
CaFANet: Causal-Factors-Aware Attention Networks for Equipment Fault Prediction in the Internet of Things


Abstract
:1. Introduction
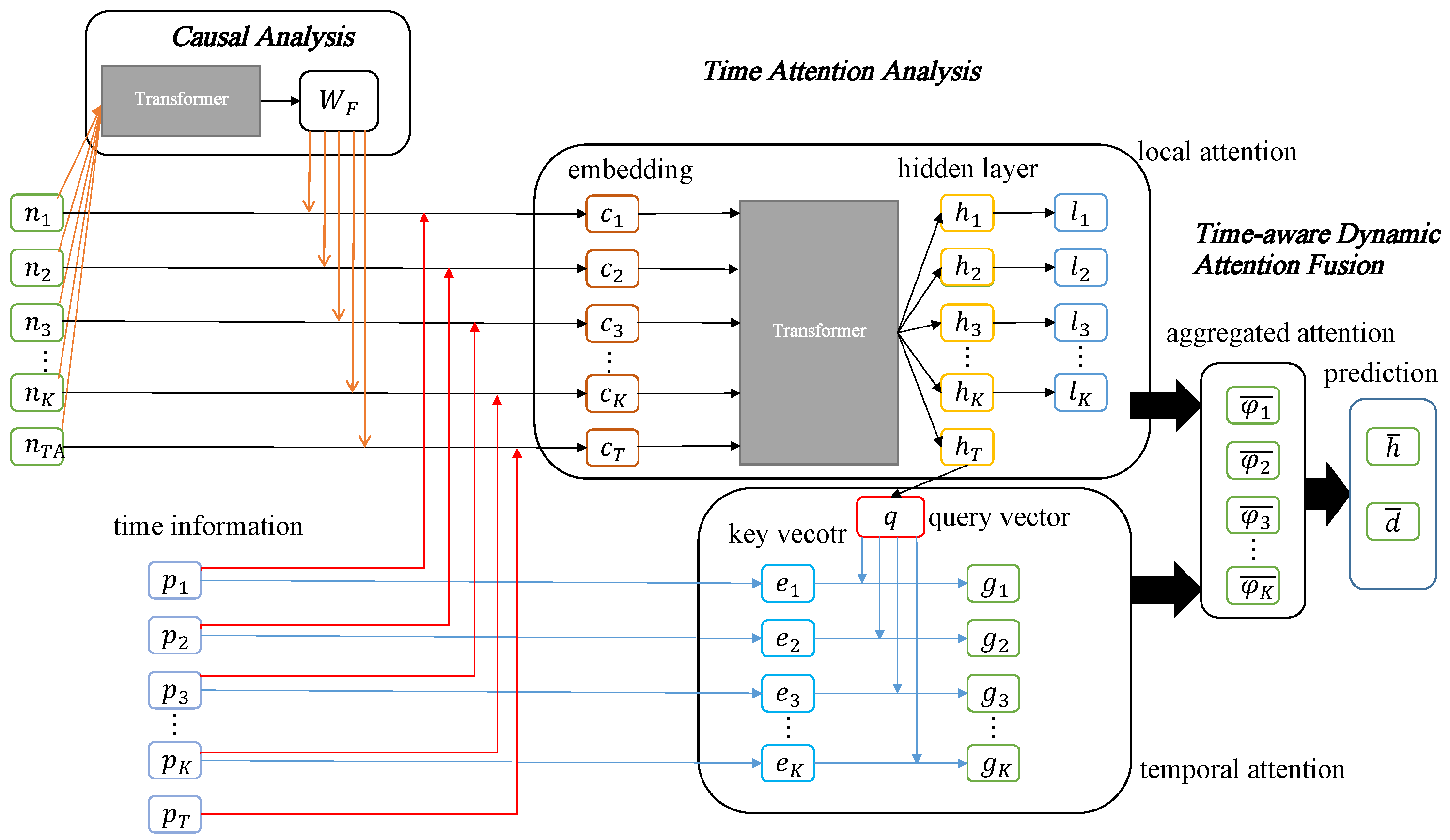
- We quantify the influence of features on the prediction accuracy via causal analysis and assign a causal influence weight to each feature according to its contributions to equipment fault prediction performance.
- We investigate the influence of features and time information on equipment fault prediction using a single-layer transformer, compute local weights and global weights accordingly, and finally obtain an aggregated attention weight for each sequence to achieve better equipment fault prediction performance.
- We evaluate the performance of CaFANet using a publicly available equipment fault prediction dataset. Compared with eleven classical baselines, the experimental results validate the effectiveness and efficiency of CaFANet.
2. Related Work
3. System Model
4. The Proposed Prediction Framework
4.1. Preprocessing
4.2. Causal Analysis
4.3. Time Attention Analysis
4.4. Attention Fusion Strategy
5. Experimental Evaluation
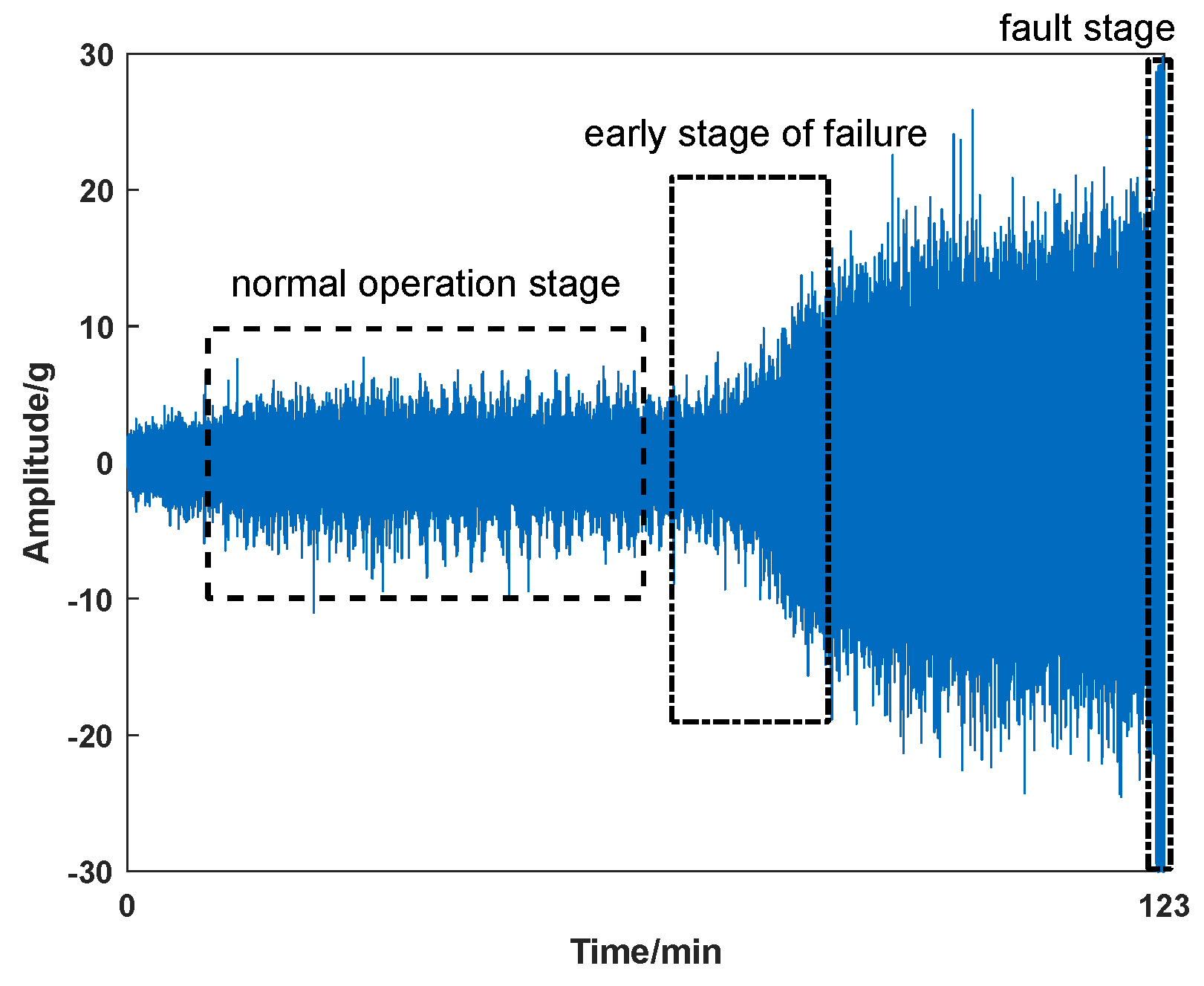
5.1. Dataset and Data Preprocessing
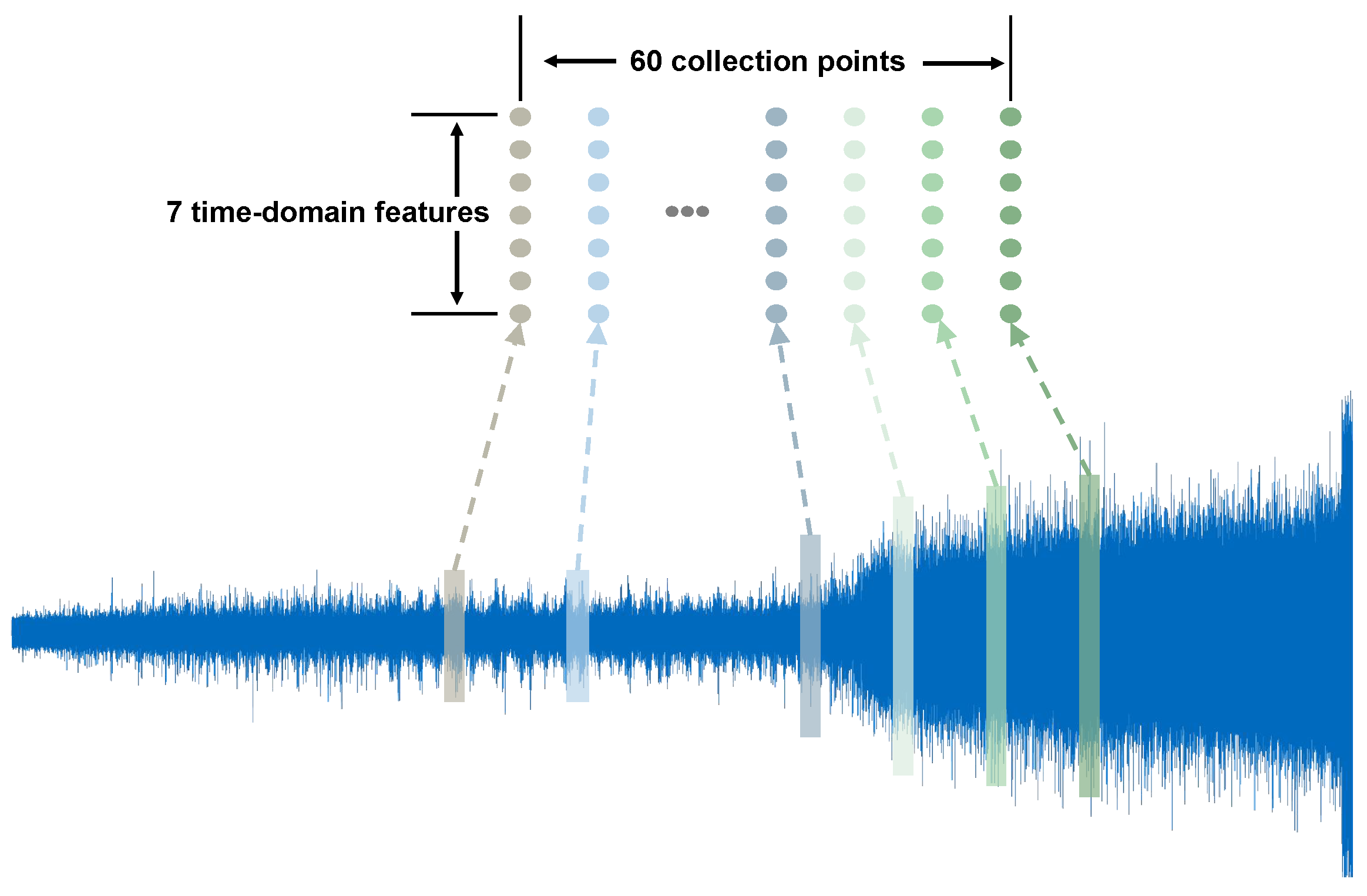
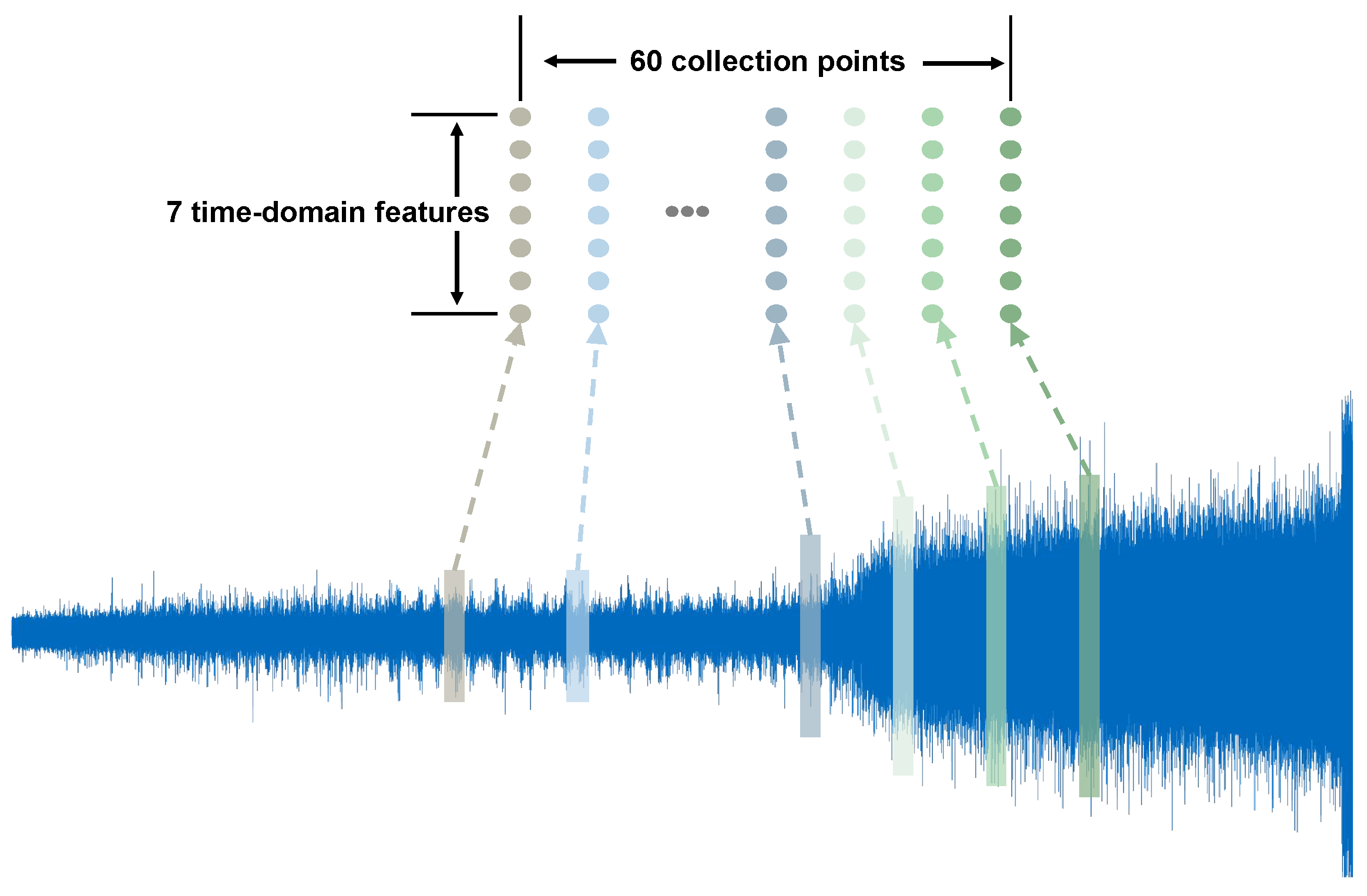
5.2. Time-Domain Signal Features
- Variance (VAR). The VAR is used to measure the statistical dispersion of the signal. The larger the variance, the greater the signal variation. The smaller the variance, the smaller the signal fluctuation.
- Root Mean Square (RMS). The RMS is not sensitive to early vibration signals but has good stability.
- Average Value (AV). The AV can be used to measure the stability of signals and reflect the static properties of signal fluctuations.
- Kurtosis (KU). KU can be used to measure the probability distribution of random variables. KU has good performance for faults with pulse signals. However, KU fails and have poor stability when a fault occurs.
- Skewness (SK). SK can be used to measure the degree and direction of data distribution deviation and can characterize the degree of numerical asymmetry distribution. SK has good performance in the early fault stage but fails after a fault occurs.
- Crest Factor (CF). The CF is defined as the ratio of the peak to the rectified average value and can be used to judge whether there are pulses in the signal.
- Margin Factor (MF). The MF is defined as the ratio of the signal peak to the root square amplitude and is more sensitive to changes in the signal.
5.3. Experiments Settings
5.4. Metrics
5.5. Baselines
- The third category of baselines was algorithms that have achieved good performance in bearing fault prediction in recent years. CNN (Convolutional Neural Network) [29] is the classical and effective classification algorithm. DFC-CNN (Deep Fully Convolutional Neural Network) [30] is based on CNN and spectrogram transform for prediction. CNN-LSTM (multiscale CNN and LSTM) [31] can learn the original signal and encode it directly. GRU-HA (Gate Recurrent Unit and Hybrid Autoencoder) [32] can automatically learn the features of sequences. DA-AE (Deep Wavelet Autoencoder) [33] is an unsupervised learning algorithm and uses the original vibration signal for training.
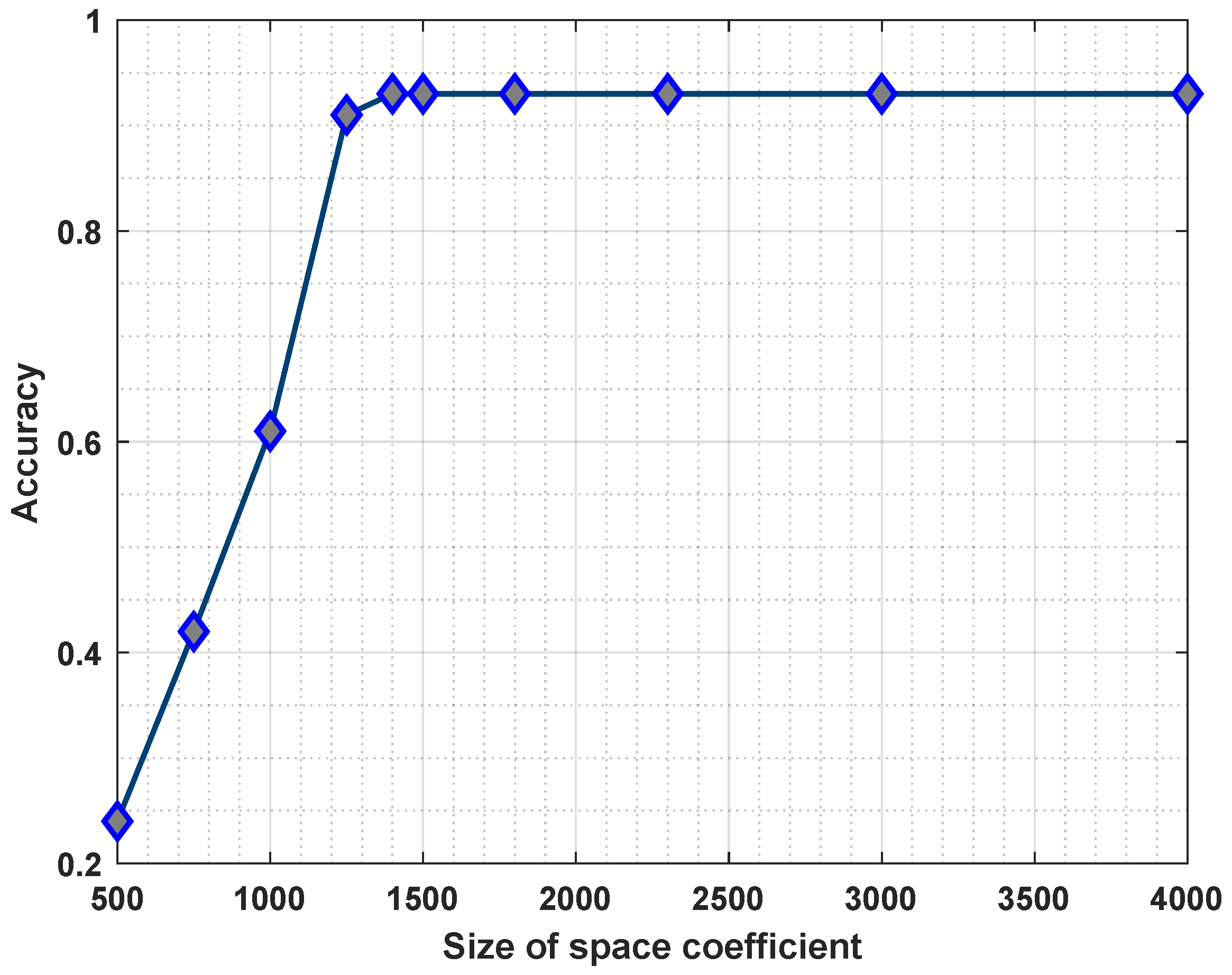
5.6. Performance Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CaFANet | Causal-Factor-Aware Attention Networks for Equipment Fault Prediction |
| SVM | Support Vector Machine |
| LR | Linear Regression |
| RF | Random Forest |
| LSTM | Long Short-Term Memory |
| GRU | Gated Recurrent Unit |
| DA-RNN | Dual-stage Attention-based Recurrent Neural Network |
| CNN | Convolutional Neural Network |
| DEF-CNN | Deep Fully Convolutional Neural Network |
| CNN-LSTM | Multiscale CNN and LSTM |
| GRU-HA | Gate Recurrent Unit and Hybrid Autoencoder |
| DA-AE | Deep Wavelet Autoencoder |
References
- Peng, Y.; Liu, D.; Peng, X. A Review: Prognostics and Health Management. J. Electron. Meas. Instrum. 2010, 24, 1–9. [Google Scholar]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A Review on Empirical Mode Decomposition in Fault Diagnosis of Rotating Machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Li, S.; Xin, Y.; Li, X.; Wang, J.; Xu, K. A Review on the Signal Processing Methods of Rotating Machinery Fault Diagnosis. In Proceedings of the 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC 2019), Chongqing, China, 24–26 May 2019; pp. 1559–1565. [Google Scholar]
- Gong, R.K.; Ma, L.; Zhao, Y.J.; Yang, P.P.; Chen, L. Fault Diagnosis for Power Transformer based on Quantum Neural Network Information Fusion. Power Syst. Prot. Control 2011, 39, 79–84. [Google Scholar]
- Zhang, Q.; Wang, H.; Jing, W.; Mao, J.; Yuan, Z.; Hu, D. Shearer’s Coal-rock Recognition System based on Fuzzy Neural Network Information Fusion. China Mech. Eng. 2016, 27, 201. [Google Scholar]
- Nan, X.; Zhang, B.; Liu, C.; Gui, Z.; Yin, X. Multi-Modal Learning-Based Equipment Fault Prediction in the Internet of Things. Sensors 2022, 22, 6722. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.; Yairi, T. A Review on the Application of Deep Learning in System Health Management. Mech. Syst. Signal Process. 2018, 107, 241–265. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines with Unlabeled Data. IEEE Trans. Ind. Electron. 2018, 66, 7316–7325. [Google Scholar] [CrossRef]
- Hmida, F.B.; Khémiri, K.; Ragot, J.; Gossa, M. Three-stage Kalman Filter for State and Fault Estimation of Linear Stochastic Systems with Unknown Inputs. J. Frankl. Inst. 2012, 349, 2369–2388. [Google Scholar] [CrossRef]
- Jaise, J.; Ajay Kumar, N.B.; Siva Shanmugam, N.; Sankaranarayanasamy, K.; Ramesh, T. Power System: A Reliability Assessment Using FTA. Int. J. Syst. Assur. Eng. Manag. 2013, 4, 78–85. [Google Scholar] [CrossRef]
- Wang, X.; He, Q. Machinery Fault Signal Reconstruction Using Time-Frequency Manifold. In Engineering Asset Management-Systems, Professional Practices and Certification, Proceedings of the 8th World Congress on Engineering Asset Management (WCEAM 2013) & the 3rd International Conference on Utility Management & Safety (ICUMAS), Hong Kong, China, 30 October–1 November 2013; Springer: Berlin/Heidelberg, Germany, 2014; pp. 777–787. [Google Scholar]
- Cheng, Y.; Yuan, H.; Liu, H.; Lu, C. Fault Diagnosis for Rolling Bearing based on SIFT-KPCA and SVM. Eng. Comput. 2017, 34, 53–65. [Google Scholar] [CrossRef]
- Shi, J.; Ma, J.; Niu, J.; Wang, E. An Intelligent Fault Diagnosis Expert System based on Fuzzy Neural Network. Vib. Shock 2017, 36, 164–171. [Google Scholar]
- Zhang, G.; Wang, H.; Zhang, T.Q. Stochastic Resonance of Coupled Time-delayed System with Fluctuation of Mass and Frequency and its Application in Bearing Fault Diagnosis. J. Cent. South Univ. 2021, 28, 2931–2946. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, W.; Jia, M. A Bearing Fault Feature Extraction Method based on Optimized Singular Spectrum Decomposition and Linear Predictor. Meas. Sci. Technol. 2021, 32, 115023. [Google Scholar] [CrossRef]
- Ding, Y.; Zhuang, J.; Ding, P.; Jia, M. Self-supervised Pretraining via Contrast Learning for Intelligent Incipient Fault Detection of Bearings. Reliab. Eng. Syst. Saf. 2022, 218, 108126. [Google Scholar] [CrossRef]
- Zhao, X.; Qin, Y.; Fu, H.; Jia, L.; Zhang, X. Blind Source Extraction based on EMD and Temporal Correlation for Rolling Element Bearing Fault Diagnosis. Smart Resilient Transp. 2021, 3, 52–65. [Google Scholar] [CrossRef]
- Li, J.; Wu, C.; Song, R.; Li, Y.; Xie, W.; He, L.; Gao, X. Deep Hybrid 2-D-3-D CNN based on Dual Second-order Attention with Camera Spectral Sensitivity Prior for Spectral Super-resolution. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 623–634. [Google Scholar] [CrossRef]
- Wang, Y.; Menkovski, V.; Wang, H.; Du, X.; Pechenizkiy, M. Causal Discovery from Incomplete Data: A Deep Learning Approach. arXiv 2020, arXiv:2001.05343. [Google Scholar]
- Carlos, A.C.; Eduardo, R.M.; Juan, V.C.; Andrés, F.R. Granger-causality: An Efficient Single User Movement Recognition Using a Smartphone Accelerometer Sensor. Pattern Recognit. Lett. 2019, 125, 576–583. [Google Scholar]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2018, 69, 401–412. [Google Scholar] [CrossRef]
- Diederik, P.; Jimmy, B. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Wang, L. Support Vector Machines: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; Volume 177. [Google Scholar]
- Seber, G.A.; Lee, A.J. Linear Regression Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2003; Volume 330. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and Regression by RandomForest. R News 2002, 2, 18–22. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Li, J.; Liu, Y.; Li, Q. Intelligent Fault Diagnosis of Rolling Bearings Under Imbalanced Data Conditions Using Attention-based Deep Learning Method. Measurement 2022, 189, 110500. [Google Scholar] [CrossRef]
- Zhang, J.; Yi, S.; Liang, G.; Hongli, G.; Xin, H.; Hongliang, S. A New Bearing Fault Diagnosis Method based on Modified Convolutional Neural Networks. Chin. J. Aeronaut. 2020, 33, 439–447. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, F.; Chen, W.; Jiang, Y.; Song, D. Fault State Recognition of Rolling Bearing based Fully Convolutional Network. Comput. Sci. Eng. 2018, 21, 55–63. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing Fault Diagnosis base on Multi-scale CNN and LSTM Model. J. Intell. Manuf. 2021, 32, 971–987. [Google Scholar] [CrossRef]
- Che, C.; Wang, H.; Fu, Q.; Ni, X. Intelligent Fault Prediction of Rolling Bearing based on Gate Recurrent Unit and Hybrid Autoencoder. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 1106–1114. [Google Scholar] [CrossRef]
- Shao, H.; Hongkai, J.; Li, X.; Wu, S. Intelligent Fault Diagnosis of Rolling Bearing Using Deep Wavelet Auto-encoder with Extreme Learning Machine. Knowl.-Based Syst. 2018, 140, 1–14. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Dataset 1 | Dataset 2 | Dataset 3 | Dataset 4 |
|---|---|---|---|---|
| SVM | 0.901 | 0.893 | 0.861 | 0.855 |
| RF | 0.883 | 0.876 | 0.856 | 0.847 |
| LR | 0.896 | 0.847 | 0.768 | 0.749 |
| LSTM | 0.887 | 0.910 | 0.858 | 0.839 |
| GRU | 0.870 | 0.902 | 0.847 | 0.826 |
| CNN | 0.885 | 0.882 | 0.887 | 0.829 |
| DFC-CNN | 0.897 | 0.896 | 0.892 | 0.852 |
| DA-RNN | 0.892 | 0.885 | 0.889 | 0.876 |
| CNN-LSTM | 0.899 | 0.894 | 0.899 | 0.868 |
| GRU-HA | 0.916 | 0.911 | 0.900 | 0.892 |
| DW-AE | 0.922 | 0.915 | 0.904 | 0.896 |
| CaFANet | 0.930 | 0.924 | 0.913 | 0.902 |
| Methods | Acc | Pre | Reacll |
|---|---|---|---|
| SVM | 0.893 | 0.884 | 0.899 |
| RF | 0.876 | 0.895 | 0.864 |
| LR | 0.847 | 0.861 | 0.839 |
| LSTM | 0.910 | 0.924 | 0.898 |
| GRU | 0.902 | 0.935 | 0.877 |
| CNN | 0.882 | 0.901 | 0.869 |
| DFC-CNN | 0.896 | 0.906 | 0.892 |
| DA-RNN | 0.885 | 0.896 | 0.872 |
| CNN-LSTM | 0.894 | 0.899 | 0.886 |
| GRU-HA | 0.911 | 0.934 | 0.890 |
| DW-AE | 0.915 | 0.941 | 0.895 |
| CaFANet | 0.924 | 0.949 | 0.905 |
| Feature | Dataset 1 | Dataset 2 | Dataset 3 | Dataset 4 | Overall |
|---|---|---|---|---|---|
| Var | 0.0413 | 0.0398 | 0.0421 | 0.0402 | 0.0409 |
| RMS | 0.0279 | 0.0283 | 0.0265 | 0.0288 | 0.0279 |
| AV | 0.0379 | 0.0369 | 0.0357 | 0.0370 | 0.0369 |
| KU | 0.0957 | 0.0968 | 0.0912 | 0.0899 | 0.0934 |
| SK | 0.0284 | 0.0237 | 0.0256 | 0.0274 | 0.0263 |
| CF | 0.0715 | 0.0768 | 0.0742 | 0.0739 | 0.0741 |
| MF | 0.0734 | 0.0796 | 0.0722 | 0.0785 | 0.0759 |
| Models | Acc |
|---|---|
| No causal analysis | 0.883 |
| No global time attention | 0.866 |
| No embedding time information | 0.806 |
| Full model | 0.924 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gui, Z.; He, S.; Lin, Y.; Nan, X.; Yin, X.; Wu, C.Q. CaFANet: Causal-Factors-Aware Attention Networks for Equipment Fault Prediction in the Internet of Things. Sensors 2023, 23, 7040. https://doi.org/10.3390/s23167040
Gui Z, He S, Lin Y, Nan X, Yin X, Wu CQ. CaFANet: Causal-Factors-Aware Attention Networks for Equipment Fault Prediction in the Internet of Things. Sensors. 2023; 23(16):7040. https://doi.org/10.3390/s23167040
Chicago/Turabian StyleGui, Zhenwen, Shuaishuai He, Yao Lin, Xin Nan, Xiaoyan Yin, and Chase Q. Wu. 2023. "CaFANet: Causal-Factors-Aware Attention Networks for Equipment Fault Prediction in the Internet of Things" Sensors 23, no. 16: 7040. https://doi.org/10.3390/s23167040
APA StyleGui, Z., He, S., Lin, Y., Nan, X., Yin, X., & Wu, C. Q. (2023). CaFANet: Causal-Factors-Aware Attention Networks for Equipment Fault Prediction in the Internet of Things. Sensors, 23(16), 7040. https://doi.org/10.3390/s23167040