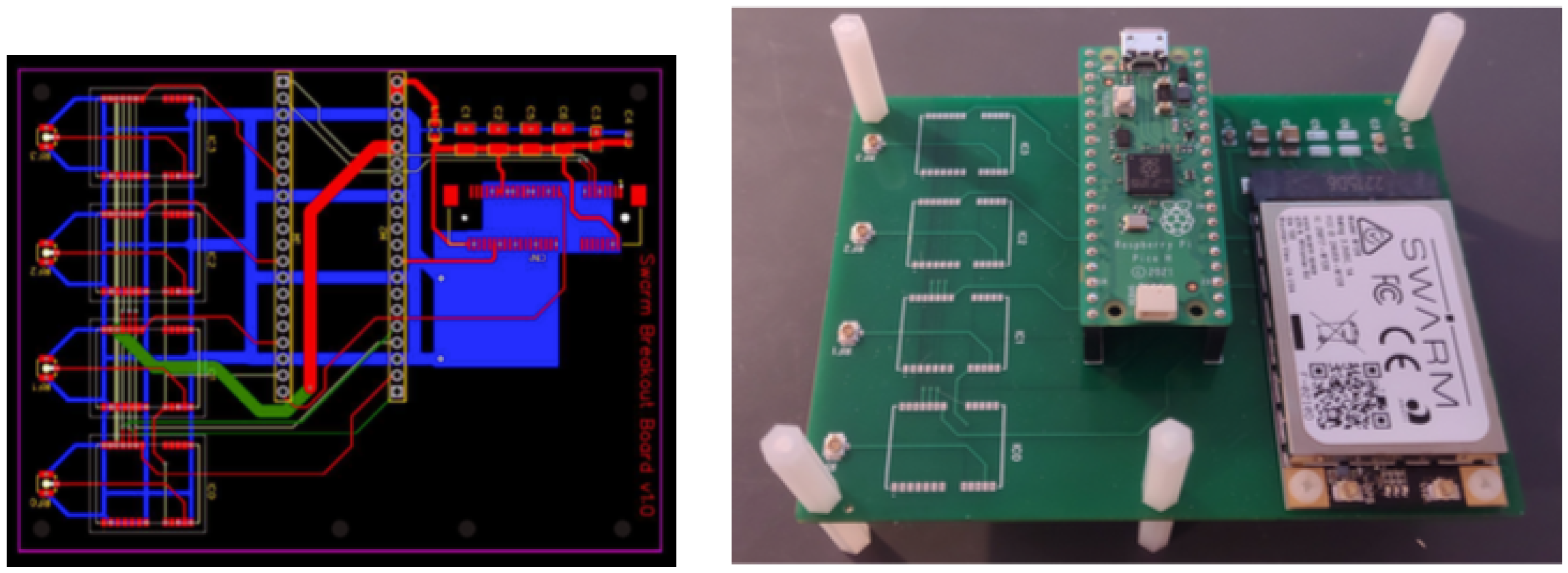
We implemented GNSS-IR water-level detection system on a printed circuit board (PCB),
Figure 2 and deployed on Swarm network by help of our software. The PCB includes from right to left: a Swarm M138 LEO Modem, a Raspberry Pi Pico, and pads for four GNSS modules for GNSS-IR water-level measuring (together with GNSS antennas). The proposed scheduling algorithm was implemented on a dual-core ARM Cortex M processor of the Raspberry Pi Pico, where each processor core executes one process of the code. The board is sending one 128-bit message per hour, to fit within a single Swarm data plan for USD 60/year.
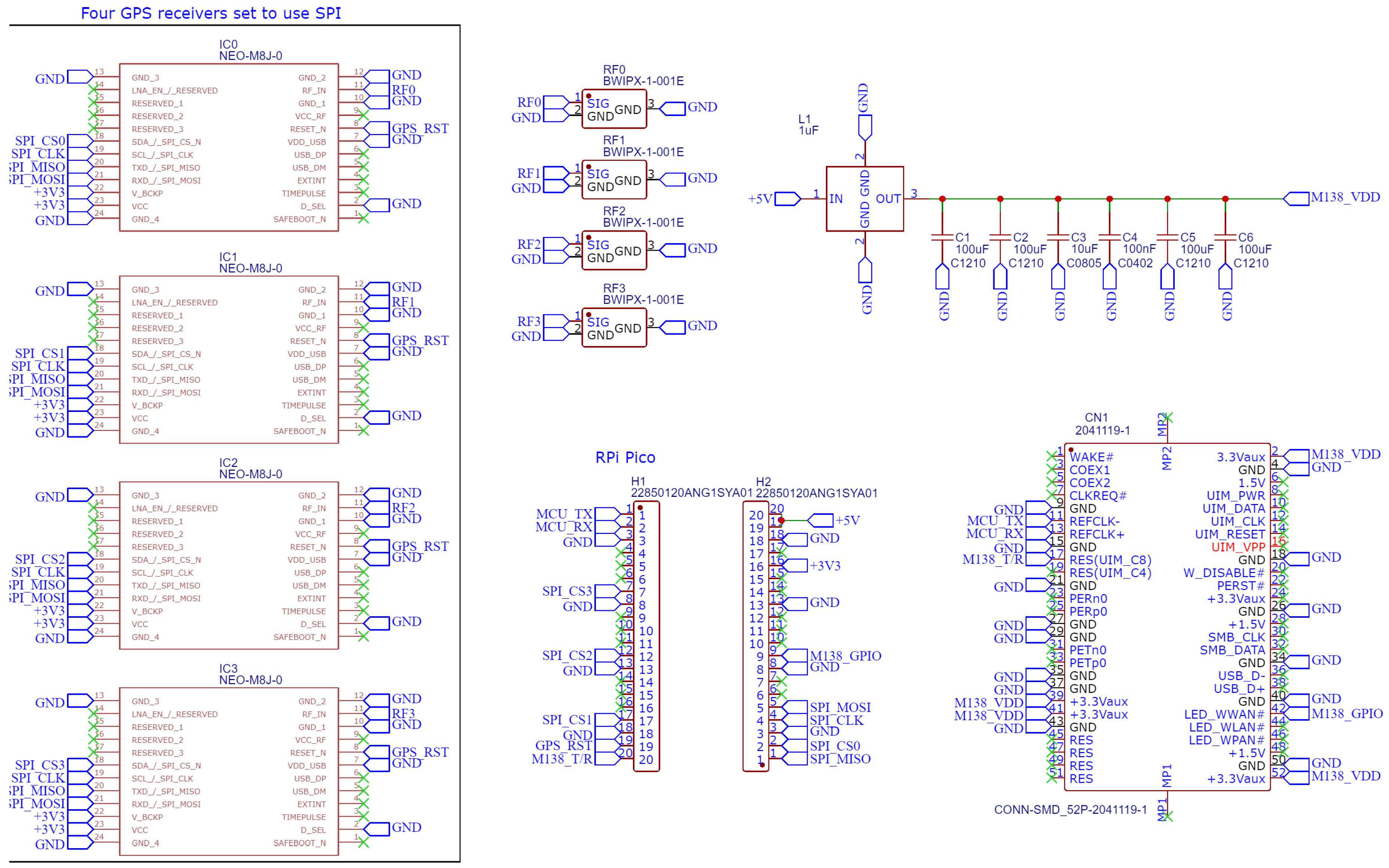
Figure 3 presents the schematic for the final prototype PCB design produced in this project. The left-hand side displays spaces for four GPS receivers and four GPS antenna connectors, which are the project-specific sensing components for GNSS-R water level sensing. The remaining two-thirds of the schematic are generalizeable to other projects that use the Swarm M138 LEO modem, including an mPCI-e connector, decoupling and feed-through capacitors, and headers for the microcontroller.
2.1. Satellite Modem Operating Specifications
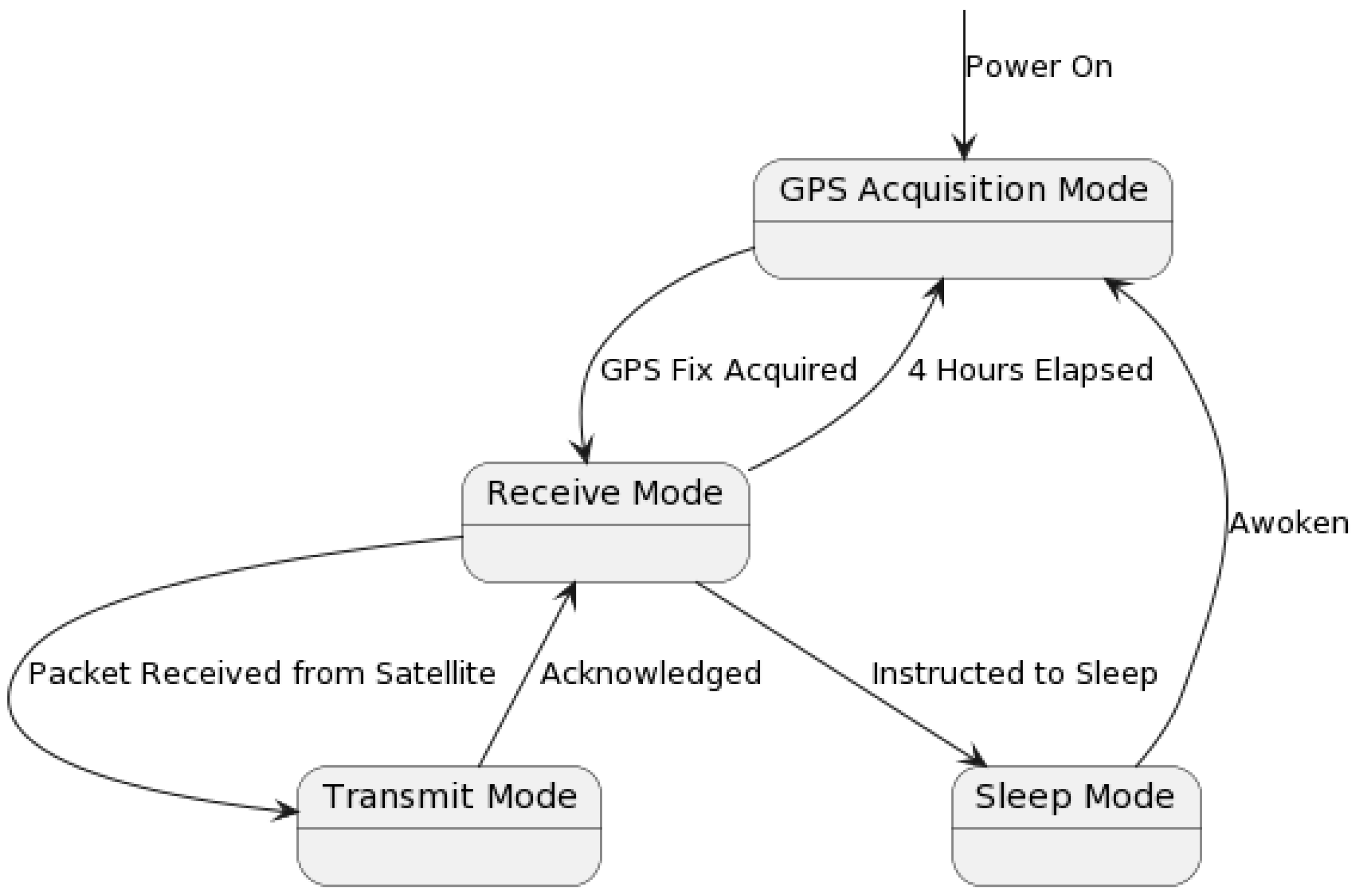
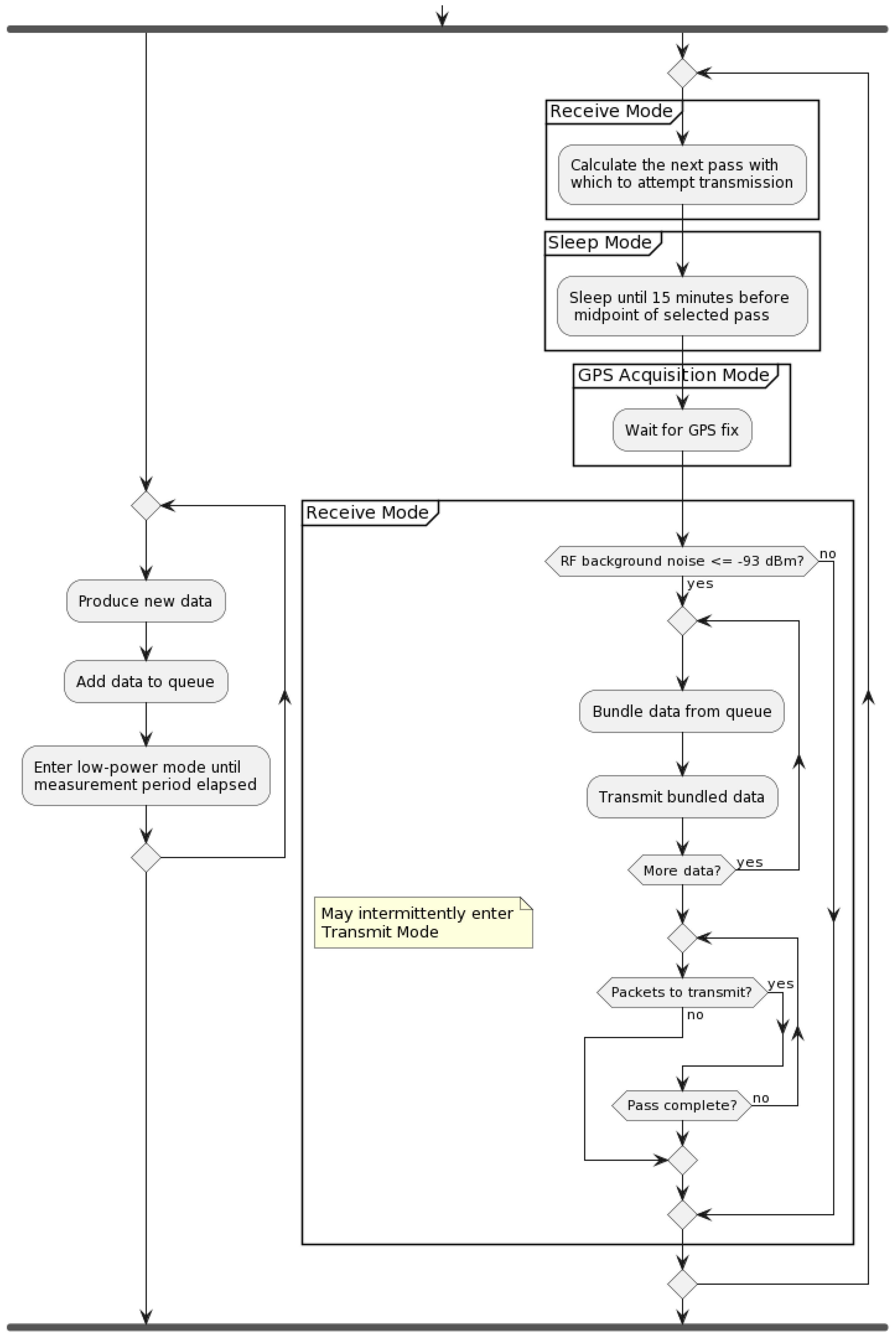
For remote GNSS-IR sensors, we use the independent LEO satellite provider Swarm Technologies. The energy consumption and, consequently, transmission scheduling will depend on Swarm’s service specification and operation of the Swarm M138 modem built into our board. The Swarm modem has four operating states: (1) Sleep Mode, (2) GPS Acquisition Mode, (3) Receive Mode, and (4) Transmit Mode,
Figure 4.
When the modem powers on, it enters GPS acquisition mode to determine the time and location. The modem will also re-enter GPS Acquisition Mode every 4 h or when awoken. Once a GPS fix has been acquired (30 s typical duration), the modem enters the Receive Mode, wherein it listens for a packet from any satellites passing overhead. This mode lasts until either a packet is received from a satellite (at which point it enters Transmit Mode), the modem is instructed to enter Sleep Mode, or enough time elapses that the modem automatically re-enters GPS Acquisition Mode. Robust operation and enhanced availability [
15] is built into the M138 modem, as well as ensured by handling the exceptions, such as those caused by lost signals (Swarm or GNSS) or power.
If a packet is received from a satellite, the modem enters Transmit Mode, attempting to transmit queued packets and receive an acknowledgement. If successful, it will return to Receive Mode, unless put into Sleep Mode.
Table 1 shows that transmission is 1–2 orders of magnitude more costly, while Sleep Mode uses 2 to 3 orders of magnitude less energy. Communication incurs a dominant part of energy consumption in IoT nodes [
16]—even more so for satellite access. For instance, Swarm reports that sending a maximum-length 192-byte packet at
W takes
s and
J, while in comparison Raspberry Pico benchmark for embedded code,
hello_sleep runs at 1.5 mW, as per the datasheet.
For Swarm modem’s operating modes, the energy-saving strategy includes:
Keep the modem in Sleep Mode as much as possible. When not in Sleep Mode, its default state is Receive Mode, which uses much more power.
Being awake dominates energy usage, either from the actual transmission energy or the GPS Acquisition and Receive Modes.
Failure to transmit will waste considerable energy. Thus, one should schedule transmission to when there is a high probability of successful communication.
2.2. Swarm Satellite Transmission
To minimize transmission power consumption requires understanding how the satellites, transmission, and data plans work. There is not always a satellite overhead, nor are the elevation angle and environmental conditions (e.g., background RF noise) always suitable. Data rate is limited, and frequent transmissions consume energy. These factors critically impact how we orchestrate transmissions.
The nature of Swarm satellite passages is disclosed by their Web-based tool that lists upcoming satellite passes, their times, durations and max elevation angles for a given location. Elevation angles observed in Montreal, Quebec, Canada range between 15 and 85 degrees, and pass durations typically range between 10 min and an hour. In reality, even with a satellite pass, the modem might not always be able to transmit. There are many factors impacting this: satellite pass “quality”, RF background noise, environmental conditions, antenna setup, and many others.
The first factor, satellite pass quality, is due to the pass duration and maximum elevation angle. Swarm gives no guidance on what factors impair successful transmission, and one objective of this paper is for each sensor to construct an empirical model for quantifying the likelihood of a pass leading to successful transmission. The second factor, RF background noise, does have guidance provided by Swarm,
Table 2, by which noise intensity of −93 dBm or lower is expected for successful transmission.
There are also the constraints imposed by Swarm data plans, priced at USD 60 per year per data plan, with up to four data plans stackable onto a single modem. Each data plan permits up to 750 packets per month, or about 25 packets per day, or about one per hour. These constraints imply that for finer temporal resolution (e.g., every 15 min), one must either bundle measurements, or pay to stack multiple data plans. The later, costly option also reduces the battery life, while bundling reduces the number of packets and possibly the cost.
The high-level view of the two main processes is shown in
Figure 5. The process on the left produces and inserts the data into a circular queue. Since the Swarm modem’s internal queue can drop packets after 48 h, the circular queue needs to contain 48 h of data. Each cycle of waking from sleep, acquiring GPS, listening for a satellite, and transmitting uses a lot of extra energy. In addition, due to environmental variables, there is inherent uncertainty as to how long one can expect the modem to be awake before transmitting successfully. This precise question is examined in the rest of the paper.
2.3. Efficient Packet Data Bundling
Note that there are a few important functions in
Figure 5, such as the data bundling, as the transmission duration directly causes energy consumption.
Table 3 shows the format of data. Each datum includes a timestamp, expressed in minutes since 1 January 1970. Due to the nature of the GNSS-IR, we omit seconds, which allows the re-purposing of 4 bits for 16 status codes. For completeness, using 28 bits allows timekeeping for 510 years. This format allows the whole datum to fit in 16 bytes, which divides evenly into 192 bytes per packet, such that each packet will be maximally utilized with 12 data points per packet.
Second implicit function within the high-level processes shown in
Figure 5 is that of good satellite pass selection, while the algorithm for actually predicting satellite passes—at least from the user perspective—is made fairly simple with the help of an open-source SGP4 satellite pass prediction Arduino library, quantifying what satellite passes are “good” depends much on environmental conditions, setup details, and empirical observations, as described next.
2.4. Online Learning Direct-to-Satellite Packet Scheduling
Transmitting to the LEO satellites can be unreliable due to minute changes in equipment setup or environmental factors. For example, severely cloudy days lead to too high RF background noise (i.e., higher than −93 dBm). Further, unshielded microcontroller within 10 to 20 cm of the antenna could increase measured RF background noise by as much as 5 to 10 dB. Further, slightly angling the antenna towards or away from a cell tower a few kilometers away could vary the RF background noise by several dB. With all these factors, creating a generalizable pass model is intractable.
Previous work with indirect-to-satellite scheduling shows that online learning is a successful strategy [
11]. Thus, each individual sensor should learn for itself and for its exact site conditions and hardware setup via online learning. Previous work in indirect-to-satellite scheduling uses a Lyupanov optimization problem for network queuing to avoid making assumptions about when new data would become available [
11] while the perfect knowledge of satellite overpasses is assumed. However, the data production rate is constant in our case, so rather than treating it as a network queuing problem, we ought to predict the uplink availability. Thus, a novel approach will be used.
2.4.1. Algorithmic Problem Statement
For a sensor placed in a remote location, a simple and
interpretable model is needed to be trusted to perform as expected [
17]. To achieve this, a relatively simple algorithm inspired from reinforcement learning has been devised. The goal is to learn the probability of successful transmission, given three input variables: (1) the satellite pass duration (in minutes), (2) the maximum elevation angle of the satellite pass (in degrees), and (3) the RF background noise (in dBm).
Borrowing the notation from reinforcement learning, the state space
S is the set of all possible input variable combinations, and the action space
A is the set of all possible actions [
18]. In this case,
A consists of the actions to transmit or not to transmit for each satellite pass with pass characteristics
. Let the function
v be the mapping of
S to a probability of successful transmission,
, and let the policy
represent the conditional probability of choosing a particular action
given a state
. Hence, the policy is the mechanism for choosing which satellite pass to select, given a set of passes and their characteristics.
In Equation (
1),
represents the action at time step
t, and
represents the state at time step
t. Regarding the probability success mapping
V, a natural objective is thus to approximate it with collected experience: as the system runs and has successes and failures transmitting with different states
, it will converge to true probabilities of successful transmission for a given state, i.e., the value function
v [
18,
19].
2.4.2. Modified Monte Carlo Learning
Monte Carlo learning methods approximate a value function in a simple and interpretable way by taking the value of a state to be the average return at the end of a training episode [
18,
19]. In the direct-to-satellite packet scheduling, the episodes are of length one, i.e., there is no sequential decision-making, simplifying the problem. If the reward is taken to be 1 for a successful transmission and 0 for an unsuccessful transmission, then the value function can be taken to be the average rate of successful transmission from a given state. If for a given state of satellite pass characteristics and RF noise, transmission is successful 50% of the time, then the value function is 0.5.
However, Monte Carlo learning requires a discrete state space, whereas the state space for this problem is continuous, so we discretize the state space. Using the Swarm pass checker, it is known that all satellite passes shown are between 15 and 90 degrees and almost all between 10 and 60 min. Additionally, while RF noise is technically continuous, the modems only report whole numbers, e.g., −95 dBm. If only integers within the range −93 dBm (the highest noise Swarm reports success transmitting with) to −106 dBm (the lowest noise measured in this project) are considered, this is naturally discretized.
Table 4 shows how the state space has been chosen to be discretized. With 5 buckets for each state variable, some simple combinatorics gives 125 unique combinations, where the total set of 125 combinations represents the discretized state space.
The remaining question is that of the policy
. Clearly, once a good approximation of the true value function is made, the policy
should exploit that knowledge to select the most promising satellite passes. At the beginning, the system will not know about a good satellite pass, and it will thus have to explore with passes of different characteristics. This is an example of the
exploration–exploitation problem in reinforcement learning [
18,
19]. A common approach is to explore early on and gradually exploit more with time.
2.4.3. Modified k-Armed Bandit
Regarding the policy for packet scheduling, there is a similarity to the
k-armed bandit problem, whereby an agent repeatedly plays the same one-step episode. In each game, the agent has a selection of options, which may give varying stochastic rewards. The goal is to learn over time which actions give the greatest expected reward [
18,
19]. A common approach to this problem involves softmax (Boltzmann) exploration, which derives a set of probabilities corresponding to each possible action [
20]. The action with the highest expected reward has the highest probability of selection, plus all the choices are guaranteed to sum to 1 by the design.
Our problem is slightly different from the k-armed bandit problem in two important ways: (1) the set of actions available to the agent in each episode is different, and (2) expected reward is not only the probability of successful transmission, but its utility in the given application, most notably the timeliness. Regarding the first point, the agent is faced with a different selection of satellite passes each episode, each with their own set of pass characteristics and times at which they occur. This problem is solvable, as the modified Monte Carlo learning methods will allow keeping track of the estimated reward of each action.
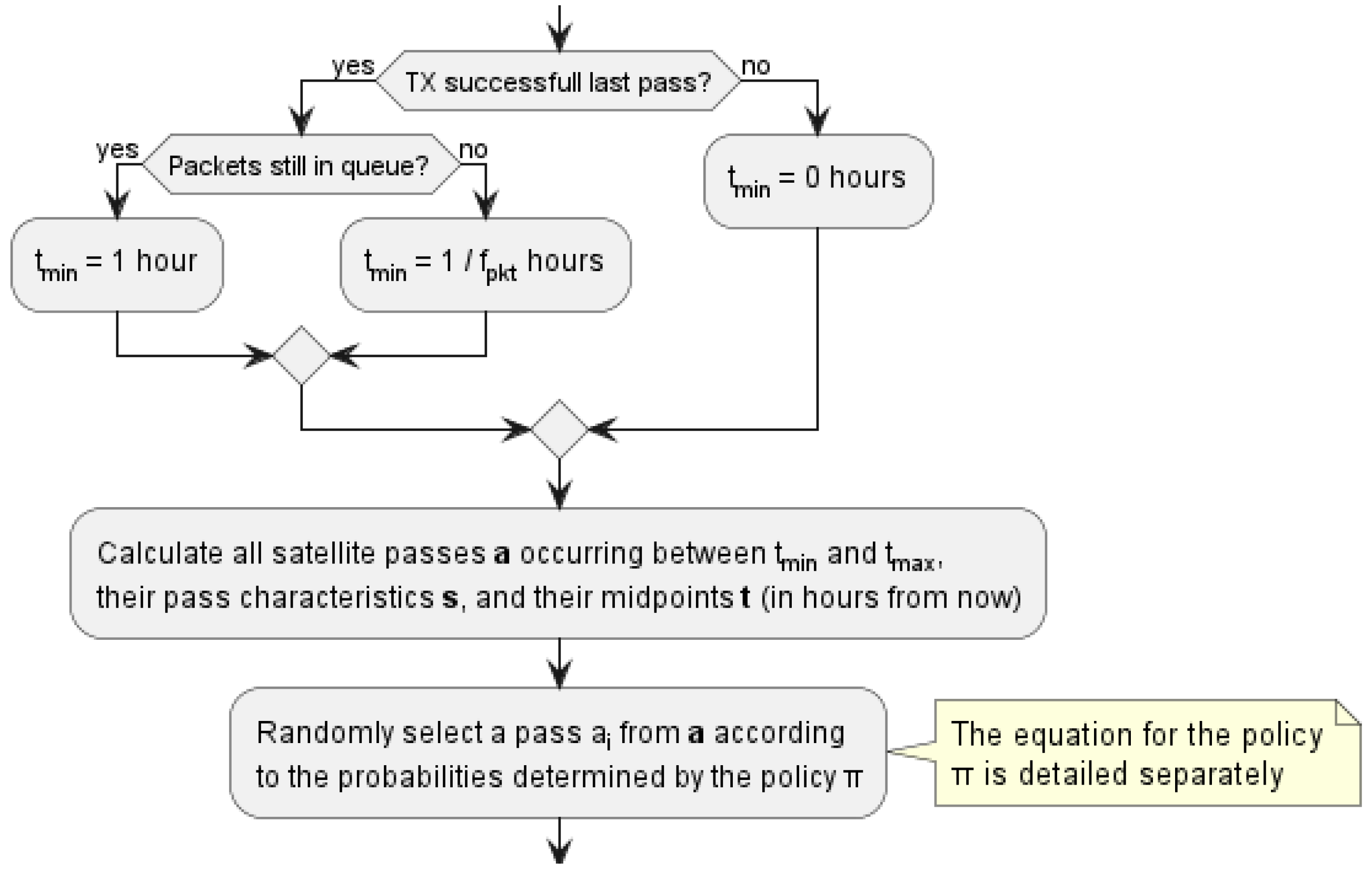
2.4.4. Temporal Bounds for Packet Scheduling
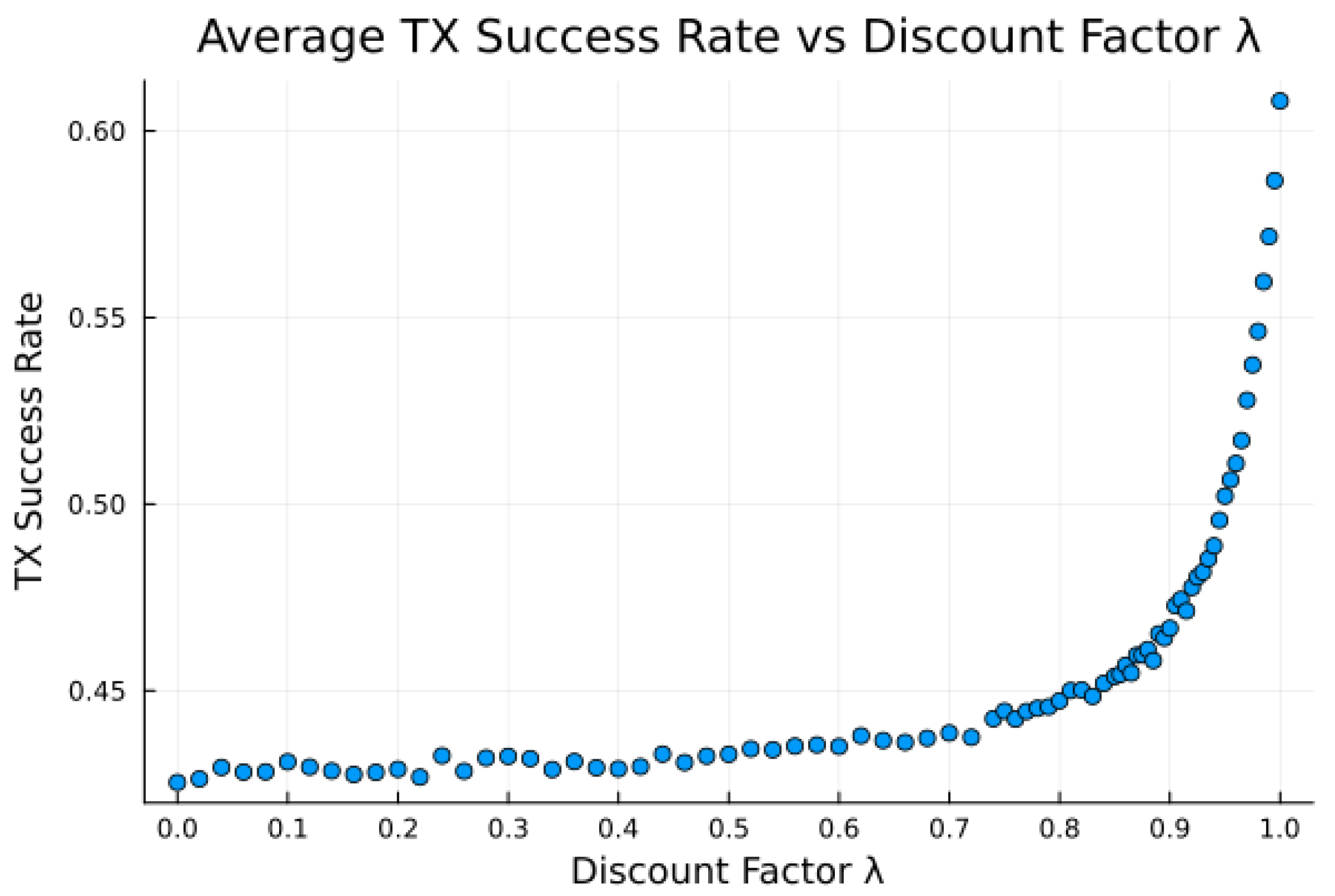
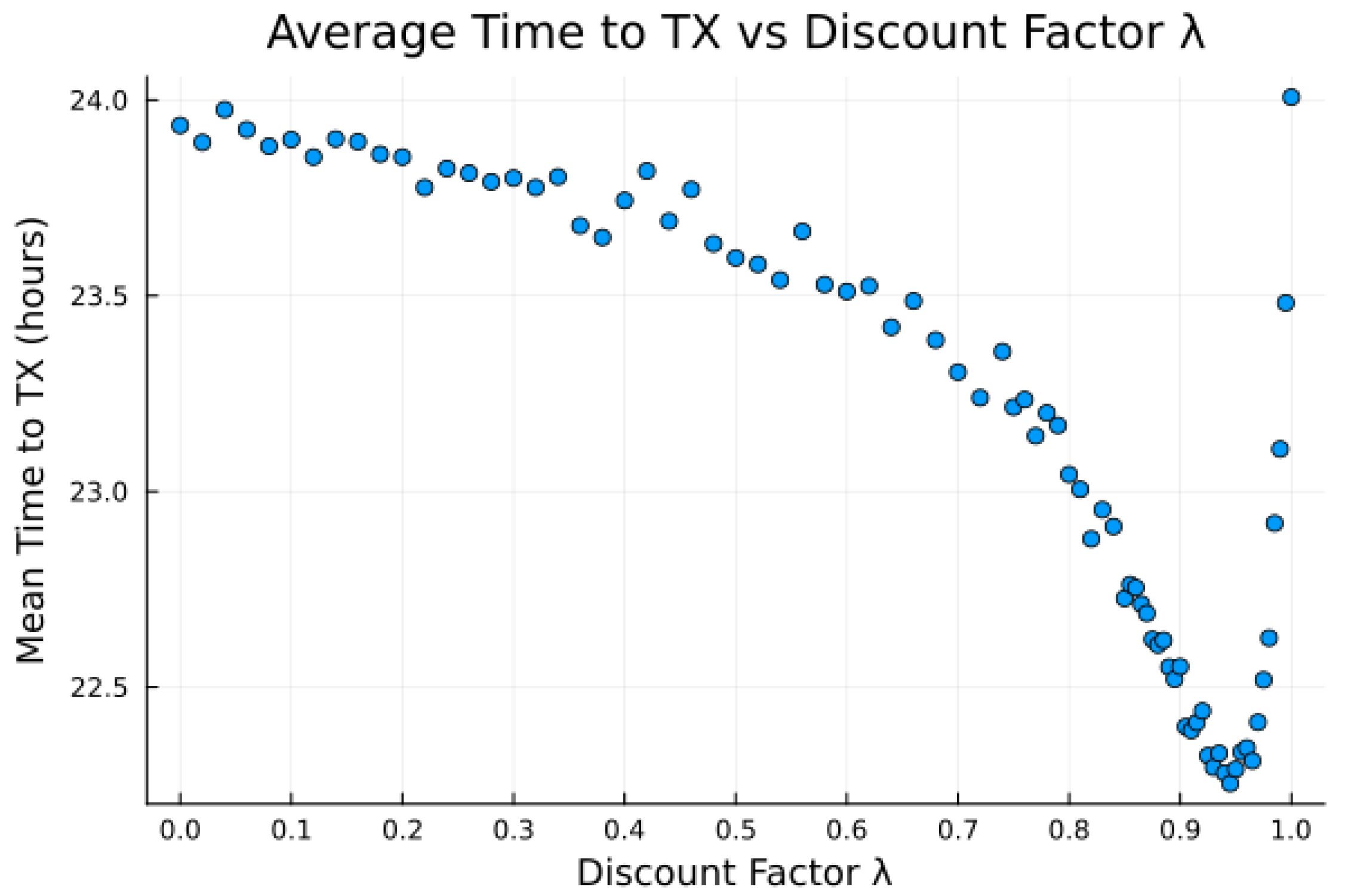
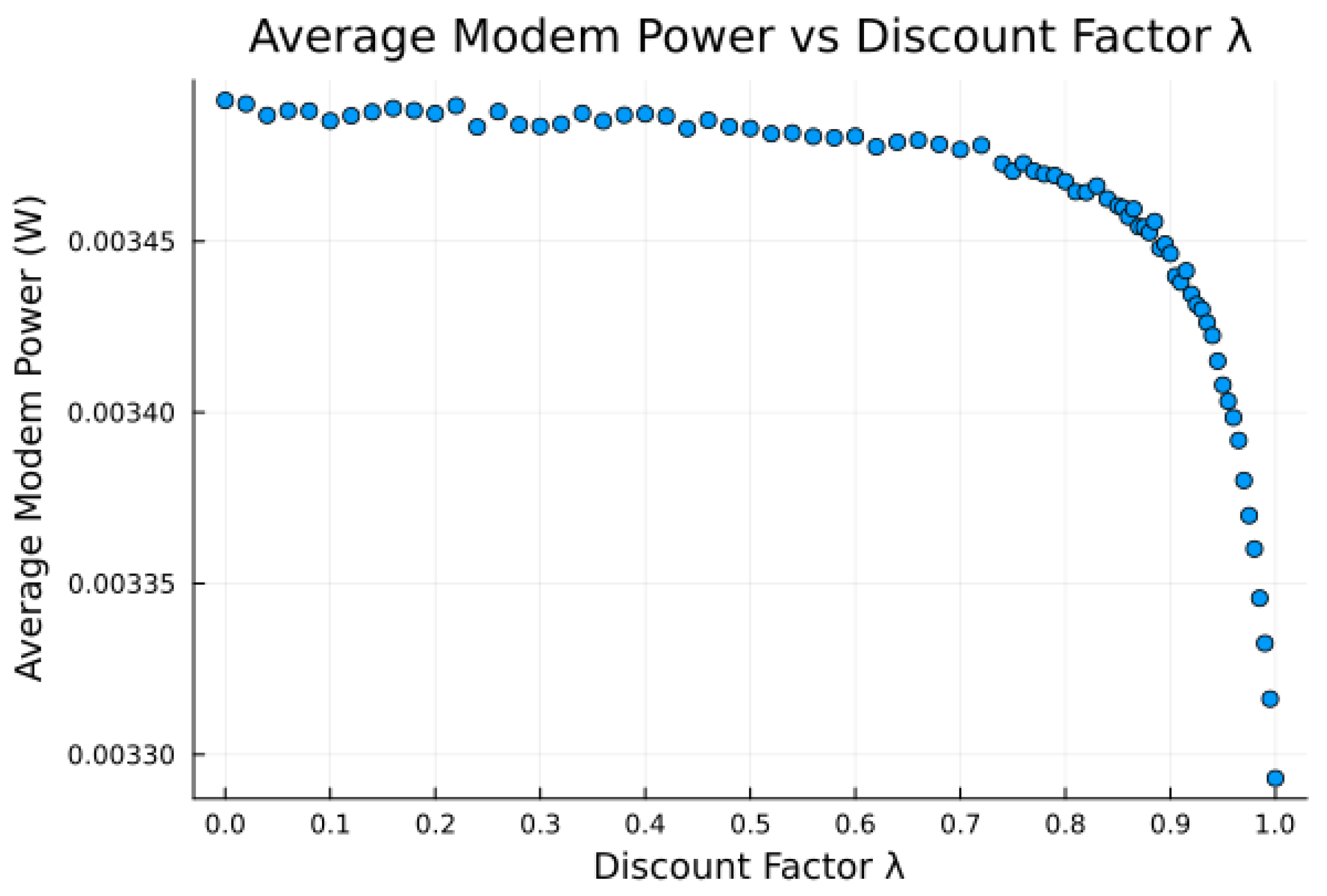
Addressing the reward modeling, we apply the following reasoning. A good pass in an hour is not the same as an equally good pass occurring after 24 h because: (1) data needs to be transmitted regularly, (2) the circular queue holding data has a finite capacity, and (3) the Swarm modem will drop packets from its transmission queue after a timeout. Thus, to model he preference for more prompt transmissions, a discount factor is applied to reduce the value of later passes.
Under the data plan, each modem can transmit at most one packet per hour to remain within the budget. Since there are many satellite passes to consider, the rules are needed for the interval of packet scheduling. Such rules are shown in
Figure 6, in which
and
are the minimum and maximum amount of time (in hours) for a satellite pass, respectively,
is a vector of satellite passes between
and
(
is the
i-th element of
). Further,
is a vector of states (i.e., pass characteristics and RF background noise) of satellite passes of
. Let
be a vector of midpoint times of satellite passes of
.
2.4.5. Algorithmic Formulation
Since we are developing a learning approach to the LEO transmission scheduling, we will rely on the activation function for classification/learning, softmax. For the set of values
, it is for each value
from as:
Since softmax adds up to 1 across all inputs, it effectively creates a probability distribution function that disproportionally favors larger values of .
Let
be the data point generation rate (in data points per hour), and
bundlesize be the number of data points that comprise a full bundle. Then, the rate of full packet bundling
is:
. Let
be the vectorized softmax function where
is the softmax of the i-th element of
, and let
the vectorized value function. We express the policy
as:
where the ⊖ and ⊙ symbols operating on vectors
and
are the element-wise subtraction and multiplication, respectively. Equation (
3) expresses the probability of selecting a satellite pass
from interval
as the softmax of the estimated transmission success probability for the pass, multiplied by a discount factor for future passes. Pass quality and promptness will be prioritized, while still giving a chance for exploration of passes currently predicted to be worse. This preference allows Monte Carlo learning to improve the value function estimates with time.
2.5. Uplink Transmission Energy Model
Energy consumption modeling of communication interfaces is a complex issue, and we have relied on the existing Iridium satellite communication model [
21], as well as a model for long-range terrestrial network Sigfox [
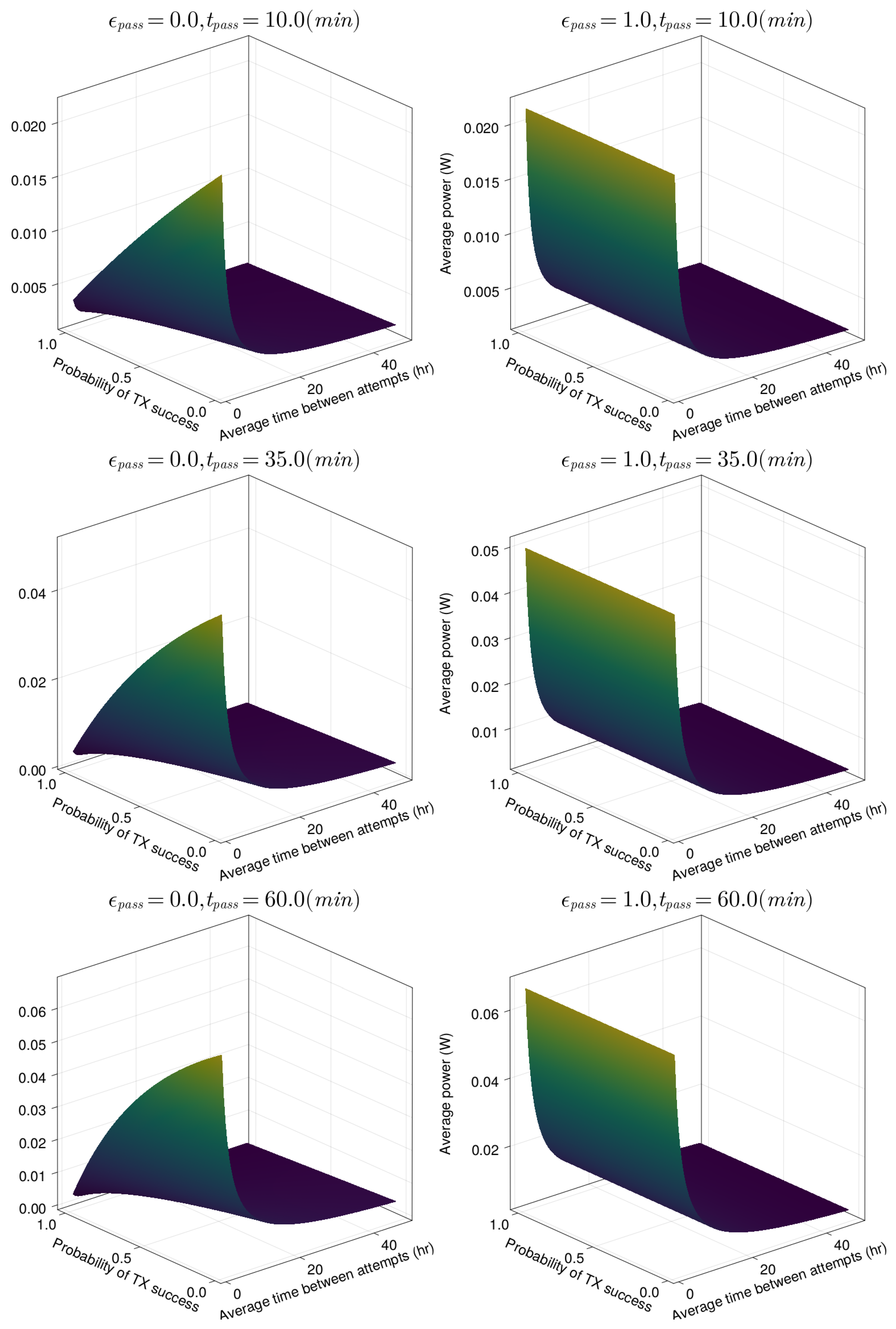
22], as the closest detailed model that similarly to us relies on the published energy consumption values from the datasheets. To determine the average power consumption, we introduce the unified uplink transmission energy model. Since the stochastic nature of transmission success prohibits the derivation of a deterministic model, a probabilistic model is created to give an estimate of average power consumption. There are two key causes of transmission non-determinism: (1) whether a transmission will succeed for a given pass, and (2) if it does succeed, how long the modem will be in Receive Mode before it is able to transmit.
To build the model, let
be the mean time that the modem is in Sleep Mode,
be the mean time the modem is in GPS Acquisition Mode, and
be the mean time the modem is in Receive Mode before transmission is successful. With typical modem power consumption values
,
, and
, the total energy usage in these modes over a single transmit attempt cycle,
is:
where
is the number of packets transmitted in a given pass. Depending on satellite pass selection and/or previous transmission attempt successes,
may be 1 or larger. In the case of an unsuccessful attempt,
is 0. An expression for non-zero
is:
where
is the transmission success probability,
is the mean transmission attempt rate, and
is the rate at which fully bundled packets are generated. Since
is smaller or equal to
,
is guaranteed to be 1 or greater because successful transmission of one packet entails successful transmission of all queued packets.
In Equation (
4), also note that, while
,
,
,
, and
(at least for full packets) are constant,
and
are variable. Here,
represents the mean time in the Sleep Mode before making a transmission attempt, approximated as:
.
The value of depends on how long the modem waits until it receives a packet and begins the transmission, or the pass is over. For a successful transmission, the quickest case is to transmit immediately after exiting GPS Acquisition Mode. The slowest success case is to transmit at the very end of the satellite pass. The worst failure case is the modem reaching the end of a given satellite pass in Receive Mode, with no transmission. In terms of , this case and successful transmission at the very end of the pass would be approximately equal. All three cases depend on the mean pass duration, denoted as .
can take two forms, depending on the transmission attempt success. A success is expressed in Equation (
6), where
represents the proportion of a satellite pass spent in Receive Mode before receiving a packet from the satellite and is able to transmit. For pessimistic and optimistic models,
can be treated as either 1 or 0, as these serve as the upper and lower bounds of the time in Receive Mode for a given satellite pass.
If the attempt is a failure, the model is represented by Equation (
7). Note that there is no
value and no
, as the system will wait out a full pass without transmissions.
The above two cases can be combined into a complete model:
which expands into the following expression:
where
,
, and
are all constants and given by Swarm. Similarly, location fix time
is rather constant, reported to be about 30 s by Swarm. Furthermore, note that
depends on site conditions, project requirements, and packet scheduling. Similarly,
and
depend heavily on site conditions and packet scheduling.
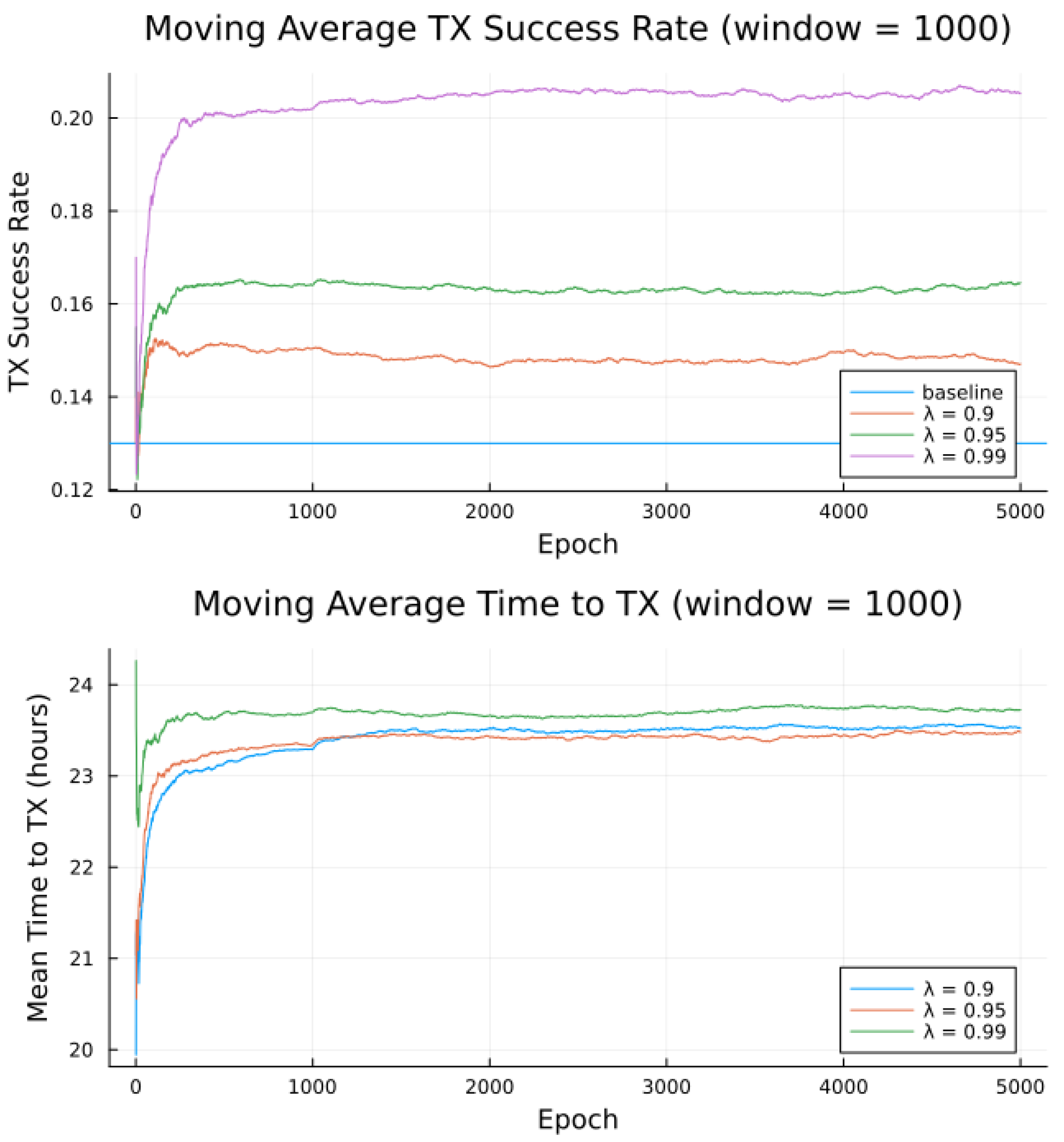
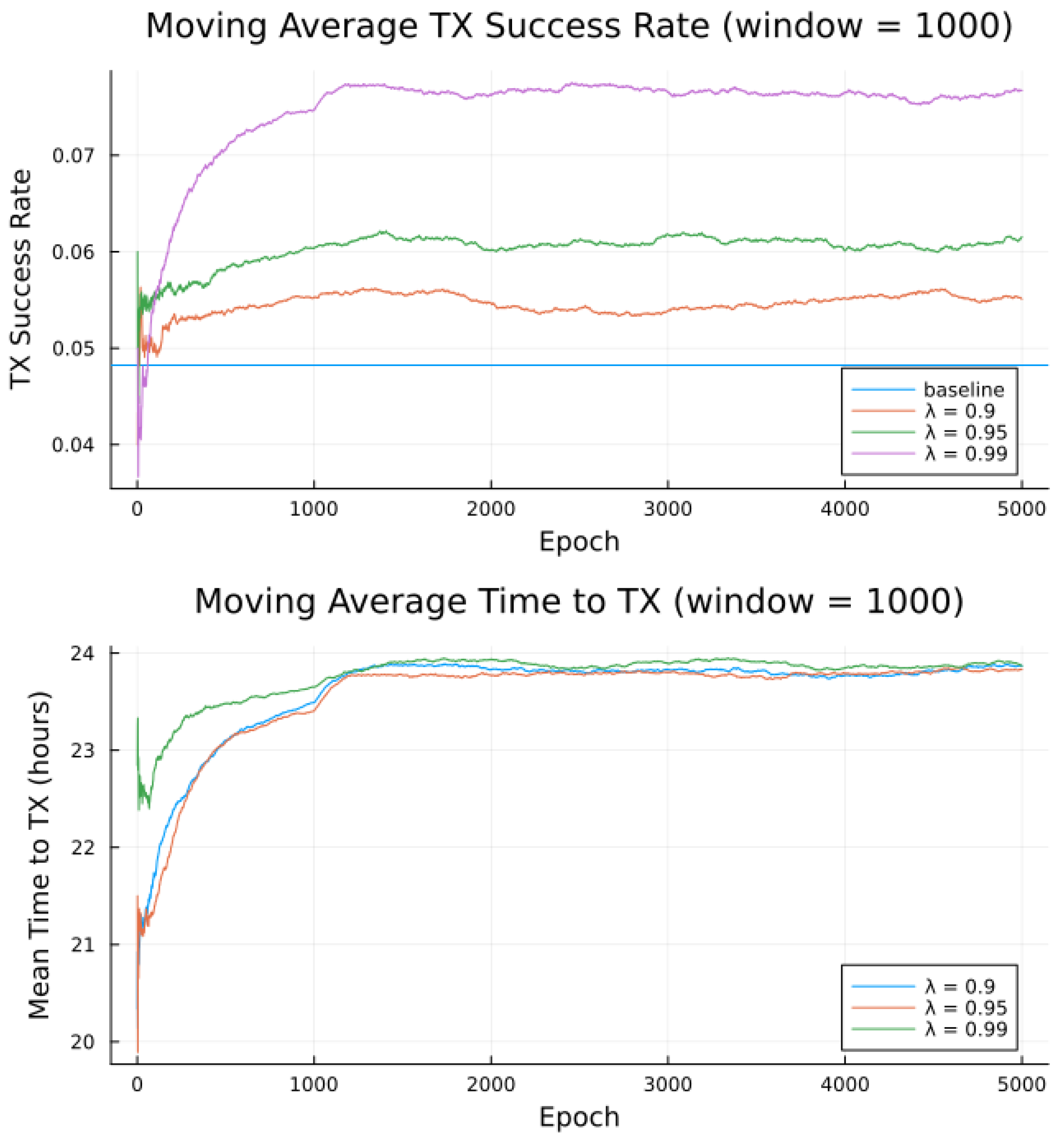
2.6. Simulation Model for Online Learning Evaluation
Setting up a number of sensors in the representative environment is expensive in time and money. Instead, the algorithm is tested with a simulated environment, similar to the methodology chosen in previous work on indirect-to-satellite scheduling [
11]. Using simulations first can demonstrate the ability of the algorithm to learn underlying unknown patterns about satellite pass qualityand tune the discount factor
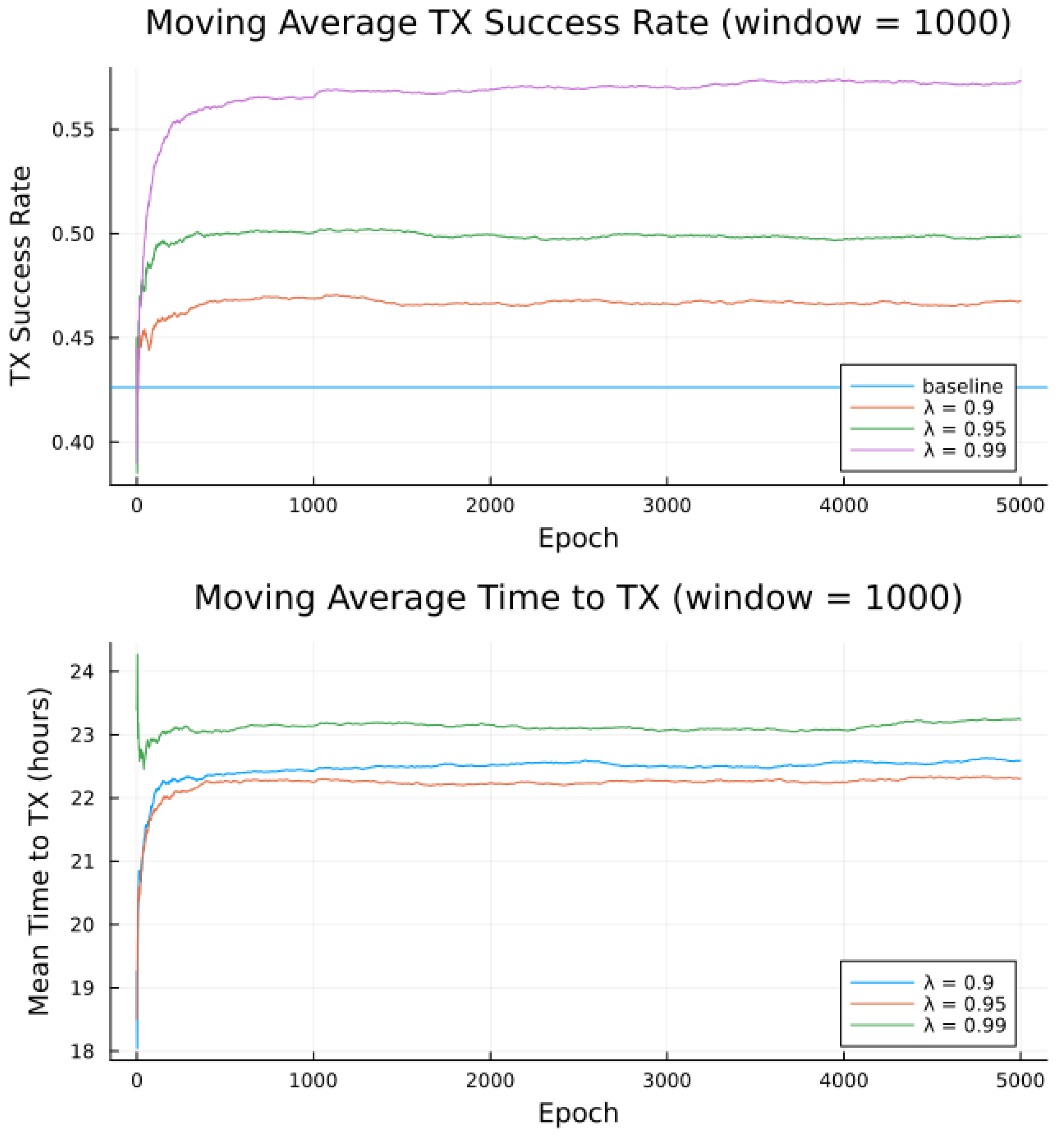
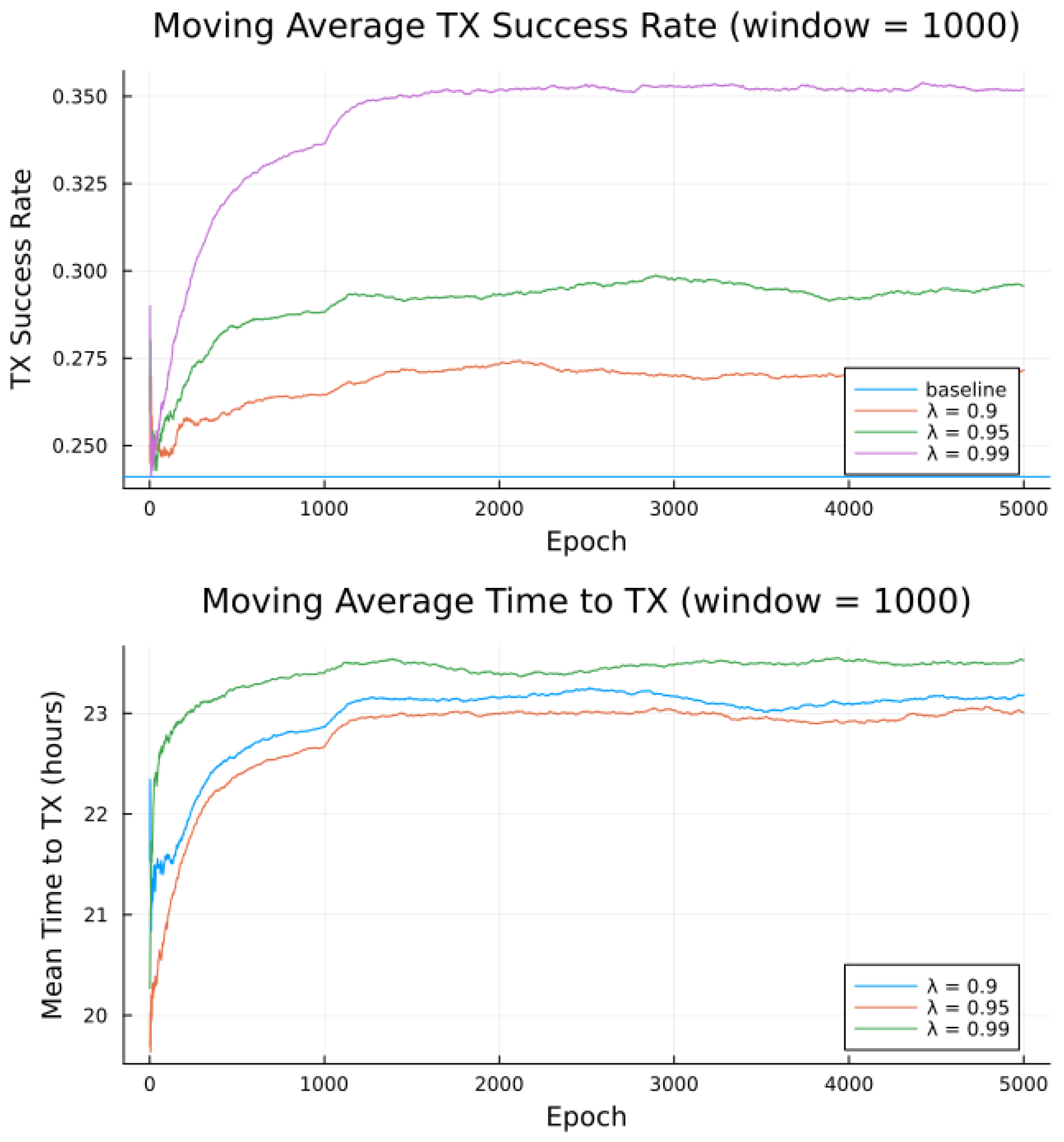
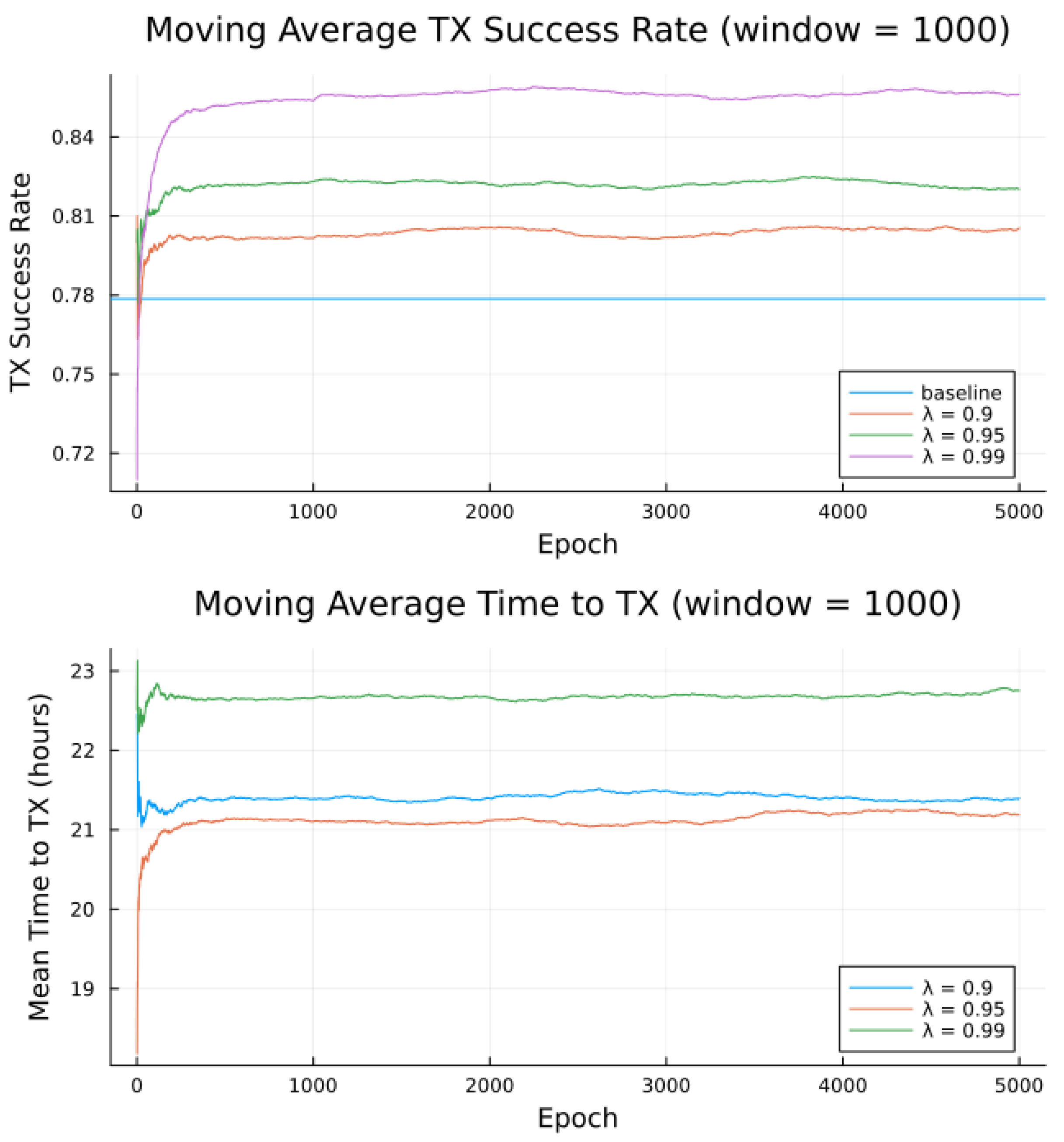
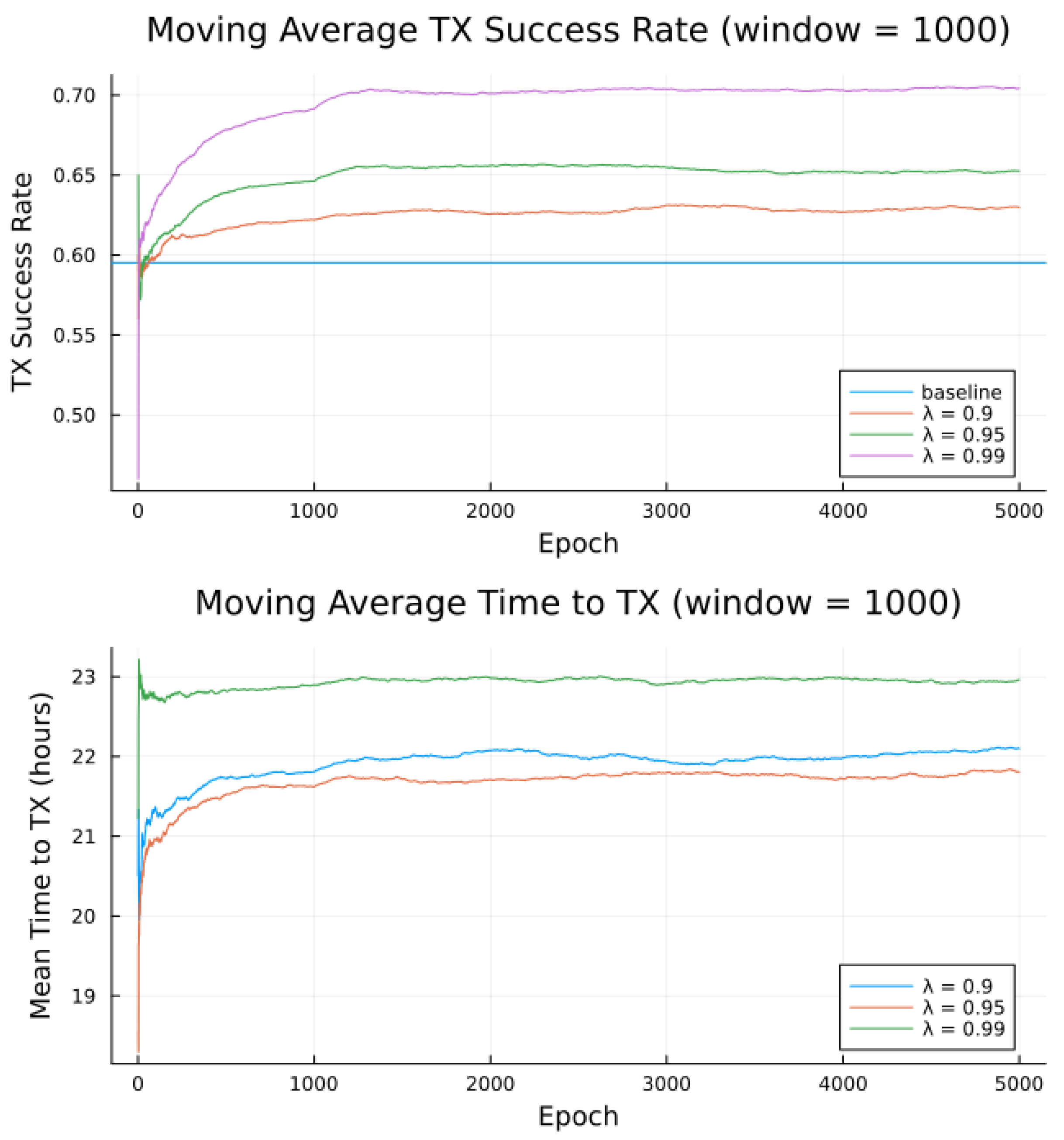
parameter. To simulate the algorithm, two key components are needed: (1) virtual transmitters with an underlying probability model for which pass qualities are likely to result in transmission, and (2) randomly generated satellite pass characteristics and RF noise data. For virtual transmitters, three conceptual preference models were created,
Table 5, to see how different transmitting obstacles would affect the algorithm. Note that the preferences in
Table 5 refer to the conditions required for a high likelihood of success. For example, the first preference model requires high angles, long durations, and low noise for a high likelihood of success.
To create the virtual transmitter models, a function is constructed that outputs a transmission success probability by multiplying three stretched-and-shifted sigmoid (theshold activation) curves, one for each of three preference variables from
Table 5. For example, the sigmoid to represent a preference for high angles would produce a value close to 1 for high angles (e.g., 70 degrees and higher) but a value close to 0 for low angles (e.g., 30 degrees and lower). The general form of the preference models is shown in Equation (
9).
where
represents the sigmoid function,
represents the max elevation angle,
d represents the pass duration, and
represents the RF background noise. Note that
,
,
,
,
, and
represent configurable stretching and threshold shifting constants to represent the different conceptual preference models. The values of these constants used to create the three preference models by Equation (
9) are shown in
Table 6.
Simulated satellite passes are presented to virtual transmitters by agents imbued with a preference model and a value function approximator. The generated pass characteristics are randomly generated: each agent is exposed to random RF background noise, a vector of satellite passes with corresponding random midpoint times , and random pass characteristics (except each also includes the RF noise value). The randomly generated pass characteristics are drawn from a uniform distribution, and the RF background noise values are drawn from two differing distributions:
to express that a given sensor may experience either a full range of RF noise, or (as expected in a remote location) a narrow sub-range of RF noise.
Each agent calculates the probabilities of selecting satellite passes from the discretized states, agents’ value function approximators, and the pass midpoints. These probabilities are calculated from the policy and satellite passes are chosen by these probabilities. Satellite pass and the RF noise characteristics are used by the agents’ preference models for transmission success probabilities. Finally, transmission successes are determined according to the agent preference model outputs, and the process repeats.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}