

A Smart, Textile-Driven, Soft Exosuit for Spinal Assistance

 , ,
, ,  , ,
, ,  , and
, and 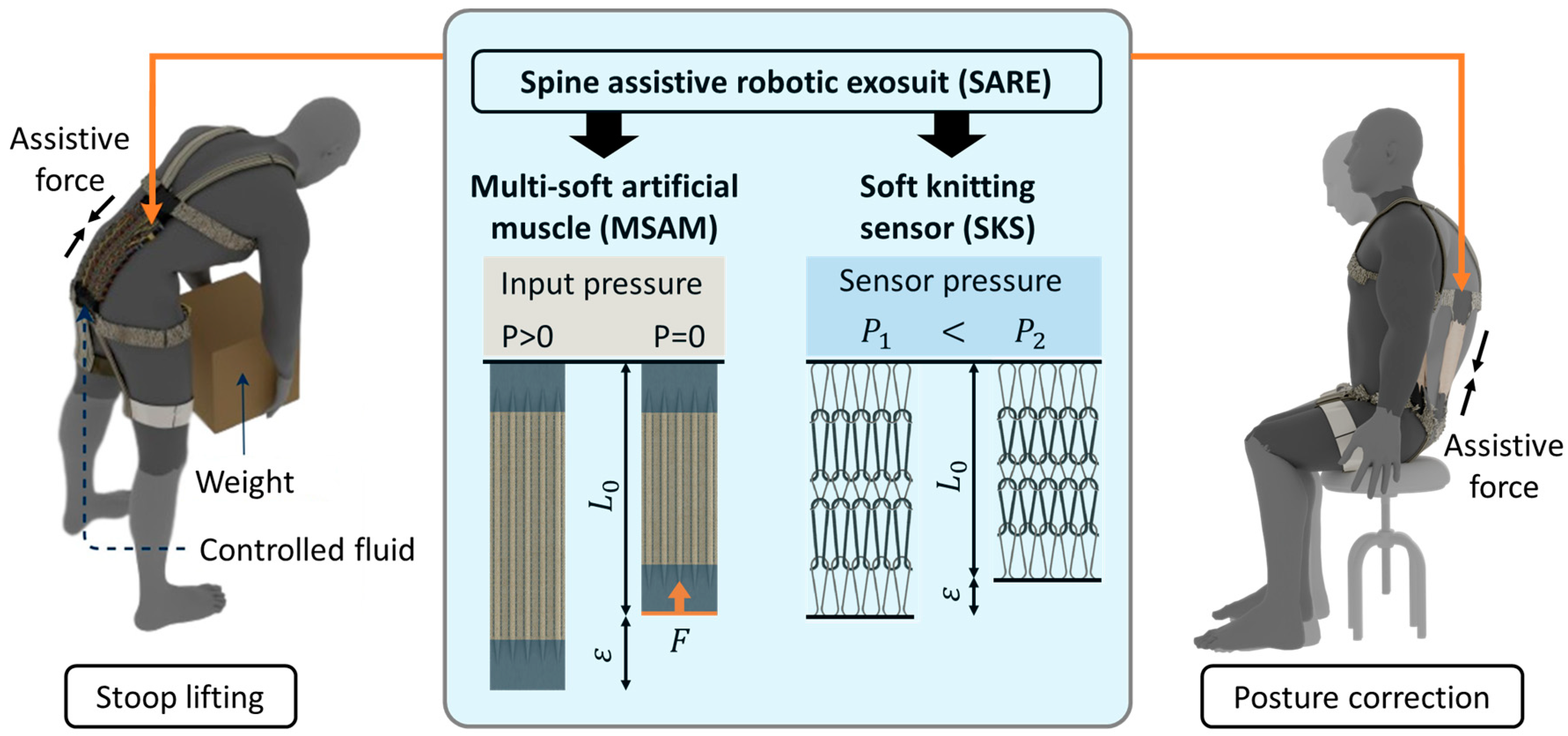{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
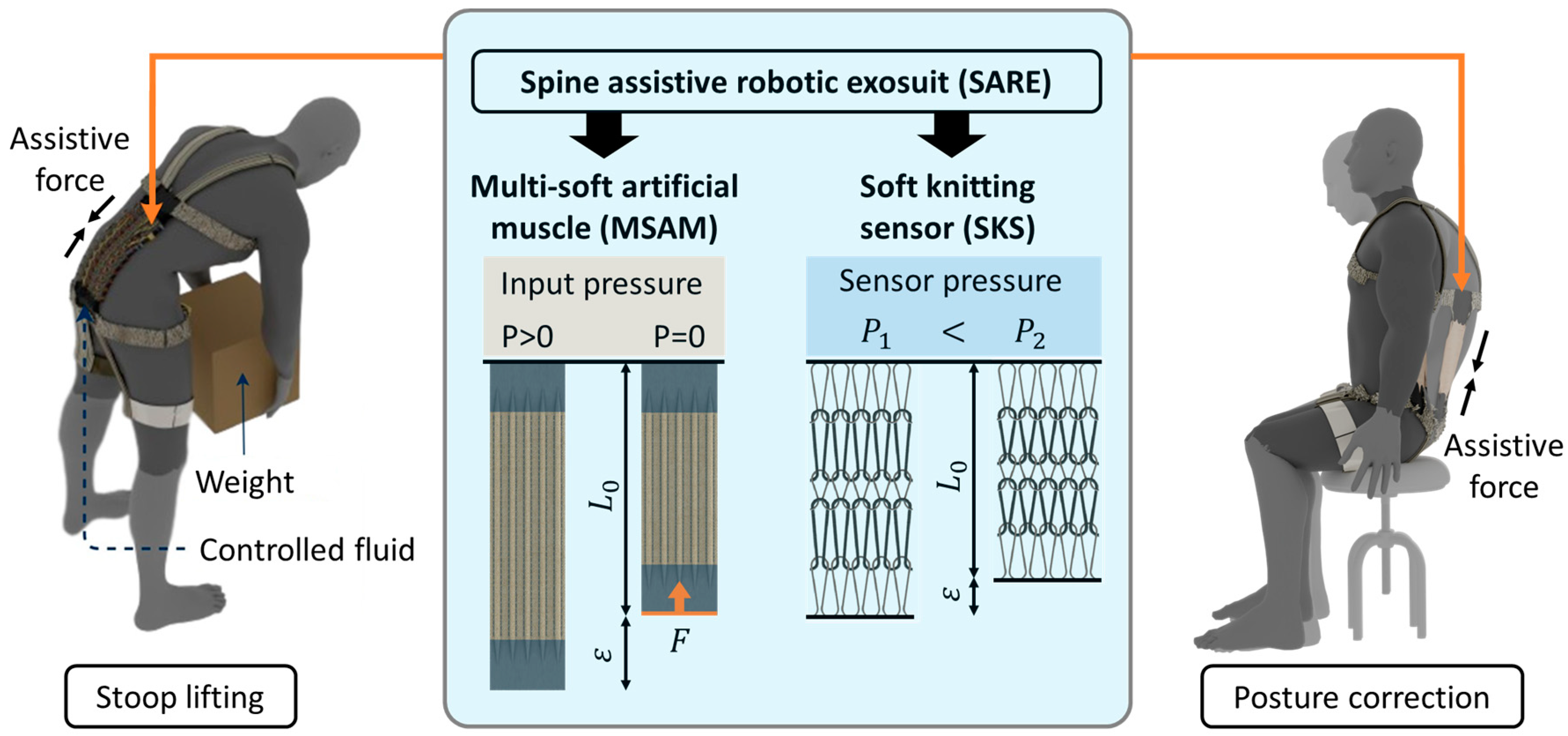
2.1. Mechanical Design
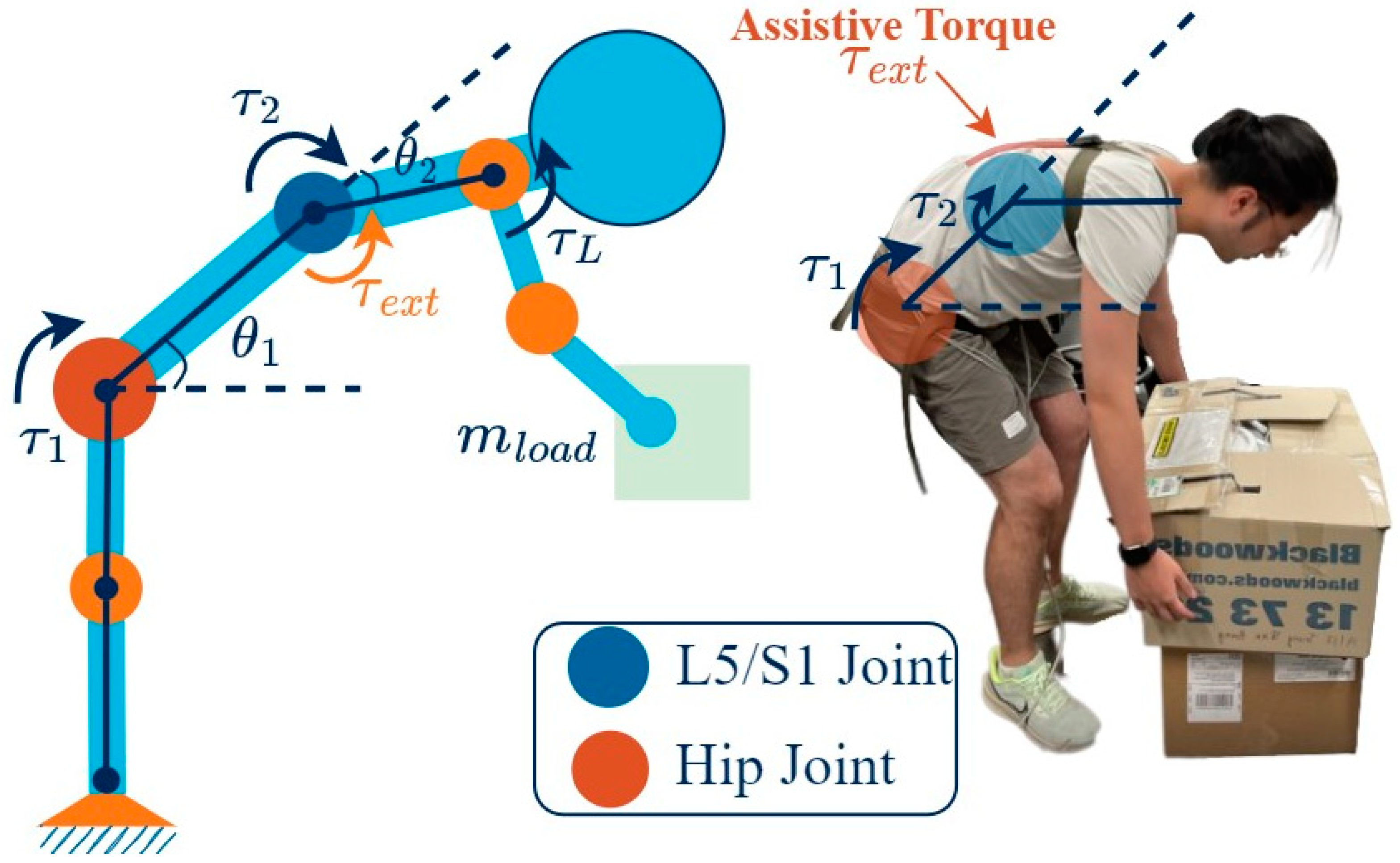
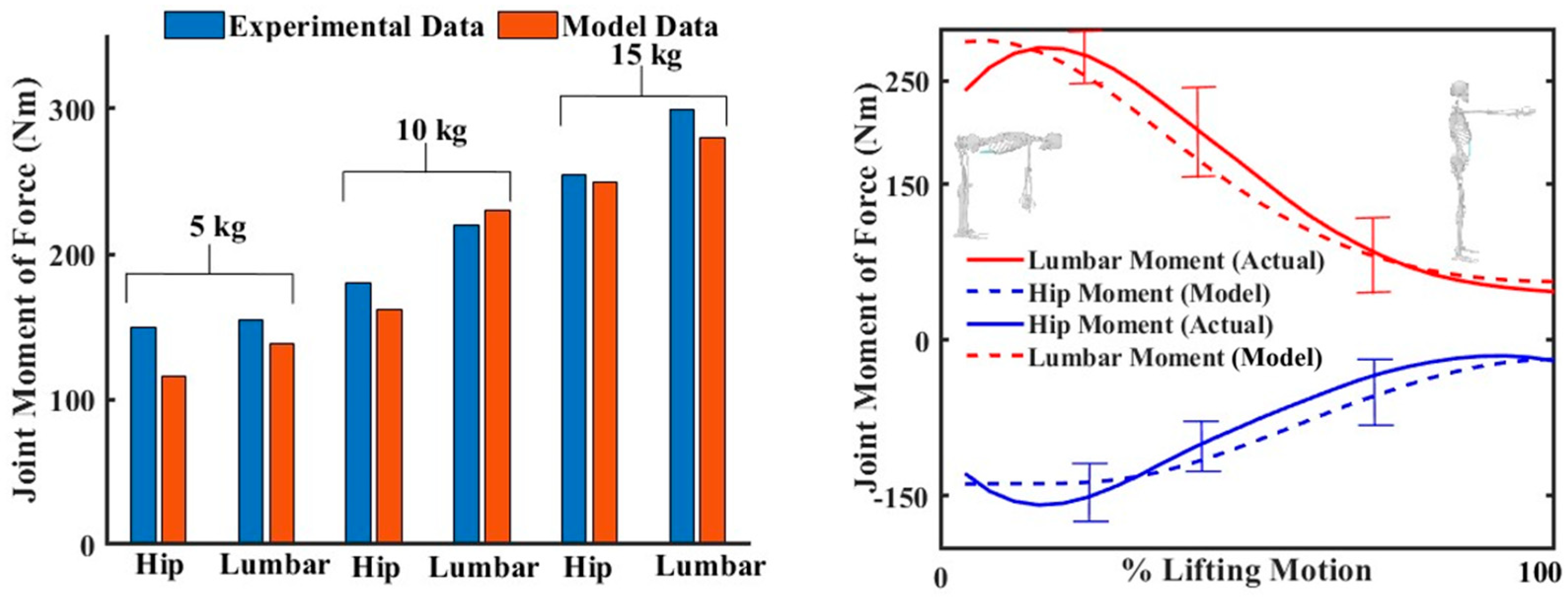
2.2. Mathematical Modelling of the Musculoskeletal System
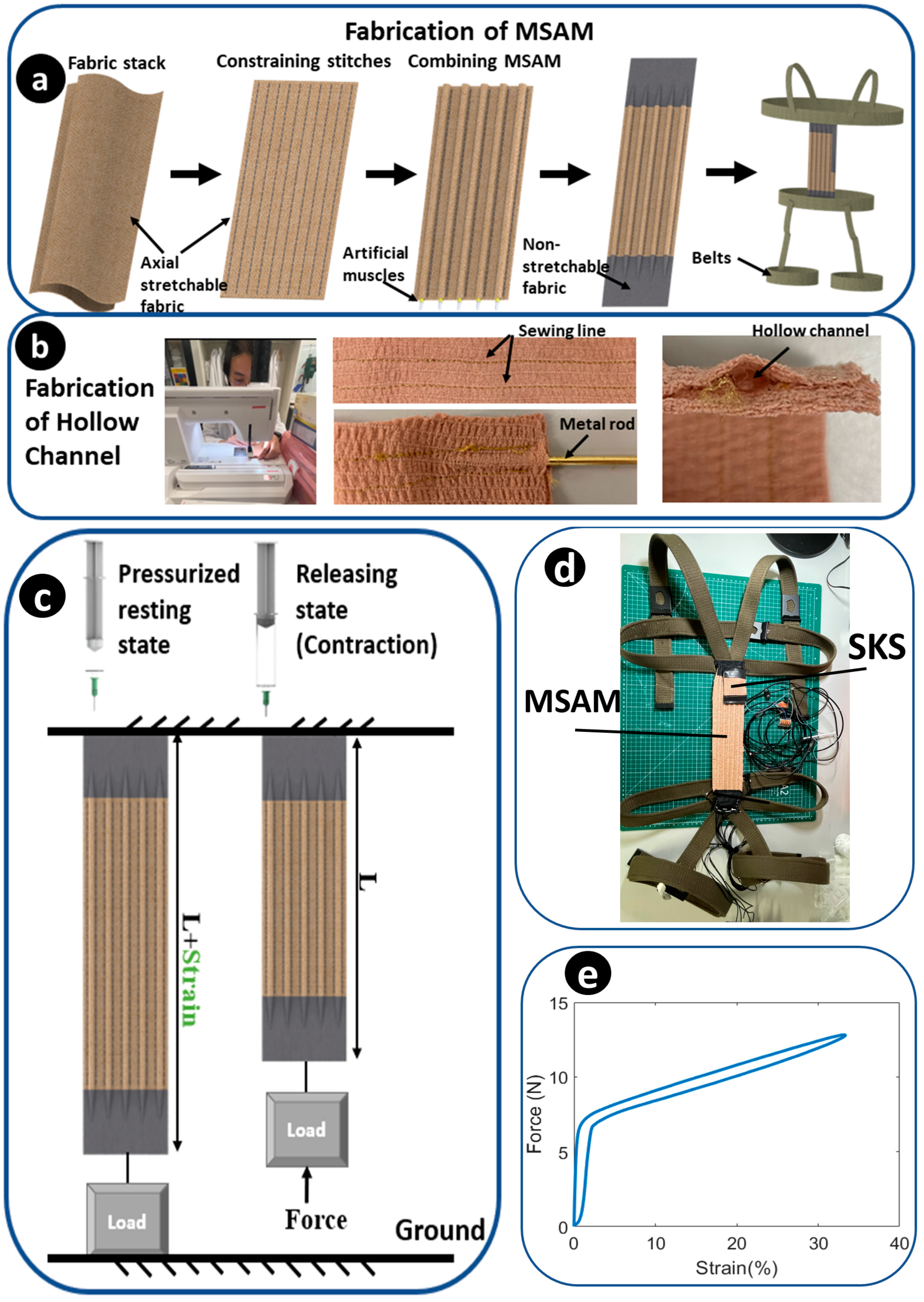
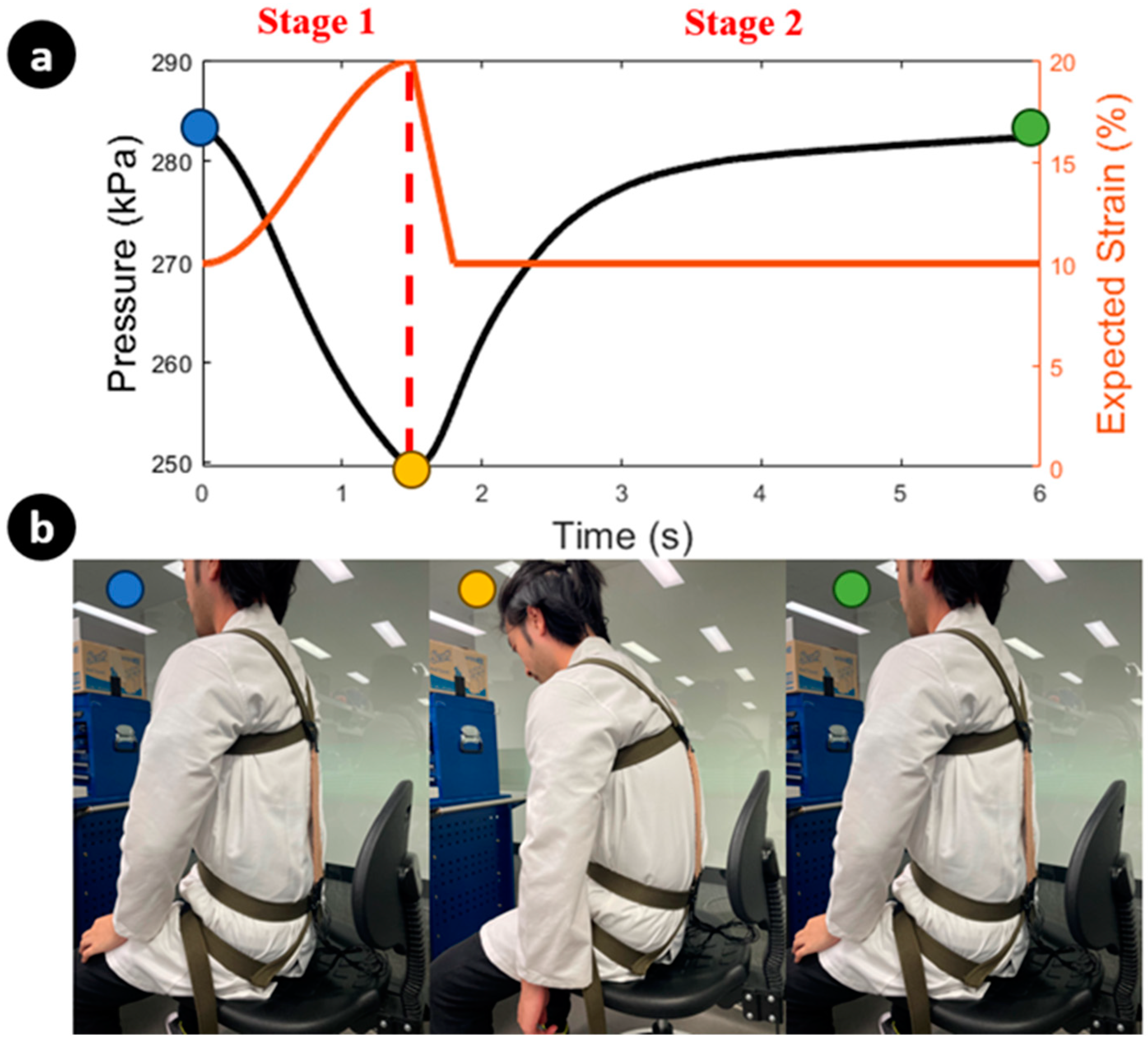
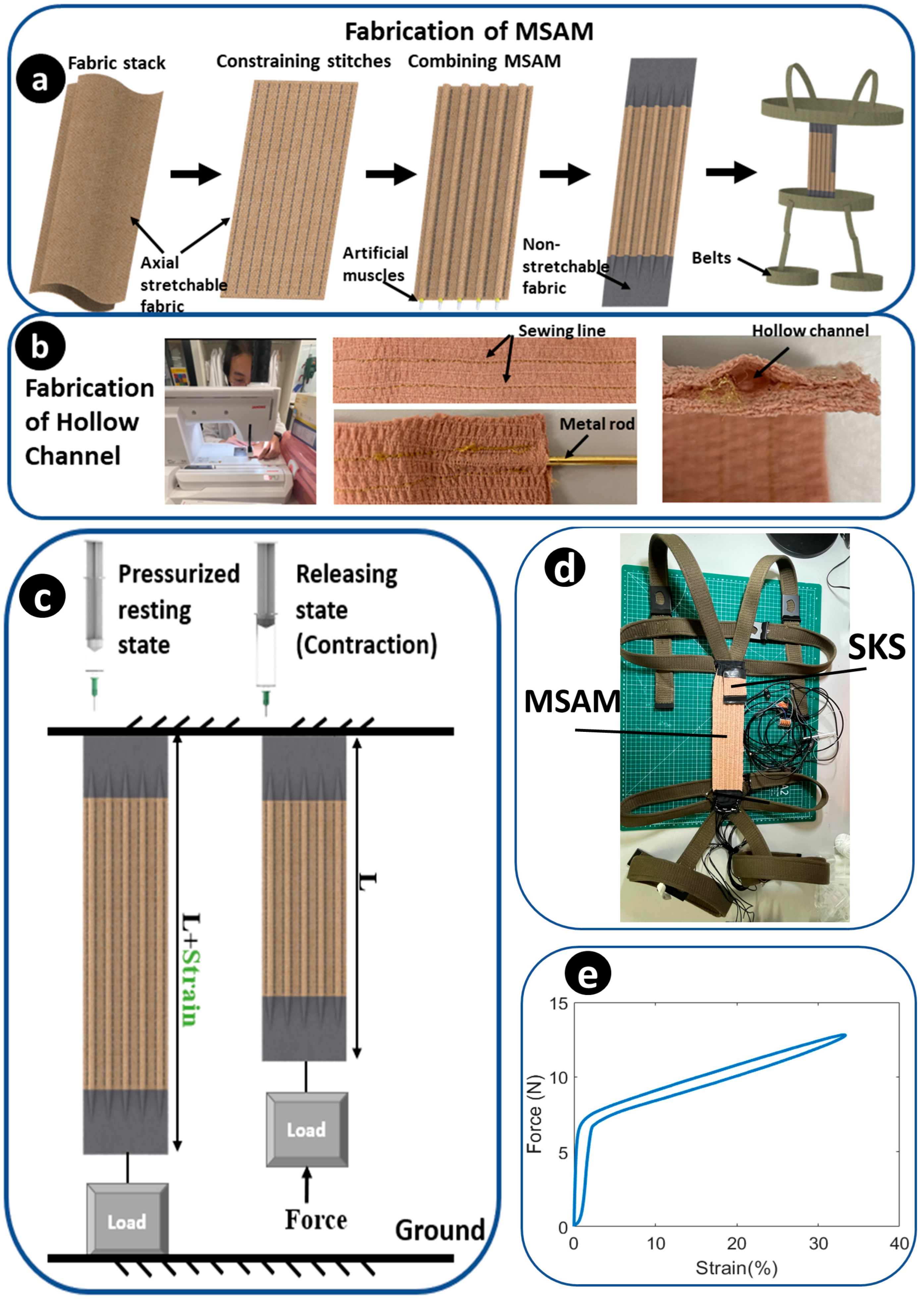
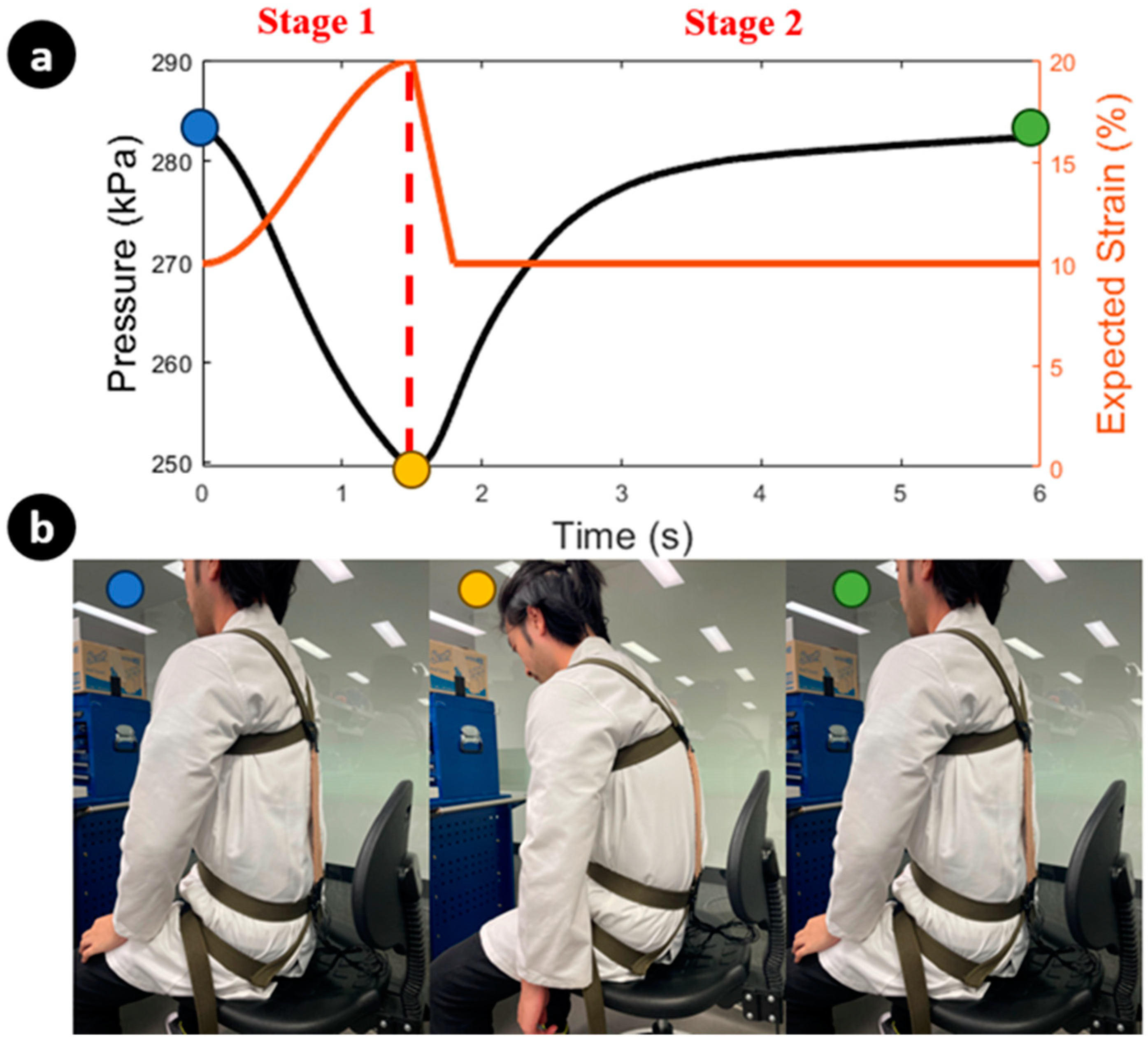
2.3. Actuation Mechanism
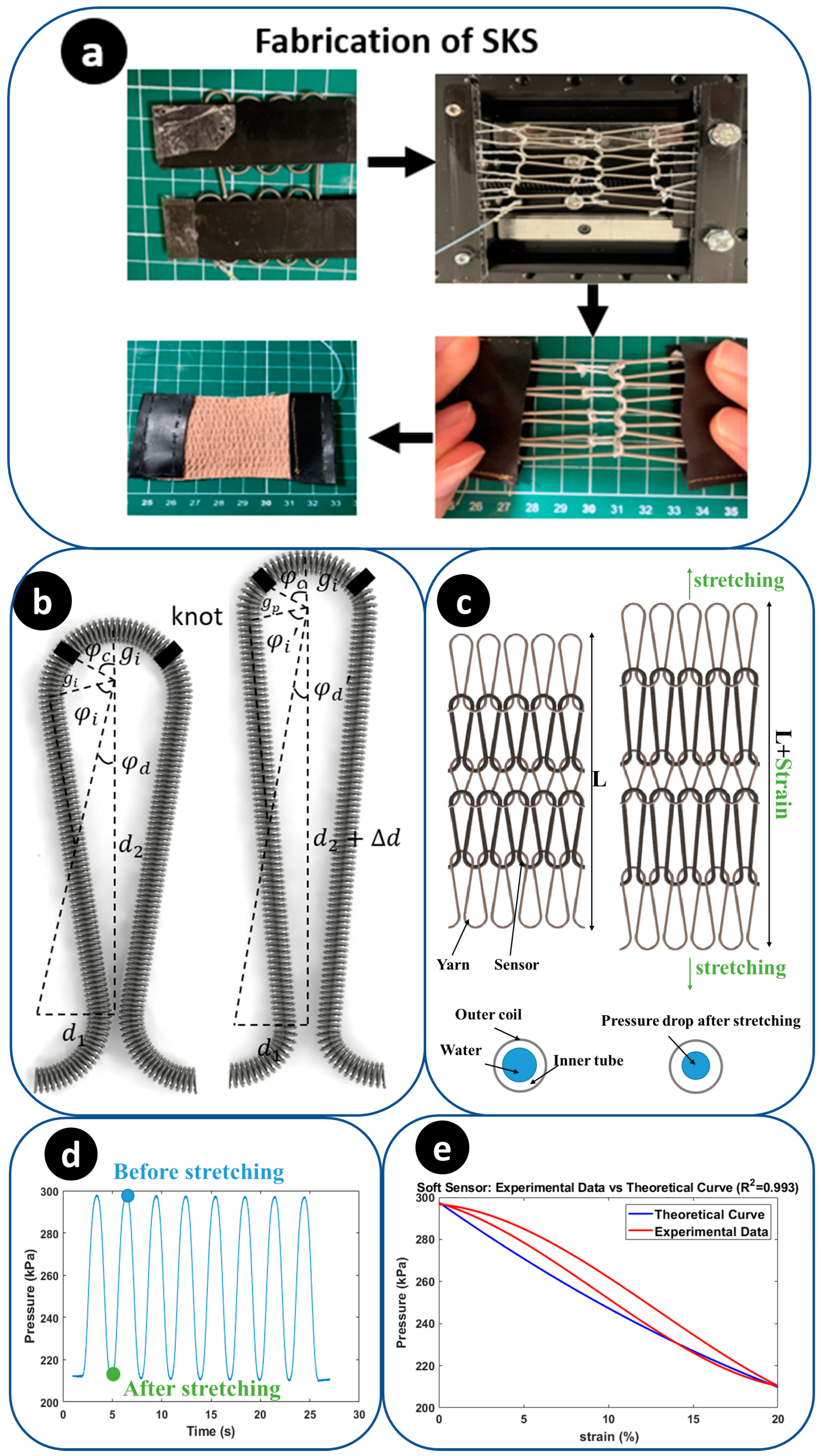
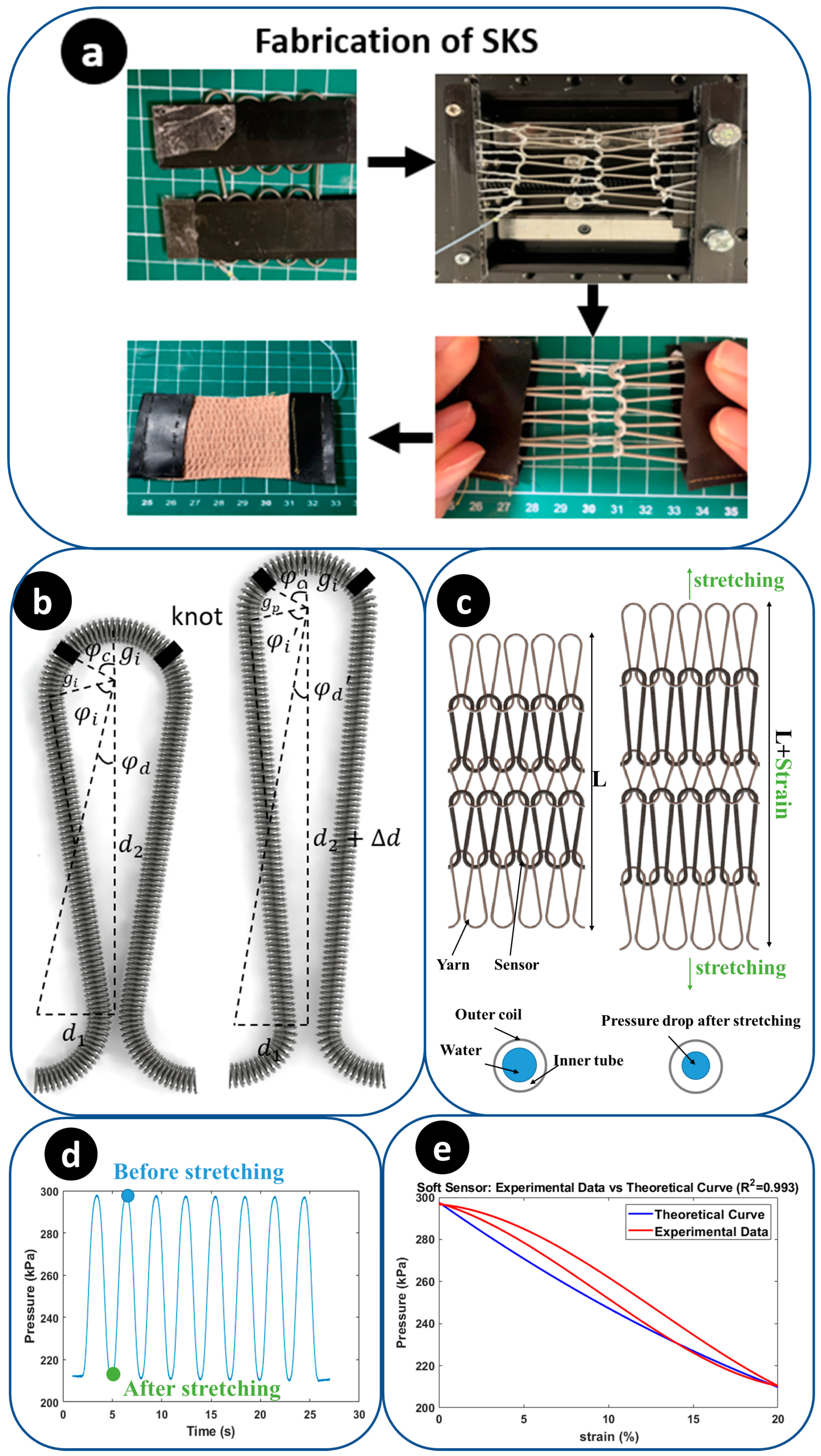
2.4. Soft Knitting Sensor
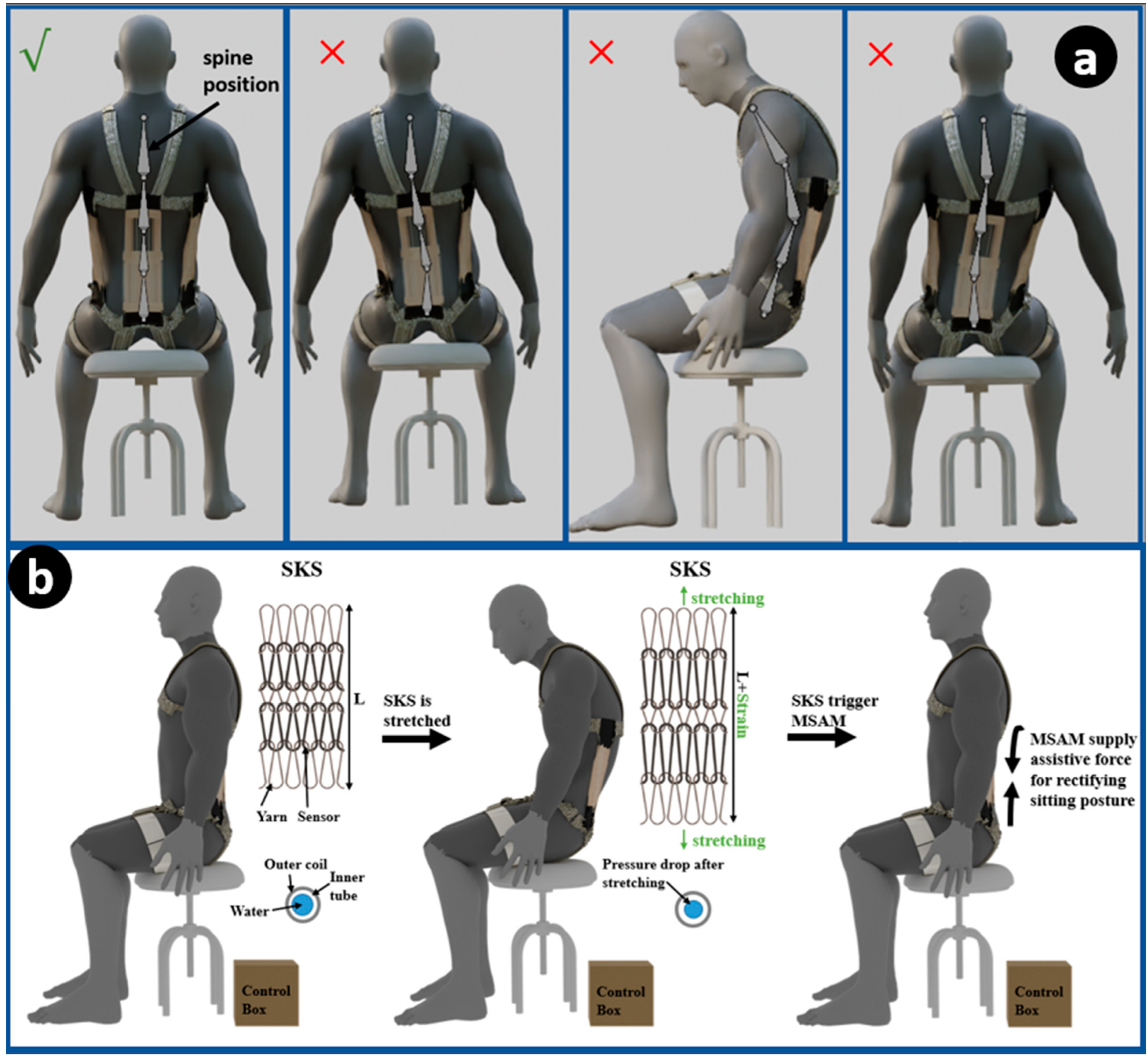
2.4.1. Overview and Working Principle
2.4.2. Design and Fabrication
2.4.3. Mathematical Model and Characterization
3. Experimental Method
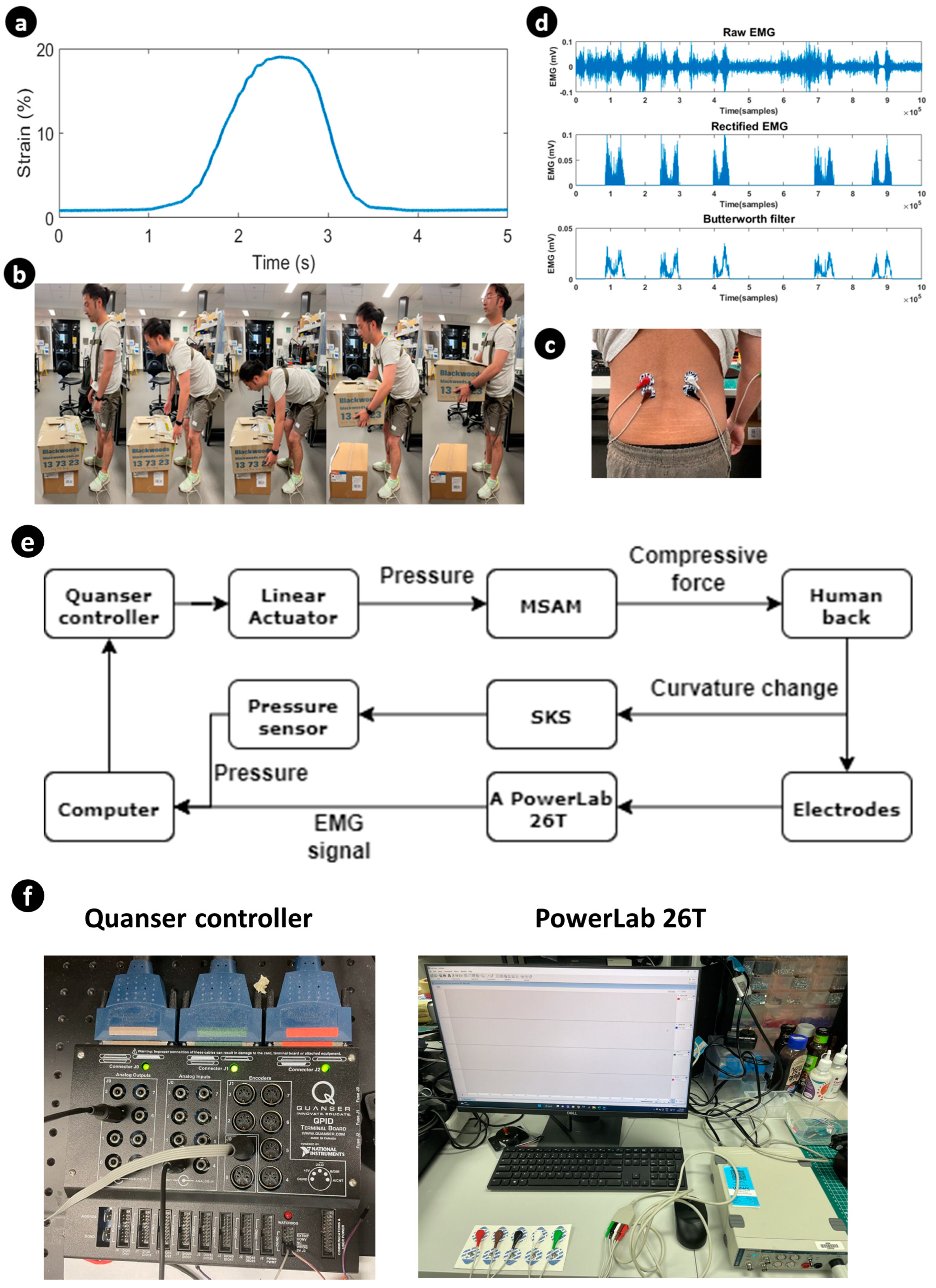
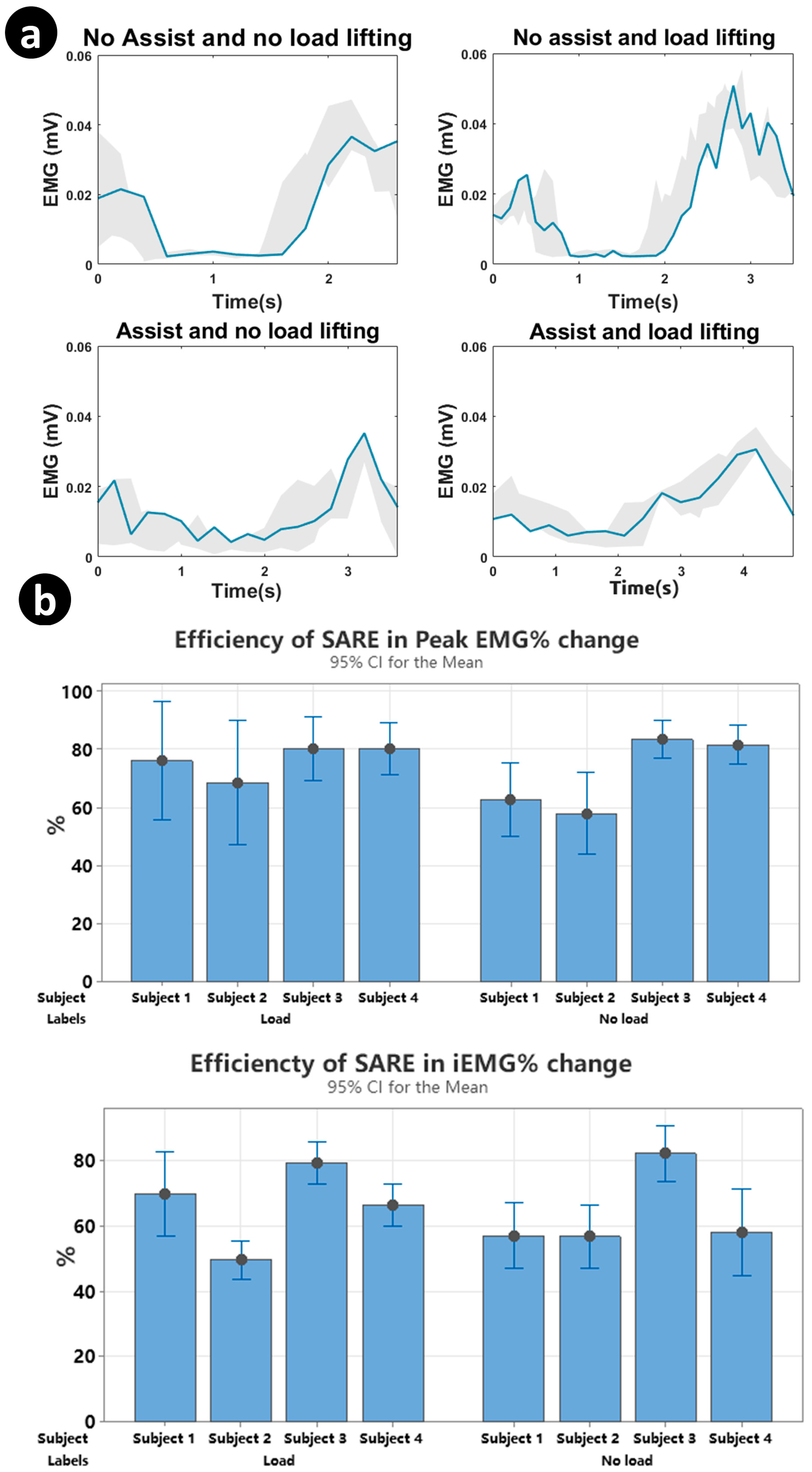
3.1. Lifting Assistance
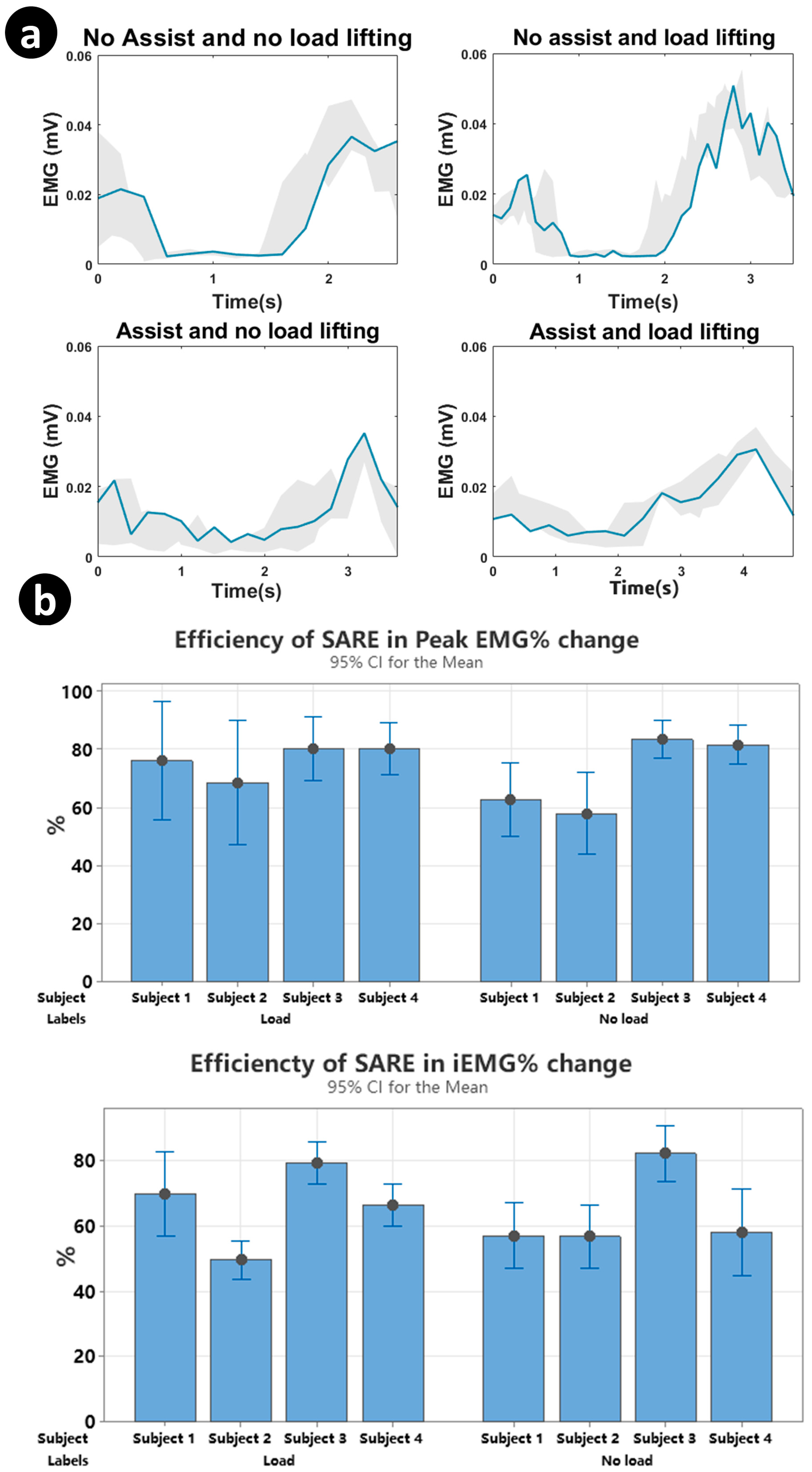
3.1.1. Surface Electromyography (sEMG)
3.1.2. Data Collection
3.1.3. Data Processing
3.2. Sitting Posture Monitoring
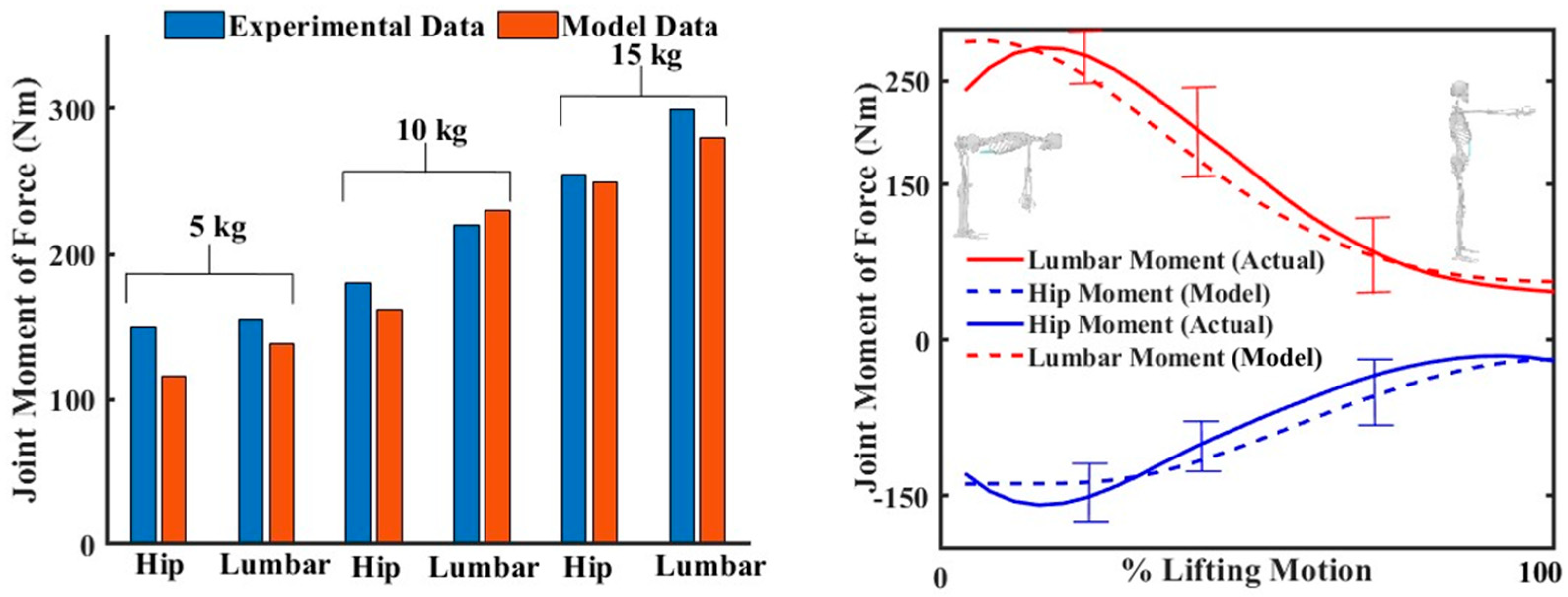
4. Results
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Abbreviations
| Abbreviation | Meaning |
| WMSDs | Work-related musculoskeletal disorders |
| SARE | Spine assistance robotic exosuit |
| EMG | Electromyography |
| iEMG | Integrated electromyogram |
| sEMG | Surface electromyography |
| LBP | Lower back pain |
| IMU | Inertial measurement unit |
| ADL | Activities of daily living |
| SKS | Soft knitting sensor |
| LES | Lumbar erector spinae |
| LD | Latissimus dorsi |
| TSA | Twisted string actuator |
| MSAMs | Multi-soft artificial muscles |
| FE | Finite element |
| DOF | Degree of freedom |
| RMS | Root mean square |
| HAL | Hybrid assistive limb |
References
- Bureau of Labor Statistics. Back Injuries Prominent in Work-Related Musculoskeletal Disorder Cases in 2016. The Economics Daily, 28 August 2018. [Google Scholar]
- van Gils, T.; Ramaekers, K.; Caris, A.; de Koster, R.B. Designing efficient order picking systems by combining planning problems: State-of-the-art classification and review. Eur. J. Oper. Res. 2018, 267, 1–15. [Google Scholar] [CrossRef]
- Hoy, D.; March, L.; Brooks, P.; Blyth, F.; Woolf, A.; Bain, C.; Williams, G.; Smith, E.; Vos, T.; Barendregt, J.; et al. The global burden of low back pain: Estimates from the Global Burden of Disease 2010 study. Ann. Rheum. Dis. 2014, 73, 968–974. [Google Scholar] [CrossRef]
- Waters, T.R.; Lu, M.-L.; Piacitelli, L.A.; Werren, D.; Deddens, J.A. Efficacy of the revised NIOSH lifting equation to predict risk of low back pain due to manual lifting: Expanded cross-sectional analysis. J. Occup. Environ. Med. 2011, 53, 1061–1067. [Google Scholar] [CrossRef]
- Wang, J.; Cao, Y.; Jin, X.; Maimaiti, N.; He, L.; Zhang, Z.; Wang, Z.; Zhang, W. Work-related musculoskeletal disorders and risk factors: A cross-sectional study among Chinese flight baggage handlers. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; Volume III: Musculoskeletal Disorders 20. Springer: Cham, Switzerland, 2019; pp. 212–218. [Google Scholar]
- Grabovac, I.; Dorner, T.E. Association between low back pain and various everyday performances: Activities of daily living, ability to work and sexual function. Wien. Klin. Wochenschr. 2019, 131, 541–549. [Google Scholar] [CrossRef] [PubMed]
- Spenkelink, C.D.; Hutten, M.M.; Hermens, H.J.; Greitemann, B.O. Assessment of activities of daily living with an ambulatory monitoring system: A comparative study in patients with chronic low back pain and nonsymptomatic controls. Clin. Rehabil. 2002, 16, 16–26. [Google Scholar] [CrossRef] [PubMed]
- Waxman, R.; Tennant, A.B.; Helliwell, P. A Prospective Follow-Up Study of Low Back Pain in the Community. Spine 2000, 25, 2085–2090. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.-K.; Yang, Y.; Gu, M.-L.; Mao, S.-J.; Zhou, W.-S. Effects of Low Back Pain Exercises on Pain Symptoms and Activities of Daily Living: A Systematic Review and Meta-Analysis. Percept. Mot. Ski. 2021, 129, 63–89. [Google Scholar] [CrossRef]
- Yung, M.; Kolus, A.; Wells, R.; Neumann, W.P. Examining the fatigue-quality relationship in manufacturing. Appl. Ergon. 2020, 82, 102919. [Google Scholar] [CrossRef]
- Bazrgari, B.; Shirazi-Adl, A.; Arjmand, N. Analysis of squat and stoop dynamic liftings: Muscle forces and internal spinal loads. Eur. Spine J. 2007, 16, 687–699. [Google Scholar] [CrossRef]
- Anwary, A.R.; Cetinkaya, D.; Vassallo, M.; Bouchachia, H. Smart-Cover: A real time sitting posture monitoring system. Sens. Actuators A Phys. 2021, 317, 112451. [Google Scholar] [CrossRef]
- Wu, C.-C.; Chiu, C.-C.; Yeh, C.-Y. Development of wearable posture monitoring system for dynamic assessment of sitting posture. Phys. Eng. Sci. Med. 2020, 43, 187–203. [Google Scholar] [CrossRef] [PubMed]
- Ali, A.; Fontanari, V.; Schmoelz, W.; Agrawal, S.K. Systematic Review of Back-Support Exoskeletons and Soft Robotic Suits. Front. Bioeng. Biotechnol. 2021, 9, 765257. [Google Scholar] [CrossRef] [PubMed]
- Yong, X.; Yan, Z.; Wang, C.; Wang, C.; Li, N.; Wu, X. Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task. Micromachines 2019, 10, 463. [Google Scholar] [CrossRef] [PubMed]
- von Glinski, A.; Yilmaz, E.; Mrotzek, S.; Marek, E.; Jettkant, B.; Brinkemper, A.; Fisahn, C.; Schildhauer, T.A.; Geßmann, J. Effectiveness of an on-body lifting aid (HAL® for care support) to reduce lower back muscle activity during repetitive lifting tasks. J. Clin. Neurosci. 2019, 63, 249–255. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, H.H. A Lower-Back Robotic Exoskeleton: Industrial Handling Augmentation Used to Provide Spinal Support. IEEE Robot. Autom. Mag. 2018, 25, 95–106. [Google Scholar] [CrossRef]
- Khomami, A.M.; Najafi, F. A survey on soft lower limb cable-driven wearable robots without rigid links and joints. Robot. Auton. Syst. 2021, 144, 103846. [Google Scholar] [CrossRef]
- Di Natali, C.; Chini, G.; Toxiri, S.; Monica, L.; Anastasi, S.; Draicchio, F.; Caldwell, D.G.; Ortiz, J. Equivalent Weight: Connecting Exoskeleton Effectiveness with Ergonomic Risk during Manual Material Handling. Int. J. Environ. Res. Public Health 2021, 18, 2677. [Google Scholar] [CrossRef]
- Li, J.M.; Molinaro, D.D.; King, A.S.; Mazumdar, A.; Young, A.J. Design and Validation of a Cable-Driven Asymmetric Back Exosuit. IEEE Trans. Robot. 2021, 38, 1489–1502. [Google Scholar] [CrossRef]
- Lee, D.; Kim, S.; Park, H.-J.; Kim, S.; Shin, D. A Spine Assistive Robot With a Routed Twisted String Actuator and a Flat-Back Alleviation Mechanism for Lumbar-Degenerative Flat Back. IEEE/ASME Trans. Mechatron. 2022, 27, 5185–5196. [Google Scholar] [CrossRef]
- Yang, X.; Huang, T.-H.; Hu, H.; Yu, S.; Zhang, S.; Zhou, X.; Carriero, A.; Yue, G.; Su, H. Spine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance. IEEE Robot. Autom. Lett. 2019, 4, 4547–4554. [Google Scholar] [CrossRef]
- Yao, Z.; Linnenberg, C.; Weidner, R.; Wulfsberg, J. Development of a soft power suit for lower back assistance. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5103–5109. [Google Scholar]
- Whitesides, G.M. Soft-Robotik. Angew. Chem. 2018, 130, 4336–4353. [Google Scholar] [CrossRef]
- Sanchez-Villamañan, M.d.C.; Gonzalez-Vargas, J.; Torricelli, D.; Moreno, J.C.; Pons, J.L. Compliant lower limb exoskeletons: A comprehensive review on mechanical design principles. J. Neuroeng. Rehabil. 2019, 16, 55. [Google Scholar] [CrossRef] [PubMed]
- Hoang, T.T.; Sy, L.; Bussu, M.; Thai, M.T.; Low, H.; Phan, P.T.; Davies, J.; Nguyen, C.C.; Lovell, N.H.; Do, T.N. A Wearable Soft Fabric Sleeve for Upper Limb Augmentation. Sensors 2021, 21, 7638. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Do, T.N.; Hawkes, E.; Visell, Y. Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics. Soft Robot. 2020, 7, 179–197. [Google Scholar] [CrossRef]
- Phan, P.T.; Hoang, T.T.; Thai, M.T.; Low, H.; Lovell, N.H.; Do, T.N. Twisting and Braiding Fluid-Driven Soft Artificial Muscle Fibers for Robotic Applications. Soft Robot. 2022, 9, 820–836. [Google Scholar] [CrossRef]
- Phan, P.T.; Thai, M.T.; Hoang, T.T.; Davies, J.; Nguyen, C.C.; Phan, H.-P.; Lovell, N.H.; Do, T.N. Smart textiles using fluid-driven artificial muscle fibers. Sci. Rep. 2022, 12, 11067. [Google Scholar] [CrossRef]
- Sanchez, V.; Walsh, C.J.; Wood, R.J. Textile Technology for Soft Robotic and Autonomous Garments. Adv. Funct. Mater. 2021, 31, 2008278. [Google Scholar] [CrossRef]
- Whitfield, B.H.; Costigan, P.A.; Stevenson, J.M.; Smallman, C.L. Effect of an on-body ergonomic aid on oxygen consumption during a repetitive lifting task. Int. J. Ind. Ergon. 2014, 44, 39–44. [Google Scholar] [CrossRef]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Monica, L.; Anastasi, S.; Caldwell, D.G.; Ortiz, J. Back-Support Exoskeletons for Occupational Use: An Overview of Technological Advances and Trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef]
- Peng, S.; Wu, S.; Yu, Y.; Sha, Z.; Li, G.; Hoang, T.T.; Thai, M.T.; Do, T.N.; Chu, D.; Wang, C.H. Carbon nanofiber-reinforced strain sensors with high breathability and anisotropic sensitivity. J. Mater. Chem. A 2021, 9, 26788–26799. [Google Scholar] [CrossRef]
- Davies, J.; Thai, M.T.; Hoang, T.T.; Nguyen, C.C.; Phan, P.T.; Phan, H.; Lovell, N.H.; Do, T.N. A Stretchable Filament Sensor with Tunable Sensitivity for Wearable Robotics and Healthcare Applications. Adv. Mater. Technol. 2023, 8, 2201453. [Google Scholar] [CrossRef]
- Thai, M.T.; Hoang, T.T.; Phan, P.T.; Lovell, N.H.; Do, T.N. Soft Microtubule Muscle-Driven 3-Axis Skin-Stretch Haptic Devices. IEEE Access 2020, 8, 157878–157891. [Google Scholar] [CrossRef]
- Jung, Y.H.; Yoo, J.-Y.; Vázquez-Guardado, A.; Kim, J.-H.; Kim, J.-T.; Luan, H.; Park, M.; Lim, J.; Shin, H.-S.; Su, C.-J.; et al. A wireless haptic interface for programmable patterns of touch across large areas of the skin. Nat. Electron. 2022, 5, 374–385. [Google Scholar] [CrossRef]
- Adilkhanov, A.; Rubagotti, M.; Kappassov, Z. Haptic Devices: Wearability-Based Taxonomy and Literature Review. IEEE Access 2022, 10, 91923–91947. [Google Scholar] [CrossRef]
- Phan, P.T.; Welch, D.; Spiggle, J.; Thai, M.T.; Hoang, T.T.; Davies, J.; Nguyen, C.C.; Zhu, K.; Phan, H.-P.; Lovell, N.H.; et al. Fabrication, nonlinear modeling, and control of woven hydraulic artificial muscles for wearable applications. Sens. Actuators A Phys. 2023, 360, 114555. [Google Scholar] [CrossRef]
- Hoang, T.T.; Phan, P.T.; Thai, M.T.; Davies, J.; Nguyen, C.C.; Phan, H.P.; Lovell, N.H.; Do, T.N. Magnetically engineered conductivity of soft liquid metal composites for robotic, wearable electronic, and medical applications. Adv. Intell. Syst. 2022, 4, 2200282. [Google Scholar] [CrossRef]
- Kanthi, M.; Puranik, A.; Nayak, A.V. Wearable device for yogic breathing with real-time heart rate and posture monitoring. J. Med. Signals Sens. 2021, 11, 253–261. [Google Scholar] [CrossRef]
- Jiang, Y.; An, J.; Liang, F.; Zuo, G.; Yi, J.; Ning, C.; Zhang, H.; Dong, K.; Wang, Z.L. Knitted self-powered sensing textiles for machine learning-assisted sitting posture monitoring and correction. Nano Res. 2022, 15, 8389–8397. [Google Scholar] [CrossRef]
- Kang, S.-W.; Choi, H.; Park, H.-I.; Choi, B.-G.; Im, H.; Shin, D.; Jung, Y.-G.; Lee, J.-Y.; Park, H.-W.; Park, S.; et al. The Development of an IMU Integrated Clothes for Postural Monitoring Using Conductive Yarn and Interconnecting Technology. Sensors 2017, 17, 2560. [Google Scholar] [CrossRef]
- Yu, J.; Qin, S.; Zhang, H.; Wei, Y.; Zhu, X.; Yang, Y.; Sun, Q. Fiber-Shaped Triboiontronic Electrochemical Transistor. Research 2021, 2021, 9840918. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, S.; Shi, Z.; Wang, Y.; Lei, Y.; Han, J.; Xiong, Y.; Sun, J.; Zheng, L.; Sun, Q.; et al. Eco-friendly and recyclable all cellulose triboelectric nanogenerator and self-powered interactive interface. Nano Energy 2021, 89, 106354. [Google Scholar] [CrossRef]
- Nguyen, N.K.; Nguyen, T.; Nguyen, T.K.; Yadav, S.; Dinh, T.; Masud, M.K.; Singha, P.; Do, T.N.; Barton, M.J.; Ta, H.T.; et al. Wide-band-gap semiconductors for biointegrated electronics: Recent advances and future directions. ACS Appl. Electron. Mater. 2021, 3, 1959–1981. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, C.; Xiong, Y.; Yang, J.; Jiao, H.; Zhang, Q.; Cao, R.; Wang, Z.L.; Sun, Q. Versatile Ion-Gel Fibrous Membrane for Energy-Harvesting Iontronic Skin. Adv. Funct. Mater. 2023, 33, 2303723. [Google Scholar] [CrossRef]
- Xiong, Y.; Luo, L.; Yang, J.; Han, J.; Liu, Y.; Jiao, H.; Wu, S.; Cheng, L.; Feng, Z.; Sun, J.; et al. Scalable spinning, winding, and knitting graphene textile TENG for energy harvesting and human motion recognition. Nano Energy 2023, 107, 108137. [Google Scholar] [CrossRef]
- Phan, P.T.; Thai, M.T.; Hoang, T.T.; Lovell, N.H.; Do, T.N. HFAM: Soft Hydraulic Filament Artificial Muscles for Flexible Robotic Applications. IEEE Access 2020, 8, 226637–226652. [Google Scholar] [CrossRef]
- Arjmand, N.; Shirazi-Adl, A.J.S. Biomechanics of changes in lumbar posture in static lifting. Spine 2005, 30, 2637–2648. [Google Scholar] [CrossRef]
- Davis, K.G.; Marras, W.S.; Waters, T.R. Evaluation of spinal loading during lowering and lifting. Clin. Biomech. 1998, 13, 141–152. [Google Scholar] [CrossRef]
- Sharma, B.; Pillai, B.M.; Suthakorn, J. Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion With Stochastic Motion Planning Framework. IEEE Trans. Med. Robot. Bionics 2022, 4, 1022–1033. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, Y.; Kim, Y. Lower extremity joint kinetics and lumbar curvature during squat and stoop lifting. BMC Musculoskelet. Disord. 2009, 10, 15. [Google Scholar] [CrossRef]
- Kermavnar, T.; de Vries, A.W.; de Looze, M.P.; O’Sullivan, L.W. Effects of industrial back-support exoskeletons on body loading and user experience: An updated systematic review. Ergonomics 2021, 64, 685–711. [Google Scholar] [CrossRef]
- Quirk, D.A.; Chung, J.; Schiller, G.; Cherin, J.M.; Arens, P.; Sherman, D.A.; Zeligson, E.R.; Dalton, D.M.; Awad, L.N.; Walsh, C.J. Reducing Back Exertion and Improving Confidence of Individuals with Low Back Pain with a Back Exosuit: A Feasibility Study for Use in BACPAC. Pain Med. 2023, 24, S175–S186. [Google Scholar] [CrossRef] [PubMed]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Phan, P.T.; Sharma, B.; Davies, J.; Thai, M.T.; Hoang, T.T.; Nguyen, C.C.; Ji, A.; Nicotra, E.; La, H.M.; et al. A Smart, Textile-Driven, Soft Exosuit for Spinal Assistance. Sensors 2023, 23, 8329. https://doi.org/10.3390/s23198329
Zhu K, Phan PT, Sharma B, Davies J, Thai MT, Hoang TT, Nguyen CC, Ji A, Nicotra E, La HM, et al. A Smart, Textile-Driven, Soft Exosuit for Spinal Assistance. Sensors. 2023; 23(19):8329. https://doi.org/10.3390/s23198329
Chicago/Turabian StyleZhu, Kefan, Phuoc Thien Phan, Bibhu Sharma, James Davies, Mai Thanh Thai, Trung Thien Hoang, Chi Cong Nguyen, Adrienne Ji, Emanuele Nicotra, Hung Manh La, and et al. 2023. "A Smart, Textile-Driven, Soft Exosuit for Spinal Assistance" Sensors 23, no. 19: 8329. https://doi.org/10.3390/s23198329
APA StyleZhu, K., Phan, P. T., Sharma, B., Davies, J., Thai, M. T., Hoang, T. T., Nguyen, C. C., Ji, A., Nicotra, E., La, H. M., Vo-Doan, T. T., Phan, H.-P., Lovell, N. H., & Do, T. N. (2023). A Smart, Textile-Driven, Soft Exosuit for Spinal Assistance. Sensors, 23(19), 8329. https://doi.org/10.3390/s23198329