

Optimal Distributed Finite-Time Fusion Method for Multi-Sensor Networks under Dynamic Communication Weight


Abstract
:1. Introduction
1.1. Motivation and Related Work
1.2. Comparison and Main Contributions
- First, in contrast to references [12,13,14,15,18,26,27,28,29], which only consider fusion accuracy or the consistency of the fusion process without achieving rapid convergence of fusion errors and optimal estimation, this paper introduces fast finite-time convergence techniques and matrix weight fusion techniques. It achieves finite-time convergence of fusion errors (the maximum convergence iterations being the graph diameter) and optimal estimation in terms of minimum variance.
- Second, unlike [19,20,21,22,23,30] that are just concerned with the weight fusion of filtering results in the key step about the algorithm and do not focus on the communication weight settings in the fusion process or the dynamic correlation between the implementation weight and filtering results. In response to this, a dynamic communication weight generation technique called GIQ calculation is introduced to calculate bias of the current local fusion result in real-time. This technique is used to represent the local filtering effect.
- Last but not least, unlike most studies which only validate the proposed algorithm through simulations, this paper verifies the feasibility and execution accuracy of the proposed optimal distributed finite-time convergence fusion algorithm through both numerical simulations and experiments.
2. Preliminaries and Notations
2.1. Problem Statement
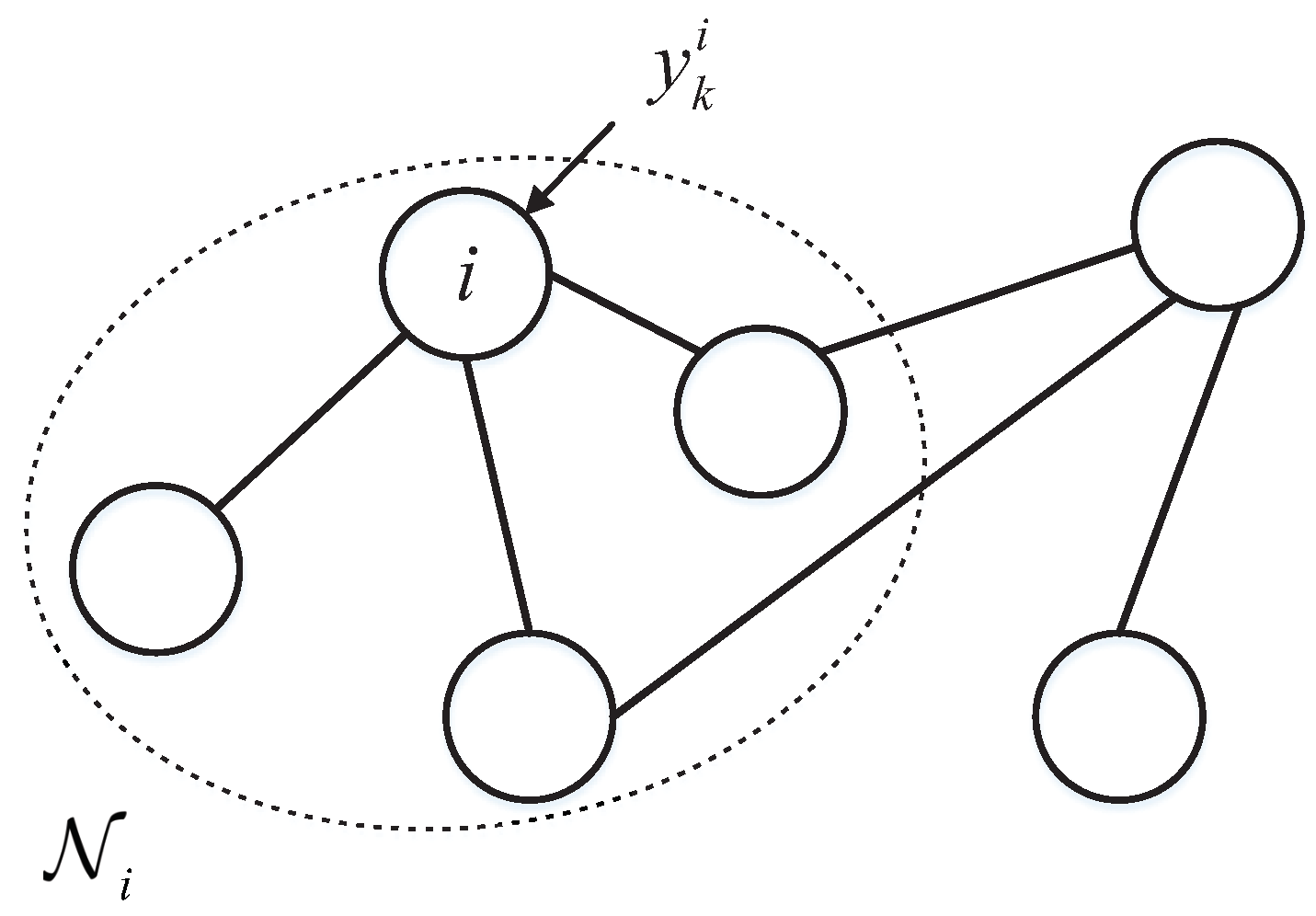
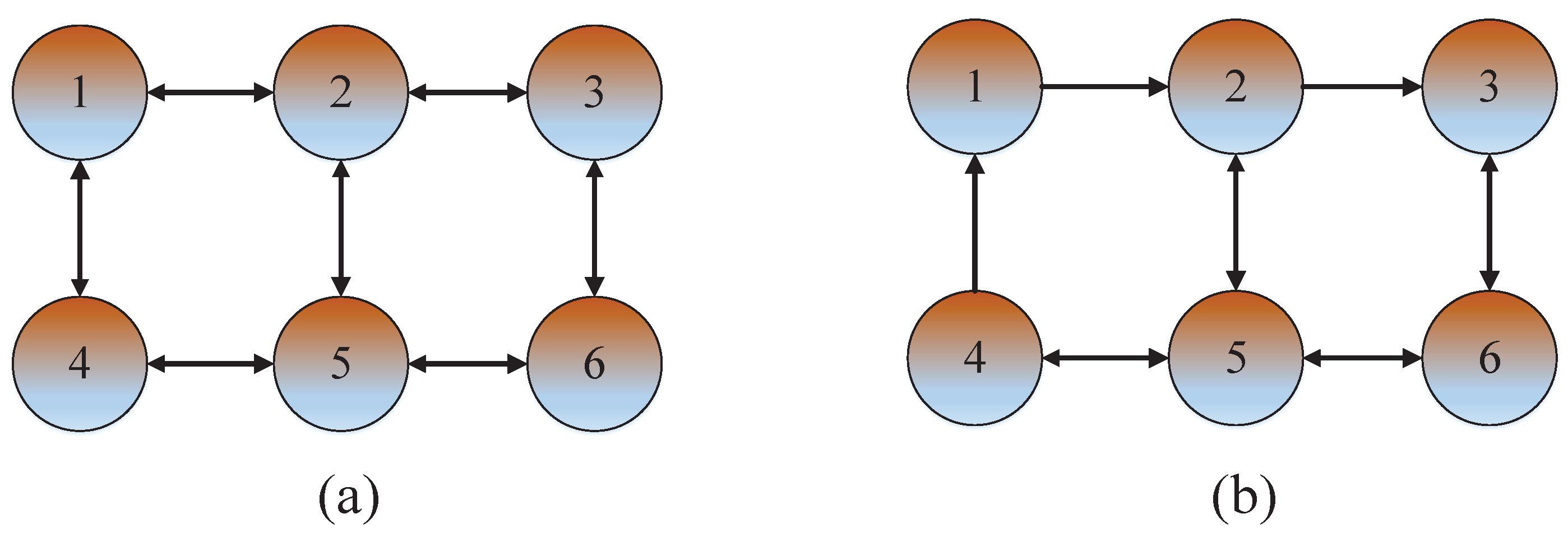
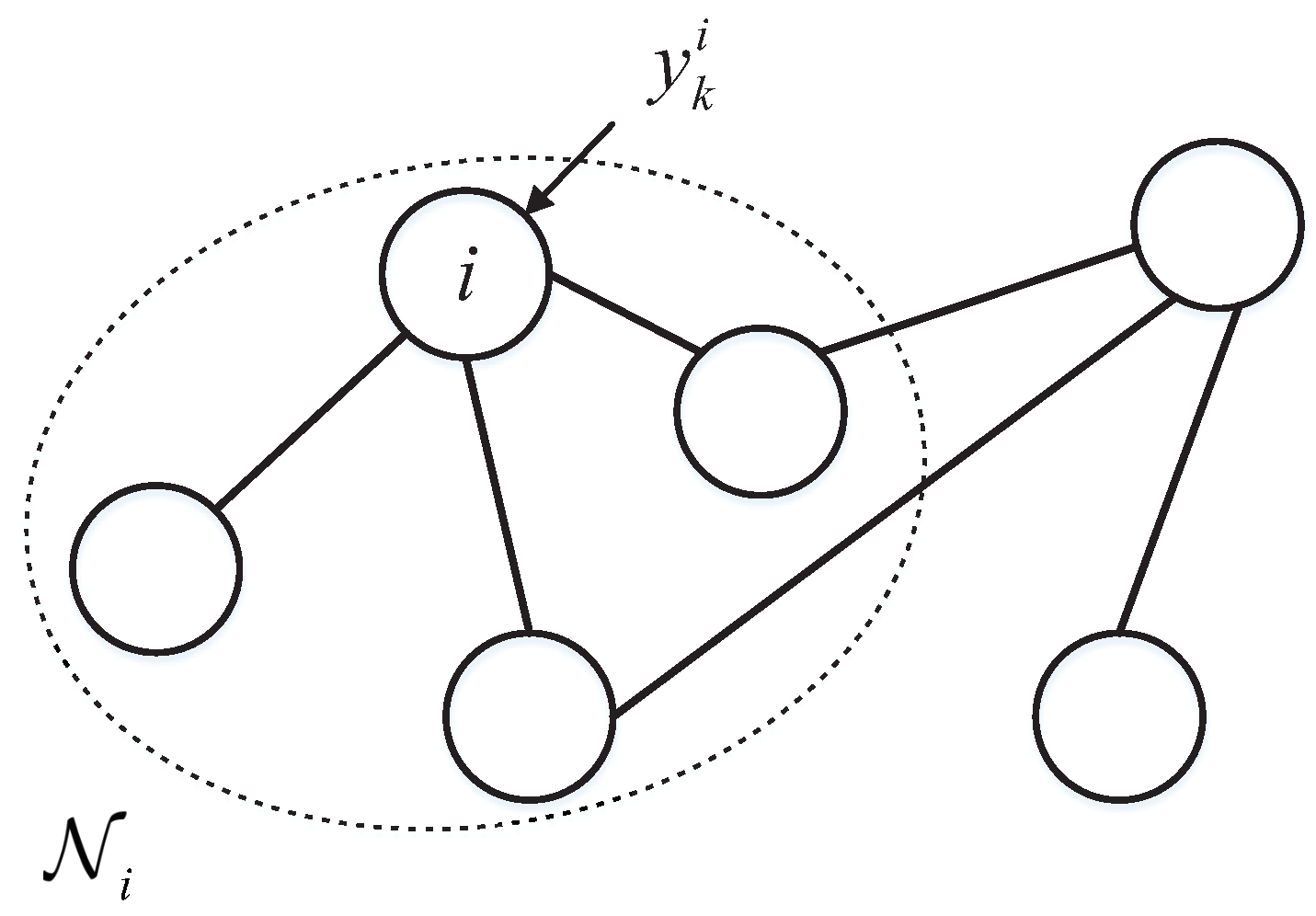
2.2. Communication Topology
2.3. Notations
3. Multi-Source Information Fusion Algorithm with Finite-Time Convergence
| Algorithm 1 Fusion Algorithm with Finite Time Convergence |
| Initialization: |
| Step 1: let and , calculate , . |
| Step 2: let , , . |
| Step 3: Transmit and to node j, where . |
| Main loop: |
| Step 4: Calculate communication weights |
| for After iteration , for each sensor i, and do |
| For each sensor ,
|
| end for |
| Step 5: Calculate and by |
| Step 6: Optimal weighted fusion |
| fordo |
| |
| end for |
4. Numerical Examples and Experiments
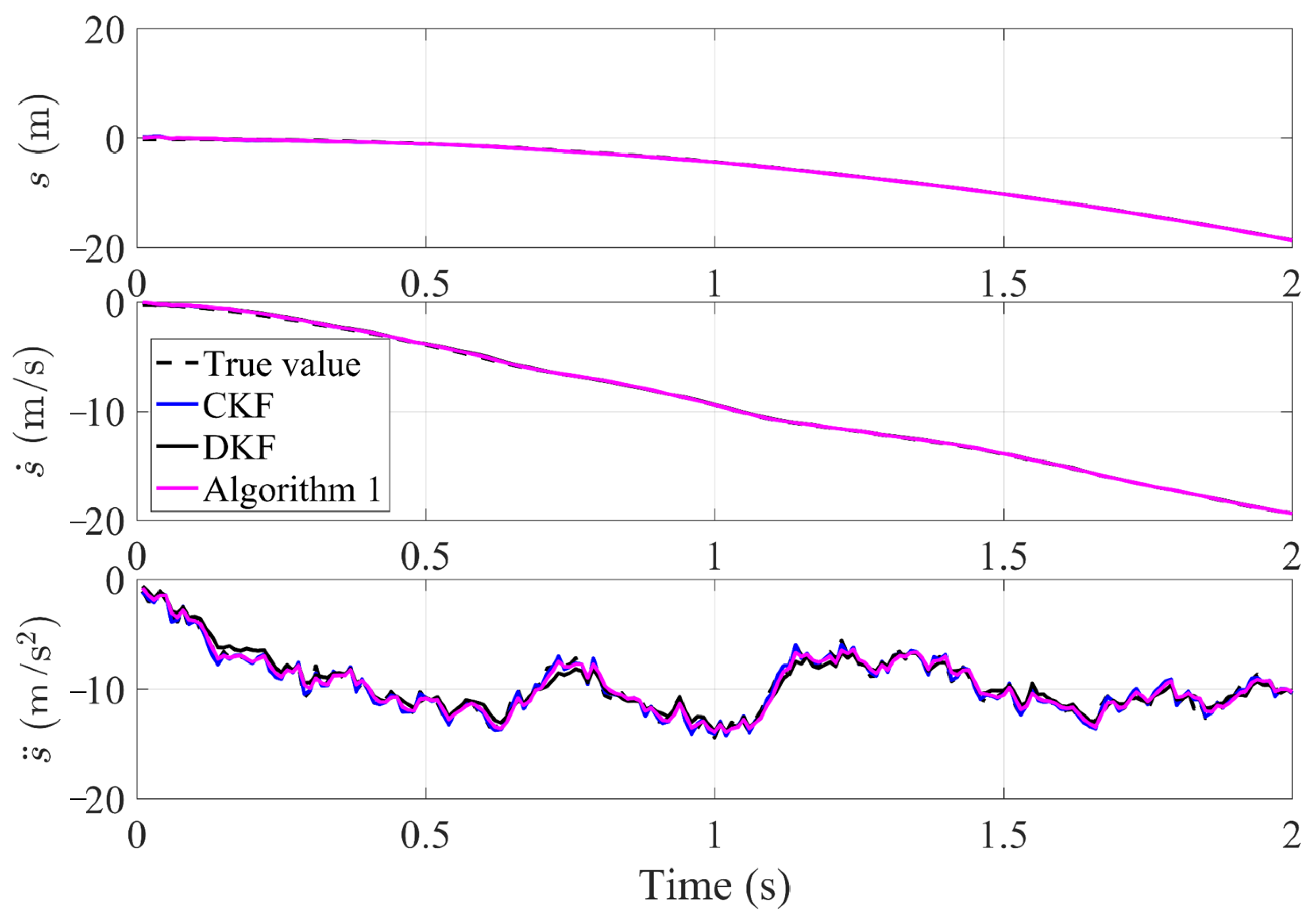
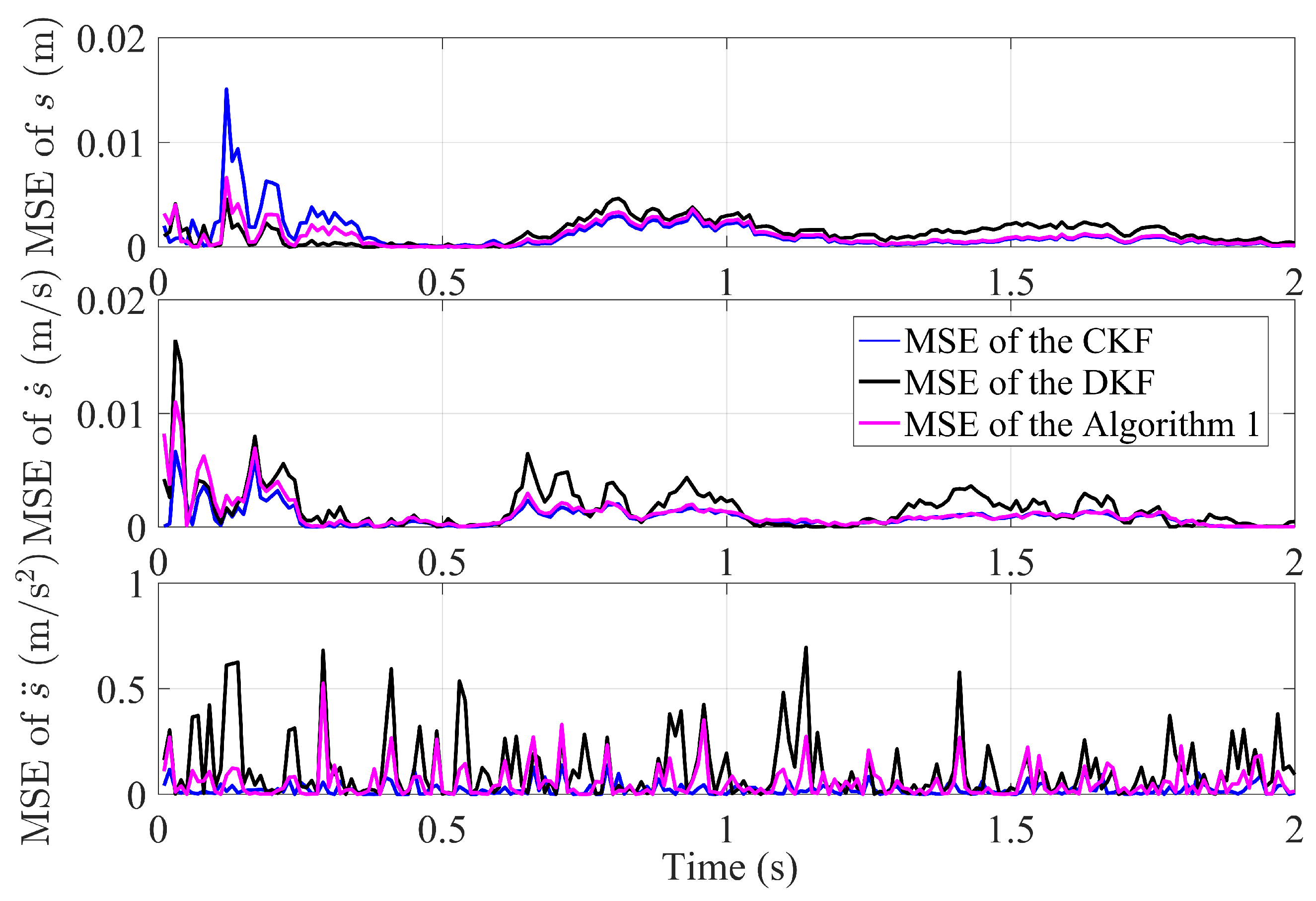
4.1. The Simulation of Fusion Algorithm with Finite Time Convergence
4.2. Experiments of Fusion Algorithm with Finite Time Convergence
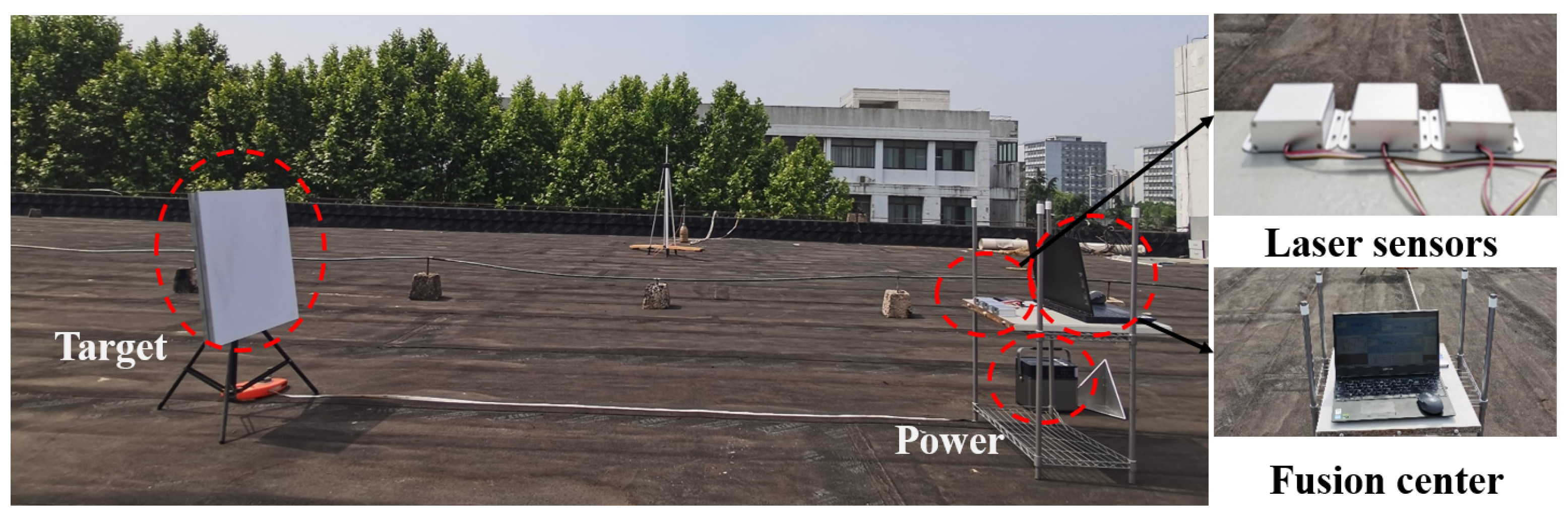
4.2.1. Static Target Testing
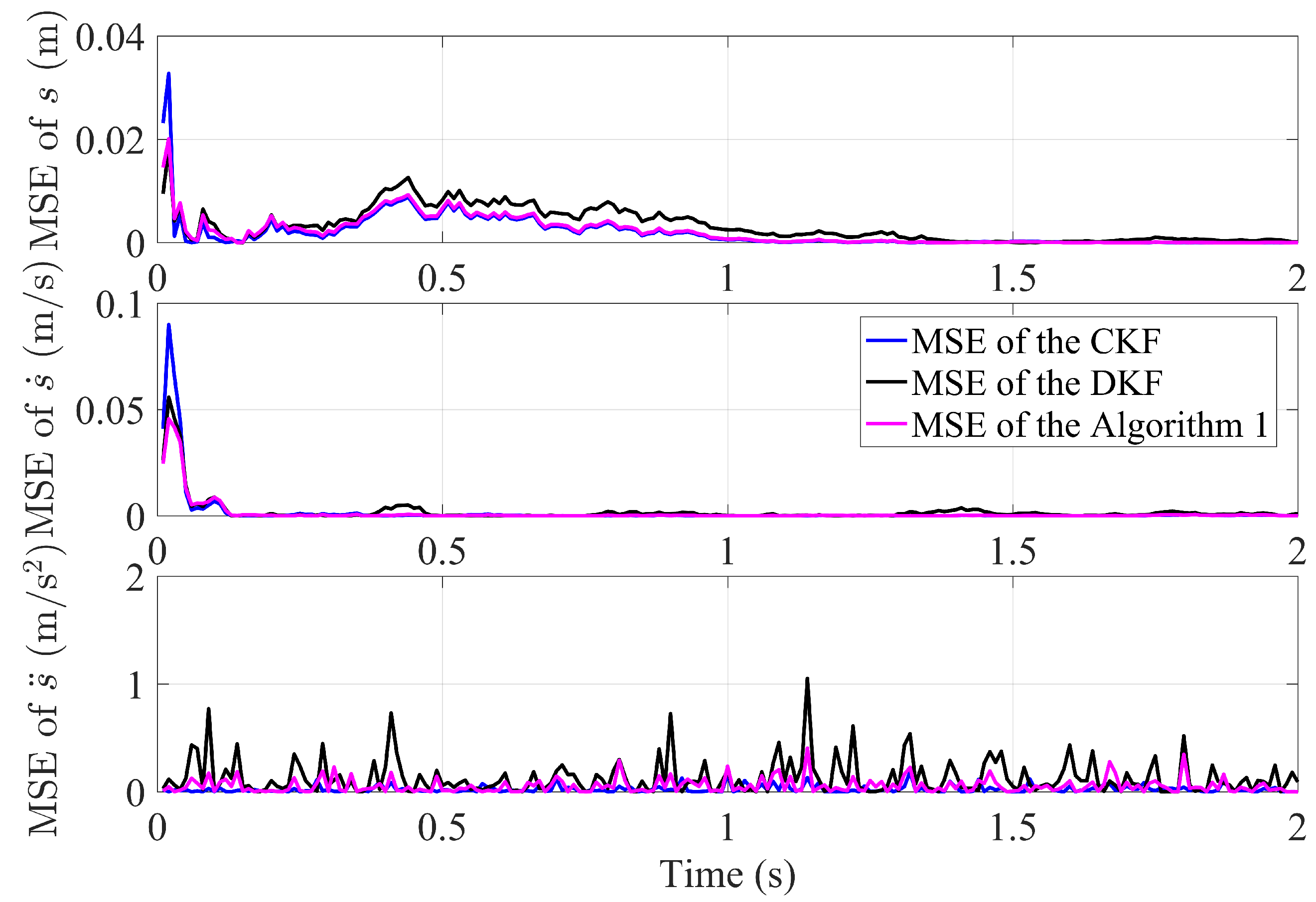
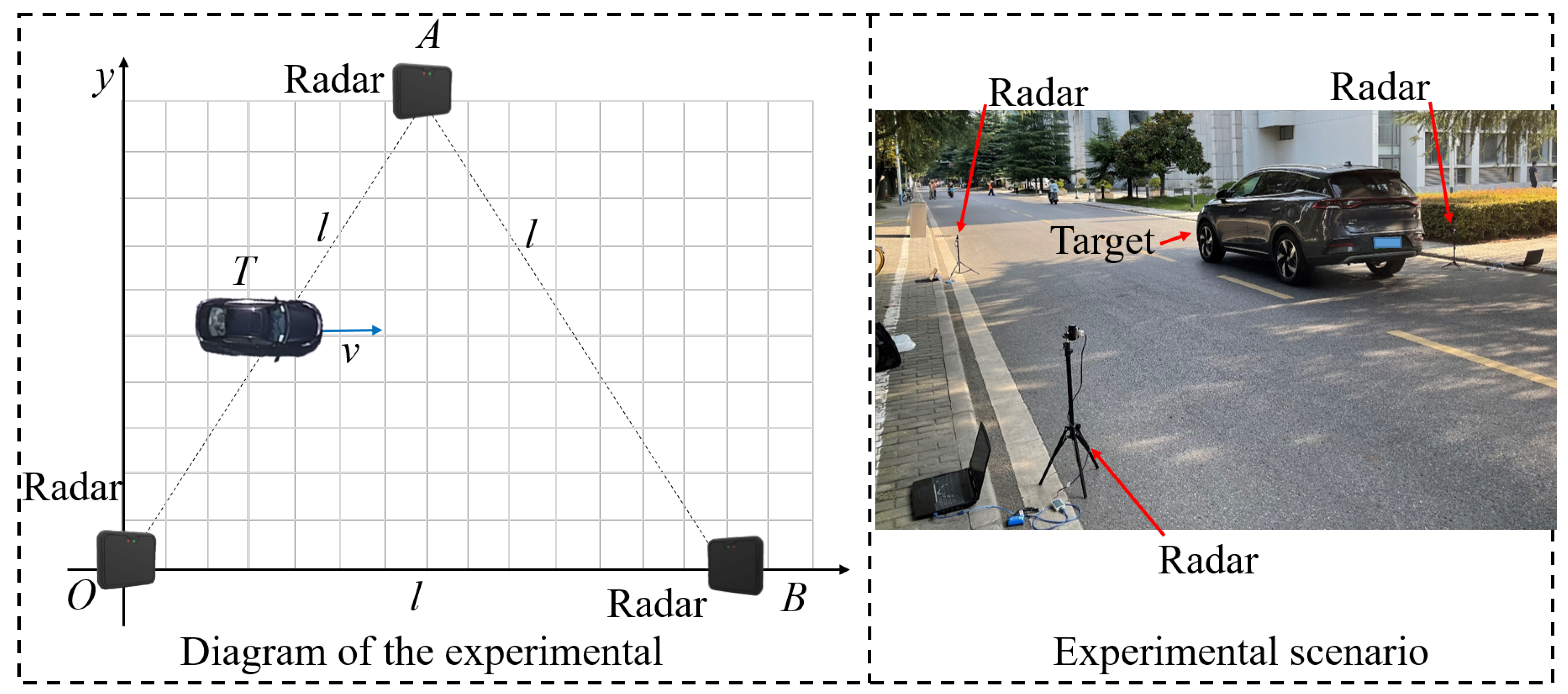
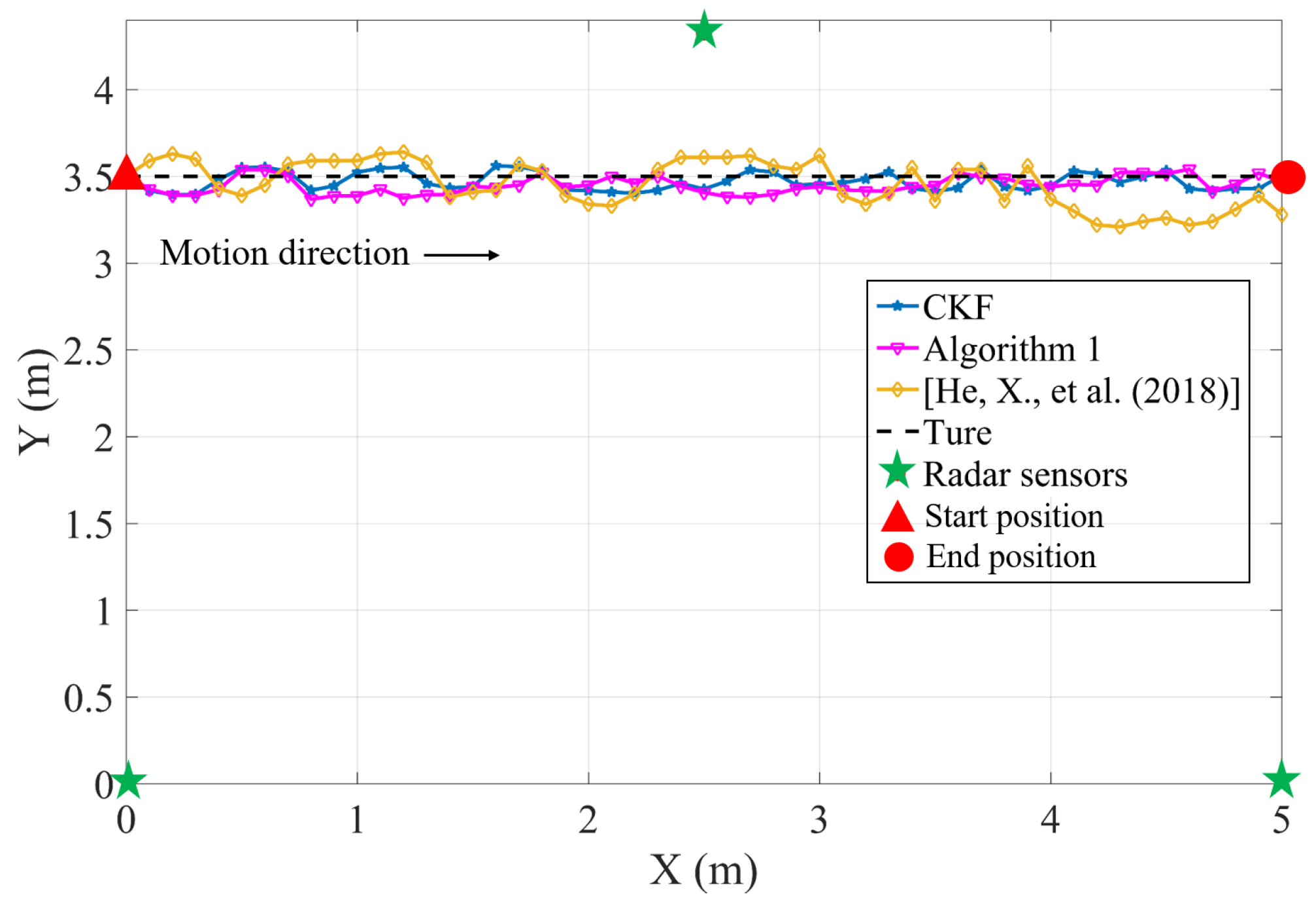
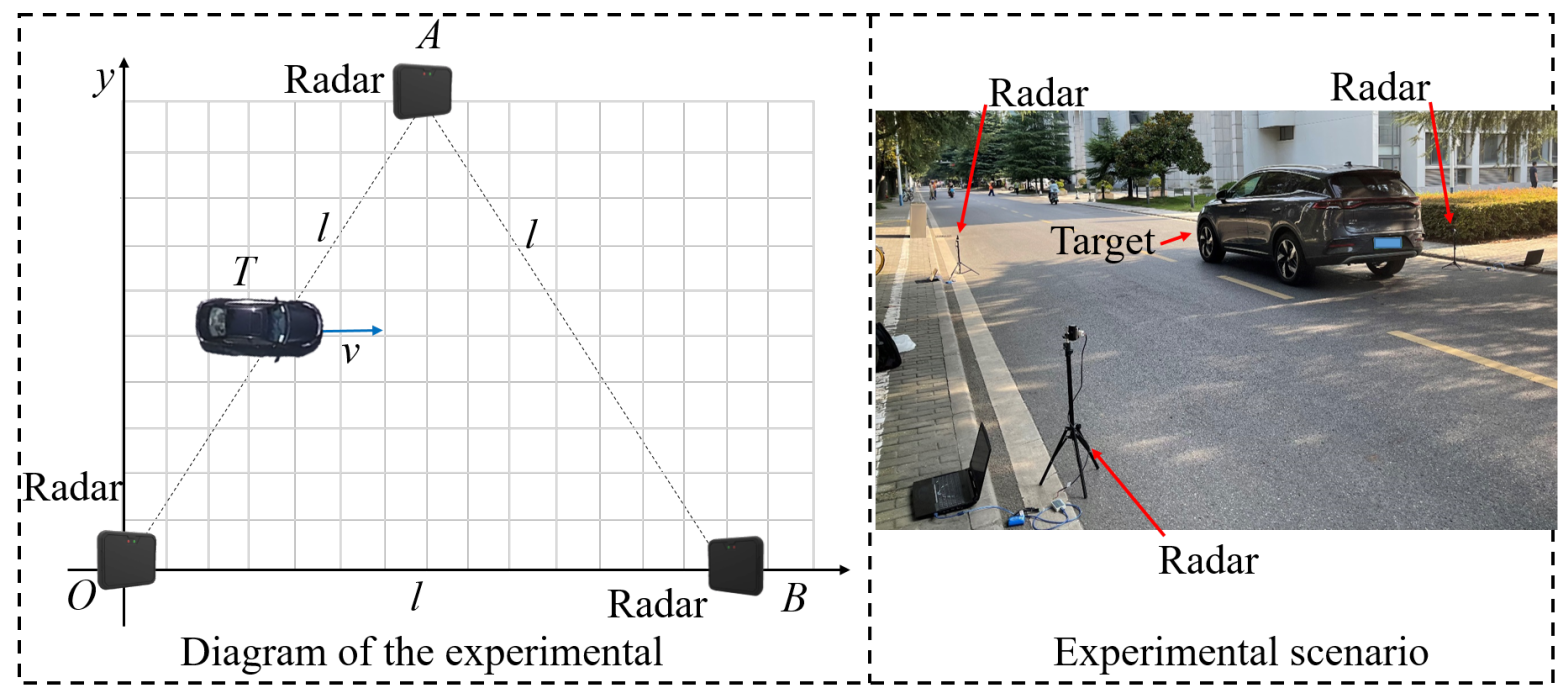
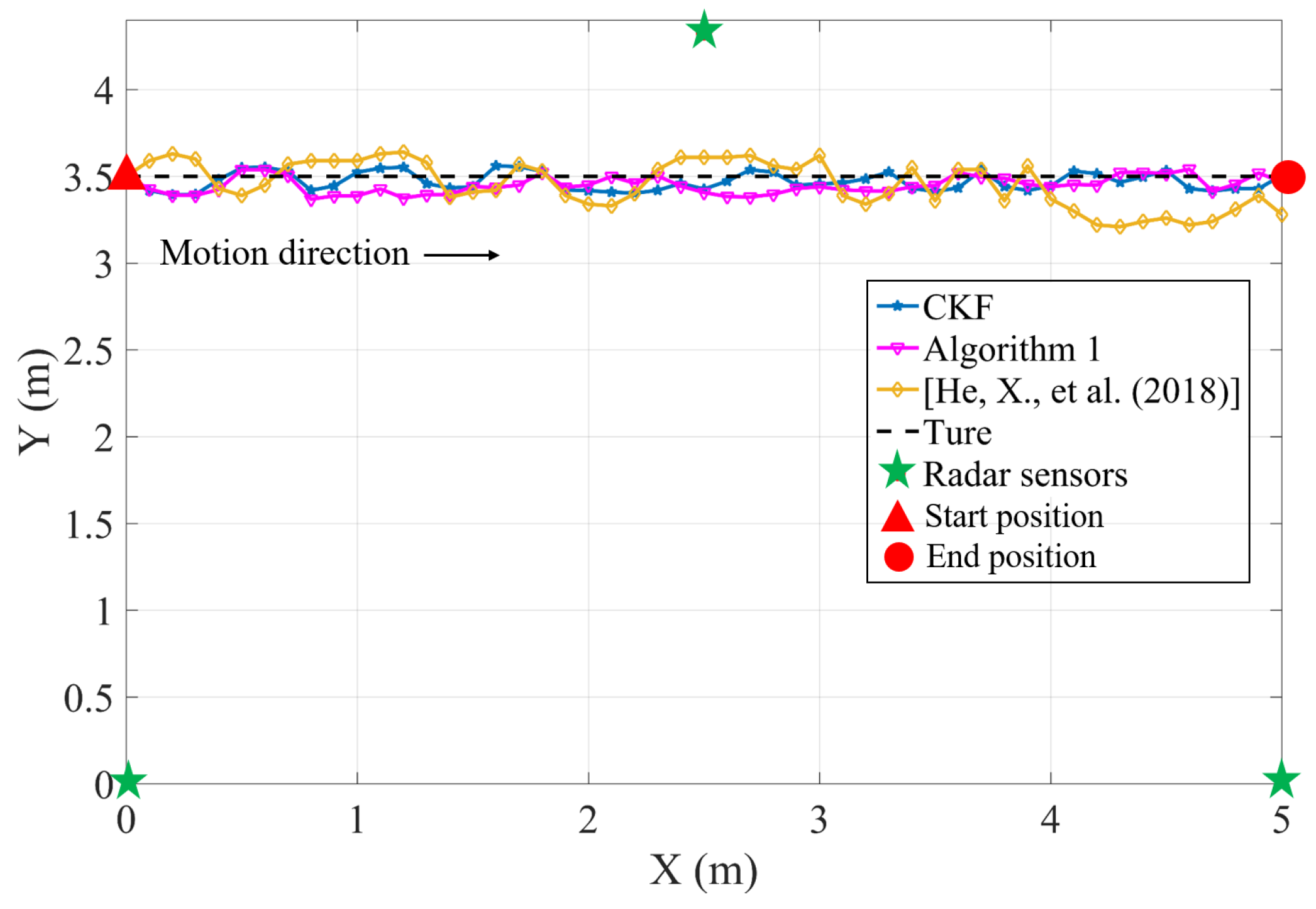
4.2.2. Mobile Target Testing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bates, H.; Pierce, M.; Benter, A. Real-time environmental monitoring for aquaculture using a LoRaWAN-based IoT sensor network. Sensors 2021, 21, 7963. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, L.; Cai, Y.; Ochiai, H. Sensor selection for maneuvering target tracking in wireless sensor networks with uncertainty. IEEE Sens. J. 2021, 22, 15071–15081. [Google Scholar] [CrossRef]
- Hasanujjaman, M.; Chowdhury, M.Z.; Jang, Y.M. Sensor fusion in autonomous vehicle with traffic surveillance camera system: Detection, localization, and AI networking. Sensors 2023, 23, 3335. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, F. A novel dynamic weight allocation method for multisource information fusion. Int. J. Intell. Syst. 2021, 36, 736–756. [Google Scholar] [CrossRef]
- Jin, L.; Mesiar, R.; Yager, R.; Qin, J. Dynamic weights allocation according to uncertain evaluation information. Int. J. Gen. Syst. 2019, 48, 33–47. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y. Bayesian entropy network for fusion of different types of information. Reliab. Eng. Syst. Saf. 2020, 195, 106747. [Google Scholar] [CrossRef]
- Wang, R.; Yi, X.; Yu, L.; Zhang, C.; Wang, T.; Zhang, X. Infrasound Source Localization of Distributed Stations Using Sparse Bayesian Learning and Bayesian Information Fusion. Remote Sens. 2022, 14, 3181. [Google Scholar] [CrossRef]
- Neaz, A.; Lee, E.H.; Jin, T.H.; Cho, K.C.; Nam, K. Optimizing Yarn Tension in Textile Production with Tension–Position Cascade Control Method Using Kalman Filter. Sensors 2023, 23, 5494. [Google Scholar] [CrossRef]
- Hoang, M.L.; Carratù, M.; Paciello, V.; Pietrosanto, A. Fusion Filters between the No Motion No Integration Technique and Kalman Filter in Noise Optimization on a 6DoF Drone for Orientation Tracking. Sensors 2023, 23, 5603. [Google Scholar] [CrossRef]
- Sun, S.L. Multi-sensor optimal information fusion Kalman filters with applications. Aerosp. Sci. Technol. 2004, 8, 57–62. [Google Scholar] [CrossRef]
- Carli, R.; Chiuso, A.; Schenato, L.; Zampieri, S. Distributed Kalman filtering using consensus strategies. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 5486–5491. [Google Scholar]
- Zhou, Z.; Fang, H.; Hong, Y. Distributed estimation for moving target based on state-consensus strategy. IEEE Trans. Autom. Control 2013, 58, 2096–2101. [Google Scholar] [CrossRef]
- Song, H.; Yu, L.; Zhang, W.A. Distributed consensus-based Kalman filtering in sensor networks with quantised communications and random sensor failures. IET Signal Process. 2014, 8, 107–118. [Google Scholar] [CrossRef]
- Das, S.; Moura, J.M. Distributed Kalman filtering with dynamic observations consensus. IEEE Trans. Signal Process. 2015, 63, 4458–4473. [Google Scholar] [CrossRef]
- Liu, P.; Tian, Y.P.; Zhang, Y. Distributed Kalman filtering with finite-time max-consensus protocol. IEEE Access 2018, 6, 10795–10802. [Google Scholar] [CrossRef]
- Di Paola, D.; Petitti, A.; Rizzo, A. Distributed Kalman filtering via node selection in heterogeneous sensor networks. Int. J. Syst. Sci. 2015, 46, 2572–2583. [Google Scholar] [CrossRef]
- Thia, J.; Yuan, Y.; Shi, L.; Gonçalves, J. Distributed Kalman Filter with minimum-time covariance computation. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1995–2000. [Google Scholar]
- Wu, Z.; Fu, M.; Xu, Y.; Lu, R. A distributed Kalman filtering algorithm with fast finite-time convergence for sensor networks. Automatica 2018, 95, 63–72. [Google Scholar] [CrossRef]
- Yin, H.; Li, D.; Wang, Y.; Hong, X. Adaptive Data Fusion Method of Multisensors Based on LSTM-GWFA Hybrid Model for Tracking Dynamic Targets. Sensors 2022, 22, 5800. [Google Scholar] [CrossRef]
- Liang, S.; Ma, M.; He, S.; Zhang, H. Short-term passenger flow prediction in urban public transport: Kalman filtering combined k-nearest neighbor approach. IEEE Access 2019, 7, 120937–120949. [Google Scholar] [CrossRef]
- Yang, Y.H.; Shi, Y. Application of improved BP neural network in information fusion Kalman filter. Circuits Syst. Signal Process. 2020, 39, 4890–4902. [Google Scholar] [CrossRef]
- Zhao, S.; Shmaliy, Y.S.; Shi, P.; Ahn, C.K. Fusion Kalman/UFIR filter for state estimation with uncertain parameters and noise statistics. IEEE Trans. Ind. Electron. 2016, 64, 3075–3083. [Google Scholar] [CrossRef]
- Zhu, K.; Wang, Z.; Han, Q.L.; Wei, G. Distributed set-membership fusion filtering for nonlinear 2-D systems over sensor networks: An encoding–decoding scheme. IEEE Trans. Cybern. 2021, 53, 416–427. [Google Scholar] [CrossRef]
- Hashemipour, H.R.; Roy, S.; Laub, A.J. Decentralized structures for parallel Kalman filtering. IEEE Trans. Autom. Control 1988, 33, 88–94. [Google Scholar] [CrossRef]
- Sun, S.L.; Deng, Z.L. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Wang, K.; Chen, C.M.; Liang, Z.; Hassan, M.M.; Sarne, G.M.; Fotia, L.; Fortino, G. A trusted consensus fusion scheme for decentralized collaborated learning in massive IoT domain. Inf. Fusion 2021, 72, 100–109. [Google Scholar] [CrossRef]
- Liu, P.; Zhou, S.; Zhang, P.; Li, M. Distributed State Fusion Estimation of Multi-Source Localization Nonlinear Systems. Sensors 2023, 23, 698. [Google Scholar] [CrossRef]
- Hu, C.; Chen, B. An efficient distributed Kalman filter over sensor networks with maximum correntropy criterion. IEEE Trans. Signal Inf. Process. Netw. 2022, 8, 433–444. [Google Scholar] [CrossRef]
- Feng, Z.; Wang, G.; Peng, B.; He, J.; Zhang, K. Distributed minimum error entropy Kalman Filter. Inf. Fusion 2023, 91, 556–565. [Google Scholar] [CrossRef]
- Yu, H.; Dai, K.; Li, H.; Zou, Y.; Ma, X.; Ma, S.; Zhang, H. Distributed cooperative guidance law for multiple missiles with input delay and topology switching. J. Frankl. Inst. 2021, 358, 9061–9085. [Google Scholar] [CrossRef]
- Yu, H.; Dai, K.; Li, H.; Zou, Y.; Ma, X.; Ma, S.; Zhang, H. Three-dimensional adaptive fixed-time cooperative guidance law with impact time and angle constraints. Aerosp. Sci. Technol. 2022, 123, 107450. [Google Scholar] [CrossRef]
- Yager, R.R.; Petry, F. An intelligent quality-based approach to fusing multi-source probabilistic information. Inf. Fusion 2016, 31, 127–136. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, F. Aggregation of uncertainty data based on ordered weighting aggregation and generalized information quality. Int. J. Intell. Syst. 2019, 34, 1653–1666. [Google Scholar] [CrossRef]
- He, X.; Xue, W.; Fang, H. Consistent distributed state estimation with global observability over sensor network. Automatica 2018, 92, 162–172. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | The Main Pros | The Main Cons |
|---|---|---|
| CKF [10,24] | High fusion accuracy | Poor robustness |
| DKF [25] | Strong trade-off between robustness and plasticity | Fusion accuracy is lower than CKF |
| Average-DKF [11,12] | Convergence of fusion result error | The number of iterations for convergence is unknown |
| finite-time DKF [15,18] | The number of iterations for convergence is known | The information interaction process is not dynamically correlated with the fusion process |
| Weight-DKF [19,20] | Dynamic fusion weights | Weight settings only focus on the final fusion process |
| Sensors | Distance/m | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 5 | 10 | 20 | ||
| Sensor measurement data/m | Sensor 1 | 1.014 | 1.996 | 4.964 | 9.983 | 19.970 |
| 0.988 | 2.001 | 5.020 | 10.011 | 19.964 | ||
| 1.014 | 1.988 | 4.974 | 9.984 | 20.172 | ||
| 1.086 | 2.082 | 4.975 | 9.981 | 19.968 | ||
| 0.990 | 1.990 | 5.004 | 10.029 | 20.066 | ||
| Sensor 2 | 0.988 | 2.025 | 4.979 | 10.011 | 19.977 | |
| 1.069 | 2.087 | 5.069 | 9.959 | 20.043 | ||
| 1.087 | 1.990 | 4.970 | 9.965 | 19.979 | ||
| 0.973 | 1.979 | 4.977 | 10.091 | 20.082 | ||
| 1.070 | 2.041 | 5.037 | 9.979 | 20.021 | ||
| Sensor 3 | 0.981 | 1.992 | 5.011 | 9.943 | 19.941 | |
| 0.985 | 2.012 | 4.987 | 10.012 | 20.058 | ||
| 1.047 | 1.982 | 5.006 | 9.938 | 20.029 | ||
| 0.985 | 1.987 | 4.974 | 10.042 | 19.927 | ||
| 1.082 | 2.010 | 4.981 | 9.941 | 20.019 | ||
| Fusion result/m | 1.006 | 2.008 | 4.990 | 9.999 | 20.007 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Dai, K.; Li, Q.; Li, H.; Zhang, H. Optimal Distributed Finite-Time Fusion Method for Multi-Sensor Networks under Dynamic Communication Weight. Sensors 2023, 23, 7397. https://doi.org/10.3390/s23177397
Yu H, Dai K, Li Q, Li H, Zhang H. Optimal Distributed Finite-Time Fusion Method for Multi-Sensor Networks under Dynamic Communication Weight. Sensors. 2023; 23(17):7397. https://doi.org/10.3390/s23177397
Chicago/Turabian StyleYu, Hang, Keren Dai, Qingyu Li, Haojie Li, and He Zhang. 2023. "Optimal Distributed Finite-Time Fusion Method for Multi-Sensor Networks under Dynamic Communication Weight" Sensors 23, no. 17: 7397. https://doi.org/10.3390/s23177397
APA StyleYu, H., Dai, K., Li, Q., Li, H., & Zhang, H. (2023). Optimal Distributed Finite-Time Fusion Method for Multi-Sensor Networks under Dynamic Communication Weight. Sensors, 23(17), 7397. https://doi.org/10.3390/s23177397