
Designing an Accurate Temperature Control System for Infrared Earth Simulators Using Semiconductor and Air Cooling Integration

Abstract
:1. Introduction
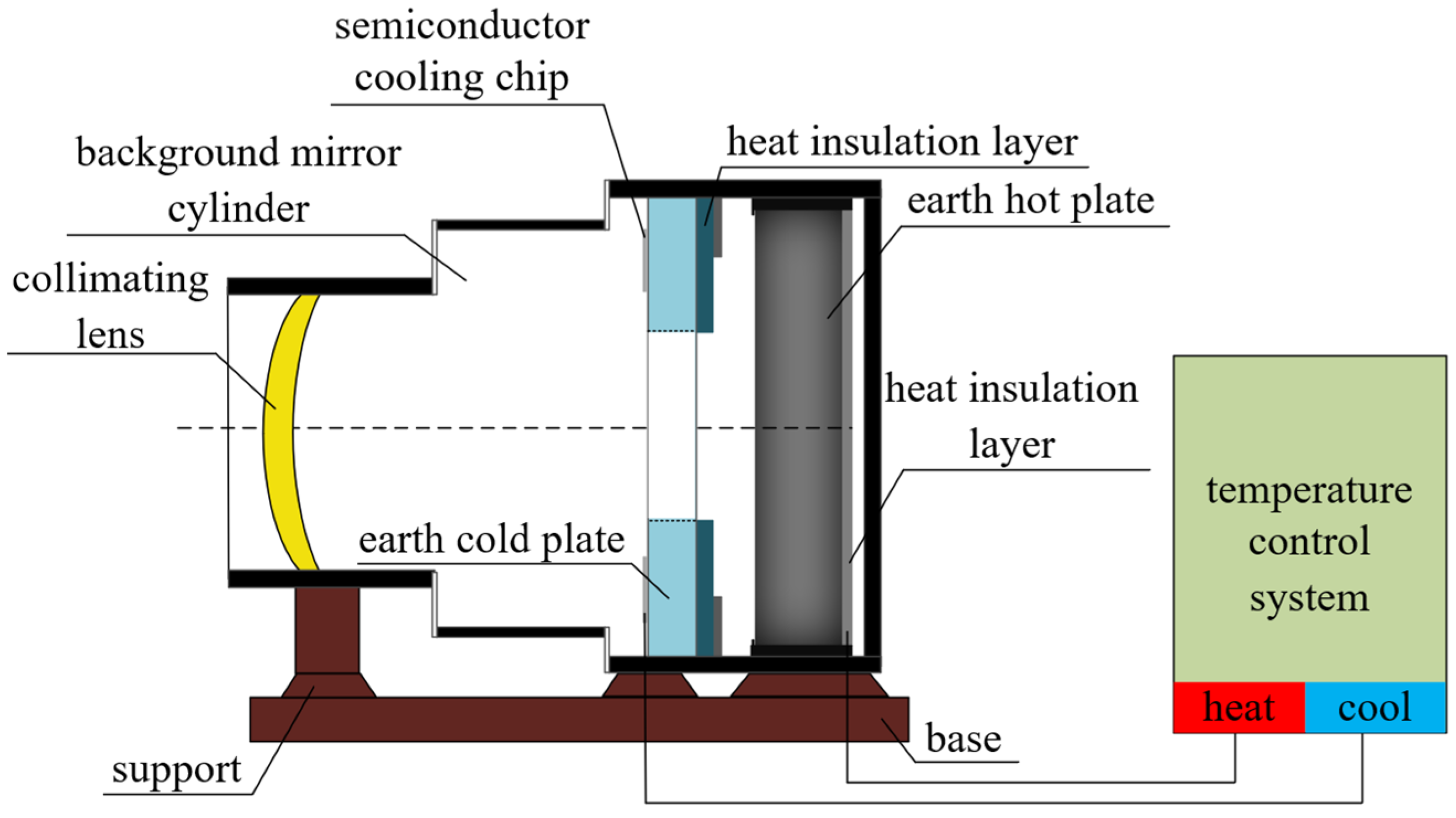
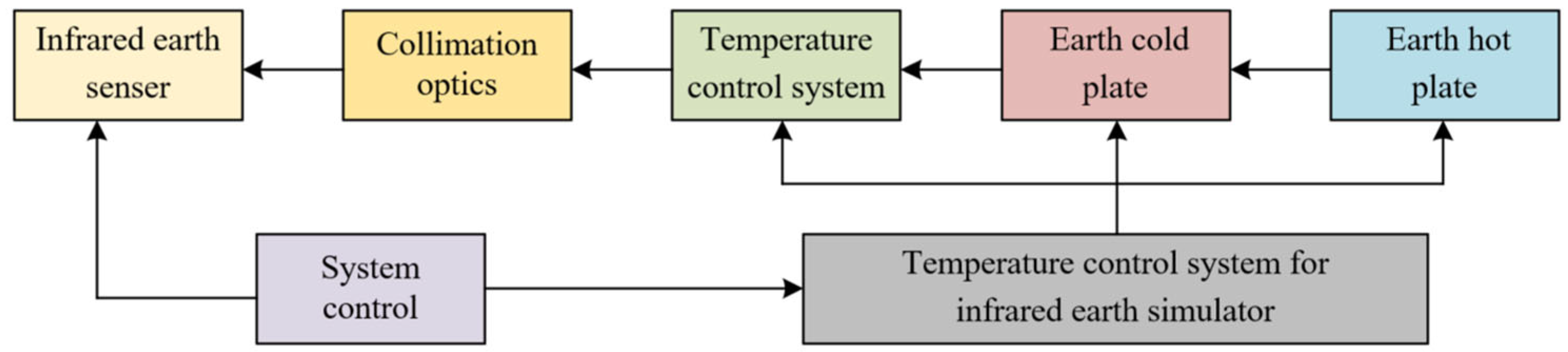
2. Infrared Earth Simulator Composition and Working Principle
3. Earth Simulator Temperature Control System Design
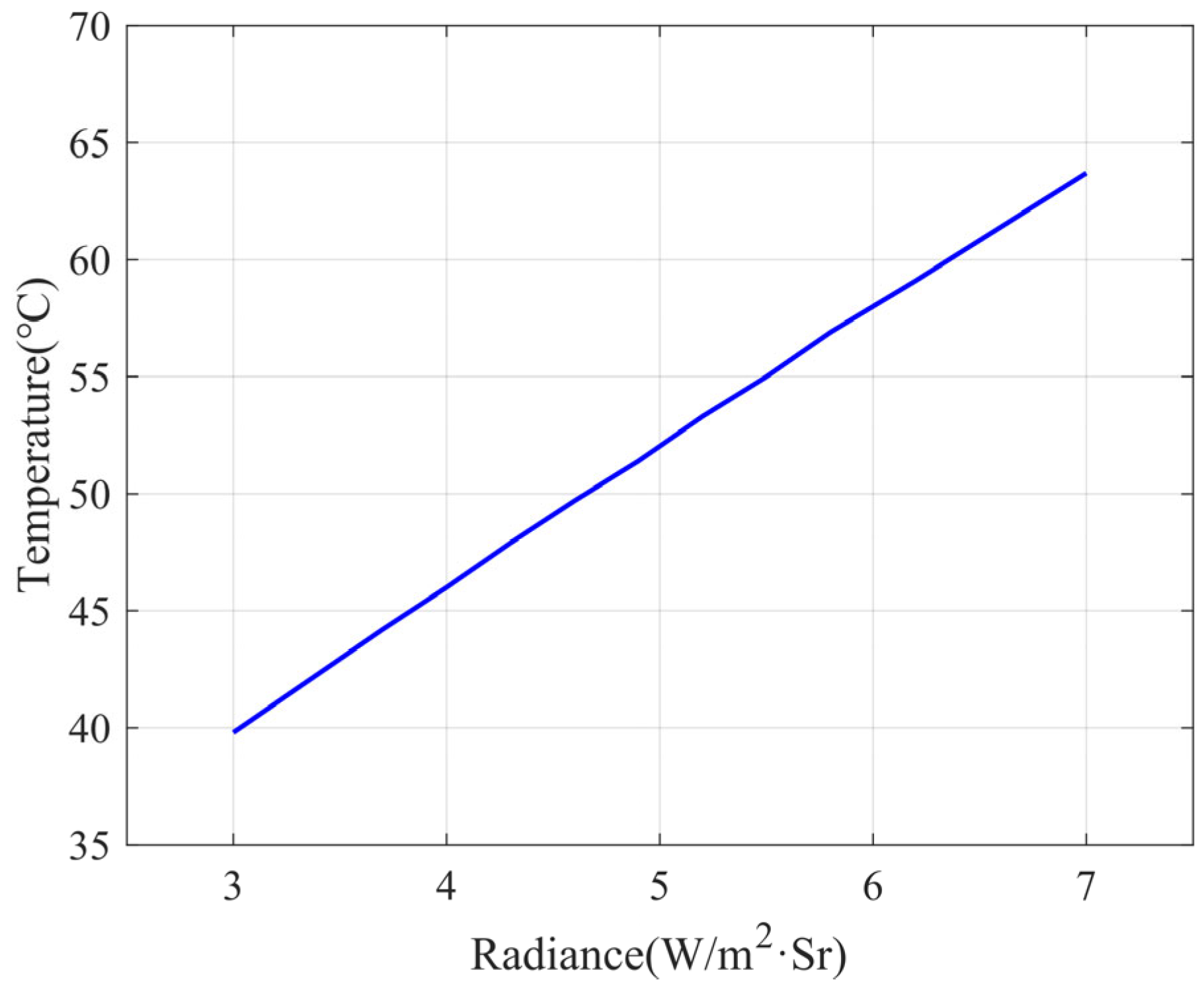
3.1. Temperature Determination
3.2. Temperature Control Algorithm
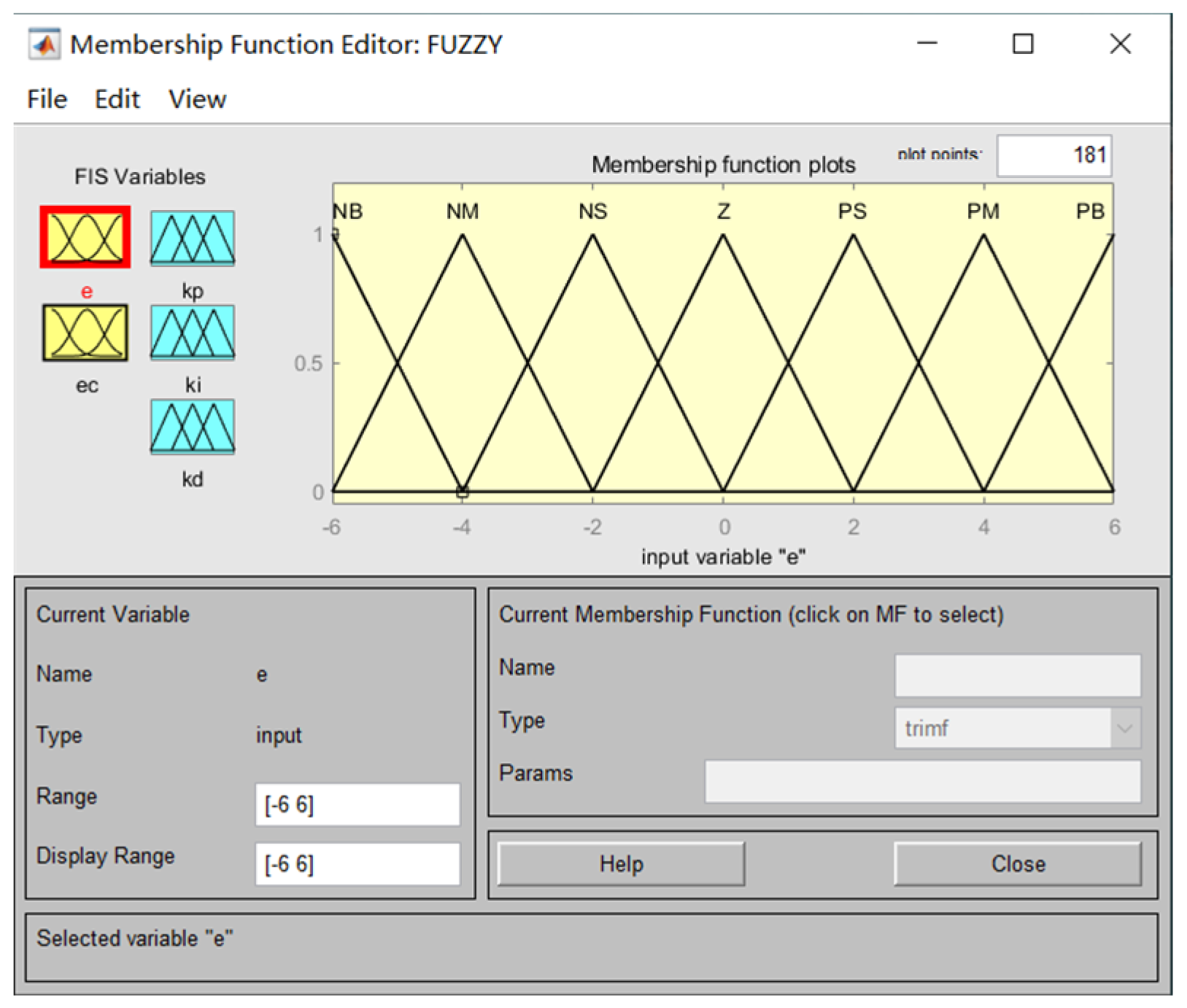
3.2.1. Fuzzy PID Control Algorithm
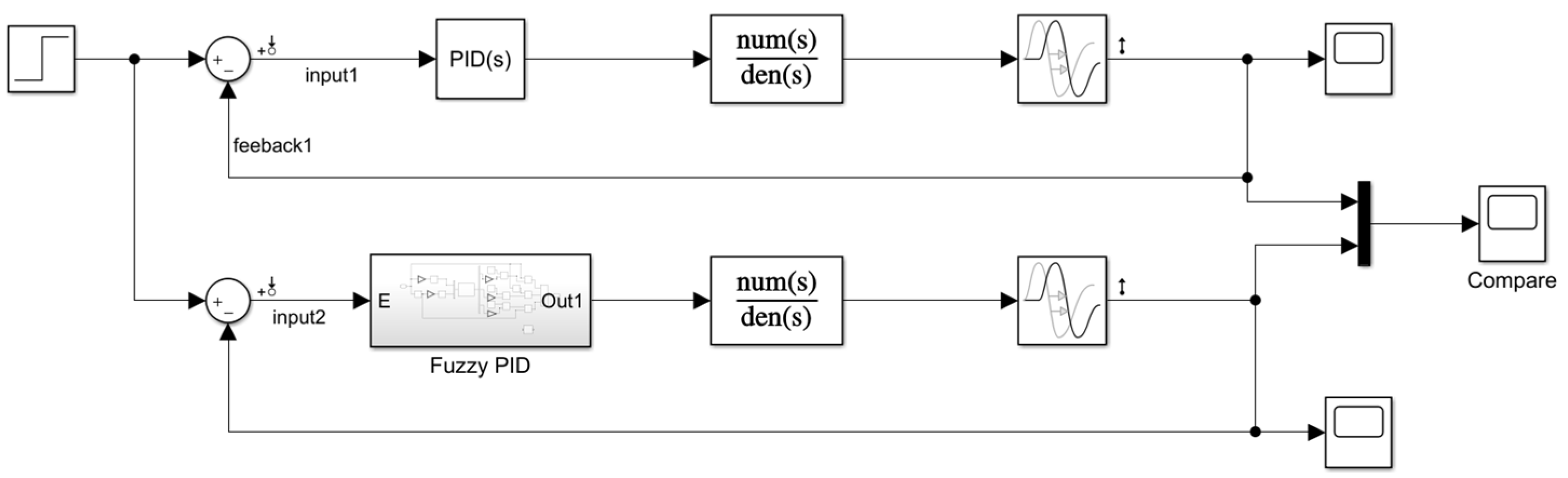
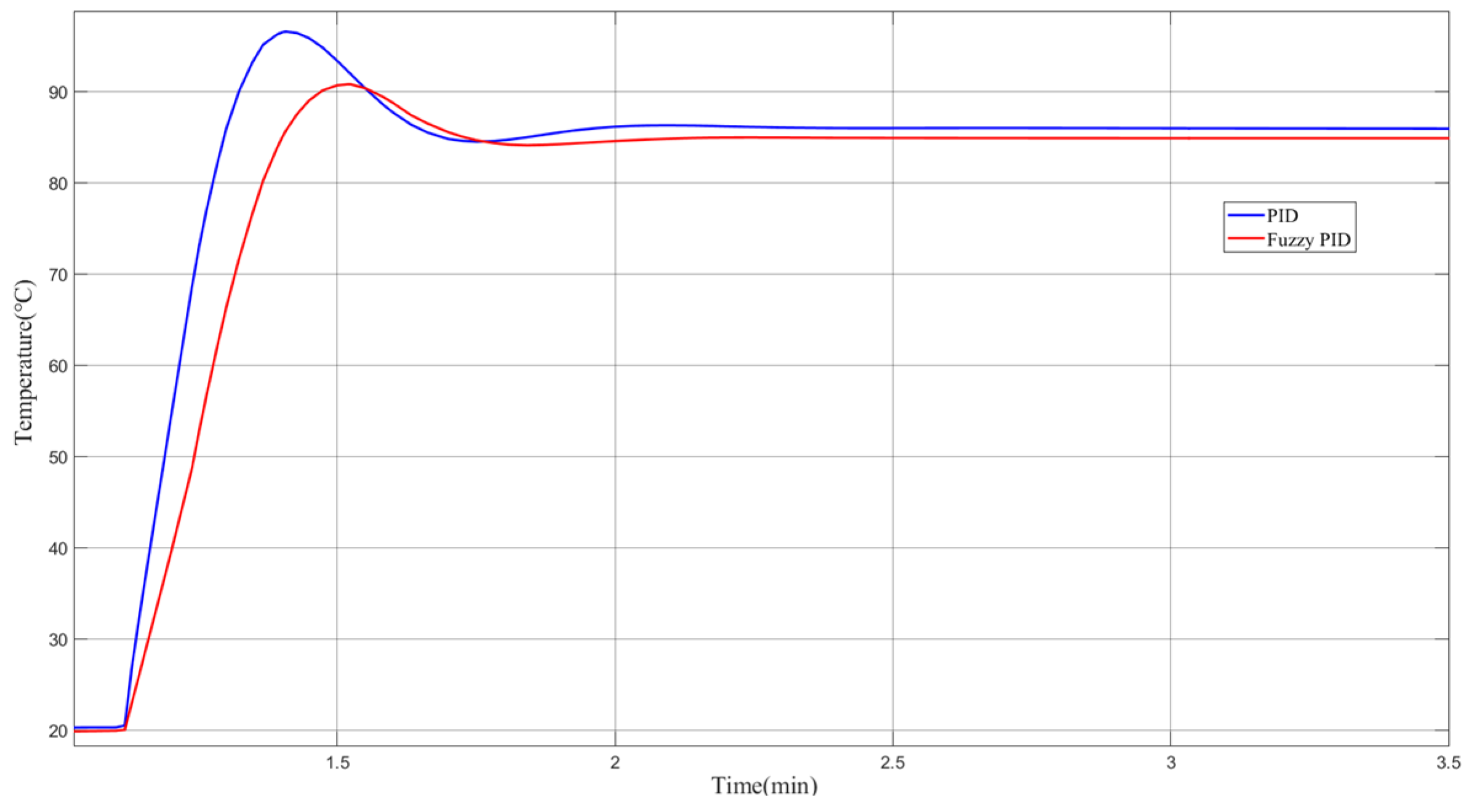
3.2.2. MATLAB Simulation
3.3. Temperature Control Module Design
3.3.1. Electric Heat Film Heating Module
3.3.2. Semiconductor Cooling Module
4. Temperature Control System Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Wang, Z.Y.; Wang, B.D.; Jin, Z.H.; Crassidis, J.L. Infrared Earth sensor with a large field of view for low-Earth-orbiting micro-satellites. Front. Inf. Technol. Electron. Eng. 2021, 22, 262–272. [Google Scholar] [CrossRef]
- Pelemeshko, A.; Kolesnikova, A.; Melkov, A.; Prokopyev, V.; Zadorozhny, A. High-precision CubeSat sun sensor coupled with infrared Earth horizon detector. IOP Conf. Ser. Mater. Sci. Eng. 2020, 734, 012012. [Google Scholar] [CrossRef]
- Yang, S.Z.; Yue, S.X.; Zhang, J.; Liu, Y.X.; Zhang, G.Y. Ultraviolet Earth Simulator Optical System Design with Wide Field and High Precision. J. Chang. Univ. Sci. Technol. 2020, 43, 14–19. [Google Scholar]
- Yu, Y.H.; Liu, S.K.; Sun, H.; Lv, H.F.; Zhou, S.B.; Jin, Y.F.; Tian, Q.; Kong, X.J.; Yin, Z.Z. An Earth Simulator for Attitude Measurement of Linear Array Infrared Earth Sensors. Patent CN106802159B, 20 November 2020. [Google Scholar]
- Li, Z.; Luo, S.; Chen, M.; Wu, H.; Wang, T.; Cheng, L. Infrared thermal imaging denoising method based on second-order channel attention mechanism. Infrared Phys. Technol. 2021, 116, 103789. [Google Scholar] [CrossRef]
- Yin, C.L.; Meng, F.; Xu, Y.N.; Yang, X.Y.; Xing, H.Q.; Fu, P.J. Developing Urban Built-up Area Extraction Method Based on Land Surface Emissivity Differences. Infrared Phys. Technol. 2020, 110, 103475. [Google Scholar] [CrossRef]
- Yan, L. Research on Small Earth Simulator Control System; Changchun University of Science and Technology: Changchun, China, 2011. [Google Scholar]
- Zhang, G.Y.; Lu, W.H.; He, X.L. Analysis on irradiation uniformity of sun simulator. Chin. J. Opt. Appl. Opt. 2009, 2, 41–45. [Google Scholar]
- Wang, L.Y.; Zhang, G.Y.; Wang, X.H. Earth simulator for electro magnetic compatibility testing of infrared earth sensor. Infrared Laser Eng. 2006, 317–322. [Google Scholar]
- Fu, D.H.; Chen, X.Y.; Liu, J.; Lu, T. Research on Temperature of the Earth Simulator. OME Inf. 2006, 27, 317–322. [Google Scholar]
- Huang, Y.Y. Teaching Planck’s quantum theory. Coll. Phys. 2020, 39, 25–28. [Google Scholar]
- Zhu, K.Y.; Tong, Z.Z.; Hua, C.L. Parallel Composite Control Method for AC Servo System of Certain Type Shipborne Rocket Launcher. Ordnance Ind. Autom. 2023, 42, 13–16+25. [Google Scholar]
- Tong, W.; Zhao, T.; Duan, Q.; Zhang, H.; Mao, Y. Non-singleton interval type-2 fuzzy PID control for high precision electro-optical tracking system. ISA Trans. 2021, 120, 258–270. [Google Scholar] [CrossRef] [PubMed]
- Omarov, B.; Anarbayev, A.; Turyskulov, U.; Orazbayev, E.; Erdenov, M.; Ibrayev, A.; Kendzhaeva, B. Fuzzy-PID based self-adjusted indoor temperature control for ensuring thermal comfort in sport complexes. J. Theor. Appl. Inf. Technol. 2020, 98, 1–12. [Google Scholar]
- Ren, X.R.; Ma, L.X. Research on Main Steam Temperature Control System Based on Fuzzy PID Load Tracking. Electron. Sci. Technol. 2021, 34, 18–23. [Google Scholar]
- Chu, C.W.; Zhu, Z.C.; Bian, H.T.; Jiang, J.C. Design of self-heating test platform for sulfide corrosion and oxidation based on Fuzzy PID temperature control system. Meas. Control J. Inst. Meas. Control 2021, 54, 1082–1096. [Google Scholar] [CrossRef]
- Hao, W.B.; Feng, T.Y.; Huang, S.M.; Jie, C.; Wangwu, Z. Temperature control design of drying room based on fuzzy PID control. J. Chin. Agric. Mech. 2021, 42, 101–106. [Google Scholar]
- Xu, S.J. Research and Implementation of Parallel Fuzzy Control Algorithm Based on FPGA; University of Chinese Academy of Sciences: Beijing, China, 2022. [Google Scholar]
- Huang, Y.; Chen, Z.; Ding, H. Performance optimization of a two-stage parallel thermoelectric cooler with inhomogeneous electrical conductivity. Appl. Therm. Eng. 2021, 192, 116696. [Google Scholar] [CrossRef]
- Nie, L.Y. Research on Heat Dissipation Method of Semiconductor Refrigeration System Based on Solar Energy; Jilin University: Changchun, China, 2022. [Google Scholar]
- Ding, X.M. Research and Design of Novel Semiconductor Cooling Protective Suit; Xi’an University of Science and Technology: Xi’an, China, 2018. [Google Scholar]
- Hu, J.; Zhi, X.; Gong, J.; Yin, Z.; Fan, Z. Error tolerance and effects analysis of satellite vibration characteristics and measurement error on TDICCD image restoration. Infrared Phys. Technol. 2018, 93, 277–285. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TEC Model | Max. Temperature Difference Current (A) | Max. Temperature Difference Voltage (V) | Max. Temperature Difference (°C) | Max. Cooling Power (W) | Dimension (mm) | Temperature Use Range (°C) |
|---|---|---|---|---|---|---|
| TEC1-19908 | 8.0 | 24.6 | 68 | 111 | 40 × 40 | −60~200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, L.; Li, G.; Mu, S. Designing an Accurate Temperature Control System for Infrared Earth Simulators Using Semiconductor and Air Cooling Integration. Sensors 2023, 23, 6908. https://doi.org/10.3390/s23156908
Li J, Wang L, Li G, Mu S. Designing an Accurate Temperature Control System for Infrared Earth Simulators Using Semiconductor and Air Cooling Integration. Sensors. 2023; 23(15):6908. https://doi.org/10.3390/s23156908
Chicago/Turabian StyleLi, Jiachong, Lingyun Wang, Guangxi Li, and Sida Mu. 2023. "Designing an Accurate Temperature Control System for Infrared Earth Simulators Using Semiconductor and Air Cooling Integration" Sensors 23, no. 15: 6908. https://doi.org/10.3390/s23156908
APA StyleLi, J., Wang, L., Li, G., & Mu, S. (2023). Designing an Accurate Temperature Control System for Infrared Earth Simulators Using Semiconductor and Air Cooling Integration. Sensors, 23(15), 6908. https://doi.org/10.3390/s23156908