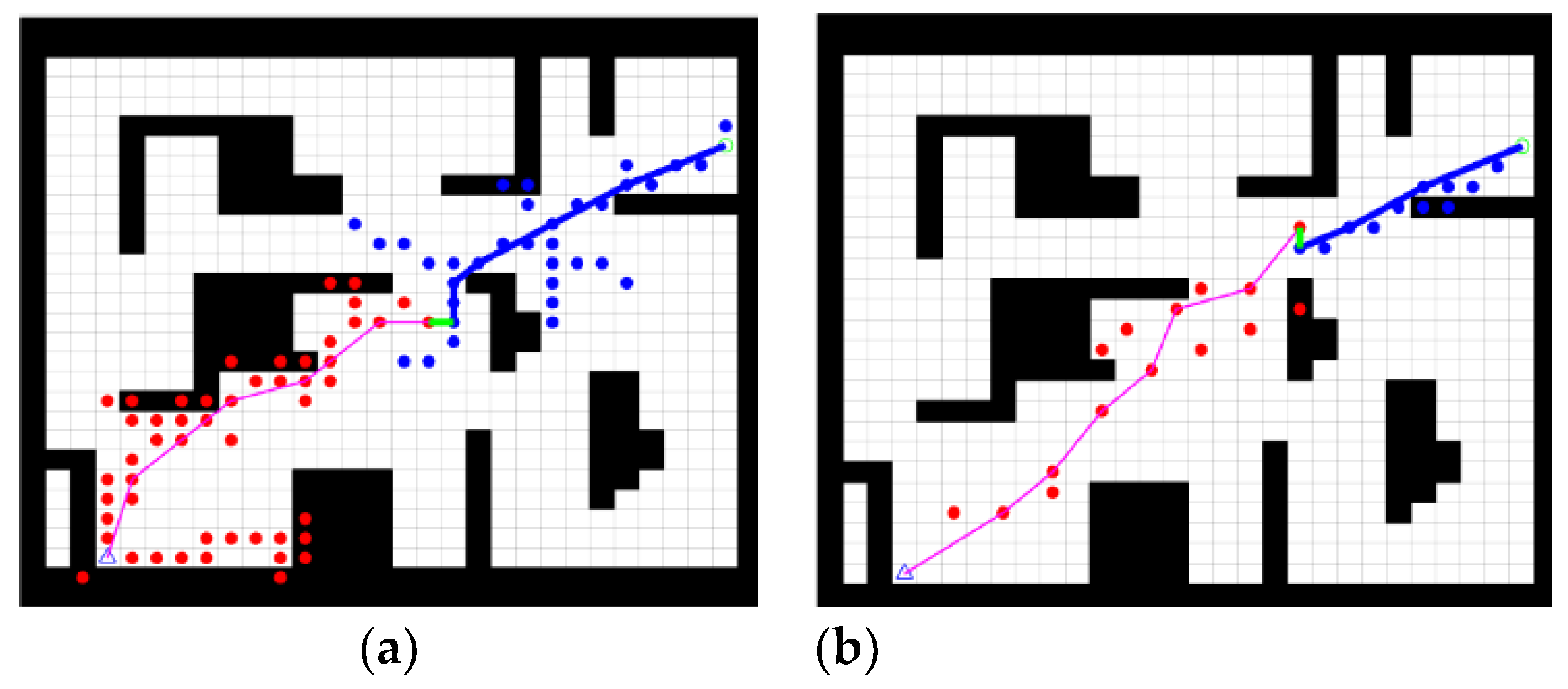
3. Improved Bidirectional RRT* Algorithm
3.1. Adding Artificial Potential Field Ideas
3.2. Adjusting the Sampling Direction of a Random Tree Growing at a Target Point
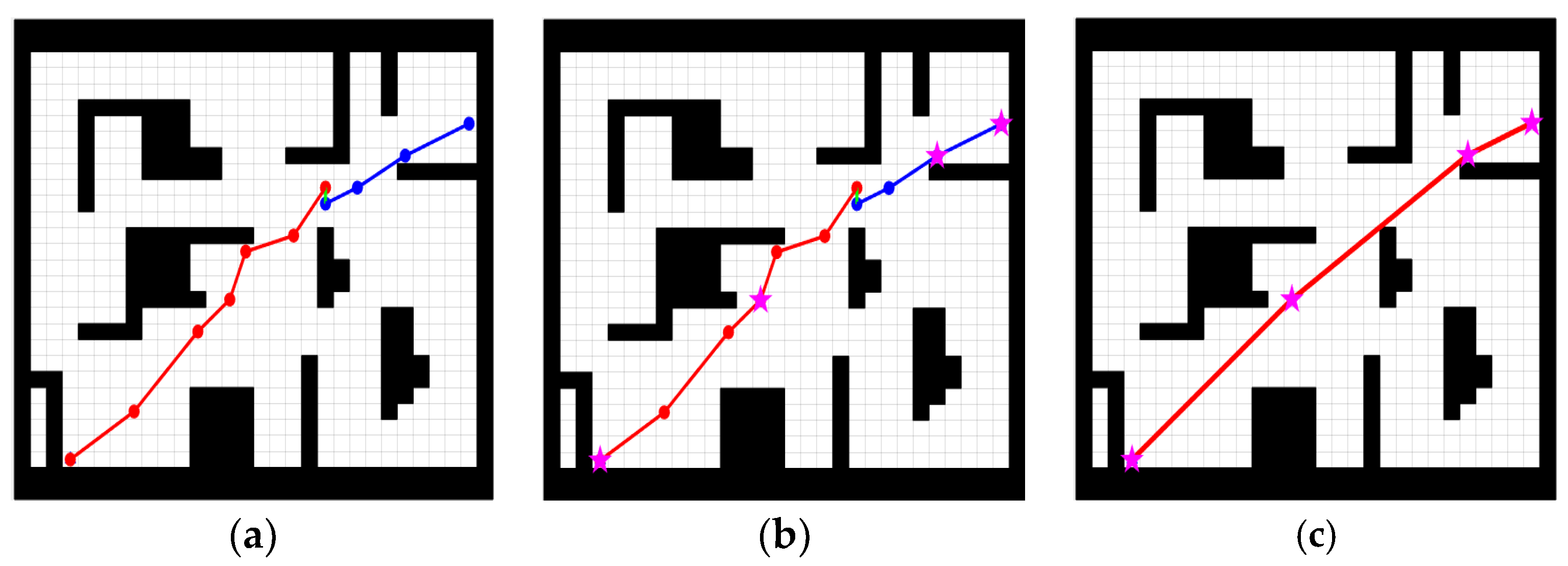
3.3. Path Optimization
- Put all the nodes into the set in order.
- Connect the nodes in the set one by one from the starting node until the connection between the node with passes the obstacle and is the key point in the set. At this point, starting from , connect the remaining nodes in turn until all the key points are found.
- Connect the key points and target points in sequence from the starting point to plan the new path, as shown in Figure 8.
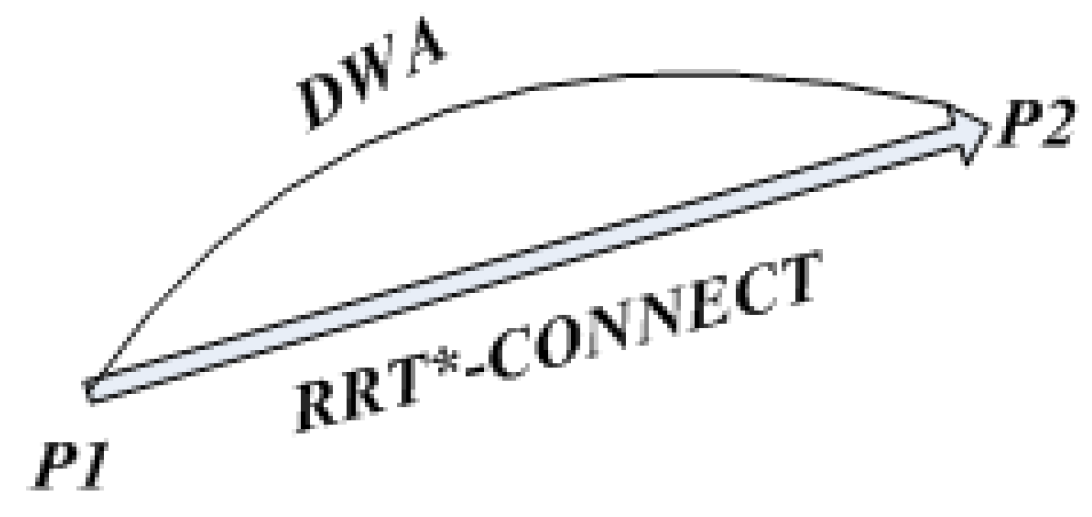
4. The Incorporation of the Dynamic Window Method
4.1. Robot Kinematic Models
4.2. Velocity Sampling
5. Fusion Algorithm
6. Simulation Verification
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Panda, M.; Das, B.; Subudhi, B.; Pati, B.B. A Comprehensive Review of Path Planning Algorithms for Autonomous Underwater Vehicles. Int. J. Autom. Comput. 2020, 17, 321–352. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Wang, D.; Zhang, Z. Mission-oriented cooperative 3D path planning for modular solar-powered aircraft with energy optimization. Chin. J. Aeronaut. 2022, 35, 98–109. [Google Scholar] [CrossRef]
- Chen, Y.; Bai, G.; Zhan, Y.; Hu, X.; Liu, J. Path Planning and Obstacle Avoiding of the USV Based on Improved ACO-APF Hybrid Algorithm with Adaptive Early-Warning. IEEE Access 2021, 9, 40728–40742. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Yang, S. Ant Colony Optimization with Immigrants Schemes in Dynamic Environments. Int. Conf. Parallel Probl. Solving Nat. 2010, 6239, 371–380. [Google Scholar] [CrossRef]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 172988142096226. [Google Scholar] [CrossRef]
- Xie, L.; Henkel, C.; Stol, K.; Xu, W. Power-minimization and energy-reduction autonomous navigation of an omnidirectional Mecanum robot via the dynamic window approach local trajectory planning. Int. J. Adv. Robot. Syst. 2018, 15, 172988141875456. [Google Scholar] [CrossRef]
- Yan, Z.; Hao, B.; Zhang, W.; Yang, S.X. Dubins-RRT Path Planning and Heading-Vector Control Guidance for a UUV Recovery. Int. J. Robot. Autom. 2016, 31, 251–262. [Google Scholar] [CrossRef]
- Jeong, I.-B.; Lee, S.-J.; Kim, J.-H. Quick-RRT*: Triangular inequality-based implementation of RRT* with improved initial solution and convergence rate. Expert Syst. Appl. 2019, 123, 82–90. [Google Scholar] [CrossRef]
- Mashayekhi, R.; Idris, M.Y.I.; Anisi, M.H.; Ahmedy, I.; Ali, I. Informed RRT*-Connect: An Asymptotically Optimal Single-Query Path Planning Method. IEEE Access 2020, 8, 19842–19852. [Google Scholar] [CrossRef]
- Wang, J.; Meng, M.Q.-H.; Khatib, O. EB-RRT: Optimal Motion Planning for Mobile Robots. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2063–2073. [Google Scholar] [CrossRef]
- Kang, J.-G.; Lim, D.-W.; Choi, Y.-S.; Jang, W.-J.; Jung, J.-W. Improved RRT-Connect Algorithm Based on Triangular Inequality for Robot Path Planning. Sensors 2021, 21, 333. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Zheng, J.; Yu, J. Path Planning of Industrial Robot Based on Improved RRT Algorithm in Complex Environments. IEEE Access 2018, 6, 53296–53306. [Google Scholar] [CrossRef]
- Noreen, I.; Khan, A.; Ryu, H.; Doh, N.L.; Habib, Z. Optimal path planning in cluttered environment using RRT*-AB. Intell. Serv. Robot. 2018, 11, 41–52. [Google Scholar] [CrossRef]
- Qi, J.; Yang, H.; Sun, H. MOD-RRT*: A Sampling-Based Algorithm for Robot Path Planning in Dynamic Environment. IEEE Trans. Ind. Electron. 2021, 68, 7244–7251. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.-H. Neural RRT*: Learning-Based Optimal Path Planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Wang, W.; Zuo, L.; Xu, X. A Learning-based Multi-RRT Approach for Robot Path Planning in Narrow Passages. J. Intell. Robot. Syst. 2018, 90, 81–100. [Google Scholar] [CrossRef]
- Qie, T.; Wang, W.; Yang, C.; Li, Y.; Liu, W.; Xiang, C. A path planning algorithm for autonomous flying vehicles in cross-country environments with a novel TF-RRT∗ method. Green Energy Intell. Transp. 2022, 1, 100026. [Google Scholar] [CrossRef]
- Guo, J.; Xia, W.; Hu, X.; Ma, H. Feedback RRT* algorithm for UAV path planning in a hostile environment. Comput. Ind. Eng. 2022, 174, 108771. [Google Scholar] [CrossRef]
- Yang, W.; Wu, P.; Zhou, X.; Lv, H.; Liu, X.; Zhang, G.; Hou, Z.; Wang, W. Improved Artificial Potential Field and Dynamic Window Method for Amphibious Robot Fish Path Planning. Appl. Sci. 2021, 11, 2114. [Google Scholar] [CrossRef]
- Maroti, A.; Szaloki, D.; Kiss, D.; Tevesz, G. Investigation of Dynamic Window based navigation algorithms on a real robot. In Proceedings of the 2013 IEEE 11th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 31 January–2 February 2013; pp. 95–100. [Google Scholar] [CrossRef]
- Liu, L.; Yao, J.; He, D.; Chen, J.; Huang, J.; Xu, H.; Wang, B.; Guo, J. Global Dynamic Path Planning Fusion Algorithm Combining Jump-A* Algorithm and Dynamic Window Approach. IEEE Access 2021, 9, 19632–19638. [Google Scholar] [CrossRef]
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment. J. Intell. Robot. Syst. 2020, 99, 65–77. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path-Planning Algorithms | Path Length | Number of Path Inflection Points |
|---|---|---|
| Improved bidirectional RRT* | 35.4754 | 9 |
| After optimizing the path | 32.8269 | 2 |
| Path-Planning Algorithms | Path Length | Planning Time(s) | Number of Path Inflection Points |
|---|---|---|---|
| Traditional RRT | 39.2132 | 1.3745 | 25 |
| Traditional A* | 33.6985 | 0.4971 | 2 |
| Traditional bidirectional RRT* | 35.0956 | 0.1178 | 10 |
| Improved bidirectional RRT* | 32.9230 | 0.0513 | 1 |
| Fusion algorithm | 32.7300 | 377.0923 | none |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, P.; Wang, X.; Liu, X.; Wang, Y.; Zhai, Z.; Ma, X. Improved Bidirectional RRT* Algorithm for Robot Path Planning. Sensors 2023, 23, 1041. https://doi.org/10.3390/s23021041
Xin P, Wang X, Liu X, Wang Y, Zhai Z, Ma X. Improved Bidirectional RRT* Algorithm for Robot Path Planning. Sensors. 2023; 23(2):1041. https://doi.org/10.3390/s23021041
Chicago/Turabian StyleXin, Peng, Xiaomin Wang, Xiaoli Liu, Yanhui Wang, Zhibo Zhai, and Xiqing Ma. 2023. "Improved Bidirectional RRT* Algorithm for Robot Path Planning" Sensors 23, no. 2: 1041. https://doi.org/10.3390/s23021041
APA StyleXin, P., Wang, X., Liu, X., Wang, Y., Zhai, Z., & Ma, X. (2023). Improved Bidirectional RRT* Algorithm for Robot Path Planning. Sensors, 23(2), 1041. https://doi.org/10.3390/s23021041