



Non-Standard Map Robot Path Planning Approach Based on Ant Colony Algorithms


Abstract
:1. Introduction
2. Problem Description
2.1. Realistic Issues
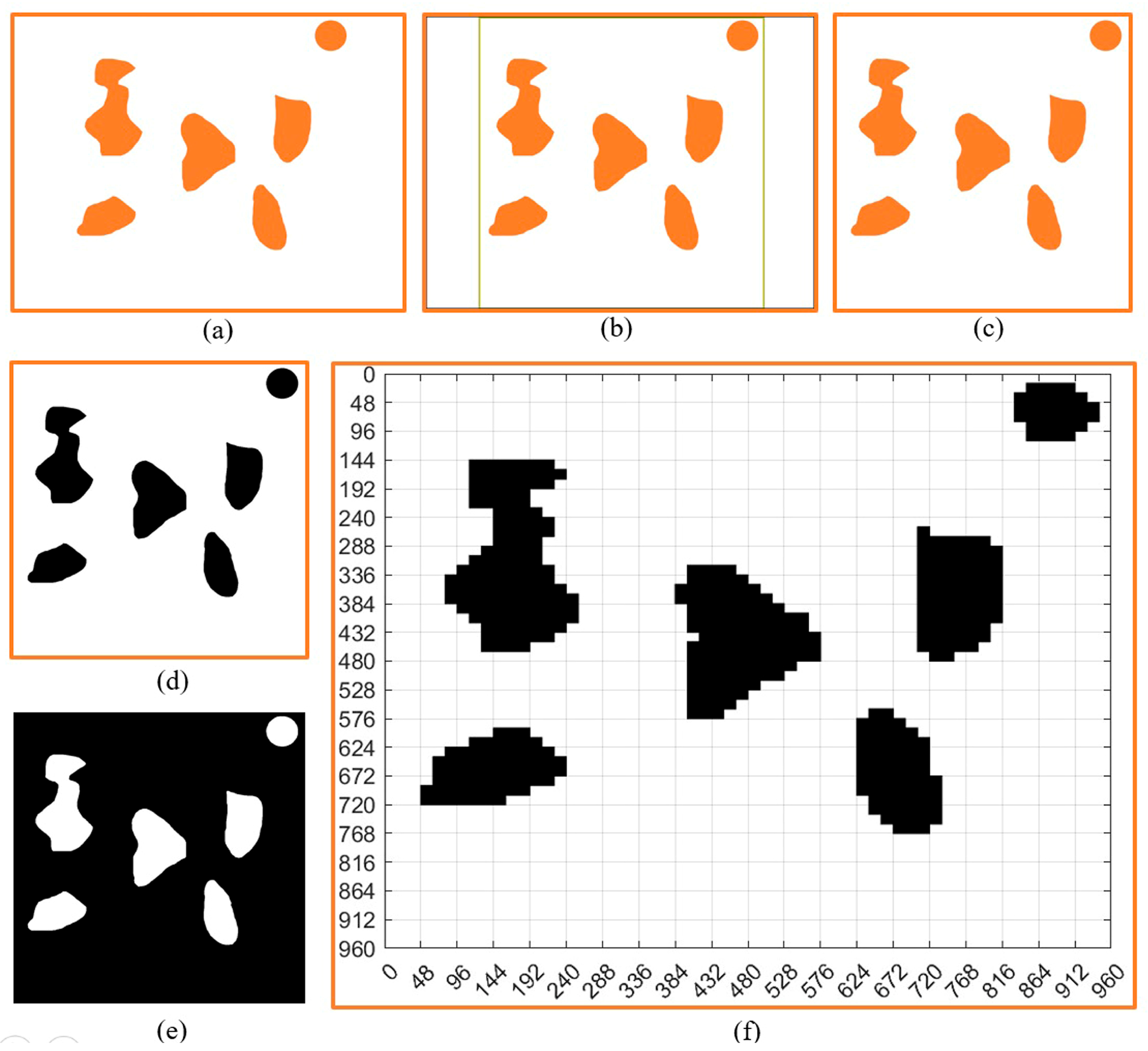
2.2. Processing of Non-Standard Maps
2.2.1. Image Processing
2.2.2. Obtaining Maps Adapted to Algorithms
2.2.3. Method of Image Processing
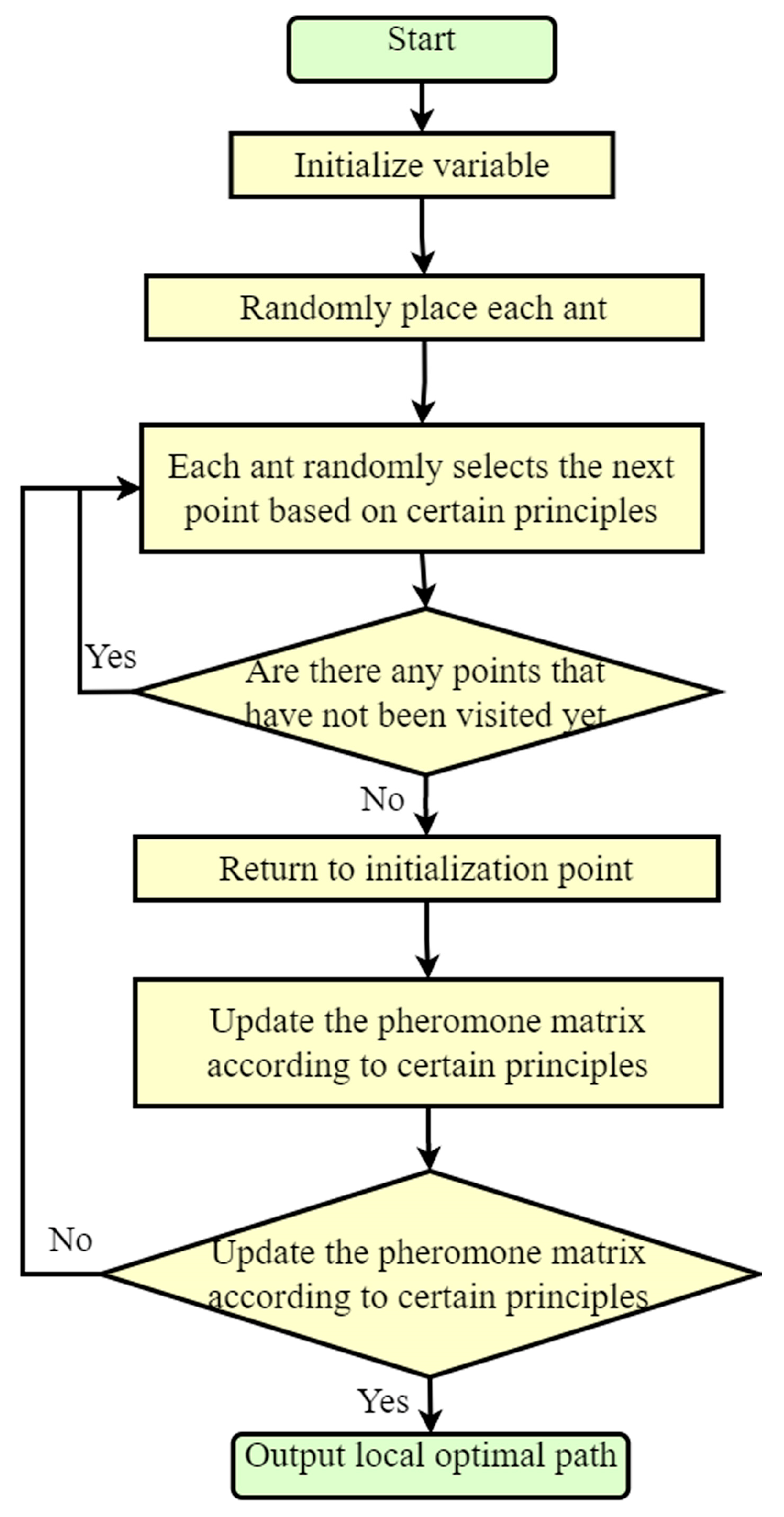
2.3. Introduction to Ant Algorithm
2.3.1. Basic Principles
2.3.2. Implementation
2.3.3. Post-Processing
2.3.4. Related Work
3. Methods
3.1. Non-Standard Map Processing
3.2. Determination of Obstacles in Non-Standard Environmental Maps
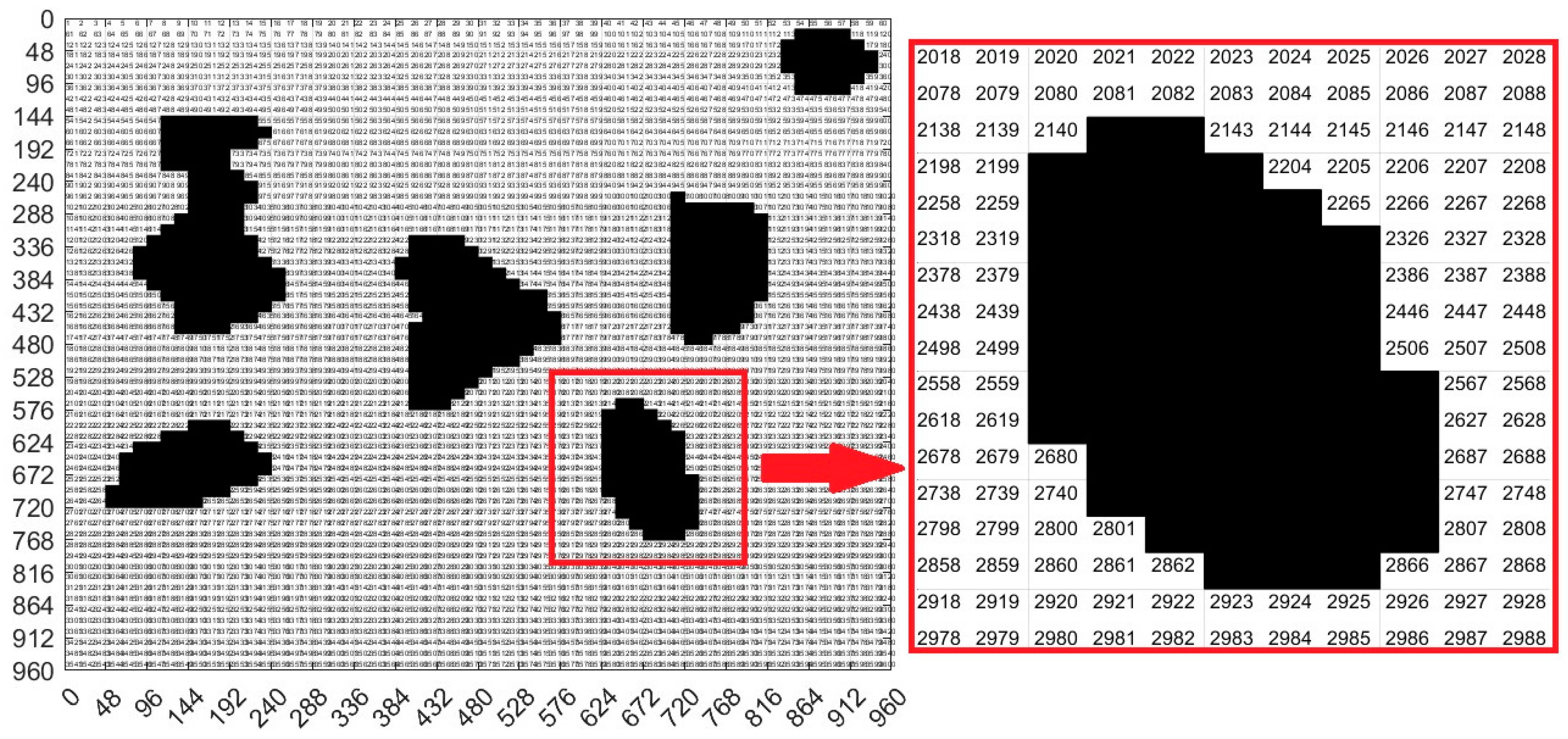
3.3. Grid Map Design
| Algorithm 1 Principle of location coding for non-standard environmental maps |
| Coding Principle |
| Input: Image edge length a, number of grids n × n Output: Grid edge length u = a/n 1. Loop n times starting from the first line 2. Loop n times starting from the first column 3. The encoding position y for each loop row is u × j, and j is the current number of columns 4. Each loop has a column encoding position x of u × i, where i represents the current number of rows 5. The encoded value for each position is num2str ((i − 1) × a/u + j 6. End column loop 7. End row loop 8. End |
3.4. Algorithm Design
3.5. Path and Pose Generation
3.6. Integration of Non-Standard Virtual Environment Maps and Path Planning
4. Experiment
4.1. Processing of Non-Standard Real Environment Map
4.2. Identification of Obstacles and Calibration Objects in Non-Standard Environmental Maps
4.3. Non-Standard Environment Map Generation
4.4. Implementation of Ant Colony Optimization Algorithms
4.4.1. Main Parameters
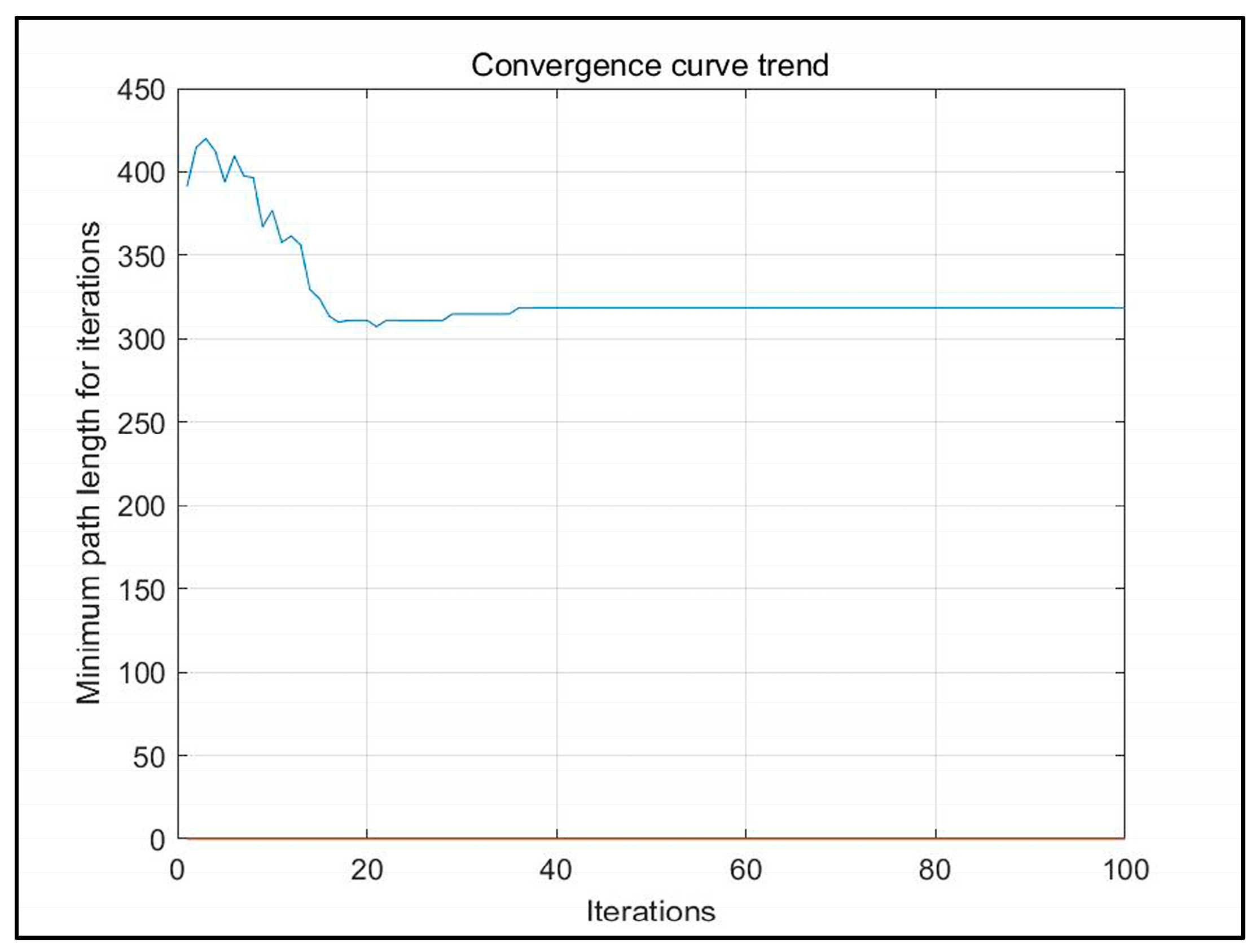
4.4.2. The Results and Analysis
4.5. Integration of Planning Path with Non-Standard Real Environment Map
4.6. The Impact of the Number of Iterations
4.7. Repeat Implementation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, Q.; Li, S.; Yang, J.; Bai, Q.; Hu, J.; Zhang, X.; Zhang, A. Intelligent Optimization Algorithm-Based Path Planning for a Mobile Robot. Comput. Intell. Neurosci. 2021, 2021, 8025730. [Google Scholar] [CrossRef]
- Deng, X.; Li, R.; Zhao, L.; Wang, K.; Gui, X. Multi-Obstacle Path Planning and Optimization for Mobile Robot, Expert Systems with Applications. Expert Syst. Appl. 2021, 183, 115445. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Zhou, W.; Yao, Q.; Nie, J.; Qi, X. Robot Path Planning Navigation for Dense Planting Red Jujube Orchards Based on the Joint Improved A* and DWA Algorithms under Laser SLAM. Agriculture 2022, 12, 1445. [Google Scholar] [CrossRef]
- Dong, L.; Yuan, X.; Yan, B.; Song, Y.; Xu, Q.; Yang, X. An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors 2022, 22, 6843. [Google Scholar] [CrossRef]
- Lin, D.; Shen, B.; Liu, Y.; Alsaadi, F.E.; Alsaedi, A. Genetic Algorithm-Based Compliant Robot Path Planning: An Improved Bi-RRT-Based Initialization Method. Assem. Autom. 2017, 37, 261–270. [Google Scholar] [CrossRef]
- Lu, L.; Han, J.; Dong, F.; Ding, Z.; Fan, C.; Chen, S.; Liu, H.; Wang, H. Joint-Smooth Toolpath Planning by Optimized Differential Vector for Robot Surface Machining Considering the Tool Orientation Constraints. IEEE/ASME Trans. Mechatron. 2022, 27, 2301–2311. [Google Scholar] [CrossRef]
- Chen, N.; Zhang, Y.; Cheng, W. Space Detumbling Robot Arm Deployment Path Planning Based on Bi-FMT* Algorithm. Micromachines 2021, 12, 1231. [Google Scholar] [CrossRef]
- Feng, K.; He, X.; Wang, M.; Chu, X.; Wang, D.; Yue, D. Path Optimization of Agricultural Robot Based on Immune Ant Colony: B-Spline Interpolation Algorithm. Math. Probl. Eng. 2022, 2022, 2585910. [Google Scholar] [CrossRef]
- Gong, L.; Yu, X.; Wang, J. Curve-Localizability-SVM Active Localization Research for Mobile Robots in Outdoor Environments. Appl. Sci. 2021, 11, 4362. [Google Scholar] [CrossRef]
- Schafle, T.R.; Uchiyama, N. Probabilistic Robust Path Planning for Nonholonomic Arbitrary-Shaped Mobile Robots Using a Hybrid A* Algorithm. IEEE Access 2021, 9, 93466–93479. [Google Scholar] [CrossRef]
- Liu, L.; Wang, B.; Xu, H. Research on Path-Planning Algorithm Integrating Optimization A-Star Algorithm and Artificial Potential Field Method. Electronics 2022, 11, 3660. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, C.; Liu, C. Collision-Free and Dynamically Feasible Trajectory Planning for Omnidirectional Mobile Robots Using a Novel B-Spline Based Rapidly Exploring Random Tree. Int. J. Adv. Robot. Syst. 2021, 18, 172988142110166. [Google Scholar] [CrossRef]
- Zhang, H.; Tao, Y.; Zhu, W. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-Star Algorithm. Sensors 2023, 23, 6647. [Google Scholar] [CrossRef]
- Zhang, D.; Yin, Y.; Luo, R.; Zou, S. Hybrid IACO-A*-PSO Optimization Algorithm for Solving Multiobjective Path Planning Problem of Mobile Robot in Radioactive Environment. Prog. Nucl. Energy 2023, 159, 104651. [Google Scholar] [CrossRef]
- Tian, Z.; Guo, C.; Liu, Y.; Chen, J. An Improved RRT Robot Autonomous Exploration and SLAM Construction Method. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 19–20 September 2020; pp. 612–619. Available online: https://ieeexplore.ieee.org/document/9230216/ (accessed on 1 July 2023).
- Zhang, L.; Shi, X.; Yi, Y.; Tang, L.; Peng, J.; Zou, J. Mobile Robot Path Planning Algorithm Based on RRT_Connect. Electronics 2023, 12, 2456. [Google Scholar] [CrossRef]
- Gao, Q.; Yuan, Q.; Sun, Y.; Xu, L. Path Planning Algorithm of Robot Arm Based on Improved RRT* and BP Neural Network Algorithm. J. King Saud Univ.—Comput. Inf. Sci. 2023, 35, 101650. [Google Scholar] [CrossRef]
- Tao, Y.; Wen, Y.; Gao, H.; Wang, T.; Wan, J.; Lan, J. A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm. Electronics 2022, 11, 1192. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, R.; Zhao, M.; Luan, S.; Bu, M. Robot Path Planning Based on Genetic Algorithm with Hybrid Initialization Method. J. Intell. Fuzzy Syst. 2022, 42, 2041–2056. [Google Scholar] [CrossRef]
- Salvetti, F.; Angarano, S.; Martini, M.; Cerrato, S.; Chiaberge, M. Waypoint Generation in Row-Based Crops with Deep Learning and Contrastive Clustering. In Machine Learning and Knowledge Discovery in Databases; Amini, M.-R., Canu, S., Fischer, A., Guns, T., Novak, P.K., Tsoumakas, G., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2023; Volume 13718, pp. 203–218. [Google Scholar] [CrossRef]
- Gong, F. Application of Artificial Intelligence Computer Intelligent Heuristic Search Algorithm. Adv. Multimed. 2022, 2022, 5178515. [Google Scholar] [CrossRef]
- Zhao, J.C.; Ye, M. An Optimization Method for Satellite Data Structure Design Based on Improved Ant Colony Algorithm. IEEE Access 2023, 11, 64941–64956. [Google Scholar] [CrossRef]
- Wu, S.; Li, Q.; Wei, W. Application of Ant Colony Optimization Algorithm Based on Triangle Inequality Principle and Partition Method Strategy in Robot Path Planning. Axioms 2023, 12, 525. [Google Scholar] [CrossRef]
- Cheng, J. Dynamic Path Optimization Based on Improved Ant Colony Algorithm. J. Adv. Transp. 2023, 2023, 7651100. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.; Fu, L.-H.; Pei, Y.-H.; Lan, C.-Y.; Hou, H.-Y.; Song, H. Three-Dimensional Continuous Picking Path Planning Based on Ant Colony Optimization Algorithm. PLoS ONE 2023, 18, e0282334. [Google Scholar] [CrossRef] [PubMed]
- Fei, T.; Wu, X.; Zhang, L.; Zhang, Y.; Chen, L. Research on improved ant colony optimization for traveling salesman problem. Math. Biosci. Eng. 2022, 19, 8152–8186. [Google Scholar] [CrossRef] [PubMed]
- Dai, X.; Wei, Y. Application of Improved Moth-Flame Optimization Algorithm for Robot Path Planning. IEEE Access 2021, 9, 105914–105925. [Google Scholar] [CrossRef]
- Wang, D.; Chen, S.; Zhang, Y.; Liu, L. Path Planning of Mobile Robot in Dynamic Environment: Fuzzy Artificial Potential Field and Extensible Neural Network. Artif Life Robot. 2021, 26, 129–139. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, Y.; Fan, J.; Huang, Y.; Zhong, Y. An Efficient Method for Optimizing Sensors’ Layout for Accurate Measurement of Underground Ventilation Networks. IEEE Access 2023, 11, 72630–72640. [Google Scholar] [CrossRef]
- Wang, X.; Ma, X.; Li, Z. Research on SLAM and Path Planning Method of Inspection Robot in Complex Scenarios. Electronics 2023, 12, 2178. [Google Scholar] [CrossRef]
- Maldonado-Valencia, R.I.; Rodriguez-Garavito, C.H.; Cruz-Perez, C.A.; Hernandez-Navas, J.S.; Zabala-Benavides, D.I. Planning and Visual-Servoing for Robotic Manipulators in ROS. Int. J. Intell. Robot. Appl. 2022, 6, 602–614. [Google Scholar] [CrossRef]
- Venkatesh, V.; Li, L.; McLinden, M.; Coon, M.; Heymsfield, G.M.; Tanelli, S.; Hovhannisyan, H. A Frequency Diversity Algorithm for Extending the Radar Doppler Velocity Nyquist Interval. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2462–2470. [Google Scholar] [CrossRef]
- Cui, S.; Wang, S.; Wang, R.; Zhang, S.; Zhang, C. Learning-Based Slip Detection for Dexterous Manipulation Using GelStereo Sensing. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–10. [Google Scholar] [CrossRef]
- Cao, Y.; Nor, N.M.; Samad, Z. An Assistant Algorithm Model for a Mobile Robot to Pass through a Concave Obstacle Area. SN Appl. Sci. 2023, 5, 219. [Google Scholar] [CrossRef]
- Abdulsaheb, J.A.; Kadhim, D.J. Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey. Robotics 2023, 12, 93. [Google Scholar] [CrossRef]
- Zhang, D.; Luo, R.; Yin, Y.; Zou, S. Multi-Objective Path Planning for Mobile Robot in Nuclear Accident Environment Based on Improved Ant Colony Optimization with Modified A*. Nucl. Eng. Technol. 2023, 55, 1838–1854. [Google Scholar] [CrossRef]
- Bosdelekidis, V.; Bryne, T.H.; Sokolova, N.; Johansen, T.A. Navigation Algorithm-Agnostic Integrity Monitoring Based on Solution Separation with Constrained Computation Time and Sensor Noise Overbounding. J. Intell. Robot. Syst. 2022, 106, 7. [Google Scholar] [CrossRef]
- Li, W.; Tan, M.; Wang, L.; Wang, Q. A Cubic Spline Method Combing Improved Particle Swarm Optimization for Robot Path Planning in Dynamic Uncertain Environment. Int. J. Adv. Robot. Syst. 2020, 17, 172988141989166. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Z. Optimization of Dynamic Obstacle Avoidance Path of Multirotor UAV Based on Ant Colony Algorithm. Wirel. Commun. Mob. Comput. 2022, 2022, 1299434. [Google Scholar] [CrossRef]
- Condorí, M.; Albesa, F.; Altobelli, F.; Duran, G.; Sorrentino, C. Image Processing for Monitoring of the Cured Tobacco Process in a Bulk-Curing Stove. Comput. Electron. Agric. 2020, 168, 105113. [Google Scholar] [CrossRef]
- Miao, Z.; Yu, X.; Li, N.; Zhang, Z.; He, C.; Li, Z.; Deng, C.; Sun, T. Efficient Tomato Harvesting Robot Based on Image Processing and Deep Learning. Precis. Agric. 2023, 24, 254–287. [Google Scholar] [CrossRef]
- Banafian, N.; Fesharakifard, R.; Menhaj, M.B. Precise Seam Tracking in Robotic Welding by an Improved Image Processing Approach. Int. J. Adv. Manuf. Technol. 2021, 114, 251–270. [Google Scholar] [CrossRef]
- Gong, C.; Yang, Y.; Yuan, L.; Wang, J. An Improved Ant Colony Algorithm for Integrating Global Path Planning and Local Obstacle Avoidance for Mobile Robot in Dynamic Environment. Math. Biosci. Eng. 2022, 19, 12405–12426. [Google Scholar] [CrossRef] [PubMed]
- Hou, W.; Xiong, Z.; Wang, C.; Chen, H. Enhanced Ant Colony Algorithm with Communication Mechanism for Mobile Robot Path Planning. Robot. Auton. Syst. 2022, 148, 103949. [Google Scholar] [CrossRef]
- Qu, F.; Yu, W.; Xiao, K.; Liu, C.; Liu, W. Trajectory Generation and Optimization Using the Mutual Learning and Adaptive Ant Colony Algorithm in Uneven Environments. Appl. Sci. 2022, 12, 4629. [Google Scholar] [CrossRef]
- Wang, J.; Xu, Z.; Zheng, X.; Liu, Z. A Fuzzy Logic Path Planning Algorithm Based on Geometric Landmarks and Kinetic Constraints. Inf. Technol. Control 2022, 51, 499–514. [Google Scholar] [CrossRef]
- Loyola, O.; Kern, J.; Urrea, C. Novel Algorithm for Agent Navigation Based on Intrinsic Motivation Due to Boredom. Inf. Technol. Control 2021, 50, 485–494. [Google Scholar] [CrossRef]
- Yue, M.; Ning, Y. WIP Vehicle Control Method Based on Improved Artificial Potential Field Subject to Multi-Obstacle Environment: WIP Vehicle Control Method Based on Improved Artificial Potential Field. Inf. Technol. Control 2020, 49, 320–334. [Google Scholar] [CrossRef]
- Zagradjanin, N.; Rodic, A.; Pamucar, D.; Pavkovic, B. Cloud-Based Multi-Robot Path Planning in Complex and Crowded Environment Using Fuzzy Logic and Online Learning. Inf. Technol. Control 2021, 50, 357–374. [Google Scholar] [CrossRef]
- Wei Wei, W.W.; Wei Wei, F.G.; Fan Gao, R.S.; Rafał Scherer, R.D.; Robertas Damasevicius, D.P. Design and Implementation of Autonomous Path Planning for Intelligent Vehicle. J. Internet Technol. 2021, 22, 957–964. [Google Scholar] [CrossRef]
- Ge, H.; Ying, Z.; Chen, Z.; Zu, W.; Liu, C.; Jin, Y. Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption. Sensors 2023, 23, 7115. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; An, Y.; Huang, Q.-L.; Cui, Y.-H.; Hu, H.-S. Dynamic Path Planning of Mobile Robots Using Adaptive Dynamic Programming. Expert Syst. Appl. 2023, 235, 121112. [Google Scholar] [CrossRef]
- Na, Y.; Li, Y.; Chen, D.; Yao, Y.; Li, T.; Liu, H.; Wang, K. Optimal Energy Consumption Path Planning for Unmanned Aerial Vehicles Based on Improved Particle Swarm Optimization. Sustainability 2023, 15, 12101. [Google Scholar] [CrossRef]
- Yu, L.; Wang, X.; Hou, Z.; Du, Z.; Zeng, Y.; Mu, Z. Path Planning Optimization for Driverless Vehicle in Parallel Parking Integrating Radial Basis Function Neural Network. Appl. Sci. 2021, 11, 8178. [Google Scholar] [CrossRef]
- Ma, H.; Pei, W.; Zhang, Q. Research on Path Planning Algorithm for Driverless Vehicles. Mathematics 2022, 10, 2555. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, J.; Yang, B.; Shi, Y.; Li, Z. Optimal Search and Rescue Route Design Using an Improved Ant Colony Optimization. Inf. Technol. Control 2020, 49, 438–447. [Google Scholar] [CrossRef]
- Barzegar, A.; Doukhi, O.; Lee, D.-J. Design and Implementation of an Autonomous Electric Vehicle for Self-Driving Control under GNSS-Denied Environments. Appl. Sci. 2021, 11, 3688. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Main Usage Maps | Algorithm Type | Real Environmental Map Used |
|---|---|---|---|
| ACO | Grid map, Octo Map | Search algorithm | No |
| A* | Grid map | Search algorithm | No |
| PRM | Grid map | Search algorithm | No |
| PRT | Grid map | Probabilistic path planning algorithm | No |
| RRT | Grid map, Octo Map | Probabilistic path planning algorithm | No |
| GA | Grid map, | Search algorithm | No |
| PSO | Grid map, Octo Map | Search algorithm | No |
| Parameter | K | M | Alpha | Beta | Rho | Q | S | E |
|---|---|---|---|---|---|---|---|---|
| Value | 100 | 200 | 1.8 | 25 | 0.3 | 1 | 130 | 3513 |
| Initial Position: 130 | Target Position: 3513 |
|---|---|
| 130 191 252 313 374 435 496 557 618 679 739 799 860 921 982 1043 1104 1164 1223 1284 1344 1404 1465 1525 1586 1646 1705 1765 1825 1885 1945 2005 2065 2125 2186 2247 2308 2369 2430 2490 2551 2611 2672 2732 2793 2853 2913 2973 3033 3093 3153 3213 3273 3333 3393 3453 3513 | |
| Parameter | K | M | Alpha | Beta | Rho | Q | S | E |
|---|---|---|---|---|---|---|---|---|
| Value | 100 | 200 | 2 | 30 | 0.3 | 1 | 80 | 3220 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Kim, Y.-C.; Xu, B. Non-Standard Map Robot Path Planning Approach Based on Ant Colony Algorithms. Sensors 2023, 23, 7502. https://doi.org/10.3390/s23177502
Li F, Kim Y-C, Xu B. Non-Standard Map Robot Path Planning Approach Based on Ant Colony Algorithms. Sensors. 2023; 23(17):7502. https://doi.org/10.3390/s23177502
Chicago/Turabian StyleLi, Feng, Young-Chul Kim, and Boyin Xu. 2023. "Non-Standard Map Robot Path Planning Approach Based on Ant Colony Algorithms" Sensors 23, no. 17: 7502. https://doi.org/10.3390/s23177502
APA StyleLi, F., Kim, Y.-C., & Xu, B. (2023). Non-Standard Map Robot Path Planning Approach Based on Ant Colony Algorithms. Sensors, 23(17), 7502. https://doi.org/10.3390/s23177502