
A Novel Piecewise Tri-Stable Stochastic Resonance System Driven by Dichotomous Noise


Abstract
1. Introduction
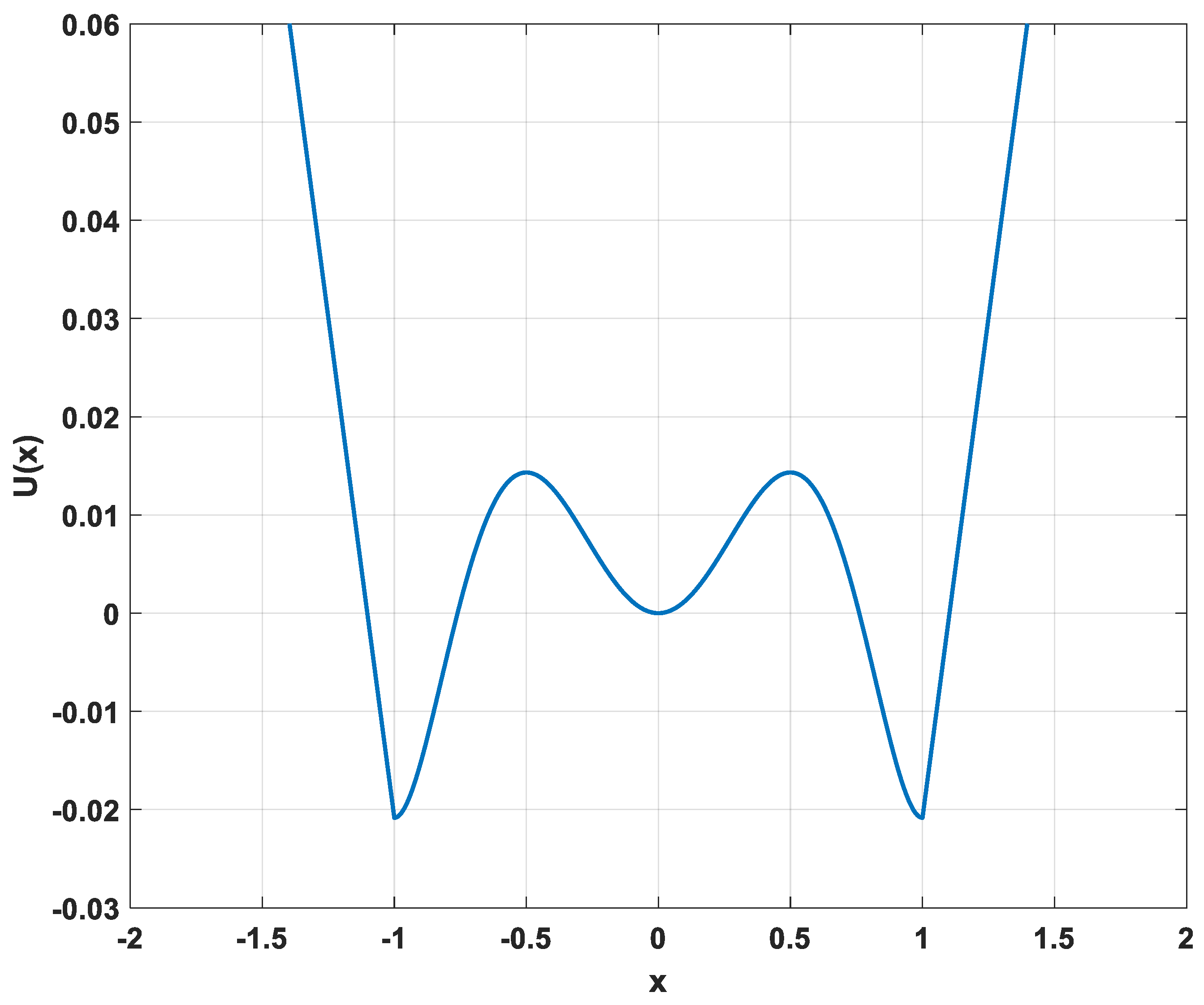
2. The PTSR System and Parameters
2.1. Numerical Simulation
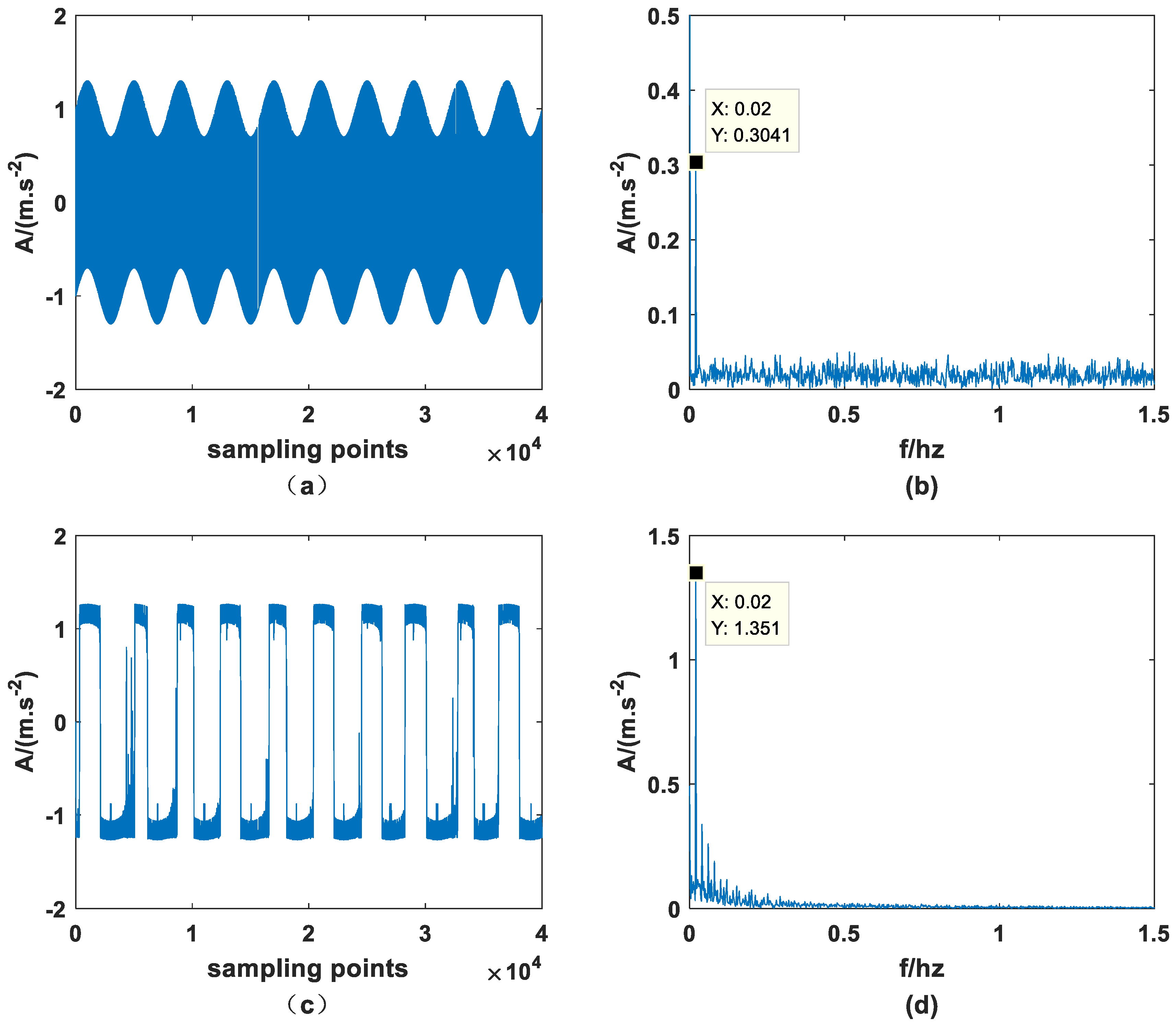
2.2. Verification by Simulation
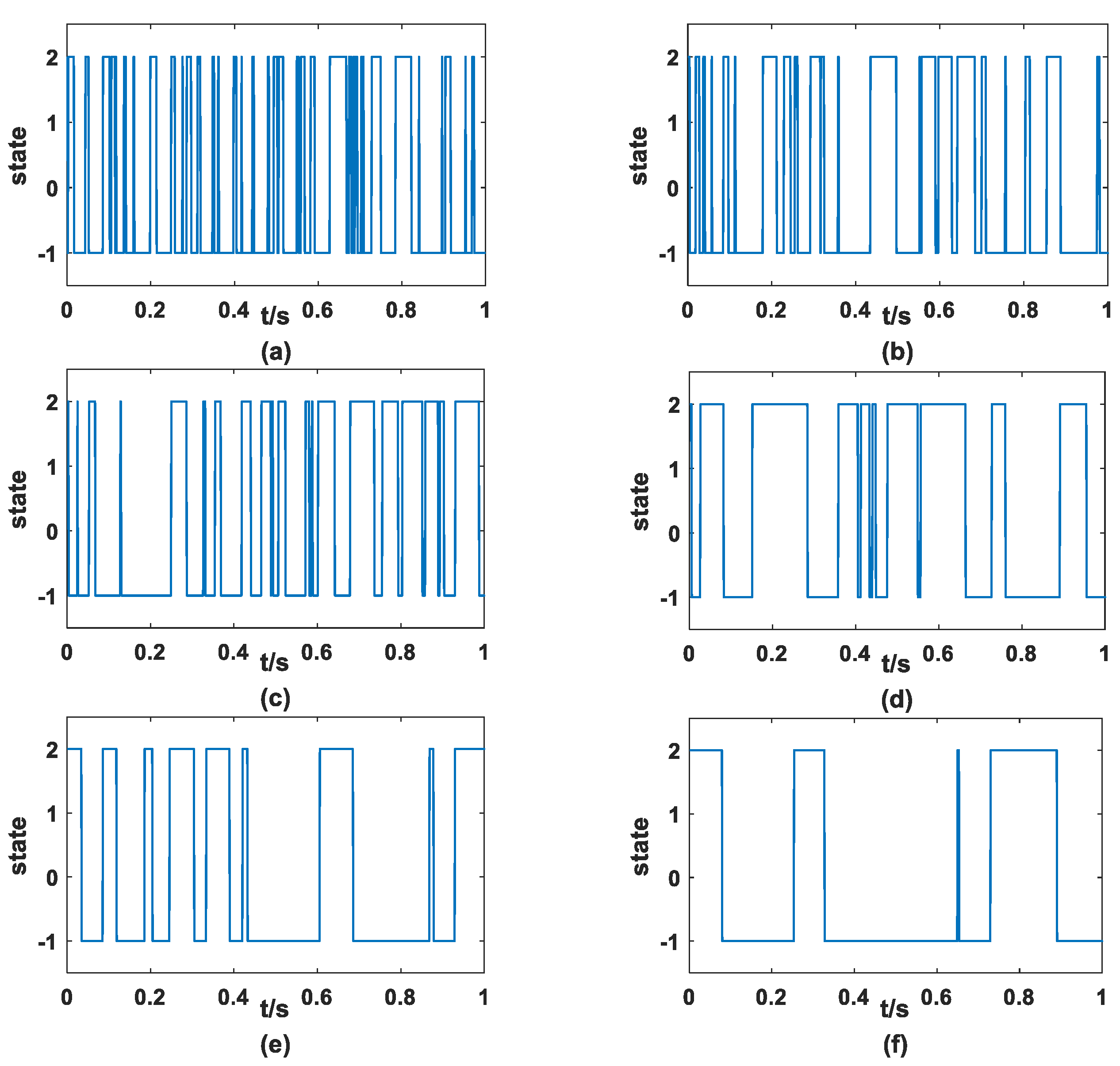
2.3. Dichotomous Noise Drives Different Sr Models
3. SNR-GM of PTSR System Driven by Dichotomous Noise
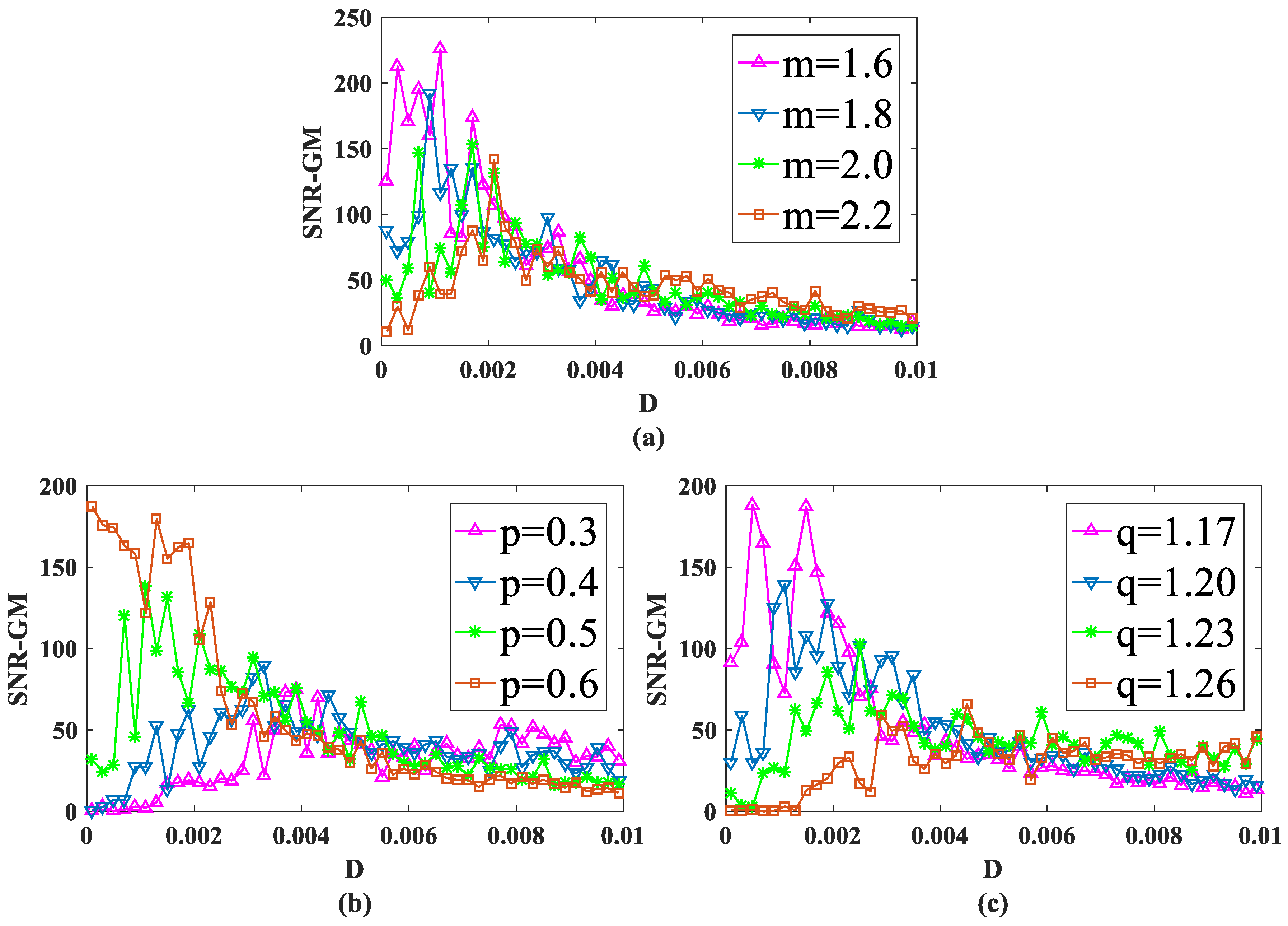
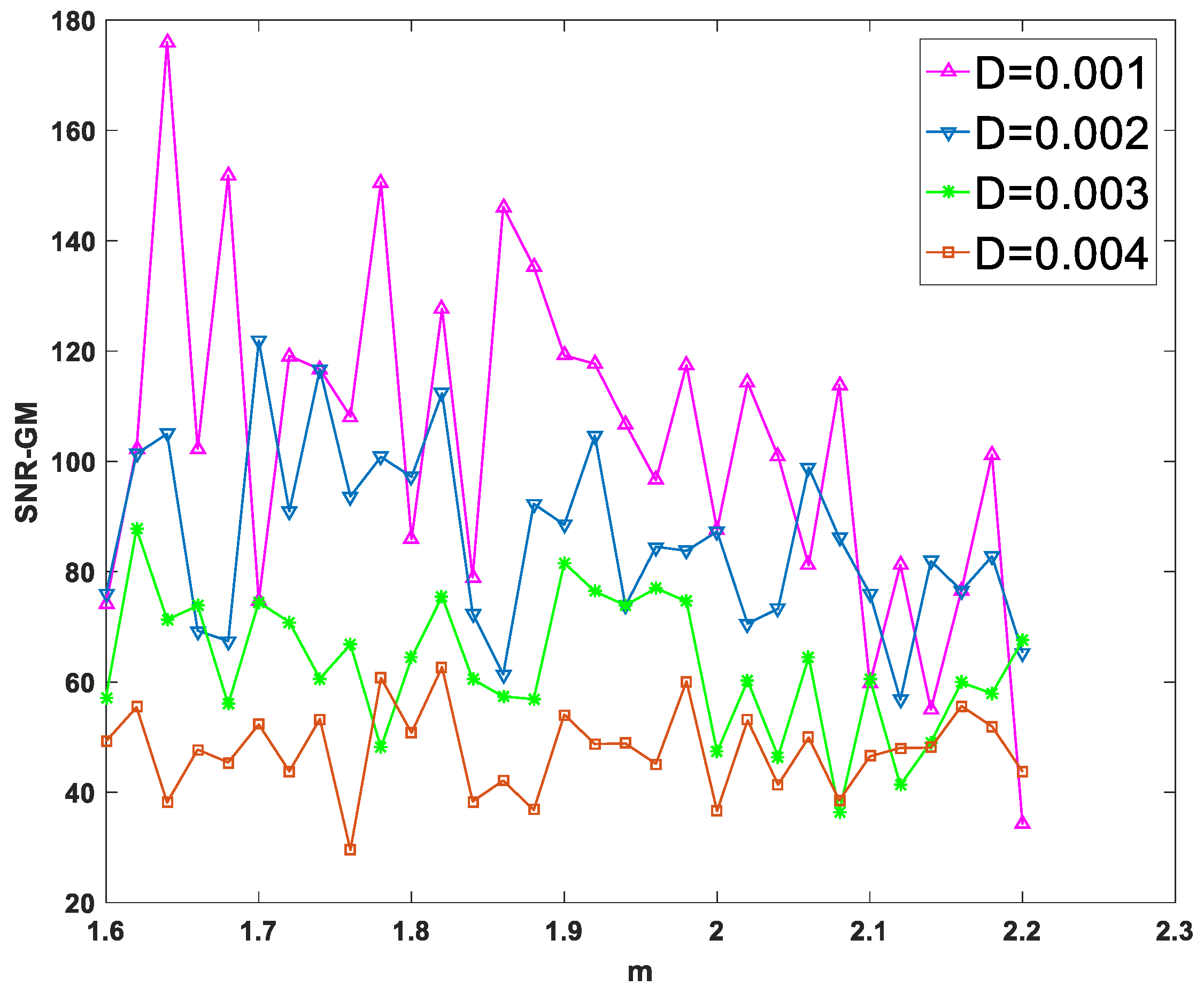
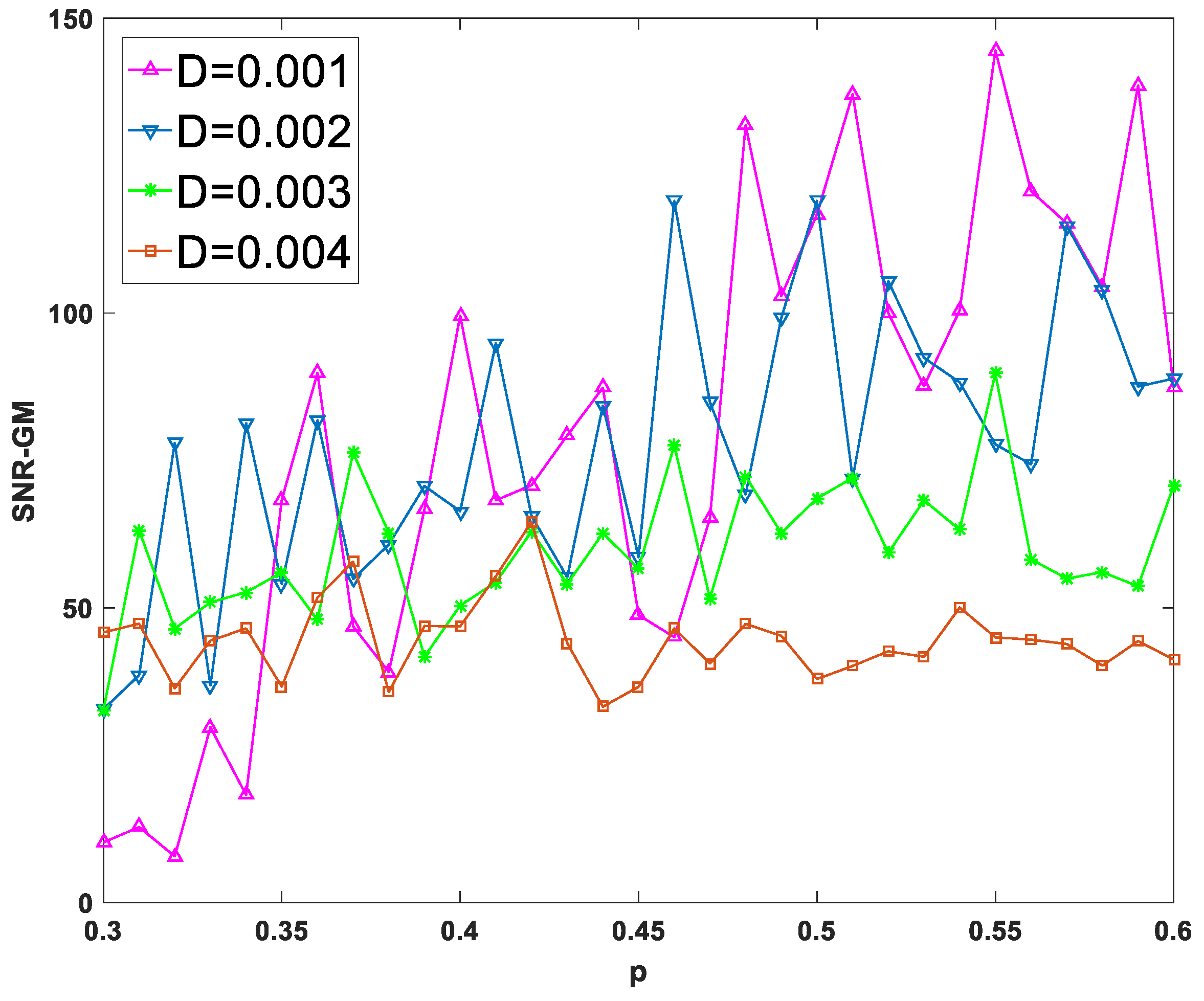
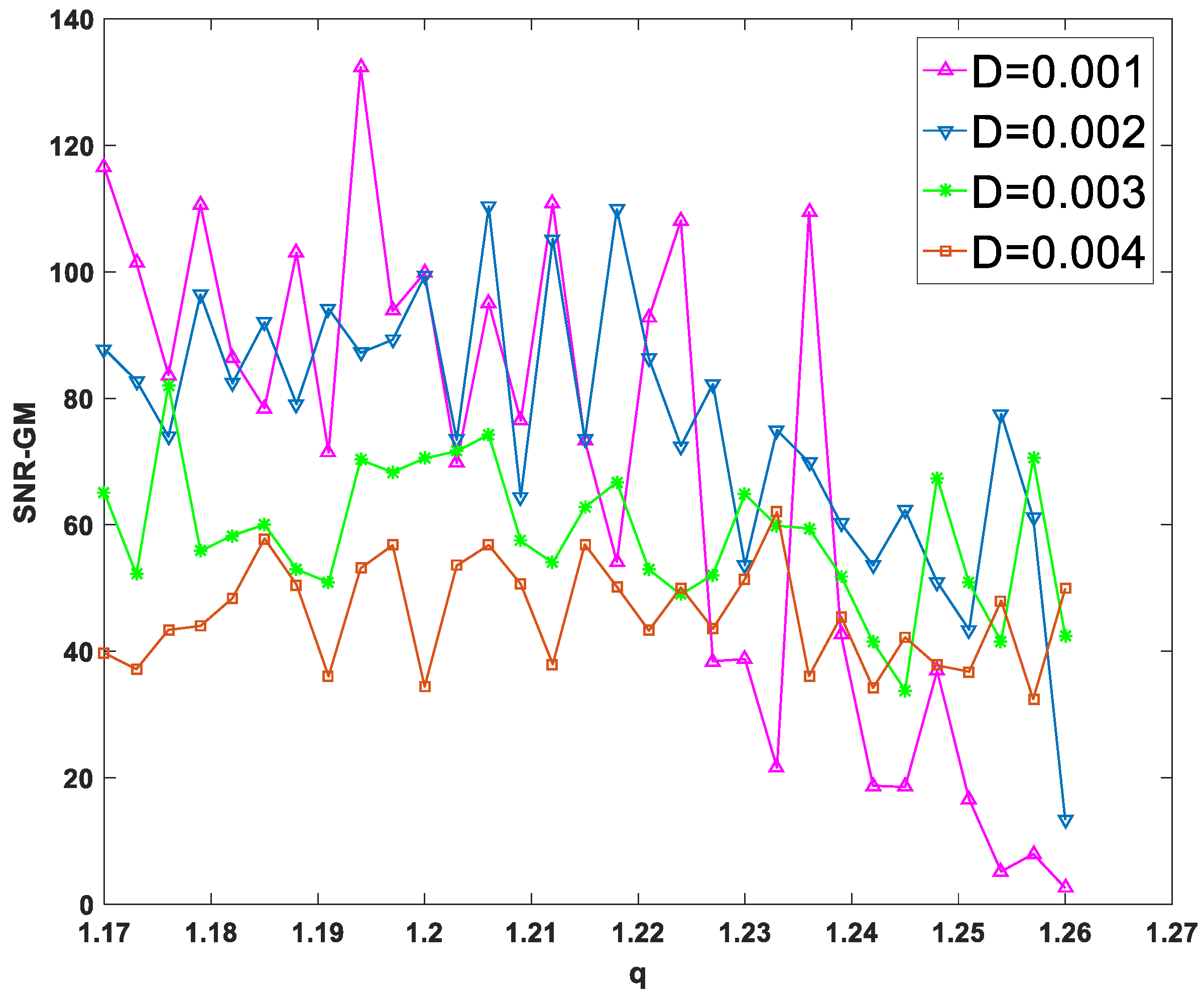
3.1. Impact of System Parameters , , and
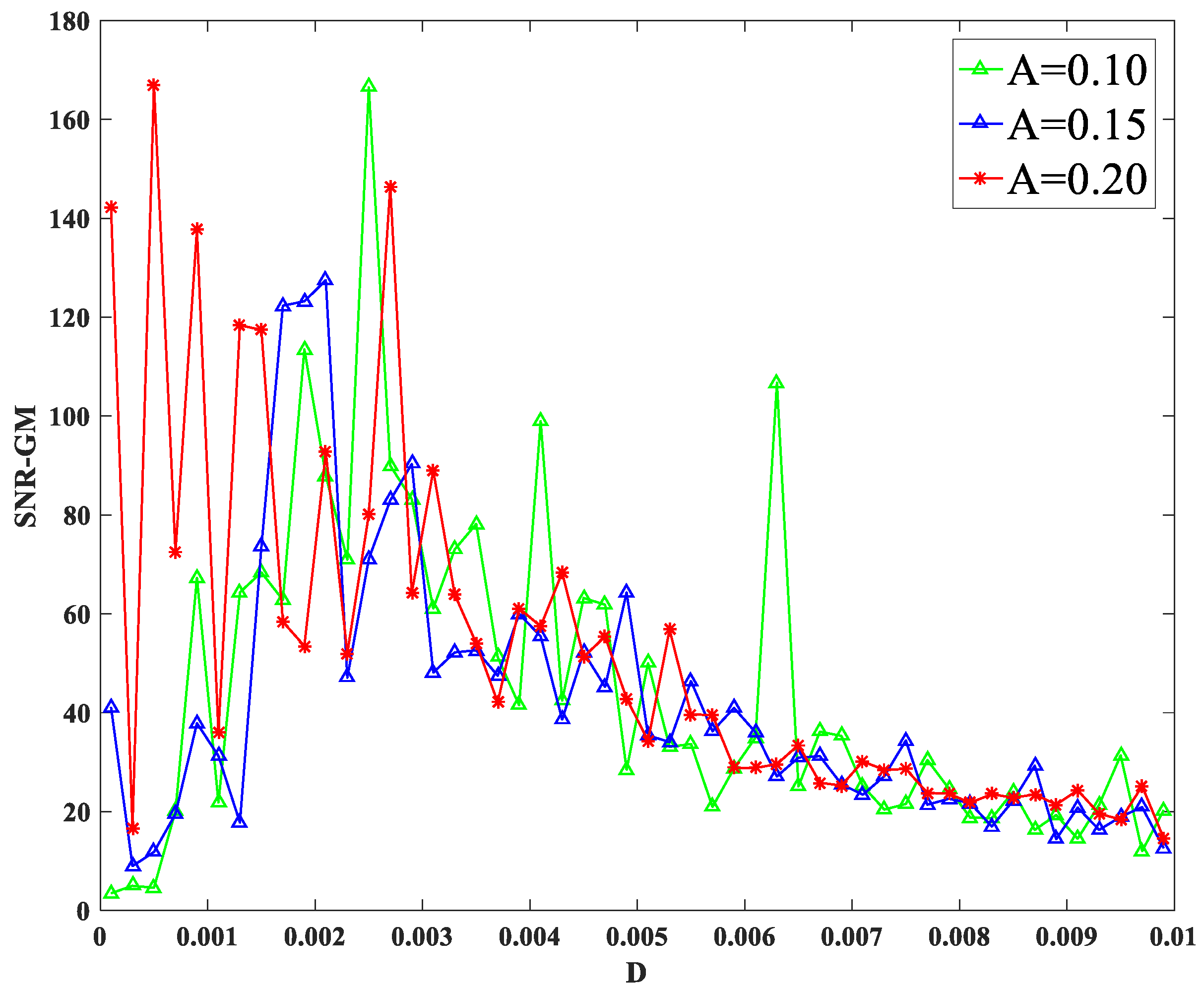
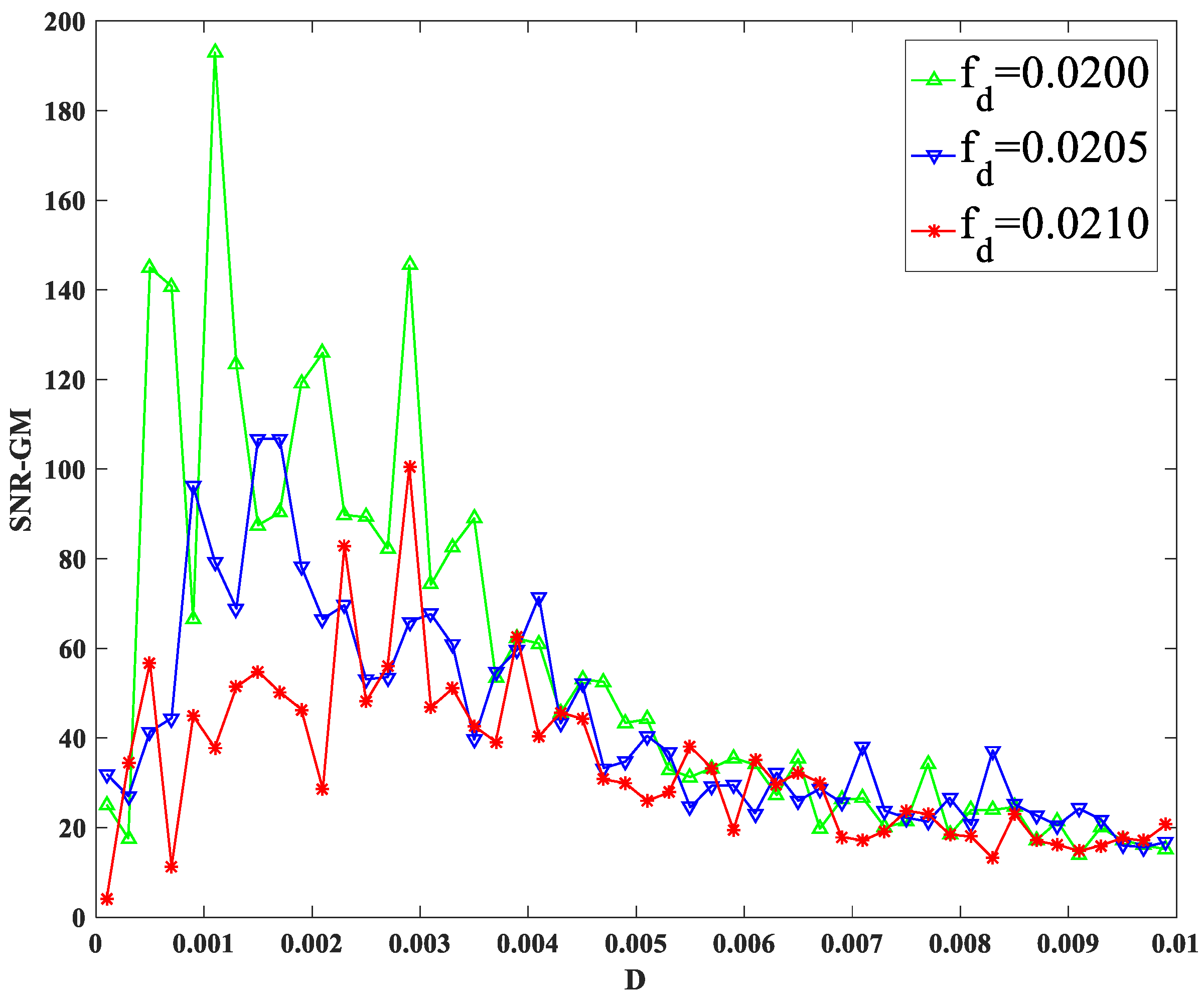
3.2. Impact of Amplitude and Characteristic Frequency on SNR-GM
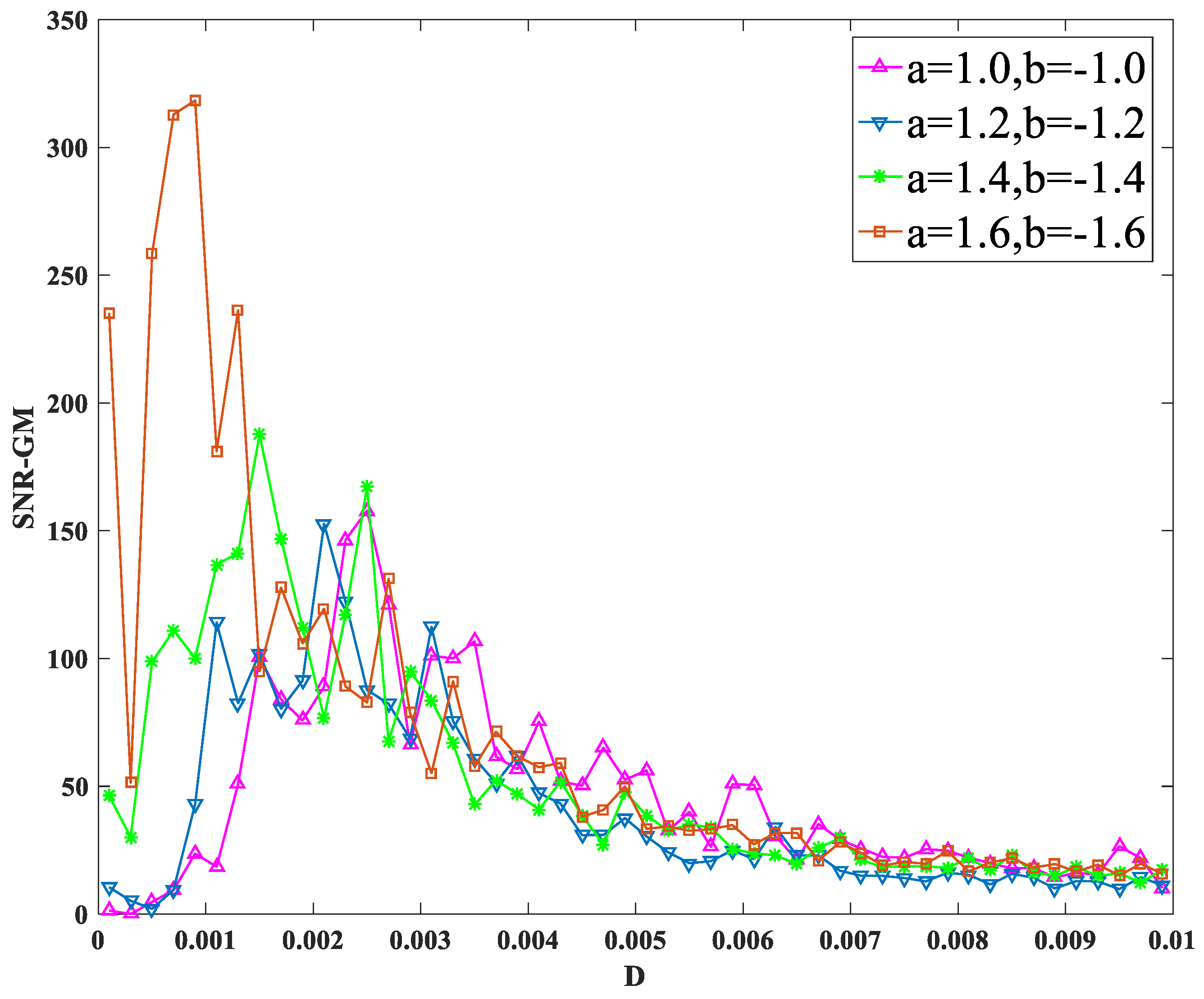
3.3. Impact of Dichotomous Noise Parameters a and b on SNR-GM
4. Performance of the PTSR System Driven by Dichotomous Noise Compared with Driven by AWGN
5. Discussion
6. Conclusions
- Dichotomous noise as a driving source can still cause SR phenomena in the PTSR system, and dichotomous noise can transfer energy to periodic signals for signal enhancement.
- Compared with classical bistable SR and standard tri-stable SR, PTSR has higher signal enhancement when dichotomous noise is the driving source.
- PTSR system parameters , periodic signal parameters , and dichotomous noise parameters have an obvious effect on the SNR-GM of the system. The increase in , and cause the SNR-GM to show a downward trend, but the effect of , and is the opposite; amplitude has little influence on the size of SNR-GM but affects the size of optimal .
- PTSR systems have better signal enhancement when they are driven by AWGN, and the range of adapted is relatively small when driven by dichotomous noise.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benzi, R.; Sutera, A.; Vulpiani, A. the mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, 453–457. [Google Scholar] [CrossRef]
- Nobukawa, S.; Shibata, N.; Nishimura, H.; Doho, H. Resonance phenomena controlled by external feedback signals and additive noise in neural systems. Sci. Rep. 2019, 9, 12630. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.F.; Gong, X.L.; Li, Y.W.; Jin, Y.F. Stochastic resonance in periodic potential system with memory damping function. Acta Phys. Sin. 2022, 71, 080501. [Google Scholar] [CrossRef]
- Yang, H.L.; Xu, G.; Wang, H. Effects of magnetic fields on stochastic resonance in Hodgkin-Huxley neuronal network driven by Gaussian noise and non-Gaussian noise. Cogn. Neurodynamics 2022, 16, 707–717. [Google Scholar] [CrossRef] [PubMed]
- Bai, S.Y.; Duan, F.B.; Zhu, J.; Chapeau-Blondeau, F.; Abbott, D. Generalization of stochastic-resonance-based threshold networks with Tikhonov regularization. Phys. Rev. E 2022, 106, L012101. [Google Scholar] [CrossRef]
- Dykman, M.I.; Mcclintock, P.V.E. What can stochastic resonance do? Nature 1998, 391, 344. [Google Scholar] [CrossRef]
- Qiao, Z.J.; Lei, Y.G.; Lin, J.; Jia, F. An adaptive unsaturated bistable stochastic resonance method and its application in mechanical fault diagnosis. Mech. Syst. Signal Process. 2017, 84, 731–746. [Google Scholar] [CrossRef]
- Markina, A.; Muratov, A.; Petrovskii, V. Detection of single molecules using stochastic resonance of bistable oligomers. Nanomaterials 2020, 10, 2519. [Google Scholar] [CrossRef]
- Xu, Y.; Li, J.J.; Feng, J.; Zhang, H.Q. Levy noise-induced stochastic resonance in a bistable system. Eur. Phys. J. B 2013, 86, 198. [Google Scholar] [CrossRef]
- Cui, H.J.; Guan, Y.; Deng, W. Fault Diagnosis Using Cascaded Adaptive Second-Order Tristable Stochastic Resonance and Empirical Mode Decomposition. Appl. Sci. 2021, 11, 11480. [Google Scholar] [CrossRef]
- Yang, J.H.; Yang, C.; Zhuang, X.Z.; Liu, H.G.; Wang, Z.L. Unknown bearing fault diagnosis under time-varying speed conditions and strong noise background. Nonlinear Dynamics 2022, 107, 2177–2193. [Google Scholar] [CrossRef]
- Wang, B.; Gao, F.Y.; Gupta, M.K.; Krolczyk, G.; Gardoni, P.; Li, Z.X. Risk analysis of a flywheel battery gearbox based on optimized stochastic resonance model. J. Energy Storage 2022, 52, 104926. [Google Scholar] [CrossRef]
- Wang, S.; Niu, P.J.; Guo, Y.F.; Wang, F.Z. Early diagnosis of bearing faults using decomposition and reconstruction stochastic resonance system. Measurement 2020, 158, 107709. [Google Scholar] [CrossRef]
- Li, Z.X.; Shi, B.Q. A piecewise nonlinear stochastic resonance method and its application to incipient fault diagnosis of machinery. Chin. J. Phys. 2019, 59, 126–137. [Google Scholar] [CrossRef]
- Jiang, Y.; He, B.; Guo, J.; Lv, P.F. Actuator Weak Fault Diagnosis in Autonomous Underwater Vehicle Based on Tri-Stable Stochastic Resonance. Appl. Sci. 2020, 10, 2048. [Google Scholar] [CrossRef]
- Tang, J.C.; Shi, B.Q. Asymmetric second-order stochastic resonance weak fault feature extraction method. Meas. Control 2020, 53, 788–795. [Google Scholar] [CrossRef]
- Han, D.Y.; Shi, P.M. Study on the mean first-passage time and stochastic resonance of a multi-stable system with colored correlated noises. Chin. J. Phys. 2021, 69, 98–107. [Google Scholar] [CrossRef]
- Qiao, Z.J.; Liu, J.; Ma, X. Double Stochastic Resonance Induced by Varying Potential-well Depth and Width. J. Frankl. Inst. 2021, 358, 2194–2211. [Google Scholar] [CrossRef]
- Xu, P.F.; Jin, Y.F. Stochastic resonance in an asymmetric tristable system driven by correlated noises. Appl. Math. Model. 2020, 77, 408–425. [Google Scholar] [CrossRef]
- Sorokin, V. Blekhman On the stochastic resonance phenomenon in parametrically excited systems. Eur. J. Appl. Math. 2019, 30, 986–1003. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Y.J.; He, L.F. Tri-stable stochastic resonance coupling system driven by dual-input signals and its application in bearing fault detection. Phys. Scr. 2022, 97, 045202. [Google Scholar] [CrossRef]
- Jiao, S.B.; Qiao, X.X.; Lei, S.; Jiang, W. A novel parameter-induced adaptive stochastic resonance system based on composite cmulti-stable potential model. Chin. J. Phys. 2019, 59, 138–152. [Google Scholar] [CrossRef]
- Shi, P.M.; Yuan, D.Z.; Han, D.Y.; Zhang, Y.; Fu, R.R. Stochastic resonance in a time-delayed feedback tristable system and its application in fault diagnosis. J. Sound Vib. 2018, 424, 1–14. [Google Scholar] [CrossRef]
- Yang, S.; Fan, Z.N.; Ren, R.B. The stochastic resonance phenomenon of different noises in underdamped bistable system. Adv. Math. Phys. 2021, 2021, 4614919. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, H.; Zhang, T.Q. Cascaded nonlinear mass fluctuation stochastic resonance system and its application in bearing fault diagnosis. Fluct. Noise Lett. 2021, 20, 2150045. [Google Scholar] [CrossRef]
- Yan, Z.; Guirao, J.; Saeed, T. Analysis of stochastic resonance in coupled oscillator with fractional damping disturbed by polynomial dichotomous noise. Nonlinear Dyn. 2022, 110, 1233–1251. [Google Scholar] [CrossRef]
- Zhao, S.; Shi, P.M.; Han, D.Y. A novel mechanical fault signal feature extraction method based on unsaturated piecewise tri-stable stochastic resonance. Measurement 2021, 168, 108374. [Google Scholar] [CrossRef]
- Barik, D.; Ghosh, P.K.; Ray, D.S. Langevin dynamics with dichotomous noise; direct simulation and applications. J. Stat. Mech. Theory Exp. 2006, 2006, 143–193. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, J.; Zhang, H.Q. Stochastic resonance phenomenon in an underdamped bistable system driven by weak asymmetric dichotomous noise. Nonlinear Dyn. 2012, 70, 531–539. [Google Scholar] [CrossRef]
- Lai, Z.H.; Leng, Y.G. Dynamic response and stochastic resonance of a tri-stable system. Acta Phys. Sinica 2015, 64, 200503. [Google Scholar]
- Wan, P.; Zhan, Y.J.; Li, X.C.; Wang, Y.H. Numerical research of signal-to-noise ratio gain on a monostable stochastic resonance. Acta Phys. Sin. 2011, 60, 040502. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Classical Bistable SR | Standard Tri-Stable SR | PTSR |
| The Amplitude of the Enhanced Signal | 0.9658 | 1.41 | 1.449 |
| Parameters | and | |||||
| The change in SNR-GM | reduce | increase | reduce | The increase or decrease is not obvious, which affects the best matching | reduce | increase |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Shi, P. A Novel Piecewise Tri-Stable Stochastic Resonance System Driven by Dichotomous Noise. Sensors 2023, 23, 1022. https://doi.org/10.3390/s23021022
Zhao S, Shi P. A Novel Piecewise Tri-Stable Stochastic Resonance System Driven by Dichotomous Noise. Sensors. 2023; 23(2):1022. https://doi.org/10.3390/s23021022
Chicago/Turabian StyleZhao, Shuai, and Peiming Shi. 2023. "A Novel Piecewise Tri-Stable Stochastic Resonance System Driven by Dichotomous Noise" Sensors 23, no. 2: 1022. https://doi.org/10.3390/s23021022
APA StyleZhao, S., & Shi, P. (2023). A Novel Piecewise Tri-Stable Stochastic Resonance System Driven by Dichotomous Noise. Sensors, 23(2), 1022. https://doi.org/10.3390/s23021022