
Spectrum-Weighted Fusion Cooperative Detection Algorithm Based on Double Thresholds for Underwater Acoustic Networks

Abstract
1. Introduction
2. Related Work
- (1).
- Multichannel joint spectrum-sensing technologies [23]: In these technologies, the channel is divided into several subchannels for single-threshold energy detection, and the research focus is on optimizing the channel. The spectrum-sensing problem is treated as an optimization problem, where the goal is to maximize the system’s throughput. By exploiting the hidden convexity of the seemingly nonconvex problem, the optimal solution can be obtained. Subsequently, researchers began studying the problem of finding the optimal solution. In [24], the authors emphasized that ordinary mathematical tools can only optimize multiband aggregation throughput under convexity constraints. However, setting interference and utilization bounds limits the range of problems that can be solved using convexity. To address this, a genetic algorithm was proposed as an effective technique for solving nonconvex cooperative multiband sensing problems. In 2008, Xia Qiao-qiao et al. [25] identified some drawbacks of the genetic algorithm, such as a weak local search ability, premature convergence, slow late search, and the need for parameter adjustment. To overcome these limitations, the immune cloning algorithm (ICA) was introduced, which can quickly converge, maintain diversity, and suppress premature convergence. The algorithm considers both global and local search characteristics and relaxes the mathematical form of the objective and constraint functions. It is a simple and easy-to-implement algorithm suitable for solving nonlinear nonconvex complex system optimization problems. However, since most underwater nodes rely on batteries for power, energy savings should be prioritized.
- (2).
- Cooperative detection technologies [26,27,28,29] can be classified into two maincategories: (a) Centralized cooperative detection, where each sensing user reports their detection to a fusion center. The fusion center processes the information based on judgment criteria and distributes the results to each user. This approach allows the fusion center to effectively control the cognitive nodes involved in the collaboration. It also has lower requirements for detection accuracy, energy consumption, and computing power compared with single cognitive nodes. (b) Distributed cooperative detection, where each sensing user exchanges their detection information to determine accessible frequency bands. Multiuser communication traditionally uses eithera code-division multiple-access (CDMA) or time-division multiple-access scheme. The chirp signal resilience to multipaths and the Doppler effect makes it suitable for underwater acoustic communication [30]. The fusion modes for centralized cooperative detection fusion centers are as follows:
- Hard merge: Each sensing user makes a decision based on the information. If a primary user is detected, the decision result is 1; otherwise, the decision result is 0, and the information is sent to the fusion center as 1-bit information [31].
- 1)
- AND criterion: All user decisions indicate the presence of the primary user, and the fusion center determines that the primary user exists.
- 2)
- OR criterion: At least one sensing user believes that the primary user exists, and the fusion center determines that the primary user exists.
- 3)
- K-out-of-N criterion.
- Soft merge: Each sensing user directly sends the detected signal to the fusion center. The fusion center performs fusion processing on the signals that were not processed by the sensing user. However, this approach requires significant expense and may reduce detection performance.
- (3).
- Multithreshold cooperative spectrum sensing involves the use of multiple thresholds and multiple users to enhance detection performance. In practical spectrum-sensing environments, the channel conditions are complex, which can impact detection effectiveness. Additionally, single-user detection can suffer from the hidden terminal problem and receiver interference due to obstacles. By enabling multiple sensing users to detect together and report their findings to a base station or fusion center, the detected information can be fused, and final decisions can be made based on specific decision rules. Multithreshold cooperative spectrum sensing not only improves the overall system detection performance but also reduces the accuracy requirement for single-user detection [36,37].
3. Underwater Acoustic Channel Transmission Model
4. Double-Threshold Cooperative Energy-Detection Model for Underwater Acoustic Communication
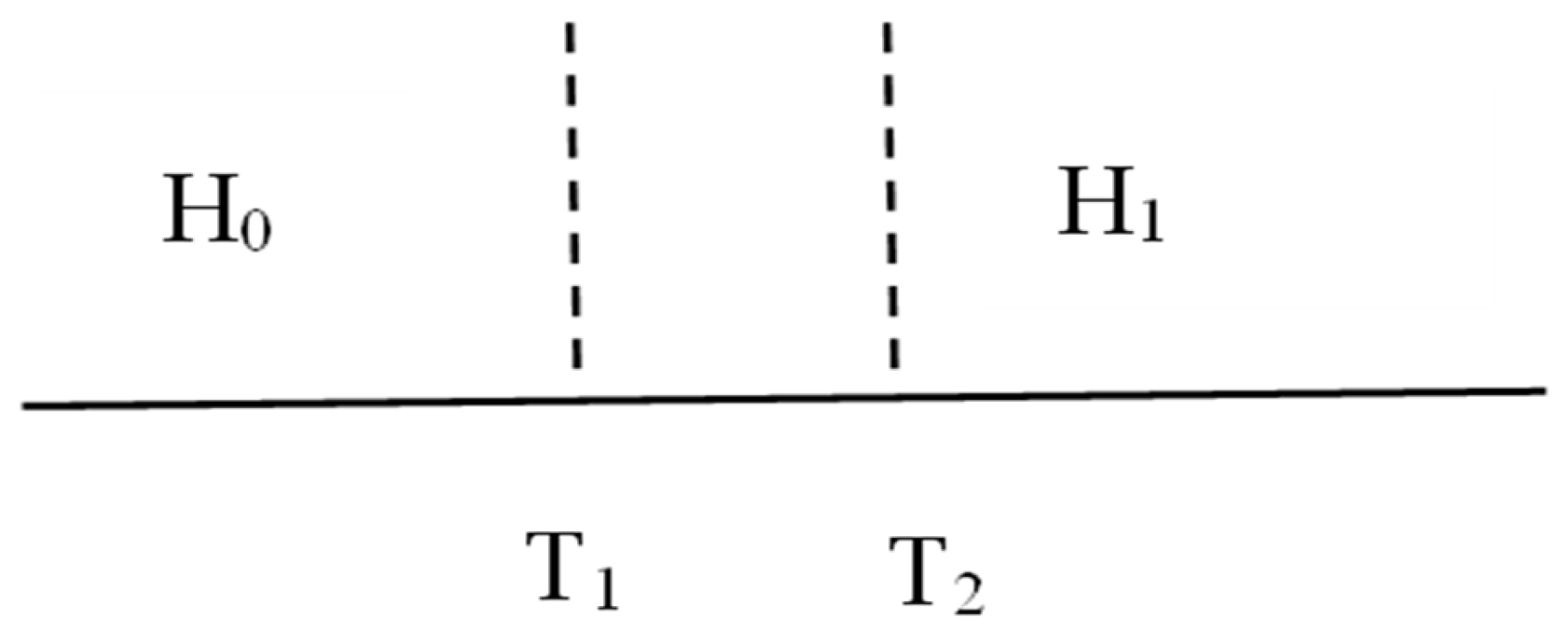
Double-Threshold Energy-Detection Model and Principle
5. Weighted Double-Threshold Cooperative Spectrum–Sensing Algorithm
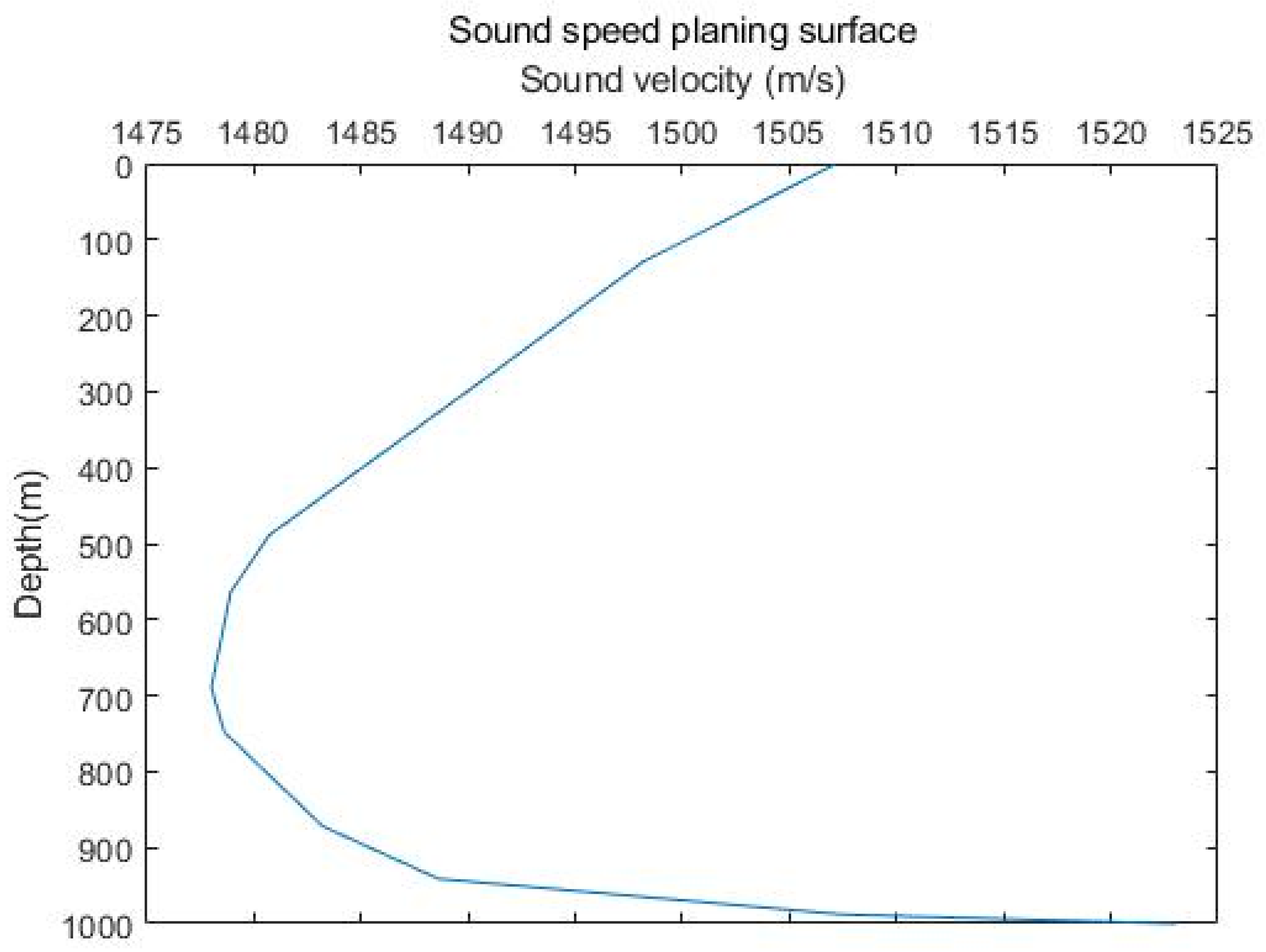
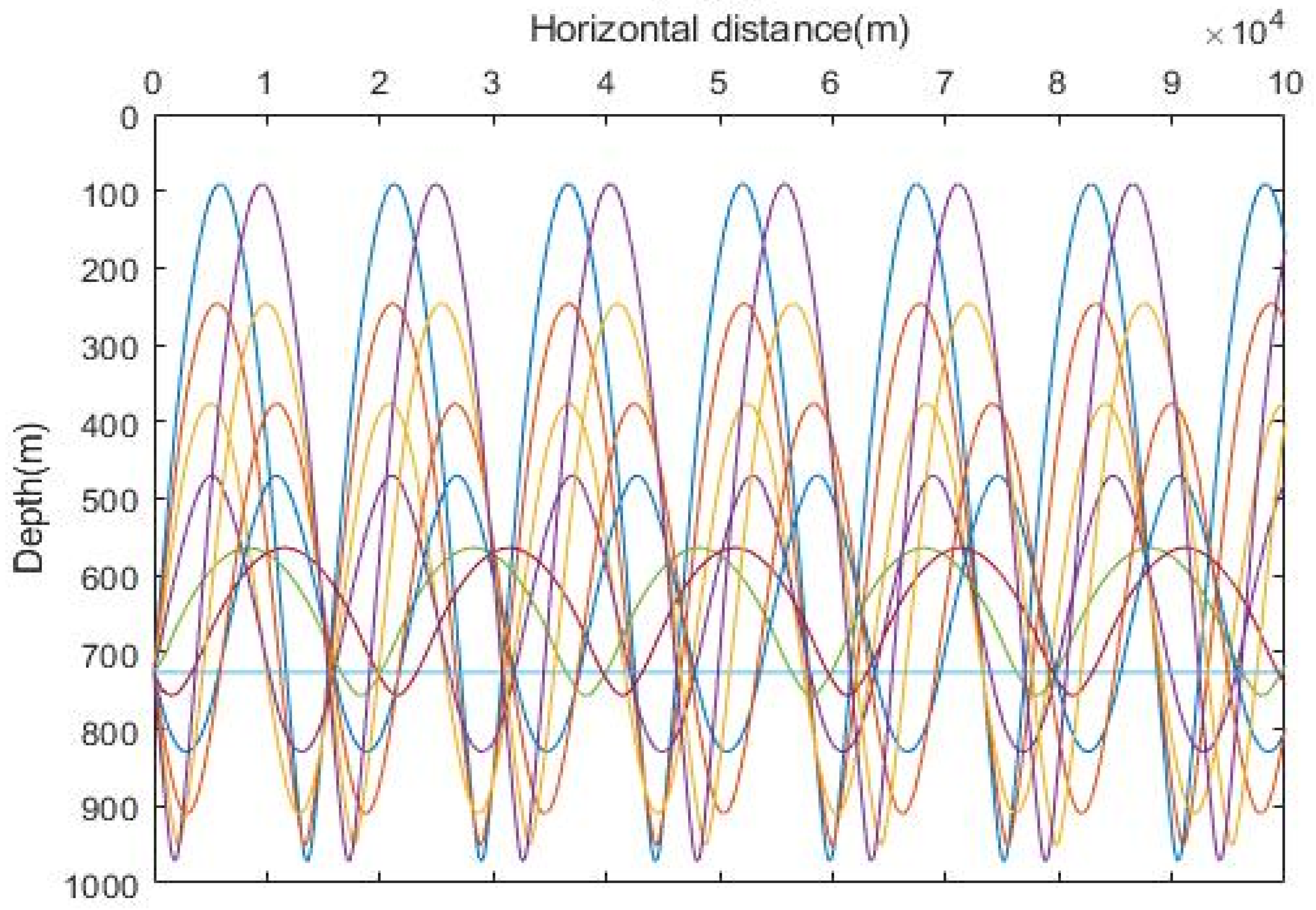
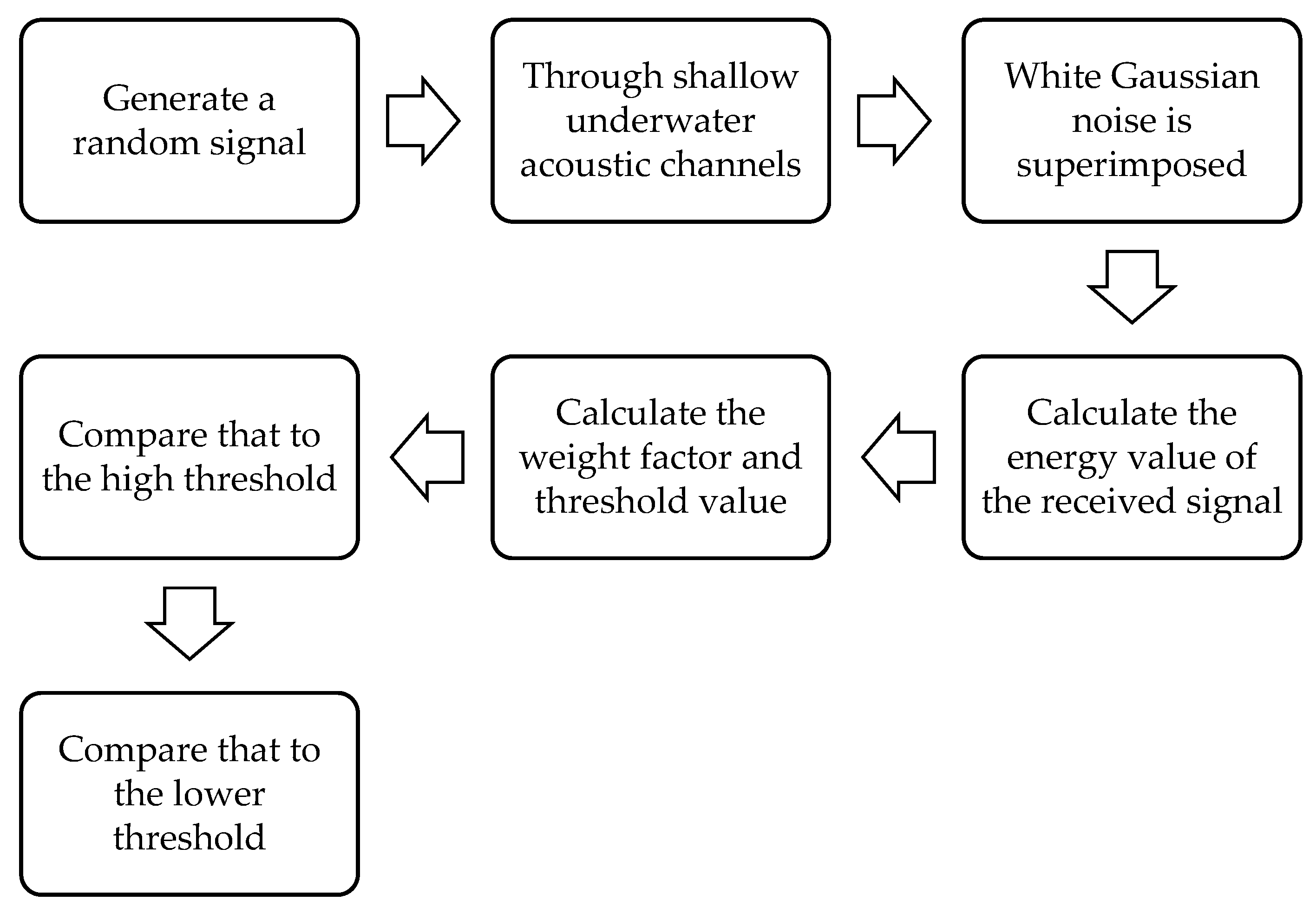
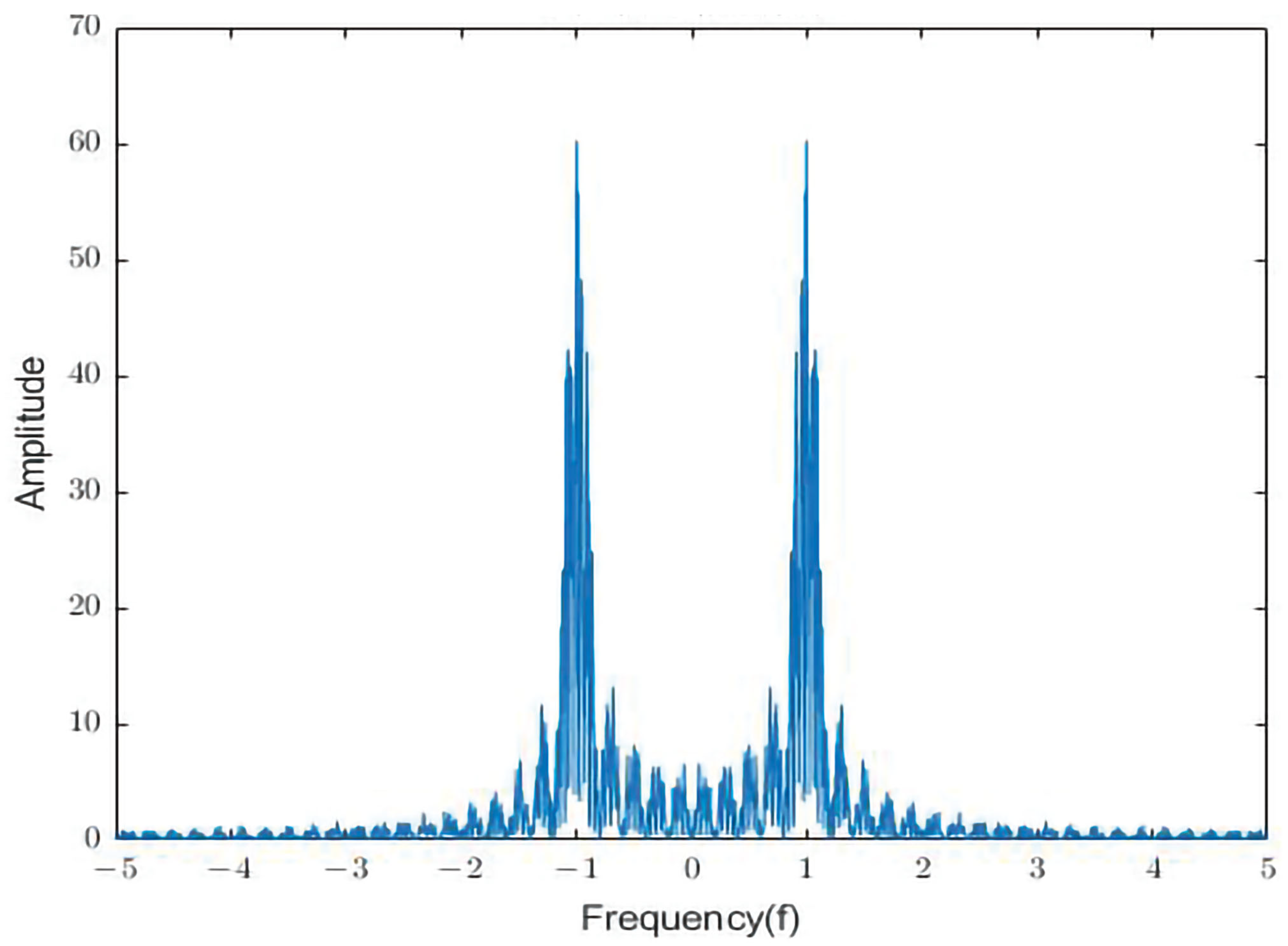
- For the actual sea area, it is assumed that the sound velocity c, the transmitting sound source, the sea depths X1 and X2 of the transmitting/receiving point in the marine environment, and the distance D between the transmitting/receiving points are known. According to ray theory, if there are y intrinsic sound lines, there are y paths to the receiving end. The received signal is obtained by superimposing Gaussian white noise. According to Equation (9), the energy value of the received signal can be calculated.
- According to Equations (14) and (15), the high and low thresholds T1 and T2 can be calculated by the known false alarm probability and the missed detection probability.The weight factor is calculated according to the SNR of each user, and the formula is as follows:where is the weight factor corresponding to the ith cognitive user, and L is the number of cognitive users.The threshold value weighted by the SNR can be expressed by Equations (25) and (26). In an environment with a low SNR, the threshold value will increase, while in an environment with a high SNR, the threshold value will decrease.The calculated energy value of the received signal is compared with the high threshold . If the energy value is higher than the threshold, the signal is judged as the primary user. If the energy value is lower than this threshold, the signal will enter the next cycle, and the energy value will be compared with the lower threshold . If the energy value is lower than this threshold, it will be judged that there is no primary user. If the energy value of the signal is between the thresholds, it will be redetected. If there is no change in the final result, this part of the data will be discarded. The detection probability can be expressed as and :
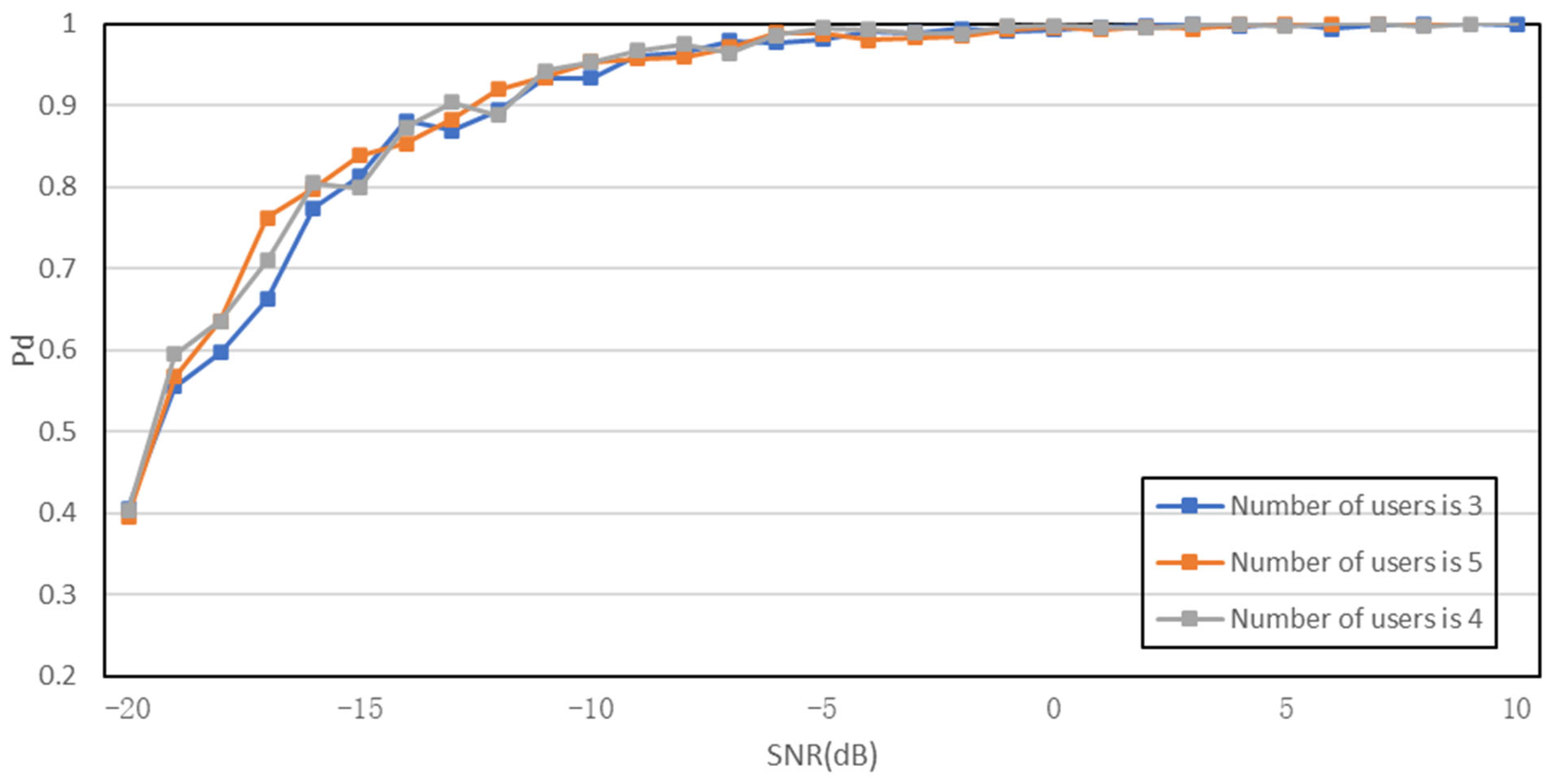
- The fusion center makes a decision according to the detection results of each cognitive user with the OR criterion and adopts the Monte Carlo simulation N_simu = 1000 times.
6. Results and Discussion
- (a)
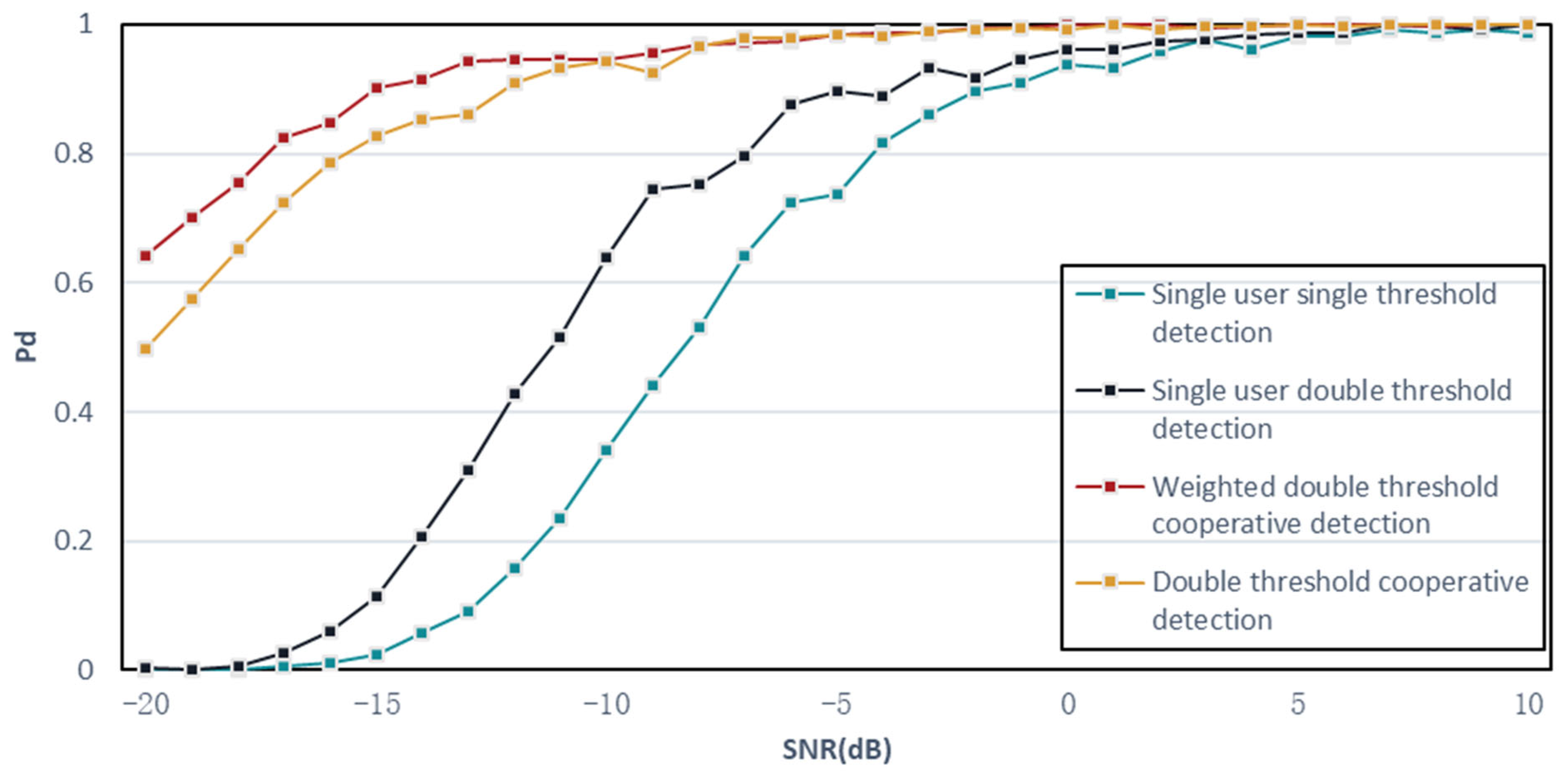
- Single-user single-threshold detection: This represents the traditional energy-detection algorithm.
- (b)
- Single-user double-threshold detection: This algorithm incorporates two threshold values for improved detection performance.
- (c)
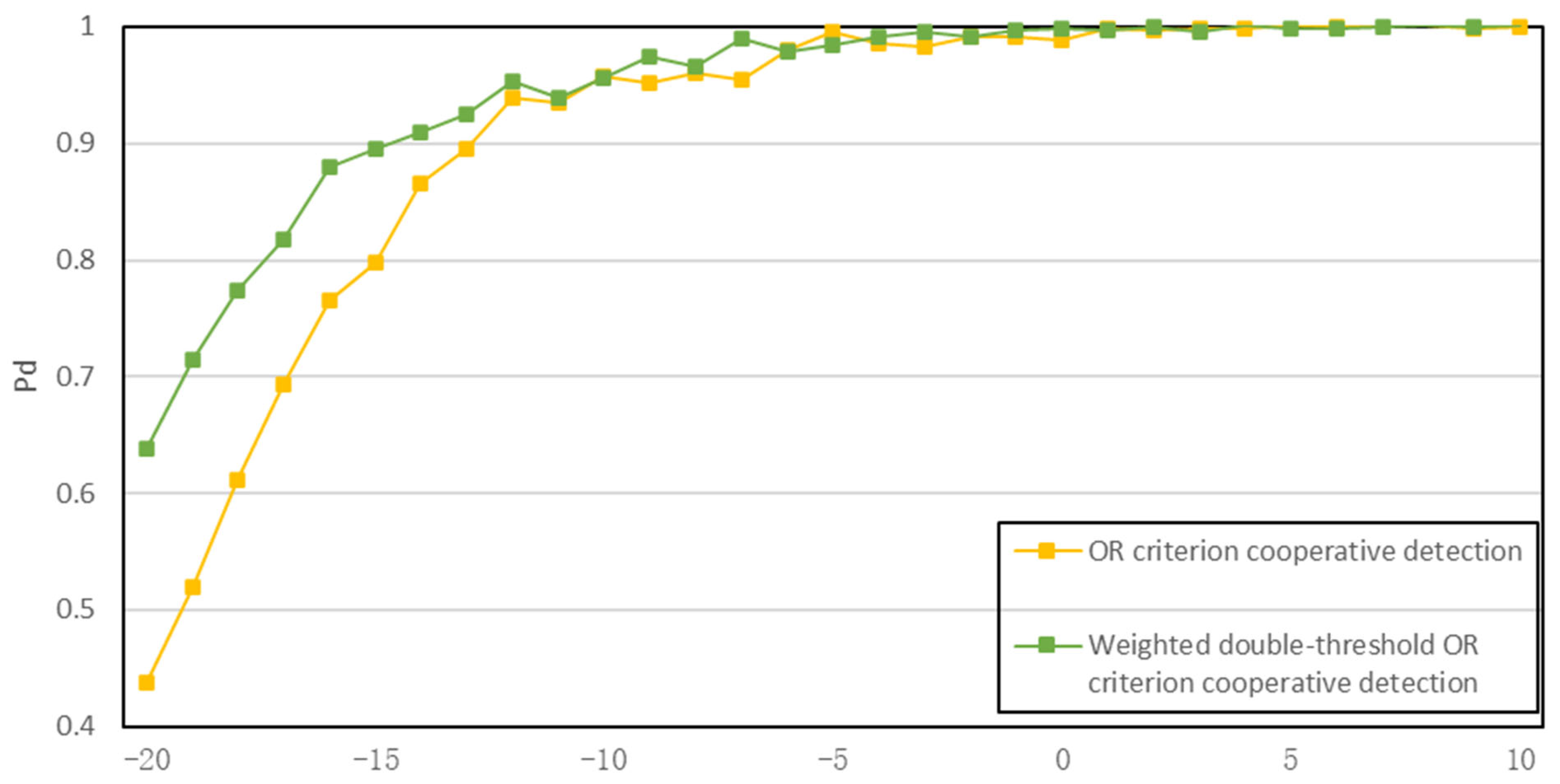
- Double-threshold cooperative detection algorithm: This algorithm utilizes the OR criterion at the fusion center for collaborative detection.
- (d)
- Weighted double-threshold collaborative detection algorithm: This is the algorithm proposed in this paper, which incorporates a weighted factor for dynamic adjustment of the threshold values.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Awan, K.M.; Shah, P.A.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater wireless sensor networks: A review of recent issues and challenges. Wirel. Commun. Mob. Comput. 2019, 2019, 6470359. [Google Scholar] [CrossRef]
- Tang, N.; Zeng, Q.; Luo, D.; Xu, Q.; Hu, H. Research on development and application of underwater acoustic communication system. In Proceedings of the 2nd International Conference on Electronic Engineering and Informatics, Lanzhou, China, 17–19 July 2020; IOP Publishing: Bristol, UK, 2020; Volume 1617, p. 012036. [Google Scholar]
- TPS, B.; Kumar, S. Underwater communications. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; IEEE: New York, NY, USA, 2015; pp. 1–3. [Google Scholar]
- Partan, J.; Kurose, J.; Levine, B.N. A survey of practical issues in underwater networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 23–33. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, Q.; Liu, S.; Muhammad, B.; Wen, M. Symmetric connectivity of underwater acoustic sensor networks based on multi-modal directional transducer. Sensors 2021, 21, 6548. [Google Scholar] [CrossRef]
- He, S.; Wang, N.; Ho, M.; Zhu, J.; Song, G. Design of a new stress wave communication method for underwater communication. IEEE Trans. Ind. Electron. 2020, 68, 7370–7379. [Google Scholar] [CrossRef]
- Gussen, C.M.G.; Diniz, P.S.R.; Campos, M.L.R.; Martins, W.A.; Costa, F.M.; Gois, J.N. A survey of underwater wireless communication technologies. J. Commun. Inf. Syst. 2016, 31, 242–255. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Zuba, M.; Peng, Z.; Cui, J.-H. Challenges and opportunities of underwater cognitive acoustic networks. IEEE Trans. Emerg. Top. Comput. 2014, 2, 198–211. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Haykin, S. Fundamental issues in cognitive radio. In Cognitive Wireless Communication Networks; Springer: Boston, MA, USA, 2007; pp. 1–43. [Google Scholar]
- Claudino, L.; Abrão, T. Spectrum Sensing Methods for Cognitive Radio Networks: A Review. Wirel. Pers. Commun. 2017, 95, 5003–5037. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive dynamic systems. In Cognitive Informatics for Revealing Human Cognition: Knowledge Manipulations in Natural Intelligence; IGI Global: Hershey, PA, USA, 2013; pp. 250–260. [Google Scholar]
- Huang, J.; Wang, H.; He, C.; Zhang, Q.; Jing, L. Underwater acoustic communication and the general performance evaluation criteria. Front. Inf. Technol. Electron. Eng. 2018, 19, 951–971. [Google Scholar] [CrossRef]
- Qarabaqi, P.; Stojanovic, M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater acoustic modems. IEEE Sens. J. 2015, 16, 4063–4071. [Google Scholar] [CrossRef]
- Gan, Z.L.; Li, L. Underwater Acoutic Channel Modeling and Simulation. Ship Electron. Eng. 2016, 36, 96–100. [Google Scholar]
- Sun, B.; Cheng, E.; Ou, X. Research and simulation on shallow water acoustic channels. Wirel. Commun. Technol. 2006, 15, 11–15. [Google Scholar]
- Yonggang, W.; Jiansheng, T.; Yue, P.; Li, H. Underwater communication goes cognitive. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; IEEE: New York, NY, USA, 2008; pp. 1–4. [Google Scholar]
- Digham, F.F.; Alouini, M.S.; Simon, M.K. On the energy detection of unknown signals over fading channels. In Proceedings of the IEEE International Conference on Communications, 2003. ICC’03, Anchorage, AK, USA, 11–15 May 2003; IEEE: New York, NY, USA, 2003; Volume 5, pp. 3575–3579. [Google Scholar]
- Rugini, L.; Banelli, P.; Leus, G. Small sample size performance of the energy detector. IEEE Commun. Lett. 2013, 17, 1814–1817. [Google Scholar] [CrossRef]
- Chin, W.L. On the noise uncertainty for the energy detection of OFDM signals. IEEE Trans. Veh. Technol. 2019, 68, 7593–7602. [Google Scholar] [CrossRef]
- Yang, L. The Research of Spectrum Detection in Cognitive Underwater Acoustic Communication. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2015. [Google Scholar]
- Wang, M.; Yang, L. Particle Swarm Optimization Algorithm Based Multiband Joint Spectrum Detection Method for Cognitive Underwater Acoustic Communication. Sci. Technol. Eng. 2015, 15, 262–266. [Google Scholar]
- Sanna, M.; Murroni, M. Optimization of non-convex multiband cooperative sensing with genetic algorithms. IEEE J. Sel. Top. Signal Process. 2010, 5, 87–96. [Google Scholar] [CrossRef]
- Xia, Q.Q.; Tian, M.; Wang, D.W.; Chen, X. Immune Clone Algorithm Based Multiband Joint Detection Method for Cognitive Radio. J. Electron. Inf. 2014, 36, 55–60. [Google Scholar]
- Letaief, K.B.; Zhang, W. Cooperative spectrum sensing. In Cognitive Wireless Communication Networks; Springer: Boston, MA, USA, 2007; pp. 115–138. [Google Scholar]
- Zhang, W.; Mallik, R.K.; Letaief, K.B. Cooperative spectrum sensing optimization in cognitive radio networks. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; IEEE: New York, NY, USA, 2008; pp. 3411–3415. [Google Scholar]
- Assra, A.; Yang, J.; Champagne, B. An EM approach for cooperative spectrum sensing in multiantenna CR networks. IEEE Trans. Veh. Technol. 2015, 65, 1229–1243. [Google Scholar] [CrossRef]
- Arshad, K.; Moessner, K. Collaborative spectrum sensing for cognitive radio. In Proceedings of the 2009 IEEE International Conference on Communications Workshops, Dresden, Germany, 14–18 June 2009; IEEE: New York, NY, USA, 2009; pp. 1–5. [Google Scholar]
- Zuberi, H.H.; Liu, S.; Sohail, M.Z.; Pan, C. Multi-user underwater acoustic communication using binary phase-coded hyperbolic frequency-modulated signals. IET Commun. 2022, 16, 1415–1427. [Google Scholar] [CrossRef]
- Peh, E.; Liang, Y.C. Optimization for cooperative sensing in cognitive radio networks. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; IEEE: New York, NY, USA, 2007; pp. 27–32. [Google Scholar]
- Sun, C.H.; Zhang, W.; Ben, K. Cluster-based cooperative spectrum sensing in cognitive radio systems. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24 June 2007; pp. 2511–2515. [Google Scholar]
- Xia, W.F.; Wang, S.; Liu, W. Cluster-based energy efficient cooperative spectrum sensing in cognitive radios. In Proceedings of the 2009 5th International Conference on Wireless Communications Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4. [Google Scholar]
- Zhu, J.; Zheng, B.; Zou, Y. Cooperative spectrum sensing in multiuser cognitive radio networks with best relay selection. Acta Electonica Sin. 2010, 38, 92. [Google Scholar]
- Zhao, T.; Zhao, Y. A New Cooperative Detection Technique with Malicious User Suppression. In Proceedings of the 2009 IEEE International Conference on Communications, Dresden, Germany, 14–18 June 2009; pp. 1–5. [Google Scholar]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation issues in spectrum sensing for cognitive radios. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; IEEE: New York, NY, USA, 2004; Volume 1, pp. 772–776. [Google Scholar]
- Ghasemi, A.; Sousa, E.S. Collaborative spectrum sensing for opportunistic access in fading environments. First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, 2005. DySPAN 2005, Baltimore, MD, USA, 8–11 November 2005; IEEE: New York, NY, USA, 2005; pp. 131–136. [Google Scholar]
- Zou, L.; Chen, J.J. Performance Analysis of Double-Threshold Cooperation Energy Detection. J. Yancheng Inst. Technol. (Nat. Sci. Ed.) 2014, 27, 5–8. [Google Scholar]
- Sun, C.; Zhang, W.; Letaief, K.B. Cooperative spectrum sensing for cognitive radios under bandwidth constraints. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; IEEE: New York, NY, USA, 2007; pp. 1–5. [Google Scholar]
- Jiang, X.; Wong, K.K.; Zhang, Y.; Edwards, D. On hybrid overlay–underlay dynamic spectrum access: Double-threshold energy detection and Markov model. IEEE Trans. Veh. Technol. 2013, 62, 4078–4083. [Google Scholar] [CrossRef]
- Pan, J.G.; Zhai, X.P. Spectrum Sensing in Cognitive Radio Based on Energy Detection. J. Shanghai Univ. 2009, 15, 202–209. [Google Scholar]
- Hu, Y. Research on Spectrum Sensing Technology in Cognitive Underwater Communication. Master’s Thesis, South China University of Technology, Guangzhou, China, 2012. [Google Scholar]
- Vien, Q.T.; Nguyen, H.X.; Trestian, R.; Shah, P.; Gemikonakli, O. A hybrid double-threshold based cooperative spectrum sensing over fading channels. IEEE Trans. Wirel. Commun. 2015, 15, 1821–1834. [Google Scholar] [CrossRef]
- Zhu, C.P. Basic Principles and Applications of Hydroacoustic Communication; Electronic Technology Press: Croydon, UK, 2009; p. 327. [Google Scholar]
- Tyurin, A.M.; Stashkevich, A.P.; Taranov, E.S. Principles of Hydroacoustice; Wright Patterson Air Force Base, Foreign Technology Division, Translation Division: Dayton, OH, USA, 1971. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
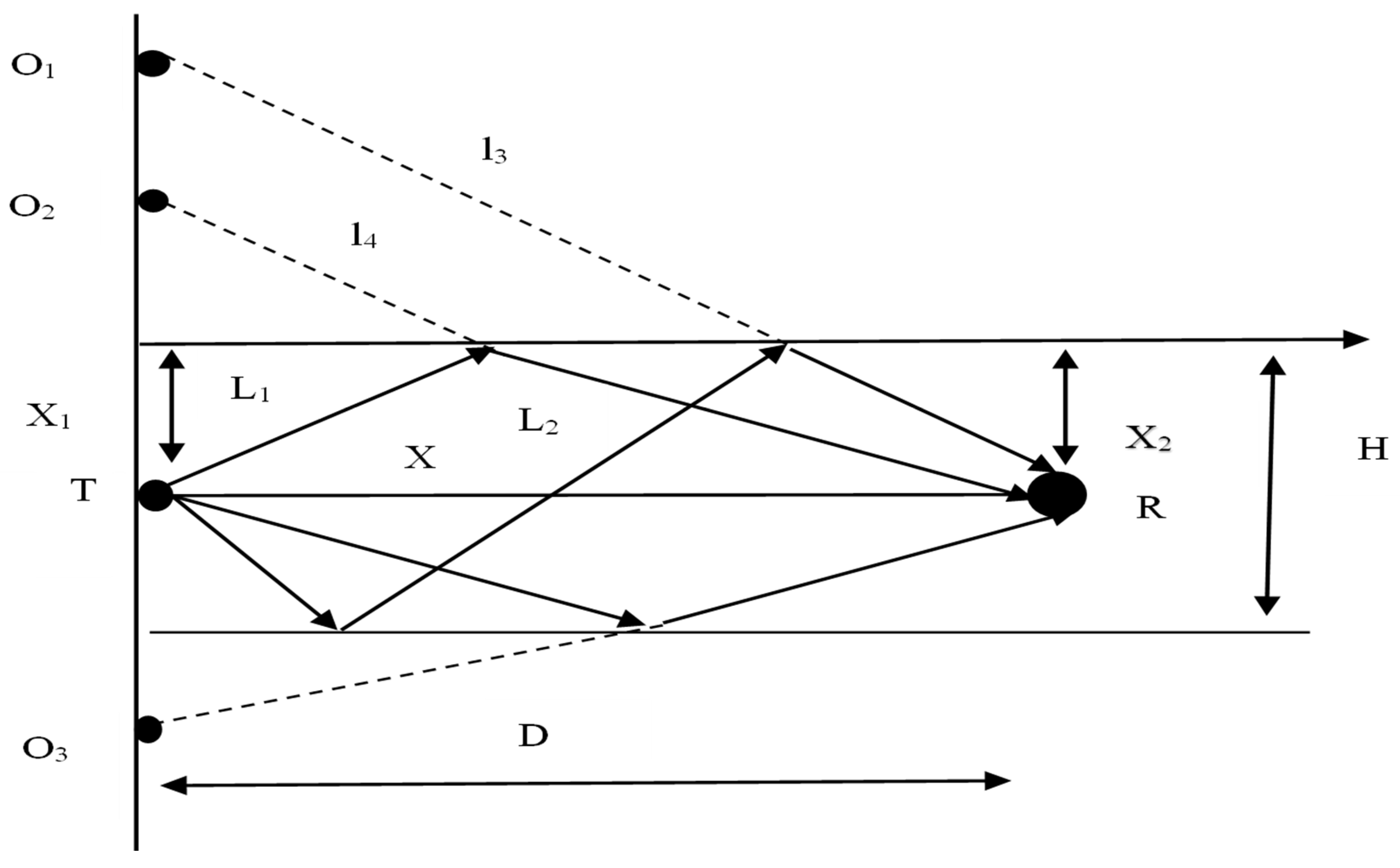
| Parameter | Meaning |
|---|---|
| D | Distance between the sound source and the receiver |
| X1 | Distance between the transmitter and the water surface |
| X2 | Distance between the receiver and the water surface |
| H | Water depth |
| T | Transmitter |
| R | Receiver |
| O1, O2, O3 | Virtual source |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Lin, L.; Zhang, R. Spectrum-Weighted Fusion Cooperative Detection Algorithm Based on Double Thresholds for Underwater Acoustic Networks. Sensors 2023, 23, 7074. https://doi.org/10.3390/s23167074
Zhang J, Lin L, Zhang R. Spectrum-Weighted Fusion Cooperative Detection Algorithm Based on Double Thresholds for Underwater Acoustic Networks. Sensors. 2023; 23(16):7074. https://doi.org/10.3390/s23167074
Chicago/Turabian StyleZhang, Jing, Liyuan Lin, and Rui Zhang. 2023. "Spectrum-Weighted Fusion Cooperative Detection Algorithm Based on Double Thresholds for Underwater Acoustic Networks" Sensors 23, no. 16: 7074. https://doi.org/10.3390/s23167074
APA StyleZhang, J., Lin, L., & Zhang, R. (2023). Spectrum-Weighted Fusion Cooperative Detection Algorithm Based on Double Thresholds for Underwater Acoustic Networks. Sensors, 23(16), 7074. https://doi.org/10.3390/s23167074