1. Introduction
Tactile sensors have gained immense popularity in robotics and automation systems in applications such as artificial skins, as they provide pressure maps through a force sensor array. However, hysteresis can introduce nonlinearity and measurement errors in tactile sensors and actuator systems, thereby limiting the performance of tactile sensors. To address this challenge, several novel approaches have recently been proposed. One approach focuses on adapting the external loop of the sensor’s control system to compensate for hysteresis [
1]. By estimating the hysteresis error based on the difference between the desired and the measured forces, this modification improves the accuracy and performance of robotic systems by relying on tactile sensors. In the field of piezoelectric actuators, a method for modeling hysteresis patterns using a recurrent neural network (RNN) was introduced [
2]. This network captures the complex nonlinear relationship between the input voltage and output displacement, enabling hysteresis compensation and thus enhancing positioning system accuracy. Furthermore, a generalized Prandtl–Ishlinskii model was employed to compensate for hysteresis in tactile sensors [
3]. By training the model with experimental data, real-time sensor output can be determined, effectively improving force measurement accuracy. Additionally, innovative designs have been developed to minimize hysteresis in tactile sensors, such as a novel soft tactile electronic skin that reduces mechanical and electrical memory effects contributing to hysteresis [
4].
Xiaoliang Chen et al. introduced a novel vibration sensor designed to overcome the limitations of conventional Micro-Electro-Mechanical System (MEMS) vibration sensors [
5]. This sensor utilized a suspended sensing membrane with a channel-crack design, enhancing sensitivity and stability, demonstrating a wide vibration response range from 0.1 to 20,000 Hz and a dynamic range of 0.24–100 m/s
2. The sensor’s flexibility allowed for direct attachment to various surfaces, making it suitable for diverse applications such as energy harvesting and human-machine interaction.
Similarly, a method utilizing a Gaussian process with sensory Markov properties was proposed to counteract hysteresis in tactile sensors [
6]. By incorporating current and past sensory data, the current approach models the hysteresis behavior and estimates the sensor’s output, improving force measurement accuracy in robotic systems. In the field of smart-material systems, an inverse feedforward controller utilizing a Preisach model was introduced to control hysteresis nonlinearities [
7]. This method estimates the hysteresis behavior and generates an inverse feedforward control signal to compensate for the nonlinearities, enhancing the performance and accuracy of smart-material systems. Furthermore, a Generalized Prandtl–Ishlinskii Model (GPIM) inversion technique was proposed to compensate for hysteresis in micropositioning control systems [
8]. By modelling the hysteresis behavior using a GPIM and generating an inverse GPIM-based compensation signal, the accuracy and performance of the micro-positioning control system can be improved. In the field of piezoelectric actuators, a modified Prandtl–Ishlinskii (PI) model was introduced to accurately capture the asymmetric hysteresis behavior [
9]. Several studies have explored hysteresis compensation in soft sensors. For instance, a modified GPIM has been developed for modeling the asymmetric hysteresis nonlinearity of pneumatic artificial muscles (PAMs) [
10]. Inspired by a previous study [
11], the current study aimed to explore a novel and scalable method for fabricating superhydrophobic hierarchical structures for water energy harvesting using Triboelectric Nanogenerators (TENGs). Their work demonstrated significant success in addressing hysteresis nonlinearity in conductive fiber-based tactile sensors through the use of a Backpropagation Neural Network (BPNN) method. This study sought to investigate the potential of applying similar techniques to water energy harvesting in TENGs, contributing to advancements in water energy utilization technologies, building upon previous study findings.
In another study, a novel hysteresis model for piezoelectric actuators was introduced, incorporating memory effects [
12].
Fatima et al. [
13] presented a novel, low-cost pressure sensor matrix aimed at monitoring stroke patients during physiotherapy sessions. The matrix comprises a 4 × 4 flexible pressure sensor array, enabling accurate measurement of patients’ performance and progress in physical exercises. To achieve precise positioning accuracy, an artificial intelligence (AI)-based algorithm was developed and tested, showing superior results, with a mean error of 0.103 cm, compared to conventional mathematical analyses (mean error of 0.704 cm).
The proposed pressure sensor matrix offers several advantageous features, such as cost-effectiveness, ease of fabrication, high sensitivity, robustness, and flexibility, in addition to the use of paper as a structural material, which further enhances these benefits. Despite variations in individual sensor responses, the matrix demonstrates effective recognition of activity and enables assessment of stroke patients’ recovery during exercises.
Several approaches have been employed to mitigate hysteresis in soft sensors, such as recurrent neural networks (RNNs) [
14]. An improved method involving a radial basis function neural network has been proposed for hysteresis modelling and correction in soft sensors [
15]. Additionally, an adaptive approach employing a fuzzy neural network has been applied for hysteresis modelling and compensation in soft sensors [
16]. Furthermore, a hybrid neural network has been developed as an improved method for hysteresis compensation in soft sensors [
17].
In the context of conductive fiber-based tactile sensors, hysteresis nonlinearity can negatively impact precision. To address this issue, the present study introduces a successful BPNN that effectively mitigates hysteresis nonlinearity, thereby enhancing sensor accuracy. However, to gain a better understanding of measurement techniques, exploring alternative methods to tackle hysteresis and drift in tactile sensors is crucial. Capacitive sensing, piezoelectric sensing, optical sensing, resonant sensing, Hall effect sensing, and strain gauge compensation are among the alternatives discussed in this literature review. Each technique offers unique advantages, such as low hysteresis, fast response times, accuracy, and stability. By examining these alternatives, this review aims to provide valuable insights into the diverse approaches in the tactile sensor field. Exploring these alternatives and potential combinations could lead to advancements in achieving even higher accuracy and robustness in tactile sensing applications [
18].
In a dedicated and focused analysis [
19], an in-depth exploration was conducted into the design principles and considerations of silicon piezoresistive pressure sensors. This comprehensive examination underscored the progress made in design methodologies and fabrication processes, while critically evaluating diverse design elements that wield a significant influence over accuracy and overall performance. The study delved into modelling techniques, encompassing analytical formulations and finite element method (FEM) scrutiny, as avenues for estimating pivotal parameters and addressing intricate mechanical, electrical, and thermal facets. Specific design strategies, exemplified by meander-shaped piezoresistors and optimized diaphragm configurations, were discussed in detail in relation to amplifying the sensor’s operational capabilities. The analysis also confronted hurdles associated with temperature sensitivity and doping concentration, thereby offering invaluable insights to developers of pressure sensors and furnishing them with a roadmap for prosperous integration across a spectrum of applications.
Significant progress has been made in compensating and modeling hysteresis in soft sensors based on piezoresistive materials. However, more practical and effective methods are needed to correct hysteresis nonlinearity. To address this issue, a novel approach utilizing a Backpropagation Neural Network (BPNN) is proposed in the current study.
3. Modeling the Hysteresis Nonlinearity in Conductive Fiber-Based Tactile Sensors Using BPNNs
Soft tactile sensors based on piezoresistive materials have drawn significant attention in recent years on account of their wide-ranging applications in robotics, medical devices, consumer electronics, and gaming. However, the accuracy of these sensors is often hindered by hysteresis, a nonlinear phenomenon wherein a sensor’s output is influenced by its current input and previous history. Hysteresis can introduce notable measurement errors and compromise the reliability of the sensor.
Several methods have been proposed to address hysteresis and modify the hysteresis nonlinearity of piezoresistive sensors, including curve-fitting models and neural network approaches [
20,
21,
22,
23]. Though hysteresis approximation using BPNN has already been employed, the novelty of the proposed method lies in its specific application to a conductive fiber-based tactile sensor. Furthermore, BPNN was employed to modify the hysteresis nonlinearity in this particular sensor type, which has not been explored in previous studies within the context of conductive fiber-based tactile sensors.
Notably, the novelty of research is not solely determined by the individual components or techniques utilized. Instead, it often resides in combining or applying these components in a new or unique context. In this instance, although using BPNN for hysteresis approximation is not groundbreaking, its application to conductive fiber-based tactile sensors represents a fresh approach within the specialized domain of tactile sensing.
In addressing the hysteresis phenomenon within our tactile sensor system, the Back Propagation Neural Network (BPNN) was selected as our model of choice. We recognized the existence of alternatives such as Convolutional Neural Networks (CNN), known for their adeptness in handling complex spatial relationships. However, our emphasis on balancing accuracy and simplicity led us to favor the BPNN.
While CNNs are proficient in capturing intricate patterns, their layered architecture and focus on spatial hierarchies can introduce excessive complexity for our specific application. Our goal was to find a solution that effectively mitigates hysteresis while maintaining practicality and deployability.
The BPNN stood out due to its capacity to model nonlinear hysteresis and intricate relationships common in tactile data. Its architecture strikes a balance between accuracy and complexity, avoiding unnecessary intricacies that could hinder interpretability. The model’s stability in handling noisy data aligns with our aim for reliable predictions.
While alternatives are valuable, the BPNN aligns closely with our objective of a pragmatic and precise solution. By utilizing the BPNN to adjust the sensor’s resistance based on polynomial curve approximations, we markedly enhanced the accuracy and consistency of our sensor’s outputs. This decision effectively addressed hysteresis, resulting in an optimally performing tactile sensor system.
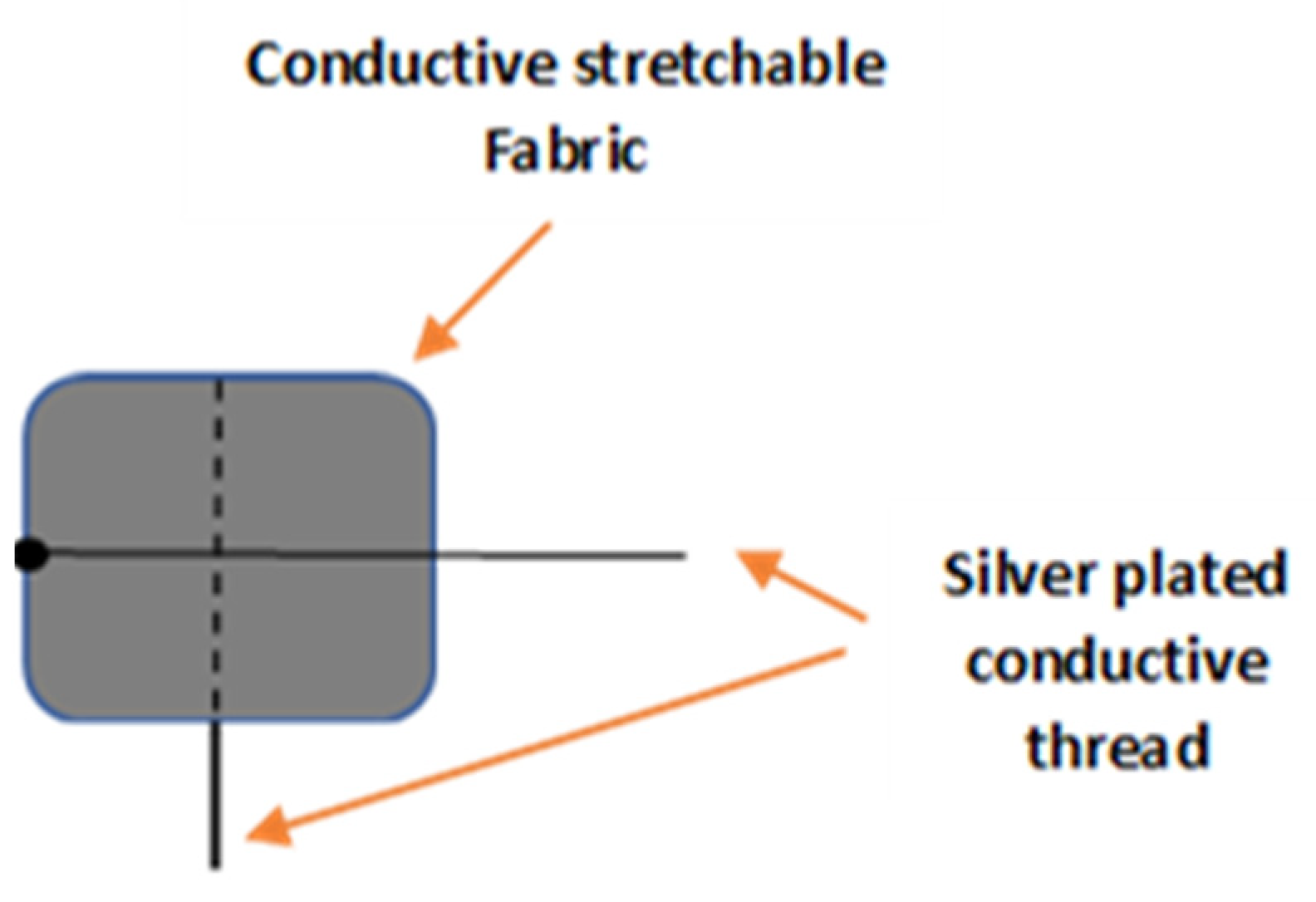
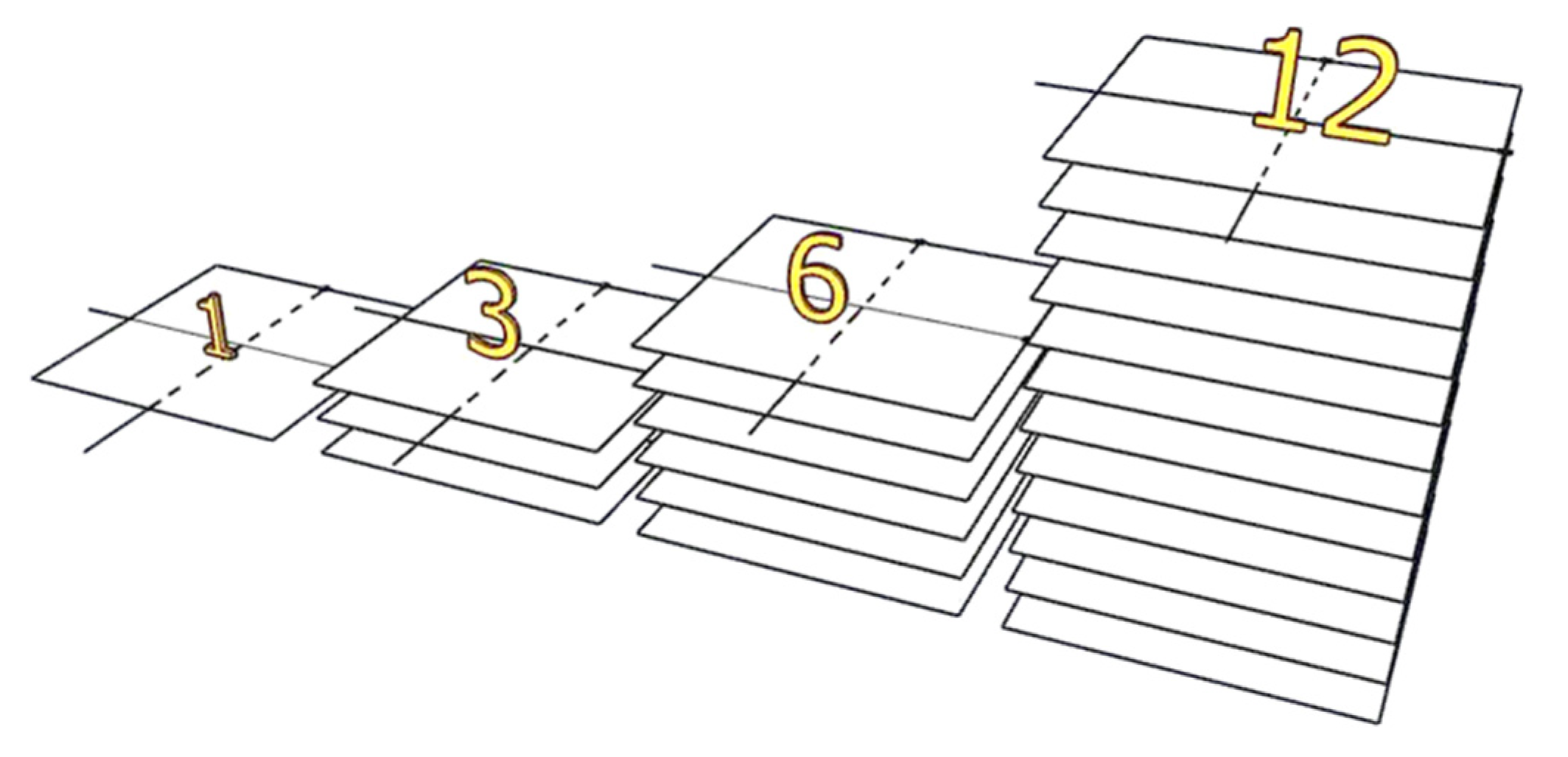
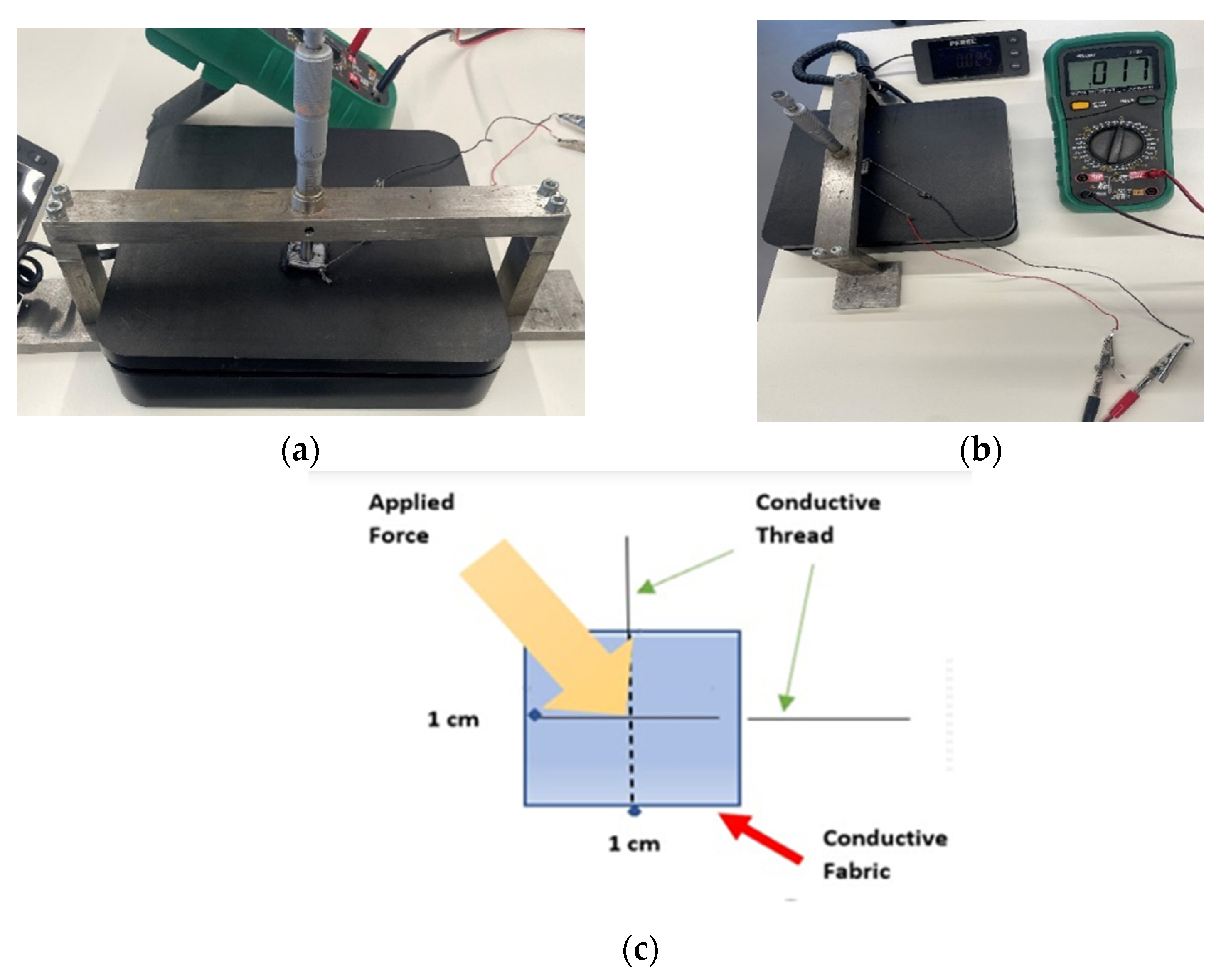
Figure 1 describes the experimental setup used to design four distinct types of sensor units with varying layers, along with the process of collecting output resistances by applying force sequences. These force sequences and the corresponding corrected resistances were employed as inputs to train the BPNN, resulting in favorable convergence and high accuracy. Through validation experiments, a reduction in the maximum error caused by hysteresis was demonstrated in the proposed method, wherein the sensor’s full-scale output was reduced from 24.2% to 13.5%.
Subsequent sections delve into the theoretical background underlying hysteresis modeling, curve-fitting models, and neural networks. Additionally, we elucidate how these methods were integrated into the proposed approach, showcasing a block diagram and a specific algorithm.
3.1. Hysteresis Model Using a Neural Network
The hysteresis model uses a BPNN that inputs the force sequence and results in the corresponding output resistance. The neural network is trained on a set of input–output data pairs, where the input is the force sequence, and the output is the corresponding output resistance of the tactile sensor. During training, the neural network adjusts its weights to minimize the difference between predicted and actual output resistance. Once trained, the neural network can be used to predict the output resistance for any given force sequence [
24,
25,
26].
3.2. Curve-Fitting Model(s)
Curve-fitting models analyze different data points to establish relationships between variables, aiding in predictions and understanding patterns, with effectiveness depending on data quality and proper model selection [
27,
28]. In the current study, a polynomial curve-fitting model was used to correct the hysteresis nonlinearity of the tactile sensor. The polynomial curve-fitting model is given by the following Equation (1):
where
R is the corrected output;
F is the raw input, and
a0,
a1, and
an denote the polynomial coefficients. The coefficients are determined by minimizing the sum of the squared error between the corrected output and the actual output.
3.3. Neural Network
Neural networks (NNs) are computational models that learn complex patterns and relationships from data. With their interconnected layers and mathematical operations, NNs enable accurate predictions and valuable insights in various domains. In the present study, a BPNN was employed to modify the hysteresis nonlinearity of the tactile sensor [
29]. The BPNN algorithm consists of two phases: forward and backward. In the forward phase, the input is propagated through the network to generate the output. In the backward phase, the error between the actual output and the desired output is propagated backwards through the network to adjust the weights of the nodes [
30,
31]. The algorithm can be summarized as shown in Equation (2) below:
Here,
represents the output of node
j in layer
l;
is the weight connecting node I in layer
l −1 to node j in layer
l;
is the output of node I in the previous layer;
is the bias of node
j in layer
l; and
is the activation function.
In the backward phase, the error between the actual output and the desired output is propagated backwards through the network to adjust the weights of the nodes. The error
of each node
j in layer
l measures how much that node contributes to the overall network error. It is defined as the partial derivative of the total error
E for the input
of node
j in layer
l:
The weight updates are then determined based on this network error. The weights are adjusted in a direction that reduces the error by an amount proportional to the error and the previous layer’s output. This is known as the delta rule, which is represented by the following Equation (4):
Here,
is the learning rate, which controls the size of weight updates. The biases are updated similarly:
These weight and bias updates are applied to the network after processing each input to reduce the error gradually over time. By iteratively adjusting the weights and biases, the network can learn the mapping between the input and the desired output.
The algorithm can be summarized as follows:
Initialize the weights and biases of the network randomly;
For each input in the training data:
Perform the forward phase to generate the output of the network;
Calculate the error between the actual output and the desired output;
Perform the backward phase to adjust the weights of the network;
Calculate the error between the actual output and the desired output;
Repeat step 2 for a specified number of epochs or until the network reaches a satisfactory level of performance (see Algorithm 1).
| Algorithm 1: Neural Network Training |
| Require: train_data: Matrix of input training data |
| Require: desired_output: Matrix of corresponding desired output data |
| Require: num_epochs: Number of training epochs |
| Ensure: Trained neural network weights and biases |
| 1: Initialize the network weights and biases randomly |
| 2: for epoch = 1 to num_epochs do |
| 3: for i = 1 to size(training_data,1) do |
| 4: input_data = training_data(i,:) |
| 5: output_data = desired_output(i,:) |
| 6: Perform the forward phase |
| 7: predicted_output = neural_network(input_data) |
| 8: Calculate the error between the predicted output and the desired output |
| 9: loss = loss_function(output_data, predicted_output) |
| 10: Perform the backward phase |
| 11: gradients = backward_phase (loss, neural_network) |
| 12: Update the weights and biases of the network |
| 13: neural_network=update_weights(neural_network, gradients) |
| 14: end for |
| 15: end for |
| 16: return Trained neural network weights and biases |
The selection of BPNN is highly strategic for effectively mitigating hysteresis nonlinearity in conductive fiber-based tactile sensors. This algorithm offers several advantages that align well with the specific challenges posed by hysteresis in this context.
First, BPNN exhibits remarkable generalization capabilities, making it exceptionally suitable for deciphering intricate relationships between input and output variables. Given the intricate and nonlinear nature of hysteresis, BPNN’s ability to capture complex mappings is crucial for achieving accurate corrections.
Moreover, the proposed tactile sensor system demands a modeling approach that strikes an optimal balance between simplicity and efficiency, while still delivering precise predictions. BPNN adeptly fulfils this requirement by offering stability and robustness during the training process. Its resilience in handling noisy or incomplete datasets assures reliable predictions even in real-world scenarios.
Further enhancing its appeal, BPNN boasts high-precision approximation abilities, a critical feature for attaining consistent and accurate tactile measurements. While more intricate neural architectures such as Convolutional Neural Networks (CNNs) or Long Short-Term Memory networks (LSTMs) exist, the inherent complexity of the tactile sensor system makes BPNN an apt and potent choice for tackling nonlinear hysteresis.
While BPNN has found application in diverse domains, its specific adaptation for mitigating hysteresis in conductive fiber-based tactile sensors might remain poorly understood. Therefore, this study significantly contributes to the literature by showcasing the efficacy of BPNN in this specialized domain. The application of BPNN leads to heightened accuracy and reliability in practical implementations, spanning domains such as soft robotics, wearables, and medical devices. This underscores the relevance and value of BPNN as a tailored solution for nonlinear hysteresis within the context of conductive fiber-based tactile sensors.
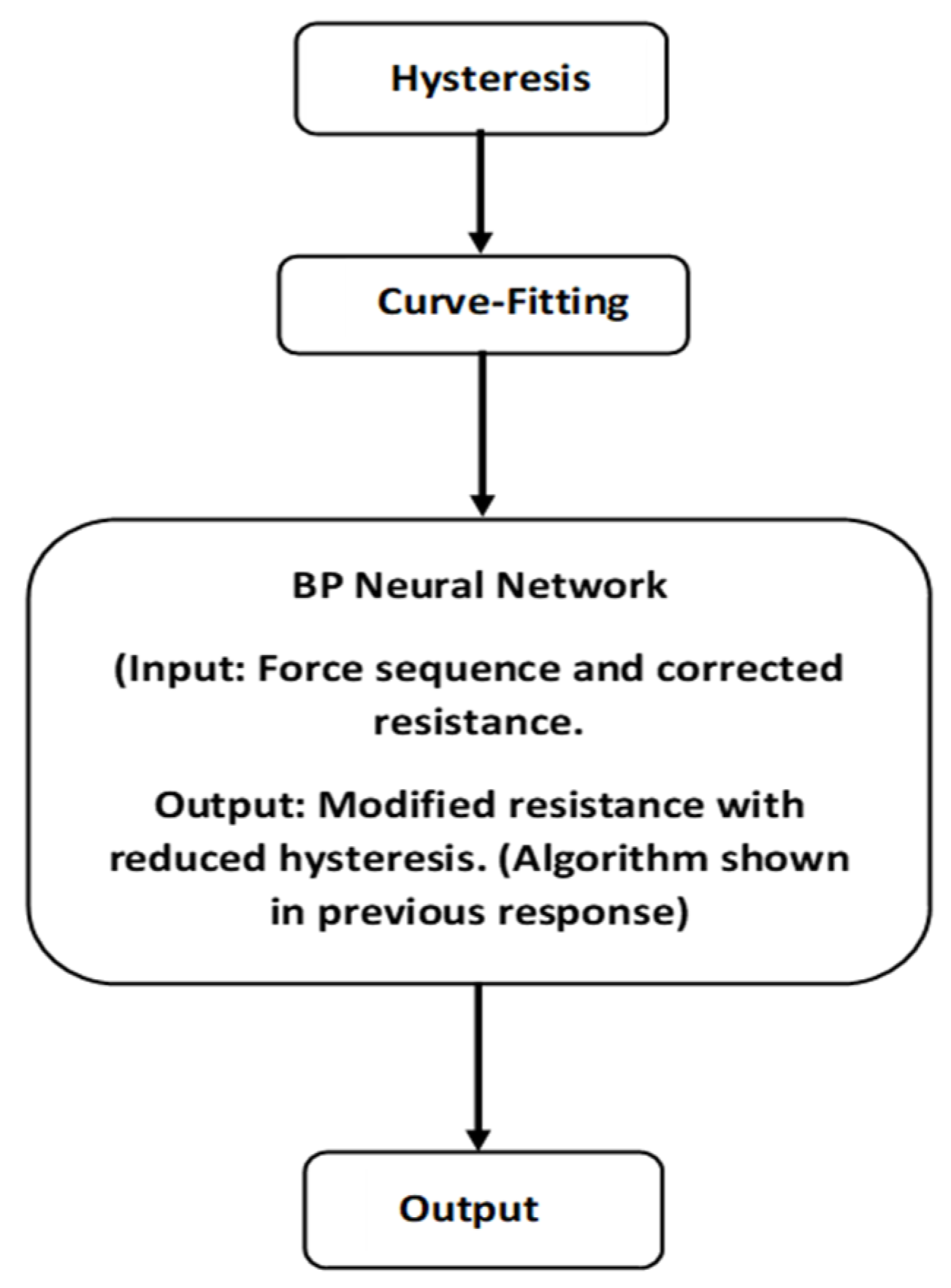
Figure 2 illustrates a generic block diagram showing the integration of the hysteresis model, curve-fitting model, and BPNN):
The integration of the hysteresis model, curve-fitting model, and BPNN provides a comprehensive approach for modeling a system where force is the input and resistance is the output. The hysteresis model captures the non-linear dynamics and the memory effects of the system by the hysteresis model in response to force. The curve-fitting model approximates the mathematical relationship existing between force and resistance. The BPNN learns from the curve-fitting model’s output to improve resistance predictions using backpropagation. This integrated system takes force as input, processes it through the hysteresis model, refines the output with the curve-fitting model, and further enhances it with the BPNN, thereby generating accurate predictions of resistance based on the force applied.
8. Analysis and Discussion
The validation for the tactile sensor was performed by applying force, removing it from the sensors, and measuring the corresponding changes in resistance. The observed resistance changes were then compared to the theoretically expected resistance changes. This validation process specifically focused on evaluating the performance and accuracy of the tactile sensor itself.
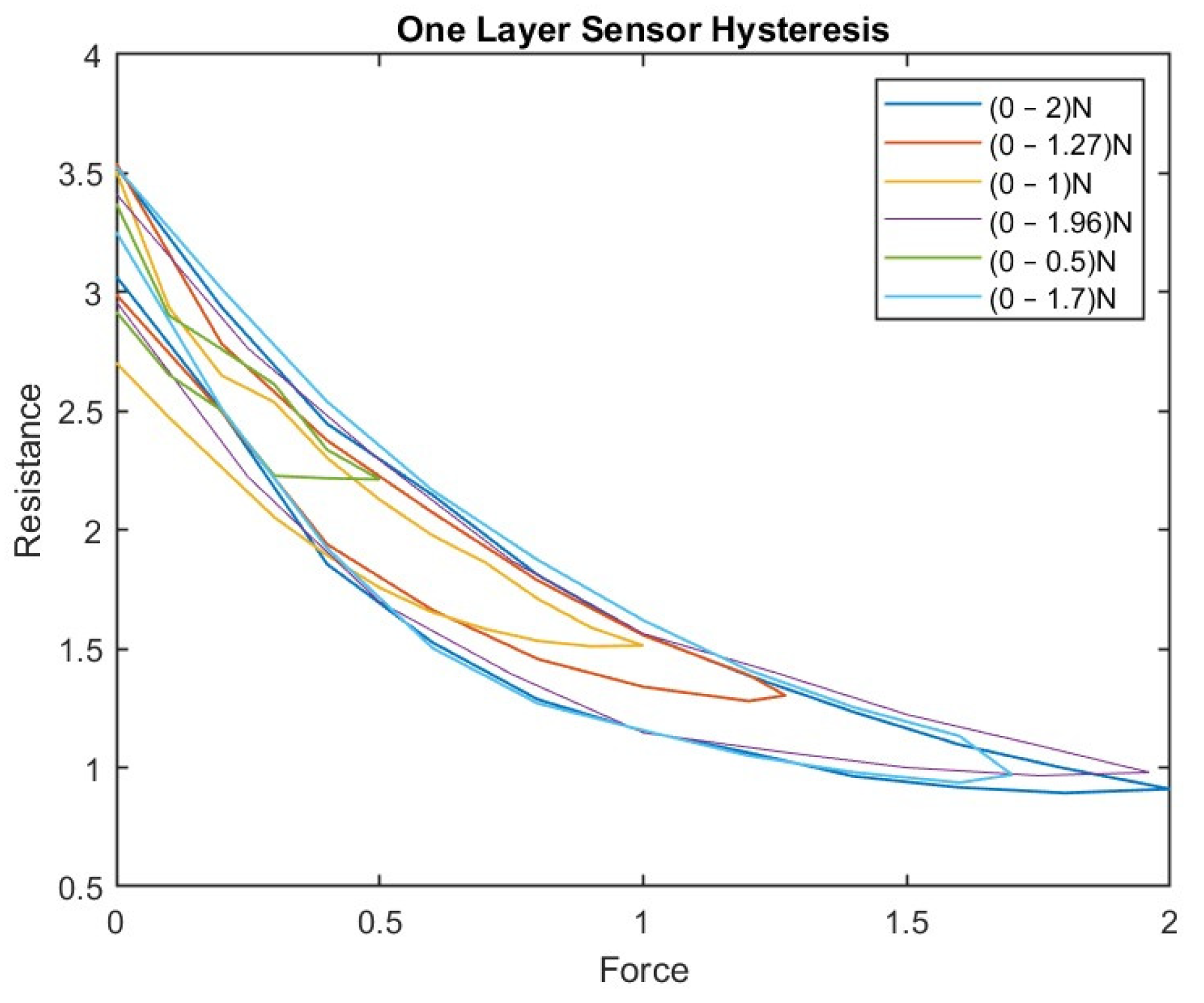
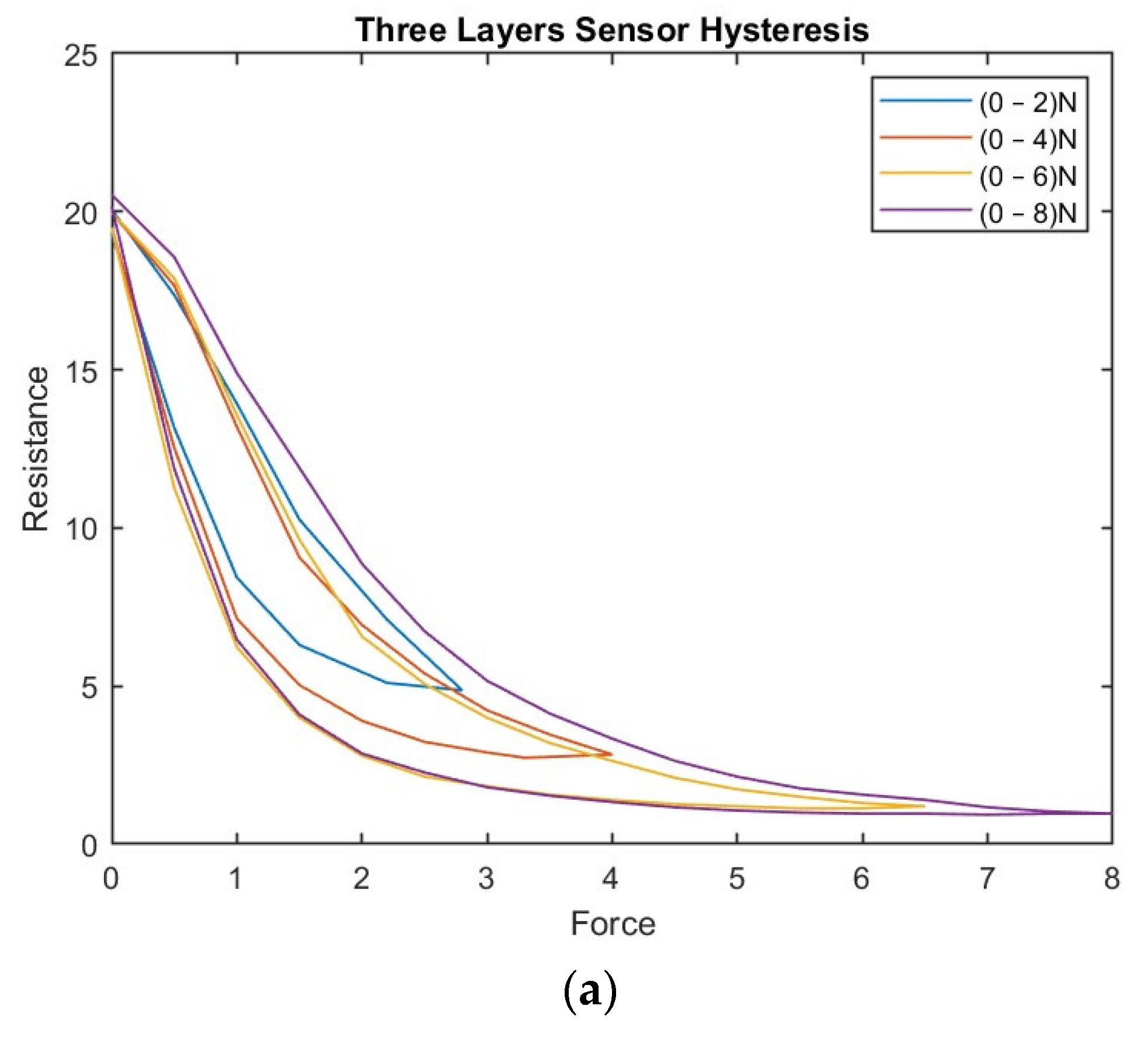
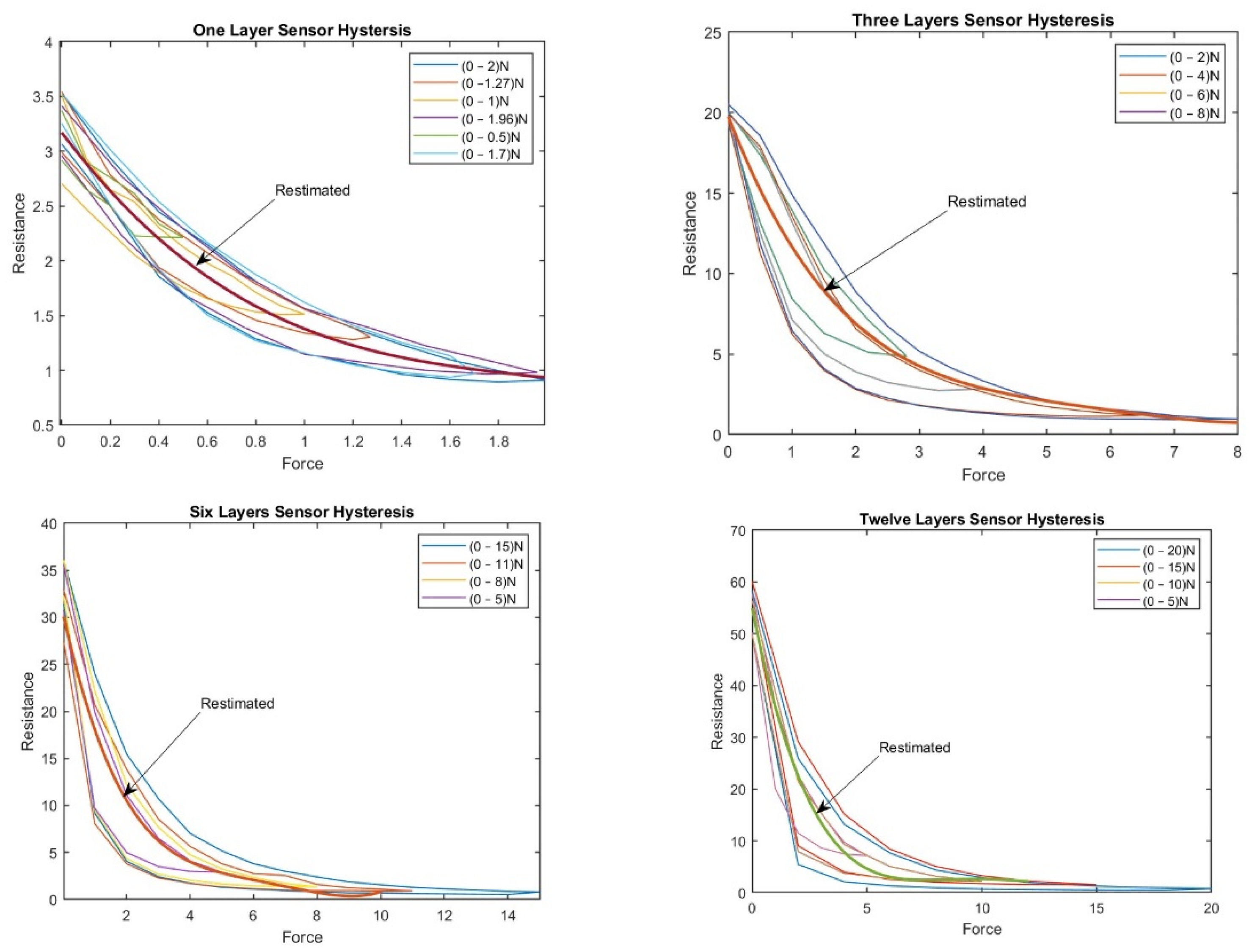
Figure 12 shows the validation of the system by using the same force data set as was used initially to train in the NN model for the one-layer and the other sensors.
As shown in
Figure 12, the tactile sensor has been specifically designed to accurately measure changes in resistance in response to applied or removed force. Through the validation process, the tactile sensor demonstrated its capability to produce reliable and accurate results within the maximum force domain of 2 N for the one-layer sensor.
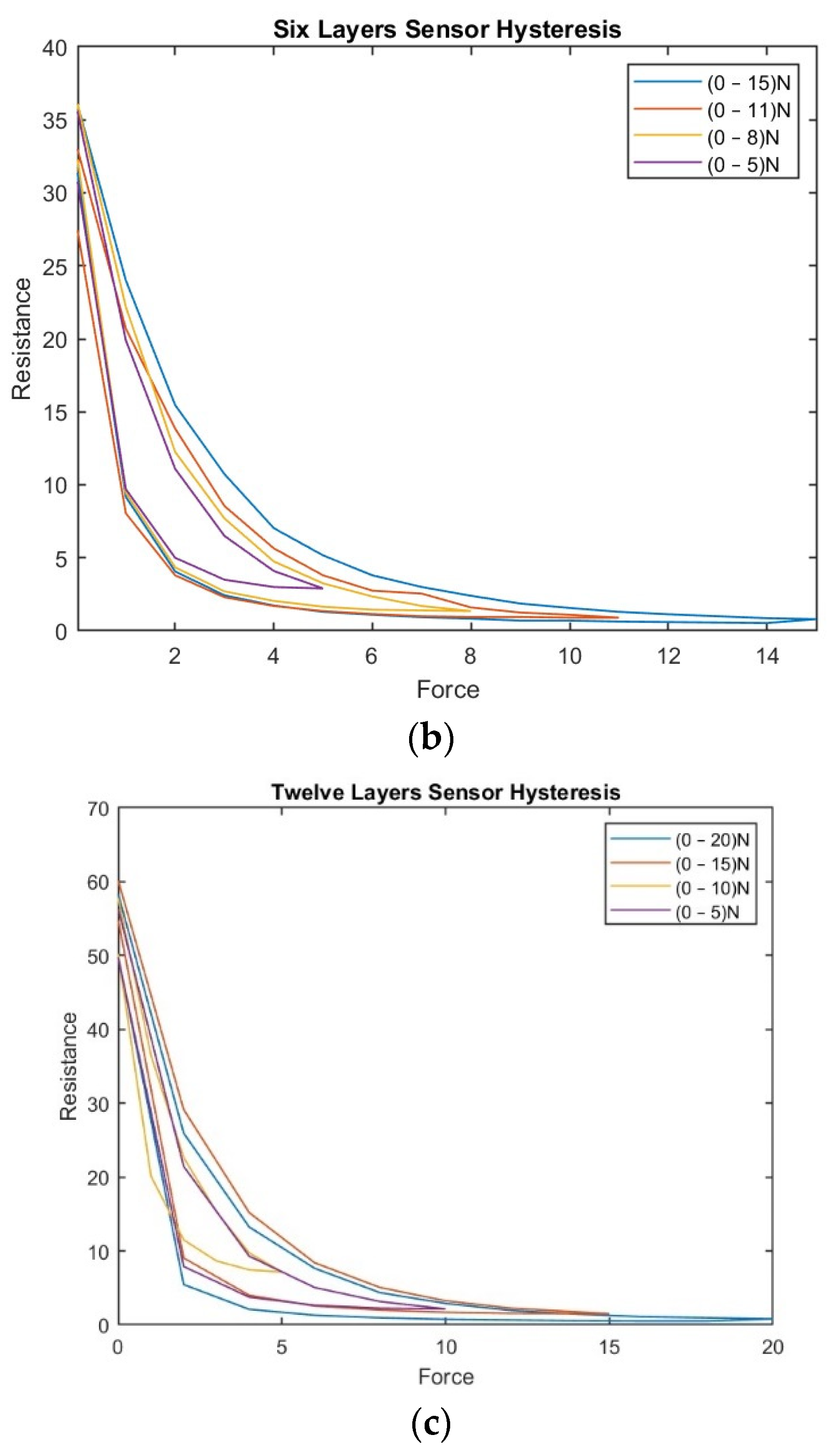
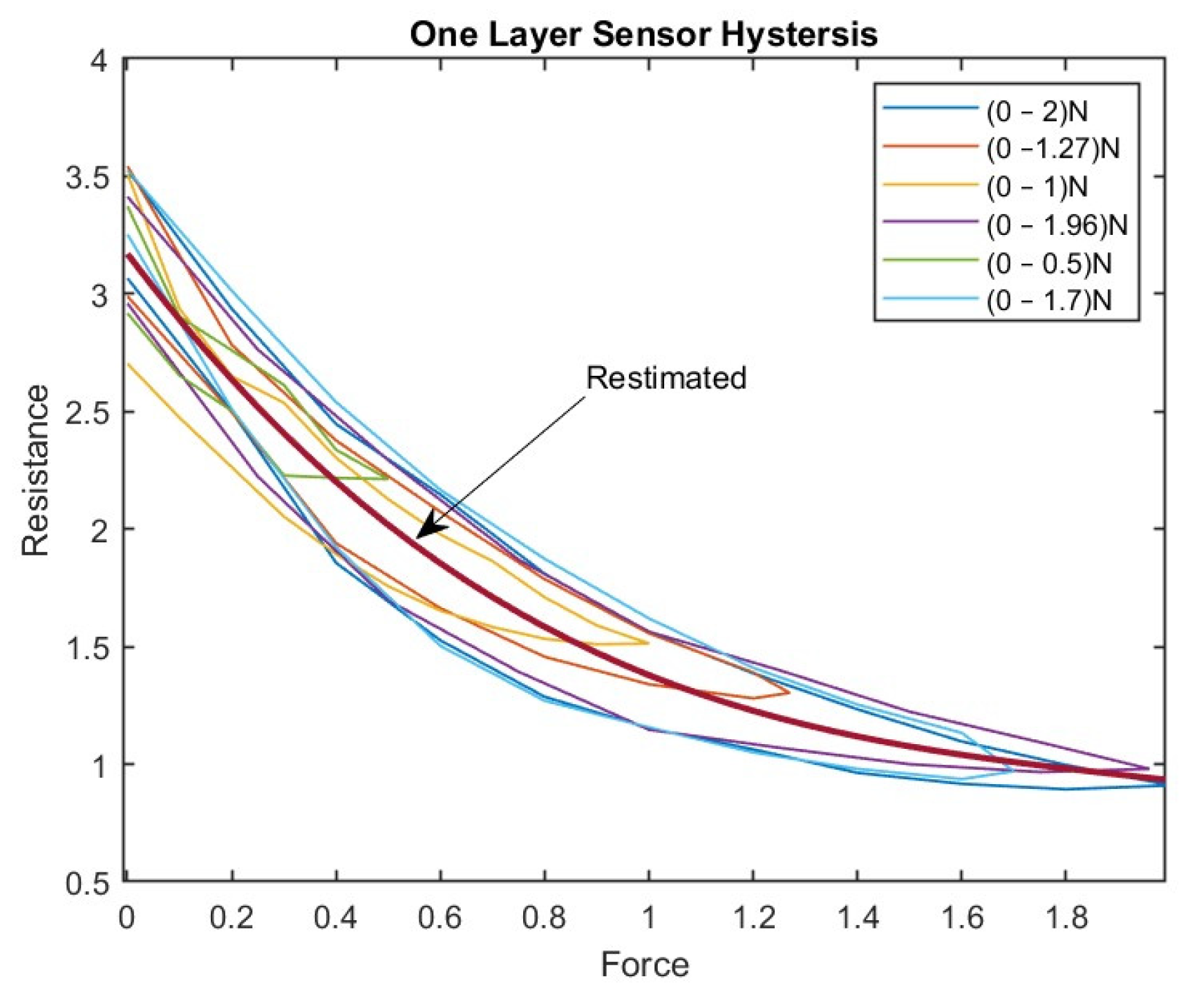
The validation results indicate that the tactile sensor consistently provides measurements that closely align with the actual values of measurements. This alignment signifies that the predicted results generated by the neural network closely match the expected values based on the training data. Notably, the output results of the BPNN, which fall perfectly on the target curve ‘Restimated’ after training, serve as a good indicator of the accuracy and reliability of the tactile sensor.
Furthermore, the use of the same dataset for training and validation purposes facilitates a direct comparison between the predicted and actual results. When the predicted results closely resemble the actual results, the accuracy and reliability of the tactile sensor are confirmed in measuring resistance change.
The above findings show the reliability and accuracy of the tactile sensor in measurements. It consistently provides highly dependable results and demonstrates high alignment between predicted and actual values. Accurate capture of the resistance changes, reliable performance within the specified force range, and close alignment with actual results validate the reliability and accuracy of the tactile sensor in measuring resistance changes.
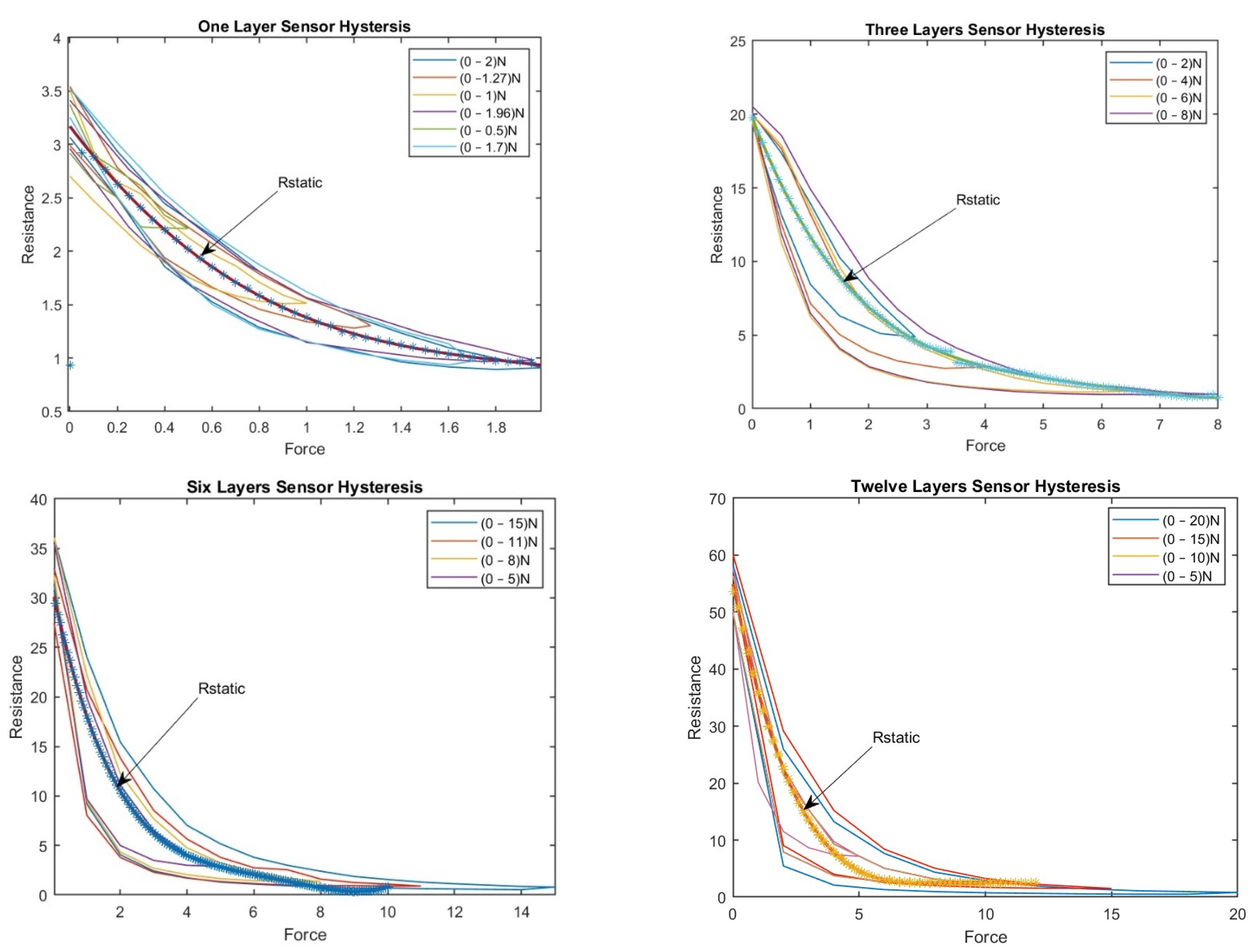
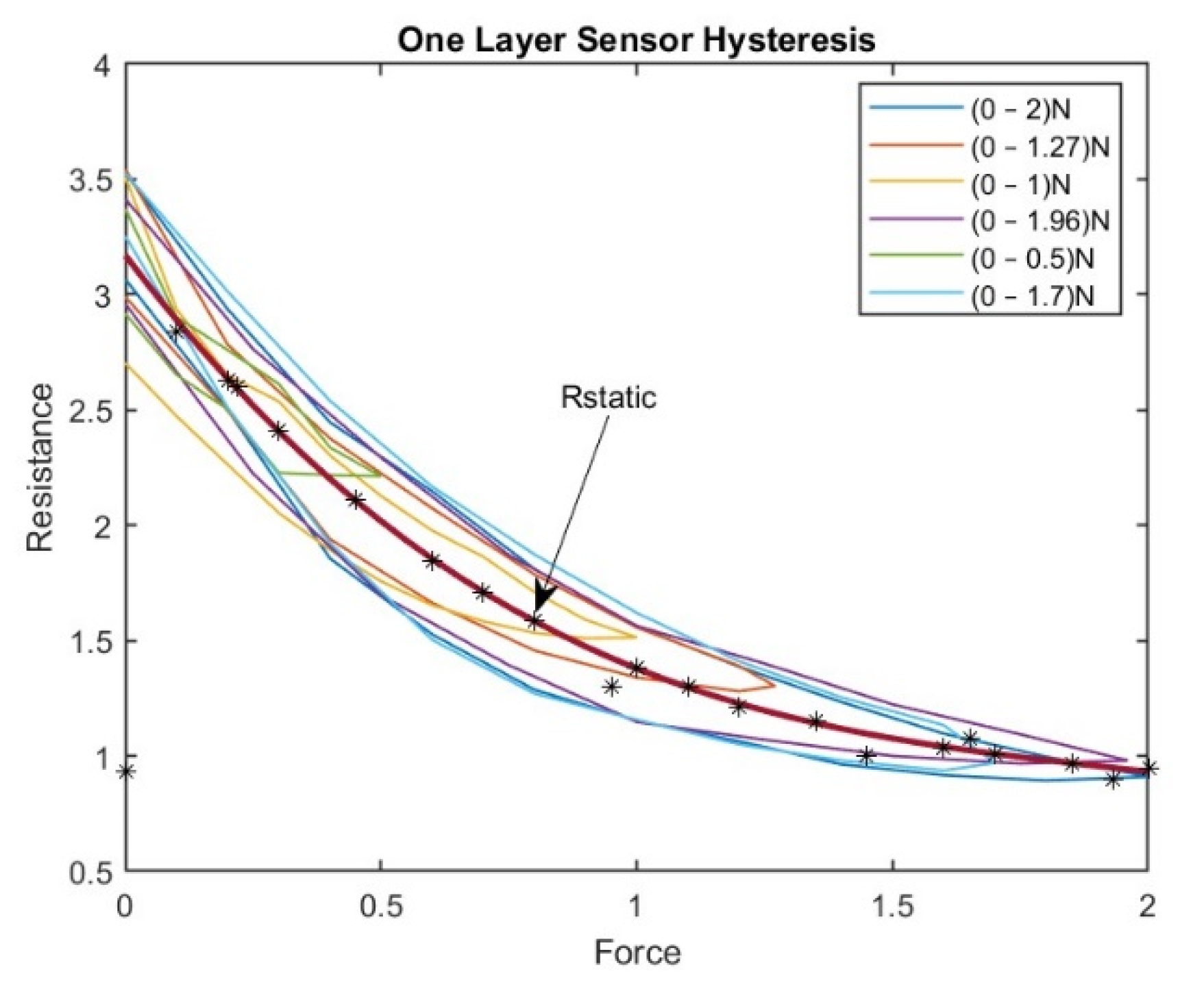
It may be highlighted that using the same data set for training and validation can potentially lead to overfitting, where the model becomes highly specialized to the training data and may struggle to generalize to new data. To address this concern, the model was also validated using new and independent data sets. The tactile sensor was tested with new sets of 25, 30, and 60 random forces, and the resulting output resistance was recorded and compared to the expected values (
Figure 13). This type of testing ensures that the model can accurately predict resistance values even when presented with new and previously unseen data.
Close alignment of the output results of the BPNN with the target curve Restimated after training is a positive indicator of the effectiveness of the training process. This suggests that the neural network has learned the underlying patterns and relationships between force and resistance, resulting in accurate predictions. This alignment between the predicted results and the target curve indicates that the neural network and, subsequently, the tactile sensor perform well in accurately estimating resistance values.
Continuing testing and validation are essential to ensure the ongoing accuracy and reliability of the tactile sensor. This includes testing the tactile sensor under various conditions and using different data sets that were not included in the training process of the BPNN, to ensure its ability to generalize to new situations and data.
In addition to assessing the performance and accuracy of the BPNN, the evaluation of the robustness of the tactile sensor is also important. Robustness refers to the ability of a sensor to consistently maintain its performance and reliability despite uncertainties or variations in the input.
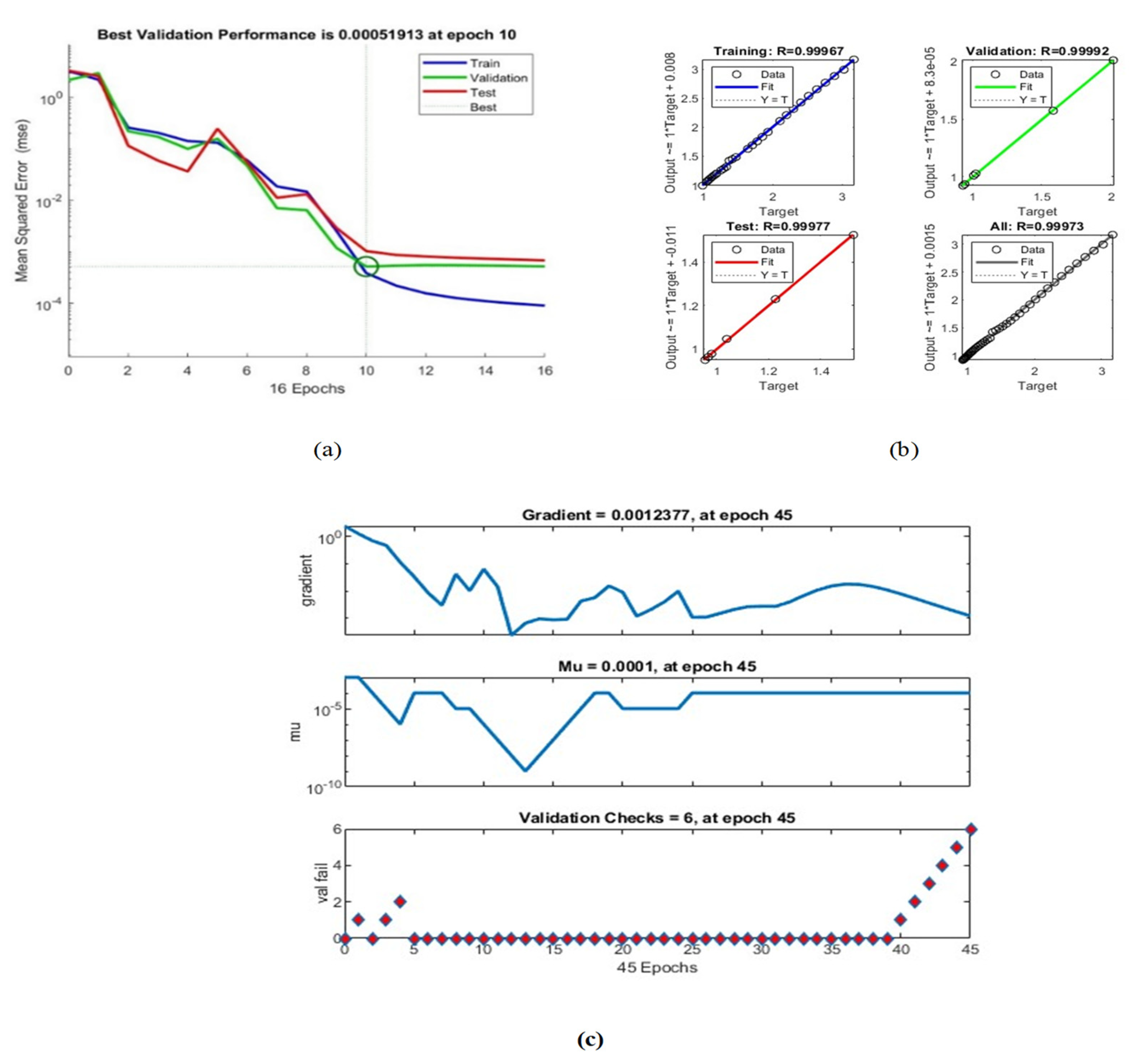
To evaluate the robustness of the tactile sensor, various factors, including the gradient, mu, and validation check values, were considered for neural network training. Analysis revealed that, at epoch 45, the gradient was 0.0012377, mu was 0.0001, and the validation check value was 6. These values provide useful insights into the stability and adaptability of the neural network during the training process.
Furthermore, the validation performance of the BPNN (
Figure 14a) indicates the system’s ability to maintain a low validation error of 0.000051913 at a specific epoch. This suggests that the neural network can consistently provide accurate predictions of the tactile sensor’s resistance despite encountering potential variations in the input force. (See
Table 2).
Data shown in
Figure 14b and the regression values shown in
Table 2 reveal that the proposed system exhibits remarkable robustness. The high R-values across all datasets (training, validation, test, and overall) indicate a strong correlation between the predicted resistance values and the actual values. This consistency in performance demonstrates the system’s ability to handle variations in input effectively.
Moreover, utilizing a new dataset for validation, distinct from the one used for training, provides an additional measure of the system’s robustness. By evaluating the system’s performance on unseen data, the generalizability and ability of the system to handle new scenarios can be evaluated. The close alignment between the predicted and the actual results on the validation dataset suggests that the system maintains its accuracy and reliability when faced with new inputs.
Overall, the system’s robustness is the combination of a low validation error, high correlation coefficients, stability during training, and consistent performance on new datasets. These findings highlight the system’s ability to reliably measure changes in resistance based on the applied force, even in the presence of uncertainties or variations in the input. The system’s robustness enhances its practical utility and strengthens its potential for various applications.
By conducting a comprehensive analysis of the system’s performance, accuracy, and robustness, we gain valuable insights into its behavior and capabilities. These insights can assess the sensor system’s design, optimization, and applicability, thereby contributing to improved reliability and performance of the system in real-world scenarios.
Figure 14 shows the validation performance of the BPNN, with the best validation performance of 0.000051913 at a specific epoch. This indicates that the neural network can accurately predict the sensor’s resistance based on the input force applied.
Figure 14b shows the neural network regression values, with R-values indicating the correlation between the predicted and actual resistance values in training, validation, and test datasets. The R-values in training, validation, and testing are all above 0.9999, indicating a strong correlation between the predicted and actual resistance values. The overall R-value of 0.99973 also indicates a strong correlation between predicted and actual values.
These results suggest that the proposed system performs well and accurately predicts the sensor’s resistance. In the expression 1*Target the “*” is used to perform the matrix multiplication between the scalar value 1 and the matrix Target. This operation will multiply each element of the matrix Target by 1.
Table 3 below displays the results of the BPNN evaluation for sensors with varying numbers of layers. The performance of the BPNN was assessed using the mean squared error (MSE) and correlation coefficient (R) metrics.
The results shown above are based on testing different types of sensors with different numbers of layers. The sensors were evaluated using MSE and R.
Mean squared error is a measure of the difference between the predicted values and the actual values. The lower the MSE, the better the performance of the sensor. A correlation coefficient measures the strength and direction of the relationship between predicted and actual values. The closer the correlation coefficient is to 1, the stronger the relationship between the predicted and actual values.
The results show that the performance of the sensors varies depending on the number of layers. Generally, increasing the number of layers in the sensor improves its performance, as shown by the decreasing values of MSE and increasing R values. However, in some cases, the sensor’s performance decreases as the number of layers increases.
These results provide valuable insights for designing and optimizing sensors for various applications.
Results obtained from testing the BPNN for a tactile sensor with varying layers demonstrate that the proposed method is effective in modifying hysteresis nonlinearity in soft tactile sensors based on piezoresistance materials. The BP algorithm adjusted the neural network weights and brought about good convergence and high accuracy in compensating for the effect of hysteresis. The BPNN presented in this paper exhibits promising potential for enhancing tactile sensors by considering the sensor’s range as a variable. To comprehensively assess its versatility, it is recommended to incorporate additional parameters such as the sensor’s geometry size. This enhancement would broaden its applicability across diverse tactile sensing tasks. While the current findings are substantial, the inclusion of supplementary variables in the future holds the potential for even more notable advancements.
The significance of certain sensor designs and materials that have garnered substantial acceptance within the research community is acknowledged, even though the primary focus in this paper centers on the application of the BPNN approach for sensor analysis. Valuable insights and innovative approaches to sensor technology are offered by these studies, as outlined in the provided papers, which complement and enrich the landscape of our current research.
An inkjet-printed tactile sensor with an impressive combination of wide pressure detection range and high sensitivity was introduced by the work of Lee et al. [
47]. The utilization of inkjet printing technology and the design of a multi-layered architecture showcase how precise fabrication techniques can lead to enhanced tactile sensing capabilities. Similarly, the potential of a structured, flexible, multi-layered, paper-based pressure sensor for applications in human–machine interfacing was highlighted by the research conducted by Sakhuja et al. [
48]. These sensor designs offer a valuable perspective on integrating sensor technology into seamless interactions between humans and machines.
Furthermore, a structural engineering approach to designing flexible capacitive pressure sensors using foil-based materials was presented in the study conducted by Mishra et al. [
49]. This strategy capitalizes on the inherent benefits of flexibility and adaptability in sensor design, while also presenting challenges in maintaining a delicate balance between sensitivity and durability. A novel concept of paper-based capacitive touch pads was introduced in the paper authored by Mazzeo et al. [
50], showcasing an environmentally friendly and cost-effective alternative for interactive interfaces. Although the immense potential for various industries is held by these designs, potential limitations related to the longevity and stability of paper-based materials need to be considered.
Additionally, the prospects of paper-based piezoresistive MEMS sensors were investigated in the research conducted by Liu et al. [
51], aligning with the growing trend of disposable medical devices and wearable electronics. However, this innovative approach, although promising, requires strategies to address challenges associated with maintaining sensor sensitivity and reliability in demanding contexts. Lastly, the impact of diaphragm shape on the performance of foil-based capacitive pressure sensors was delved into by the study carried out by Khan et al. [
52]. Insights into the potential of optimizing sensor designs are offered by this study while emphasizing the necessity of overcoming challenges associated with experimental setups and precise characterizations.
By acknowledging the merit and challenges of these diverse sensor designs and materials, a comprehensive understanding of the field’s current state and its potential directions is gained. As this manuscript advances the field through the application of the BPNN approach for sensor analysis, the value of these studies in further enhancing sensor technology and driving innovation across various industries is recognized.
While this paper primarily focuses on presenting the prototype and experimental outcomes, it is important to highlight the real-world potential of these findings. The experiments conducted encompass foundational motions that serve as the basis for various real-world applications, such as reaching for objects and performing bending motions. These initial tests pave the way for considering more complex scenarios in the future.
This study contributes significantly by proposing a methodology to enhance tactile sensor performance by effectively capturing the nonlinear relationship between force and resistance values. This is achieved through a synergistic combination of polynomial regression and neural network techniques. The resultant models offer enhanced interpretability and ease of understanding, compared to the intricate mathematical models such as Preisach or Prandtl–Ishlinskii, rendering them more suitable for practical implementation across a spectrum of fields including robotics, medical devices, consumer electronics, and gaming. However, the selection of the appropriate modeling technique depends on various factors, such as the specific application, the complexity of the hysteresis behavior, and the availability of data.
The BP neural network presented in this paper exhibits promising potential for enhancing tactile sensors by considering the sensor’s range as a variable. To comprehensively assess its versatility, it is recommended to incorporate additional parameters such as the sensor’s geometry size. This enhancement could broaden its applicability across diverse tactile sensing tasks. While the current findings are substantial, the inclusion of supplementary variables in future research holds the potential for even more notable advancements.
In conclusion, the integration of machine-learning techniques showcased in this study significantly enhances the performance of tactile sensors, marking a substantial advancement in current research and paving the way for promising avenues of exploration within this dynamic field. A comprehensive examination of the advantages and challenges inherent in various sensor approaches discussed across the reviewed papers offers profound insights into their potential trajectories and the obstacles they may face in future applications. The research paper by Lee et al. [
47] underscores the precision achieved through inkjet printing and multilayered architecture, resulting in heightened sensitivity and a wide pressure detection range. However, the intricacies of calibration and the need for sustained durability present formidable challenges that must be overcome to fully harness this potential.
Similarly, the study by Sakhuja et al. [
48] emphasized the benefits of structured design in human-machine interfacing, yet it grapples with the challenge of ensuring long-term reliability and robustness across varying environmental conditions. The work presented by Mishra et al. [
49] explores the flexibility of foil-based materials for adaptable applications, but the ongoing challenge lies in striking the delicate balance between sensitivity and durability, while further refining manufacturing processes.
Likewise, the innovation of capacitive touch pads by Mazzeo et al. [
50] capitalizes on the eco-friendliness and cost-effectiveness of paper, revolutionizing capacitive touch interfaces. However, the potential limitations of paper material longevity and stability necessitate effective mitigation strategies to ensure sustained accuracy over time. The cost-effective and sustainable solutions in paper-based piezoresistive MEMS sensors, as investigated by Liu et al. [
51], align with the trend of disposable medical devices and wearable electronics. Nevertheless, addressing challenges in maintaining sensitivity and reliability in demanding contexts requires innovative approaches.
Lastly, the study conducted by Khan et al. [
52] delved into the prospect of optimized designs through meticulous consideration of diaphragm shapes. Although this avenue holds promise, addressing challenges related to rigorous experimental setups and calibration methodologies is vital to ensure precise characterizations. As a result, the acknowledgment and adept navigation of these multifaceted challenges play a pivotal role in unlocking the full potential of these sensor approaches. Overcoming these obstacles will empower researchers to steer the trajectory of sensor technology, ushering in a new era of innovation, reliability, and versatility that is poised to reshape various industries.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}