


Energy-Efficient IoT-Based Light Control System in Smart Indoor Agriculture



Abstract
:1. Introduction
2. Literature Review
3. Plants Light Requirements
3.1. Photosynthetically Active Radiation
3.2. Far Red Light Effect
3.3. Ultraviolet (UV) Light Effect
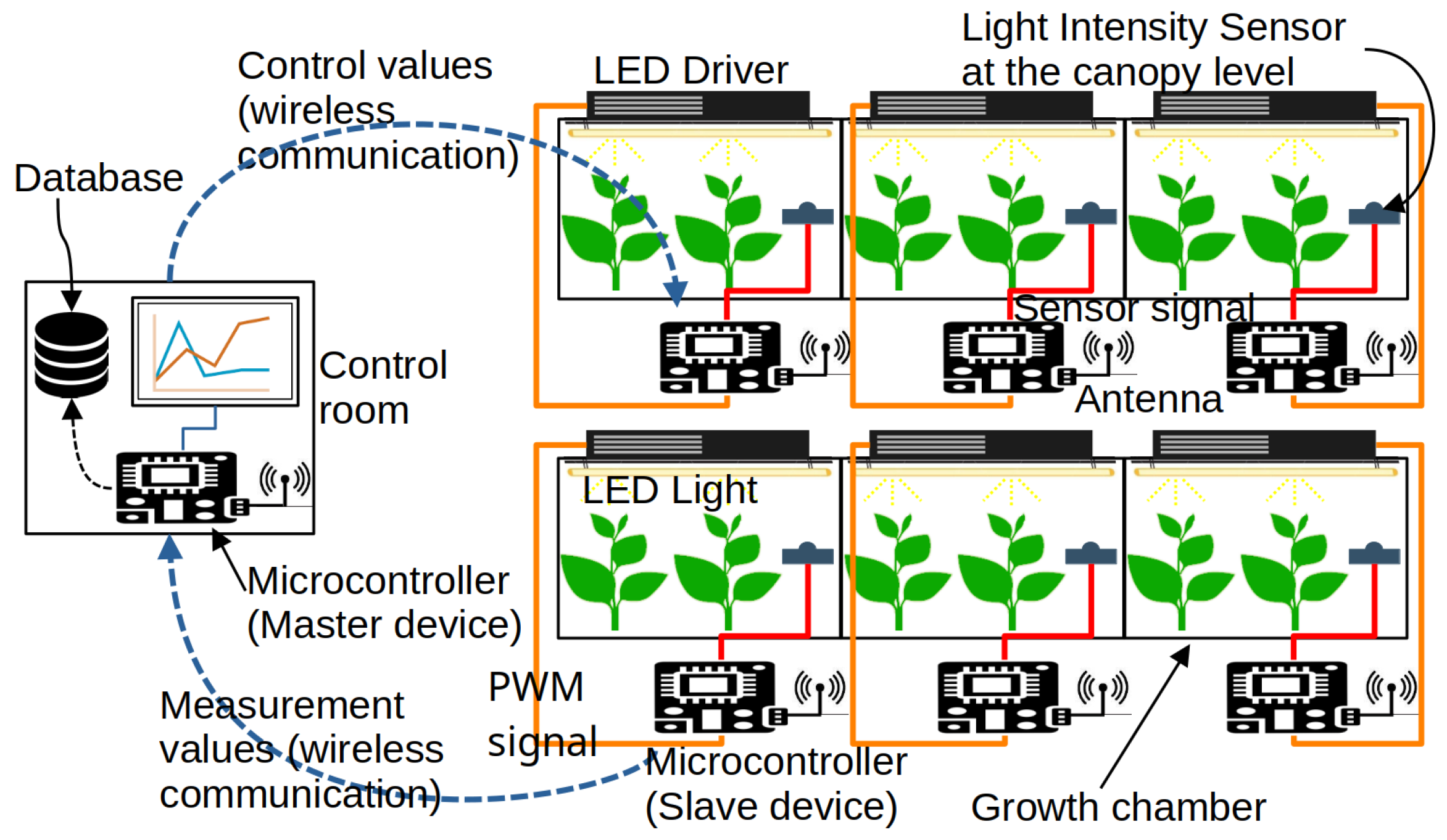
4. Grow Lights Monitoring System
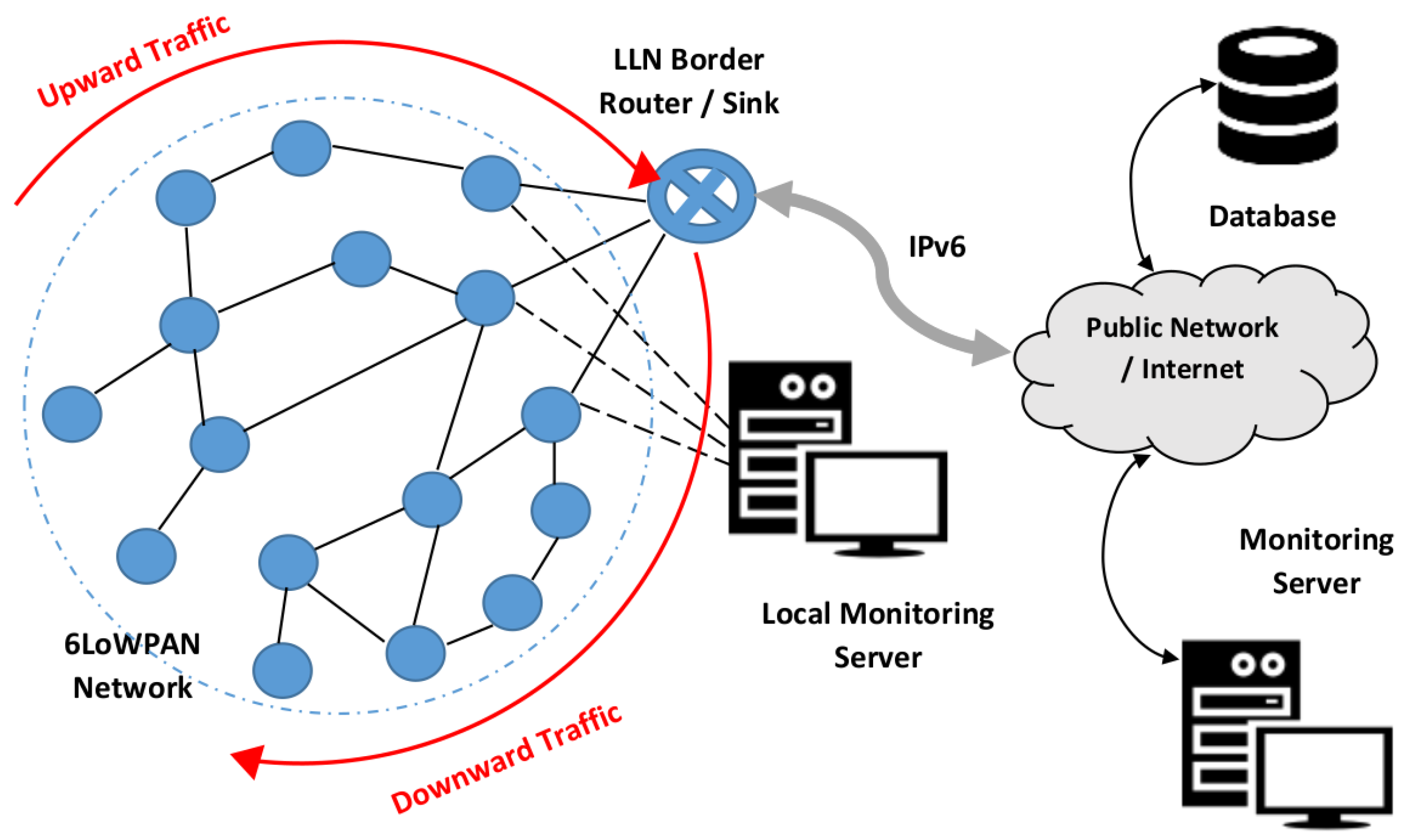
4.1. The Network
4.2. RPL Routing Protocol
4.3. Light Control
4.3.1. LED Dimming
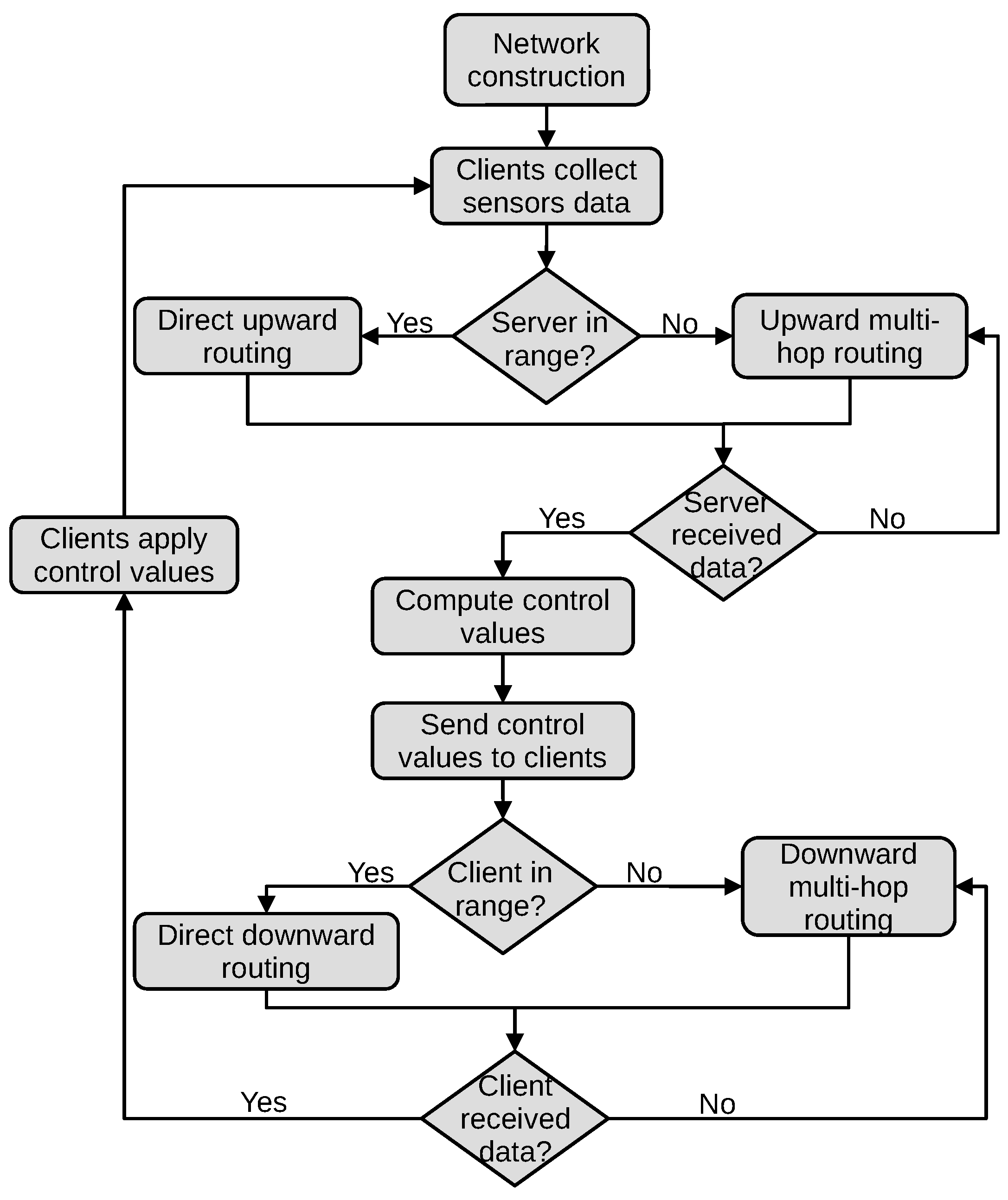
4.3.2. Distributed LED Brightness Control
| Algorithm 1 Distributed LED brightness control algorithm |
|
5. Results and Discussion
5.1. Simulation Setup
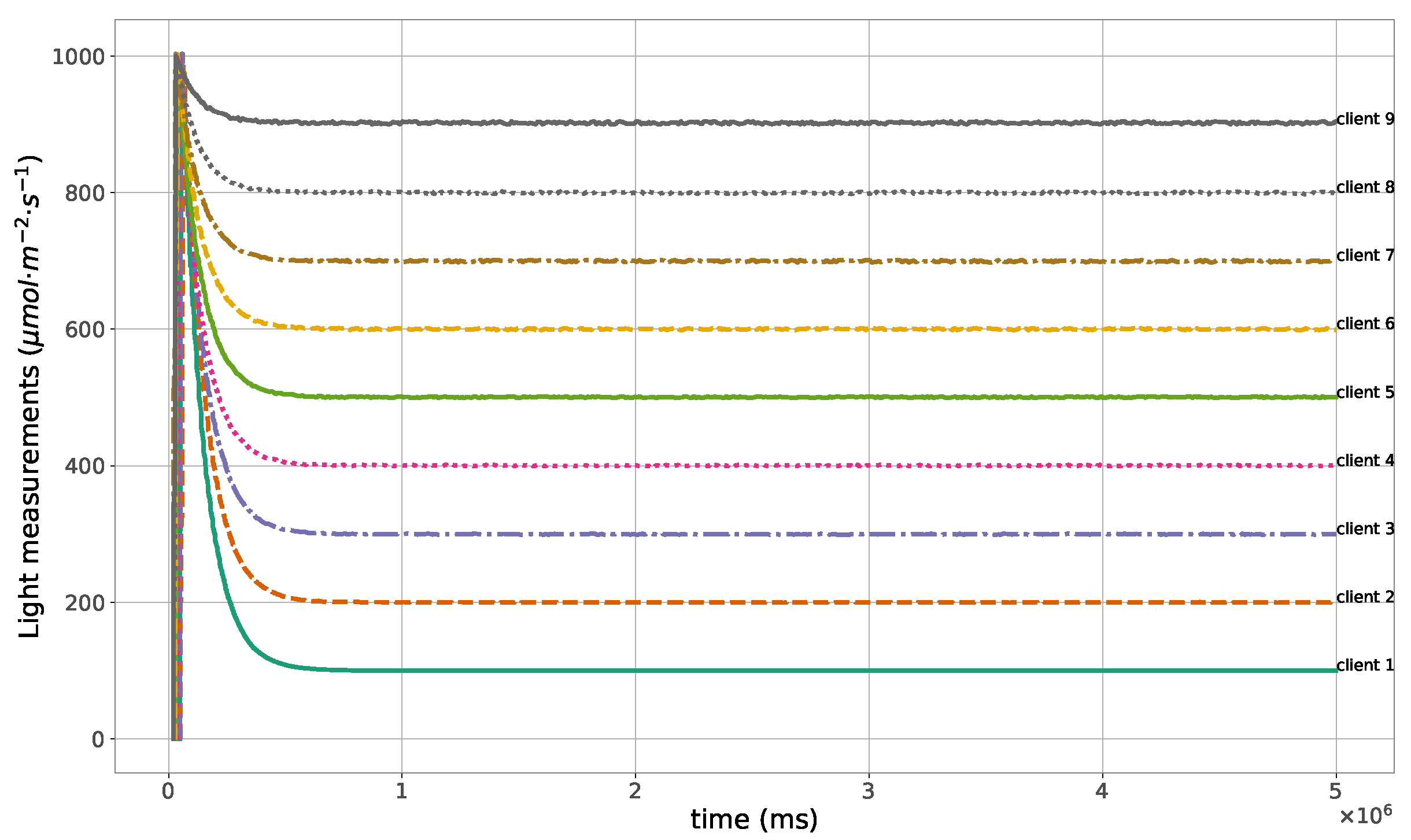
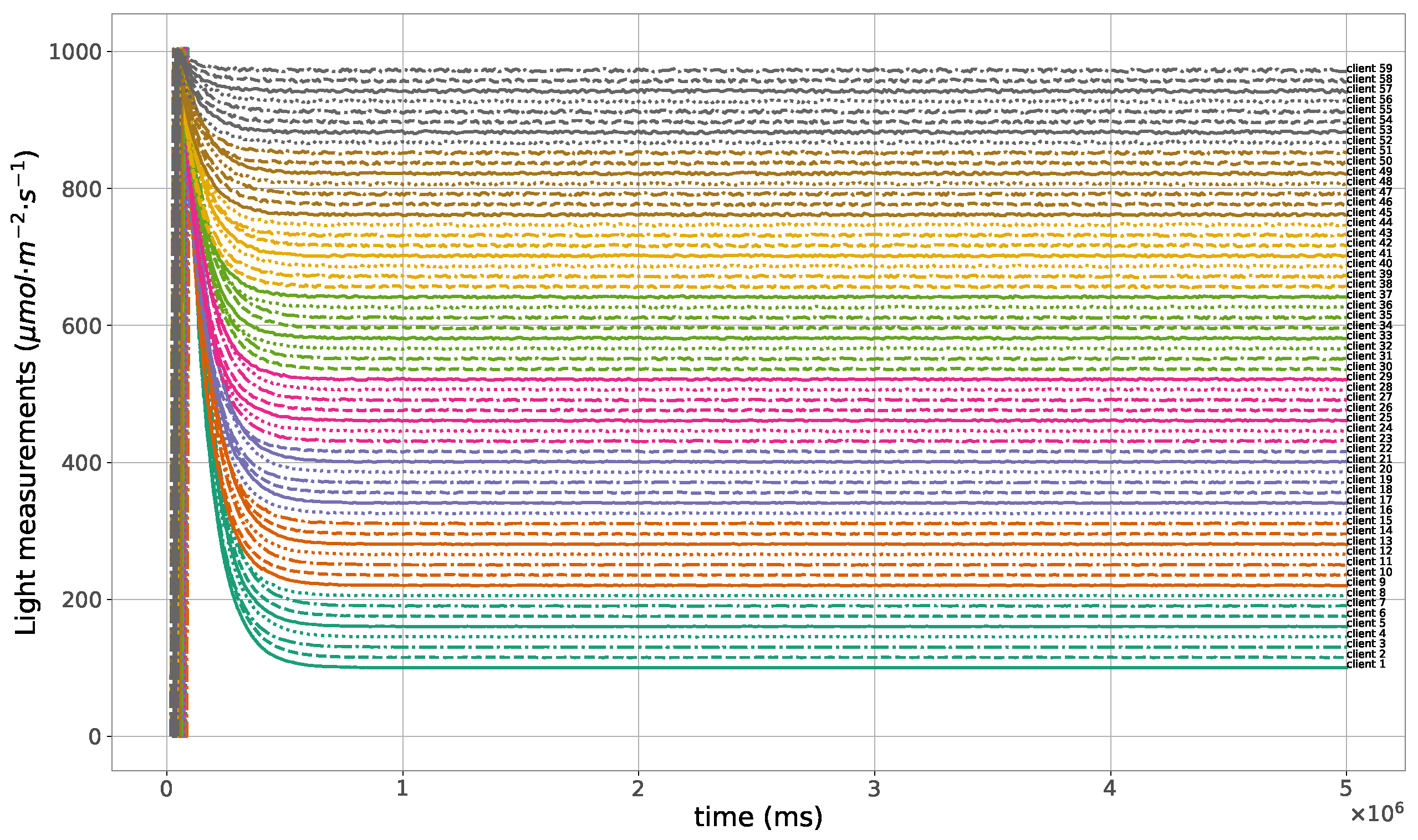
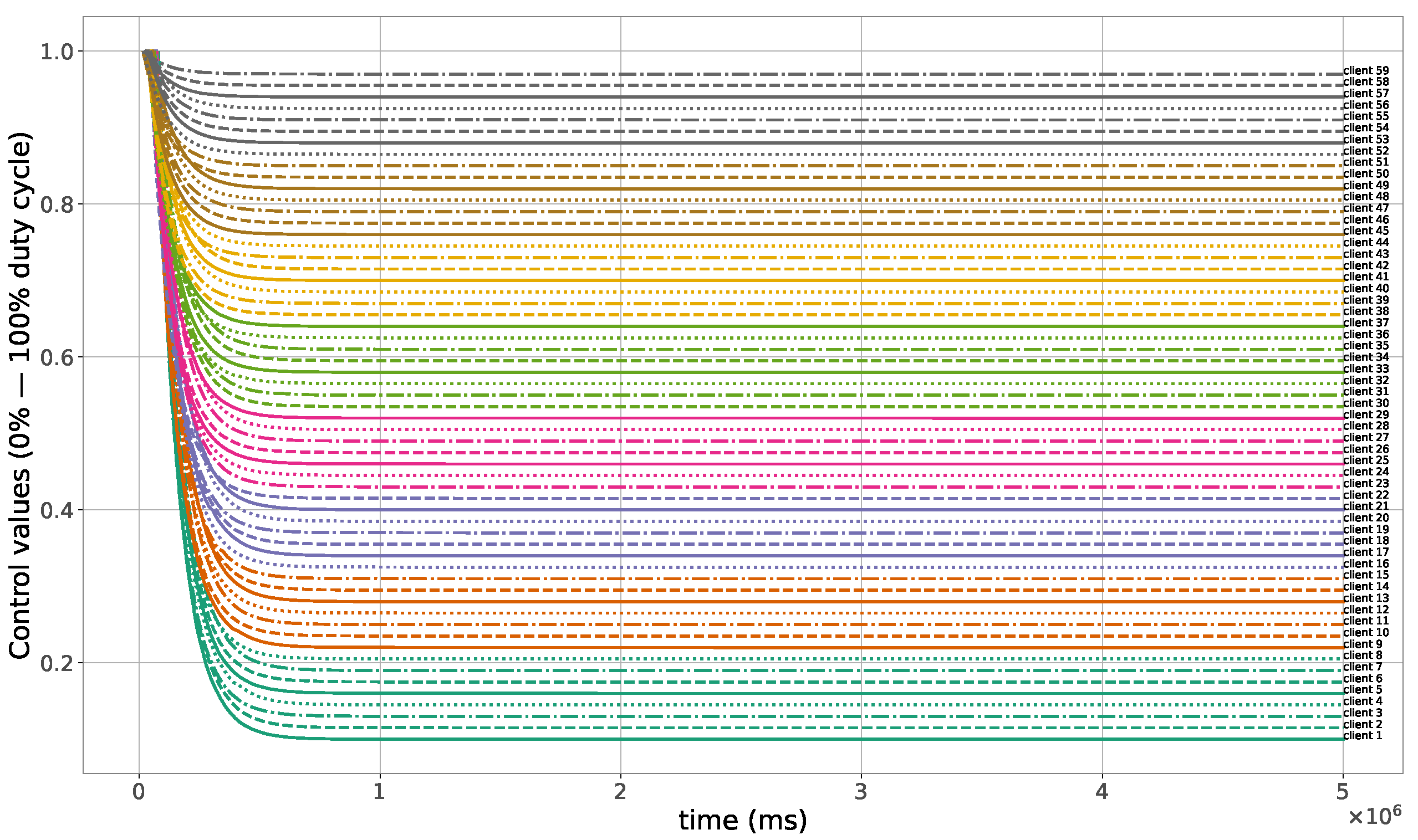
5.2. Distributed Remote Control Results
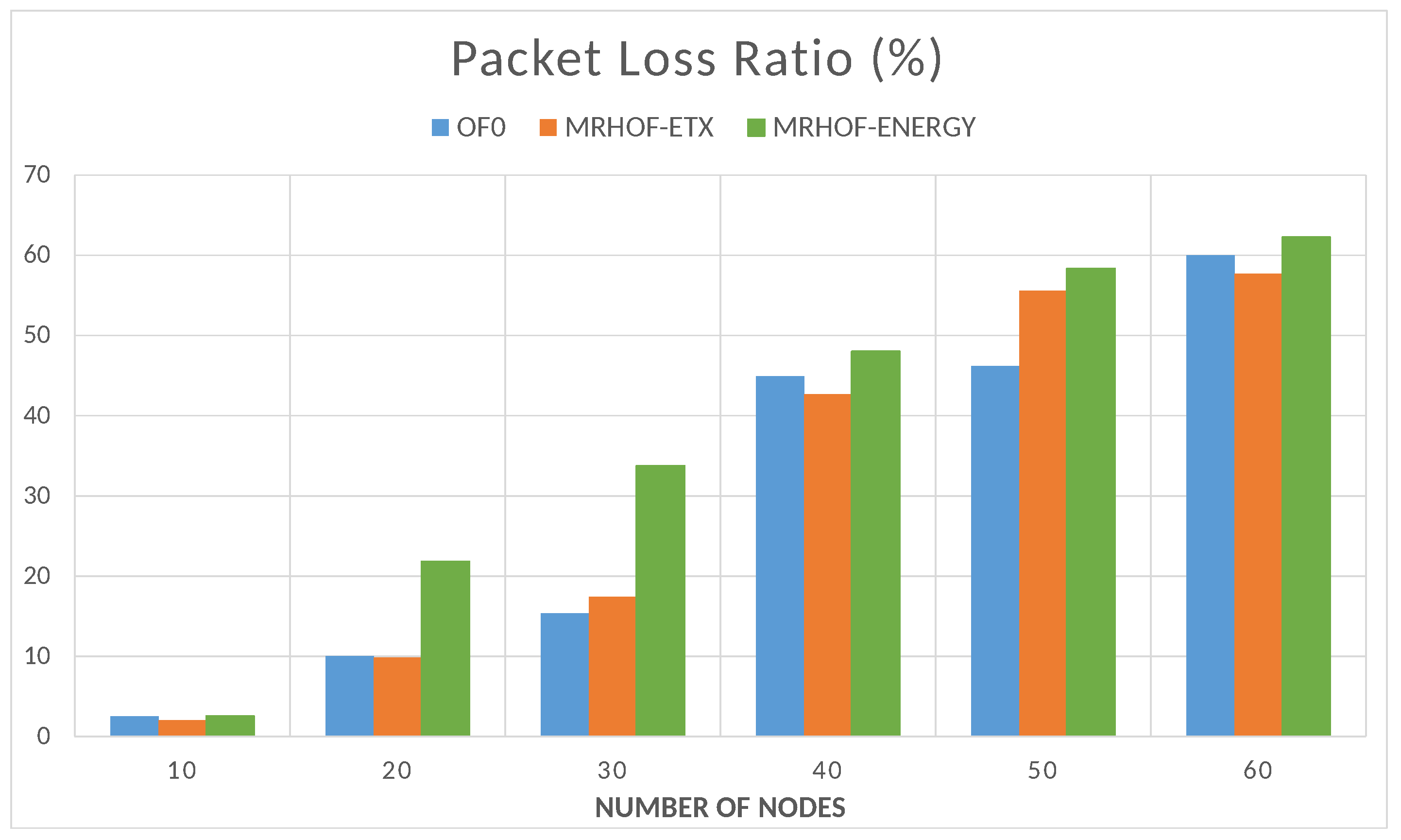
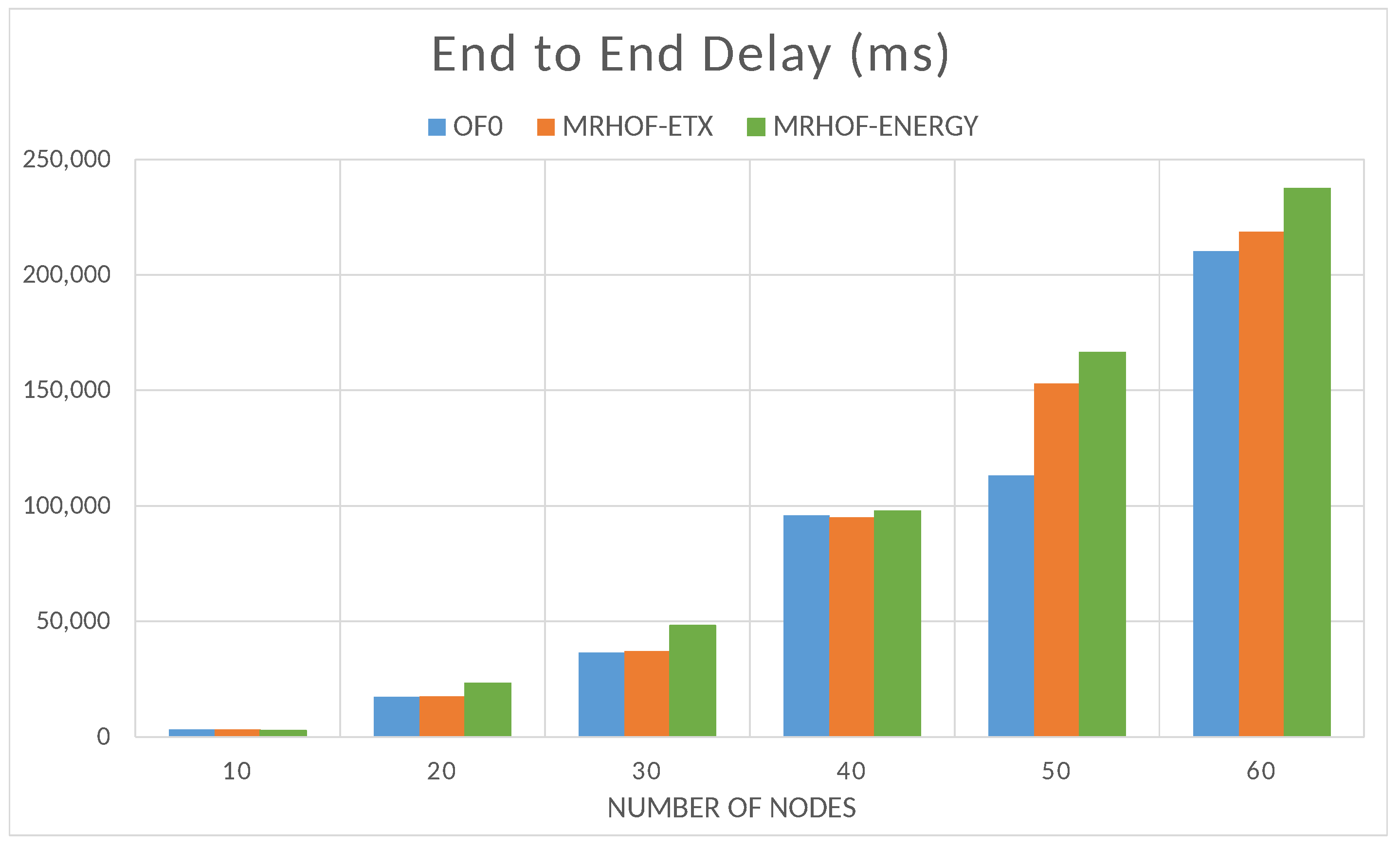
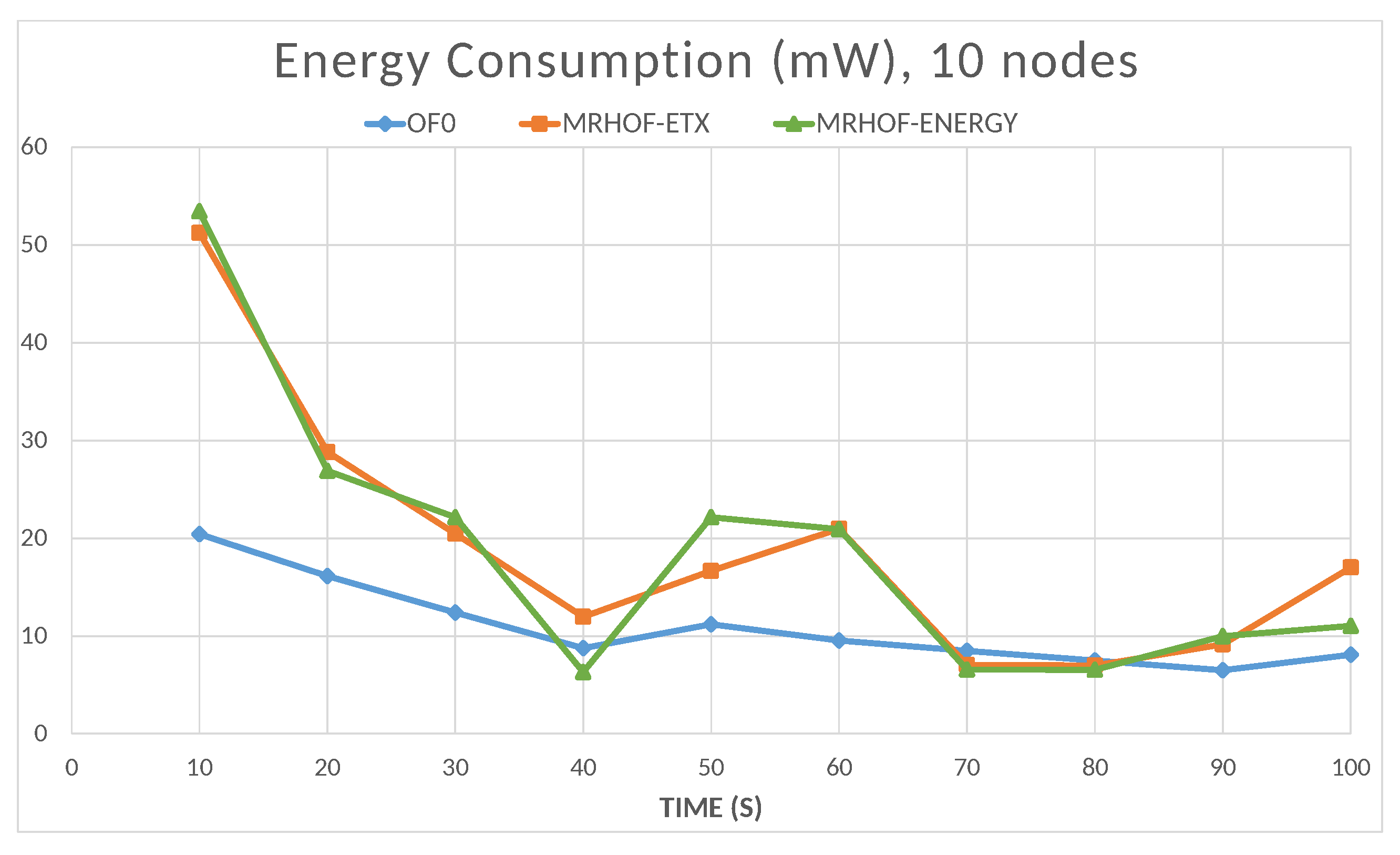
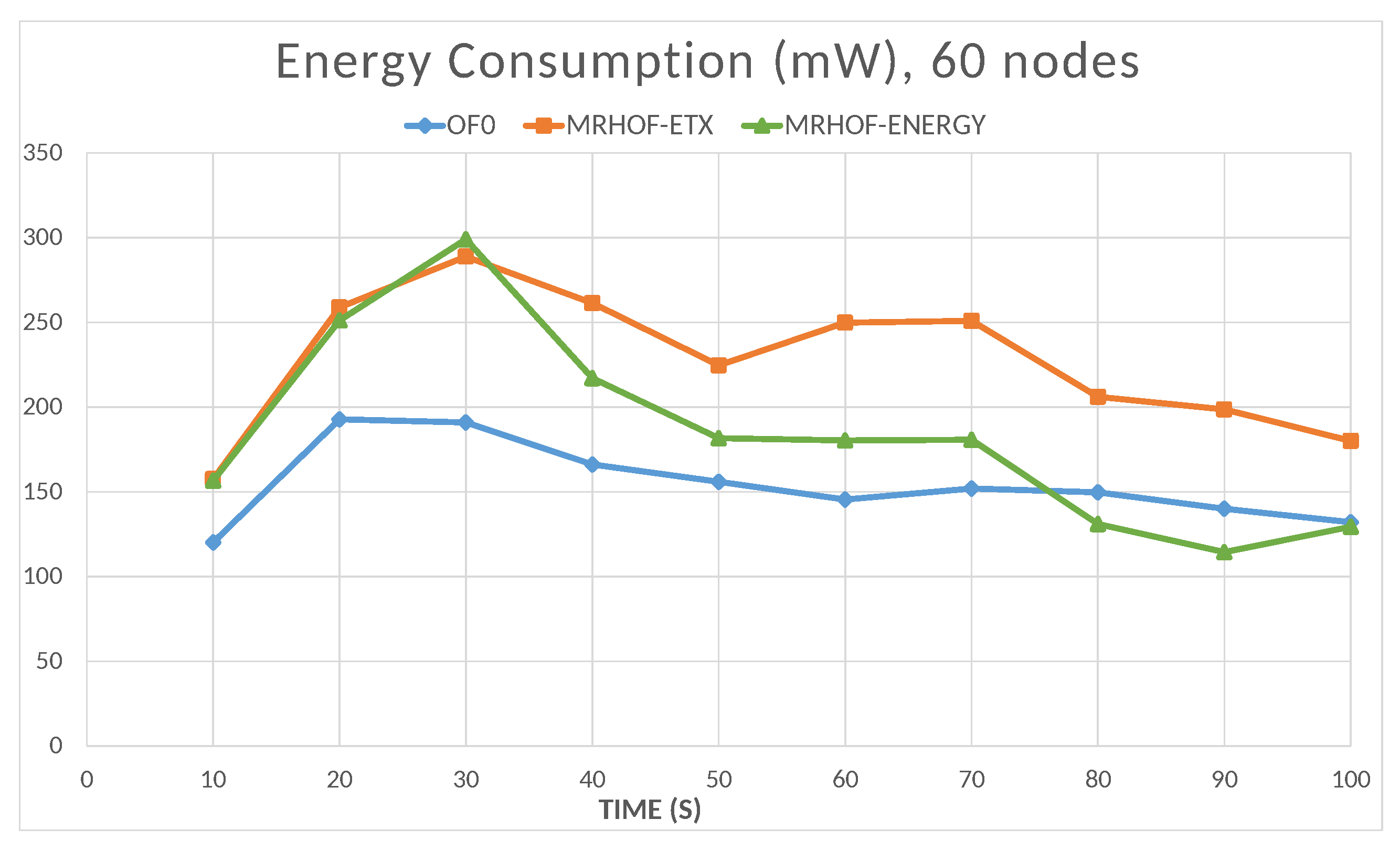
5.3. Network Performance Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IoT | Internet of things |
| AI | Artificial intelligence |
| LEDs | Lighting-emitting diodes |
| PAR | Photosynthetically active radiation |
| UV | Ultraviolet |
| IPv6 | Internet protocol version 6 |
| 6LoWPAN | IPv6 over low-power wireless personal area networks |
| RPL | Routing protocol for low-power and lossy networks |
| PWM | Pulse width modulation |
| AM | Amplitude modulation |
| PI | Proportional integral |
| PFD | Photon flux density |
| WSN | Wireless sensor network |
| OF | Objective function |
| OF0 | Objective function 0 |
| MRHOF-ETX | Minimum rank with hysteresis objective function-expected transmission count |
| MRHOF-energy | Minimum rank with hysteresis objective function-energy |
| PLR | Packets loss ratio |
References
- FAO. The State of Food and Agriculture 2022. Leveraging Automation in Agriculture for Transforming Agrifood Systems; FAO: Rome, Italy, 2022. [Google Scholar]
- Abbasi, R.; Martinez, P.; Ahmad, R. The digitization of agricultural industry—A systematic literature review on agriculture 4.0. Smart Agric. Technol. 2022, 2, 100042. [Google Scholar] [CrossRef]
- Akhter, R.; Sofi, S.A. Precision agriculture using IoT data analytics and machine learning. J. King Saud-Univ.-Comput. Inf. Sci. 2022, 34, 5602–5618. [Google Scholar] [CrossRef]
- Khanna, A.; Kaur, S. Evolution of internet of things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 2019, 157, 218–231. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Abdollahi, A.; Al-Turjman, F.; Treiblmaier, H. The Interplay between the internet of things and agriculture: A bibliometric analysis and research agenda. Internet Things 2022, 100580. [Google Scholar] [CrossRef]
- Tao, W.; Zhao, L.; Wang, G.; Liang, R. Review of the internet of things communication technologies in smart agriculture and challenges. Comput. Electron. Agric. 2021, 189, 106352. [Google Scholar] [CrossRef]
- Wu, X.; Aravecchia, S.; Lottes, P.; Stachniss, C.; Pradalier, C. Robotic weed control using automated weed and crop classification. J. Field Robot. 2020, 37, 322–340. [Google Scholar] [CrossRef]
- Singh, G.; Yogi, K.K. Internet of things-based devices/robots in Agriculture 4.0. In Sustainable Communication Networks and Application: Proceedings of ICSCN 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 87–102. [Google Scholar]
- Shaikh, T.A.; Rasool, T.; Lone, F.R. Towards leveraging the role of machine learning and artificial intelligence in precision agriculture and smart farming. Comput. Electron. Agric. 2022, 198, 107119. [Google Scholar] [CrossRef]
- Onishi, Y.; Yoshida, T.; Kurita, H.; Fukao, T.; Arihara, H.; Iwai, A. An automated fruit harvesting robot by using deep learning. Robomech J. 2019, 6, 1–8. [Google Scholar] [CrossRef]
- Torky, M.; Hassanein, A.E. Integrating blockchain and the internet of things in precision agriculture: Analysis, opportunities, and challenges. Comput. Electron. Agric. 2020, 178, 105476. [Google Scholar] [CrossRef]
- Singh, A.; Jones, S.; Ganapathysubramanian, B.; Sarkar, S.; Mueller, D.; Sandhu, K.; Nagasubramanian, K. Challenges and opportunities in machine-augmented plant stress phenotyping. Trends Plant Sci. 2021, 26, 53–69. [Google Scholar] [CrossRef]
- Tao, H.; Xu, S.; Tian, Y.; Li, Z.; Ge, Y.; Zhang, J.; Wang, Y.; Zhou, G.; Deng, X.; Zhang, Z.; et al. Proximal and remote sensing in plant phenomics: Twenty years of progress, challenges and perspectives. Plant Commun. 2022, 3, 100344. [Google Scholar] [CrossRef]
- Khanal, S.; Kc, K.; Fulton, J.P.; Shearer, S.; Ozkan, E. Remote sensing in agriculture—Accomplishments, limitations, and opportunities. Remote Sens. 2020, 12, 3783. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Dang, L.M.; Sadeghi-Niaraki, A.; Moon, H. Crop pest recognition in natural scenes using convolutional neural networks. Comput. Electron. Agric. 2020, 169, 105174. [Google Scholar] [CrossRef]
- Pena, D.; Dehaghani, P.; Abdelkader, O.; Bouzebiba, H.; Aguiar, A. A Low-Cost Process for Plant Motion Magnification for Smart Indoor Farming. In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications—Volume 4: VISAPP, INSTICC, Lisbon, Portugal, 19–21 February 2023; SciTePress: Vienna, Austria, 2023; pp. 378–384. [Google Scholar] [CrossRef]
- Van Gerrewey, T.; Boon, N.; Geelen, D. Vertical farming: The only way is up? Agronomy 2022, 12, 2. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Kotilainen, T.; Carmona-García, G.; Leip, A.; Tuomisto, H.L. Vertical farming: A trade-off between land area need for crops and for renewable energy production. J. Clean. Prod. 2022, 379, 134507. [Google Scholar] [CrossRef]
- Zhai, Z.; Martínez, J.F.; Beltran, V.; Martínez, N.L. Decision support systems for agriculture 4.0: Survey and challenges. Comput. Electron. Agric. 2020, 170, 105256. [Google Scholar] [CrossRef]
- Xu, J.; Gu, B.; Tian, G. Review of agricultural IoT technology. Artif. Intell. Agric. 2022, 6, 10–22. [Google Scholar] [CrossRef]
- Thilakarathne, N.N.; Yassin, H.; Bakar, M.S.A.; Abas, P.E. Internet of things in Smart Agriculture: Challenges, Opportunities and Future Directions. In Proceedings of the 2021 IEEE Asia-Pacific Conference on Computer Science and Data Engineering (CSDE), Brisbane, Australia, 8–10 December 2021; pp. 1–9. [Google Scholar]
- Wang, D.; Cao, W.; Zhang, F.; Li, Z.; Xu, S.; Wu, X. A review of deep learning in multiscale agricultural sensing. Remote. Sens. 2022, 14, 559. [Google Scholar] [CrossRef]
- Noon, S.K.; Amjad, M.; Qureshi, M.A.; Mannan, A. Use of deep learning techniques for identification of plant leaf stresses: A review. Sustain. Comput. Inform. Syst. 2020, 28, 100443. [Google Scholar] [CrossRef]
- Sowjanya, K.D.; Sindhu, R.; Parijatham, M.; Srikanth, K.; Bhargav, P. Multipurpose autonomous agricultural robot. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 2, pp. 696–699. [Google Scholar]
- Ang, M.C.Y.; Lew, T.T.S. Non-Destructive Technologies for Plant Health Diagnosis. Front. Plant Sci. 2022, 13, 1637. [Google Scholar] [CrossRef]
- Bukhamsin, A.; Lahcen, A.A.; De Oliveira Filho, J.; Shetty, S.; Blilou, I.; Kosel, J.; Salama, K.N. Minimally-invasive, real-time, non-destructive, species-independent phytohormone biosensor for precision farming. Biosens. Bioelectron. 2022, 214, 114515. [Google Scholar] [CrossRef] [PubMed]
- Artés-Hernández, F.; Castillejo, N.; Martínez-Zamora, L. UV and visible spectrum led lighting as abiotic elicitors of bioactive compounds in sprouts, microgreens, and baby leaves-A comprehensive review including their mode of action. Foods 2022, 11, 265. [Google Scholar] [CrossRef] [PubMed]
- Kozai, T. Towards sustainable plant factories with artificial lighting (PFALs) for achieving SDGs. Int. J. Agric. Biol. Eng. 2019, 12, 28–37. [Google Scholar] [CrossRef]
- Dsouza, A.; Newman, L.; Graham, T.; Fraser, E.D. Exploring the landscape of controlled environment agriculture research: A systematic scoping review of trends and topics. Agric. Syst. 2023, 209, 103673. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Enhancing smart farming through the applications of Agriculture 4.0 technologies. Int. J. Intell. Netw. 2022, 3, 150–164. [Google Scholar] [CrossRef]
- SharathKumar, M.; Heuvelink, E.; Marcelis, L.F. Vertical farming: Moving from genetic to environmental modification. Trends Plant Sci. 2020, 25, 724–727. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Iddio, E. Energy performance evaluation and modeling for an indoor farming facility. Sustain. Energy Technol. Assessments 2022, 52, 102240. [Google Scholar] [CrossRef]
- Weidner, T.; Yang, A.; Forster, F.; Hamm, M.W. Regional conditions shape the food–energy–land nexus of low-carbon indoor farming. Nat. Food 2022, 3, 206–216. [Google Scholar] [CrossRef]
- Weidner, T.; Yang, A.; Hamm, M.W. Energy optimisation of plant factories and greenhouses for different climatic conditions. Energy Convers. Manag. 2021, 243, 114336. [Google Scholar] [CrossRef]
- Avgoustaki, D.D.; Xydis, G. How energy innovation in indoor vertical farming can improve food security, sustainability, and food safety? In Advances in Food Security and Sustainability; Elsevier: Amsterdam, The Netherlands, 2020; Volume 5, pp. 1–51. [Google Scholar]
- Glaroudis, D.; Iossifides, A.; Chatzimisios, P. Survey, comparison and research challenges of IoT application protocols for smart farming. Comput. Netw. 2020, 168, 107037. [Google Scholar] [CrossRef]
- Farooq, M.S.; Riaz, S.; Abid, A.; Abid, K.; Naeem, M.A. A Survey on the Role of IoT in Agriculture for the Implementation of Smart Farming. IEEE Access 2019, 7, 156237–156271. [Google Scholar] [CrossRef]
- Li, J.; He, H. Design of rice intelligent water-saving irrigation system based on agricultural internet of things. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1176, p. 052068. [Google Scholar]
- Lavanya, G.; Rani, C.; GaneshKumar, P. An automated low cost IoT based Fertilizer Intimation System for smart agriculture. Sustain. Comput. Inform. Syst. 2020, 28, 100300. [Google Scholar]
- Cai, W.; Wen, X.; Tu, Q. Designing an intelligent greenhouse monitoring system based on the internet of things. Appl. Ecol. Environ. Res. 2019, 17, 8449–8464. [Google Scholar] [CrossRef]
- Kaur, G.; Upadhyaya, P.; Chawla, P. Comparative analysis of IoT-based controlled environment and uncontrolled environment plant growth monitoring system for hydroponic indoor vertical farm. Environ. Res. 2023, 222, 115313. [Google Scholar] [CrossRef]
- Naresh, M.; Munaswamy, P. Smart agriculture system using IoT technology. Int. J. Recent Technol. Eng. 2019, 7, 98–102. [Google Scholar]
- Nóbrega, L.; Gonçalves, P.; Pedreiras, P.; Pereira, J. An IoT-based solution for intelligent farming. Sensors 2019, 19, 603. [Google Scholar] [CrossRef] [PubMed]
- Namgyel, T.; Siyang, S.; Khunarak, C.; Pobkrut, T.; Norbu, J.; Chaiyasit, T.; Kerdcharoen, T. IoT based hydroponic system with supplementary LED light for smart home farming of lettuce. In Proceedings of the 2018 15th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Rai, Thailand, 18–21 July 2018; pp. 221–224. [Google Scholar]
- Channumsin, O.; Trancharoen, J.; Sonchaiyaphum, S.; Pimpol, J.; Tangsrirat, W. Automatic Monitoring and Controlling System for Hydroponics Greenhouse Environments Through Smartphone Application. In Proceedings of the 2022 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Penang, Malaysia, 22–25 November 2022; pp. 1–4. [Google Scholar]
- Nguyen, H.C.; Thi, B.T.V.; Ngo, Q.H. Automatic Monitoring System for Hydroponic Farming: IoT-Based Design and Development. Asian J. Agric. Rural. Dev. 2022, 12, 210–219. [Google Scholar] [CrossRef]
- Nalendra, A.K.; Wahvudi, D.; Mujiono, M.; Fu’ad, M.N. IoT-Agri: IoT-based Environment Control and Monitoring System for Agriculture. In Proceedings of the 2022 Seventh International Conference on Informatics and Computing (ICIC), Denpasar, Indonesia, 8–9 December 2022; pp. 1–6. [Google Scholar]
- Ben-Daya, M.; Hassini, E.; Bahroun, Z.; Banimfreg, B.H. The role of internet of things in food supply chain quality management: A review. Qual. Manag. J. 2020, 28, 17–40. [Google Scholar] [CrossRef]
- Majumdar, P.; Bhattacharya, D.; Mitra, S. Data Aggregation Methods for IoT Routing Protocols: A Review Focusing on Energy Optimization in Precision Agriculture. ECTI Trans. Electr. Eng. Electron. Commun. 2022, 20, 339–357. [Google Scholar] [CrossRef]
- Kim, Y.; Bae, P.; Han, J.; Ko, Y.B. Data aggregation in precision agriculture for low-power and lossy networks. In Proceedings of the 2015 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 24–26 August 2015; pp. 438–443. [Google Scholar]
- Homaei, M.H.; Salwana, E.; Shamshirband, S. An enhanced distributed data aggregation method in the Internet of Things. Sensors 2019, 19, 3173. [Google Scholar] [CrossRef]
- Chen, Y.; Chanet, J.P.; Hou, K.M. RPL Routing Protocol a case study: Precision agriculture. In Proceedings of the First China-France Workshop on Future Computing Technology (CF-WoFUCT 2012), Harbin, China, 16–17 February 2012; pp. 6–9. [Google Scholar]
- Chen, Y.; Chanet, J.P.; Hou, K.M.; Shi, H.; De Sousa, G. A scalable context-aware objective function (SCAOF) of routing protocol for agricultural low-power and lossy networks (RPAL). Sensors 2015, 15, 19507–19540. [Google Scholar] [CrossRef] [PubMed]
- Alilou, M.; Sangar, A.B.; Majidzadeh, K.; Masdari, M. QFS-RPL: RPL Based Energy and Mobility Aware Multi Path Routing Protocol for the Internet of Mobile Things Data Transfer Infrastructures. Res. Sq. 2023. preprint. [Google Scholar]
- Sankar, S.; Srinivasan, P.; Luhach, A.K.; Somula, R.; Chilamkurti, N. Energy-aware grid-based data aggregation scheme in routing protocol for agricultural internet of things. Sustain. Comput. Inform. Syst. 2020, 28, 100422. [Google Scholar] [CrossRef]
- Zareie, M.; Poorali, B.; Nowicki, E.; Pahlevani, M. An improved digital control system for LED grow lights used in indoor farming. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 2032–2035. [Google Scholar]
- Karuniawati, S.; Putrada, A.G.; Rakhmatsyah, A. Optimization of grow lights control in iot-based aeroponic systems with sensor fusion and random forest classification. In Proceedings of the 2021 International Symposium on Electronics and Smart Devices (ISESD), Online, 29–30 June 2021; pp. 1–6. [Google Scholar]
- Limprasitwong, P.; Thongchaisuratkrul, C. Plant growth using automatic control system under LED, grow, and natural light. In Proceedings of the 2018 5th International Conference on Advanced Informatics: Concept Theory and Applications (ICAICTA), Krabi, Thailand, 14–17 August 2018; pp. 192–195. [Google Scholar]
- Ong, Z.J.; Ng, A.K.; Kyaw, T.Y. Intelligent outdoor aquaponics with automated grow lights and internet of things. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1778–1783. [Google Scholar]
- Samani, R.; Zareie, M.; Shekari, D.; Wrubleski, L.; Pahlevani, M. A hybrid digital control system for LED grow lights. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 25–29 February 2019; pp. 746–749. [Google Scholar]
- Harun, A.N.; Ani, N.N.; Ahmad, R.; Azmi, N.S. Red and blue LED with pulse lighting control treatment for Brassica chinensis in Indoor farming. In Proceedings of the 2013 IEEE Conference on Open Systems (ICOS), Kuching, Malaysia, 2–4 December 2013; pp. 231–236. [Google Scholar]
- Tarakanov, I.G.; Tovstyko, D.A.; Lomakin, M.P.; Shmakov, A.S.; Sleptsov, N.N.; Shmarev, A.N.; Litvinskiy, V.A.; Ivlev, A.A. Effects of light spectral quality on photosynthetic activity, biomass production, and carbon isotope fractionation in lettuce, Lactuca sativa L., plants. Plants 2022, 11, 441. [Google Scholar] [CrossRef] [PubMed]
- Kong, Y.; Nemali, K. Blue and far-red light affect area and number of individual leaves to influence vegetative growth and pigment synthesis in lettuce. Front. Plant Sci. 2021, 12, 667407. [Google Scholar] [CrossRef] [PubMed]
- Escobar-Bravo, R.; Klinkhamer, P.G.; Leiss, K.A. Interactive effects of UV-B light with abiotic factors on plant growth and chemistry, and their consequences for defense against arthropod herbivores. Front. Plant Sci. 2017, 8, 278. [Google Scholar] [CrossRef] [PubMed]
- Winter, T.; Thubert, P.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.P.; Alexander, R. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks; Internet Engineering Task Force (IETF): Fremont, CA, USA, 2012. [Google Scholar]
- Olvera-Gonzalez, E.; Escalante-Garcia, N.; Myers, D.; Ampim, P.; Obeng, E.; Alaniz-Lumbreras, D.; Castaño, V. Pulsed led-lighting as an alternative energy savings technique for vertical farms and plant factories. Energies 2021, 14, 1603. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, X.; Hou, Y.; Cheng, P.; Liang, Y.; Li, L. Full-range LED dimming driver with ultrahigh frequency PWM shunt dimming control. IEEE Access 2020, 8, 79695–79707. [Google Scholar] [CrossRef]
- Oikonomou, G.; Duquennoy, S.; Elsts, A.; Eriksson, J.; Tanaka, Y.; Tsiftes, N. The Contiki-NG open source operating system for next generation IoT devices. SoftwareX 2022, 18, 101089. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Operating system/simulator | Contiki-NG |
| MAC layer | IEEE |
| Network type/addressing scheme | 6LoWPAN/IPv6 |
| Transport | UDP |
| Radio medium model | Unit disk graph medium (UDGM): distance loss |
| Area | m2 |
| Number of nodes | |
| Simulation time | 5,000,000 ms |
| Objectives functions | OF0, MRHOF (ETX, Energy) |
| Transmit/receive ratio | TX = 100%, RX = 100% |
| Transmission range | 50 m |
| Interferance range | 100 m |
| Topology | Grid, multipoint-to-point; point-to-point |
| Nodes type | Zolertia Z1 |
| Packet sending rate (from clients) | 1 packet/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hadj Abdelkader, O.; Bouzebiba, H.; Pena, D.; Aguiar, A.P. Energy-Efficient IoT-Based Light Control System in Smart Indoor Agriculture. Sensors 2023, 23, 7670. https://doi.org/10.3390/s23187670
Hadj Abdelkader O, Bouzebiba H, Pena D, Aguiar AP. Energy-Efficient IoT-Based Light Control System in Smart Indoor Agriculture. Sensors. 2023; 23(18):7670. https://doi.org/10.3390/s23187670
Chicago/Turabian StyleHadj Abdelkader, Oussama, Hadjer Bouzebiba, Danilo Pena, and António Pedro Aguiar. 2023. "Energy-Efficient IoT-Based Light Control System in Smart Indoor Agriculture" Sensors 23, no. 18: 7670. https://doi.org/10.3390/s23187670
APA StyleHadj Abdelkader, O., Bouzebiba, H., Pena, D., & Aguiar, A. P. (2023). Energy-Efficient IoT-Based Light Control System in Smart Indoor Agriculture. Sensors, 23(18), 7670. https://doi.org/10.3390/s23187670