
Estimation of Target Motion Parameters from the Tonal Signals with a Single Hydrophone

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods to Estimate the Motion Parameters
2.1. Sound Field Interference Theory
2.2. Doppler Shift and Doppler-Warping Transformation
2.3. Target Motion Parameter Estimation Step
- Select one of two similar frequency signals with Doppler shifts in the received signal low-frequency analysis recording (LOFAR) plot and select the upper and lower limit frequencies of the tones.
- The speed of sound in water c is known; the search grid v = [v1, v2,..., vn] and = [r1, r2,..., rm], where n and m are the v and search grid dimensions, respectively.
- Select the (v,) combinations in the search grid and use the Doppler-warping operator (Equation (18)) to resample the original signal.
- The fast Fourier transform (FFT) algorithm is used for the resampled signal to obtain the spectrum . Select the upper and lower limits of the frequency band to be analyzed and calculate the spectral entropy function SD within the frequency band.
- Repeat steps (3) and (4) until the full v, mesh search is completed.
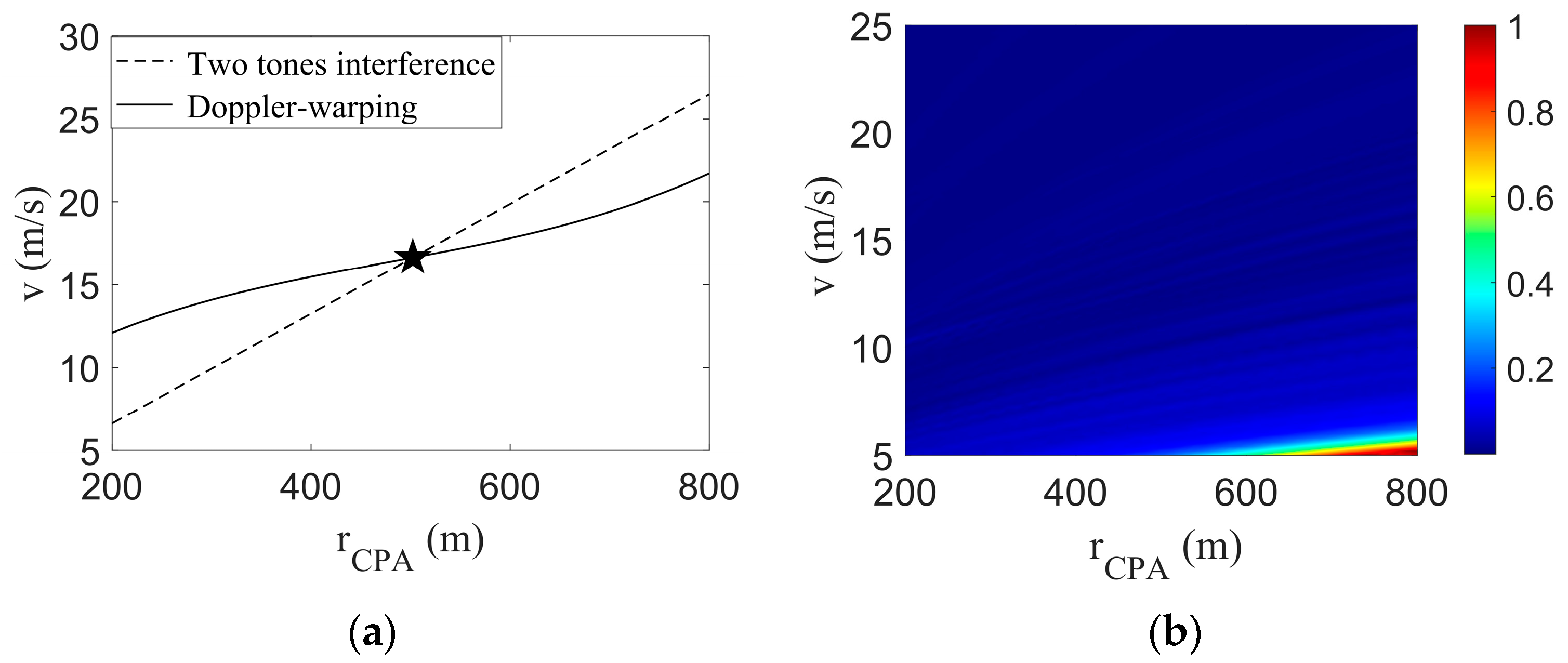
- The two-dimensional color plot is drawn according to the cost function SD, and the minimum value of searched at each grid is selected. These values are employed in the triple polynomial fit to obtain the parametric coupling curve.
- The (v,) combination that minimizes the Doppler-warping transformation cost function value is selected to resample the original signal to obtain a signal without a Doppler shift.
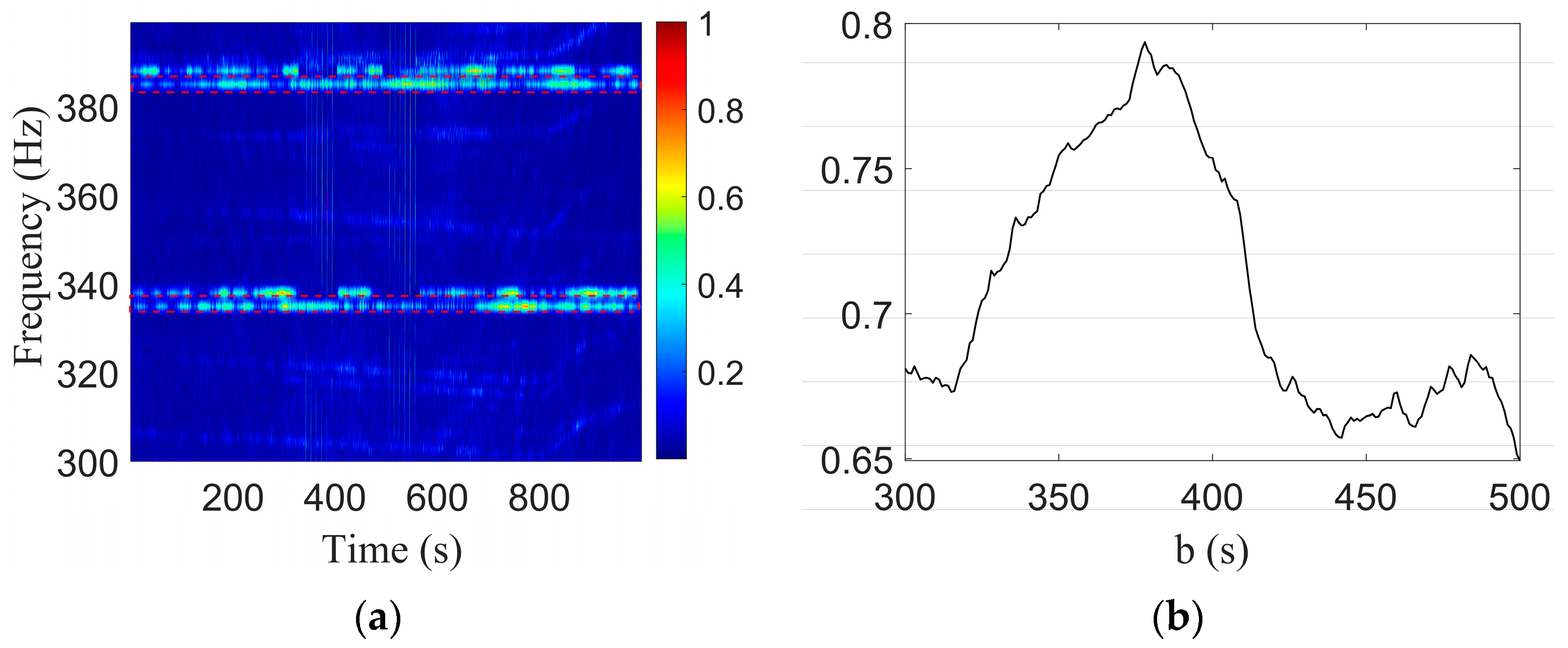
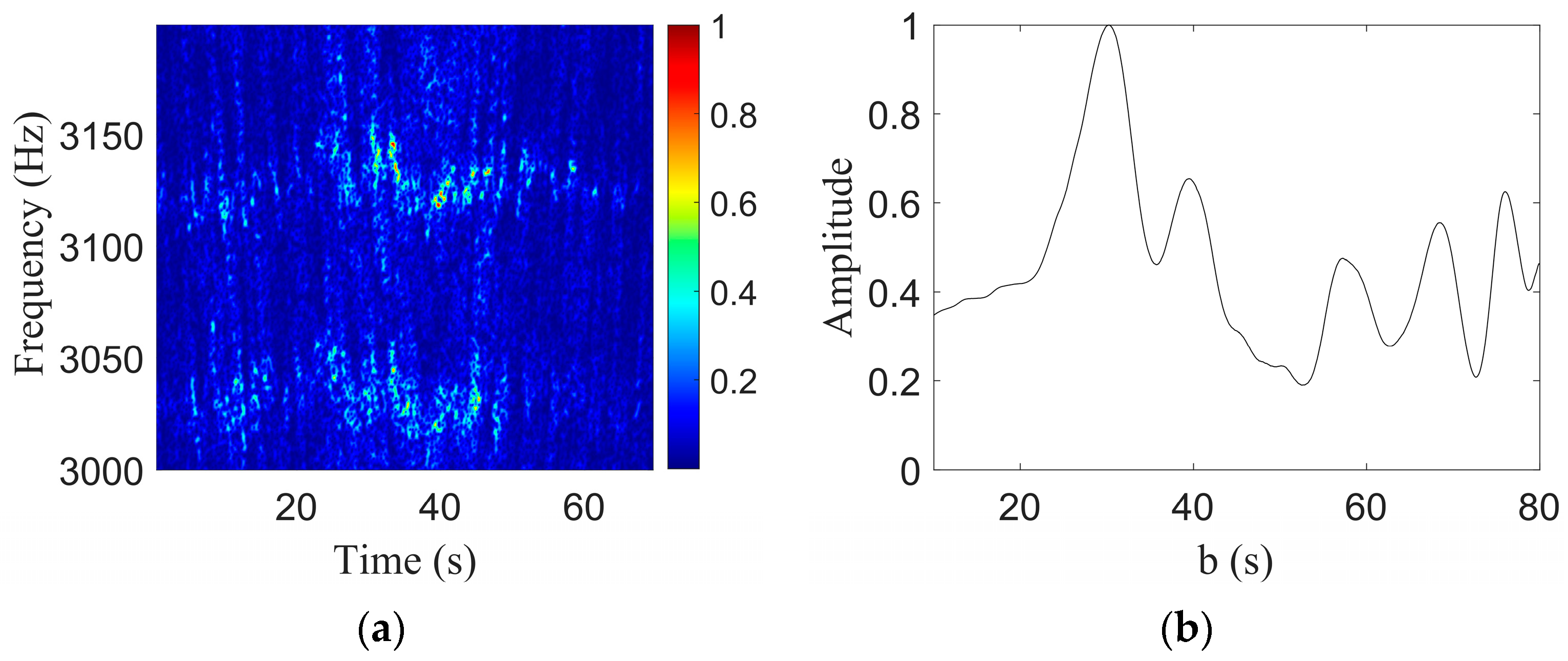
- Calculate the LOFAR plot of the signal and select the intensities of two tones and that are excited by the same acoustic source.
- Set up the search grid , where .
- Select the mesh parameters that convert t to according to Equation (8), resample the two tones in the domain, and calculate the cost function , where and are the upper limit and lower limit, respectively, after the coordinate conversion.
- Repeat steps (3) and (4) until all grid searches are complete.
- The b corresponding to the peak of the cost function is the final estimation result.
3. Results
3.1. Simulation Results
3.1.1. Theoretical Simulation
3.1.2. Method Performance Analysis
3.2. Experimental Results and Analysis
3.2.1. SwellEx-96 Experiment
3.2.2. Analysis of the Speedboat Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arrichiello, F.; Antonelli, G.; Aguiar, A.P.; Pascoal, A. An Observability Metric for Underwater Vehicle Localization Using Range Measurements. Sensors 2013, 13, 16191–16215. [Google Scholar] [CrossRef]
- Mandic, F.; Miskovic, N.; Loncar, I. Underwater acoustic source seeking using time-difference-of-arrival measurements. IEEE J. Ocean. Eng. 2020, 45, 759–771. [Google Scholar] [CrossRef]
- Alcocer, A.; Oliveira, P.; Pascoal, A. Study and implementation of an EKF GIB-based underwater positioning system. Control Eng. Pract. 2007, 15, 689–701. [Google Scholar] [CrossRef]
- Tan, Y.T.; Gao, R.; Chitre, M. Cooperative path planning for range-only localization using a single moving beacon. IEEE J. Ocean. Eng. 2014, 39, 371–385. [Google Scholar] [CrossRef]
- Gadre, A.; Stilwell, D. Toward underwater navigation based on range measurements from a single location. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 23–27 May 2004. [Google Scholar]
- Chen, V.C. Analysis of radar micro-Doppler with time-frequency transform. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, PA, USA, 14–16 August 2000. Cat. No. 00TH8496. [Google Scholar]
- Tahmoush, D. Review of micro-Doppler signatures. IET Radar Sonar Navig. 2015, 9, 1140–1146. [Google Scholar] [CrossRef]
- Amiri, R.; Shahzadi, A. Micro-Doppler based target classification in ground surveillance radar systems. Digit. Signal Prog. 2020, 101, 1051–2004. [Google Scholar] [CrossRef]
- Carter, G.C. Time delay estimation for passive sonar signal processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 463–470. [Google Scholar] [CrossRef]
- Nardone, S.C.; Lindgren, A.G.; Gong, K.F. Fundamental properties and performance of conventional bearings-only target motion analysis. IEEE Trans. Autom. Control 1984, 29, 775–787. [Google Scholar] [CrossRef]
- Bucker, H.P. Use of Calculated Sound Fields and Matched-field Detection to Locate Sound Sources in Shallow Water. J. Acoust. Soc. Am. 1976, 59, 368–373. [Google Scholar] [CrossRef]
- Chuprov, S.D. Interference structure of a sound field in a layered ocean. In Ocean Acoustics, Current State; Brekhovskikh, L.M., Andreevoi, I.B., Eds.; University of Southampton: Southampton, UK, 1982; pp. 71–79. [Google Scholar]
- Cockrell, K.L.; Schmidt, H. Robust Passive Range Estimation Using the Waveguide Invariant. J. Acoust. Soc. Am. 2010, 127, 2780–2789. [Google Scholar] [CrossRef]
- Tao, H.; Hickman, G.; Krolik, J.L. Single hydrophone passive localization of transiting acoustic sources. In Proceedings of the OCEANS 2007 Europe, Aberdeen, Scotland, 18–21 June 2007. [Google Scholar]
- Turgut, A.; Orr, M.; Rouseff, D. Broadband source localization using horizontal-beam acoustic intensity striations. J. Acoust. Soc. Am. 2010, 127, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Sun, D.; Lu, M.; Mei, J.; Wang, S.; Pei, Y. Generalized Radon transform approach to target motion parameter estimation using a stationary underwater vector hydrophone. J. Acoust. Soc. Am. 2021, 150, 952. [Google Scholar] [CrossRef] [PubMed]
- Sun, K.; Gao, D.; Gao, D.; Song, W.; Li, X. Estimation of motion parameters of underwater acoustic targets by combining Doppler shift and interference spectrum. Acta Acust. 2023, 48, 50–59. [Google Scholar]
- Arveson, P.T.; Vendittis, D.J. Radiated noise characteristics of a modern cargo ship. J. Acoust. Soc. Am. 2000, 107, 118–129. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Wan, C.R. A novel CFAR tonal detector using phase compensation. IEEE J. Ocean. Eng. 2005, 30, 900–911. [Google Scholar] [CrossRef]
- Rakotonarivo, S.T.; Kuperman, W.A. Model-Independent Range Localization of a Moving Source in Shallow Water. J. Acoust. Soc. Am. 2012, 132, 2218–2223. [Google Scholar] [CrossRef]
- Young, A.H.; Harms, H.A.; Hickman, G.W.; Rogers, J.S.; Krolik, J.L. Waveguide-Invariant-Based Ranging and Receiver Localization Using Tonal Sources of Opportunity. IEEE J. Ocean. Eng. 2020, 45, 631–644. [Google Scholar] [CrossRef]
- Harms, A.; Odom, J.L.; Krolik, J.L. Ocean acoustic waveguide invariant parameter estimation using tonal noise sources. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, 19–24 April 2015; pp. 4001–4004. [Google Scholar]
- Chi, J.; Gao, D.; Zhang, X.; Zhang, X.; Wang, Z. Motion parameter estimation of multitonal sources with a single hydrophone. JASA Express Lett. 2021, 1, 016006. [Google Scholar] [CrossRef]
- Ferguson, B.G.; Quinn, B.G. Application of the Short-time Fourier Transform and the Wigner–Ville Distribution to the Acoustic Localization of Aircraft. J. Acoust. Soc. Am. 1994, 96, 821–827. [Google Scholar] [CrossRef]
- Quinn, B.G. Doppler Speed and Range Estimation Using Frequency and Amplitude Estimates. J. Acoust. Soc. Am. 1995, 98, 2560–2566. [Google Scholar] [CrossRef]
- Xu, L.; Yang, Y.; Yu, S. Analysis of moving source characteristics using polynomial chirplet transform. J. Acoust. Soc. Am. 2015, 137, EL320. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Chen, Y.; Zhu, J.; Dai, Q.; Wu, G.; Li, Y. Steady-motion-based Dopplerlet transform: Application to the estimation of range and speed of a moving sound source. IEEE J. Ocean. Eng. 2004, 29, 887–905. [Google Scholar] [CrossRef]
- Sun, Q.; Wu, F.Y.; Yang, K.; Ma, Y. Estimation of multipath delay-Doppler parameters from moving LFM signals in shallow water. Ocean Eng. 2021, 232, 109125. [Google Scholar] [CrossRef]
- Zou, N.; He, J.; Shen, T.; Zou, W. Passive Estimation Method For Motion Parameters Of Underwater Near-Field Moving Target. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 680–684. [Google Scholar]
- Gao, D.Y.; Gao, D.Z.; Chi, J.; Wang, L.; Song, W.H. Doppler-warping transform and its application to estimating acoustic target velocity. Acta Phys. Sin. 2021, 70, 124302. [Google Scholar] [CrossRef]
- Grachev, G.A. Theory of acoustic field invariants in layered waveguides. Acoust. Phys. 1993, 39, 33–35. [Google Scholar]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Gao, D.; Zhao, X.; Guo, D.; Song, W.; Li, Y. Estimation of Target Motion Parameters from the Tonal Signals with a Single Hydrophone. Sensors 2023, 23, 6881. https://doi.org/10.3390/s23156881
Sun K, Gao D, Zhao X, Guo D, Song W, Li Y. Estimation of Target Motion Parameters from the Tonal Signals with a Single Hydrophone. Sensors. 2023; 23(15):6881. https://doi.org/10.3390/s23156881
Chicago/Turabian StyleSun, Kai, Dazhi Gao, Xiaojing Zhao, Doudou Guo, Wenhua Song, and Yuzheng Li. 2023. "Estimation of Target Motion Parameters from the Tonal Signals with a Single Hydrophone" Sensors 23, no. 15: 6881. https://doi.org/10.3390/s23156881
APA StyleSun, K., Gao, D., Zhao, X., Guo, D., Song, W., & Li, Y. (2023). Estimation of Target Motion Parameters from the Tonal Signals with a Single Hydrophone. Sensors, 23(15), 6881. https://doi.org/10.3390/s23156881