
Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared

Abstract
:1. Introduction
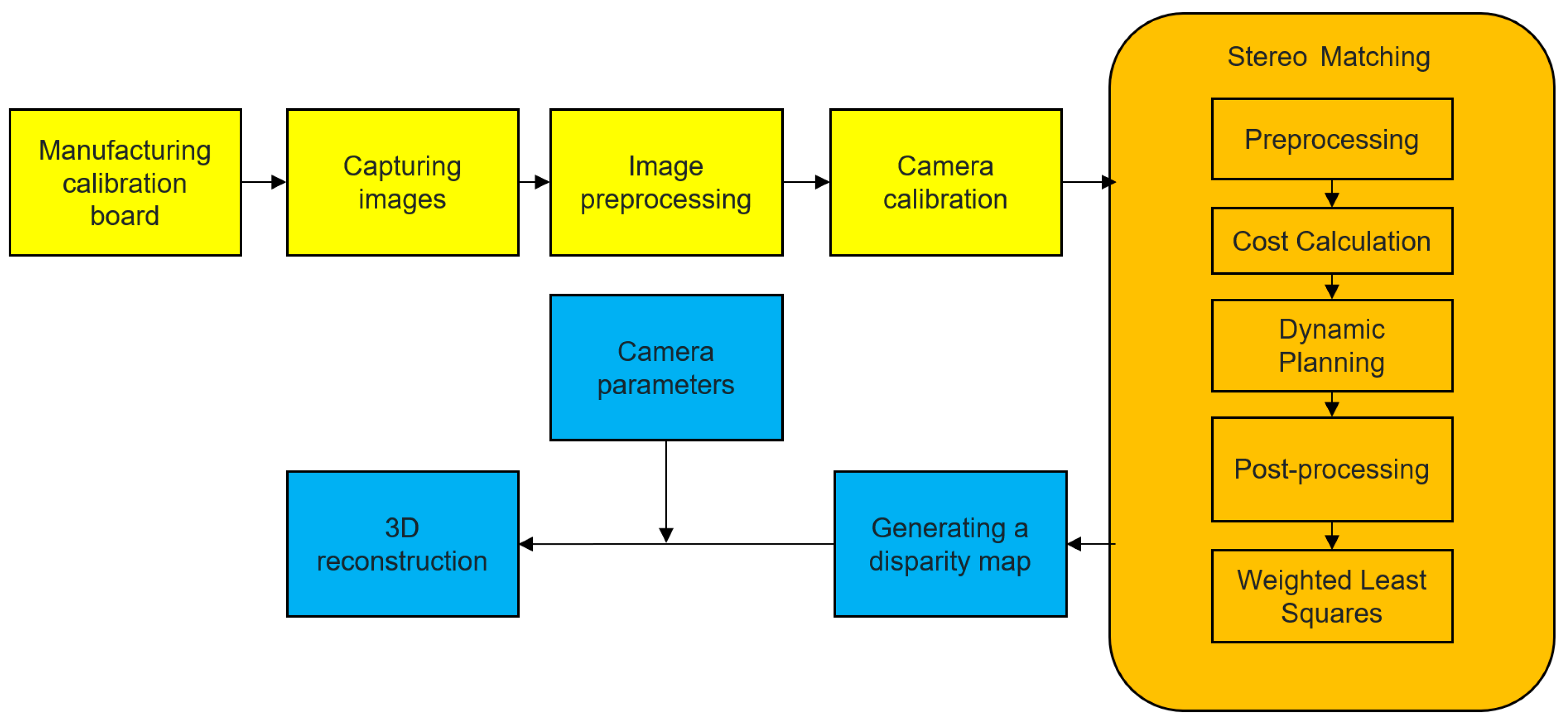
2. Materials and Methods
2.1. Image Preprocessing
- (1)
- Select a reference window: For each pixel to be filtered, a reference window is chosen, encompassing neighboring pixels around the target pixel. This reference window will be utilized to compute the filtered value of the pixel.
- (2)
- Calculate similarity weights: For each pixel to be filtered, similarity weights are computed between the target pixel and other pixels within the reference window. The similarity can be evaluated by measuring the Euclidean distance or grayscale difference between pixels. Pixels with smaller distances or smaller grayscale differences will receive higher similarity weights. One common method for similarity calculation is the Gaussian weighted function, computed as follows:where denotes the similarity between and . and are the pixel values of each pixel point within the baseline and similar blocks, respectively. is the Euclidean distance between the two-pixel blocks, and α is the standard deviation of the Gaussian kernel function. is the normalization factor, and h is the filter coefficient.
- (3)
- Calculate the filtered value: for each pixel , the denoised pixel value is obtained by calculating the weighted average in its set of similar pixels. The formula for is as follows:where is the noise-reduced image pixel and is the noisy image pixel. represents the pixels in the set of similar pixels .
- (4)
- Reconstructing the image: the original pixel points are reconstructed using the pixel values obtained from non-local averaging until all pixel points of the image have been updated.
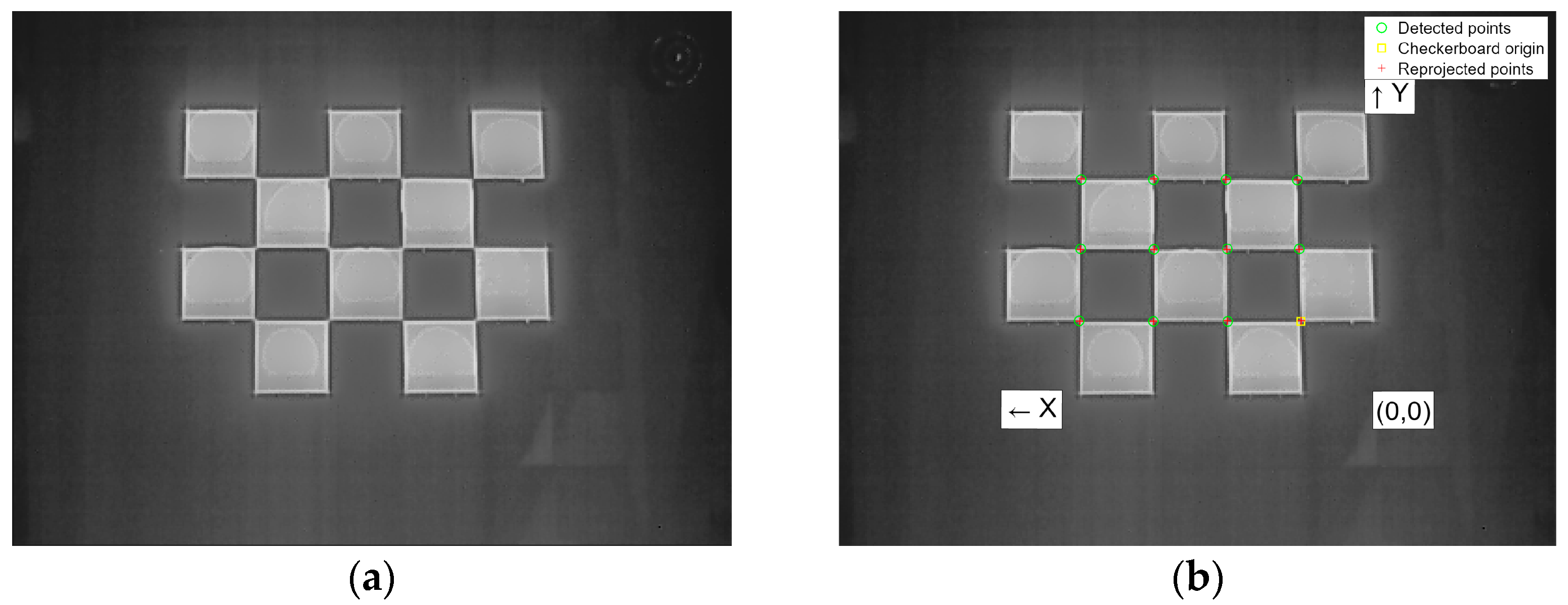
2.2. Camera Calibration
2.3. SGBM Algorithm
- (1)
- Preprocessing:
- (2)
- Cost Calculation
- (3)
- Dynamic Planning
- (4)
- Post-processing
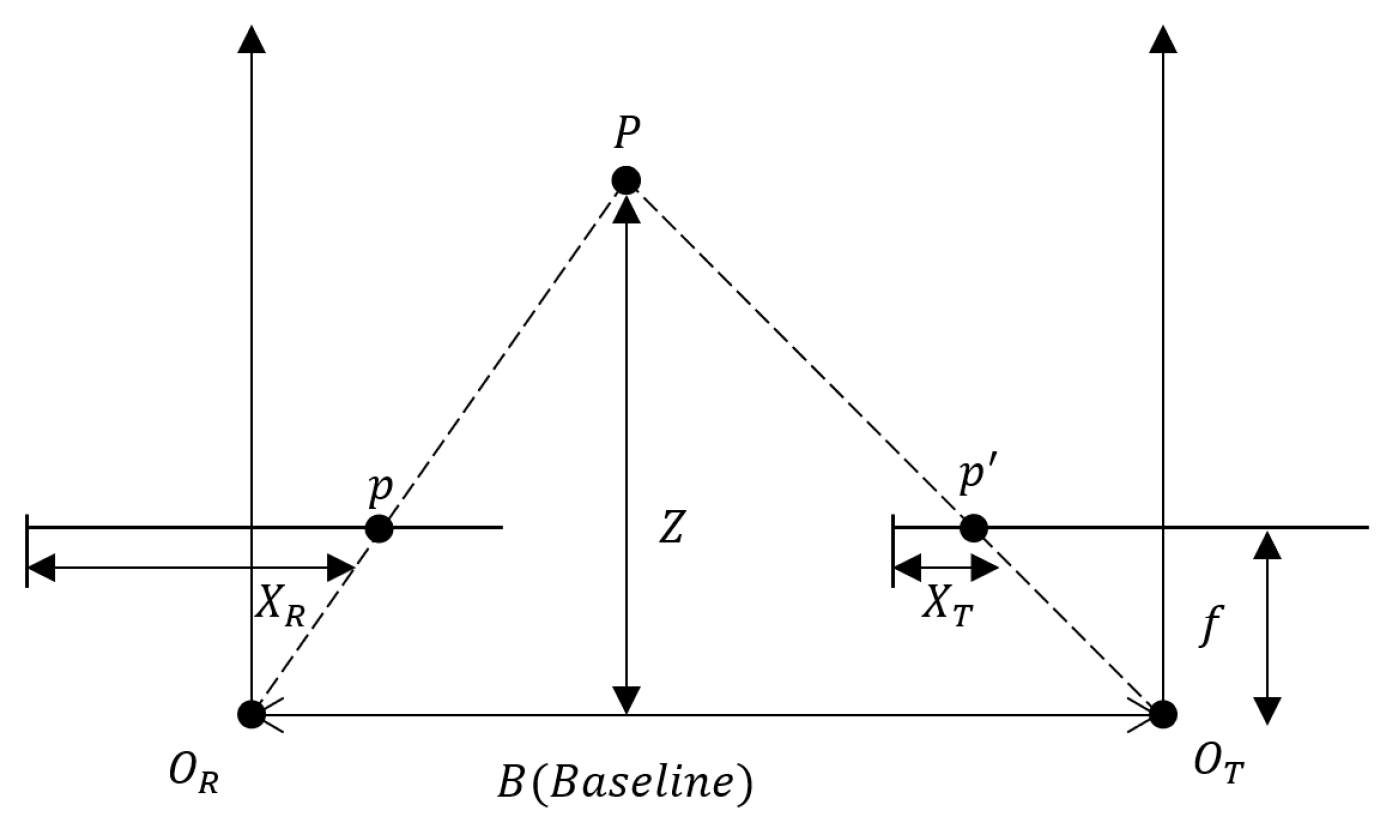
2.4. Principle of Three-Dimensional Reconstruction
3. Results
3.1. Image Preprocessing Experiments
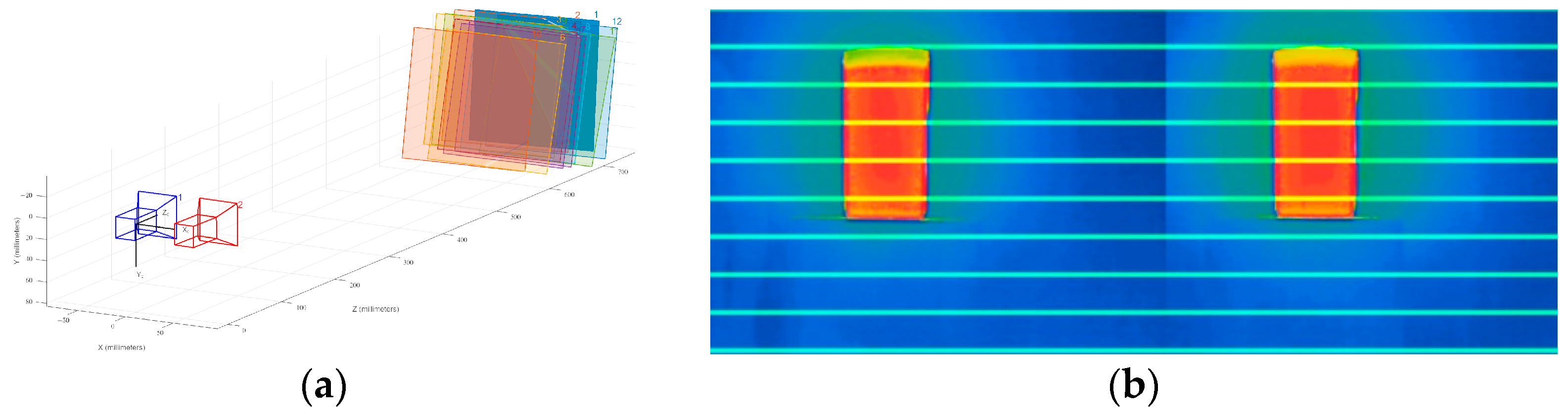
3.2. Camera Calibration Experiment
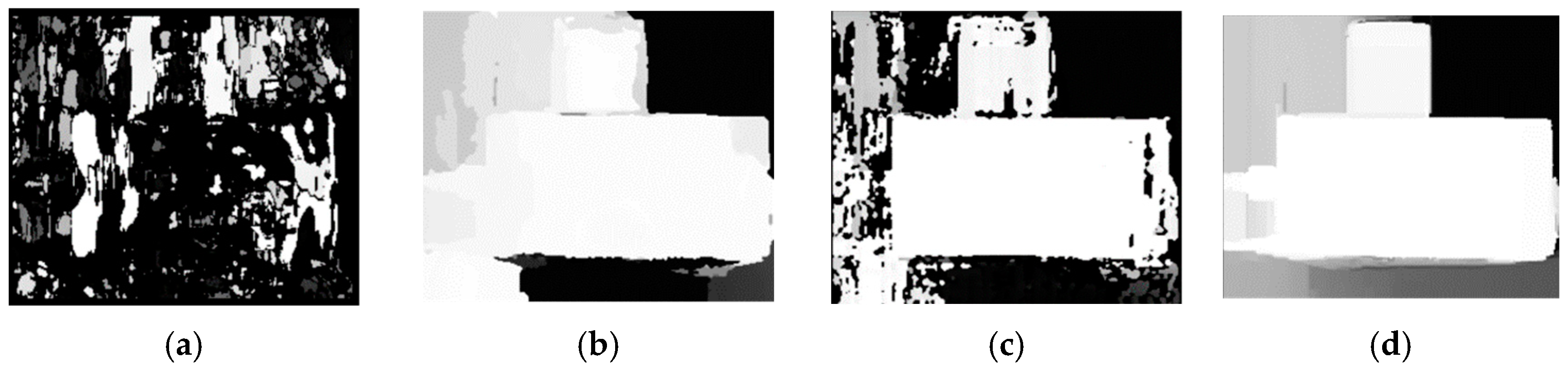
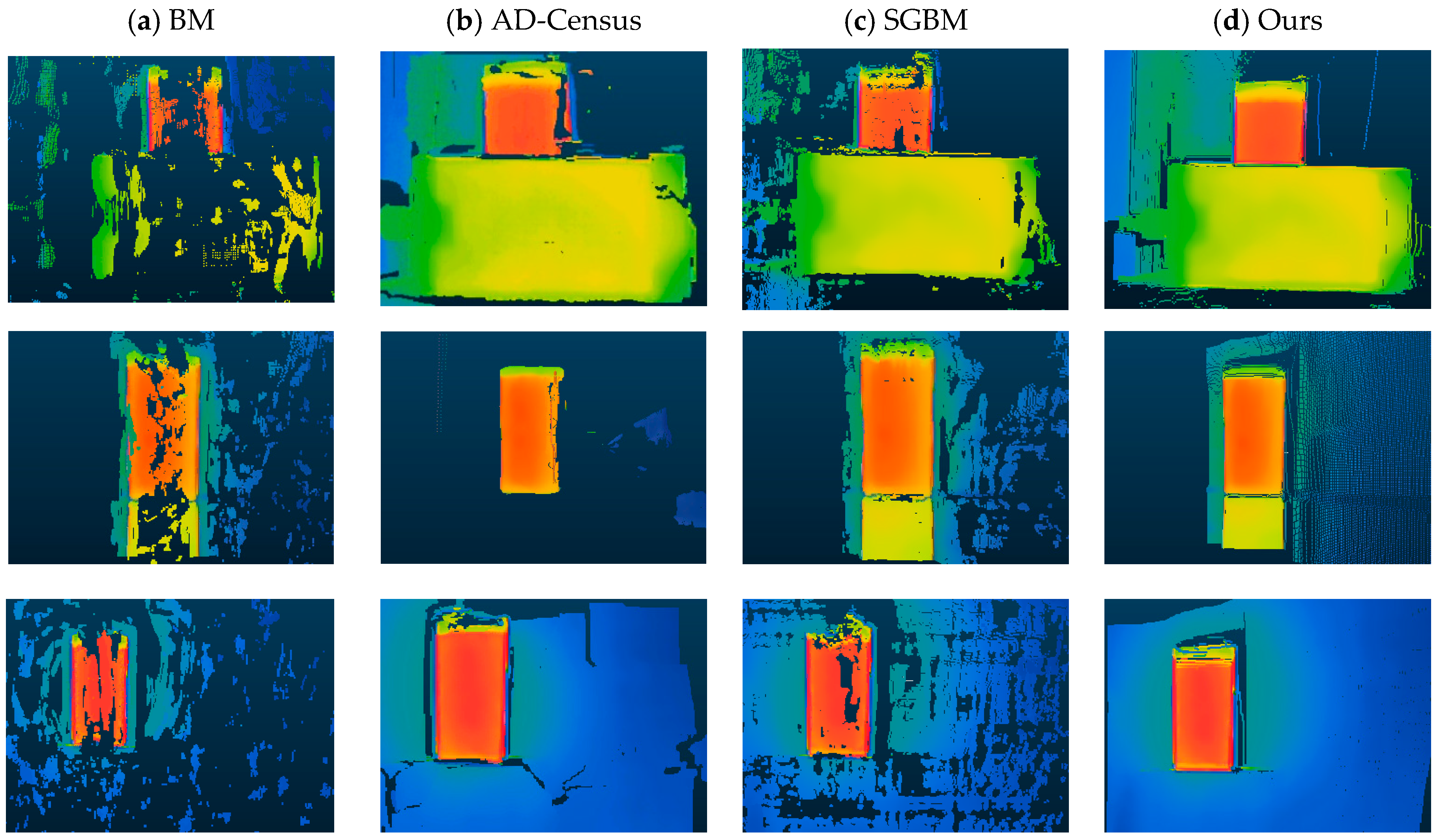
3.3. Stereo Matching Experiment
3.4. Three-Dimensional Reconstruction
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gong, W.; Qin, L.; Ren, G.; Zhou, B. Binocular stereo matching algorithm based on multidimensional feature fusion. Laser Optoelectron. Prog. 2020, 57, 299–306. [Google Scholar]
- Gu, Y.; Lv, J.; Bo, J.; Zhao, B.; Chen, Y.; Tao, J.; Qin, Y.; Wang, W.; Liang, J. Joint Dense 3D Reconstruction Method for Endoscopic Images of Weak Texture Scenes. IEEE Access 2021, 9, 138254–138266. [Google Scholar] [CrossRef]
- Sefercik, U.; Alkan, M.; Jacobsen, K.; Atalay, C.; Buyuksalih, G. Quality analysis of Worldview-4 DSMs generated by least squares matching and semi-global matching. J. Appl. Remote Sens. 2021, 15, 034515. [Google Scholar] [CrossRef]
- Yun, S.; Jung, M.; Kim, J.; Jung, S.; Cho, Y.; Jeon, M.H.; Kim, G.; Kim, A. STheReO: Stereo Thermal Dataset for Research in Odometry and Mapping. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 3857–3864. [Google Scholar]
- Lai, X.; Yang, B.; Ma, B.; Liu, M.; Yin, Z.; Yin, L.; Zheng, W. An Improved Stereo Matching Algorithm Based on Joint Similarity Measure and Adaptive Weights. Appl. Sci. 2023, 13, 514. [Google Scholar] [CrossRef]
- Li, J.; Wang, H.; Zhang, L.; Wang, Z.; Wang, M. The Research of Random Sample Consensus Matching Algorithm in PCA-SIFT Stereo Matching Method. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3338–3341. [Google Scholar]
- Zhang, J.; Zhang, Y.; Wang, C.; Yu, H.; Qin, C. Binocular stereo matching algorithm based on MST cost aggregation. Math. Biosci. Eng. 2021, 18, 3215–3226. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G.R. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Jacob, S.; Menon, V.G.; Joseph, S. Depth Information Enhancement Using Block Matching and Image Pyramiding Stereo Vision Enabled RGB-D Sensor. IEEE Sens. J. 2020, 20, 5406–5414. [Google Scholar] [CrossRef]
- Wei, Y.; Xi, Y. Optimization of 3-D Pose Measurement Method Based on Binocular Vision. IEEE Trans. Instrum. Meas. 2022, 71, 8501312. [Google Scholar] [CrossRef]
- Frommholz, D. Lock-free multithreaded semi-global matching with an arbitrary number of path directions. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2, 143–150. [Google Scholar] [CrossRef]
- Zhu, C.; Chang, Y.-Z. Hierarchical Guided-Image-Filtering for Efficient Stereo Matching. Appl. Sci. 2019, 9, 3122. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, M.; Zhu, Y.; Chen, G.; Xu, Z.; Guo, Y. Improvement of AD-Census Algorithm Based on Stereo Vision. Sensors 2022, 22, 6933. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Wang, J.; Li, Z.; Chen, S.; Wu, F. A Resource-Efficient Pipelined Architecture for Real-Time Semi-Global Stereo Matching. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 660–673. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, X.; Yang, Y. 3D reconstruction based on SGBM semi-global stereo matching algorithm. Laser J. 2021, 42, 139–143. [Google Scholar] [CrossRef]
- Zhao, D.; Chang, Y.; Shan, Y.; Zhang, W. Indoor positioning and reconstruction of the binocular measurement system. Laser J. 2022, 43, 19–23. [Google Scholar] [CrossRef]
- Zhou, L.; Gao, S.; Wang, S.; Zhang, H.; Liu, R.; Liu, J. IPD-Net: Infrared Pedestrian Detection Network via Adaptive Feature Extraction and Coordinate Information Fusion. Sensors 2022, 22, 8966. [Google Scholar] [CrossRef]
- Eltuhamy, R.A.; Rady, M.; Almatrafi, E.; Mahmoud, H.A.; Ibrahim, K.H. Fault Detection and Classification of CIGS Thin-Film PV Modules Using an Adaptive Neuro-Fuzzy Inference Scheme. Sensors 2023, 23, 1280. [Google Scholar] [CrossRef]
- Abreu de Souza, M.; Alka Cordeiro, D.C.; Oliveira, J.d.; Oliveira, M.F.A.d.; Bonafini, B.L. 3D Multi-Modality Medical Imaging: Combining Anatomical and Infrared Thermal Images for 3D Reconstruction. Sensors 2023, 23, 1610. [Google Scholar] [CrossRef]
- Zhu, C.; Chang, Y.-Z. Stereo matching for infrared images using guided filtering weighted by exponential moving average. IET Image Process. 2020, 14, 830–837. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.-M. Non-local means denoising. Image Process. Line 2011, 1, 208–212. [Google Scholar] [CrossRef]
- Sun, S.; Wei, W.; Yuan, X.; Zhou, R. Research on Calibration Methods of Long-Wave Infrared Camera and Visible Camera. J. Sens. 2022, 2022, 8667606. [Google Scholar] [CrossRef]
- Zhong, J.; Li, M.; Liao, X.; Qin, J.; Zhang, H.; Guo, Q. Real-Time Depth Map Estimation from Infrared Stereo Images of RGB-D Cameras. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 2, 107–112. [Google Scholar] [CrossRef]
- Farbman, Z.; Fattal, R.; Lischinski, D.; Szeliski, R. Edge-preserving decompositions for multi-scale tone and detail manipulation. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]
- Setyawan, R.; Sunoko, R.; Choiron, M.; Mudjirahardjo, P. Implementation of Stereo Vision Semi-Global Block Matching Methods for Distance Measurement. Indones. J. Electr. Eng. Comput. Sci. 2018, 12, 585–591. [Google Scholar] [CrossRef]
- Venkatanath, N.; Praneeth, D.; Maruthi Chandrasekhar, B.; Channappayya, S.S.; Medasani, S.S. Blind image quality evaluation using perception based features. In Proceedings of the 2015 Twenty First National Conference on Communications (NCC), Mumbai, India, 27 February–1 March 2015; pp. 1–6. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Name | MSE | PSNR | SSIM | PIQE | Pixel Average | |
|---|---|---|---|---|---|---|
| mean value filter | 129.01 | 27.02 | 0.86 | 91.67 | 106.81 | 0.059 |
| Gaussian filter | 32.8 | 32.97 | 0.95 | 87.69 | 106.88 | 0.012 |
| CLAHE | 208.76 | 24.93 | 0.76 | 57.63 | 112.48 | 0.111 |
| NLM | 11.82 | 37.40 | 0.93 | 83.19 | 106.85 | 0.109 |
| Left Camera | Right Camera | |
|---|---|---|
| Focal Length () | ||
| Principal Point () | ||
| Rotation Matrix | ||
| Translation Vector | ||
| Actual Distance/(mm) | BM/(mm) | AD-Census/(mm) | SGBM/(mm) | Ours/(mm) | |
|---|---|---|---|---|---|
| 1 | 900 | 856.9 | 947.7 | 860.8 | 861.2 |
| 2 | 950 | 915.4 | 972.3 | 971.7 | 954.9 |
| 3 | 1000 | 972.3 | 1042.5 | 976.9 | 986.3 |
| 4 | 1050 | 1025.4 | 1078.5 | 1019.9 | 1033.0 |
| 5 | 1100 | 1123.7 | 1130.5 | 1014.4 | 1086.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, S.; Bai, Z.; Wang, H.; Li, S.; Wen, S. Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared. Sensors 2023, 23, 7372. https://doi.org/10.3390/s23177372
Li H, Wang S, Bai Z, Wang H, Li S, Wen S. Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared. Sensors. 2023; 23(17):7372. https://doi.org/10.3390/s23177372
Chicago/Turabian StyleLi, Huaizhou, Shuaijun Wang, Zhenpeng Bai, Hong Wang, Sen Li, and Shupei Wen. 2023. "Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared" Sensors 23, no. 17: 7372. https://doi.org/10.3390/s23177372
APA StyleLi, H., Wang, S., Bai, Z., Wang, H., Li, S., & Wen, S. (2023). Research on 3D Reconstruction of Binocular Vision Based on Thermal Infrared. Sensors, 23(17), 7372. https://doi.org/10.3390/s23177372