
Energy-Efficient Decentralized Broadcasting in Wireless Multi-Hop Networks †

 ,
,  ,
,  ,
,  , ,
, ,
Abstract
:1. Introduction
- We present BTP, a practical protocol that approximates a game-theoretical model for constructing an energy-minimal broadcast tree while preserving both its convergence and Nash Equilibrium properties. To the best of our knowledge, BTP is the first protocol for energy-efficient data dissemination in wireless multi-hop networks based on a provably optimal game-theoretical model that is implemented on real hardware.
- We design and implement a discovery mechanism that allows the nodes in a wireless multi-hop network to construct a broadcast tree in a decentralized fashion using locally available information from their direct neighbors.
- We change the decision strategy of the algorithm from a weakly dominant strategy to a strictly dominant strategy to avoid ping-pong effects, in which a node may potentially continue changing its decision without further reducing the transmission power.
- We implement and evaluate three different algorithms for inhibiting graph cycles. Specifically, (1) the Path-to-Source algorithm avoids cycles by letting each node keep track of the path from the root to itself so that each node can check the consistency of the spanning tree when making decisions. (2) The Mutex algorithm avoids cycles by letting each node lock its sub-tree when connecting to a different parent node, ensuring consistency at all times. (3) The Ping-to-Source algorithm allows for cycles temporarily, but it detects and resolves such cycles immediately.
- We evaluate BTP using different tools to assess its feasibility under various conditions. First, we use Matlab simulations to compare BTP against approaches from the literature. Second, we perform NS-3 simulations to investigate the scalability of BTP. Third, we present a real-world implementation of BTP, that is evaluated on a testbed of 75 Raspberry Pis deployed in one of our university buildings to explore its practical feasibility. The evaluations show that BTP can achieve an energy reduction of up to 90% in real-world experiments compared to a simple broadcast protocol.
- The code of the NS-3 implementation and the real-world implementation has been released under a permissive open-source license. Furthermore, all code required to reproduce the experiments as well as the experimental artifacts are also been made available.
2. Related Work
3. System Model
3.1. Graph Representation
3.2. Transmission Power Model
4. Broadcast Tree Protocol
4.1. Potential Game
4.1.1. Design of the Potential Game
4.1.2. Approximation of the Potential Game
4.2. BTP
4.2.1. Broadcast Tree Construction Phase
- , i.e., the transmission power of needed to reach all its children;
- , i.e., the transmission power of if j is no longer ’s child;
- , i.e., the transmission power of i needed to reach all its current children;
- , i.e., the transmission power of i if j becomes i’s child.
- Path-to-Source
- Mutex
- Ping-to-Source
4.2.2. Data Dissemination Phase
4.3. Protocol Packets
- Neighbor Discovery
- Child Request
- Child Confirmation
- Child Rejection
- Child Revocation
- End of Construction
- Application Data
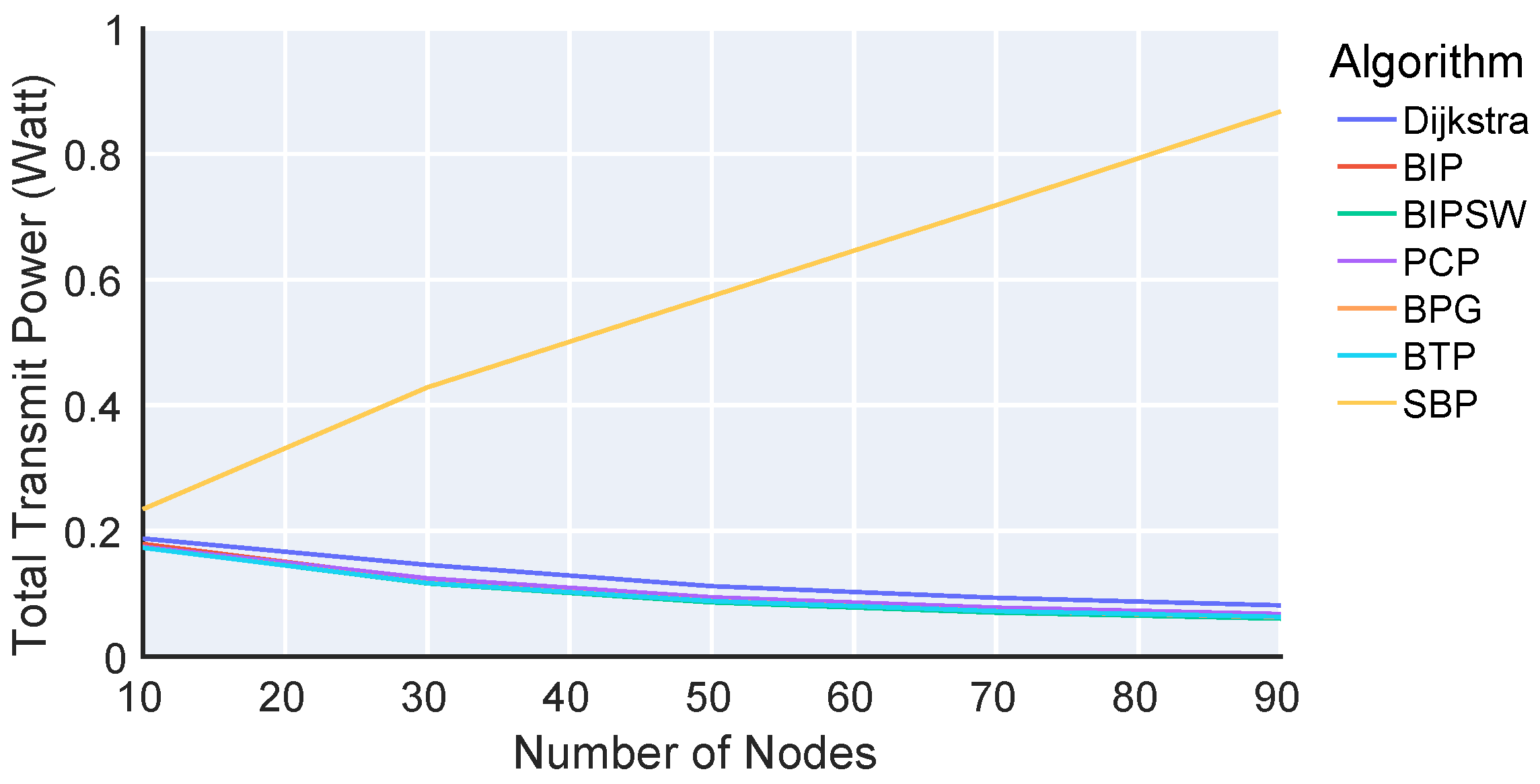
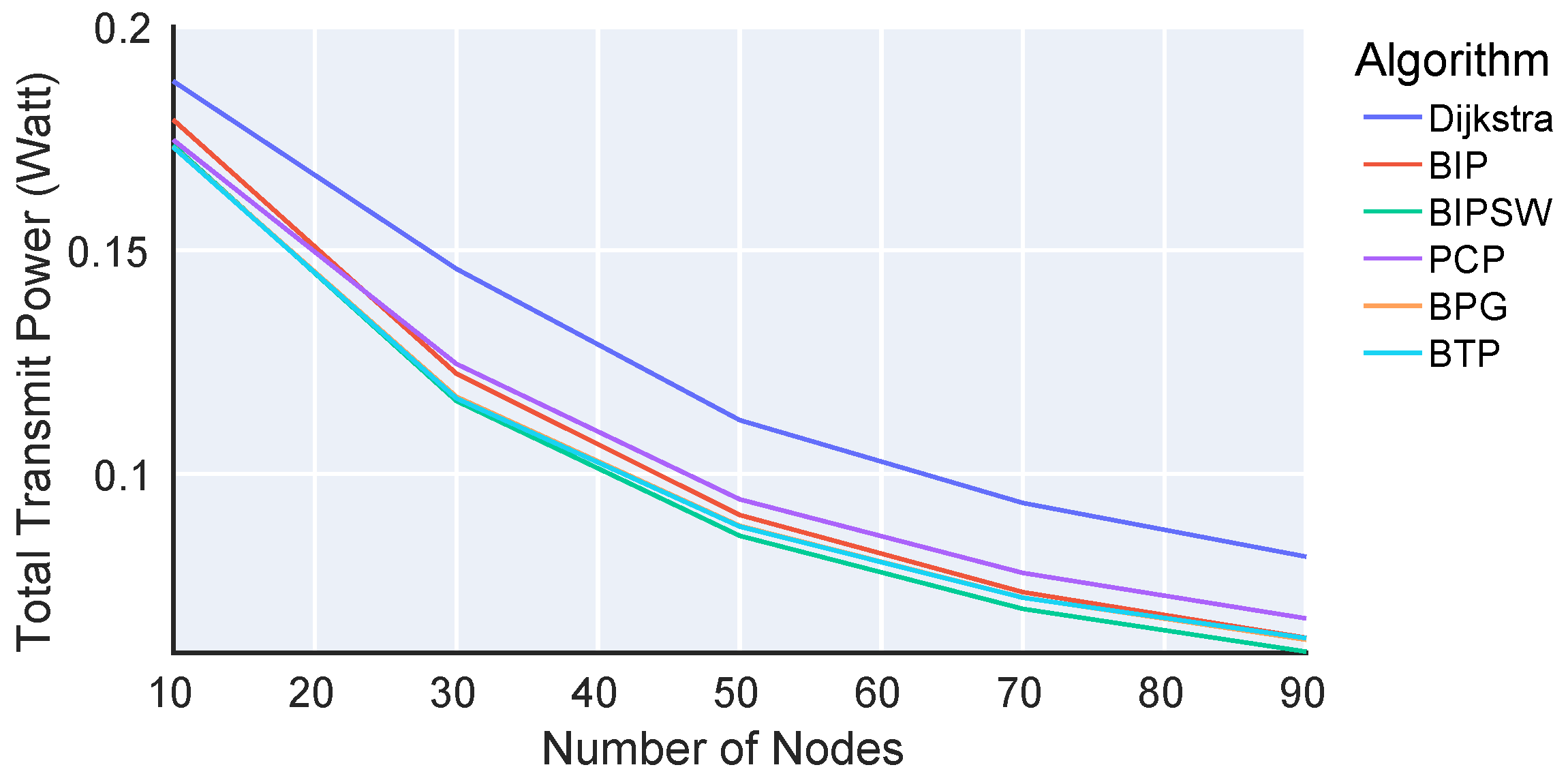
5. Matlab Simulation
5.1. Experimental Setup for the Matlab Simulation
- Dijkstra
- BIP
- BIPSW
- PCP
- BPG
- SBP
5.2. Results of the Matlab Simulation
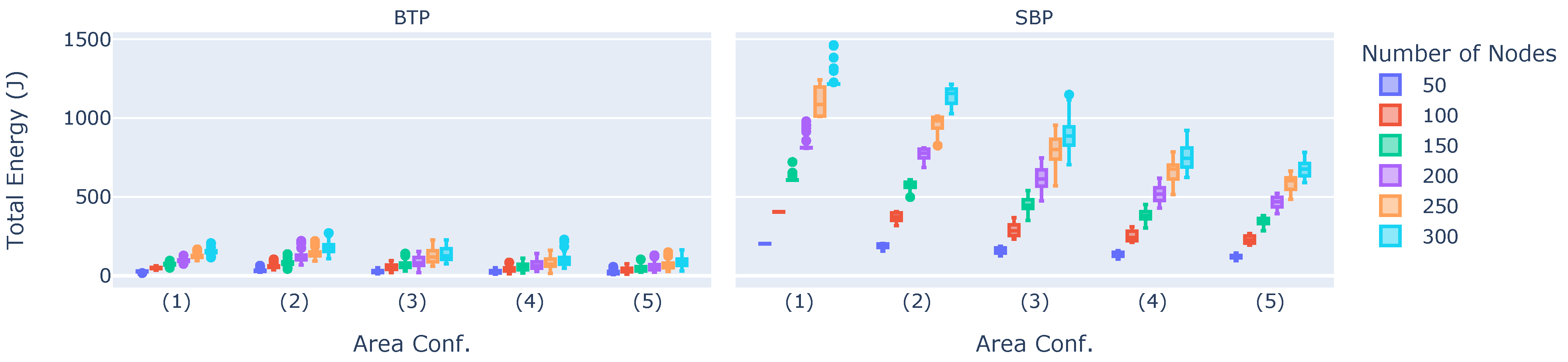
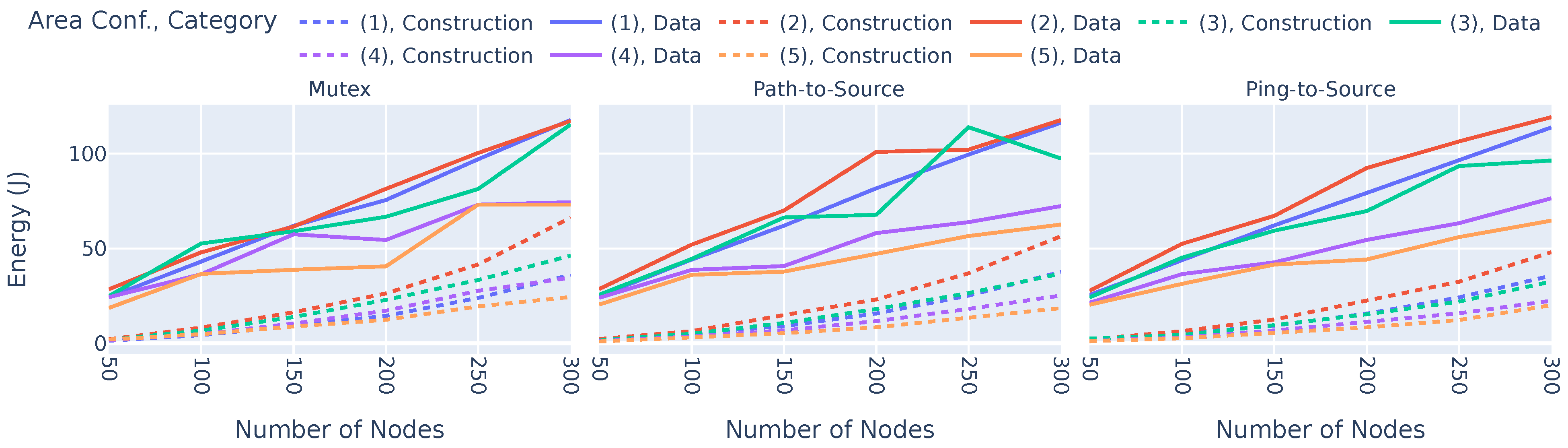
6. NS-3 Simulation
6.1. Experimental Setup for the NS-3 Simulation
6.2. Results of the NS-3 Simulation
6.2.1. Total Energy Consumption
6.2.2. Protocol Overhead
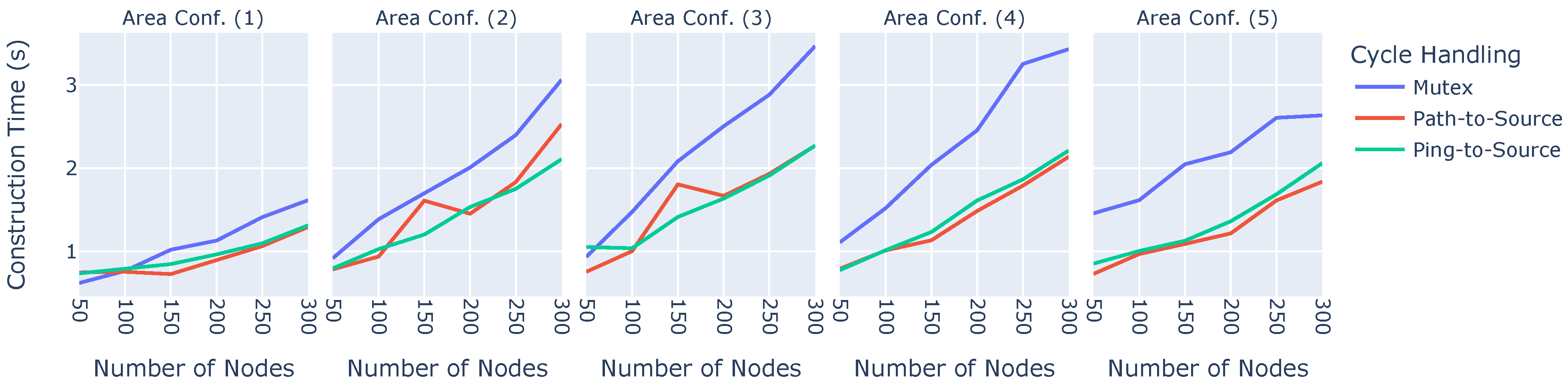
6.2.3. Time for Broadcast Tree Construction Phase
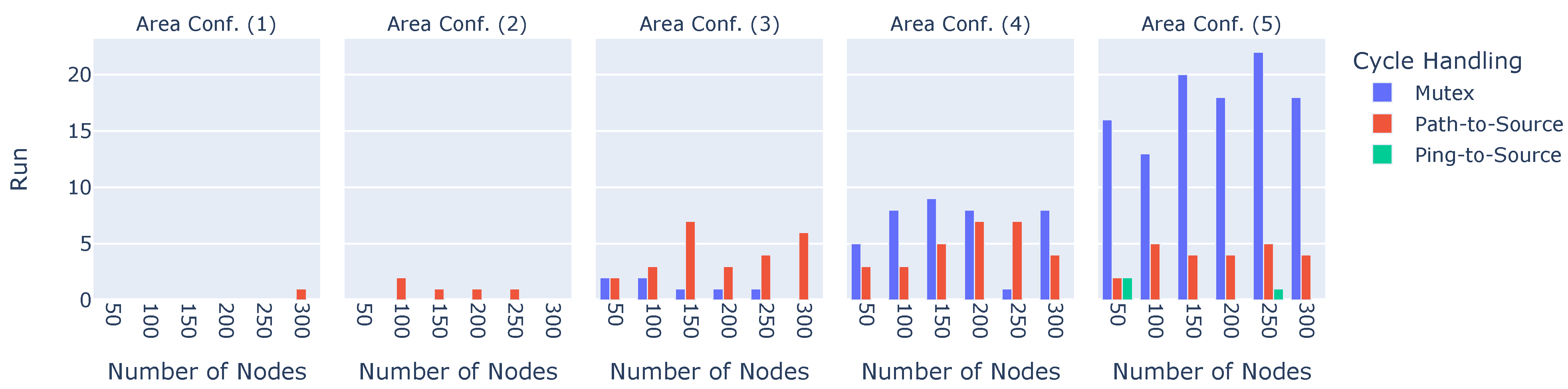
6.2.4. Cycle Handling
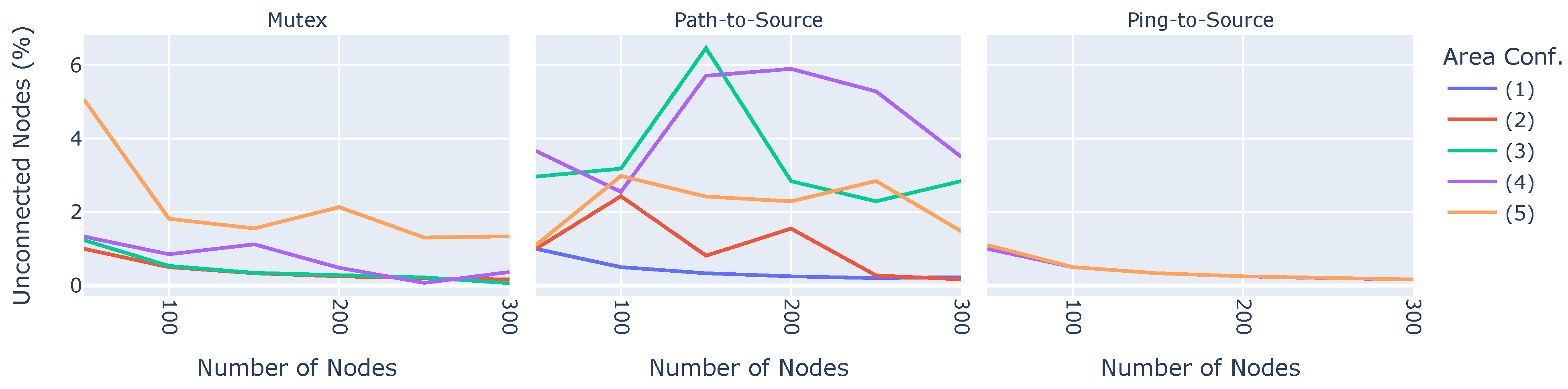
6.2.5. Unconnected Nodes
7. Real-World Implementation
7.1. Testbed
7.2. Experimental Setup for the Real-World Implementation
7.3. Results of the Real-World Implementation
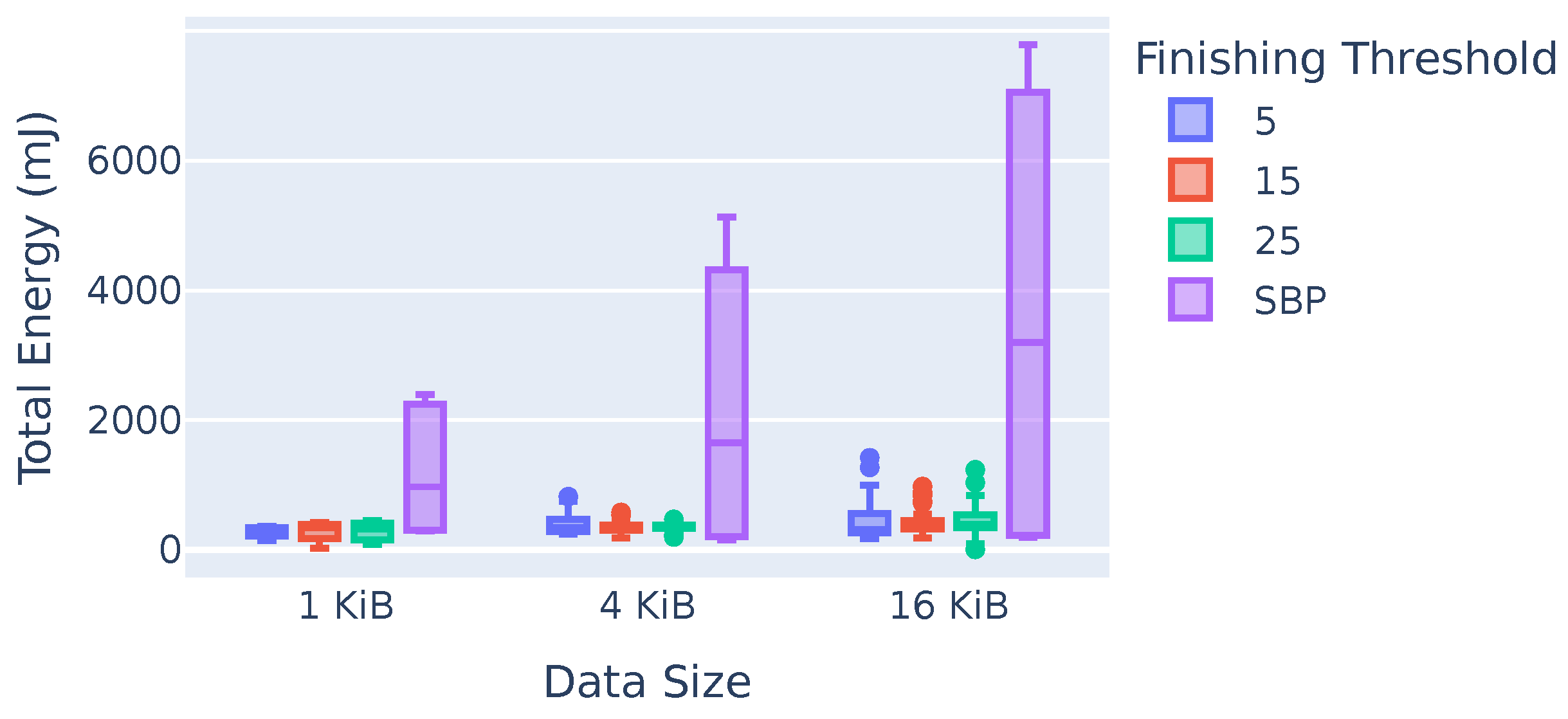
7.3.1. Total Energy Consumption
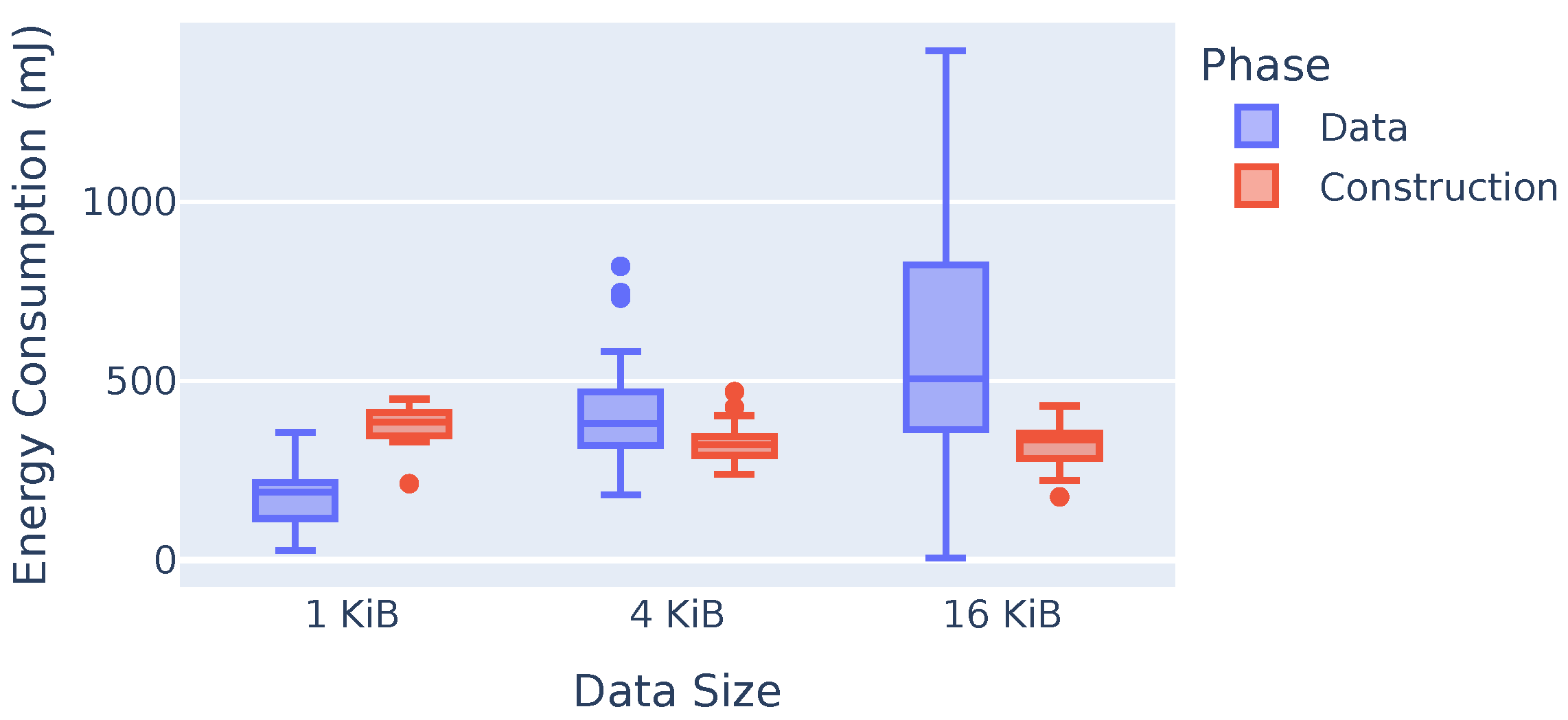
7.3.2. Energy Consumption for Tree Construction and Data Dissemination
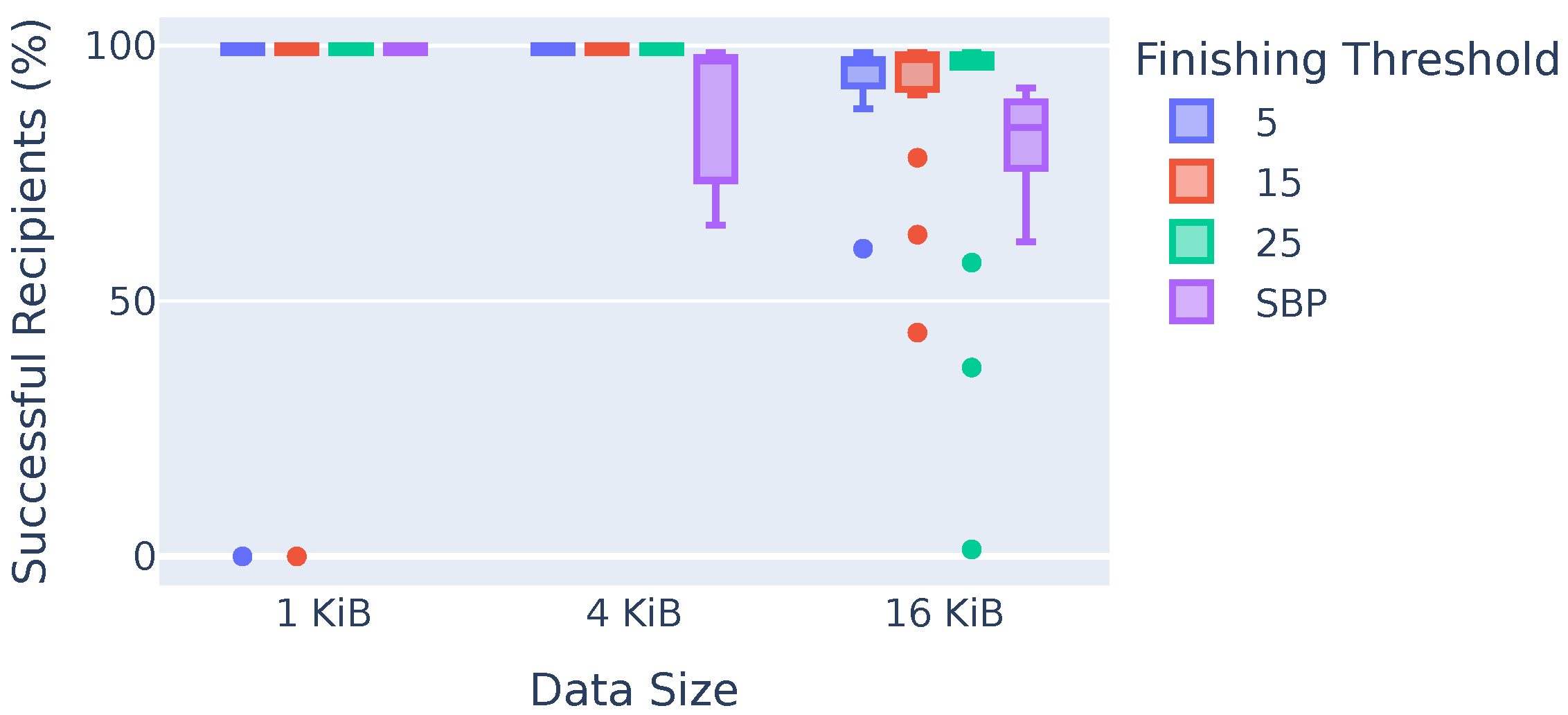
7.3.3. Successful Receptions
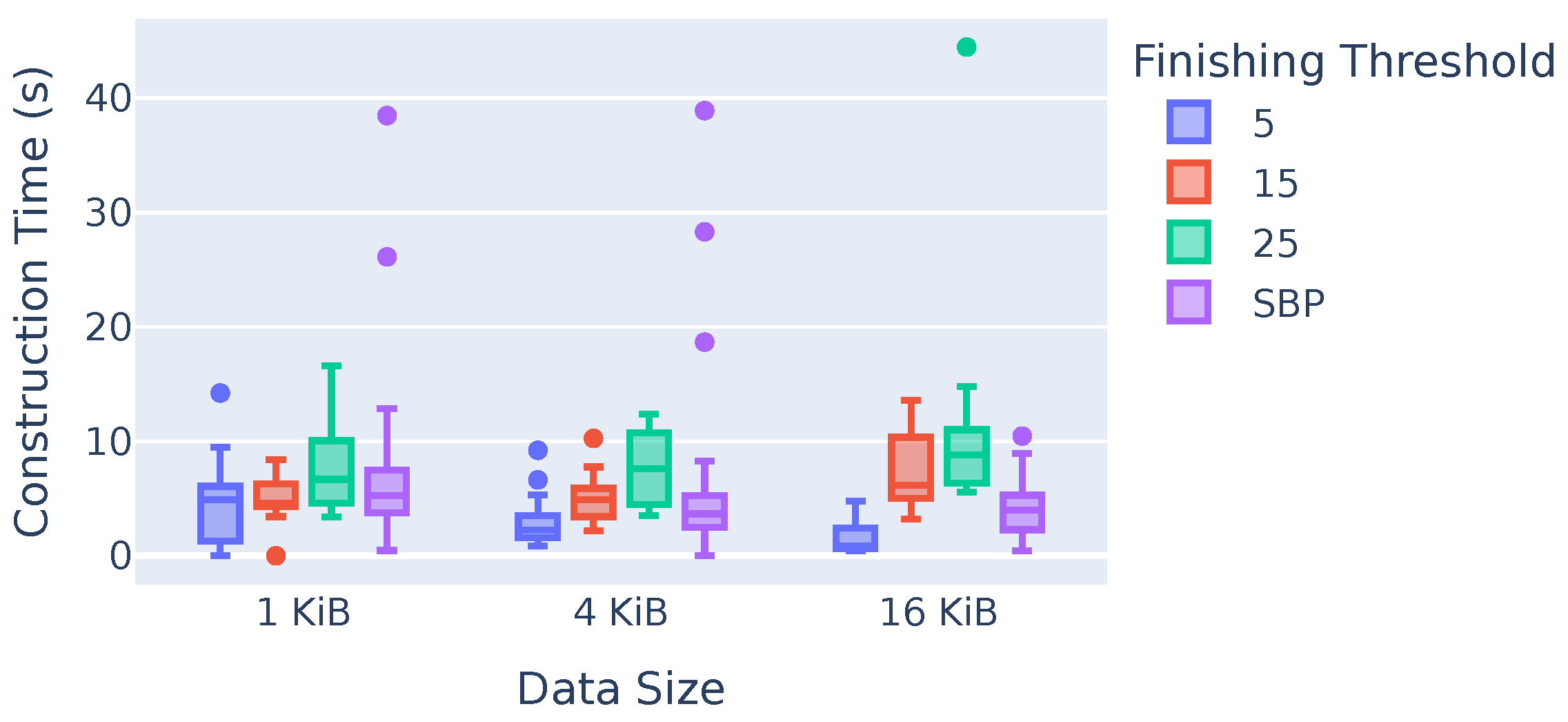
7.3.4. Time for Broadcast Tree Construction Phase
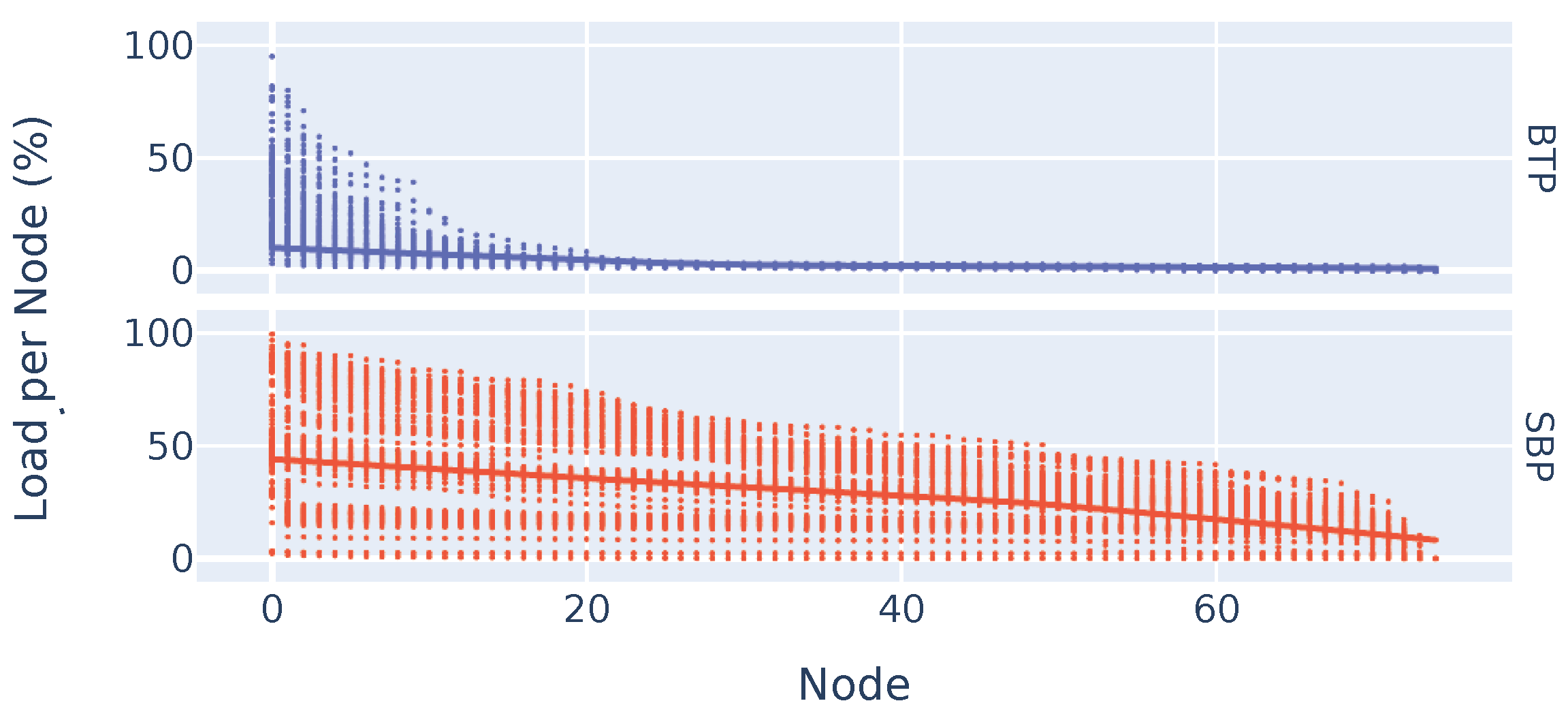
7.3.5. Contributions of Individual Nodes
8. Conclusions
8.1. Contributions
8.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kadota, I.; Sinha, A.; Uysal-Biyikoglu, E.; Singh, R.; Modiano, E. Scheduling Policies for Minimizing Age of Information in Broadcast Wireless Networks. Trans. Netw. 2018, 26, 2637–2650. [Google Scholar] [CrossRef]
- Malkhi, D.; Reiter, M.K.; Rodeh, O.; Sella, Y. Efficient Update Diffusion in Byzantine Environments. In Proceedings of the 20th Symposium on Reliable Distributed Systems, New Orleans, LA, USA, 28–31 October 2001; pp. 90–98. [Google Scholar]
- Kuorilehto, M.; Hännikäinen, M.; Hämäläinen, T.D. A Survey of Application Distribution in Wireless Sensor Networks. EURASIP J. Wirel. Commun. Netw. 2005, 2005, 1–15. [Google Scholar] [CrossRef]
- Li, D.; Jia, X.; Liu, H. Energy Efficient Broadcast Routing in Static Ad Hoc Wireless Networks. Trans. Mob. Comput. 2004, 3, 144–151. [Google Scholar]
- Mousavi, M.; Al-Shatri, H.; Wichtlhuber, M.; Hausheer, D.; Klein, A. Energy-efficient Data Dissemination in Ad Hoc Networks: Mechanism Design with Potential Game. In Proceedings of the International Symposium on Wireless Communication Systems, Brussels, Belgium, 25–28 August 2015; pp. 616–620. [Google Scholar]
- Wattenhofer, R.; Li, L.; Bahl, P.; Wang, Y.M. Distributed Topology Control for Power Efficient Operation in Multihop Wireless Ad Hoc Networks. In Proceedings of the 20th International Conference on Computer Communications, Anchorage, AK, USA, 22–23 April 2001; pp. 1388–1397. [Google Scholar]
- Wieselthier, J.E.; Nguyen, G.D.; Ephremides, A. Energy-efficient Broadcast and Multicast Trees In Wireless Networks. Mob. Netw. Appl. 2002, 7, 481–492. [Google Scholar] [CrossRef]
- Rahnavard, N.; Vellambi, B.N.; Fekri, F. Distributed Protocols for Finding Low-cost Broadcast and Multicast Trees in Wireless Networks. In Proceedings of the 5th Annual Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, 16–20 June 2008; pp. 551–559. [Google Scholar]
- Khabbazian, M.; Saffar, K.G. The Gain of Energy Accumulation in Multi-Hop Wireless Network Broadcast. Trans. Netw. 2019, 27, 1830–1844. [Google Scholar] [CrossRef]
- Cheng, L.; Niu, J.; Luo, C.; Shu, L.; Kong, L.; Zhao, Z.; Gu, Y. Towards Minimum-delay and Energy-efficient Flooding in Low-duty-cycle Wireless Sensor Networks. Comput. Netw. 2018, 134, 66–77. [Google Scholar] [CrossRef]
- Moon, K.; Yoo, D.S.; Lee, W.; Oh, S.J. Receiver Cooperation in Topology Control for Wireless Ad-hoc Networks. Trans. Wirel. Commun. 2014, 14, 1858–1870. [Google Scholar] [CrossRef]
- Han, R.; Yang, W.; Wang, Y.; You, K. DCE: A Distributed Energy-efficient Clustering Protocol For Wireless Sensor Network Based on Double-phase Cluster-head Election. Sensors 2017, 17, 998. [Google Scholar] [CrossRef]
- Yang, L.; Lu, Y.; Xiong, L.; Tao, Y.; Zhong, Y. A Game Theoretic Approach for Balancing Energy Consumption in Clustered Wireless Sensor Networks. Sensors 2017, 17, 2654. [Google Scholar] [CrossRef]
- Kuehne, A.; Le, H.Q.; Mousavi, M.; Wichtlhuber, M.; Hausheer, D.; Klein, A. Power Control in Wireless Broadcast Networks Using Game Theory. In Proceedings of the 10th International ITG Conference on Systems, Communications and Coding, Hamburg, Germany, 2–5 February 2015; pp. 1–5. [Google Scholar]
- Kumar, S.; Goswami, A.; Gupta, R.; Singh, S.P.; Lay-Ekuakille, A. A Game-theoretic Approach for Cost-effective Multicast Routing in the Internet of Things. Internet Things 2022, 9, 18041–18053. [Google Scholar] [CrossRef]
- Mousavi, M.; Al-Shatri, H.; Klein, A. Cost Sharing Games for Energy-efficient Multi-hop Broadcast in Wireless Networks. Trans. Wirel. Commun. 2019, 19, 310–324. [Google Scholar] [CrossRef]
- Kim, B.S.; Suh, B.; Seo, I.J.; Lee, H.B.; Gong, J.S.; Kim, K.I. An Enhanced Tree Routing Based on Reinforcement Learning in Wireless Sensor Networks. Sensors 2022, 23, 223. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, A.; Abdullah, S.; Bukhsh, M.; Ahmad, I.; Mushtaq, Z. An Energy-Efficient Data Aggregation Mechanism for IoT Secured by Blockchain. Access 2022, 10, 11404–11419. [Google Scholar] [CrossRef]
- Chen, F.W.; Kao, J.C. Game-based Broadcast over Reliable and Unreliable Wireless Links in Wireless Multihop Networks. Trans. Mob. Comput. 2012, 12, 1613–1624. [Google Scholar] [CrossRef]
- Karimi-Bidhendi, S.; Guo, J.; Jafarkhani, H. Energy-efficient Deployment in Static and Mobile Heterogeneous Multi-hop Wireless Sensor Networks. Trans. Wirel. Commun. 2021, 21, 4973–4988. [Google Scholar] [CrossRef]
- Khan, M.N.; Rahman, H.U.; Almaiah, M.A.; Khan, M.Z.; Khan, A.; Raza, M.; Al-Zahrani, M.; Almomani, O.; Khan, R. Improving Energy Efficiency with Content-based Adaptive Scheduling in Wireless Sensor Networks. Access 2020, 8, 176495–176520. [Google Scholar] [CrossRef]
- Dusia, A.; Ramanathan, R.; Ramanathan, W.; Servaes, C.; Sethi, A.S. ECHO: Efficient Zero-control-packet Broadcasting for Mobile Ad Hoc Networks. Trans. Mob. Comput. 2021, 21, 3163–3175. [Google Scholar] [CrossRef]
- Maric, I.; Yates, R.D. Cooperative Multihop Broadcast for Wireless Networks. J. Sel. Areas Commun. 2004, 22, 1080–1088. [Google Scholar] [CrossRef]
- Marques, D.; Senna, C.; Luís, M. Forwarding in Energy-constrained Wireless Information Centric Networks. Sensors 2022, 22, 1438. [Google Scholar] [CrossRef] [PubMed]
- Jiang, P.; Xu, Y.; Liu, J. A Distributed And Energy-efficient Algorithm for Event K-Coverage in Underwater Sensor Networks. Sensors 2017, 17, 186. [Google Scholar] [CrossRef]
- Sinha, A.; Modiano, E. Throughput-optimal Broadcast in Wireless Networks with Point-to-multipoint Transmissions. Trans. Mob. Comput. 2021, 20, 232–246. [Google Scholar] [CrossRef]
- Reina, D.; Günes, M.; Toral, S. Real Experimentation of Probabilistic Broadcasting Algorithms Based on Dissimilarity Metrics for Multi-hop Ad Hoc Networks. Ad Hoc Netw. 2016, 47, 1–15. [Google Scholar] [CrossRef]
- Liu, W.; Nakauchi, K.; Shoji, Y. A Neighbor-based Probabilistic Broadcast Protocol for Data Dissemination in Mobile IoT Networks. Access 2018, 6, 12260–12268. [Google Scholar] [CrossRef]
- Mager, F.; Baumann, D.; Trimpe, S.; Zimmerling, M. Toward Fast Closed-loop Control Over Multi-hop Low-power Wireless Networks. In Proceedings of the 17th International Conference on Information Processing in Sensor Networks, Porto, Portugal, 11–13 April 2018; pp. 158–159. [Google Scholar]
- Park, H.; Kim, B.S.; Kim, K.H.; Shah, B.; Kim, K.I. A Tree Based Broadcast Scheme For (m, k)-Firm Real-time Stream in Wireless Sensor Networks. Sensors 2017, 17, 2578. [Google Scholar] [CrossRef]
- Tai, K.Y.; Liu, B.C.; Hsiao, C.H.; Tsai, M.C.; Lin, F.Y.S. A Near-optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks. Sensors 2023, 23, 763. [Google Scholar] [CrossRef]
- Clausen, T.H.; Jacquet, P. Optimized Link State Routing Protocol (OLSR); The Internet Society: Reston, VA, USA, 2003. [Google Scholar]
- Ntlatlapa, N.; Johnson, C.A.D. Simple pragmatic approach to mesh routing using BATMAN. In Proceedings of the International Symposium on Wireless Communications and Information Technology in Developing Countries, Pretoria, South Africa, 6–8 October 2008; pp. 6–7. [Google Scholar]
- Ibrahim, M.S.; Shanmugaraja, P.; Raj, A.A. Energy-efficient OLSR Routing Protocol for Flying Ad Hoc Networks. In Advances in Information Communication Technology and Computing; Springer: Singapore, 2022; pp. 75–88. [Google Scholar]
- De Rango, F.; Fotino, M.; Marano, S. EE-OLSR: Energy Efficient OLSR routing protocol for Mobile Ad-hoc Networks. In Proceedings of the Military Communications Conference, San Diego, CA, USA, 16–19 November 2008; pp. 1–7. [Google Scholar]
- Oda, H.; Kulla, E.; Katayama, K. A Modified Energy-aware BATMAN Routing Protocol. In Proceedings of the 20th International Conference on Network-Based Information Systems, Bratislava, Slovakia, 24–26 August 2018; pp. 949–958. [Google Scholar]
- Lin, Z.; Lin, M.; De Cola, T.; Wang, J.B.; Zhu, W.P.; Cheng, J. Supporting IoT with rate-splitting multiple access in satellite and aerial-integrated networks. IEEE Internet Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-aided hybrid satellite-terrestrial relay networks: Joint beamforming design and optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Huang, C.; Yang, Z.; Alexandropoulos, G.C.; Xiong, K.; Wei, L.; Yuen, C.; Zhang, Z.; Debbah, M. Multi-hop RIS-empowered terahertz communications: A DRL-based hybrid beamforming design. IEEE J. Sel. Areas Commun. 2021, 39, 1663–1677. [Google Scholar] [CrossRef]
- Lin, Z.; An, K.; Niu, H.; Hu, Y.; Chatzinotas, S.; Zheng, G.; Wang, J. SLNR-based secure energy efficient beamforming in multibeam satellite systems. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 2085–2088. [Google Scholar] [CrossRef]
- Castañeda, E.; Silva, A.; Gameiro, A.; Kountouris, M. An Overview on Resource Allocation Techniques for Multi-User MIMO Systems. IEEE Commun. Surv. Tutor. 2017, 19, 239–284. [Google Scholar] [CrossRef]
- Monderer, D.; Shapley, L.S. Potential Games. Games Econ. Behav. 1996, 14, 124–143. [Google Scholar] [CrossRef]
- MacKenzie, A.B.; DaSilva, L.A. Game Theory for Wireless Engineers; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Mehlhorn, K.; Sanders, P. Algorithms and Data Structures: The Basic Toolbox, 1st ed.; Springer Publishing Company: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Schulz, M.; Wegemer, D.; Hollick, M. The Nexmon Firmware Analysis and Modification Framework: Empowering Researchers to Enhance Wi-Fi Devices. Comput. Commun. 2018, 129, 269–285. [Google Scholar] [CrossRef]
- Höchst, J.; Penning, A.; Lampe, P.; Freisleben, B. PIMOD: A Tool for Configuring Single-board Computer Operating System Images. In Proceedings of the Global Humanitarian Technology Conference, Seattle, WA, USA, 29 October–1 November 2020; pp. 1–8. [Google Scholar]
- Chakeres, I.D.; Belding-Royer, E.M. AODV Routing Protocol Implementation Design. In Proceedings of the 24th International Conference on Distributed Computing Systems Workshops, Tokyo, Japan, 23–24 March 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 698–703. [Google Scholar]
- Johnson, D.B.; Maltz, D.A.; Broch, J. DSR: The Dynamic Source Routing Protocol for Multi-Hop Wireless Ad Hoc Networks. Ad Hoc Netw. 2001, 5, 139–172. [Google Scholar]
- Klose, R. Decentralized Ultra-Reliable Low-Latency Communications through Concurrent Cooperative Transmission. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2023. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Notation | Description |
|---|---|---|---|
| T | Broadcast tree consisting of nodes V and edges E | A node of the broadcast tree T | |
| Source node of the broadcast tree | An edge of the broadcast tree T | ||
| Maximum possible Tx power | Tx power of node | ||
| Channel gain of | Noise power | ||
| SNR at node j | Minimum required SNR | ||
| All children of node | All neighbours of node | ||
| Tx power that node must use to reach node | Tx power that node must use to reach all its children | ||
| p | Sum of Tx powers of all nodes in V | ||
| Potential game | Set of rational players | ||
| Selected parent of destination node j at iteration t | Action profile at iteration t | ||
| Cost function of destination node j for action at iteration t | Set of possible actions (parents) for node j at iteration t | ||
| Parameter | Values |
|---|---|
| Protocols | BTP, BPG, BIP, BIPSW, PCP, SBP, Dijkstra |
| Nodes | 10, 20, 30, 40, 50, 60, 70, 80, 90 |
| Simulation Area | 500 m × 500 m |
| 20 dBm | |
| 3 | |
| 10 | |
| −90 dBm | |
| Finishing Threshold | 10 |
| Parameter | Values |
|---|---|
| Protocols | BTP, SBP |
| Cycle Handling | Ping-to-Source, Path-to-Source, Mutex |
| Nodes | 50, 100, 150, 200, 250, 300 |
| Simulation Area | (1) 100 m × 100 m, (2) 200 m × 200 m, (3) 300 m × 300 m, (4) 400 m × 400 m, (5) 500 m × 500 m |
| Data Size | 1 KiB |
| Finishing Threshold | 10 |
| Runs | 30 |
| Parameter | Values |
|---|---|
| Source Nodes | 3 |
| Data Sizes | 1 KiB, 4 KiB, 16 KiB |
| Finishing Threshold | 5, 15, 25 |
| Protocols | BTP, SBP |
| Runs | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sterz, A.; Klose, R.; Sommer, M.; Höchst, J.; Link, J.; Simon, B.; Klein, A.; Hollick, M.; Freisleben, B. Energy-Efficient Decentralized Broadcasting in Wireless Multi-Hop Networks. Sensors 2023, 23, 7419. https://doi.org/10.3390/s23177419
Sterz A, Klose R, Sommer M, Höchst J, Link J, Simon B, Klein A, Hollick M, Freisleben B. Energy-Efficient Decentralized Broadcasting in Wireless Multi-Hop Networks. Sensors. 2023; 23(17):7419. https://doi.org/10.3390/s23177419
Chicago/Turabian StyleSterz, Artur, Robin Klose, Markus Sommer, Jonas Höchst, Jakob Link, Bernd Simon, Anja Klein, Matthias Hollick, and Bernd Freisleben. 2023. "Energy-Efficient Decentralized Broadcasting in Wireless Multi-Hop Networks" Sensors 23, no. 17: 7419. https://doi.org/10.3390/s23177419
APA StyleSterz, A., Klose, R., Sommer, M., Höchst, J., Link, J., Simon, B., Klein, A., Hollick, M., & Freisleben, B. (2023). Energy-Efficient Decentralized Broadcasting in Wireless Multi-Hop Networks. Sensors, 23(17), 7419. https://doi.org/10.3390/s23177419