

Generic and Model-Based Calibration Method for Spatial Frequency Domain Imaging with Parameterized Frequency and Intensity Correction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
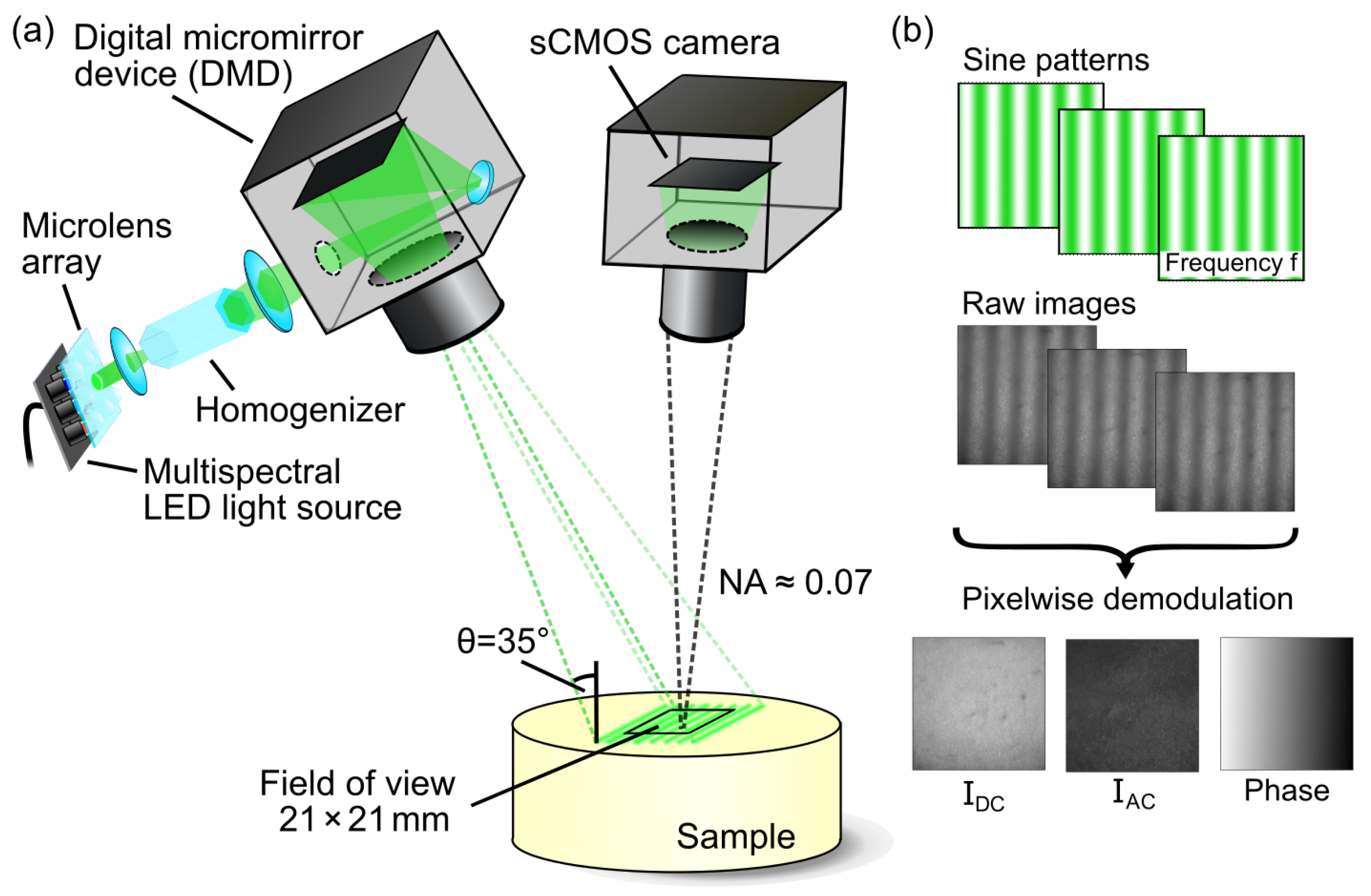
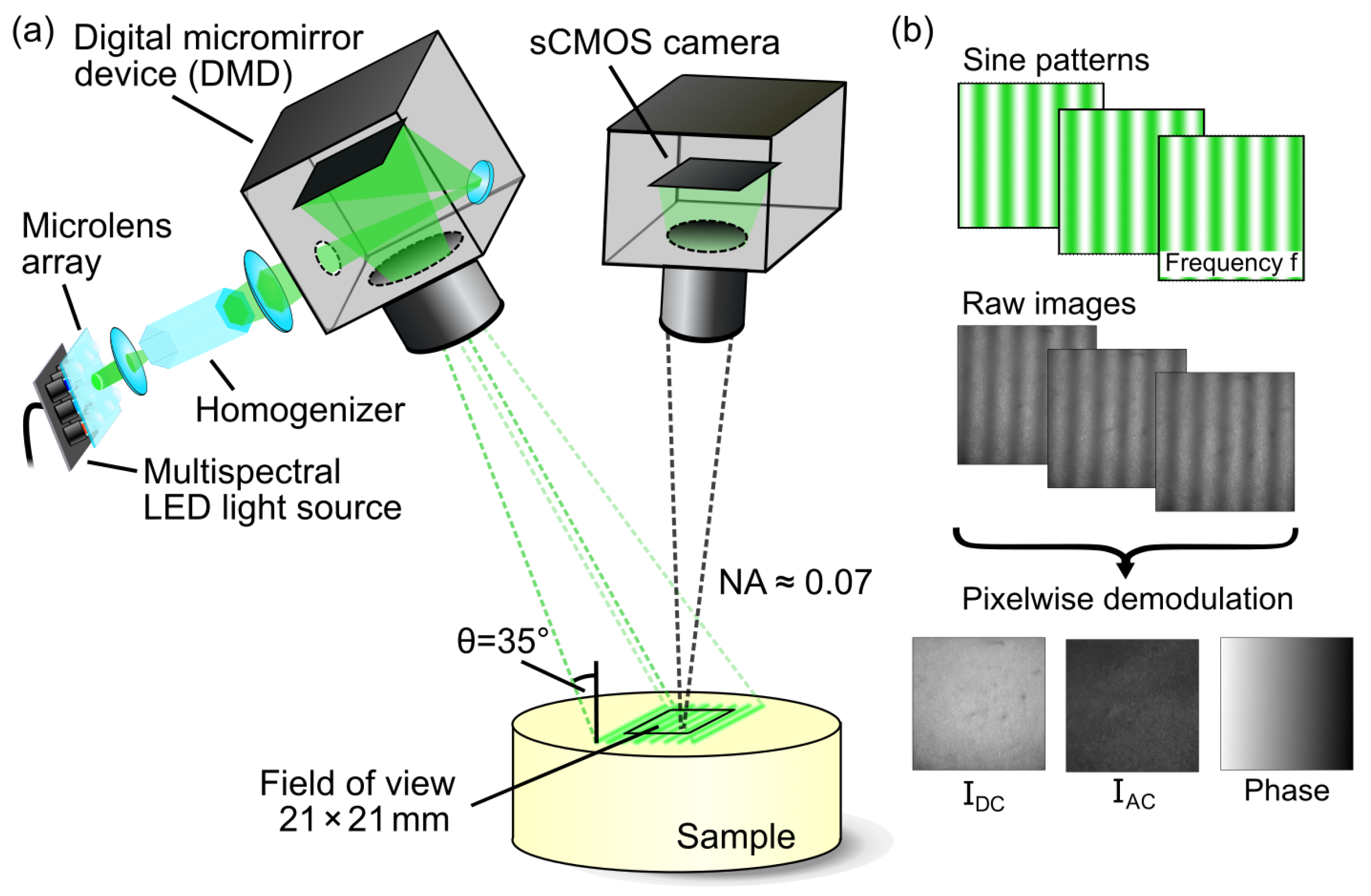
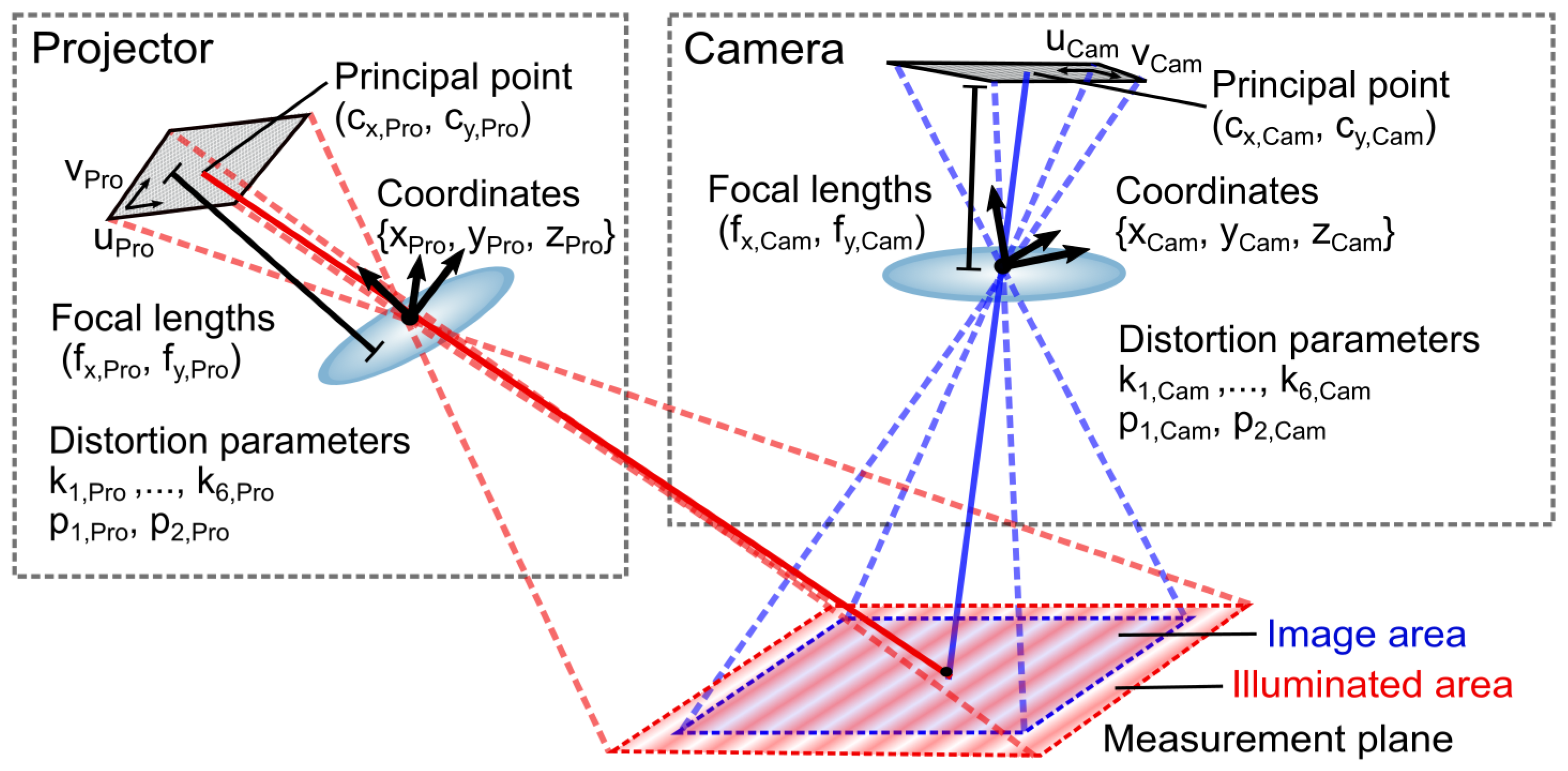
2.1. Multispectral SFDI Setup
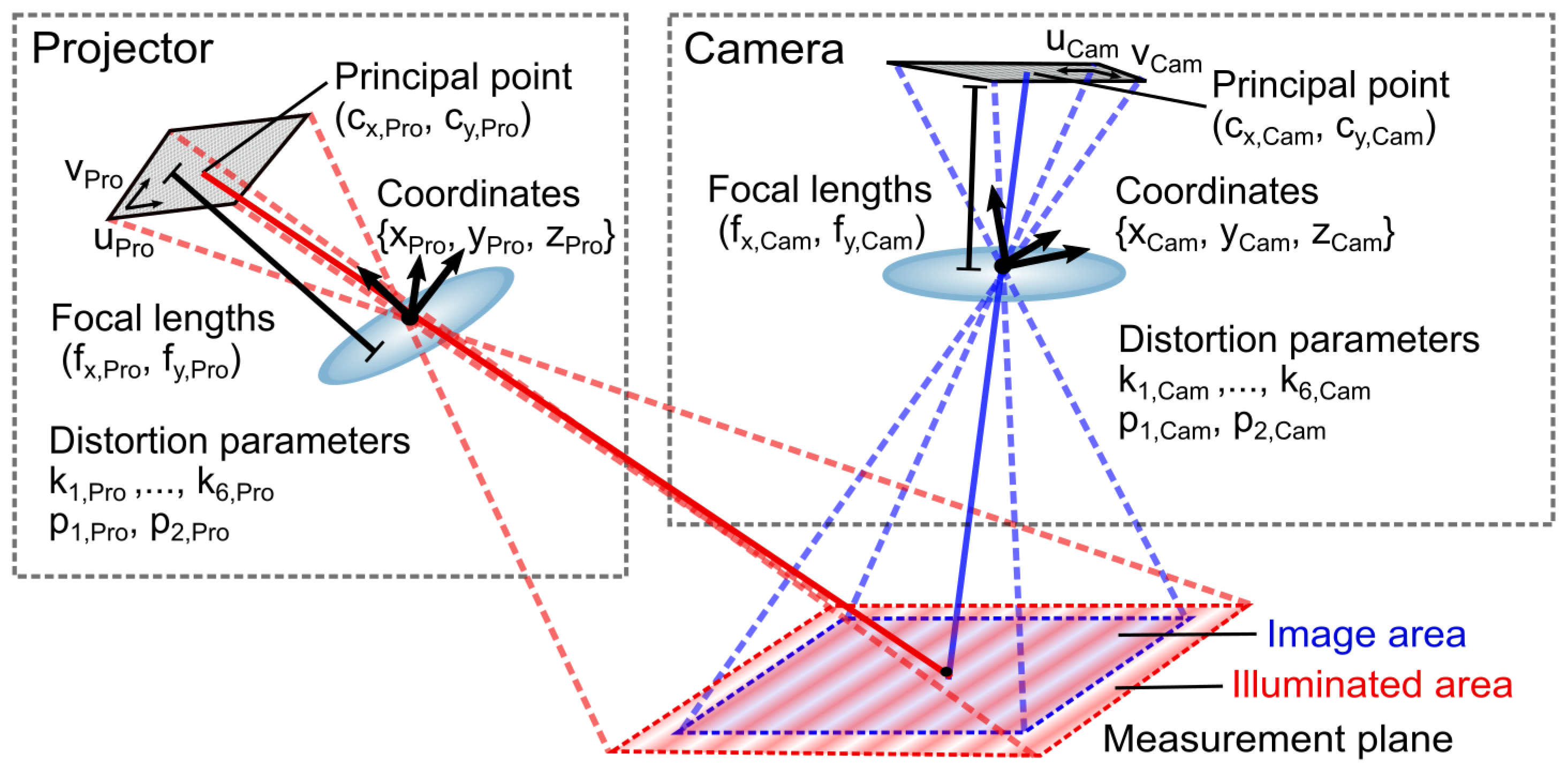
2.2. Calibration Model
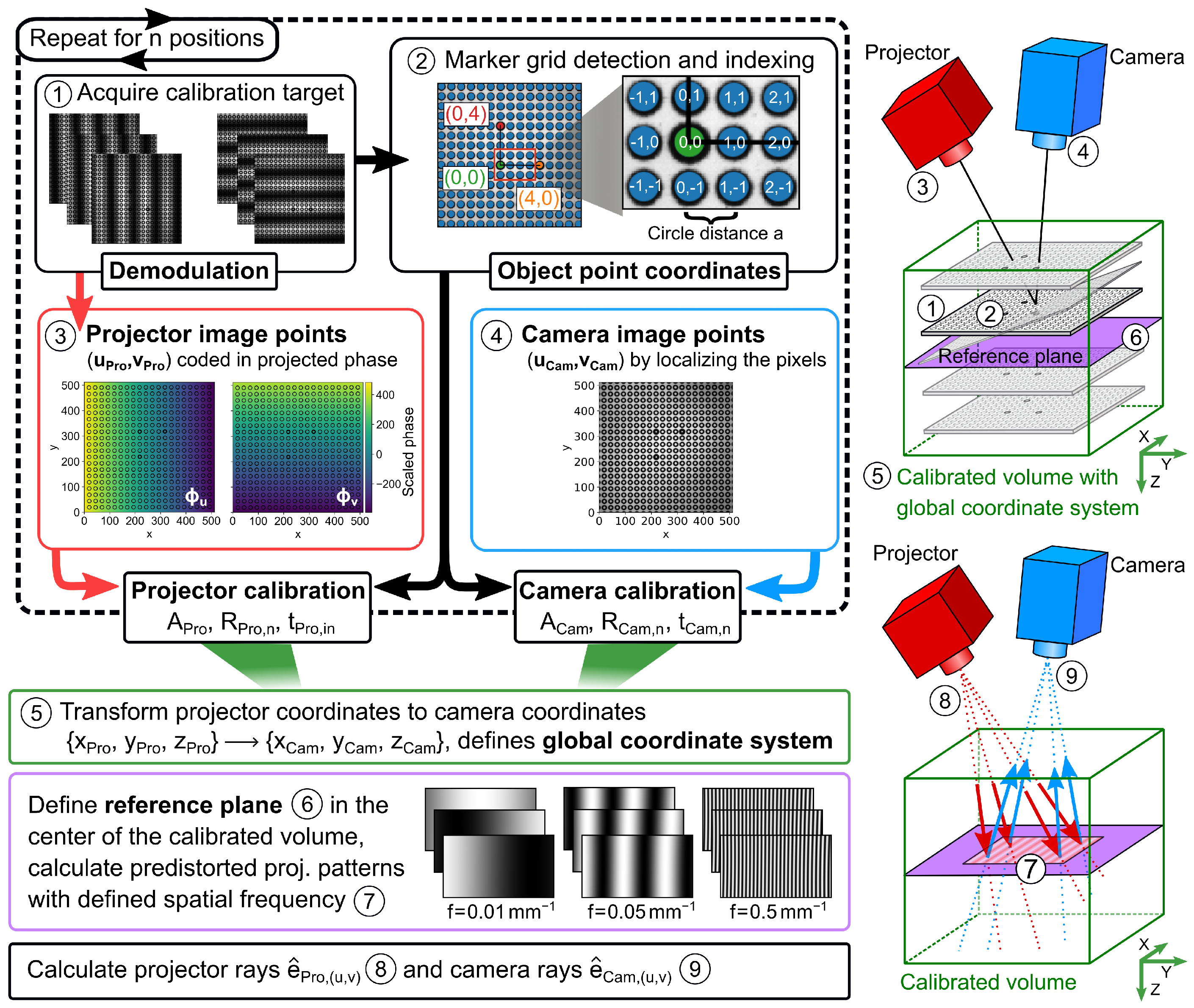
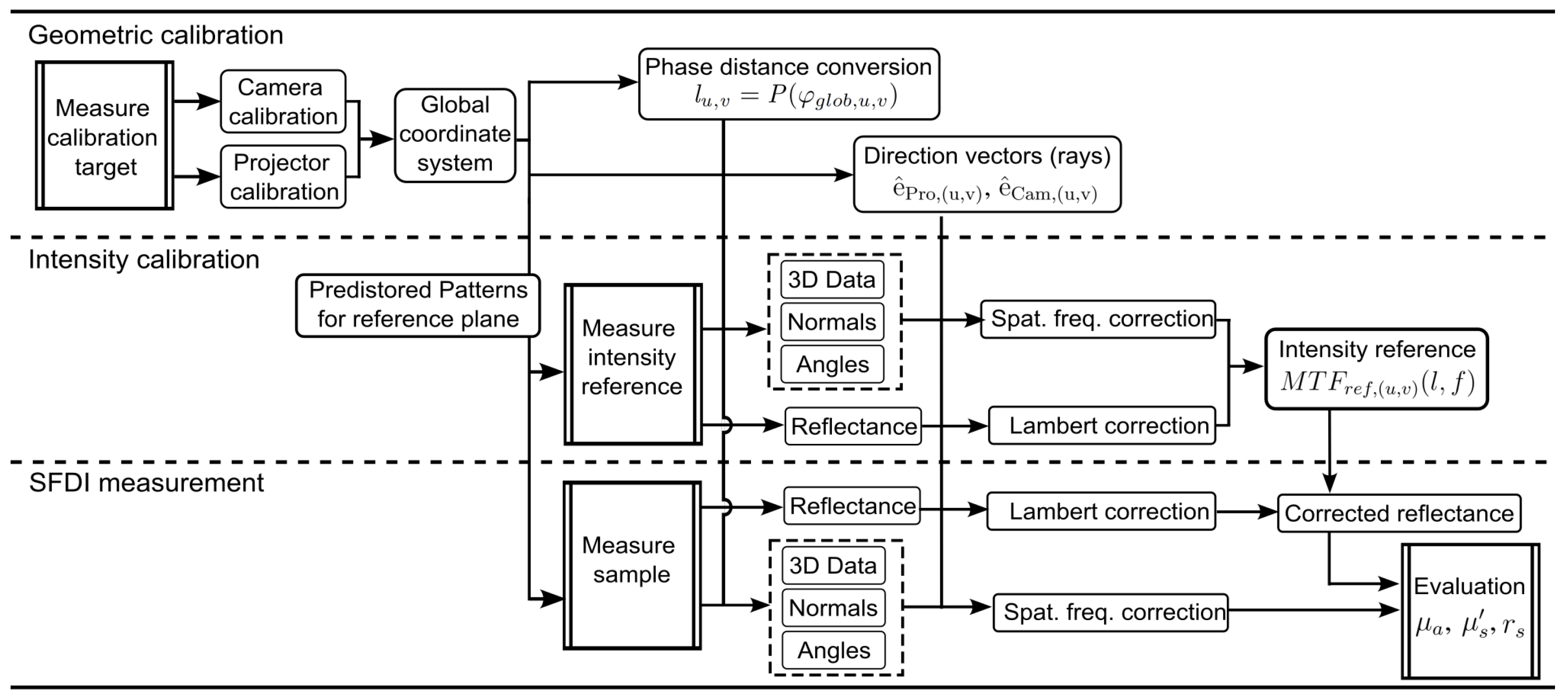
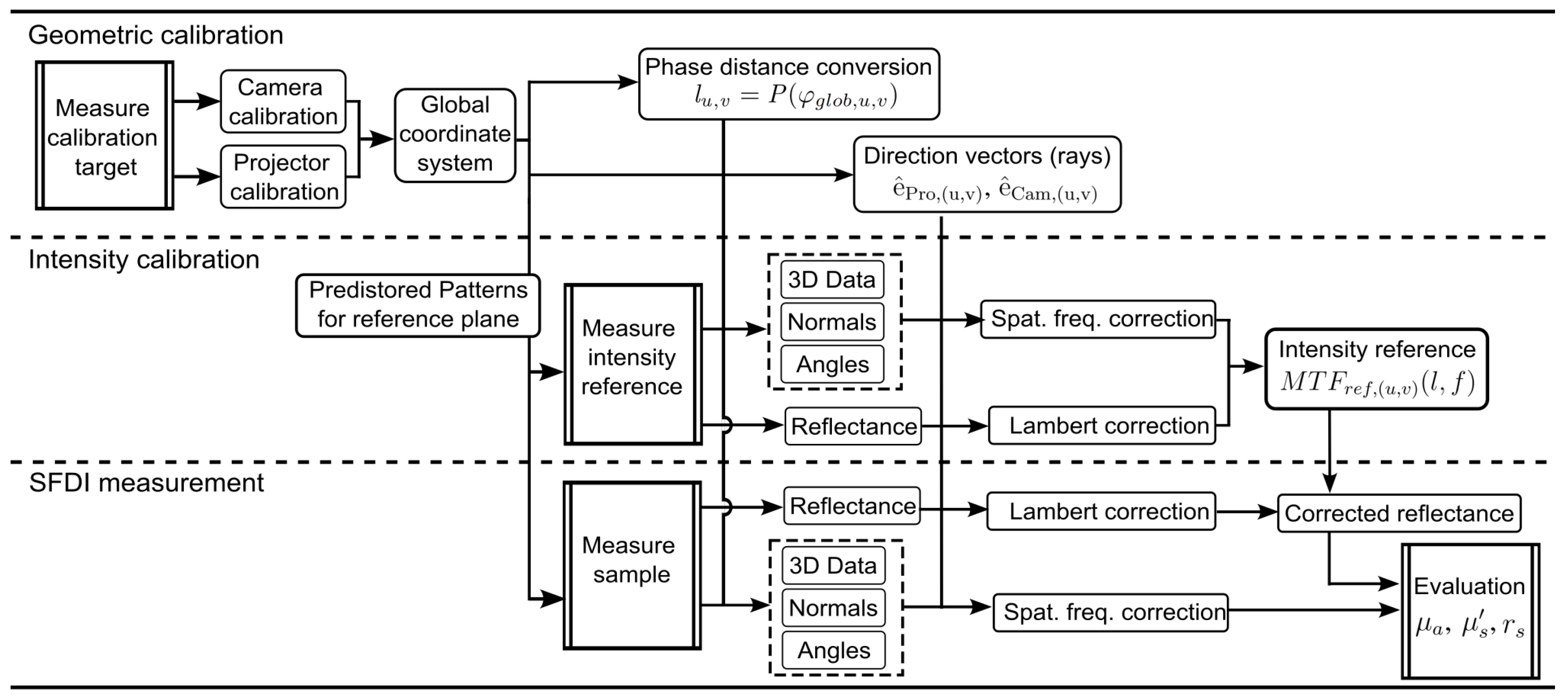
2.3. Calibration Routine
2.3.1. Geometric Calibration
2.3.2. Parametrized 3D Point Estimation
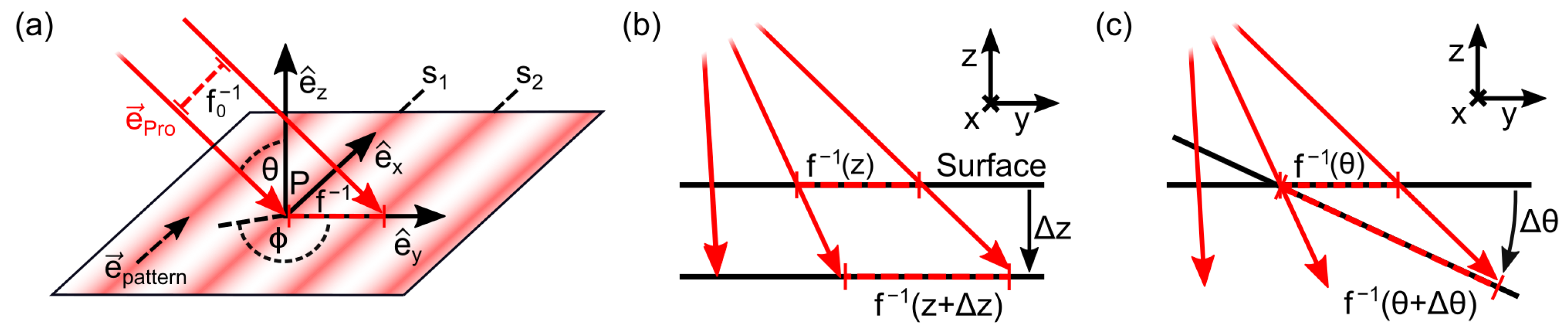
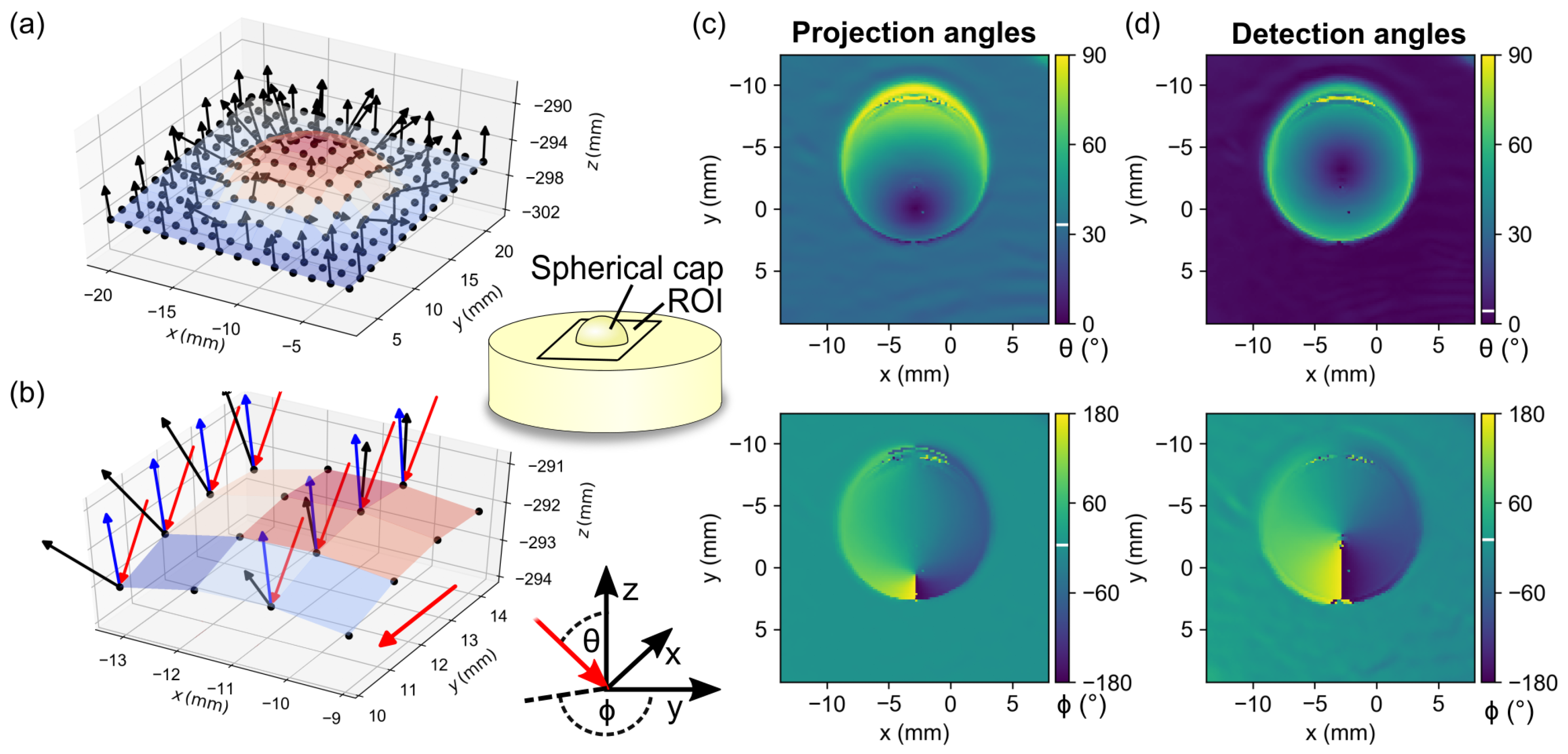
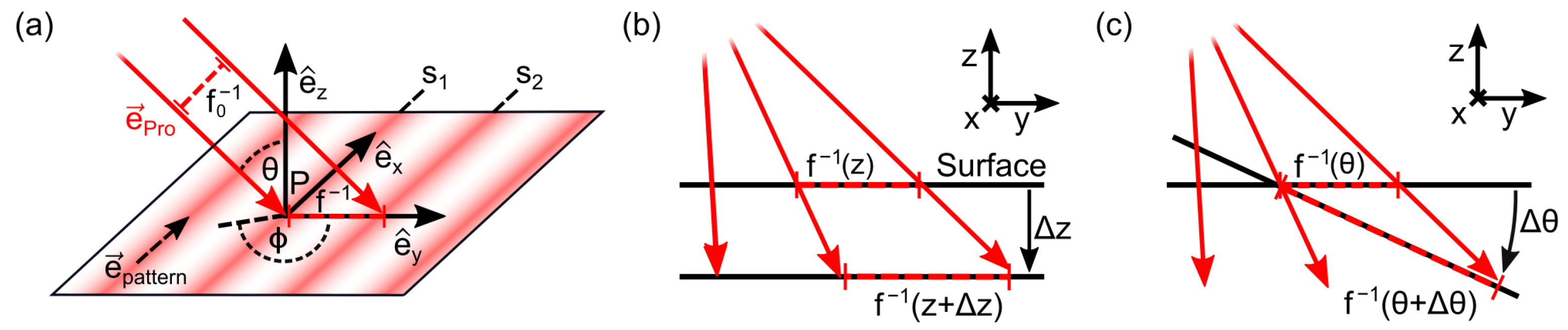
2.3.3. Calculating Normals and Angles for Spatial Frequency Correction
2.3.4. Intensity Calibration
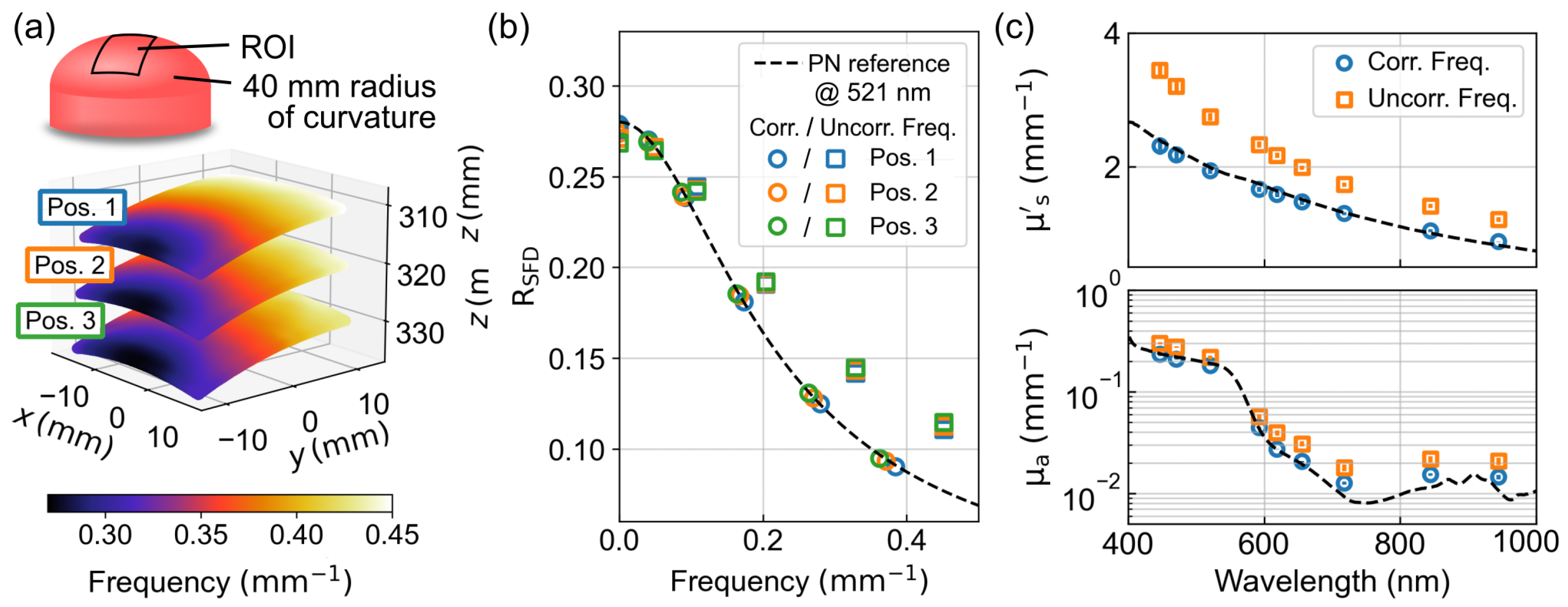
2.4. Phantom Measurements
3. Results and Discussion
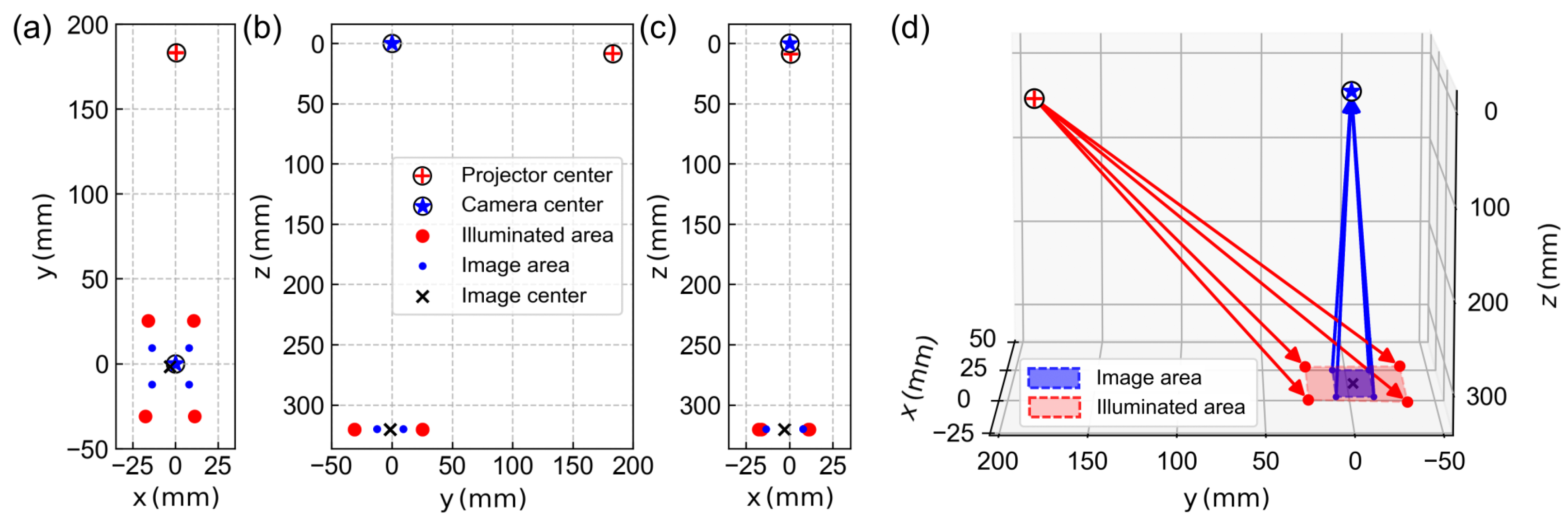
3.1. Geometric Model of the SFDI Setup in Global Coordinates
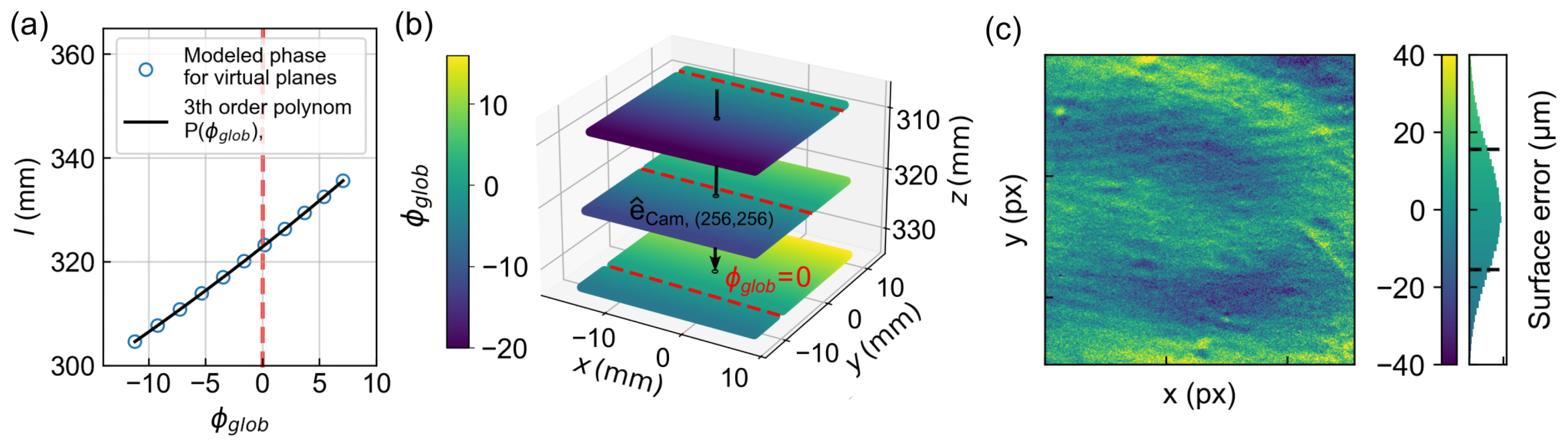
3.2. Phase-Distance Conversion
3.3. Calculating the Projection and Detection Angles
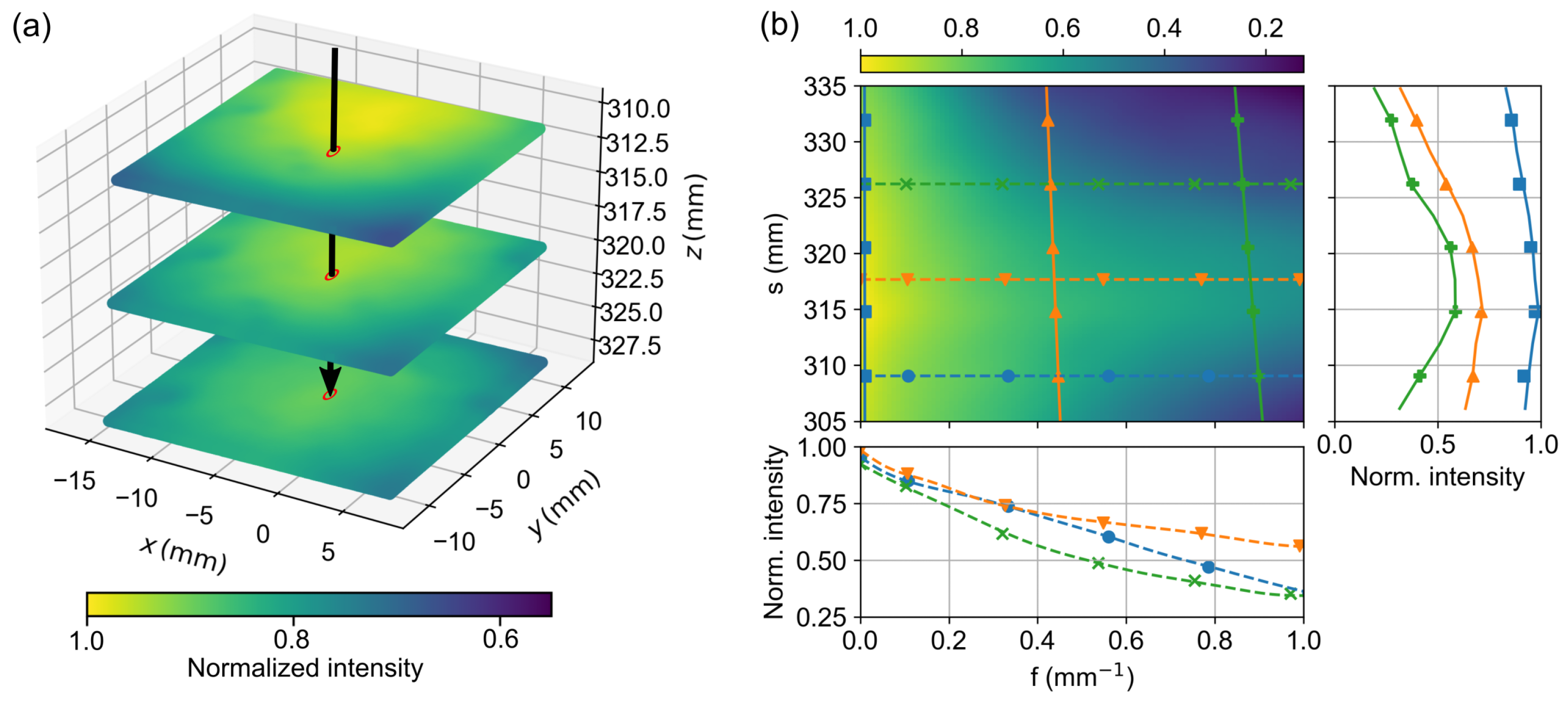
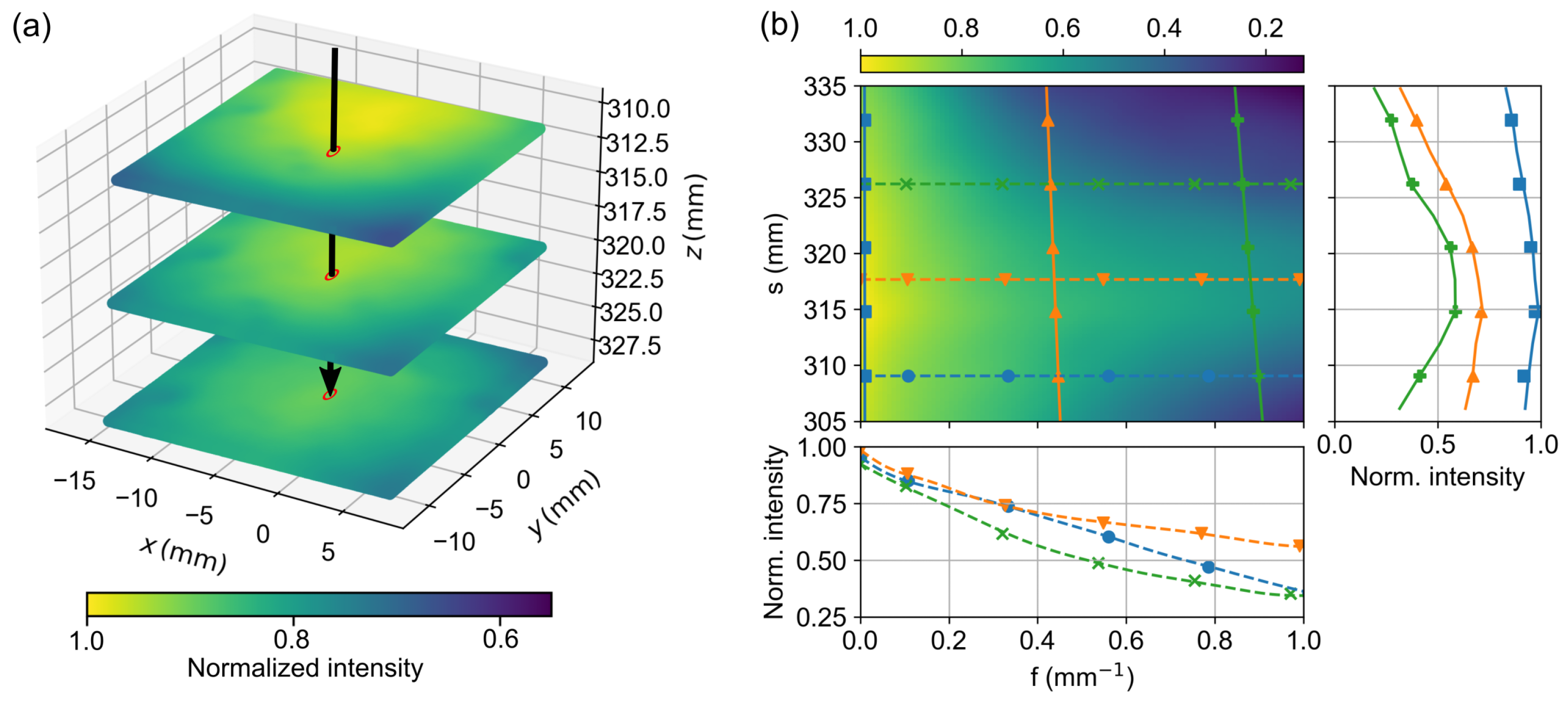
3.4. Look-Up Table for Intensity Reference
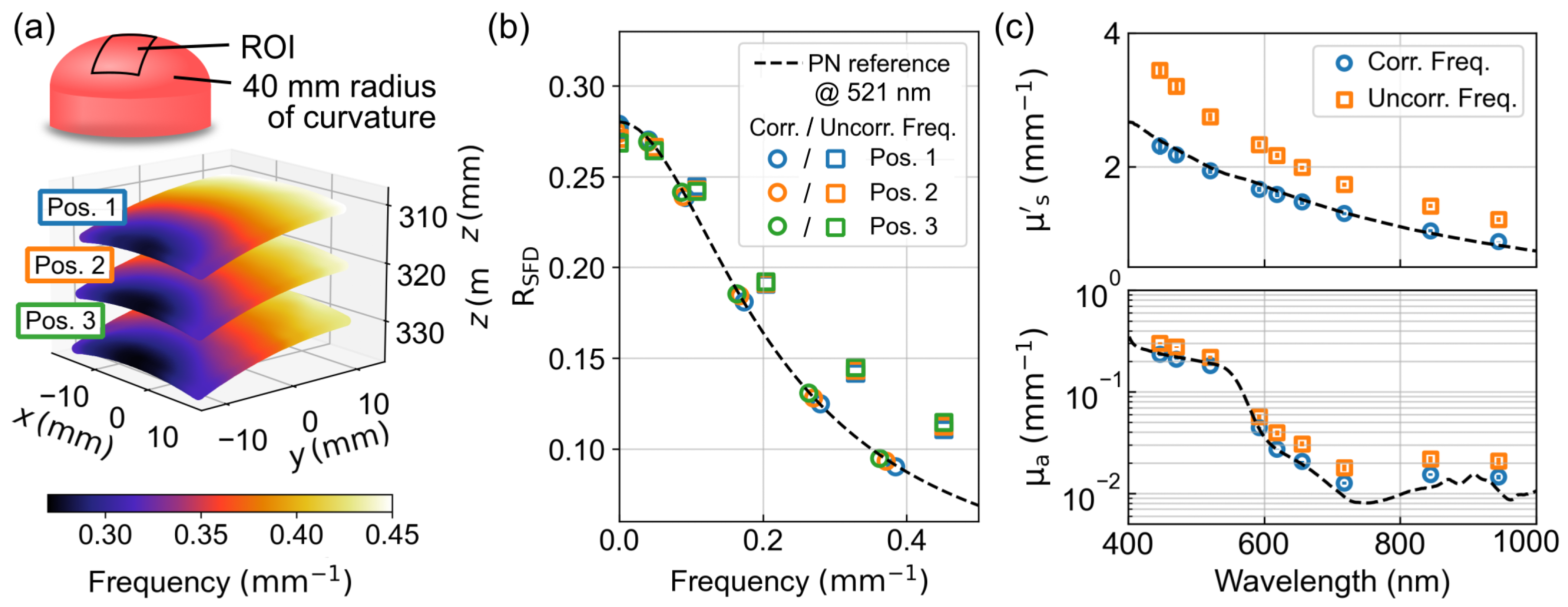
3.5. Determining Multispectral Optical Properties of a Hemispherical Phantom
4. Summary and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bodenschatz, N.; Krauter, P.; Nothelfer, S.; Foschum, F.; Bergmann, F.; Liemert, A.; Kienle, A. Detecting structural information of scatterers using spatial frequency domain imaging. J. Biomed. Opt. 2015, 20, 116006. [Google Scholar] [CrossRef] [PubMed]
- Nothelfer, S.; Bergmann, F.; Liemert, A.; Reitzle, D.; Kienle, A. Spatial frequency domain imaging using an analytical model for separation of surface and volume scattering. J. Biomed. Opt. 2018, 24, 071604. [Google Scholar] [CrossRef]
- Phan, T.; Rowland, R.; Ponticorvo, A.; Le, B.C.; Wilson, R.H.; Sharif, S.A.; Kennedy, G.T.; Bernal, N.P.; Durkin, A.J. Characterizing reduced scattering coefficient of normal human skin across different anatomic locations and Fitzpatrick skin types using spatial frequency domain imaging. J. Biomed. Opt. 2021, 26, 026001. [Google Scholar] [CrossRef]
- Nguyen, J.Q.; Crouzet, C.; Mai, T.; Riola, K.; Uchitel, D.; Liaw, L.H.; Bernal, N.; Ponticorvo, A.; Choi, B.; Durkin, A.J. Spatial frequency domain imaging of burn wounds in a preclinical model of graded burn severity. J. Biomed. Opt. 2013, 18, 066010. [Google Scholar] [CrossRef]
- Lohner, S.A.; Biegert, K.; Nothelfer, S.; Hohmann, A.; McCormick, R.; Kienle, A. Determining the optical properties of apple tissue and their dependence on physiological and morphological characteristics during maturation. Part 1: Spatial frequency domain imaging. Postharvest Biol. Technol. 2021, 181, 111647. [Google Scholar] [CrossRef]
- Lu, Y.; Li, R.; Lu, R. Fast demodulation of pattern images by spiral phase transform in structured-illumination reflectance imaging for detection of bruises in apples. Comput. Electron. Agric. 2016, 127, 652–658. [Google Scholar] [CrossRef]
- Vervandier, J.; Gioux, S. Single snapshot imaging of optical properties. Biomed. Opt. Express 2013, 4, 2938. [Google Scholar] [CrossRef]
- Ghijsen, M.; Choi, B.; Durkin, A.J.; Gioux, S.; Tromberg, B.J. Real-time simultaneous single snapshot of optical properties and blood flow using coherent spatial frequency domain imaging (cSFDI). Biomed. Opt. Express 2016, 7, 870. [Google Scholar] [CrossRef]
- Gioux, S.; Mazhar, A.; Cuccia, D.J. Spatial frequency domain imaging in 2019: Principles, applications, and perspectives. J. Biomed. Opt. 2019, 24, 071613. [Google Scholar] [CrossRef]
- Cuccia, D.J.; Bevilacqua, F.; Durkin, A.J.; Ayers, F.R.; Tromberg, B.J. Quantitation and mapping of tissue optical properties using modulated imaging. J. Biomed. Opt. 2009, 14, 024012. [Google Scholar] [CrossRef]
- Liemert, A.; Kienle, A. Spatially modulated light source obliquely incident on a semi-infinite scattering medium. Opt. Lett. 2012, 37, 4158. [Google Scholar] [CrossRef]
- Sun, Z.; Xie, L.; Hu, D.; Ying, Y. An artificial neural network model for accurate and efficient optical property mapping from spatial-frequency domain images. Comput. Electron. Agric. 2021, 188, 106340. [Google Scholar] [CrossRef]
- Naglic, P.; Zelinskyi, Y.; Likar, B.; Pernuš, F.; Bürmen, M. OpenCL Framework for Fast Estimation of Optical Properties from Spatial Frequency Domain Images; SPIE: Bellingham, WA, USA, 2019; p. 45. [Google Scholar] [CrossRef]
- Stier, A.C.; Goth, W.; Zhang, Y.; Fox, M.C.; Reichenberg, J.S.; Lopes, F.C.; Sebastian, K.R.; Markey, M.K.; Tunnell, J.W. A Machine Learning Approach to Determining Sub-Diffuse Optical Properties; Optica Publishing Group: Washington, DC, USA, 2020; p. SM2D.6. [Google Scholar] [CrossRef]
- Bodenschatz, N.; Brandes, A.; Liemert, A.; Kienle, A. Sources of errors in spatial frequency domain imaging of scattering media. J. Biomed. Opt. 2014, 19, 071405. [Google Scholar] [CrossRef] [PubMed]
- Gioux, S.; Mazhar, A.; Cuccia, D.J.; Durkin, A.J.; Tromberg, B.J.; Frangioni, J.V. Three-dimensional surface profile intensity correction for spatially modulated imaging. J. Biomed. Opt. 2009, 14, 034045. [Google Scholar] [CrossRef] [PubMed]
- van de Giessen, M.; Angelo, J.P.; Gioux, S. Real-time, profile-corrected single snapshot imaging of optical properties. Biomed. Opt. Express 2015, 6, 4051. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Tabassum, S.; Piracha, S.; Nandhu, M.S.; Viapiano, M.; Roblyer, D. Angle correction for small animal tumor imaging with spatial frequency domain imaging (SFDI). Biomed. Opt. Express 2016, 7, 2373. [Google Scholar] [CrossRef] [PubMed]
- Dan, M.; Liu, M.; Bai, W.; Gao, F. Profile-based intensity and frequency corrections for single-snapshot spatial frequency domain imaging. Opt. Express 2021, 29, 12833. [Google Scholar] [CrossRef]
- Srinivasan, V.; Liu, H.C.; Halioua, M. Automated phase-measuring profilometry: A phase mapping approach. Appl. Opt. 1985, 24, 185. [Google Scholar] [CrossRef]
- Zhou, W.S.; Su, X.Y. A direct mapping algorithm for phase-measuring profilometry. J. Mod. Opt. 1994, 41, 89–94. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Zhang, S.; Huang, P.S. Novel method for structured light system calibration. Opt. Eng. 2006, 45, 083601. [Google Scholar] [CrossRef]
- Chen, X.; Xi, J.; Jin, Y.; Sun, J. Accurate calibration for a camera-projector measurement system based on structured light projection. Opt. Lasers Eng. 2009, 47, 310–319. [Google Scholar] [CrossRef]
- Zhang, S. Flexible and high-accuracy method for uni-directional structured light system calibration. Opt. Lasers Eng. 2021, 143, 106637. [Google Scholar] [CrossRef]
- Geiger, S.; Hank, P.; Kienle, A. Improved topography reconstruction of volume scattering objects using structured light. J. Opt. Soc. Am. A 2022, 39, 1823. [Google Scholar] [CrossRef] [PubMed]
- Ramalingam, S.; Sturm, P. A Unifying Model for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1309–1319. [Google Scholar] [CrossRef]
- Grossberg, M.; Nayar, S. A general imaging model and a method for finding its parameters. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 108–115. [Google Scholar] [CrossRef]
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar] [CrossRef]
- Bradski, G. Dr. Dobb’s Journal of Software Tools; The OpenCV Library, UBM Technology Group: San Francisco, CA, USA, 2000. [Google Scholar]
- Bouguet, J.Y. Camera Calibration Toolbox for Matlab (1.0); CaltechDATA: San Francisco, CA, USA, 2022. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Marchand, E.; Uchiyama, H.; Spindler, F. Pose Estimation for Augmented Reality: A Hands-On Survey. IEEE Trans. Vis. Comput. Graph. 2016, 22, 2633–2651. [Google Scholar] [CrossRef]
- Lu, X.; Wu, Q.; Huang, H. Calibration based on ray-tracing for multi-line structured light projection system. Opt. Express 2019, 27, 35884. [Google Scholar] [CrossRef]
- Holmes, G.C. The use of hyperbolic cosines in solving cubic polynomials. Math. Gaz. 2002, 86, 473–477. [Google Scholar] [CrossRef]
- Zhou, Q.Y.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar]
- Liemert, A.; Kienle, A. Analytical approach for solving the radiative transfer equation in two-dimensional layered media. J. Quant. Spectrosc. Radiat. Transf. 2012, 113, 559–564. [Google Scholar] [CrossRef]
- Liemert, A.; Kienle, A. Exact and efficient solution of the radiative transport equation for the semi-infinite medium. Sci. Rep. 2013, 3, 3–9. [Google Scholar] [CrossRef] [PubMed]
- Bergmann, F.; Foschum, F.; Zuber, R.; Kienle, A. Precise determination of the optical properties of turbid media using an optimized integrating sphere and advanced Monte Carlo simulations. Part 2: Experiments. Appl. Opt. 2020, 59, 3216–3226. [Google Scholar] [CrossRef] [PubMed]
- Crowley, J.; Gordon, G.S. Simulating Medical Applications of Tissue Optical Property and Shape Imaging Using Open-Source Ray Tracing Software; SPIE: Bellingham, WA, USA, 2021; p. 14. [Google Scholar] [CrossRef]
- Naglic, P.; Zelinskyi, Y.; Likar, B.; Pernuš, F.; Bürmen, M. From Monte Carlo Simulations to Efficient Estimation of Optical Properties for Spatial Frequency Domain Imaging; SPIE: Bellingham, WA, USA, 2019; p. 8. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lohner, S.A.; Nothelfer, S.; Kienle, A. Generic and Model-Based Calibration Method for Spatial Frequency Domain Imaging with Parameterized Frequency and Intensity Correction. Sensors 2023, 23, 7888. https://doi.org/10.3390/s23187888
Lohner SA, Nothelfer S, Kienle A. Generic and Model-Based Calibration Method for Spatial Frequency Domain Imaging with Parameterized Frequency and Intensity Correction. Sensors. 2023; 23(18):7888. https://doi.org/10.3390/s23187888
Chicago/Turabian StyleLohner, Stefan A., Steffen Nothelfer, and Alwin Kienle. 2023. "Generic and Model-Based Calibration Method for Spatial Frequency Domain Imaging with Parameterized Frequency and Intensity Correction" Sensors 23, no. 18: 7888. https://doi.org/10.3390/s23187888
APA StyleLohner, S. A., Nothelfer, S., & Kienle, A. (2023). Generic and Model-Based Calibration Method for Spatial Frequency Domain Imaging with Parameterized Frequency and Intensity Correction. Sensors, 23(18), 7888. https://doi.org/10.3390/s23187888