
Reconstruction of a Car–Running Pedestrian Accident Based on a Humanoid Robot Method


Abstract
:1. Introduction
2. Materials and Methods
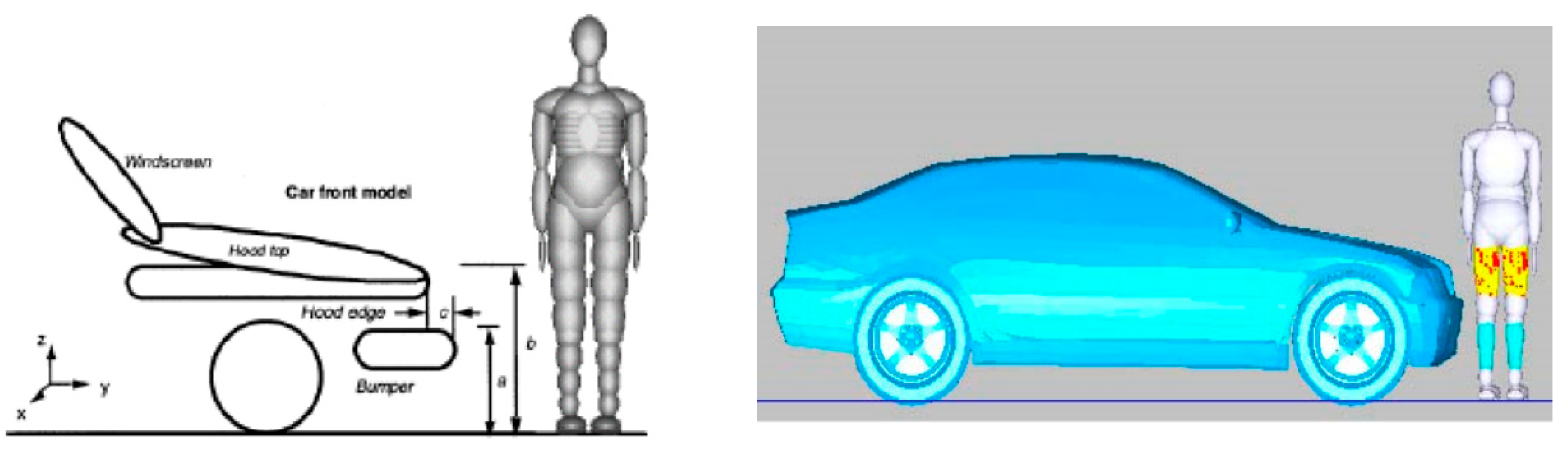
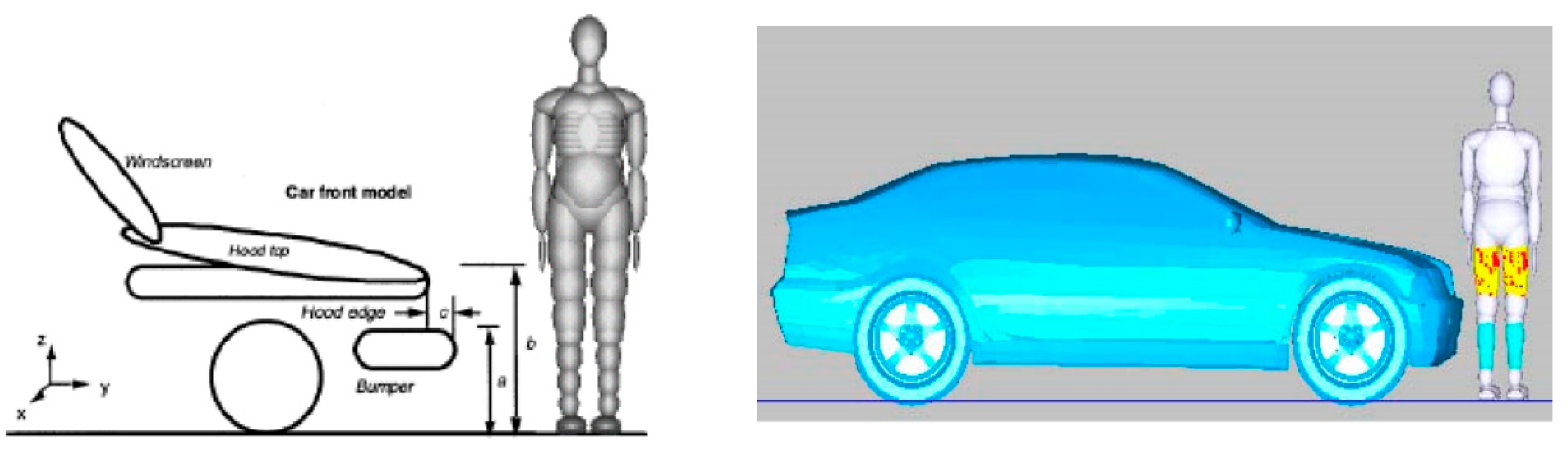
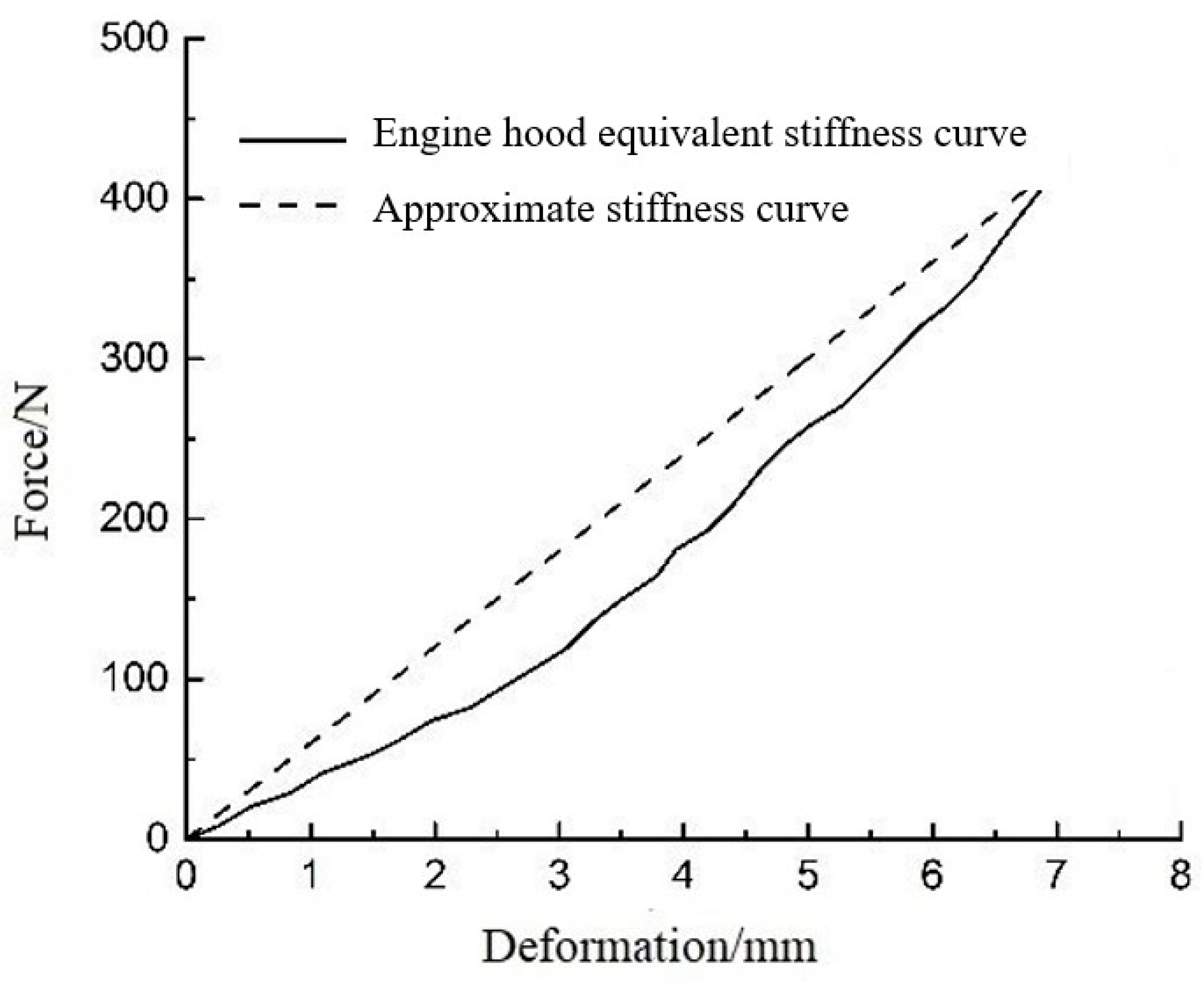
2.1. Facet Vehicle Model
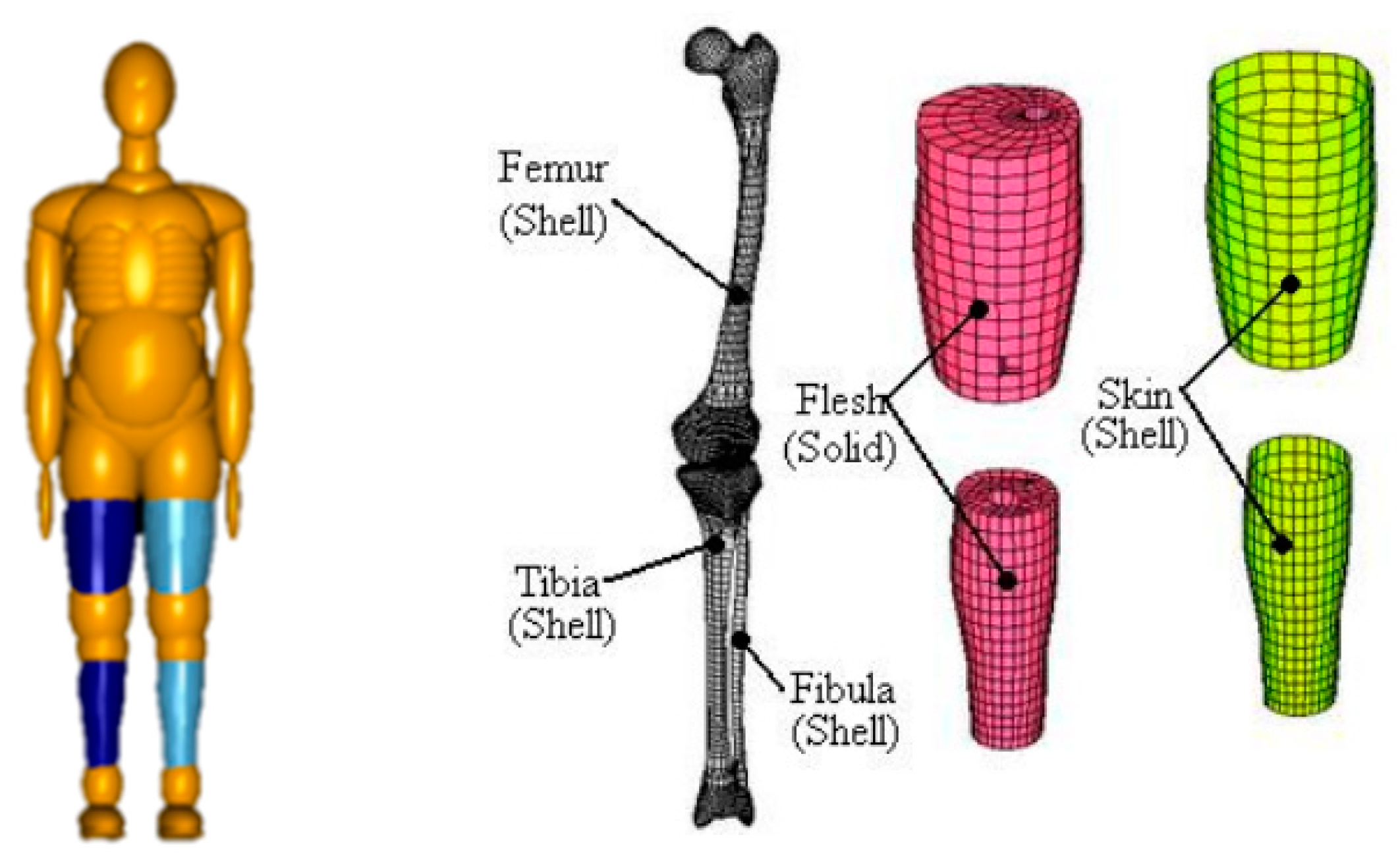
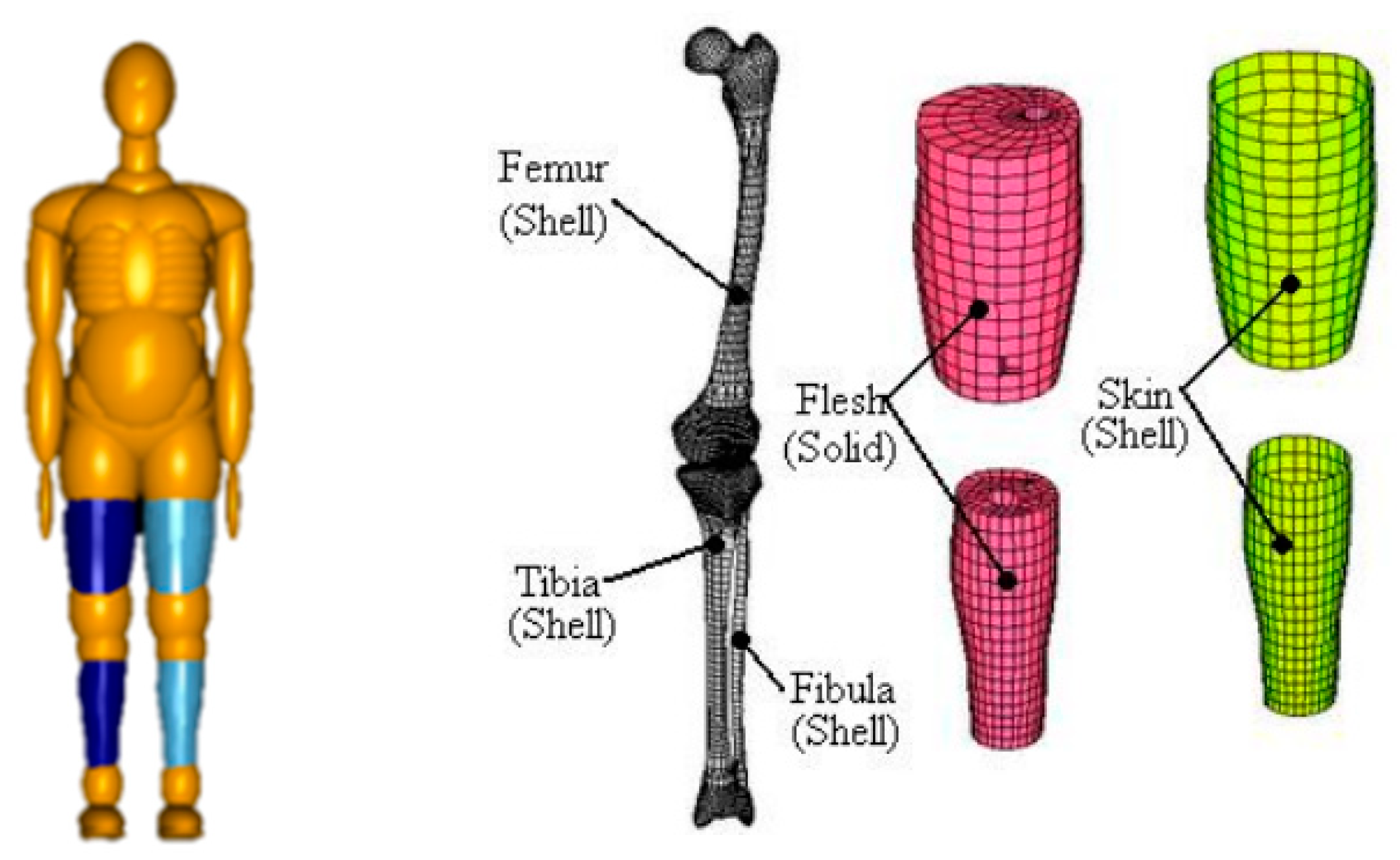
2.2. Rigid–Flexible Coupled HM
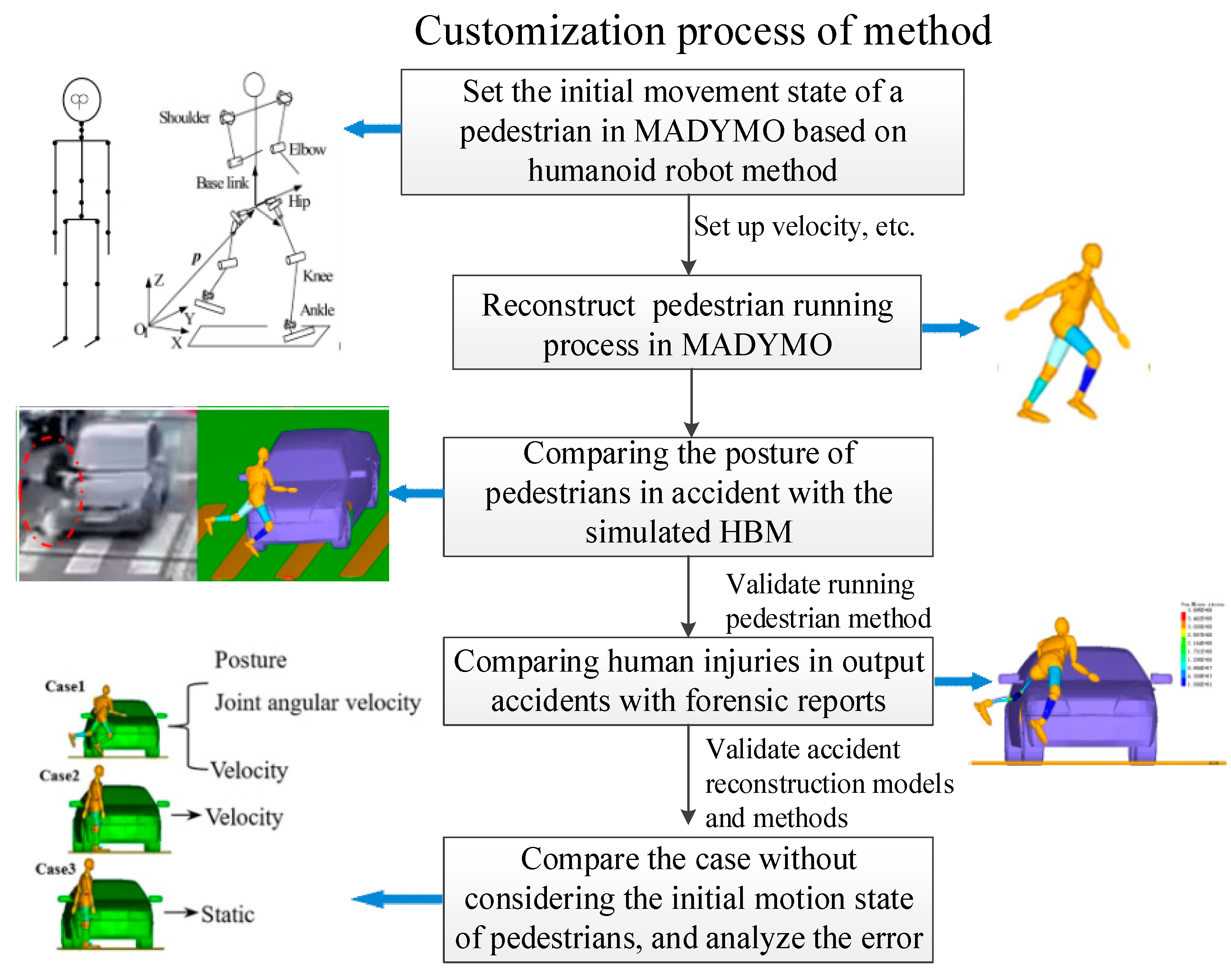
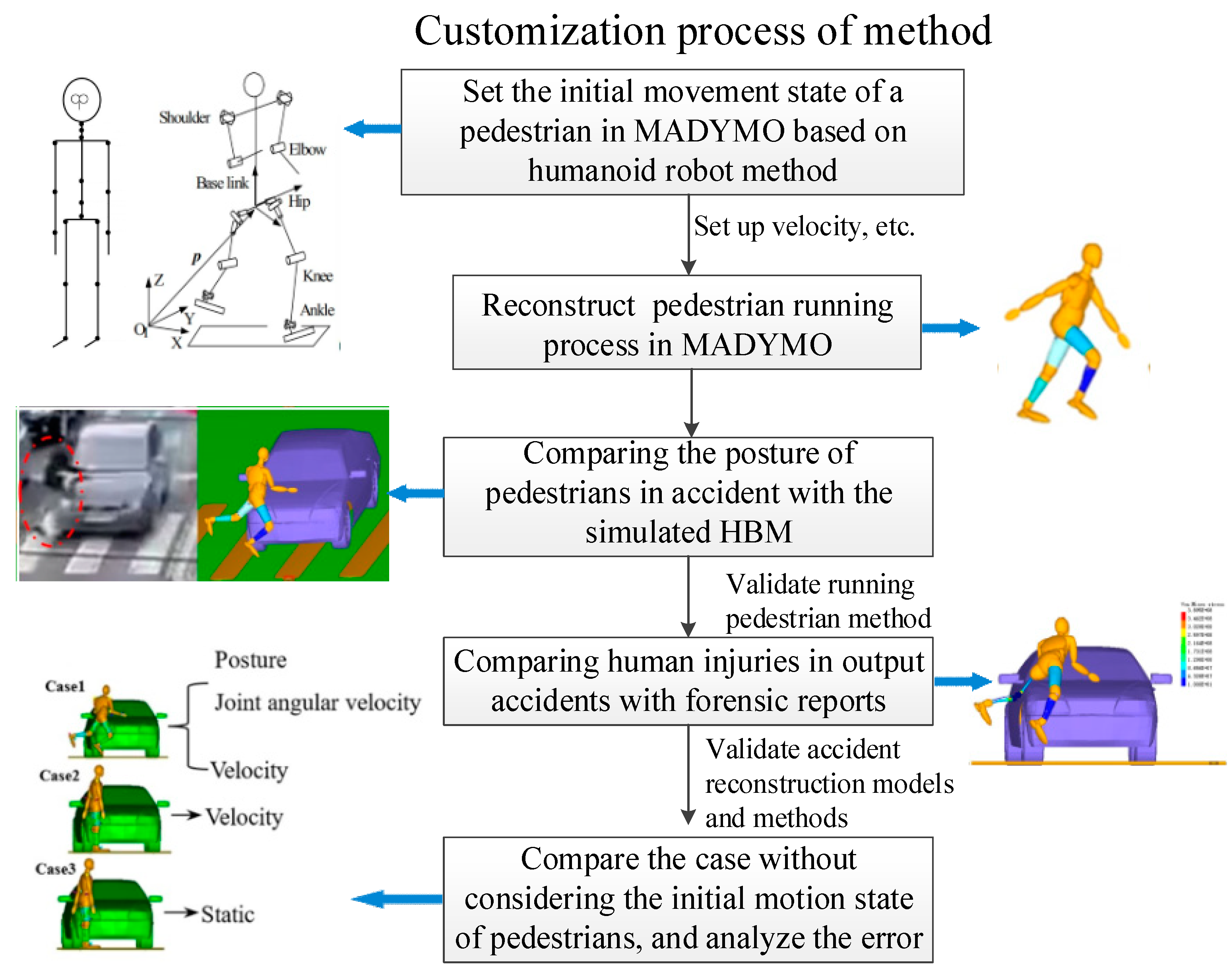
2.3. Determination of Initial Pedestrian Motion State
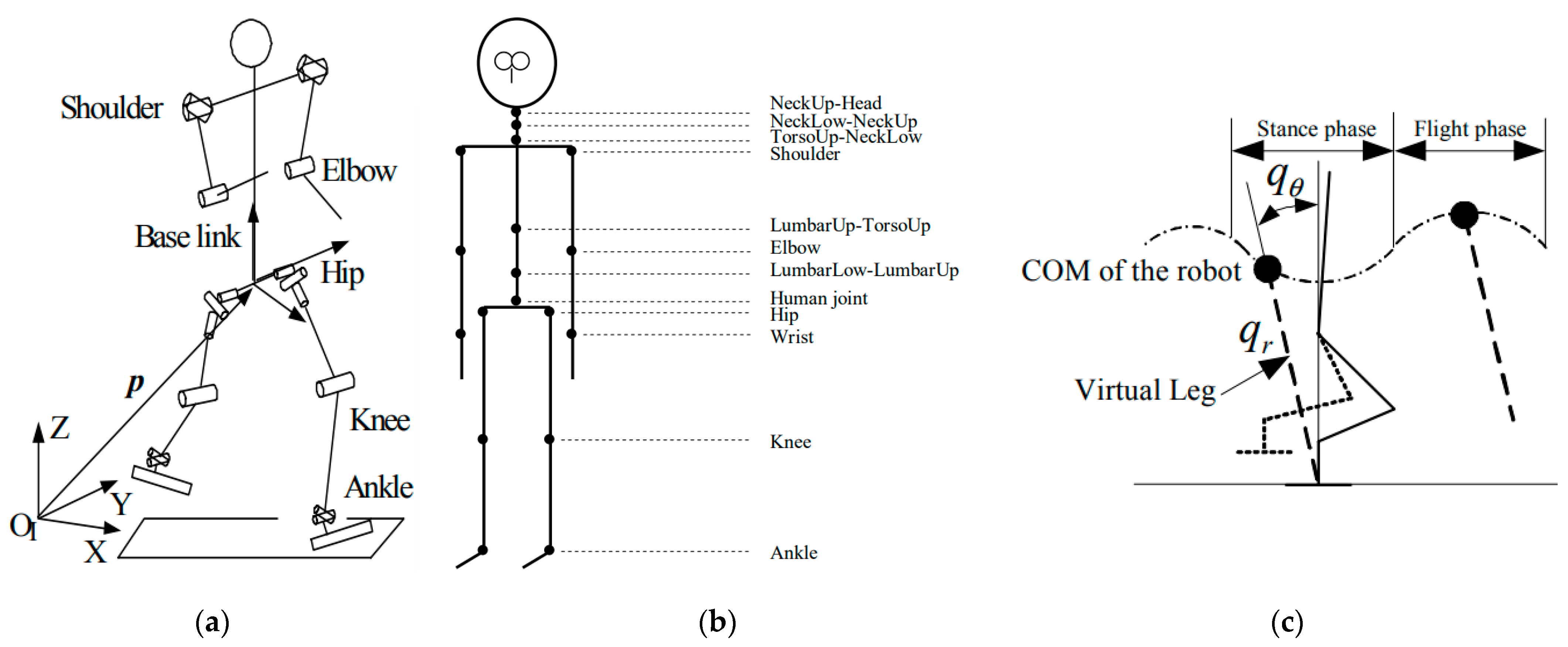
2.3.1. MADYMO Rigid–Flexible Coupled Dynamics Theory
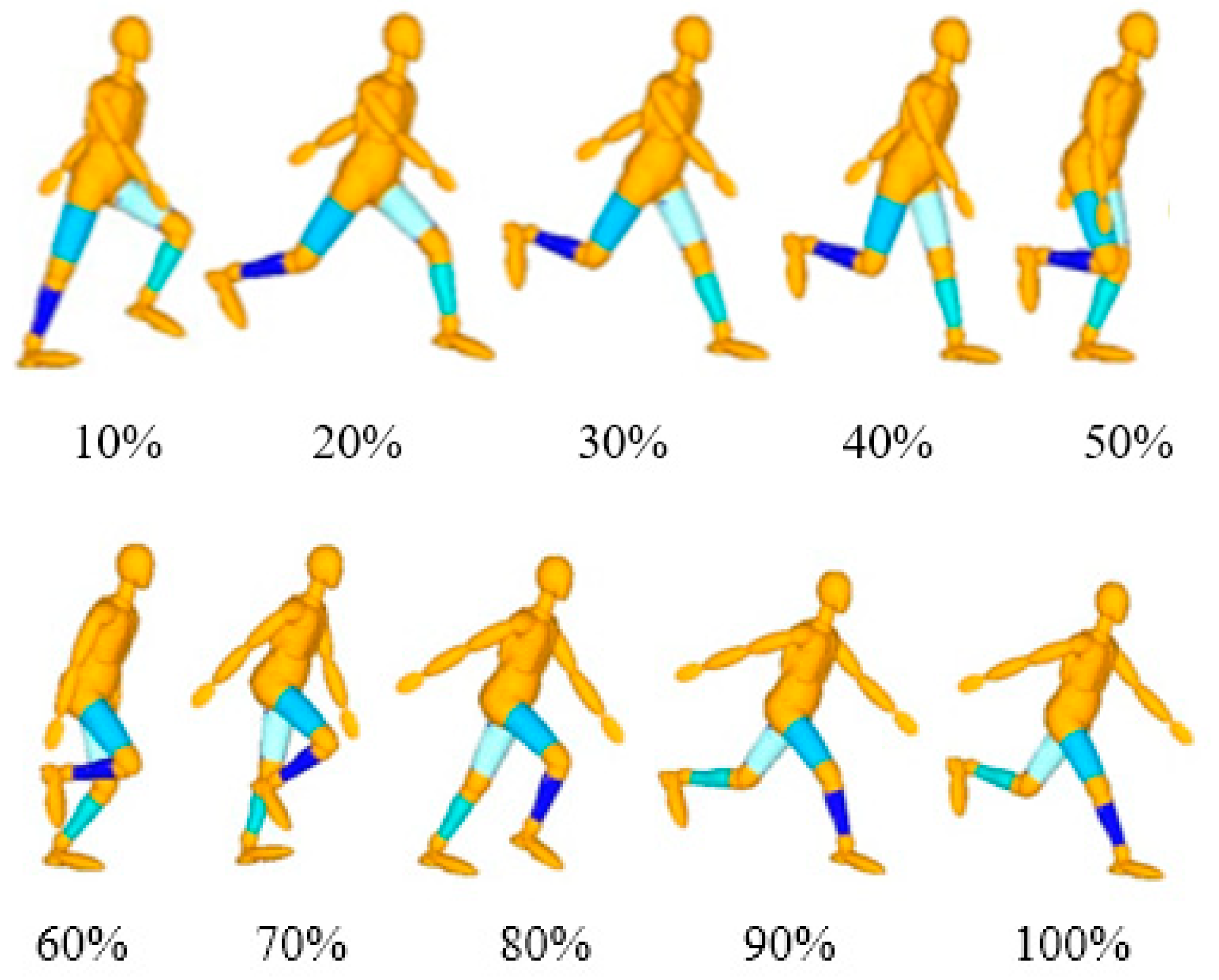
2.3.2. Realization of Pedestrian Running State
3. Examples and Results
3.1. Accident Case Information
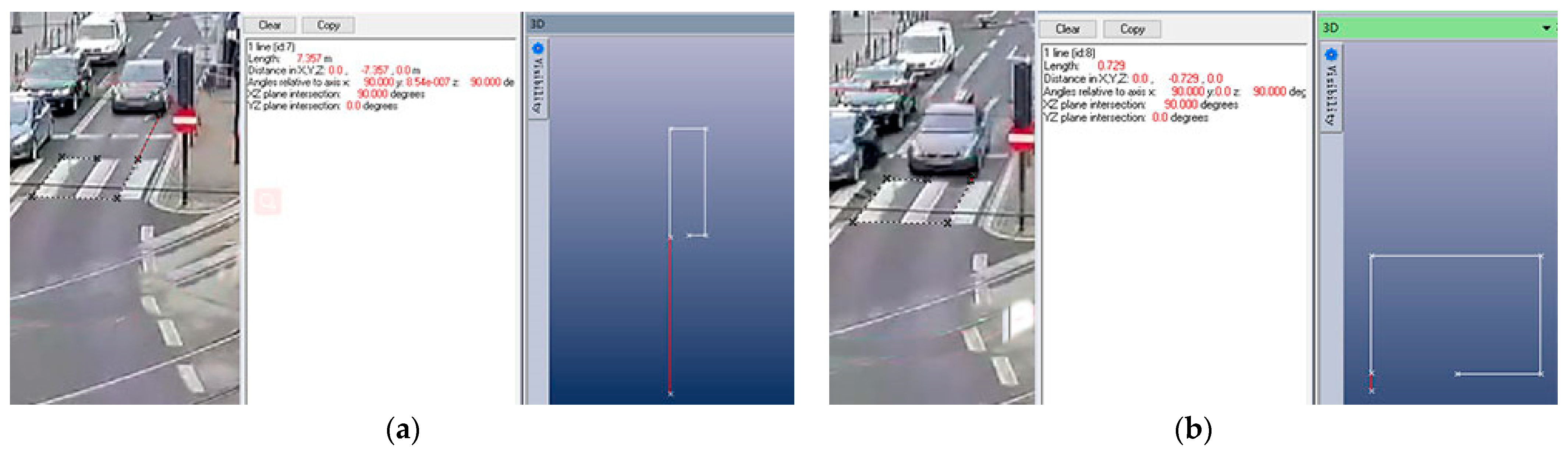
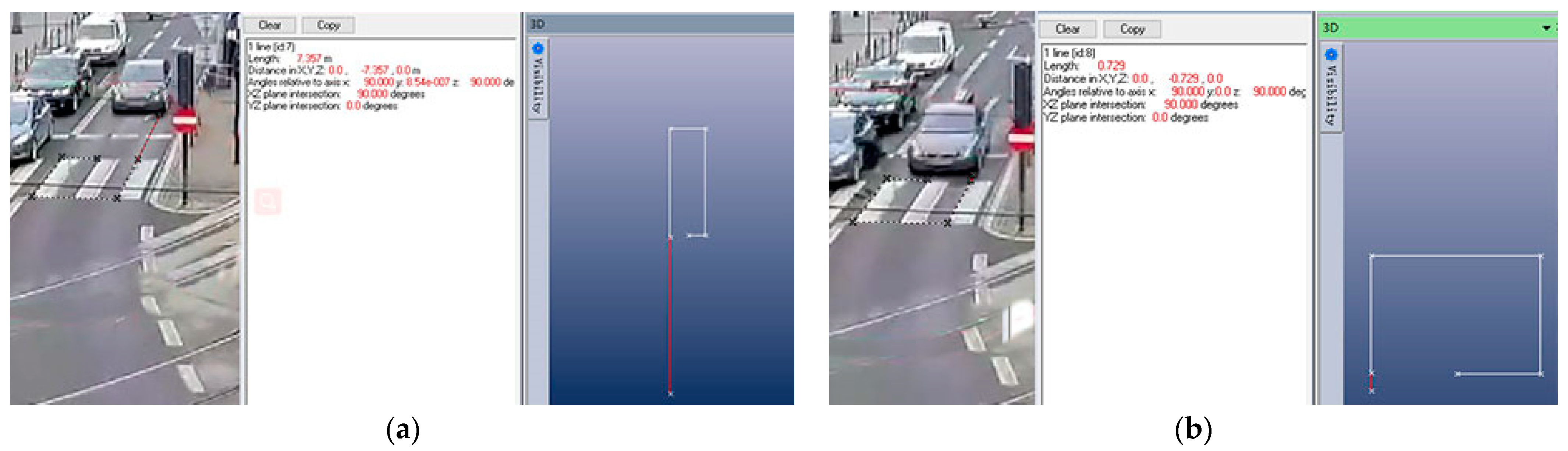
3.2. Determination of Initial Accident Parameters
3.2.1. Initial Velocity of Accident Vehicle
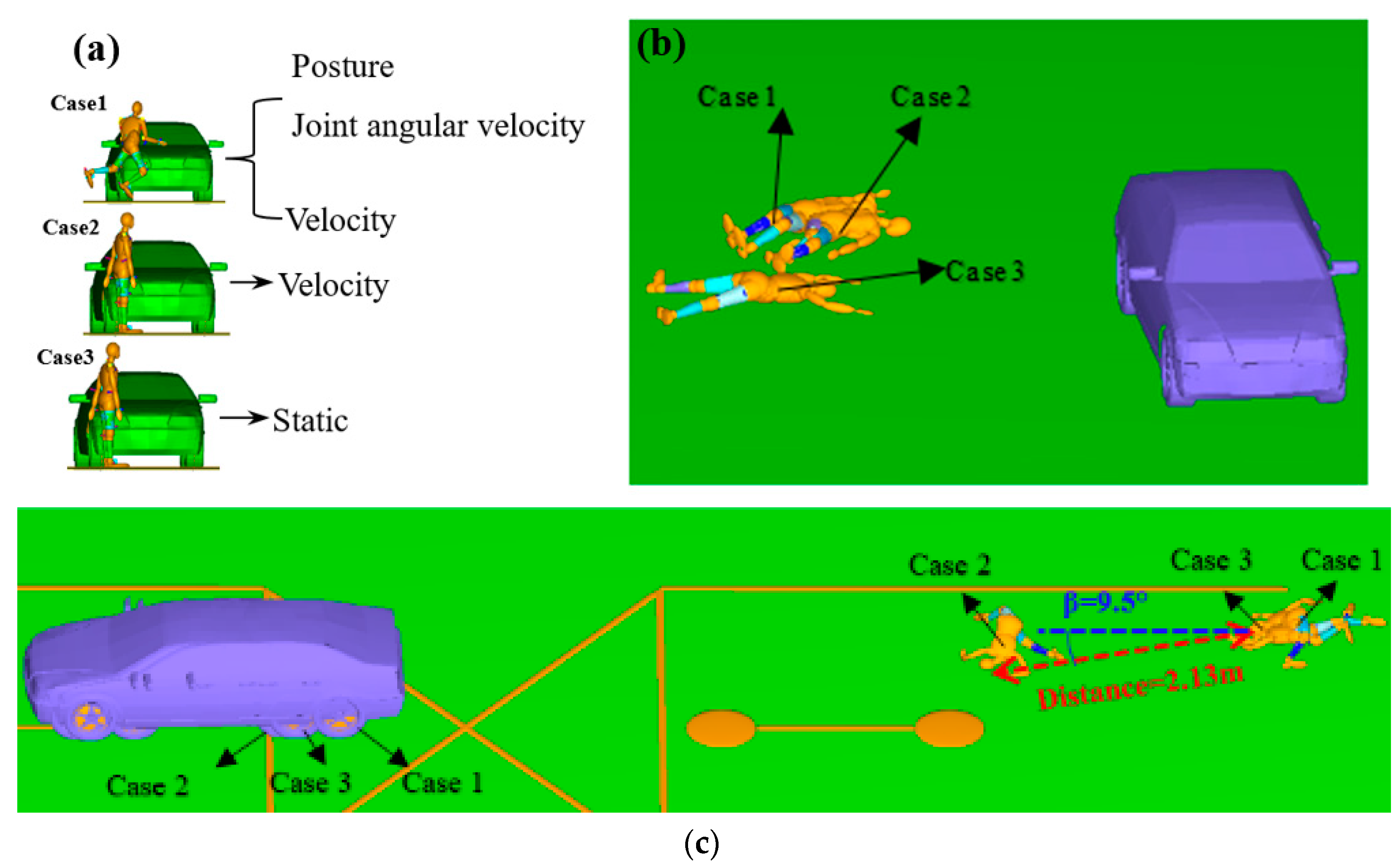
3.2.2. Pedestrian Collision Posture
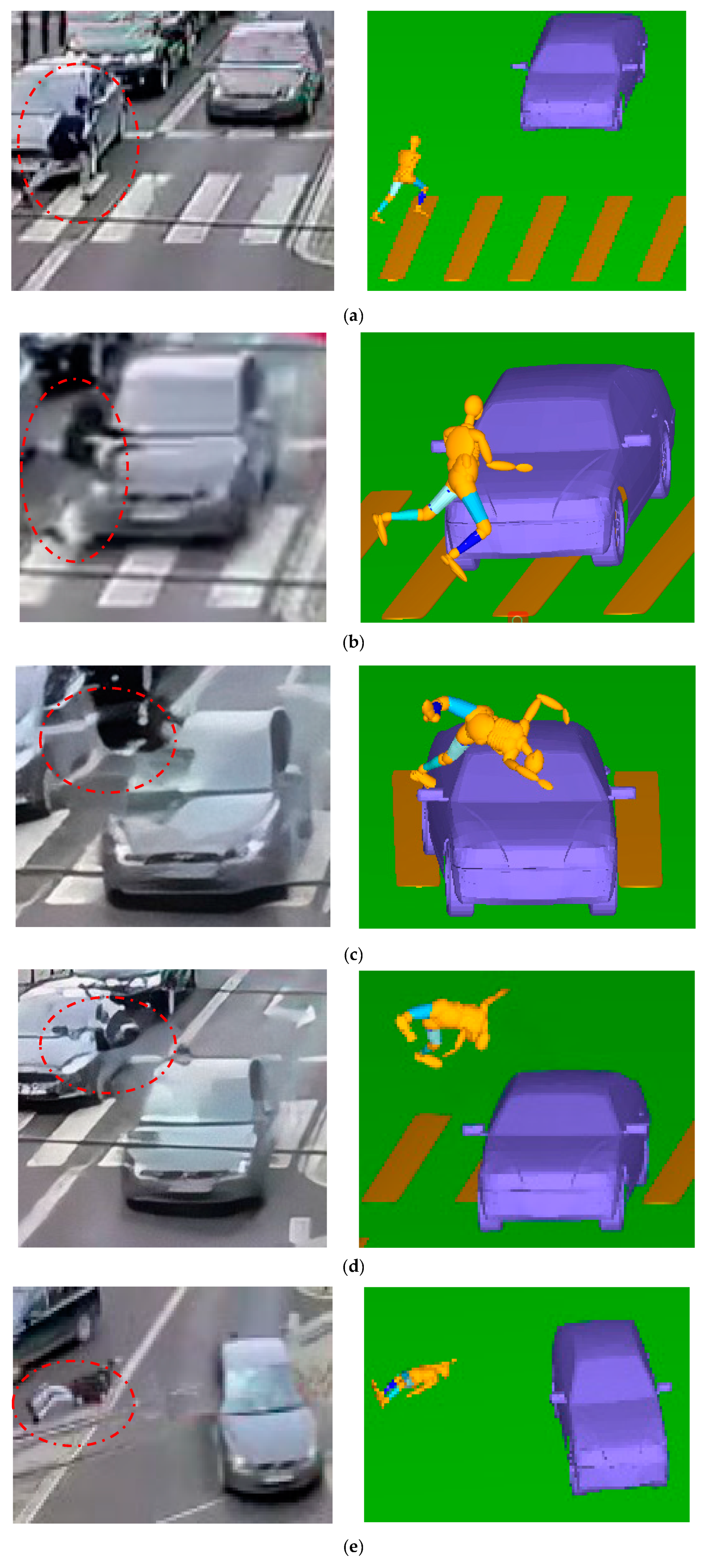
3.3. Accident Case Simulation
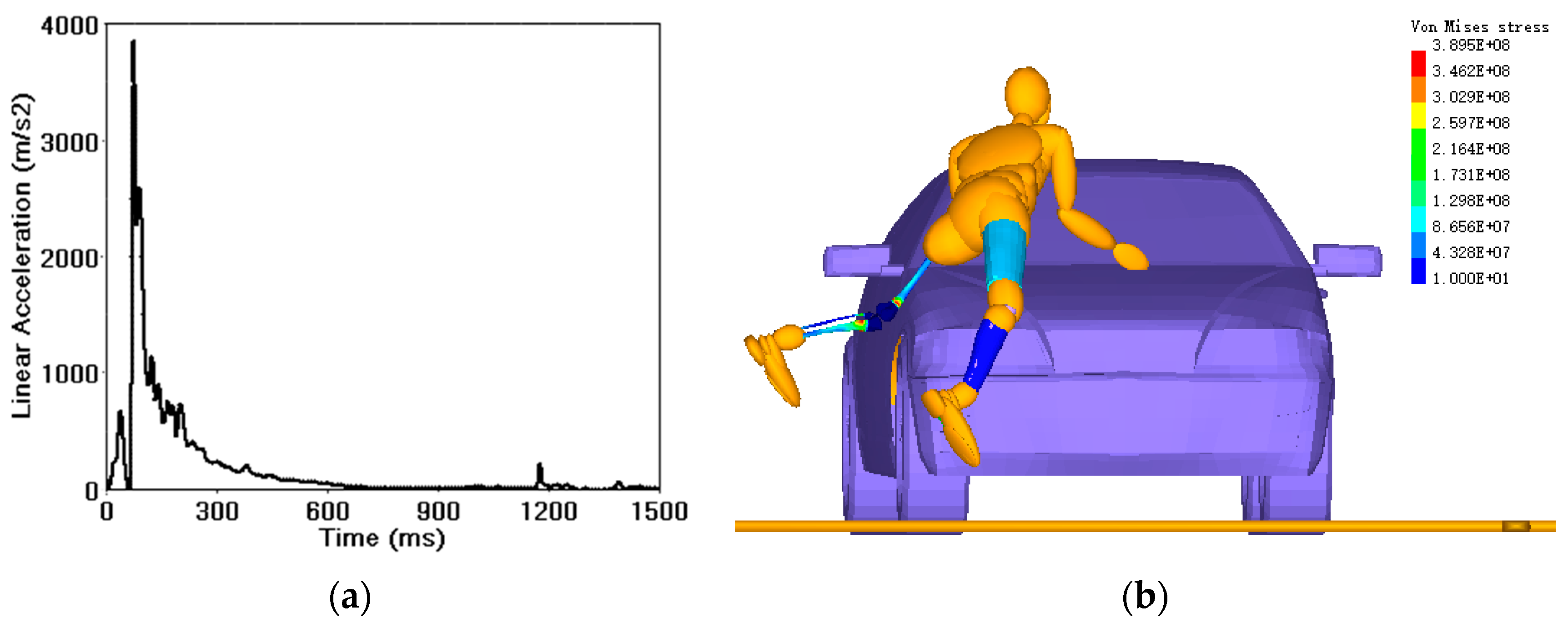
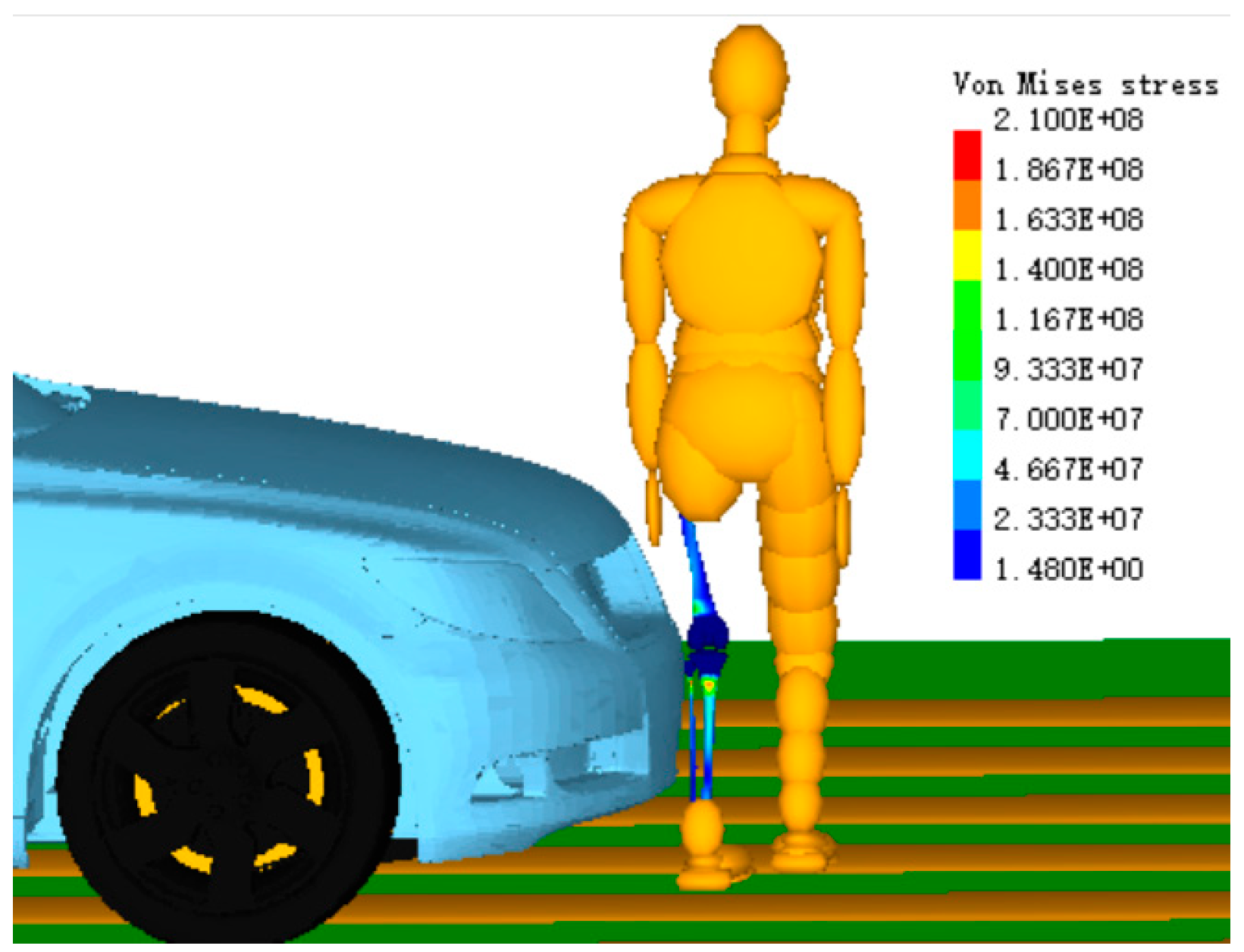
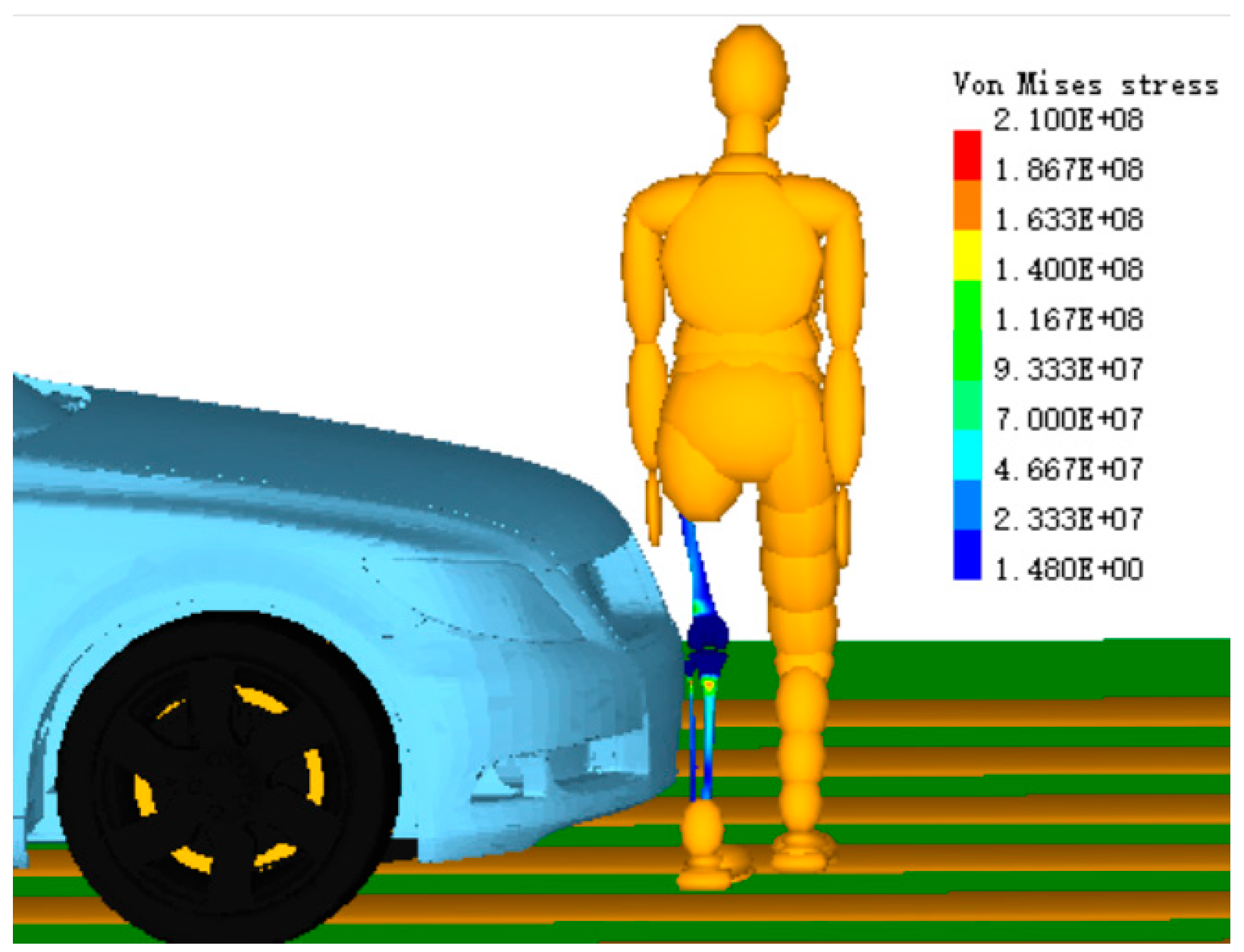
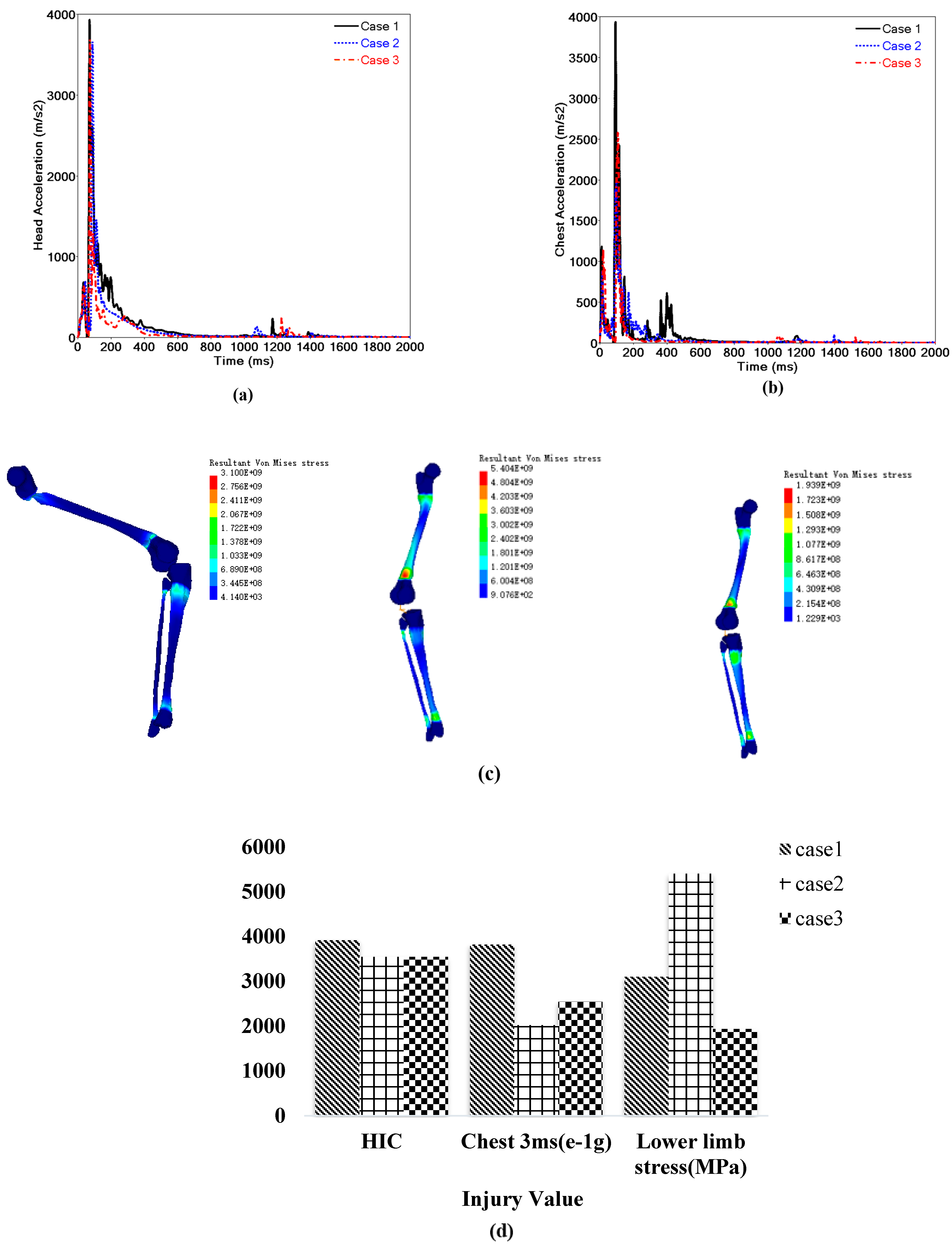
3.4. Human Injury Analysis
3.5. Case Comparative Analysis
3.5.1. Impact Analysis of Thrown Distance and Rest Position
3.5.2. Impact Analysis of Pedestrian Injury
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
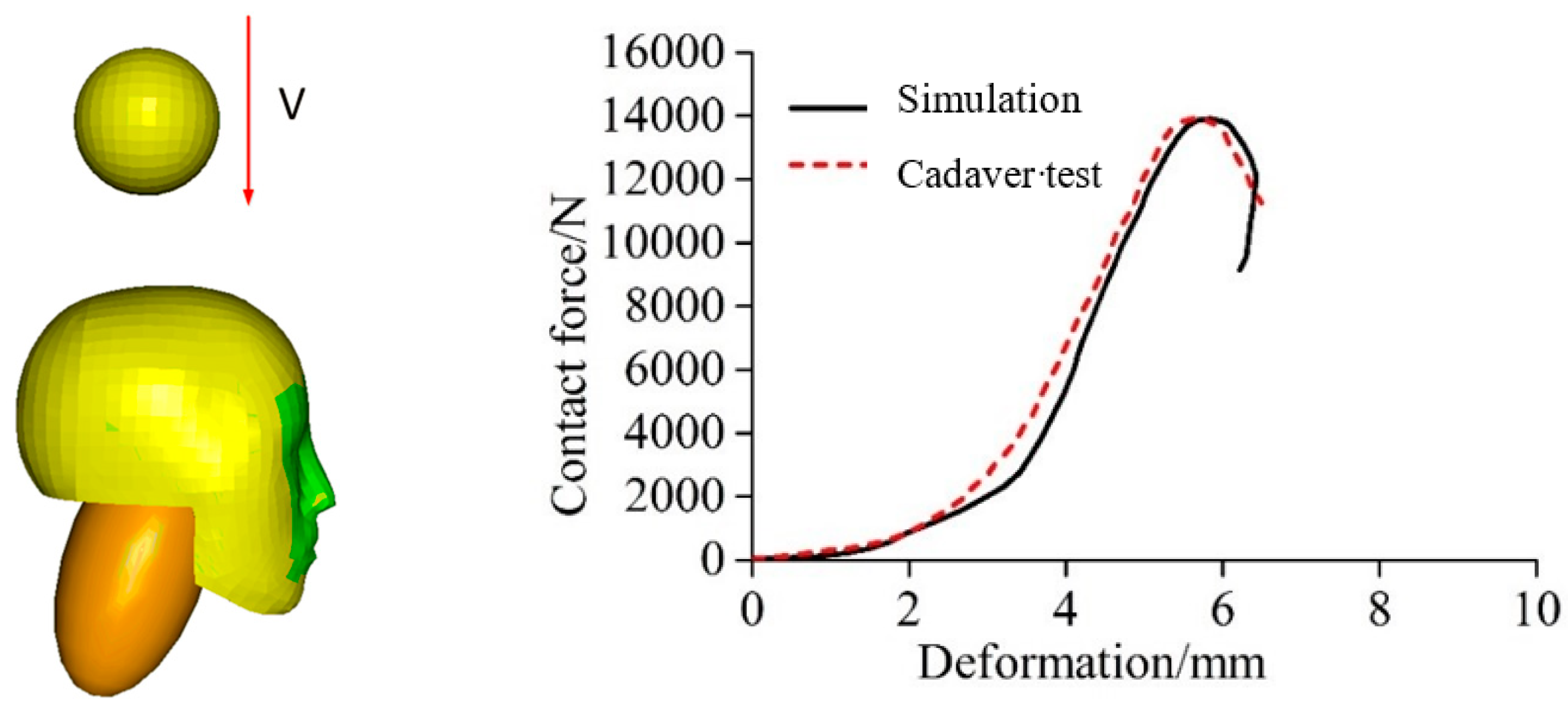
Appendix A. Validation of the Rigid–Flexible Coupled HBM

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Impact Position | Impact Velocity (m/s) | Peak Contact Force (N) | Fracture Pattern of PMHS Tests | ||
|---|---|---|---|---|---|
| PMHS | Simulation | Deviation (%) | |||
| Parietal bone | 7.2 | 14,034 | 14,078 | +0.31 | Linear fractures |
| Parietal bone | 7.6 | 13,579 | 13,693 | +0.84 | Multiple fractures |
| Parietal bone | 8.0 | 11,595 | 11,968 | +3.22 | Annular concave fracture |
| 45° forehead | 7.1 | 13,600 | 13,929 | +2.42 | Multiple fractures |
| 35° occipital bone | 7.3 | 10,009 | 10,173 | +1.64 | Annular concave fracture |

| Body Parts | TNO HBM Test | Hybrid HBM Test | |
|---|---|---|---|
| Experimental Parameters | Experimental Results | Experimental Results | |
| Lower limbs | 40 kg; 4.2, 5.6 m/s | Max_force = 1730, 2450 N | Max_force = 1778, 2365 N |
| Chest | 12, 16 kg; 6.5 m/s | Max_force = 2300, 6800 N | Max_force = 2137, 7187 N |
| Shoulder | 23.4 kg; 5.5 m/s | Max_force = 3170 N | Max_force = 3321 N |
| Test Number | Car | Corpse Sample | |||||
|---|---|---|---|---|---|---|---|
| Velocity | a | b | c | Age; Gender | Height | Weight | |
| T6 | 32 km/h | 380 mm | 730 mm | 247 mm | 52 years old; female | 178 cm | 65 kg |
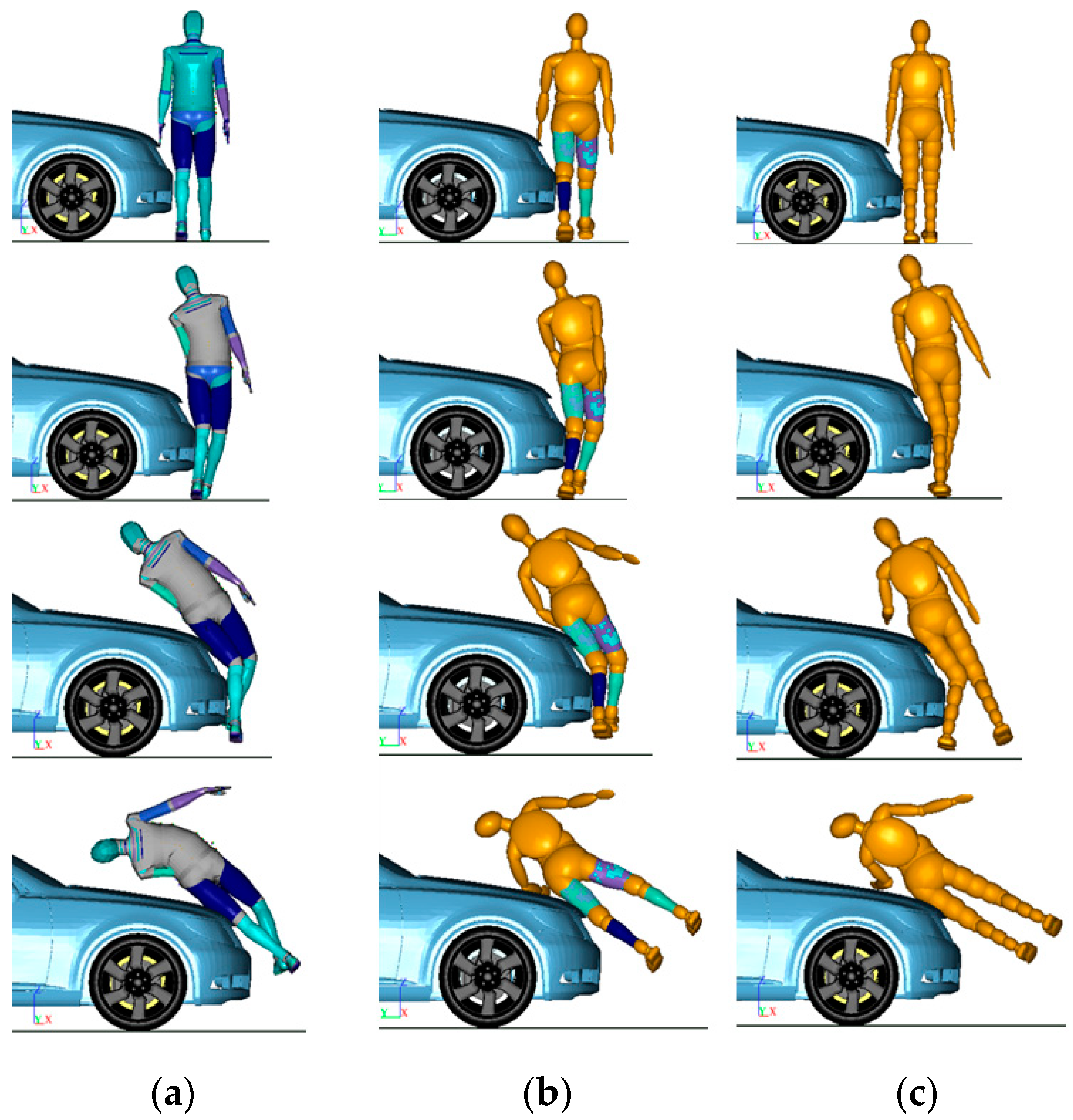
| Human Model | TNO | Hybrid | FE |
|---|---|---|---|
| Simulation time | 1 h 16 min 17 s | 1 h 45 min 36 s | 3 h 26 min 45 s |
References
- Shen, J.; Jin, X.; Zhang, X. Automatic optimization method for automobile-pedestrian collision accident reproduction. J. Mech. Eng. 2009, 45, 266–271. [Google Scholar] [CrossRef]
- Traffic Management Bureau of the Ministry of Public Security. Annual Report of Road Traffic Accident Statistics of the People’s Republic of China; Traffic Management Bureau of the Ministry of Public Security: Beijing, China, 2018.
- NHTSA. Traffic Safety Facts; Department of Transportation, National Highway Traffic Safety Administration: Washington, DC, USA, 2021.
- Wang, Q.; Lou, Y.; Li, T.; Jin, X. Development and application of digital human models in the field of vehicle collisions: A review. Ann. Biomed. Eng. 2021, 49, 1619–1632. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Lou, Y.; Jin, X.; Kong, L.; Qin, C.; Hou, X. Reverse reconstruction of two-wheeled vehicle accident based on facet vehicle model and hybrid human model. Int. J. Crashworthiness 2020, 27, 661–676. [Google Scholar] [CrossRef]
- Fahlstedt, M.; Halldin, P.; Kleiven, S. Comparison of multibody and finite element human body models in pedestrian accidents with the focus on head kinematics. Traffic Inj. Prev. 2016, 17, 320–327. [Google Scholar] [CrossRef] [PubMed]
- Untaroiu, C.D.; Meissner, M.U.; Crandall, J.R.; Takahashi, Y.; Okamoto, M.; Ito, O. Crash reconstruction of pedestrian accidents using optimization techniques. Int. J. Impact Eng. 2009, 36, 210–219. [Google Scholar] [CrossRef]
- Montoya, D.; Thollon, L.; Llari, M.; Perrin, C.; Behr, M. Head injury criteria in child pedestrian accidents. Int. J. Crashworthiness 2017, 23, 497–506. [Google Scholar] [CrossRef]
- Sun, P.; Gu, Y.; Mao, H.; Chen, Z.; Li, Y. Research on Walking Gait Planning and Simulation of a Novel Hybrid Biped Robot. Biomimetics 2023, 8, 258. [Google Scholar] [CrossRef]
- Lahr, D.; Orekhov, V.; Lee, B.; Hong, D. Early developments of a parallelly actuated humanoid, SAFFiR. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Portland, OR, USA, 4–7 August 2013; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 55942. [Google Scholar] [CrossRef]
- Meng, X.; Yu, Z.; Chen, X.; Huang, Z.; Dong, C.; Meng, F. Online Running-Gait Generation for Bipedal Robots with Smooth State Switching and Accurate Speed Tracking. Biomimetics 2023, 8, 114. [Google Scholar] [CrossRef]
- Wang, S.; Chen, H.; Zhang, Y. Bionic Artificial Neural Networks in Medical Image Analysis. Biomimetics 2023, 8, 211. [Google Scholar] [CrossRef]
- Shen, J.; Jin, X.; Guo, L.; Zhang, X. Research on Pedestrian’s Initial State in Pedestri-an and Vehicle Collision. J. Shanghai Jiaotong Univ. 2007, 268–271. [Google Scholar] [CrossRef]
- Dutta, A.; Breloff, S.P.; Dai, F.; Sinsel, E.W.; Warren, C.M.; Carey, R.E.; Wu, J.Z. Effects of working posture and roof slope on activation of lower limb muscles during shingle installation. Ergonomics 2020, 63, 1182–1193. [Google Scholar] [CrossRef] [PubMed]
- Garcia, M.-G.; Tapia, P.; Läubli, T.; Martin, B.J. Physiological and neuromotor changes induced by two different stand-walk-sit work rotations. Ergonomics 2019, 63, 163–174. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Tang, J.; Shen, W.; Zhou, Q. Influence of walking on knee ligament response in car-to-pedestrian collisions. Front. Bioeng. Biotechnol. 2023, 11, 1141390. [Google Scholar] [CrossRef] [PubMed]
- Maeno, T.; Hasegawa, J. Development of a finite element model of the total human model for safety (THUMS) and application to car–pedestrain impacts. In Proceedings of the 17th ESV Conference, Amsterdam, The Netherlands, 4–7 June 2001; Available online: https://www.sae.org/publications/technical-papers/content/2001-06-0054/ (accessed on 19 January 2021).
- Soni, A.; Robert, T.; Rongiéras, F.; Beillas, P. Observations on Pedestrian Pre-Crash Reactions during Simulated Accidents. Stapp Car Crash J. 2013, 57, 157–183. [Google Scholar] [CrossRef]
- Bini, R.; Wundersitz, D.; Kingsley, M. Biomechanical and physiological responses to electrically assisted cycling during simulated mail delivery. Appl. Ergon. 2018, 75, 243–249. [Google Scholar] [CrossRef]
- Hamdane, H.; Serre, T.; Masson, C.; Anderson, R. Relevant factors for active pedestrian safety based on 100 real accident reconstructions. Int. J. Crashworthiness 2015, 21, 51–62. [Google Scholar] [CrossRef]
- Li, Z.; Huang, H.; Li, D.; Li, P. Analysis of Influencing Factors of Pedestrian-Vehicle Accident Reconstruction Based on Pc-Crash. In Proceedings of the International Conference on Education, Seville, Spain, 18–20 November 2015. [Google Scholar] [CrossRef]
- Mizuno, K.; Yamada, H.; Mizuguchi, H.; Ito, D.; Han, Y.; Hitosugi, M. The influence of lower extremity postures on kinematics and injuries of cyclists in vehicle side collisions. Traffic Inj. Prev. 2016, 17, 618–624. [Google Scholar] [CrossRef]
- Choudhary, P.; Velaga, N.R. Mobile phone use during driving: Effects on speed and effectiveness of driver compensatory behaviour. Accid. Anal. Prev. 2017, 106, 370–378. [Google Scholar] [CrossRef]
- Untaroiu, C.D.; Crandall, J.R.; Takahashi, Y.; Okamoto, M.; Ito, O.; Fredriksson, R. Analysis of running child pedestrians impacted by a vehicle using rigid-body models and optimization techniques. Saf. Sci. 2010, 48, 259–267. [Google Scholar] [CrossRef]
- Kong, L.; Qin, C.; Jin, X.; Hou, X.; Qiu, Z. Simulation of Vehicle-Motorcycle Collision Accident Based on Facet Model and Combined Dummy. J. Vib. Shock. 2018, 37, 44–50. [Google Scholar]
- Gao, S.; Li, M.; Wang, Q.; Jin, X.; Hou, X.; Qin, C.; Fu, S. A Research on Accident Reconstruction of Bus-Two-Wheeled Vehicle Based on Vehicle Damage and Human Head Injury. Int. J. Environ. Res. Public Health 2022, 19, 14950. [Google Scholar] [CrossRef]
- TNO Automotive China. Facet Surface and FE Contact Modeling-Guidelines. 2014, pp. 10–31. Available online: http://wenku.baidu.com/link?url=6wzbVpbCm2oO_bi3ytwhzKKAmRTXnIjUUAnNOfYXkytgJYGVErRjfhx7urHAJpdA3NqGU7giMCWZwD5Zw7JvWZIxid0LF3Uf4lTm8az3VjC (accessed on 19 January 2021).
- Zhu, T.; Kong, X.; Suo, Q. Static stiffness analysis of car engine hood. J. Hebei Univ. Eng. (Nat. Sci. Ed.) 2013, 30, 87–91. [Google Scholar] [CrossRef]
- Chai, X. The Optimization Method and Application of Pedestrian Traffic Accident Reco-Nstruction Based on Knockdown Human; Shanghai Jiao Tong University: Shanghai, China, 2010; Available online: http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2011560 (accessed on 19 January 2021).
- Saranli, U.; Schwind, W.; Koditschek, D. Toward the control of a multi-jointed, monoped runner. In Proceedings of the IEEE International Conference on Robotics & Automation, Washington, DC, USA, 11–15 May 2002. [Google Scholar] [CrossRef]
- Li, Z.; Huang, Q.; Li, K.; Duan, X. Stability criterion and pattern planning for humanoid running Robot. In Proceedings of the IEEE International Conference on Robotics & Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar] [CrossRef]
- Wei, H.; Wu, W.; Liu, M. Simulation of the Humanoid Running Robot Based on ADAMS. In Proceedings of the Tenth International Conference on Computer Modeling and Simulation, Cambridge, UK, 27–29 March 2008; pp. 726–731. [Google Scholar] [CrossRef]
- Wei, X.; Liu, M. Realization of Sagittal Running of Humanoid Running Robot. Robot 2006, 28, 5–9. [Google Scholar] [CrossRef]
- Zhang, X.; Jin, X.; Chai, X.; Shen, J.; Hou, X. Modeling and analysis method of vehicle-pedestrian crash accidents based on contact characters. J. Mech. Eng. 2012, 48, 104–111. [Google Scholar] [CrossRef]
- TNO. MADYMO Reference Manual Version 7.5; TNO: The Hague, The Netherlands, 2013. [Google Scholar]
- Nie, J. Research on Epidemiology and Head Injury of Traffic Injuries among Pedestrians and Bicycle Riders; Hunan University: Changsha, China, 2014; Available online: http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D576942 (accessed on 19 January 2021).
- Niebuhr, T.; Junge, M.; Achmus, S. Pedestrian injury risk functions based on contour lines of equal injury severity using real world pedestrian/passenger-car accident data. Ann. Adv. Automot. Med. 2013, 57, 145–154. [Google Scholar] [PubMed]
- Linder, A.; Douglas, C.; Clark, A.; Fildes, B. Mathematical Simulations of Real World Pedest-Rian Vehicle Collision. [DB/OL]. (2005-06-06). 2005. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.489.151 (accessed on 19 January 2021).
- Yoganandan, N.; Pintar, F.A.; Sances, A.; Walsh, P.R.; Ewing, C.L.; Thomas, D.J.; Snyder, R.G.; Kroll, M.W.; Adamec, J.; Wetli, C.V.; et al. Biomechanics of Skull Fracture. J. Neurotrauma 1995, 12, 659–668. [Google Scholar] [CrossRef] [PubMed]
- Yang, J. Injury Biomechanics in Car-Pedestrian Collisions: Development, Validation and Application of Human-Body Mathematical Models; Chalmers University of Technology: Göteborg, Sweden, 1997; Available online: https://research.chalmers.se/publication/1254 (accessed on 19 January 2021).
- Chai, X.; Jin, X.; Zhang, X.; Hou, X. The application for skull injury in vehicle–pedestrian accident. International Int. J. Crashworthiness 2011, 16, 11–24. [Google Scholar] [CrossRef]
- Kajzer, J.; Cavallero, C.; Ghanouchi, S.; Bonnoit, J.; Ghorbel, A. Response of the knee joint in lateral impact: Effect of shearing loads. Pediatriia 1990, 22, 70–73. Available online: http://www.ircobi.org/wordpress/downloads/irc1993/pdf_files/1993_7.pdf (accessed on 19 January 2021).
- Viano, D.C.; King, A.I.; Melvin, J.W.; Weber, K. Injury biomechanics research: An essential element in the prevention of trauma. J. Biomech. 1989, 22, 403–417. [Google Scholar] [CrossRef]
- Roberts, A.; Lowne, R.; Beusenberg, M.C.; Cesari, D. Test procedures for defining biofidelity targets for lateral impact test dummies. In Proceedings of the International Technical Conference Enhanced Safety Vehicles, Yokohama, Japan, 3–6 April 1993; National Highway Traffic Safety Administration: Washington, DC, USA, 1993; pp. 956–967. Available online: https://trid.trb.org/view.aspx?id=409156 (accessed on 19 January 2021).
- Crandall, J.R.; Portier, L.; Petit, P.; Hall, G.W.; Bass, C.R.; Klopp, G.S.; Hurwitz, S.; Pilkey, W.D.; Trosseille, X.; Tarrière, C.; et al. Biomechanical Response and Physical Properties of the Leg, Foot, and Ankle. In Proceedings of the Paper Presented at the 40th Stapp Car Crash Conference, Albuquerque, NM, USA, 4 November 1996. [Google Scholar] [CrossRef]





| Case | Pedestrian Running Posture | Pedestrian Velocity |
|---|---|---|
| 1 | Consistent with running dynamic process | Consistent with running dynamic process |
| 2 | Known accident information statistics | Overall translation initial velocity |
| 3 | Known accident information statistics | Static condition |
| Body Joint | Angle(s) (rad) | Body Part | Angular Velocity (rad/s) |
|---|---|---|---|
| HipL | R2 = 0.875 | Lower left arm | 2.0305 |
| KneeL | R1 = 0.56 | Upper left arm | 2.2748 |
| TibiaL | R1 = −0.015; R2 = −0.205 | Lower right arm | 2.0295 |
| HipR | R2 = −0.345 | Upper right arm | 2.2739 |
| KneeR | R1 = 1.37 | Left thigh | 2.0335 |
| ElbowL | R2 = −1.045 | Left calf | 4.7907 |
| ElbowR | R1 = 0.52; R2 = −0.965 | Right thigh | 3.0025 |
| LumbarLow-LumbarUp | R1 = −0.785; R2 = 0.305 | Right calf | 1.2093 |
| NeckLow-NeckUp | R2 = −0.25 | - | - |
| ShoulderL | R1 = −1.61; R2 = 0.15708 | - | - |
| ShoulderR | R1 = −1.645; R2 = −0.232 | - | - |
| Body Part | Autopsy Results | Injury Value of Simulation Results | Injury Limit Value |
|---|---|---|---|
| Head | Depressed fracture of skull, contusion of brain tissue | HIC = 3913 | 1000 |
| Left lower limb | Fractures of tibia and femur of left lower limb | Maximum shear force: 389.5 MPa | 124 MPa |
| Relative Errors | HIC | Chest 3 ms | Lower Limb Stress |
|---|---|---|---|
| Case 2 with case 1 | 9.4% | 47.0% | 74.3% |
| Case 3 with case 1 | 9.4% | 33.4% | 37.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Wei, B.; Wei, Z.; Gao, S.; Jin, X.; Yang, P. Reconstruction of a Car–Running Pedestrian Accident Based on a Humanoid Robot Method. Sensors 2023, 23, 7882. https://doi.org/10.3390/s23187882
Wang Q, Wei B, Wei Z, Gao S, Jin X, Yang P. Reconstruction of a Car–Running Pedestrian Accident Based on a Humanoid Robot Method. Sensors. 2023; 23(18):7882. https://doi.org/10.3390/s23187882
Chicago/Turabian StyleWang, Qian, Bo Wei, Zheng Wei, Shang Gao, Xianlong Jin, and Peizhong Yang. 2023. "Reconstruction of a Car–Running Pedestrian Accident Based on a Humanoid Robot Method" Sensors 23, no. 18: 7882. https://doi.org/10.3390/s23187882
APA StyleWang, Q., Wei, B., Wei, Z., Gao, S., Jin, X., & Yang, P. (2023). Reconstruction of a Car–Running Pedestrian Accident Based on a Humanoid Robot Method. Sensors, 23(18), 7882. https://doi.org/10.3390/s23187882