
A Fusion Positioning Method for Indoor Geomagnetic/Light Intensity/Pedestrian Dead Reckoning Based on Dual-Layer Tent–Atom Search Optimization–Back Propagation

Abstract
:1. Introduction
- (1)
- To mitigate errors from device attitude changes, we first process sensor data using coordinate transformation. Next, we incorporate indoor lighting factors to improve spatial resolution. Geomagnetic and light intensity data are processed separately using radial basis function interpolation at different resolutions, establishing a combined fingerprint library.
- (2)
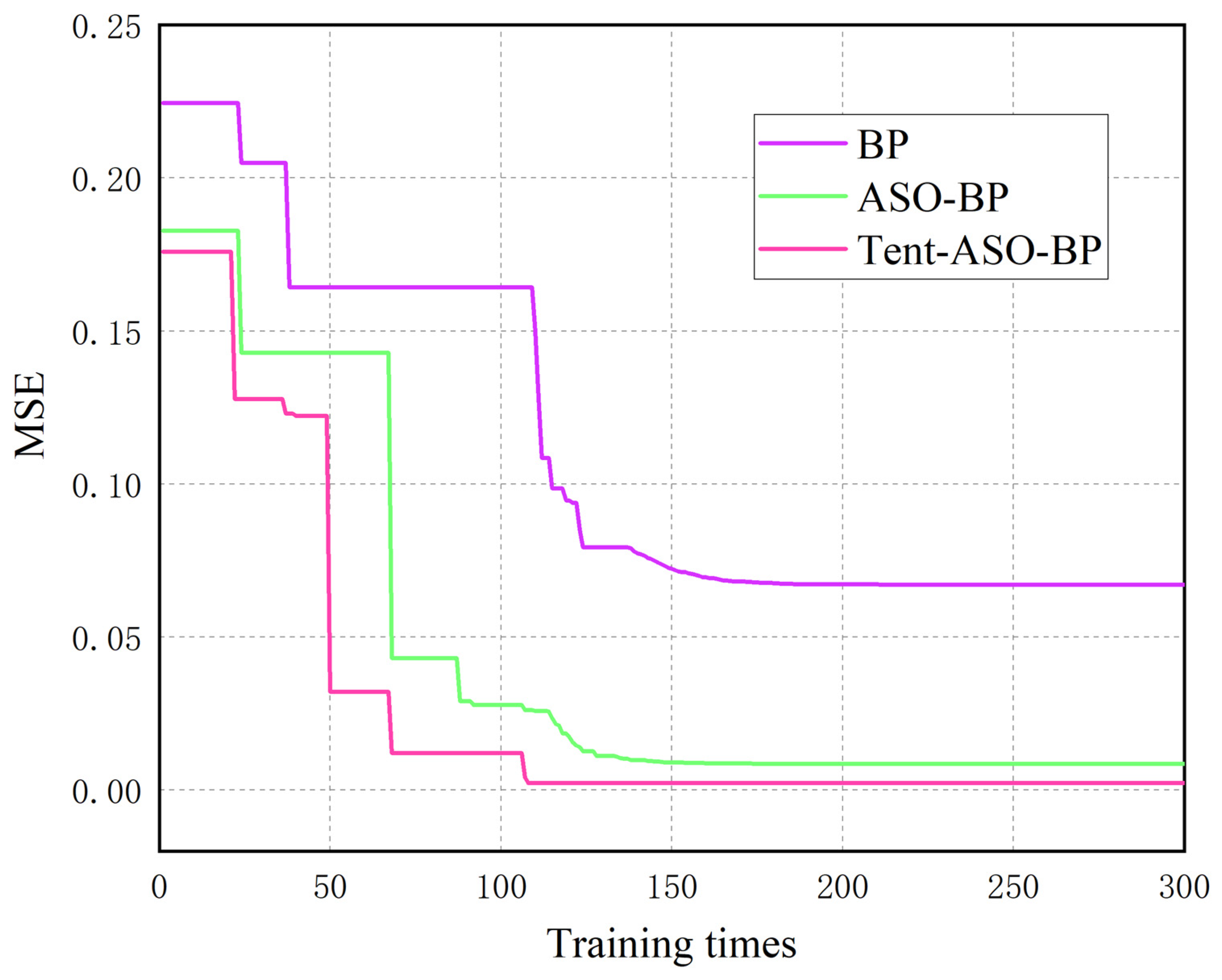
- To address the limitations of traditional BP neural networks, like slow convergence and overfitting, we employ the Tent-chaos-mapping-enhanced ASO algorithm to optimize model weights and thresholds, constructing our Tent-ASO-BP positioning model.
- (3)
- For estimating pedestrian trajectories, we set a time threshold to eliminate the impact of false wave peaks or troughs in step detection. Furthermore, we design a BKF-WT model to enhance the precision of the pedestrian trajectory projection.
- (4)
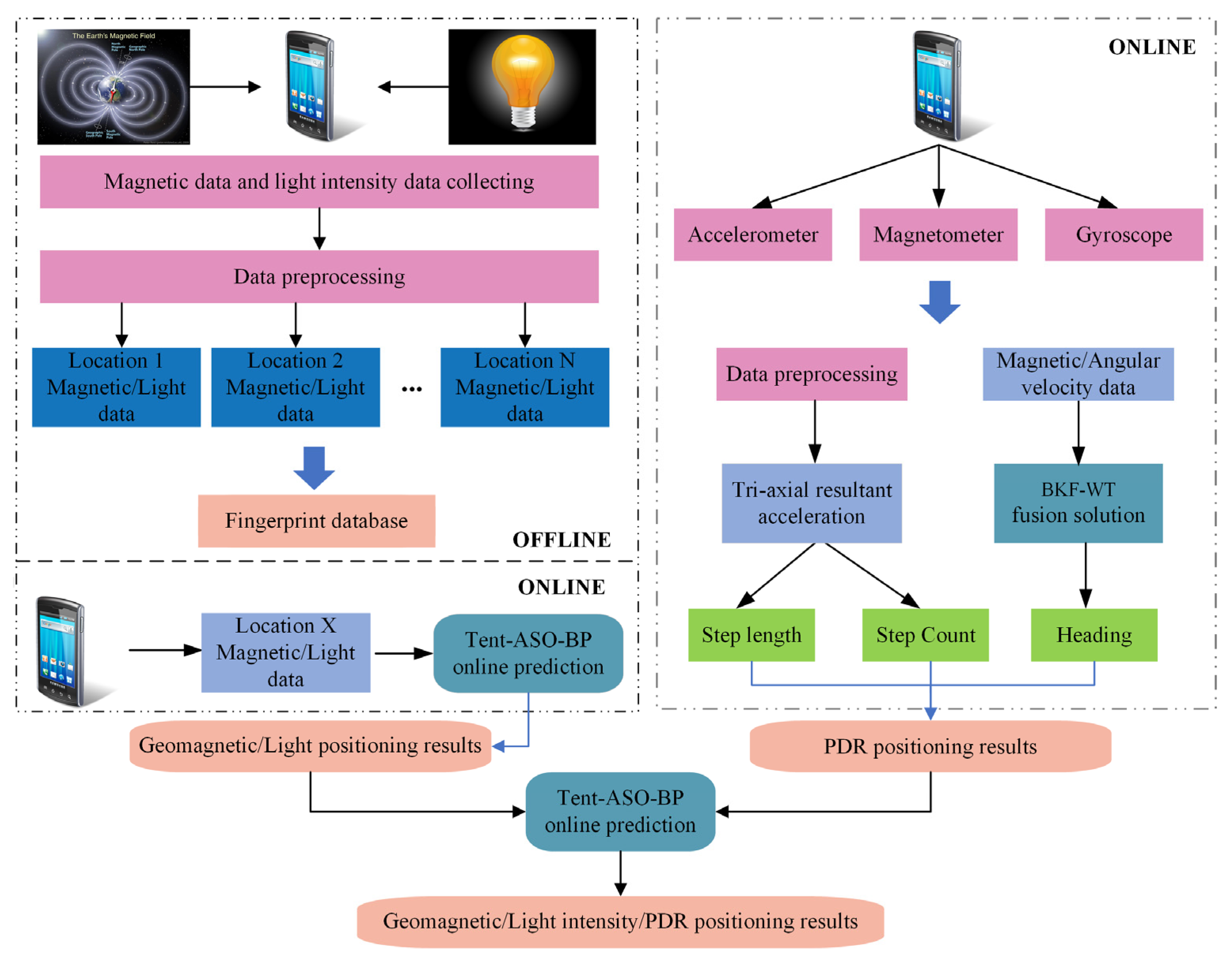
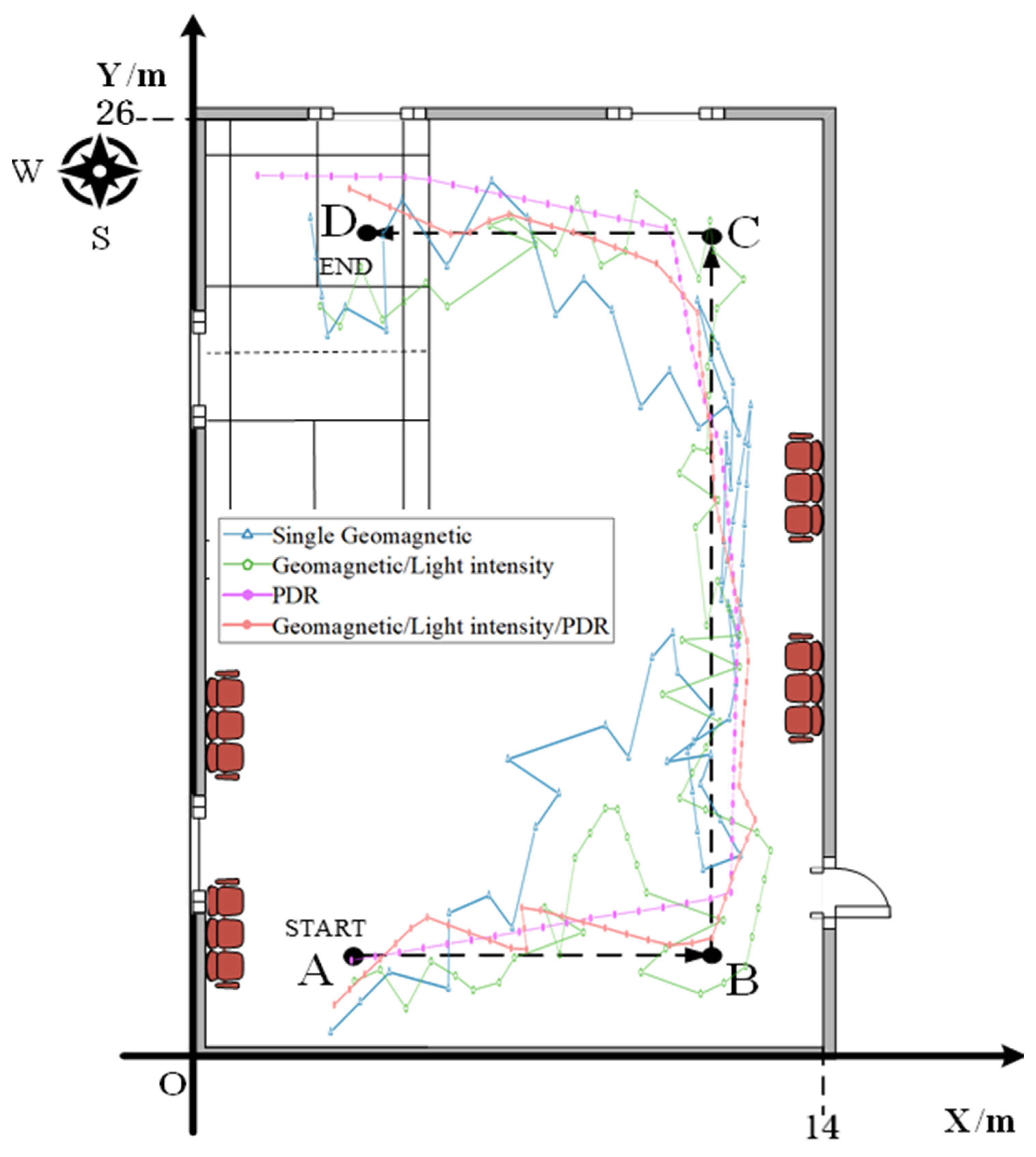
- We introduce a hierarchically optimized method that fuses multiple data sources for positioning. Using a dual-layer Tent-ASO-BP model, we achieve the final results that integrate geomagnetic, light intensity, and PDR data. We then evaluate our method under various scenarios, comparing it against standalone geomagnetic, geomagnetic/light intensity, and PDR positioning approaches. These comparative tests validate the benefits of our proposed positioning method.
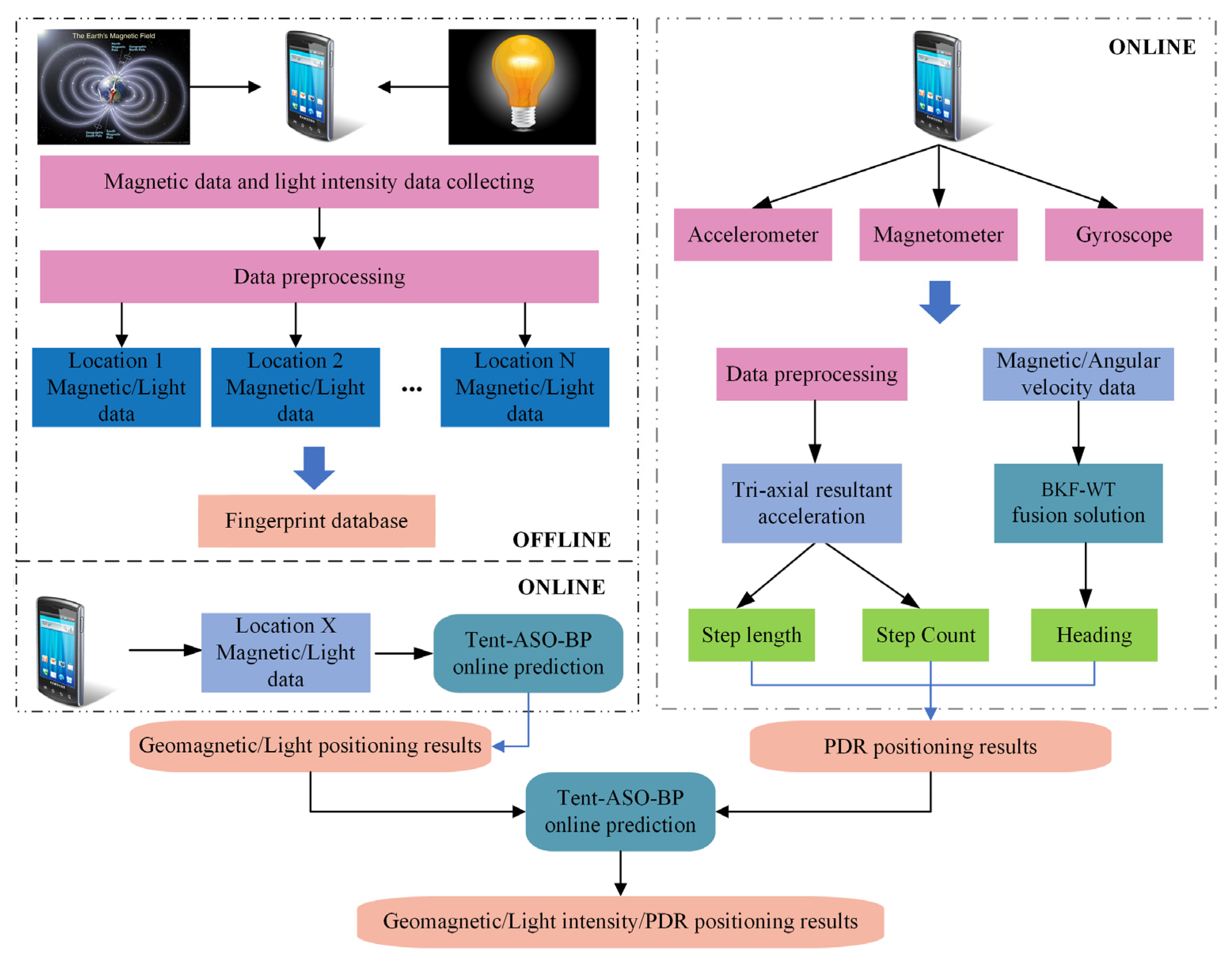
2. Geomagnetic/Light Intensity/PDR Fusion Positioning Solution
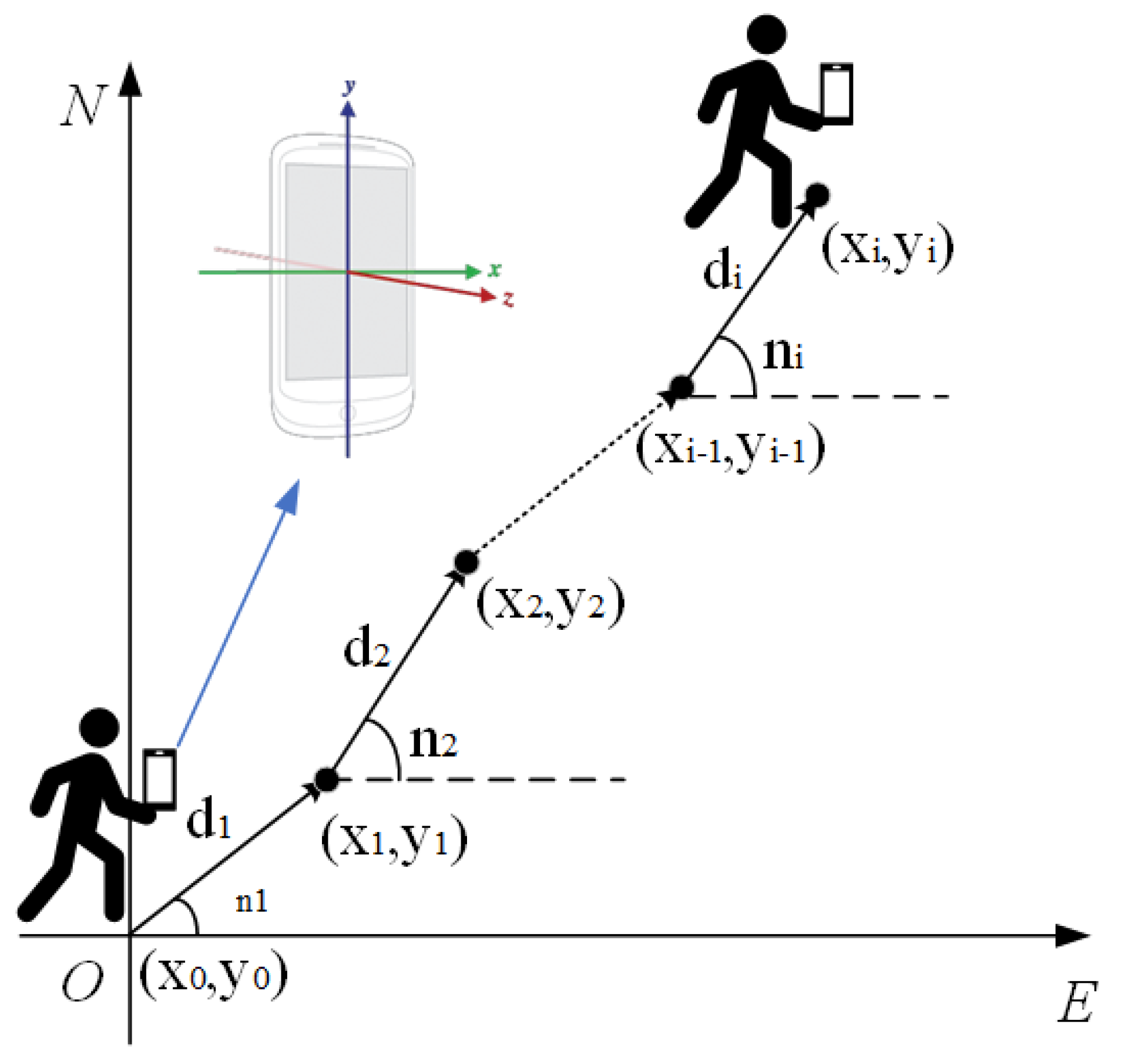
2.1. Improved PDR Method
- (1)
- Computing the total step count in the motion trajectory to determine motion distance.
- (2)
- Estimating the step size during movement.
- (3)
- Calculating the pedestrian’s heading angle, which depicts the direction accurately at each step.
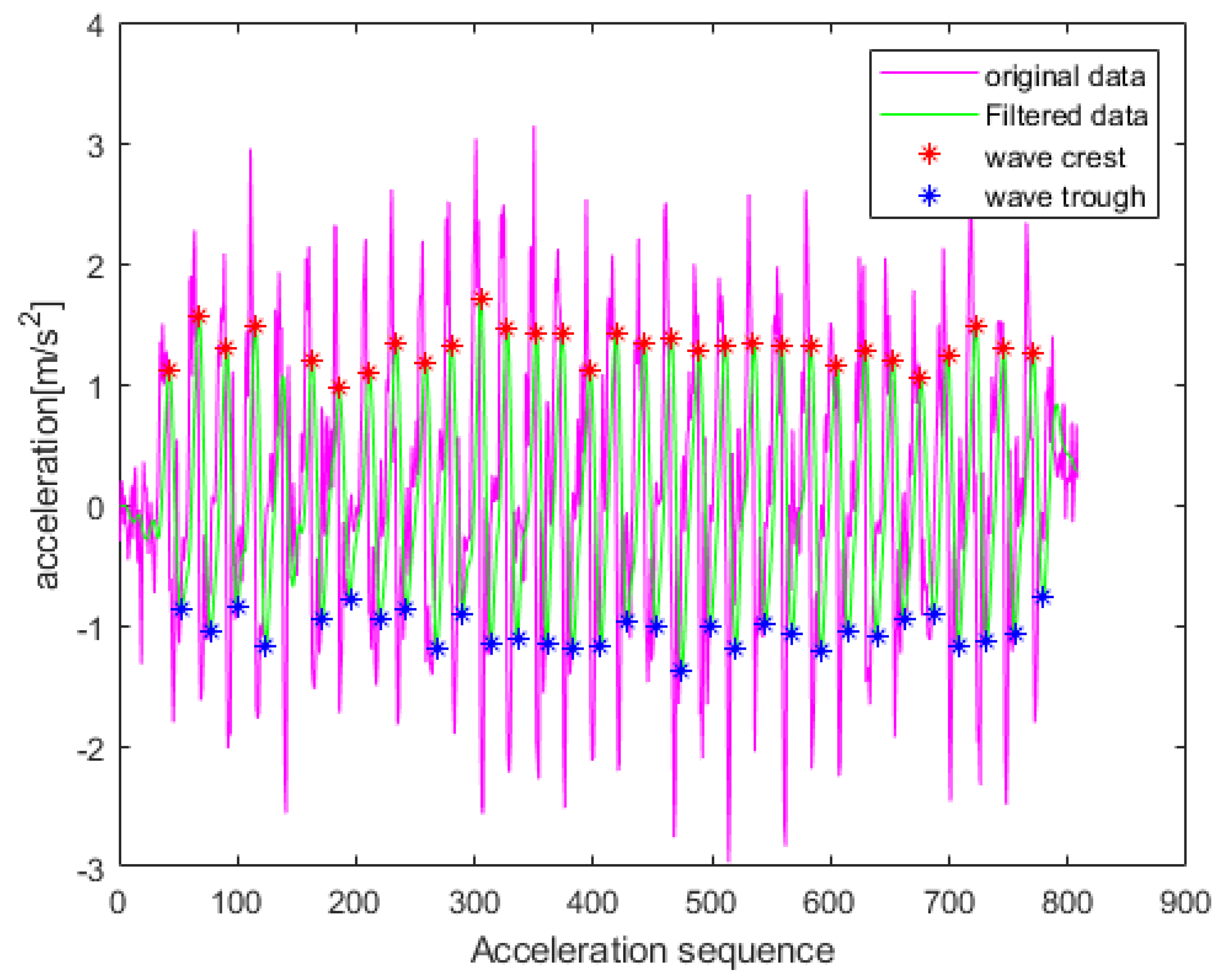
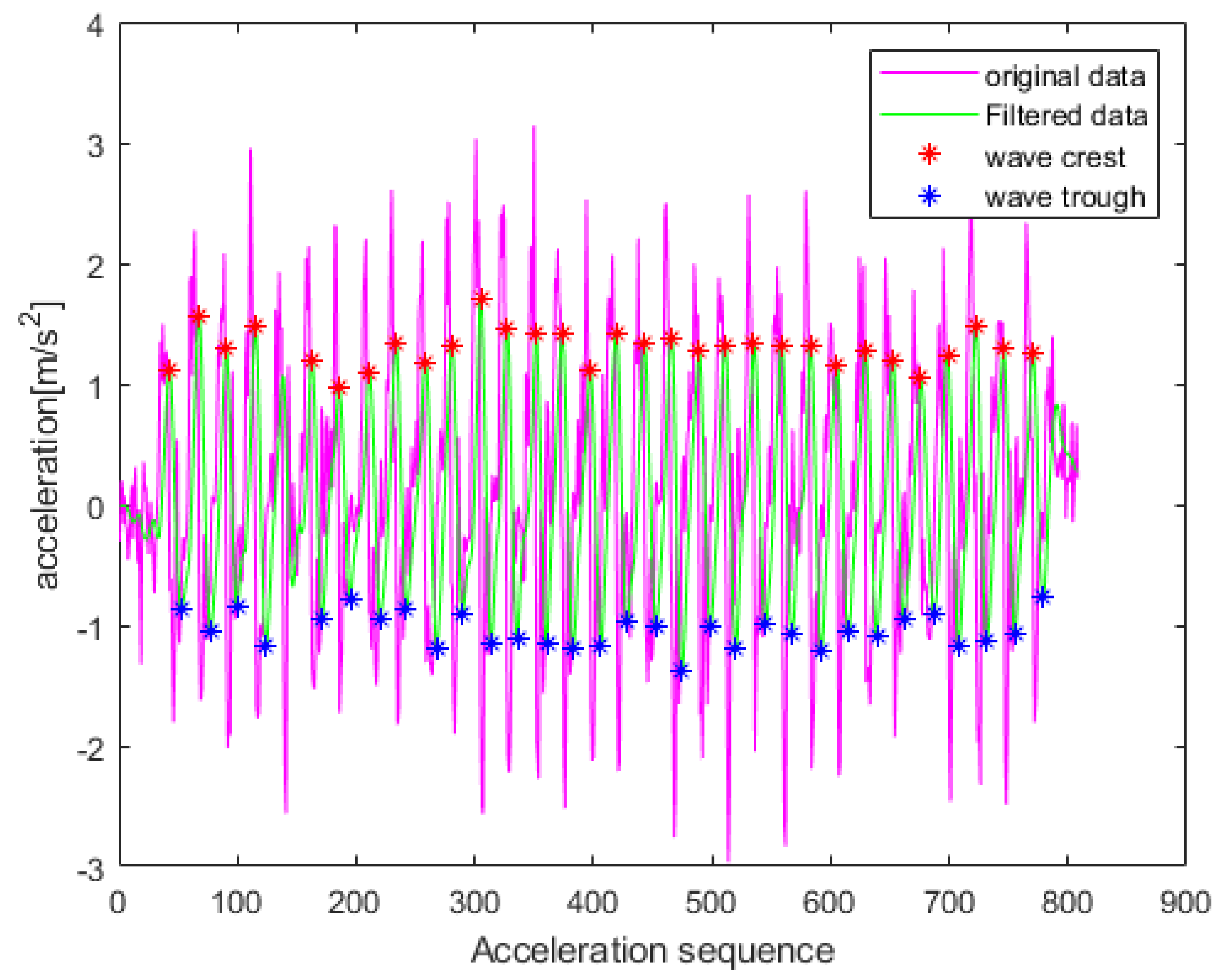
2.1.1. Step Count Estimation
- (1)
- Set the detection threshold based on the low-pass-filtered acceleration signal.
- (2)
- Identify and mark the peak positions. If false peaks are present, use the discrimination method mentioned earlier to reject them. Subtract one from the number of peaks and record the result.
- (3)
- Identify and mark the trough positions. If false troughs are present, use the discrimination method mentioned earlier to reject them. Subtract one from the number of troughs and record the result.
- (4)
- Finally, output the overall number of peaks and troughs. Use their corresponding markers to determine the total number of detected steps.
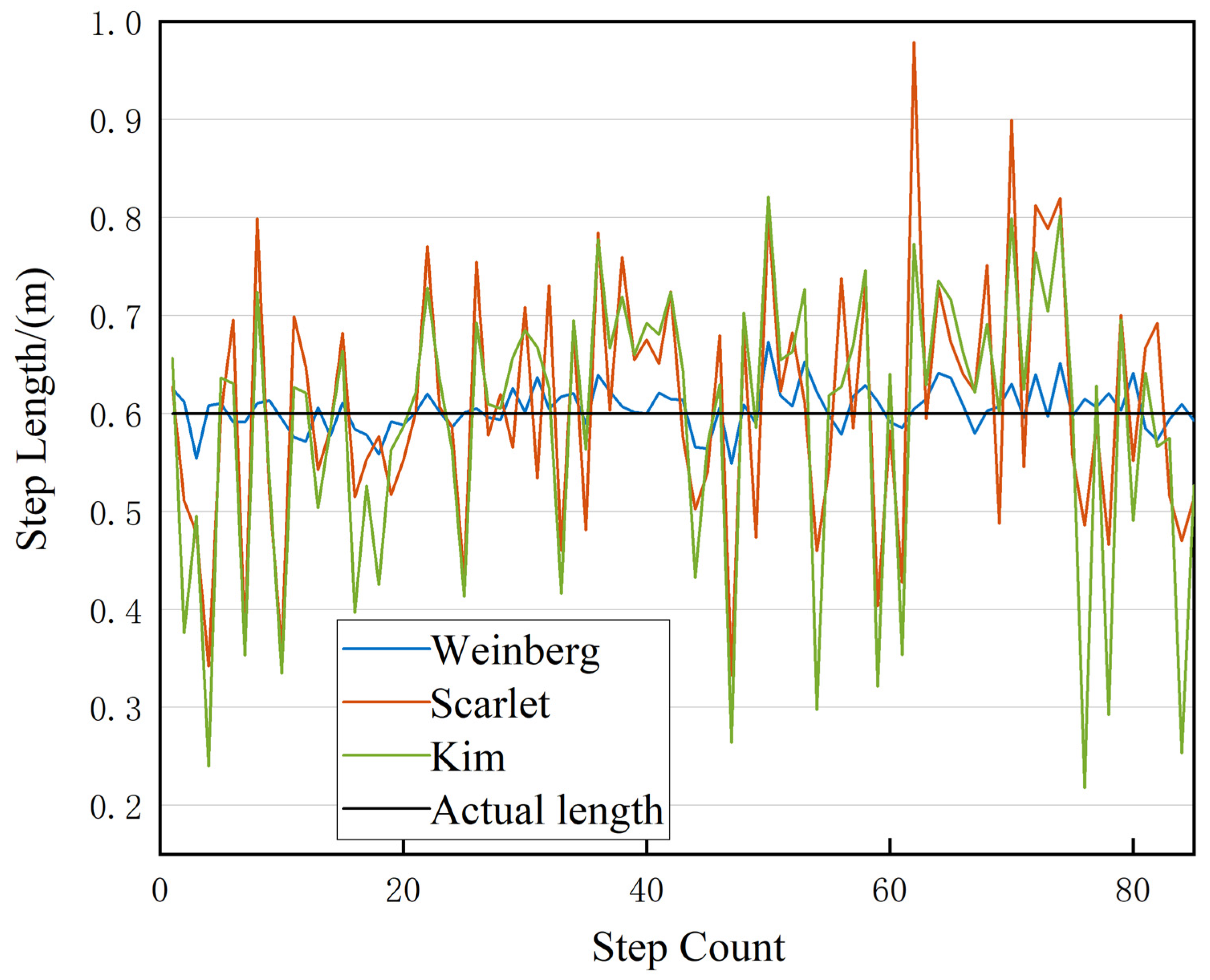
2.1.2. Step Length Estimation
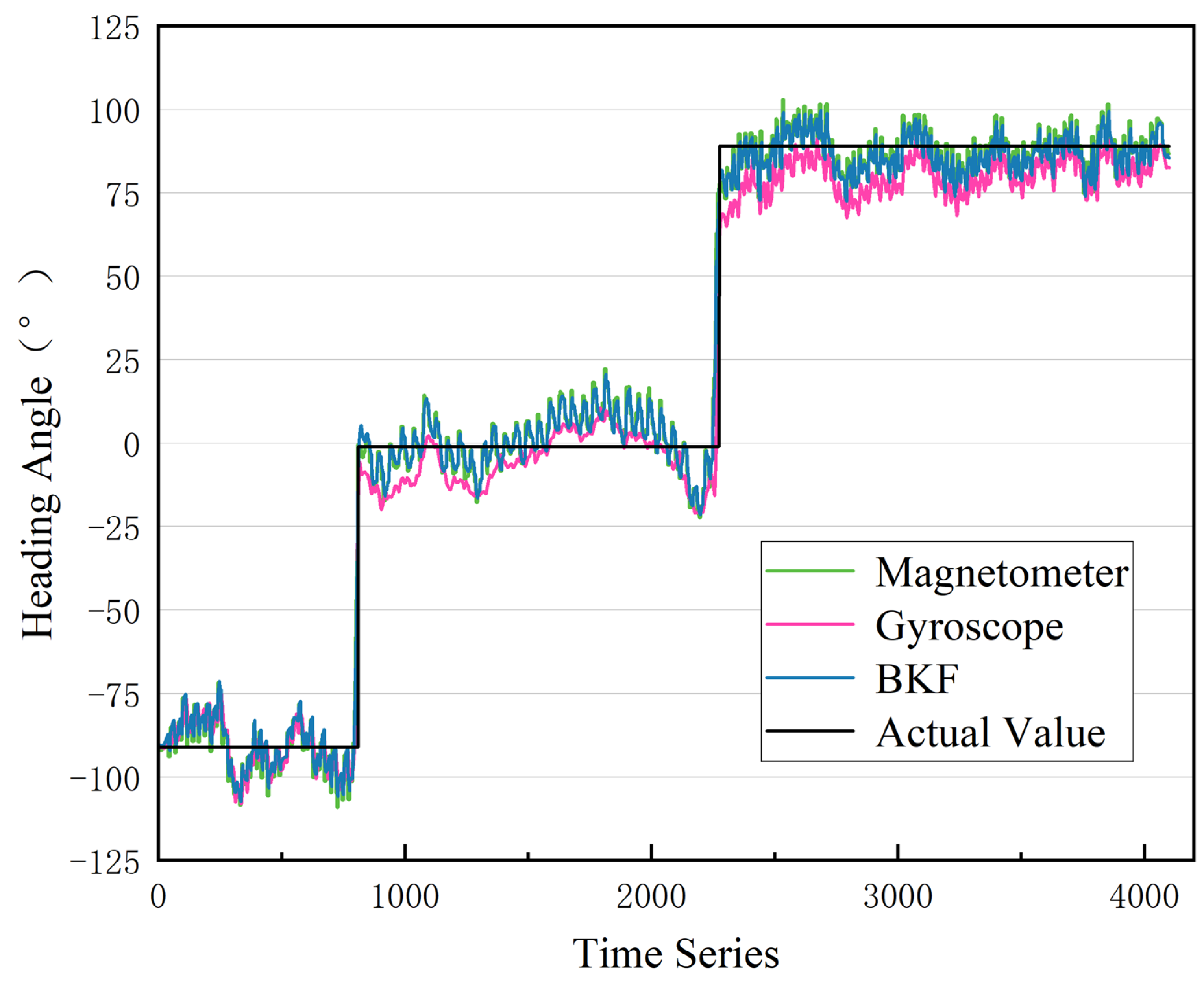
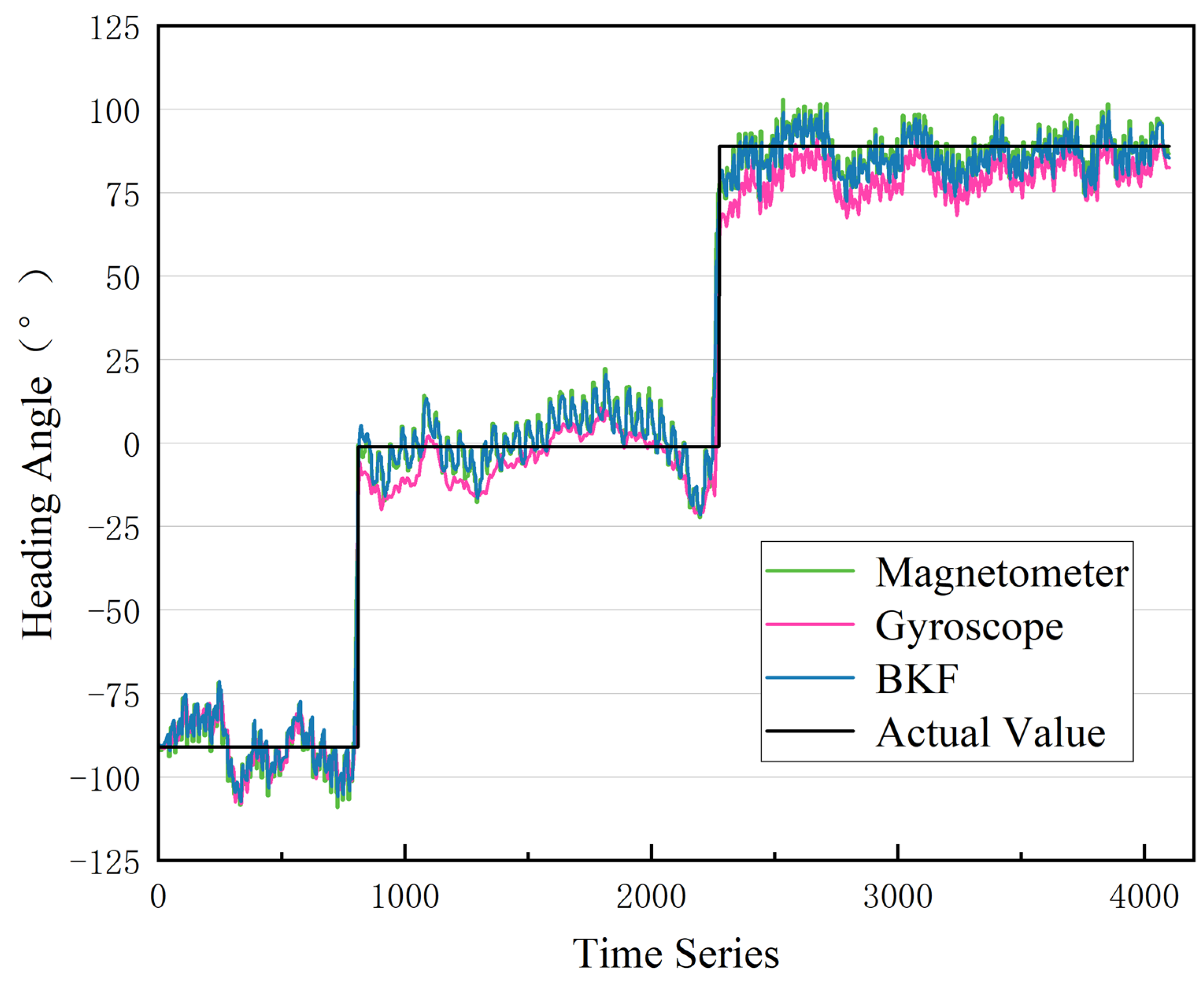
2.1.3. Heading Angle Calculation Based on BKF-WT
2.2. Geomagnetic/Light Intensity Fusion Positioning
2.2.1. Coordinate System Conversion
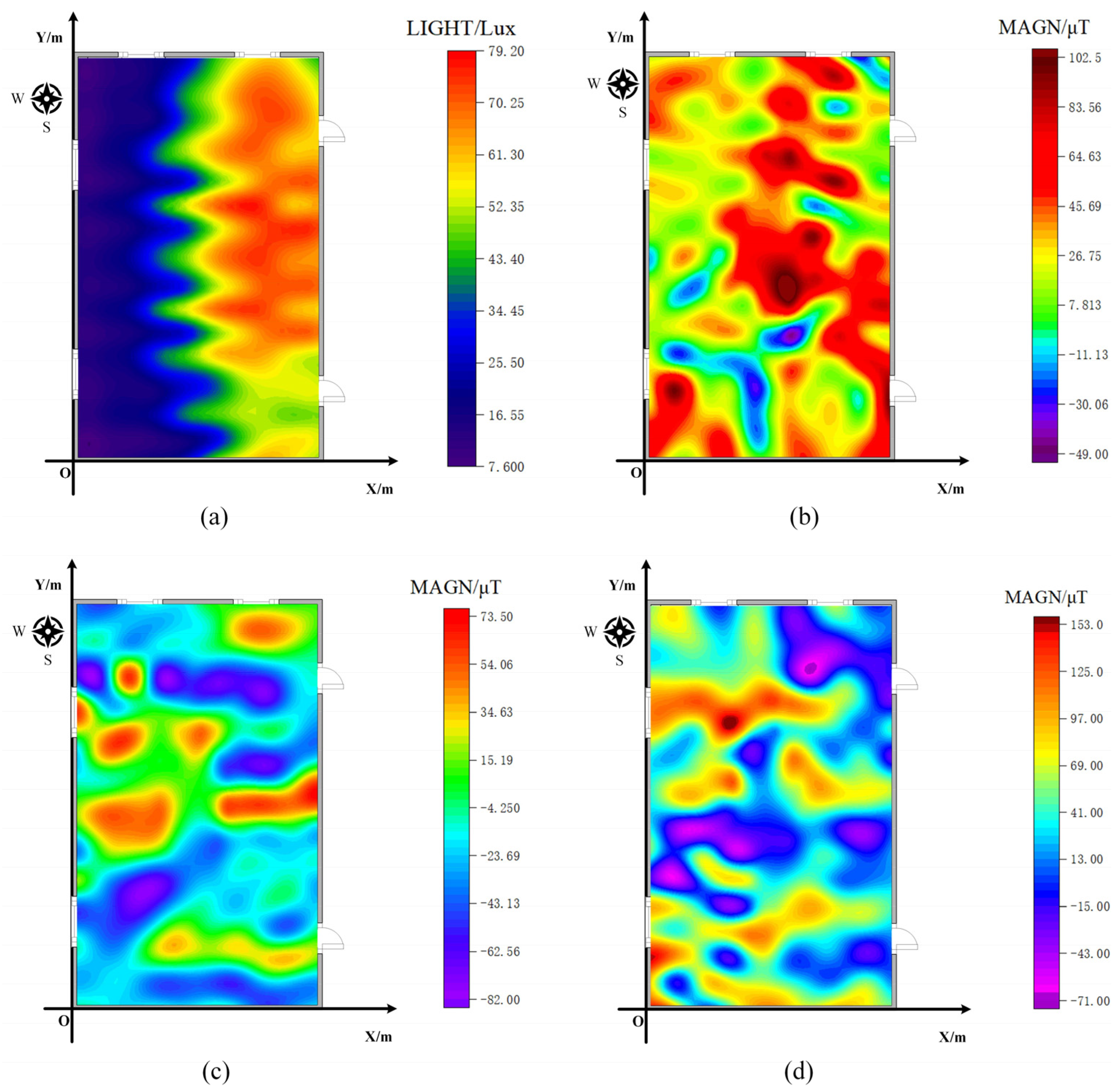
2.2.2. Spatial Interpolation
3. Tent-ASO-BP Model
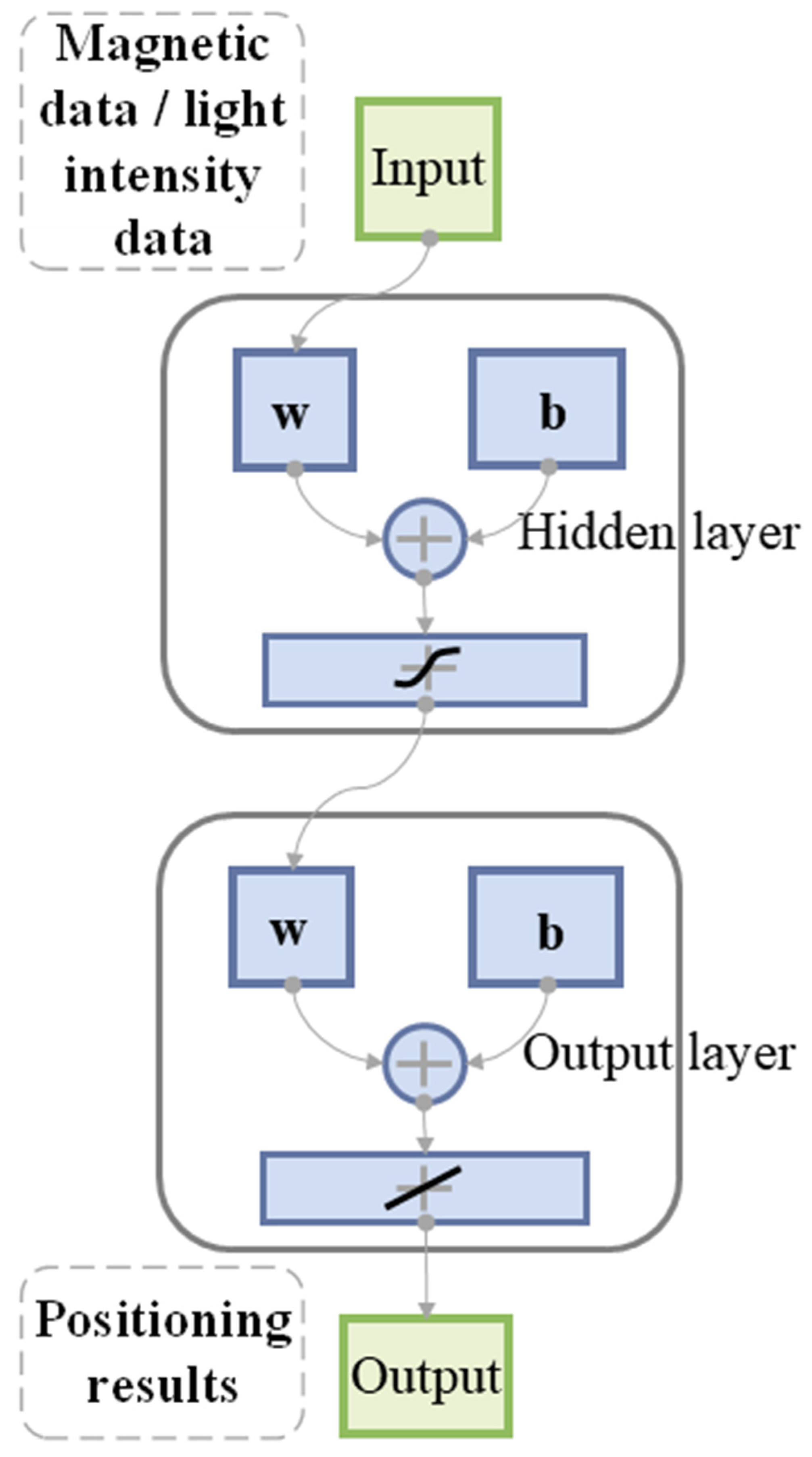
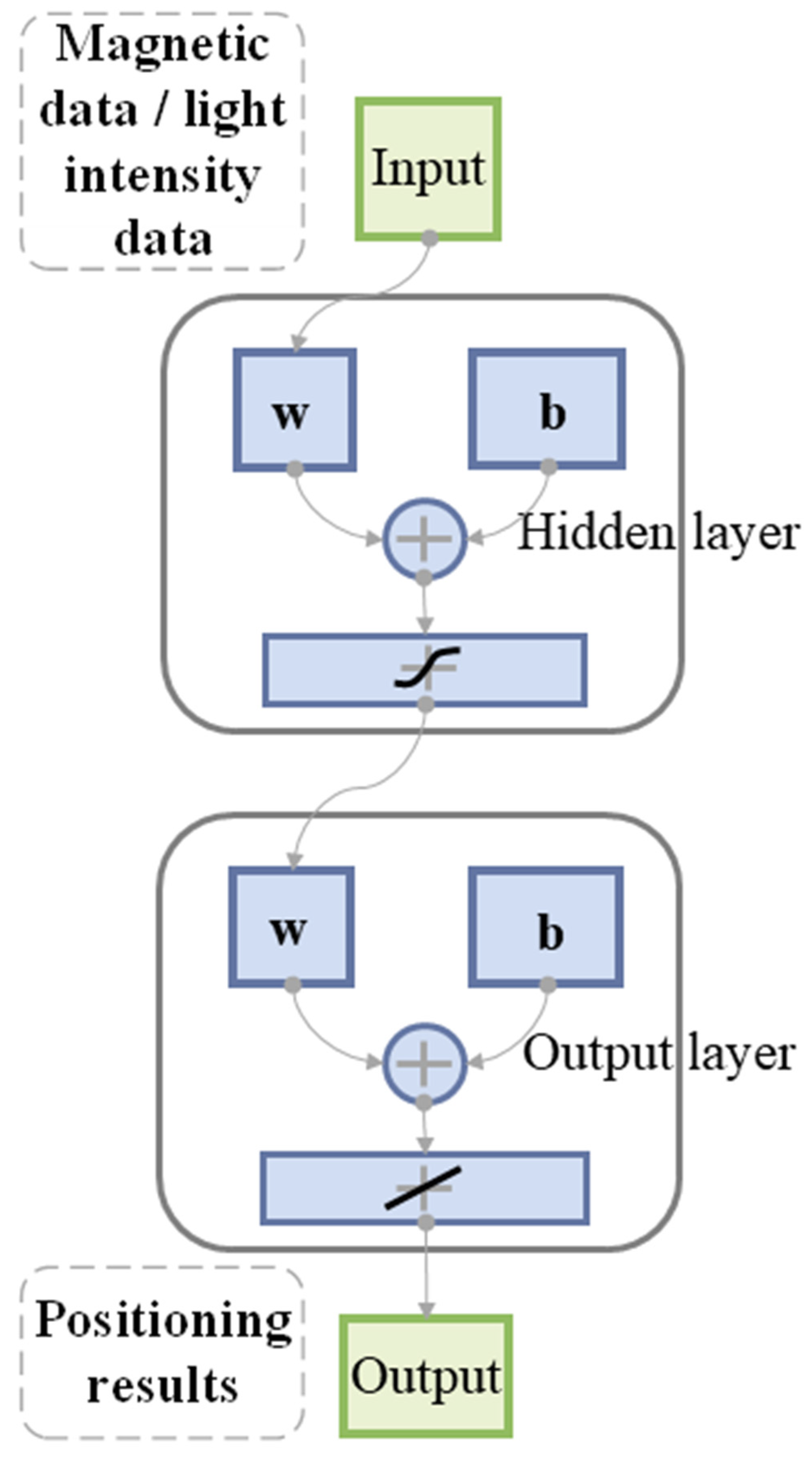
3.1. Backpropagation Neural Network
3.2. ASO Algorithm
3.3. Tent Chaotic Map
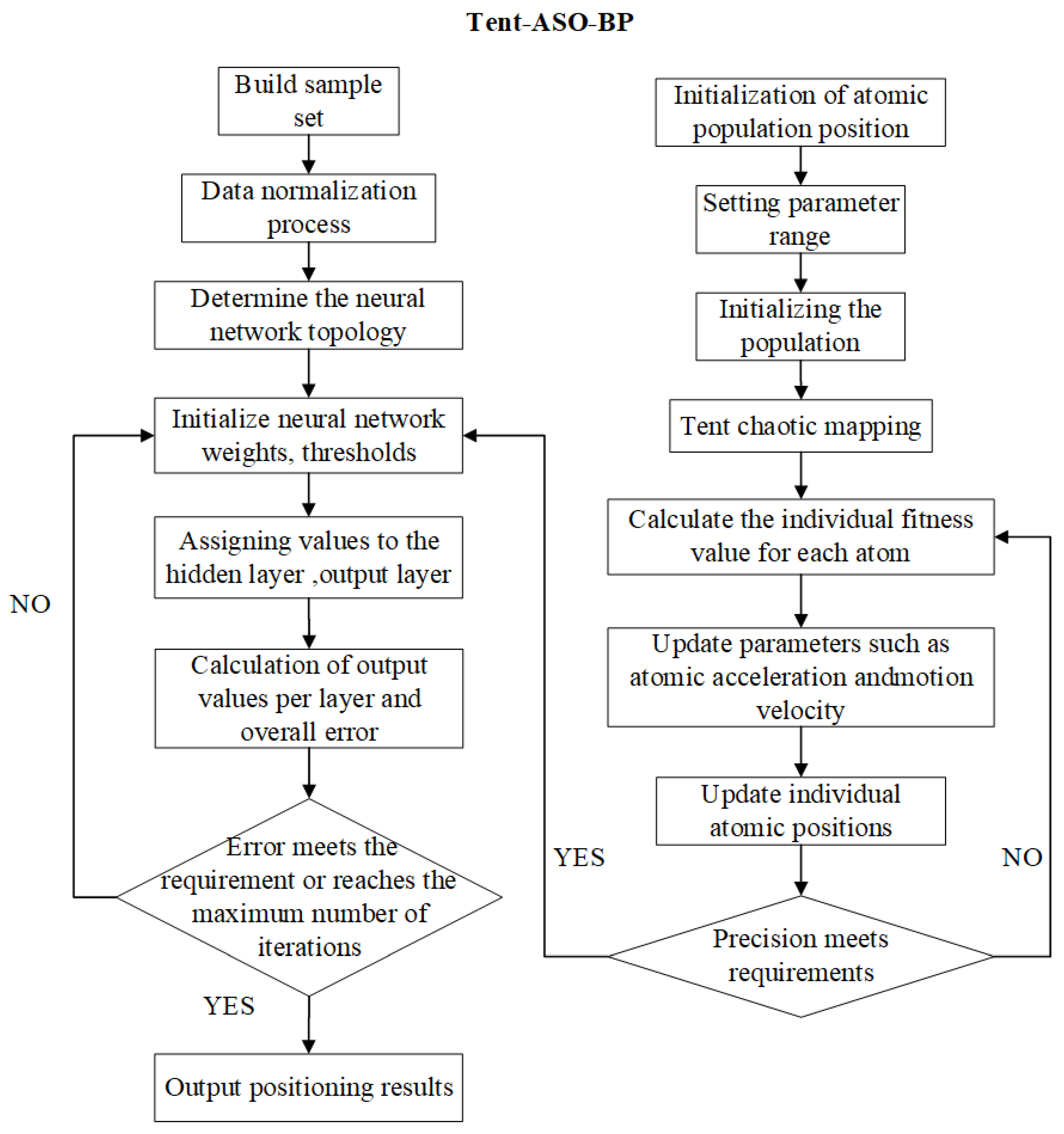
3.4. Tent-ASO-BP Positioning Model
- Step 1:
- Initially, configure the neural network parameters: a maximum training epoch of 1000, a default learning rate of 0.01, and a momentum factor of 0.5. Subsequently, initialize the atom population size and set the hyperparameter range for each atom, specifying an initial population of 30, a maximum iteration count of 500, and a search dimensionality of 30.
- Step 2:
- Generate chaotic sequences using Tent mapping to regenerate the initialized atomic population positions.
- Step 3:
- Determine the fitness function of the atom and calculate it to obtain the current optimal position of the atom and the optimal solution. In this paper, the positioning accuracy is used as the fitness function, and the expression is shown in Equation (31):where N is the number of sample points in the database; and are the coordinates of the i-th sample prediction locus; and and are their actual coordinates, respectively.
- Step 4:
- Calculate the individual acceleration, velocity, and position update of the atom according to Equations (28) and (29).
- Step 5:
- After updating, calculate the fitness of the atomic individuals again to obtain the optimal position and the optimal solution.
- Step 6:
- Set the iteration termination criteria. If the optimal fitness is achieved or the maximum number of iterations is reached, terminate the iteration and output the optimal position of the atomic individual. If not, repeat Steps 2–5.
- Step 7:
- Execute recurrent prediction in the BP neural network using the weight thresholds optimized in the previous steps to obtain the best performing position model.
- Step 8:
- Use input sample sets and test sets to evaluate its position performance. Derive final position results and position errors after inverse normalization of the data. The flow chart of the algorithm is depicted in Figure 7.
4. Experiments and Results
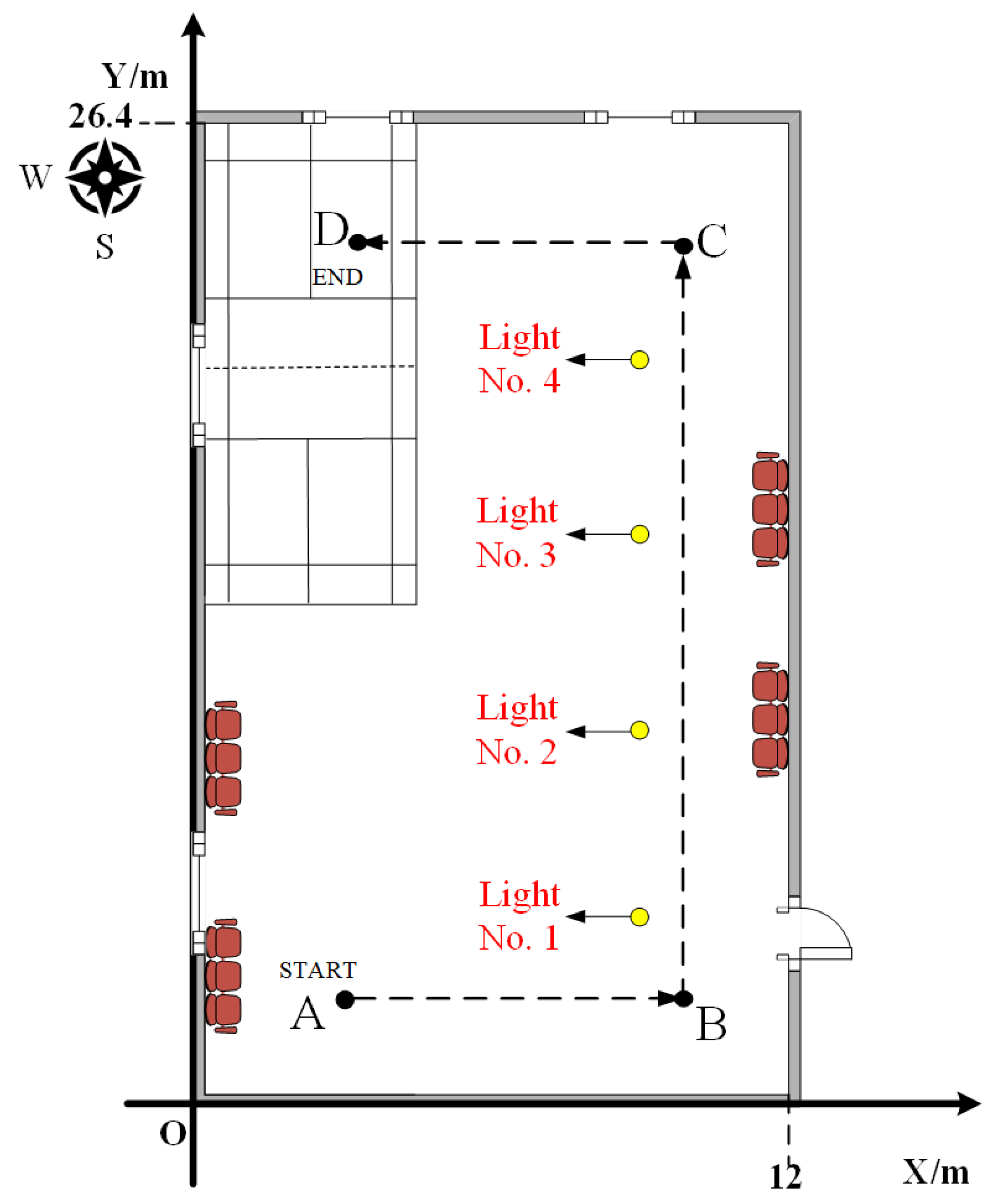
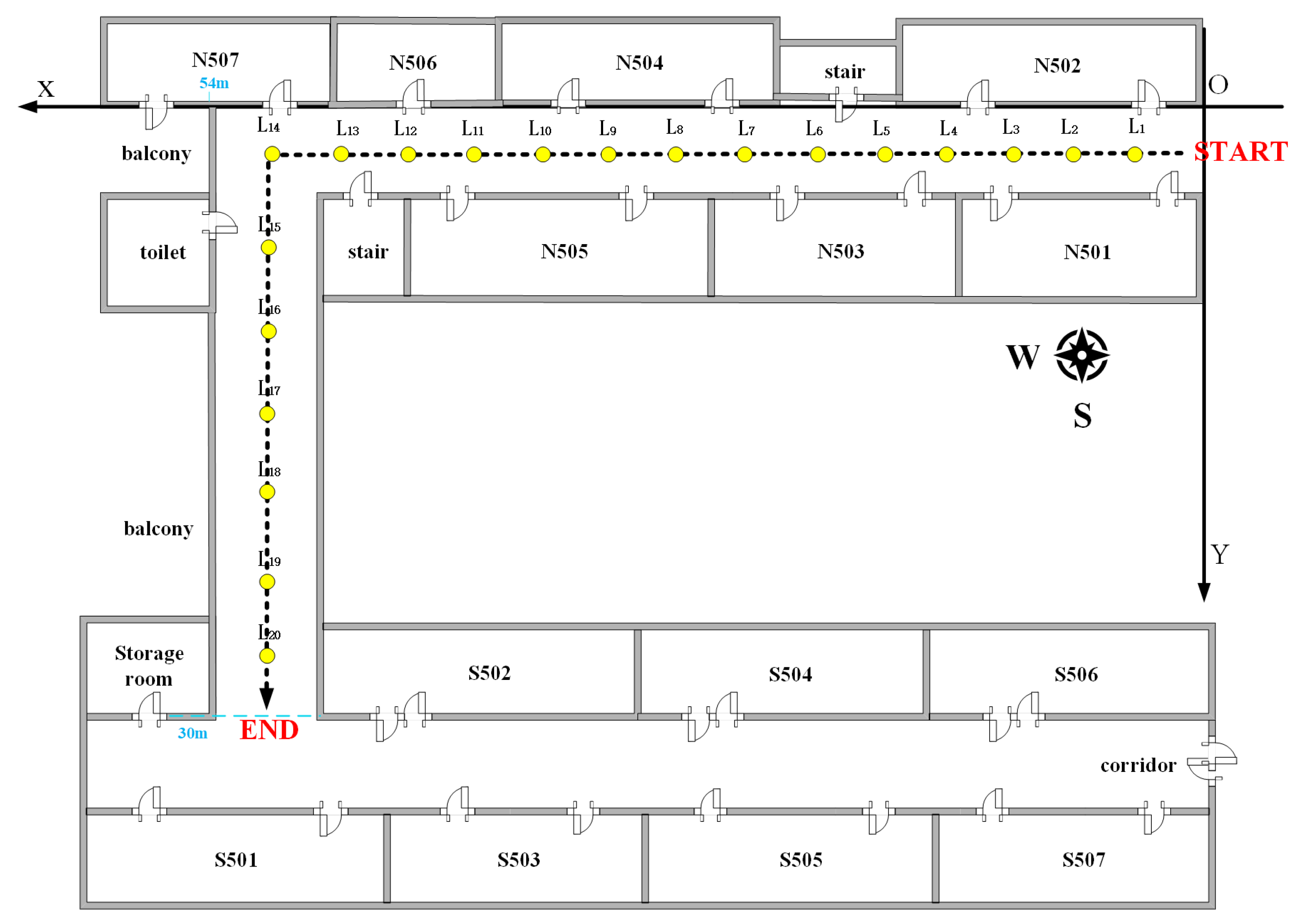
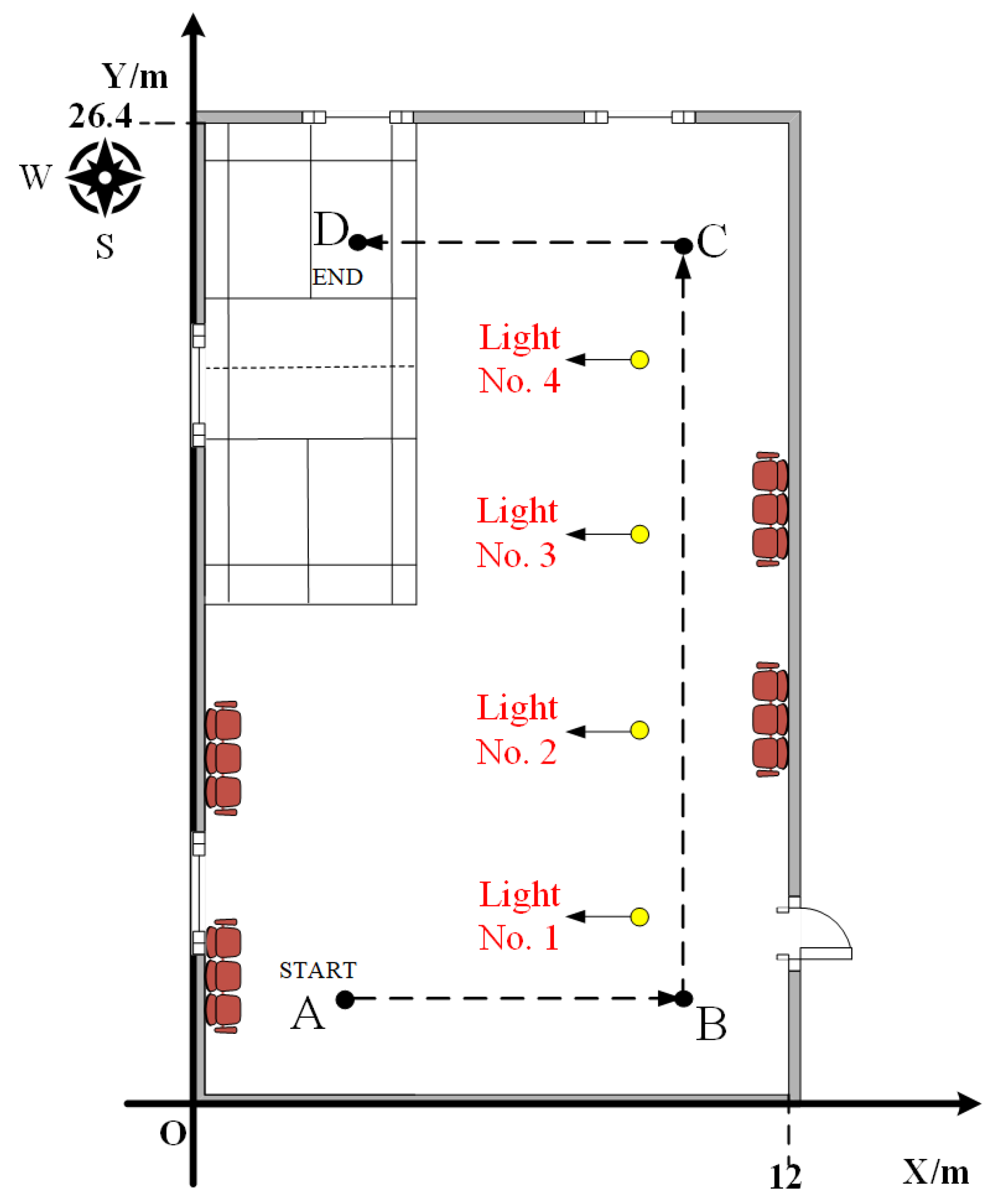
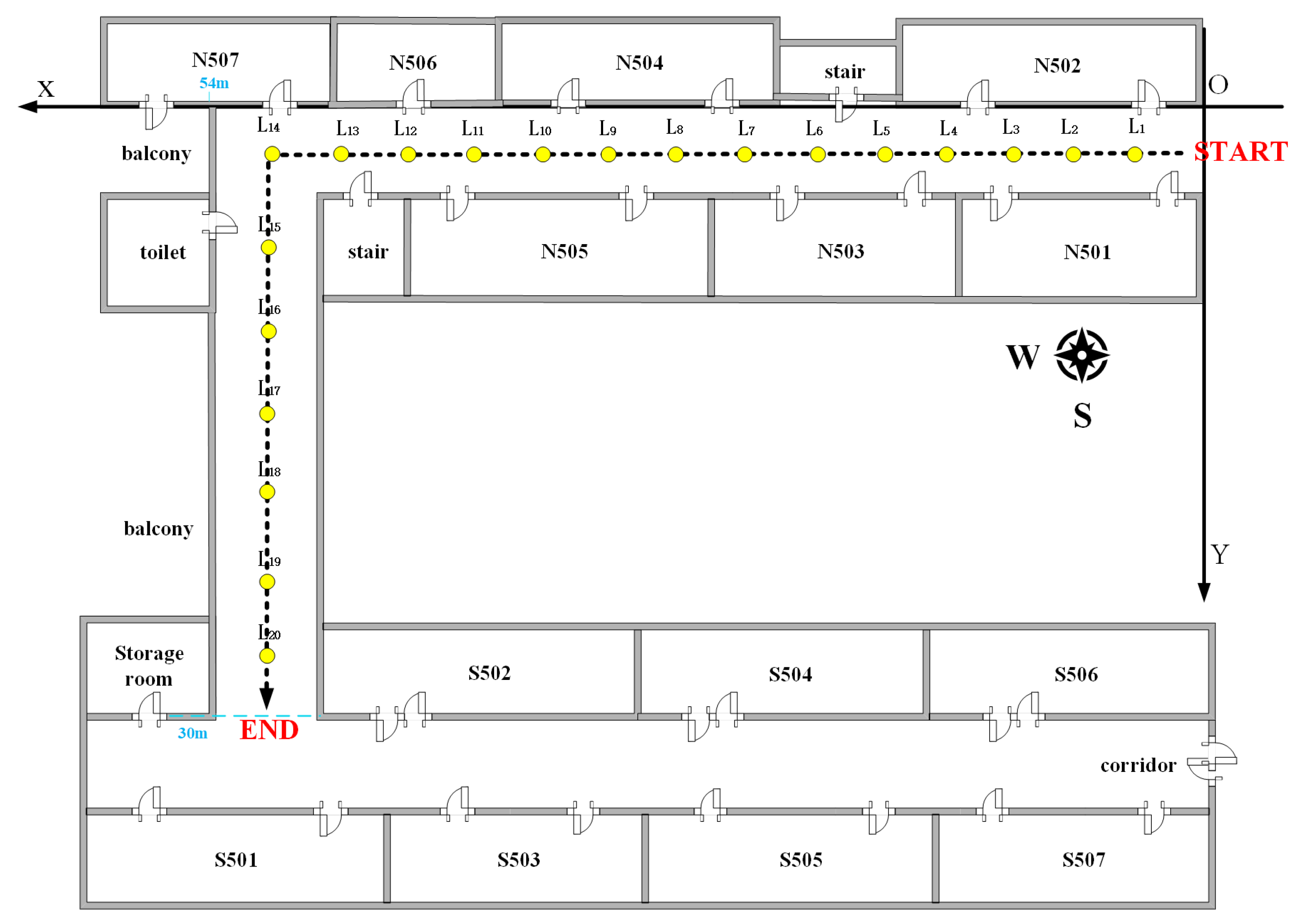
4.1. Experimental Environment
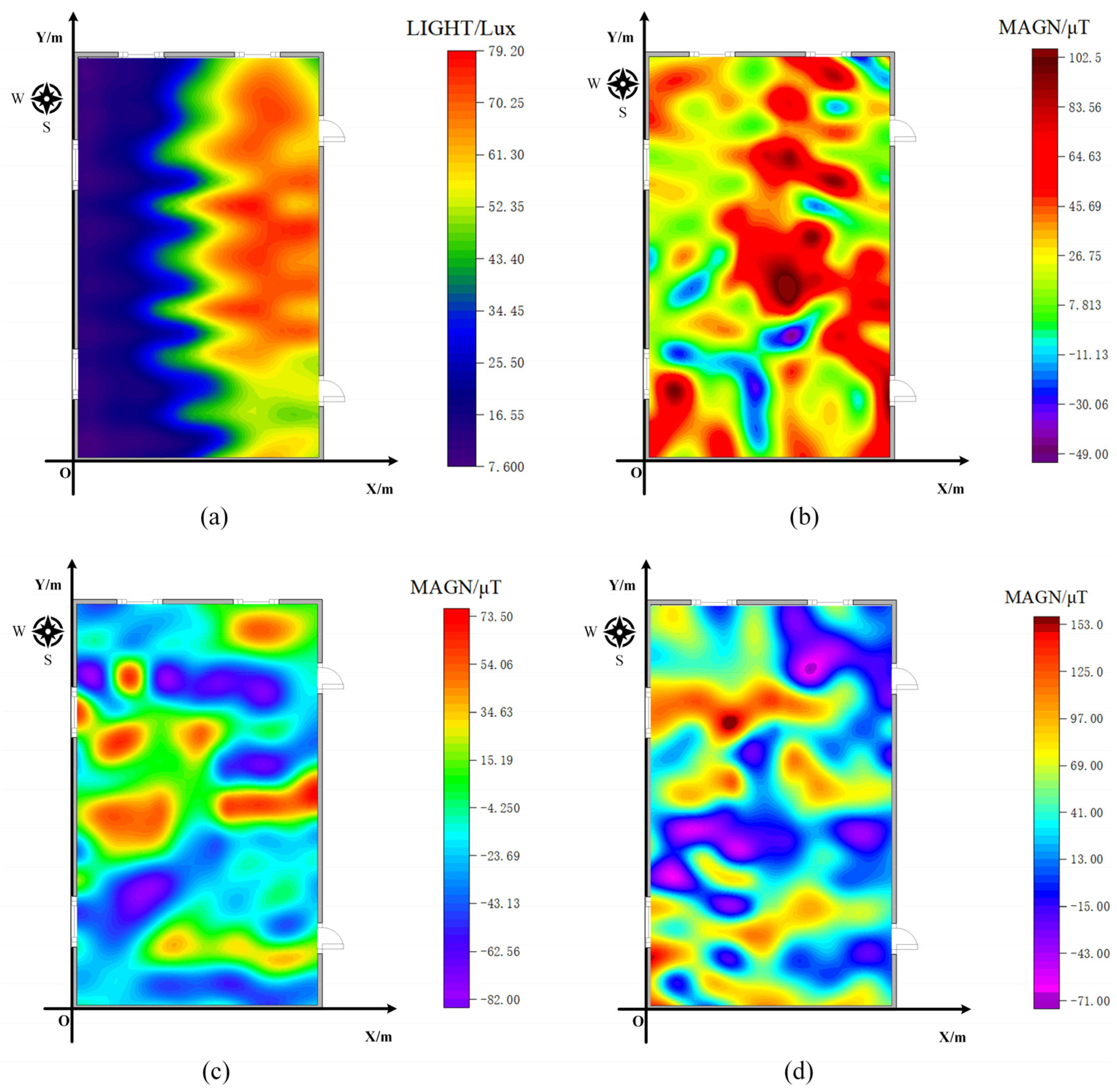
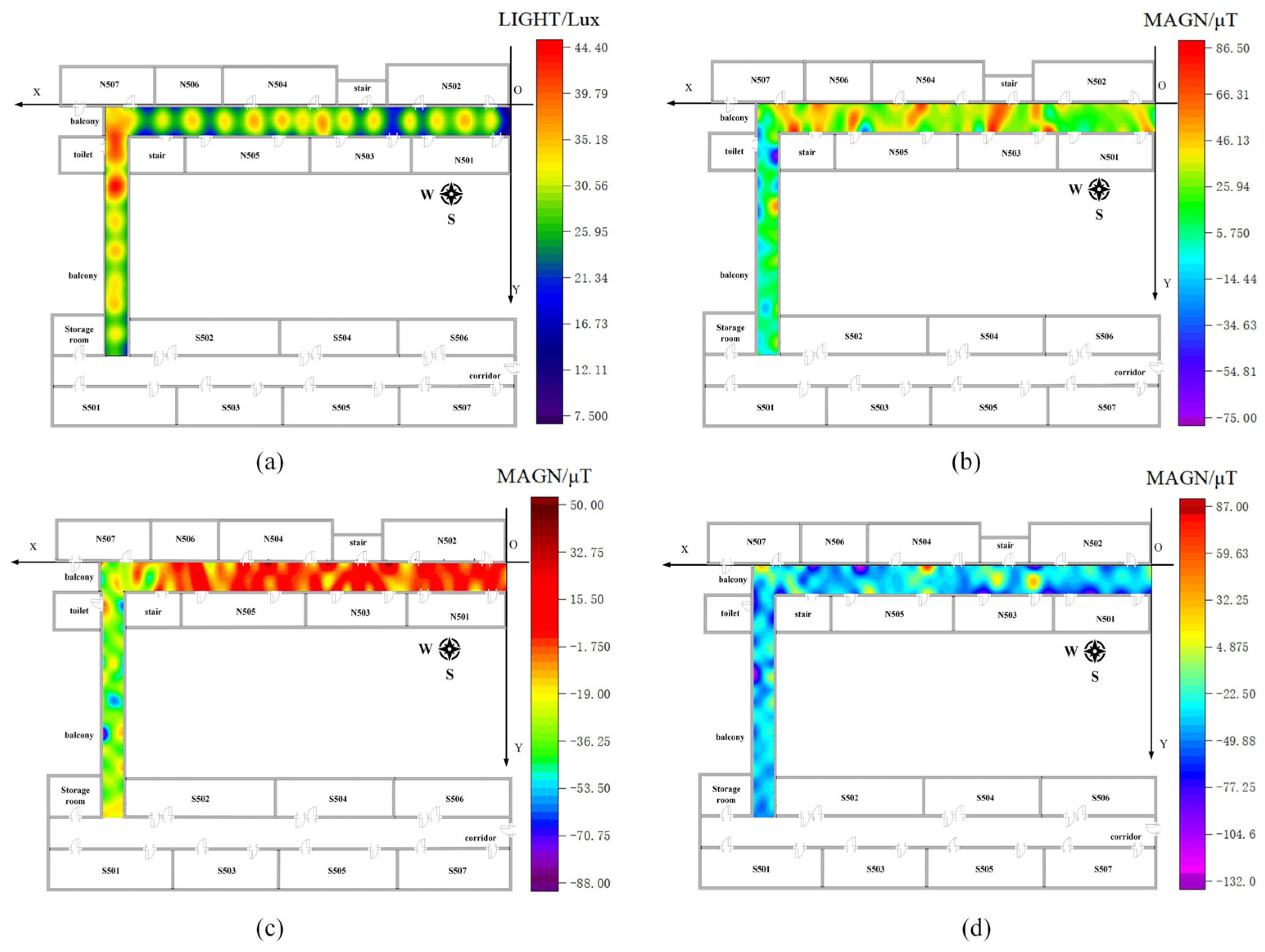
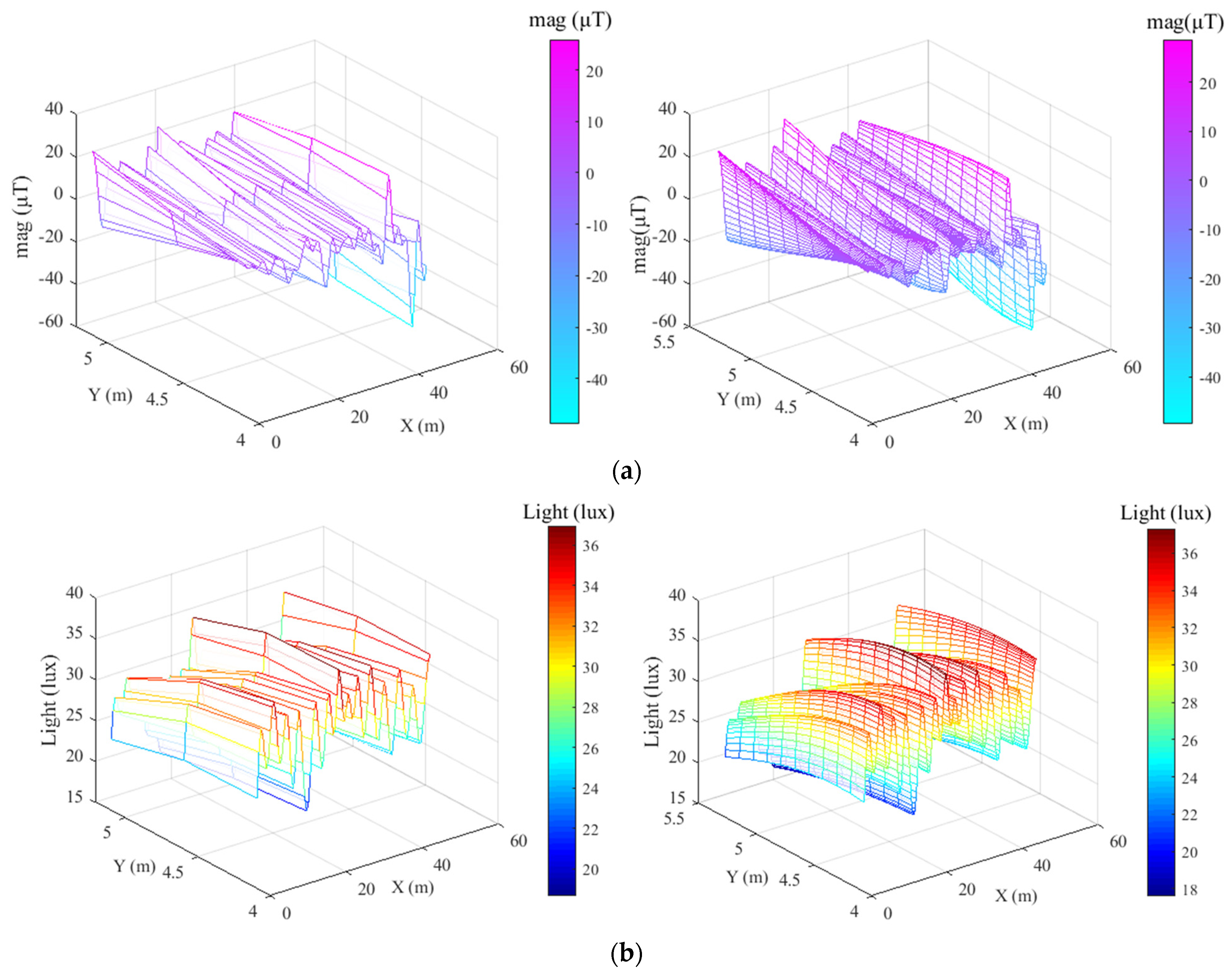
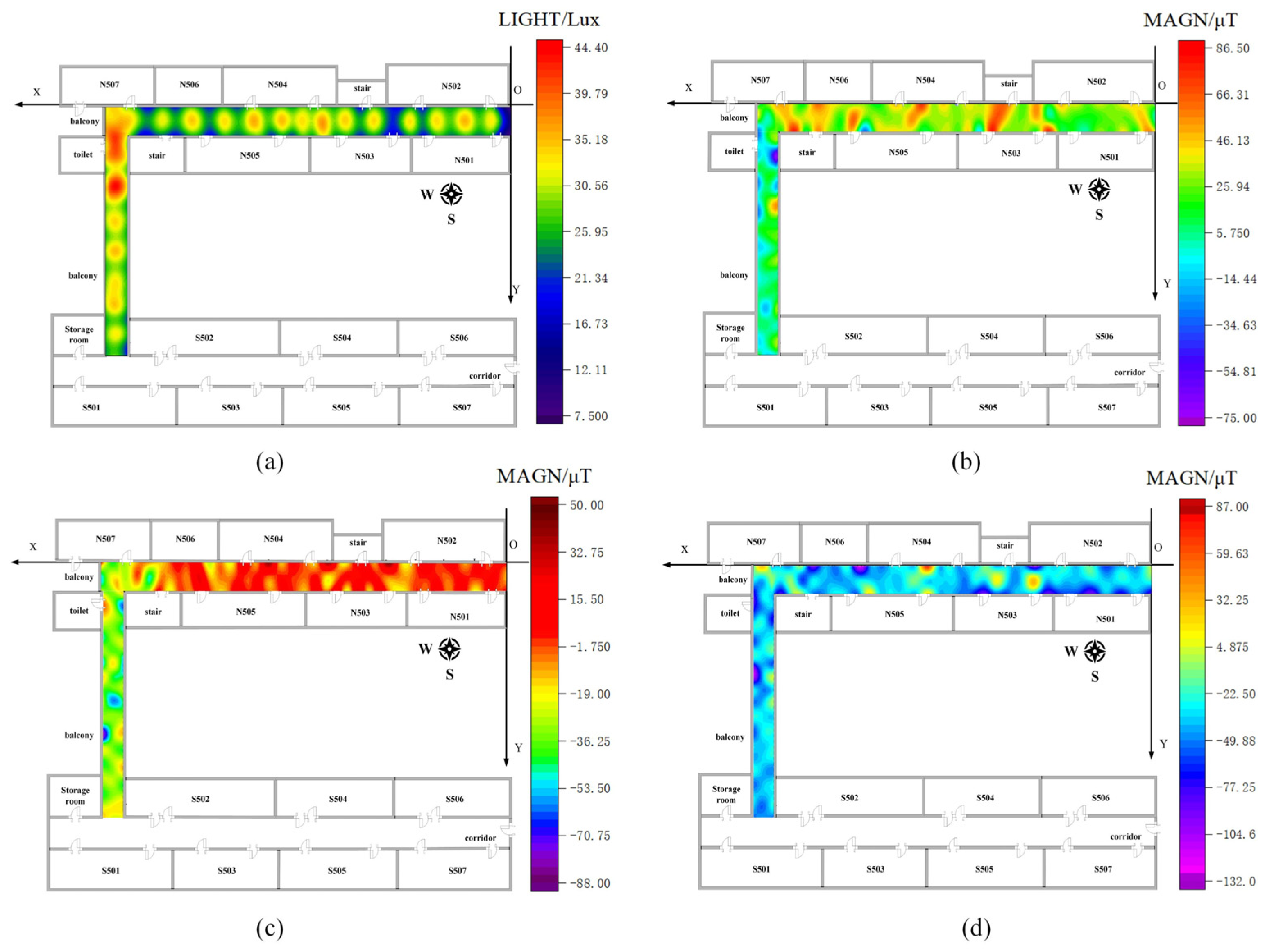
4.2. Geomagnetic/Light Intensity Fingerprint Library Construction
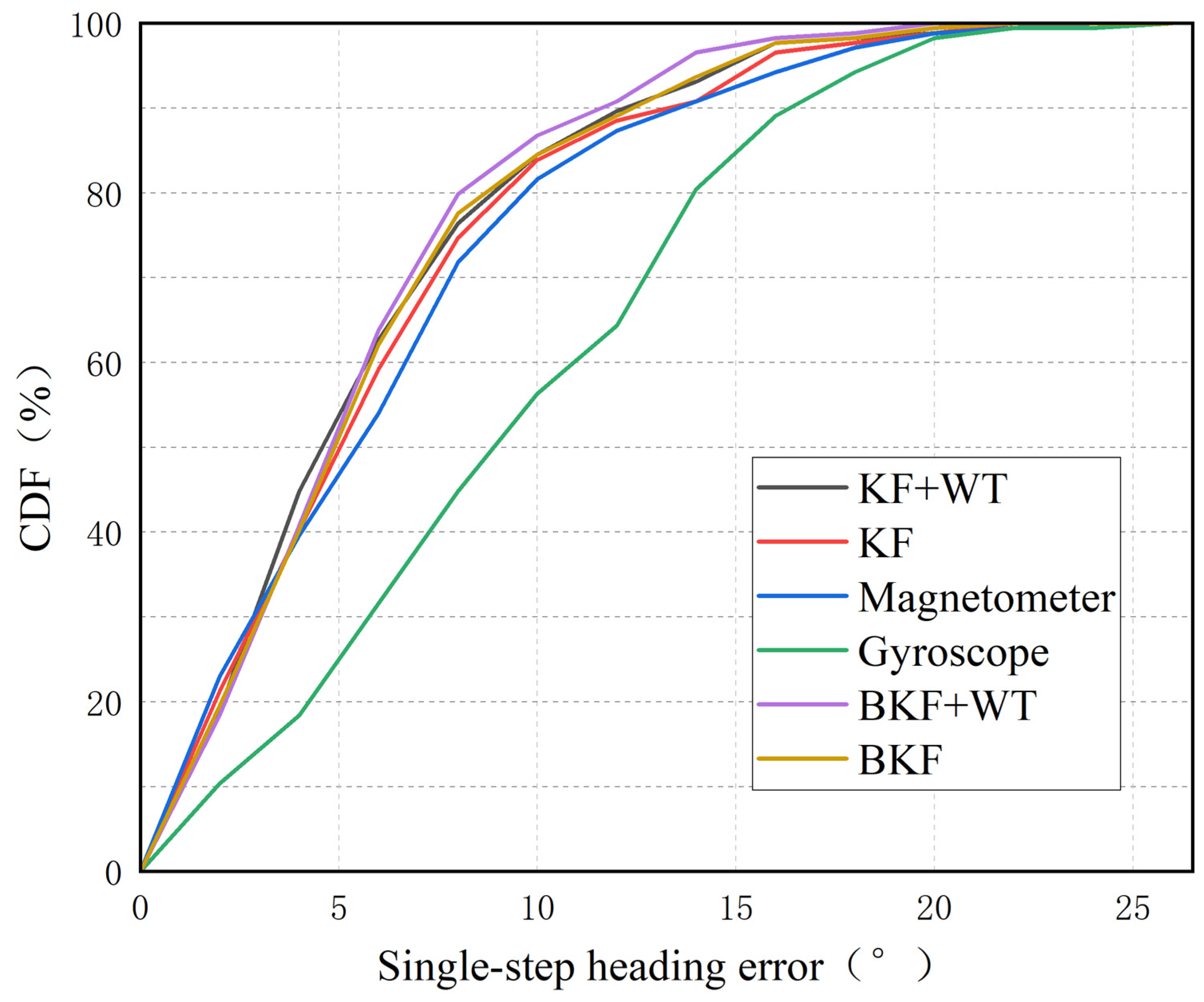
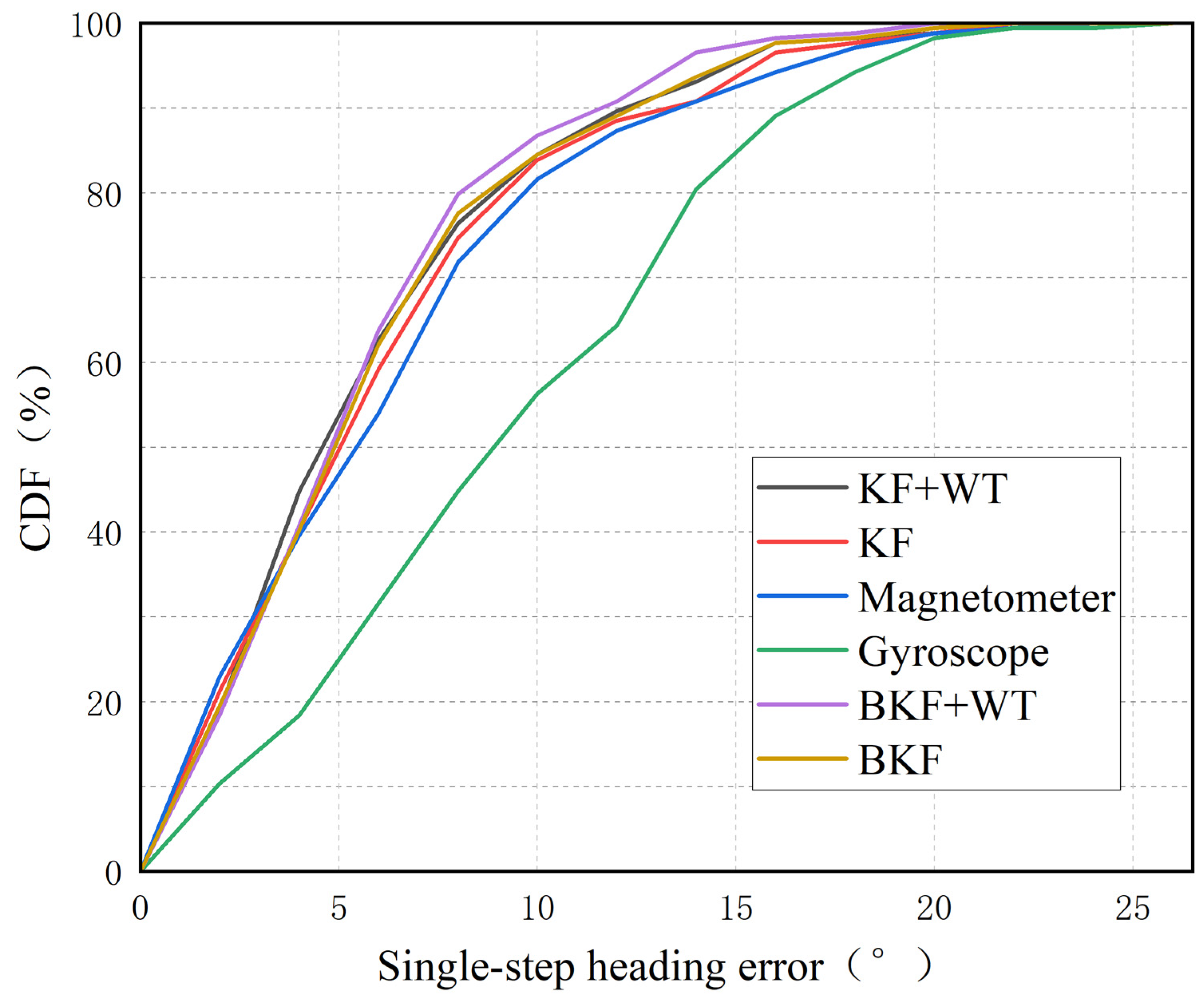
4.3. Accuracy Experiment of Heading Angle
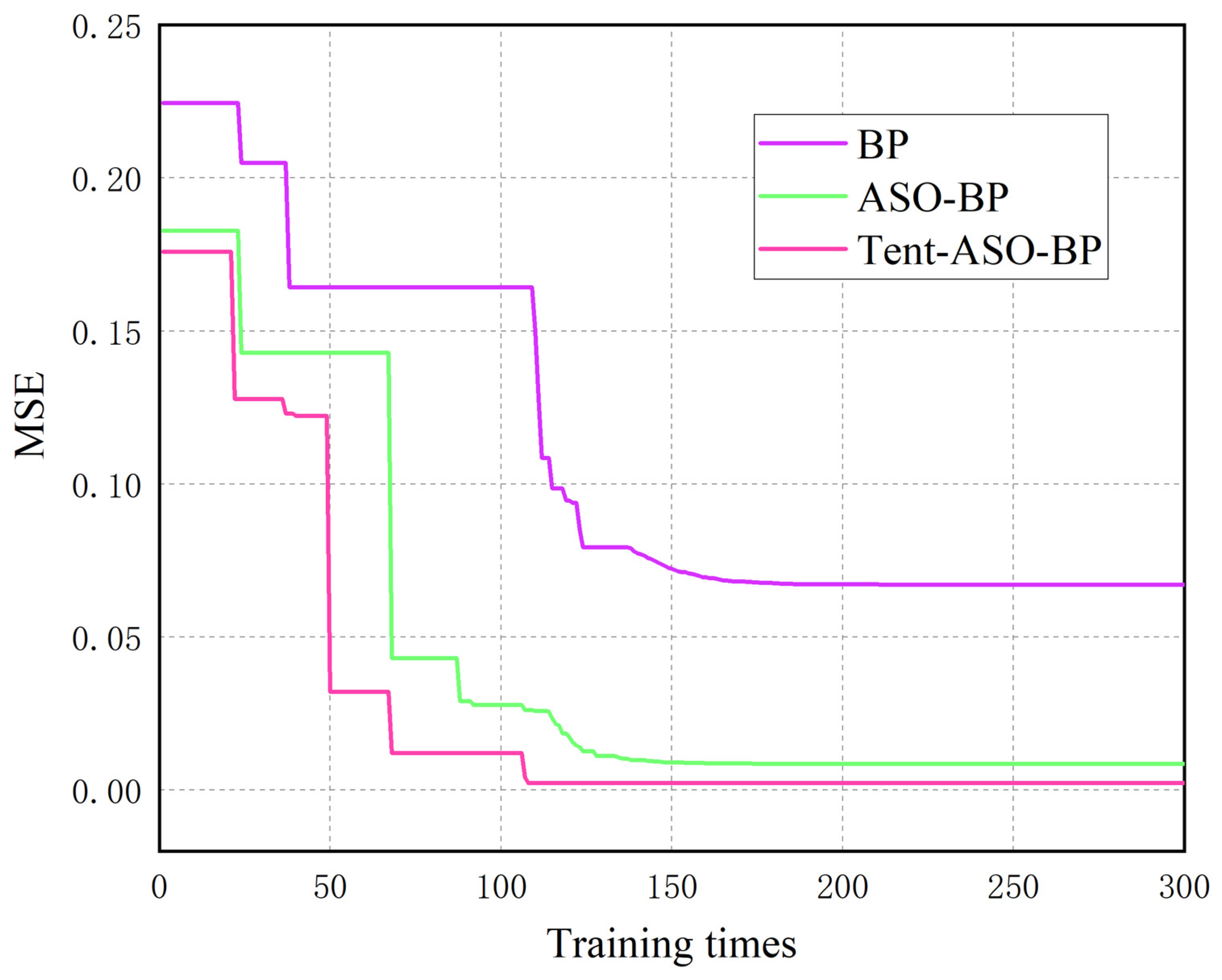
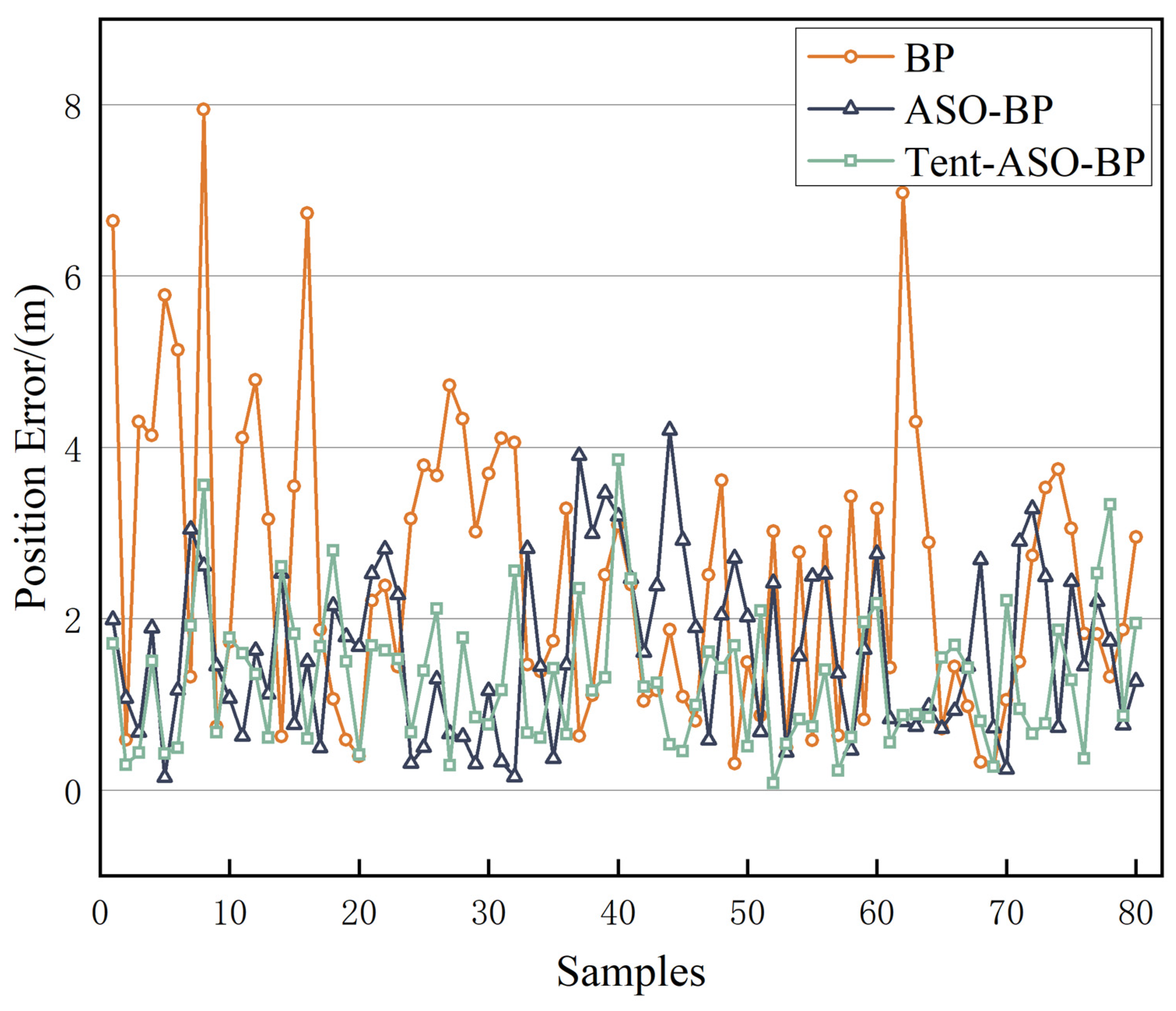
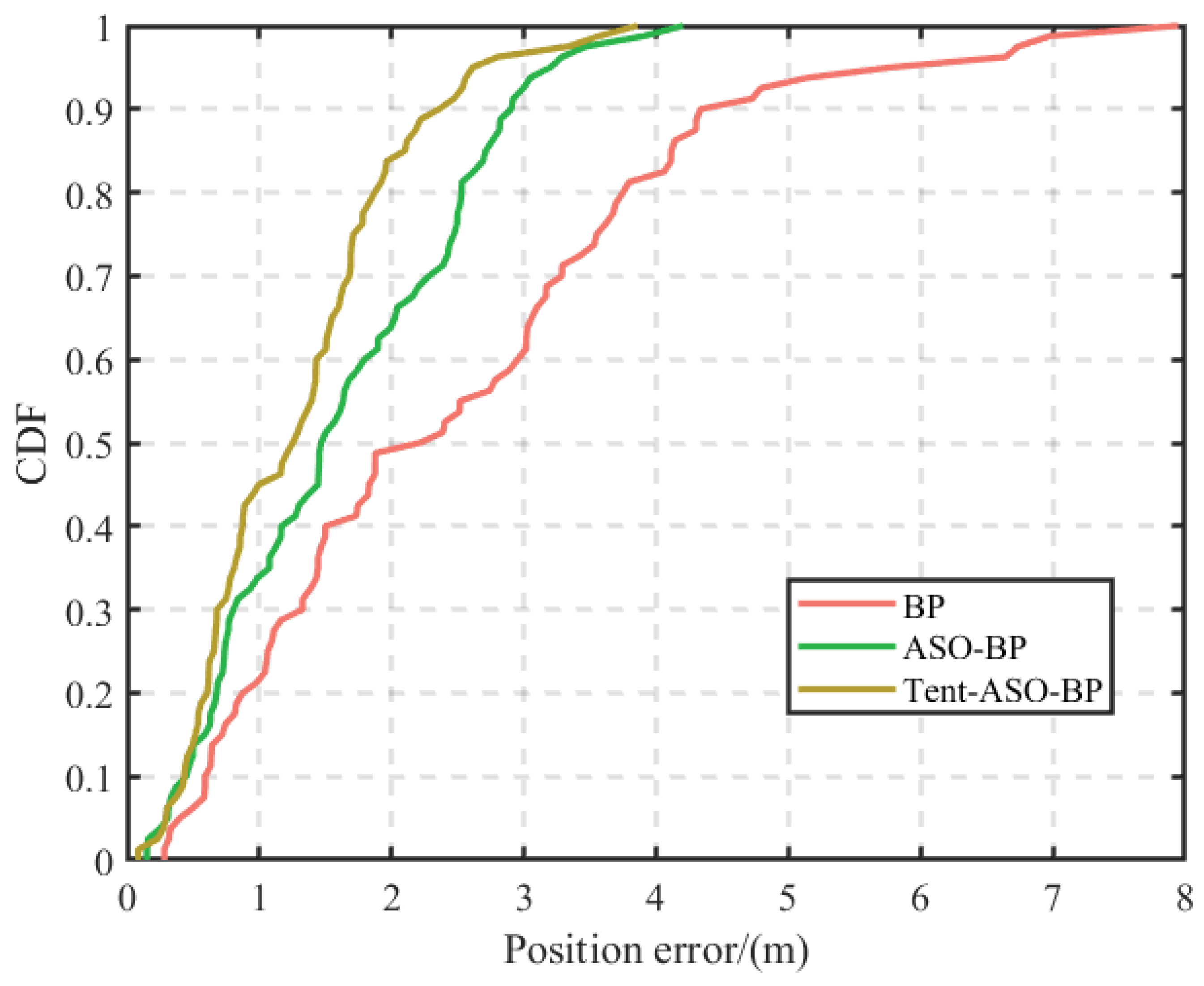
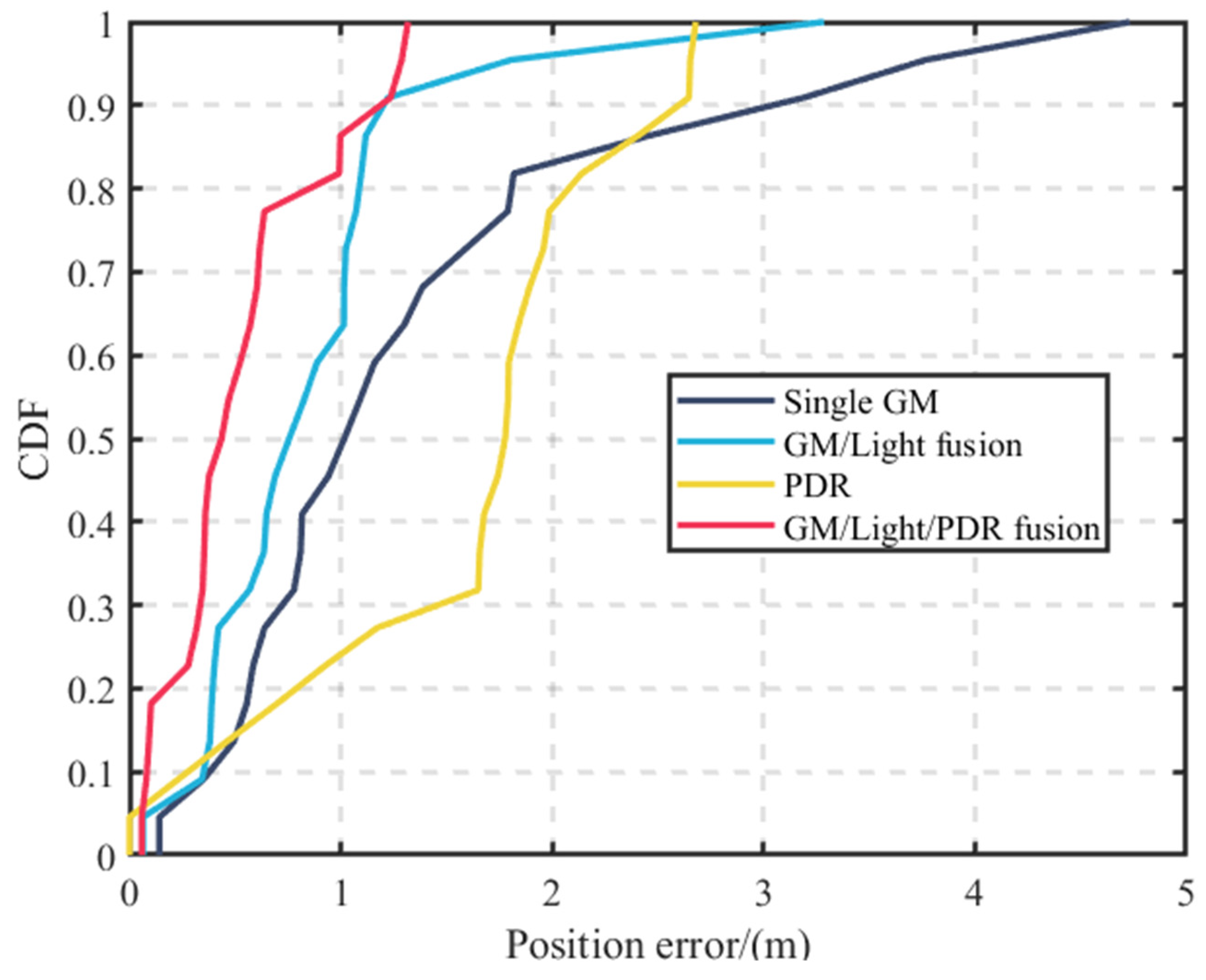
4.4. Performance Experiments of the Position Algorithm
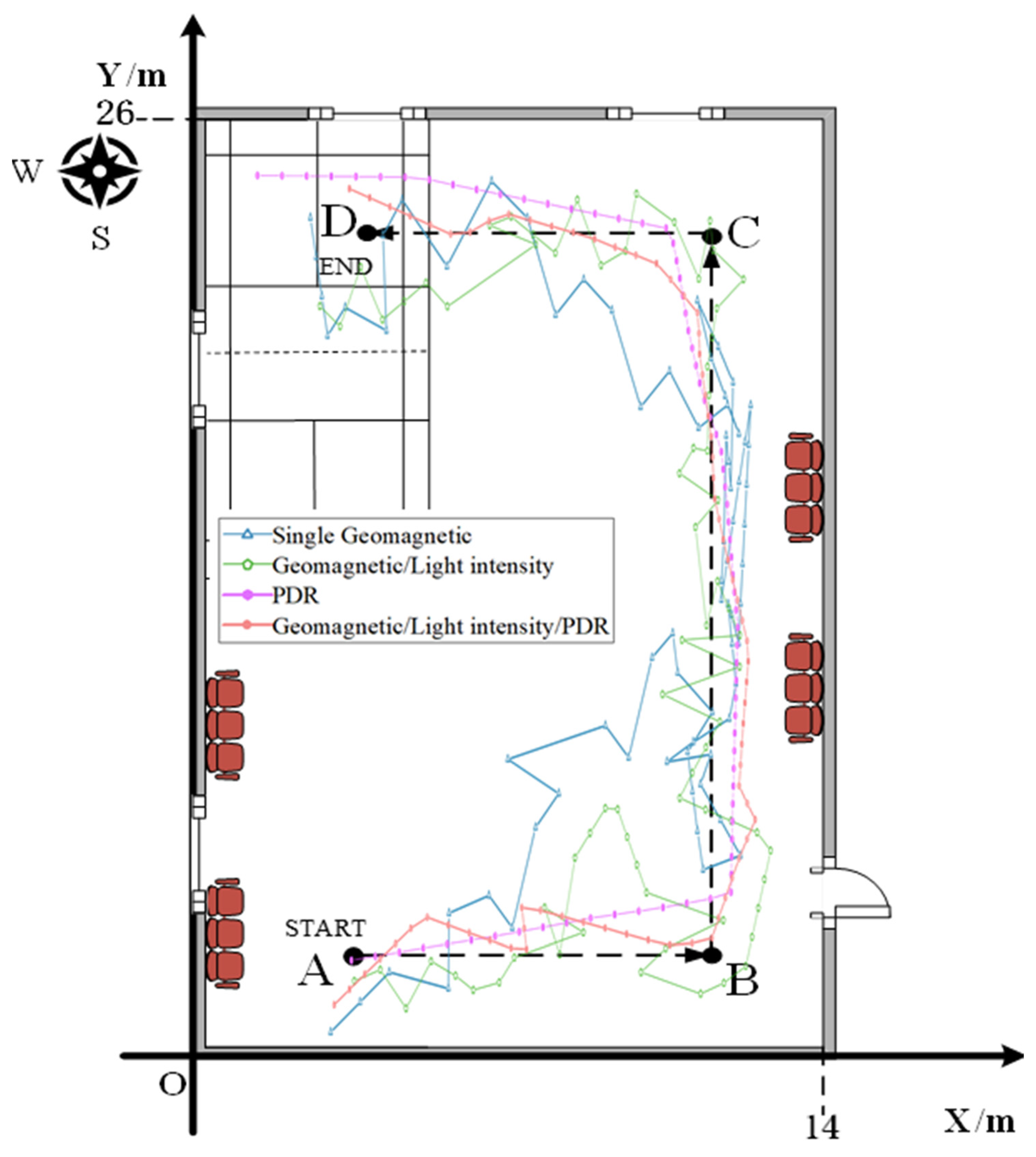
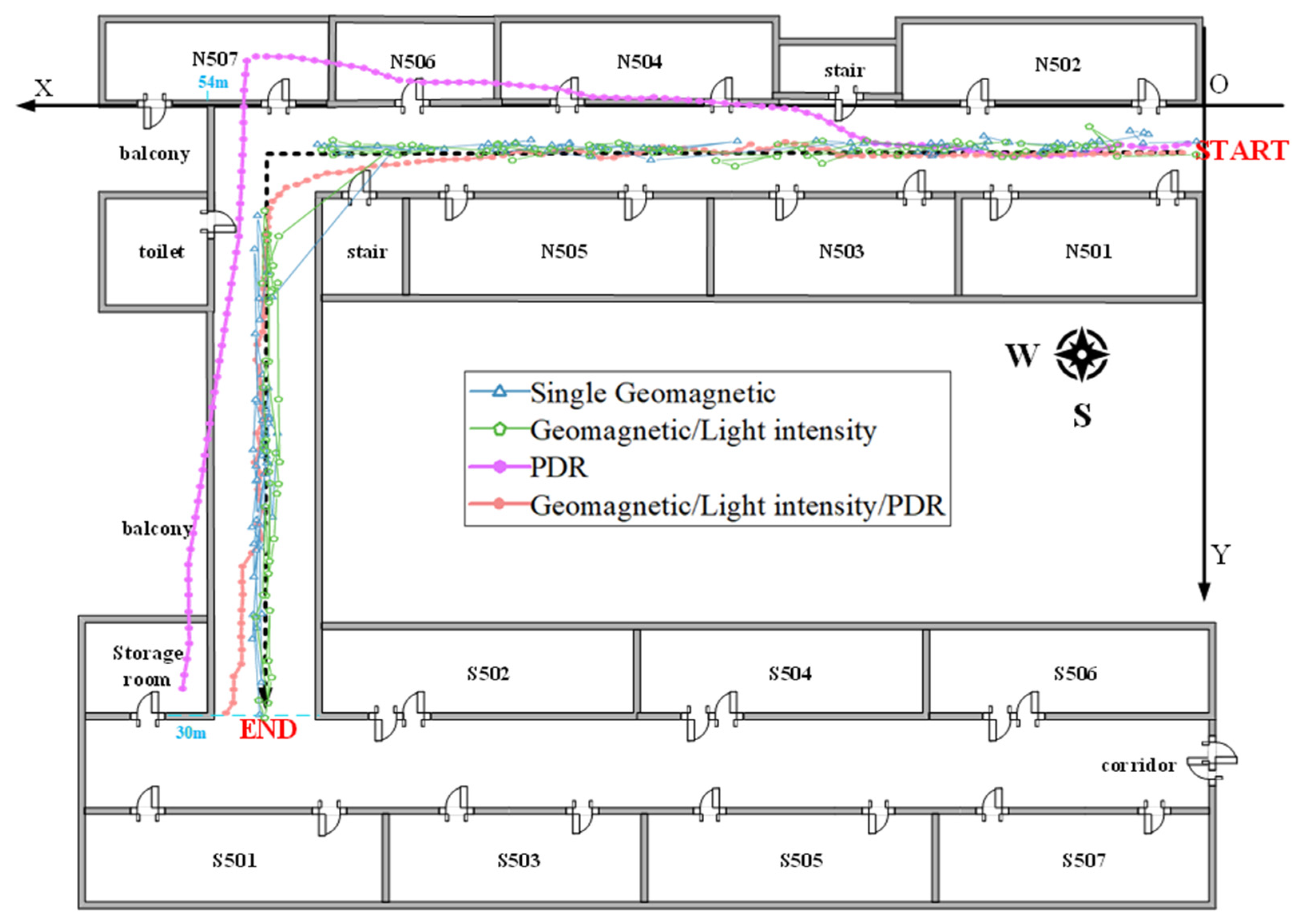
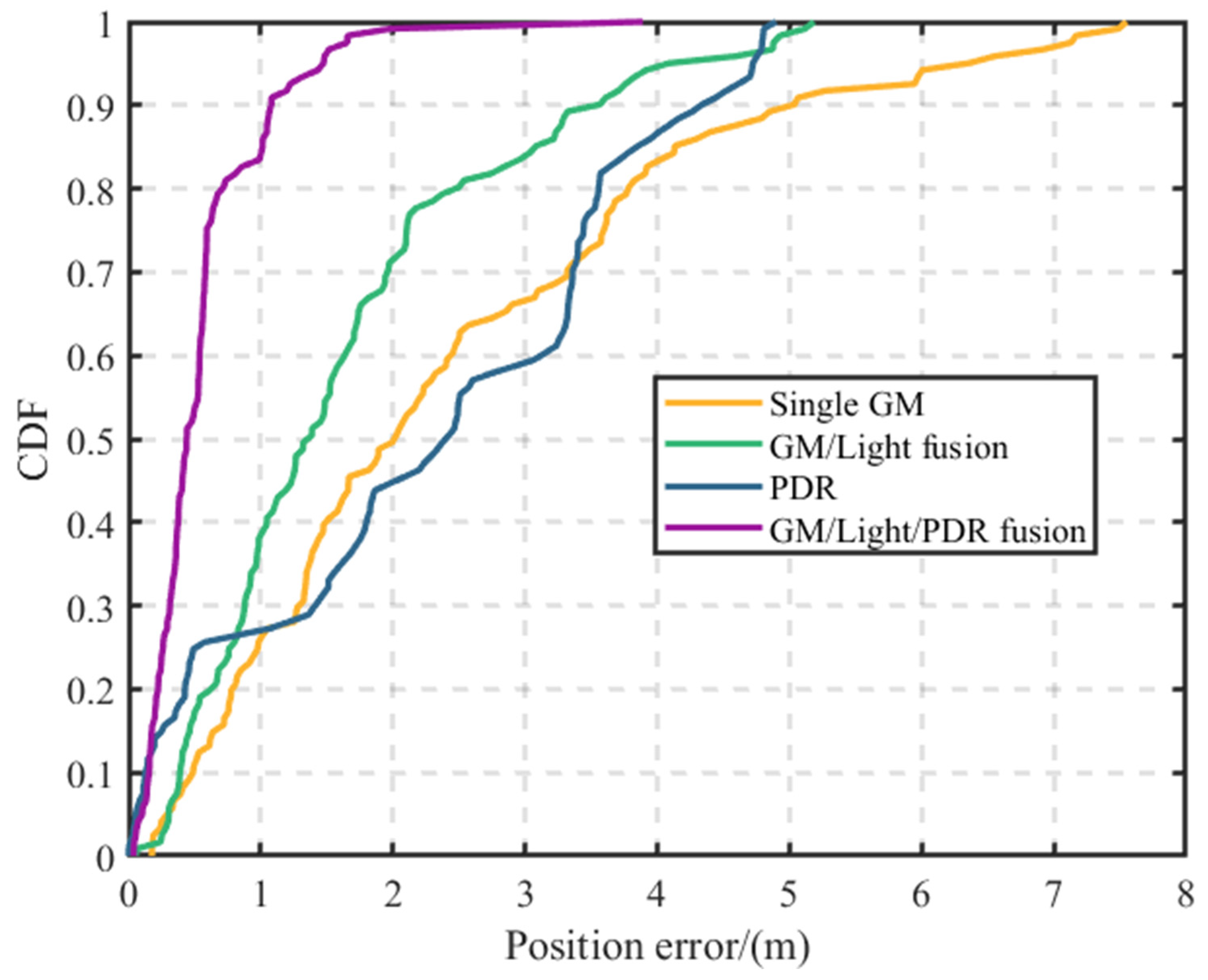
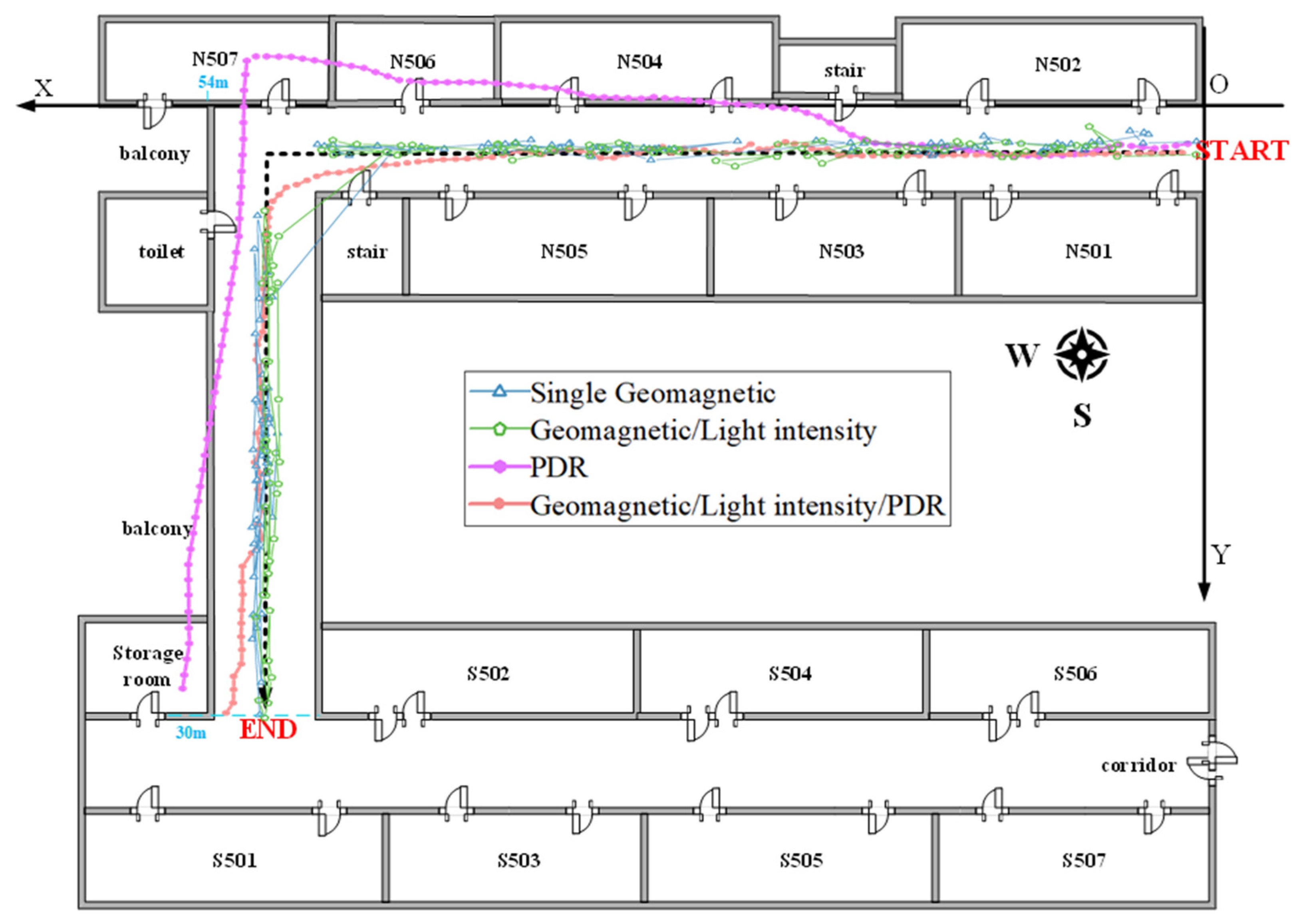
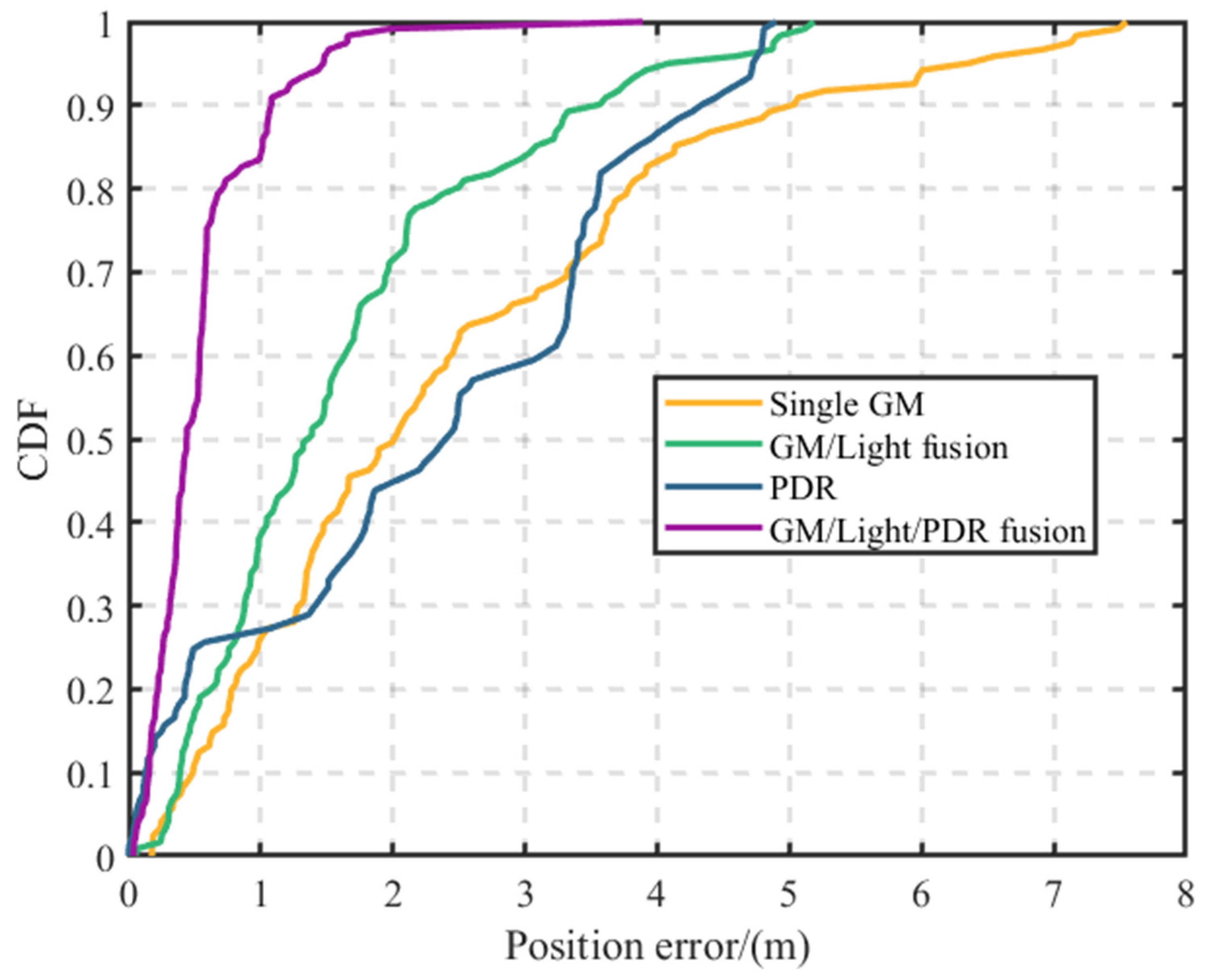
4.5. Trajectory Position Experiments
5. Discussion and Conclusions
- (1)
- The fusion positioning model presented in this paper is highly convenient. It relies solely on a smartphone to achieve precise and reliable positioning. Significantly, this model mitigates issues like “positioning jump-back” and “trajectory through the wall.” These issues often occur in trajectory-based positioning. As a result, it provides valuable insights and practical guidance for positioning applications in stable lighting environments such as mines, underground parking lots, and tunnels. Even in scenarios without a stable light source, our well-established geomagnetic fingerprint library comes into play. It enables tightly coupled geomagnetic and PDR positioning, enhancing the method’s versatility and robustness. It is important to acknowledge that our study has certain limitations. Specifically, the experimental sites chosen for this research are selected to address more common challenges in indoor positioning. The computational complexity and applicability of the proposed positioning method for larger spaces like shopping malls or areas with special building materials still require further discussion.
- (2)
- The dual-layer Tent-ASO-BP model constructed in this study offers several advantages. First, by integrating chaos mapping and intelligent optimization algorithms into the conventional BP neural network’s optimization process, the model significantly accelerates the convergence speed of the BP neural network. This results in improved learning rates and training efficiency. Consequently, the model’s generalization capabilities are substantially enhanced, making it highly effective in dealing with new data instances. Second, the hierarchical structure allows for more efficient processing of different types of information, thereby enhancing the accuracy of real-time positioning and increasing the fault tolerance of the positioning system. Furthermore, this layered architecture easily accommodates new data sources or algorithms. Given that different environments may influence the accuracy of individual information sources, the hierarchical optimization strategy, through the fusion of multiple information sources, serves to overcome such limitations, thereby enhancing the model’s universal applicability. Importantly, this optimization methodology exhibits promise for application across various disciplines and domains.
- (3)
- In our experimental setup, we ensure that the smartphone is positioned as flat as possible. However, it is crucial to acknowledge that this approach has inherent limitations. For instance, when pedestrians engage in activities like calling or swinging their phones while walking, the acquired data can be skewed. This is due to constantly changing posture angles, which can significantly influence both acceleration and gyroscope data. As a result, substantial deviations in the heading angle and step count may occur. To address this challenge, our future research endeavors will prioritize the development of sophisticated walking state recognition techniques. Additionally, the novelty of our approach lies in leveraging indoor ambient illumination characteristics for positioning. Unlike conventional methods that rely on visible light signals emitted by LEDs, our approach is independent of lighting equipment and distribution factors. This uniqueness makes our approach relatively innovative and environmentally friendly. We will further explore and investigate its potential.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim Geok, T.; Zar Aung, K.; Sandar Aung, M.; Thu Soe, M.; Abdaziz, A.; Pao Liew, C.; Hossain, F.; Tso, C.P.; Yong, W.H. Review of indoor positioning: Radio wave technology. Appl. Sci. 2020, 11, 279. [Google Scholar] [CrossRef]
- Zhu, X.; Qu, W.; Qiu, T.; Zhao, L.; Atiquzzaman, M.; Wu, D.O. Indoor intelligent fingerprint-based localization: Principles, approaches and challenges. IEEE Commun. Surv. Tutor. 2020, 22, 2634–2657. [Google Scholar] [CrossRef]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative indoor positioning systems: A systematic review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef] [PubMed]
- Thio, V.; Aparicio, J.; Ånonsen, K.B.; Bekkeng, J.K.; Booij, W. Fusing of a continuous output PDR algorithm with an ultrasonic positioning system. IEEE Sens. J. 2021, 22, 2464–2474. [Google Scholar]
- Song, S.; Feng, F.; Xu, J. Review of Geomagnetic Indoor Positioning. In Proceedings of the 2020 IEEE 4th International Conference on Frontiers of Sensors Technologies (ICFST), Shanghai, China, 6–9 November 2020; pp. 30–33. [Google Scholar]
- Zhuang, H.; He, T.; Niu, Q.; Liu, N. Efficient Indoor Localization with Multiple Consecutive Geomagnetic Sequences. In Proceedings of the 2022 International Conference on Computer Communications and Networks (ICCCN), Virtual, 25–27 July 2022; pp. 1–9. [Google Scholar]
- Jiawei, C.; Wenchao, Z.; Dongyan, W.; Xiaofeng, S. Research on Indoor Constraint Location Method of Mobile Phone Aided by Magnetic Features. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–7 September 2022; pp. 1–7. [Google Scholar]
- Zhao, M.; Qin, D.; Guo, R.; Wang, X. Indoor Map Construction Method Based on Geomagnetic Signals and Smartphones. In Proceedings of the International Conference on Artificial Intelligence for Communications and Networks, Virtual Event, 19–20 December 2020; pp. 41–50. [Google Scholar]
- Chen, C.; Chen, P.; Chen, P.; Liu, T. Indoor Positioning Using Magnetic Fingerprint Map Captured by Magnetic Sensor Array. Sensors 2021, 21, 5707. [Google Scholar] [CrossRef] [PubMed]
- Sarcevic, P.; Csik, D.; Odry, A. Indoor 2D Positioning Method for Mobile Robots Based on the Fusion of RSSI and Magnetometer Fingerprints. Sensors 2023, 23, 1855. [Google Scholar]
- Shu, M.; Chen, G.; Zhang, Z.; Xu, L. Indoor Geomagnetic Positioning Using Direction-Aware Multiscale Recurrent Neural Networks. IEEE Sens. J. 2022, 23, 3321–3333. [Google Scholar] [CrossRef]
- Ashraf, I.; Kang, M.; Hur, S.; Park, Y. MINLOC: Magnetic field patterns-based indoor localization using convolutional neural networks. IEEE Access 2020, 8, 66213–66227. [Google Scholar] [CrossRef]
- Huang, L.; Yu, B.; Du, S.; Li, J.; Jia, H.; Bi, J. Multi-Level Fusion Indoor Positioning Technology Considering Credible Evaluation Analysis. Remote Sens. 2023, 15, 353. [Google Scholar] [CrossRef]
- Xu, F.; Duan, L.; Guo, X.; Li, L.; Hu, F. Multiple classifiers global dynamic fusion location system based on WiFi and geomagnetism. In Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 19–21 November 2018; pp. 1–5. [Google Scholar]
- Sun, M.; Wang, Y.; Joseph, W.; Plets, D. Indoor localization using mind evolutionary algorithm-based geomagnetic positioning and smartphone IMU sensors. IEEE Sens. J. 2022, 22, 7130–7141. [Google Scholar]
- Hu, G.; Zhang, W.; Wan, H.; Li, X. Improving the heading accuracy in indoor pedestrian navigation based on a decision tree and Kalman filter. Sensors 2020, 20, 1578. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Cheng, Z.; Jia, X.; Zhang, L.; Li, L.; Zhao, D. A Novel Deep Learning Approach to 5G CSI/Geomagnetism/VIO Fused Indoor Localization. Sensors 2023, 23, 1311. [Google Scholar] [CrossRef] [PubMed]
- Momose, R.; Nitta, T.; Yanagisawa, M.; Togawa, N. An accurate indoor positioning algorithm using particle filter based on the proximity of bluetooth beacons. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nara, Japan, 9–12 October 2018; pp. 1–5. [Google Scholar]
- Gang, H.; Pyun, J. A smartphone indoor positioning system using hybrid localization technology. Energies 2019, 12, 3702. [Google Scholar] [CrossRef]
- Daou, A.; Pothin, J.; Honeine, P.; Bensrhair, A. Indoor Scene Recognition Mechanism Based on Direction-Driven Convolutional Neural Networks. Sensors 2023, 23, 5672. [Google Scholar] [CrossRef]
- Afzalan, M.; Jazizadeh, F. Indoor positioning based on visible light communication: A performance-based survey of real-world prototypes. ACM Comput. Surv. 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Liu, R.; Liang, Z.; Yang, K.; Li, W. Machine learning based visible light indoor positioning with single-LED and single rotatable photo detector. IEEE Photonics J. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Li, L.; Wang, J.; Yang, S.; Gong, H. Binocular stereo vision based illuminance measurement used for intelligent lighting with LED. Optik 2021, 237, 166651. [Google Scholar] [CrossRef]
- Hou, X.; Bergmann, J. Pedestrian dead reckoning with wearable sensors: A systematic review. IEEE Sens. J. 2020, 21, 143–152. [Google Scholar] [CrossRef]
- Khalili, B.; Ali Abbaspour, R.; Chehreghan, A.; Vesali, N. A context-aware smartphone-based 3D indoor positioning using pedestrian dead reckoning. Sensors 2022, 22, 9968. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, Y.; Gui, X.; Han, L. An improved PDR/UWB integrated system for indoor navigation applications. IEEE Sens. J. 2020, 20, 8046–8061. [Google Scholar] [CrossRef]
- Wang, Q.; Ye, L.; Luo, H.; Men, A.; Zhao, F.; Huang, Y. Pedestrian stride-length estimation based on LSTM and denoising autoencoders. Sensors 2019, 19, 840. [Google Scholar] [CrossRef]
- Hayashitani, M.; Kasahara, T.; Ishii, D.; Arakawa, Y.; Okamoto, S.; Yamanaka, N.; Takezawa, N.; Nashimoto, K. 10ns High-speed PLZT optical content distribution system having slot-switch and GMPLS controller. IEICE Electron. Expr. 2008, 5, 181–186. [Google Scholar] [CrossRef]
- Kim, J.W.; Jang, H.J.; Hwang, D.; Park, C. A step, stride and heading determination for the pedestrian navigation system. J. Glob. Positi. Syst. 2004, 3, 273–279. [Google Scholar] [CrossRef]
- Liang, Q.; Liu, M. An automatic site survey approach for indoor localization using a smartphone. IEEE Trans. Autom. Sci. Eng. 2019, 17, 191–206. [Google Scholar] [CrossRef]
- Yan, S.; Wu, C.; Luo, X.; Ji, Y.; Xiao, J. Multi-Information Fusion Indoor Localization Using Smartphones. Appl. Sci. 2023, 13, 3270. [Google Scholar] [CrossRef]
- Tao, X.; Zhu, F.; Hu, X.; Liu, W.; Zhang, X. An enhanced foot-mounted PDR method with adaptive ZUPT and multi-sensors fusion for seamless pedestrian navigation. GPS Solut. 2022, 26, 13. [Google Scholar] [CrossRef]
- Wang, X.; Lin, F. Intersymbol interference cancellation based on wavelet transformation for indoor ultrawideband positioning systems. IEEE Syst. J. 2020, 16, 100–111. [Google Scholar] [CrossRef]
- Khodarahmi, M.; Maihami, V. A review on Kalman filter models. Arch. Comput. Method. E 2023, 30, 727–747. [Google Scholar] [CrossRef]
- Liu, X.; Chen, L.; Jiao, Z.; Lu, X. Robust Pedestrian Dead Reckoning Integrating Magnetic Field Signals and Digital Terrestrial Multimedia Broadcasting Signals. Remote Sens. 2023, 15, 3229. [Google Scholar] [CrossRef]
- Huang, S.; Zhao, K.; Zheng, Z.; Ji, W.; Li, T.; Liao, X. An optimized fingerprinting-based indoor positioning with Kalman filter and universal kriging for 5G internet of things. Wirel. Commun. Mob. Comput. 2021, 2021, 9936706. [Google Scholar] [CrossRef]
- Lv, Y.; Liu, W.; Wang, Z.; Zhang, Z. WSN localization technology based on hybrid GA-PSO-BP algorithm for indoor three-dimensional space. Wirel. Pers. Commun. 2020, 114, 167–184. [Google Scholar] [CrossRef]
- Wang, E.; Liu, X.; Wan, J. An improved filtering algorithm for indoor localization based on DE-PSO-BPNN. J. Intell. Fuzzy Syst. 2023, 44, 9513–9525. [Google Scholar] [CrossRef]
- Hekimoğlu, B. Optimal tuning of fractional order PID controller for DC motor speed control via chaotic atom search optimization algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar] [CrossRef]
- Li, Y.; Han, M.; Guo, Q. Modified whale optimization algorithm based on tent chaotic mapping and its application in structural optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | WT Processing | No Processing | ||||||
|---|---|---|---|---|---|---|---|---|
| BKF | KF | Mag | Gyro | BKF | KF | Mag | Gyro | |
| mean | 5.45 | 5.76 | 6.30 | 7.71 | 5.63 | 5.97 | 6.21 | 9.21 |
| variance | 15.42 | 18.83 | 25.27 | 22.11 | 18.23 | 22.01 | 23.91 | 28.25 |
| CDF = 30% | 3.01 | 3.13 | 2.78 | 4.46 | 2.93 | 3.03 | 2.80 | 5.56 |
| CDF = 60% | 5.24 | 5.65 | 6.52 | 8.95 | 5.94 | 6.05 | 6.49 | 10.48 |
| CDF = 90% | 11.37 | 12.79 | 14.61 | 14.13 | 12.09 | 13.54 | 13.17 | 16.13 |
| Algorithm | Min Error/m | Max Error/m | Mean Error/m | SD/m |
|---|---|---|---|---|
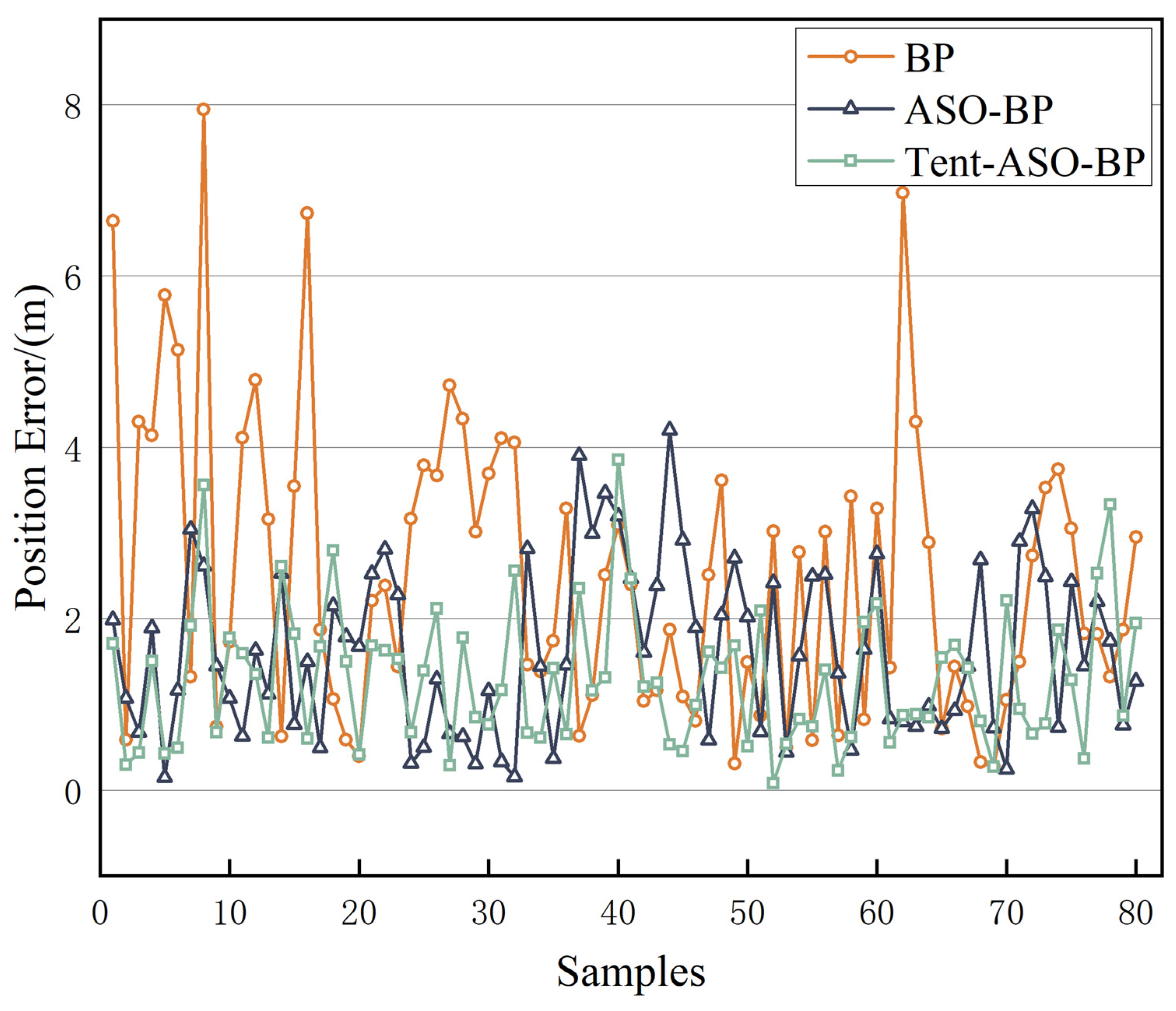
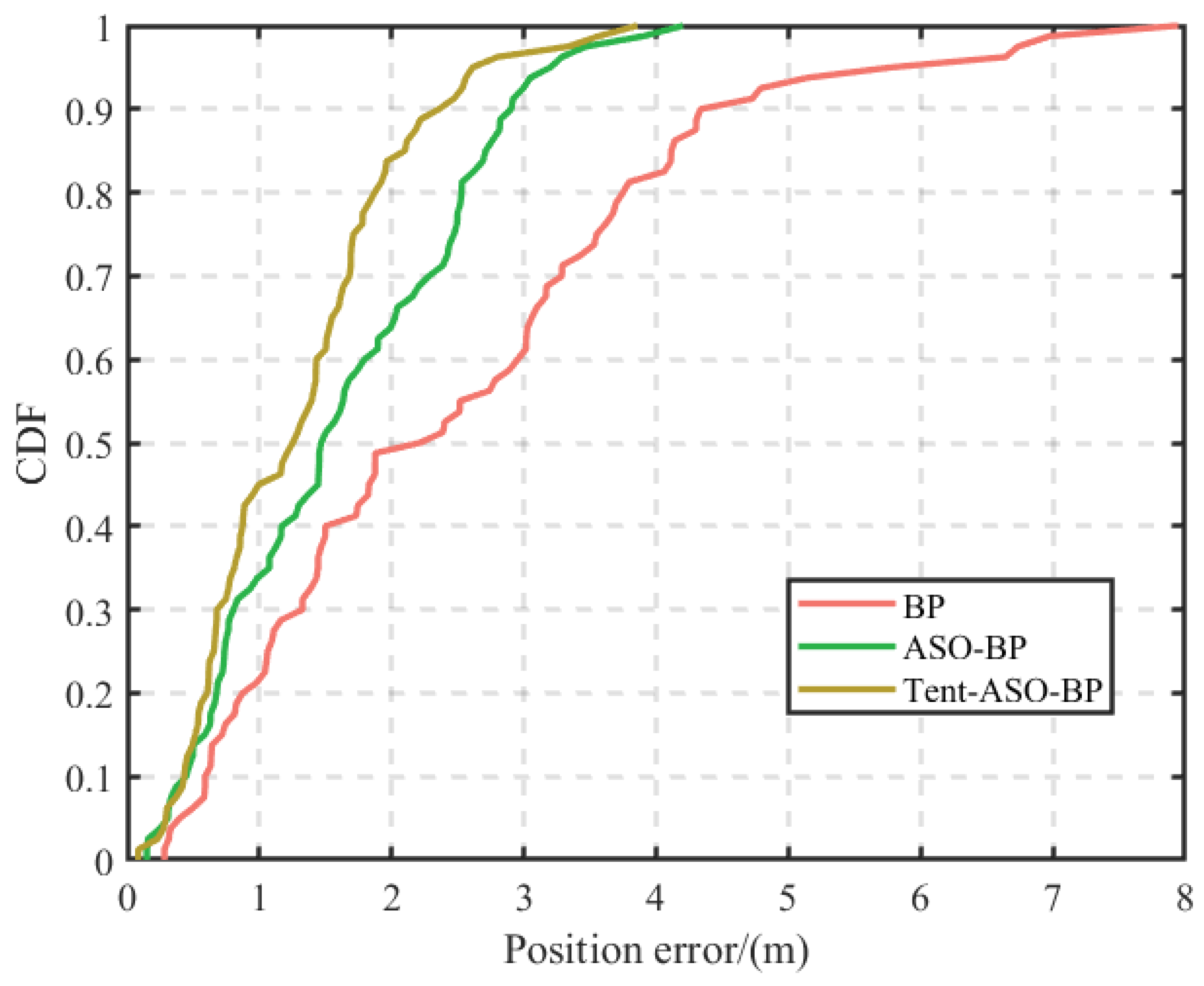
| Tent-ASO-BP | 0.08 | 3.85 | 1.31 | 0.80 |
| ASO-BP | 0.24 | 4.21 | 1.63 | 0.98 |
| BP | 0.31 | 7.97 | 2.51 | 1.72 |
| Methods | Min/m | Max/m | Mean/m | SD/m |
|---|---|---|---|---|
| Single GM | 0.14 | 3.95 | 1.52 | 1.13 |
| GM/Light fusion | 0.06 | 3.28 | 1.02 | 0.68 |
| PDR | 0.00 | 2.68 | 1.63 | 0.74 |
| GM/Light/PDR fusion | 0.05 | 1.31 | 0.56 | 0.41 |
| Methods | Min/m | Max/m | Mean/m | SD/m |
|---|---|---|---|---|
| Single GM | 0.18 | 7.56 | 2.45 | 1.82 |
| GM/Light fusion | 0.05 | 5.18 | 1.67 | 1.22 |
| PDR | 0.00 | 5.02 | 2.31 | 1.53 |
| GM/Light/PDR fusion | 0.04 | 1.88 | 0.75 | 0.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Yu, X.; Zhu, P.; Xiao, X.; Wei, M.; Xie, S. A Fusion Positioning Method for Indoor Geomagnetic/Light Intensity/Pedestrian Dead Reckoning Based on Dual-Layer Tent–Atom Search Optimization–Back Propagation. Sensors 2023, 23, 7929. https://doi.org/10.3390/s23187929
Han Y, Yu X, Zhu P, Xiao X, Wei M, Xie S. A Fusion Positioning Method for Indoor Geomagnetic/Light Intensity/Pedestrian Dead Reckoning Based on Dual-Layer Tent–Atom Search Optimization–Back Propagation. Sensors. 2023; 23(18):7929. https://doi.org/10.3390/s23187929
Chicago/Turabian StyleHan, Yuchen, Xuexiang Yu, Ping Zhu, Xingxing Xiao, Min Wei, and Shicheng Xie. 2023. "A Fusion Positioning Method for Indoor Geomagnetic/Light Intensity/Pedestrian Dead Reckoning Based on Dual-Layer Tent–Atom Search Optimization–Back Propagation" Sensors 23, no. 18: 7929. https://doi.org/10.3390/s23187929
APA StyleHan, Y., Yu, X., Zhu, P., Xiao, X., Wei, M., & Xie, S. (2023). A Fusion Positioning Method for Indoor Geomagnetic/Light Intensity/Pedestrian Dead Reckoning Based on Dual-Layer Tent–Atom Search Optimization–Back Propagation. Sensors, 23(18), 7929. https://doi.org/10.3390/s23187929