
Intelligent Traffic Model for Unmanned Ground Vehicles Based on DSDV-AODV Protocol


Abstract
:1. Introduction
2. Method
2.1. Proposed UGVs
2.2. VANET Proposed Scheme
2.3. DSDV-AODV
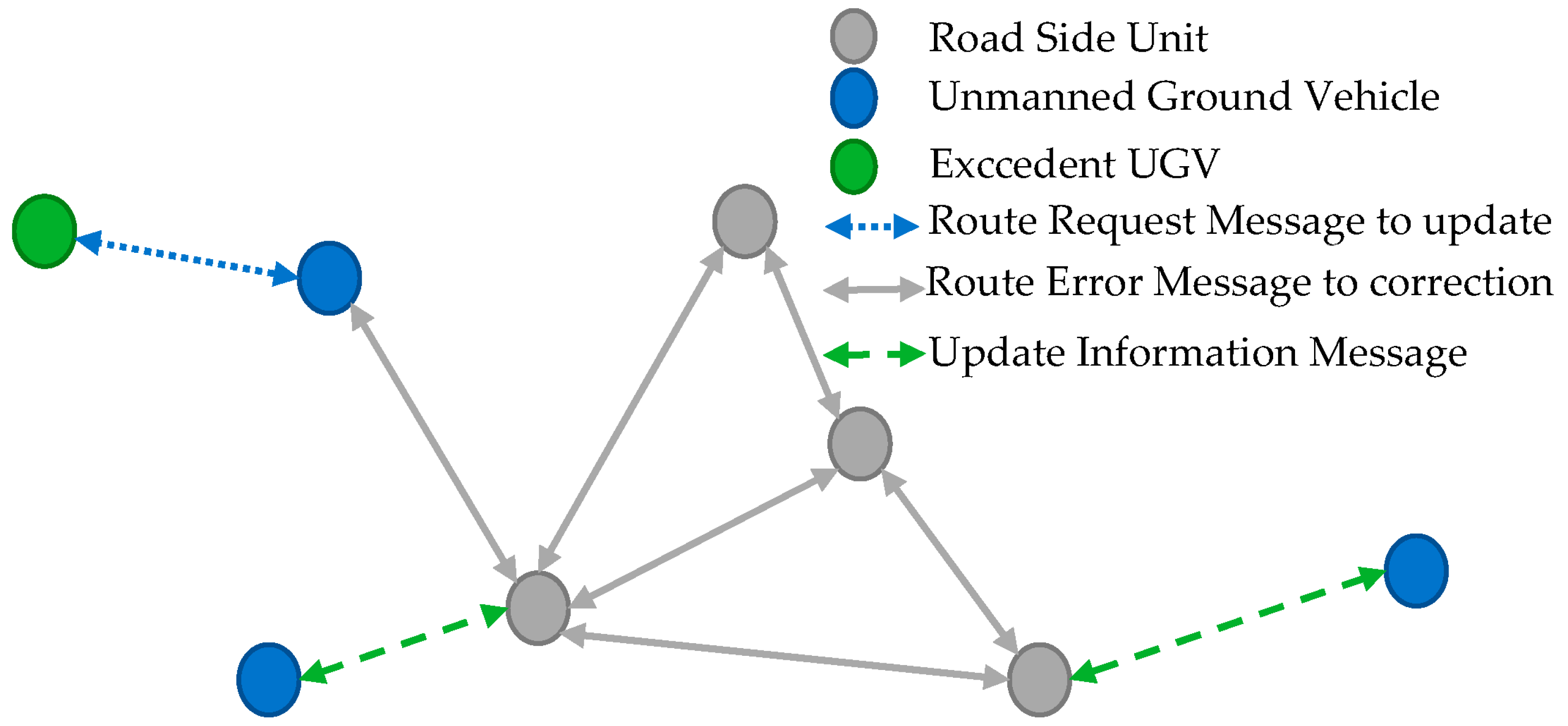
2.3.1. Work Mechanism of the Protocol
| Algorithm 1 Network middleware procedure |
| Input: accident signal |
| Output: rearrange traffic table |
| Method: Hybrid DSDV-AODV protocol |
| Protocol table: all accessible destinations || the number of hops required to get there || the node sequence number. |
| Receive traffic information period updates |
| If an accident signal is active then |
| If the shortest path found in the RSU routing table |
| ------DSDV (proactive) protocol------- |
| renew the alternative short path record in the table by replacing the sequence number |
| Else |
| -------AODV (reactive) protocol-------- |
| creating a route constraint on demand and the most recent item in the routing table |
| End If |
| Else |
| Notify no change on the cluster |
| End If |
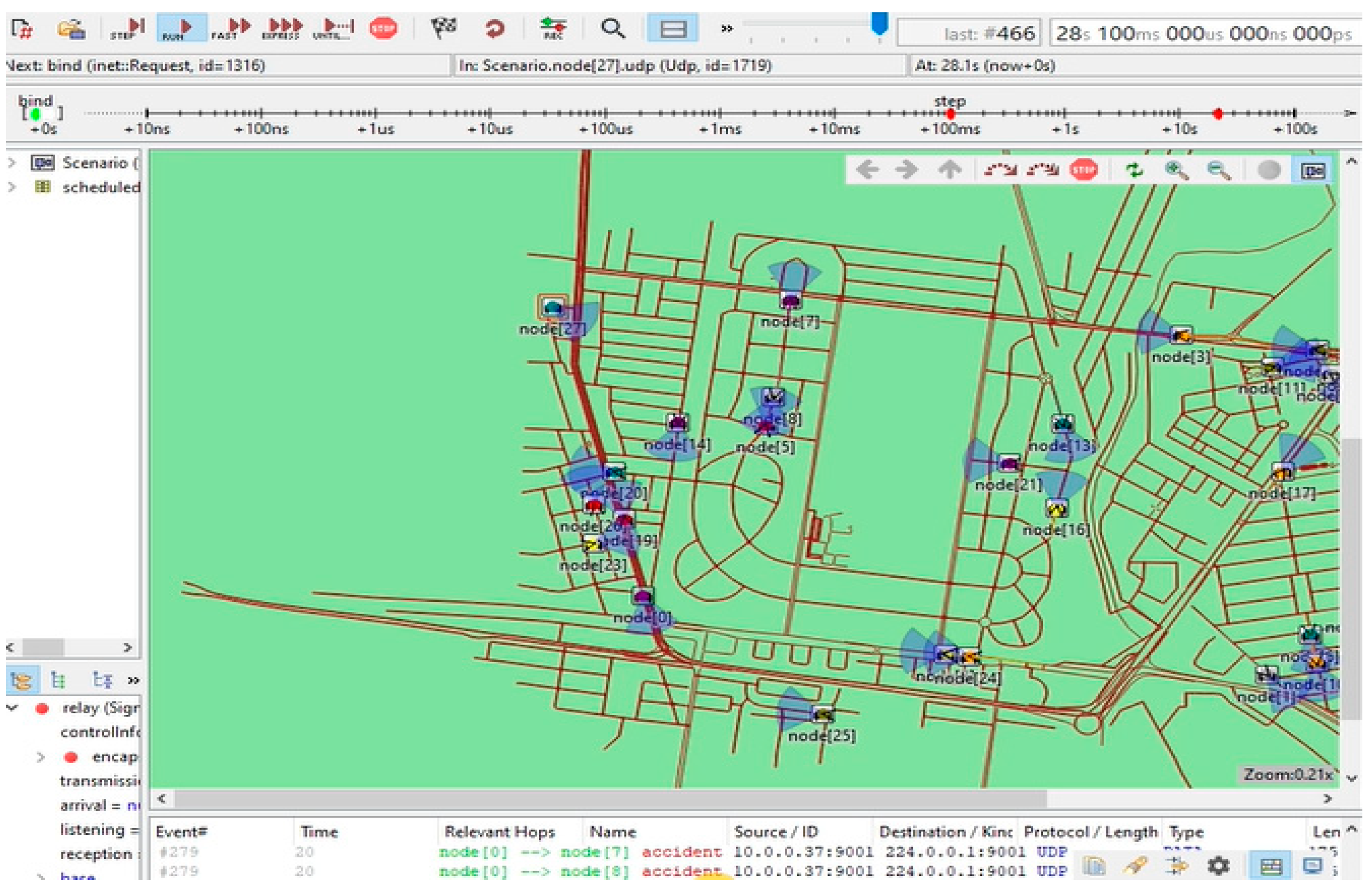
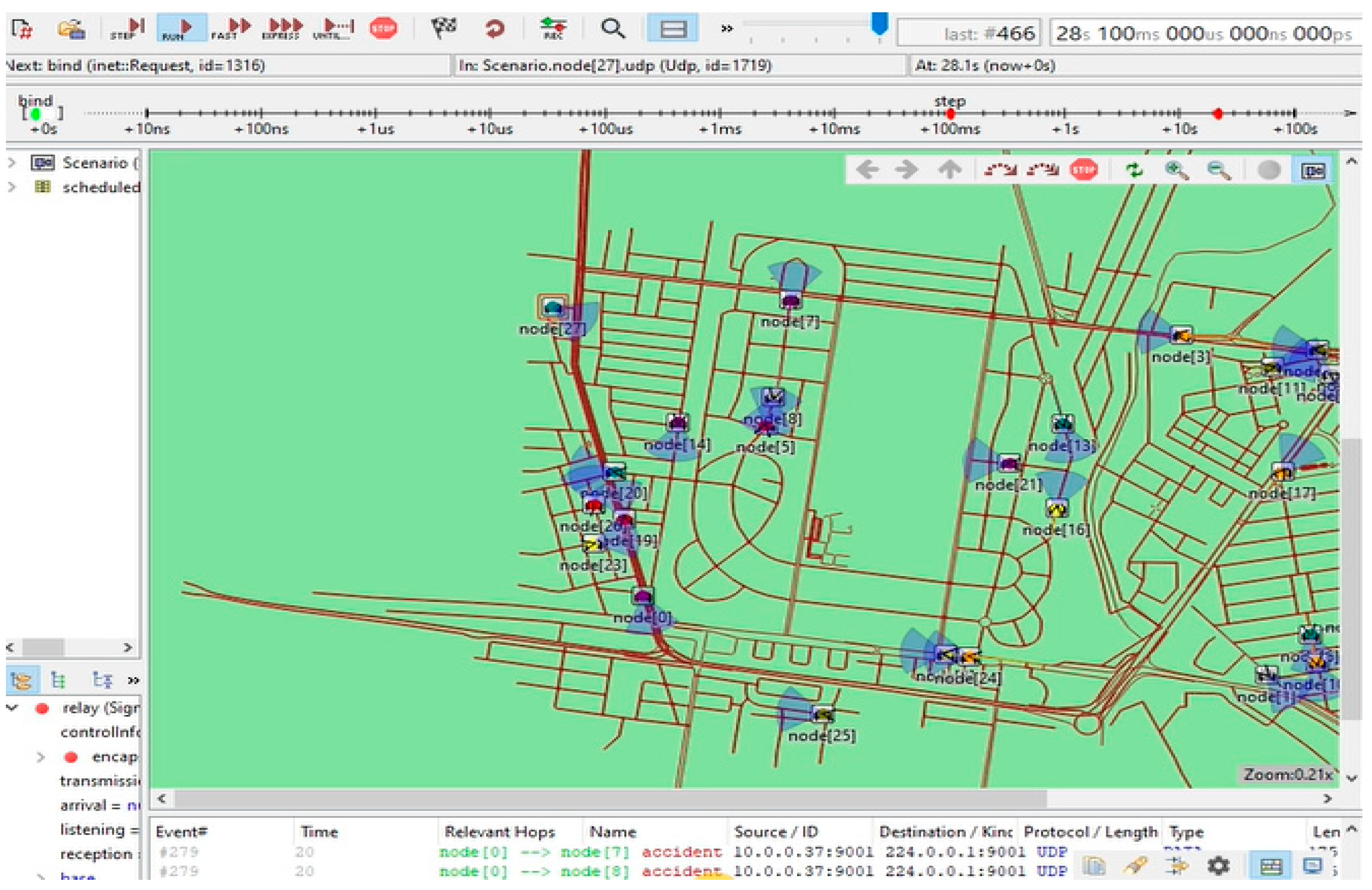
2.3.2. Implementation on V2X
2.4. Benchmarks
2.4.1. QoS
2.4.2. Delay
2.4.3. Throughput
3. Result and Discussion
3.1. Results
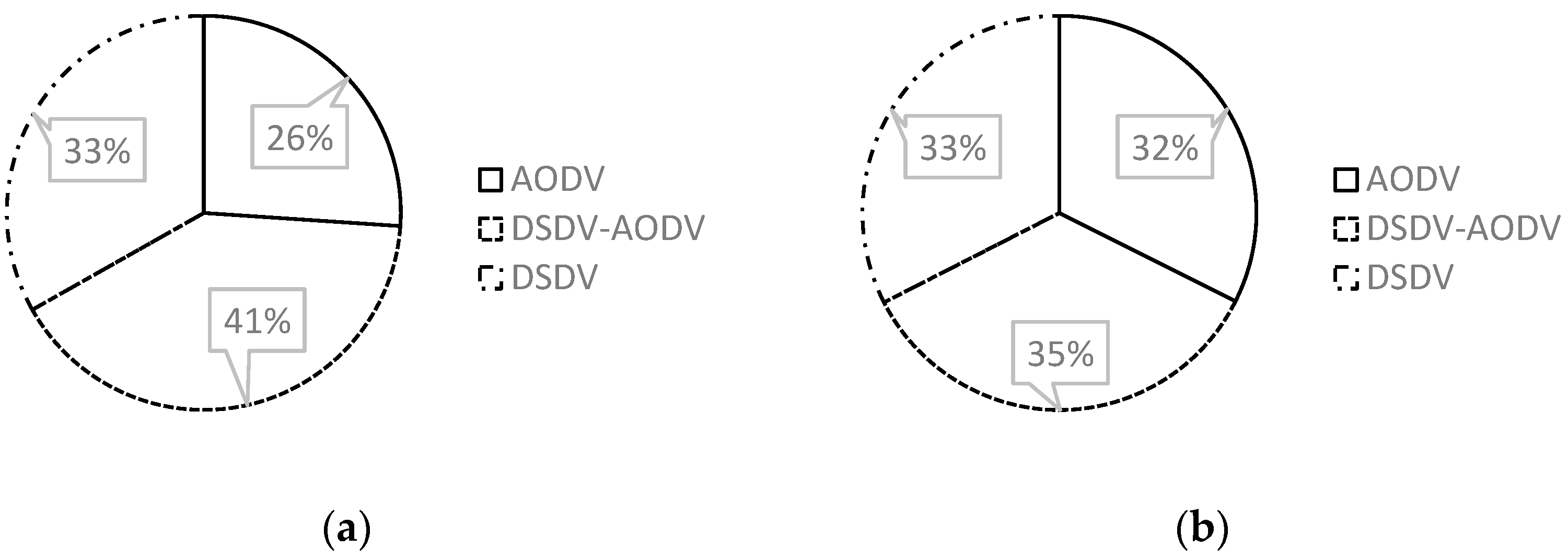
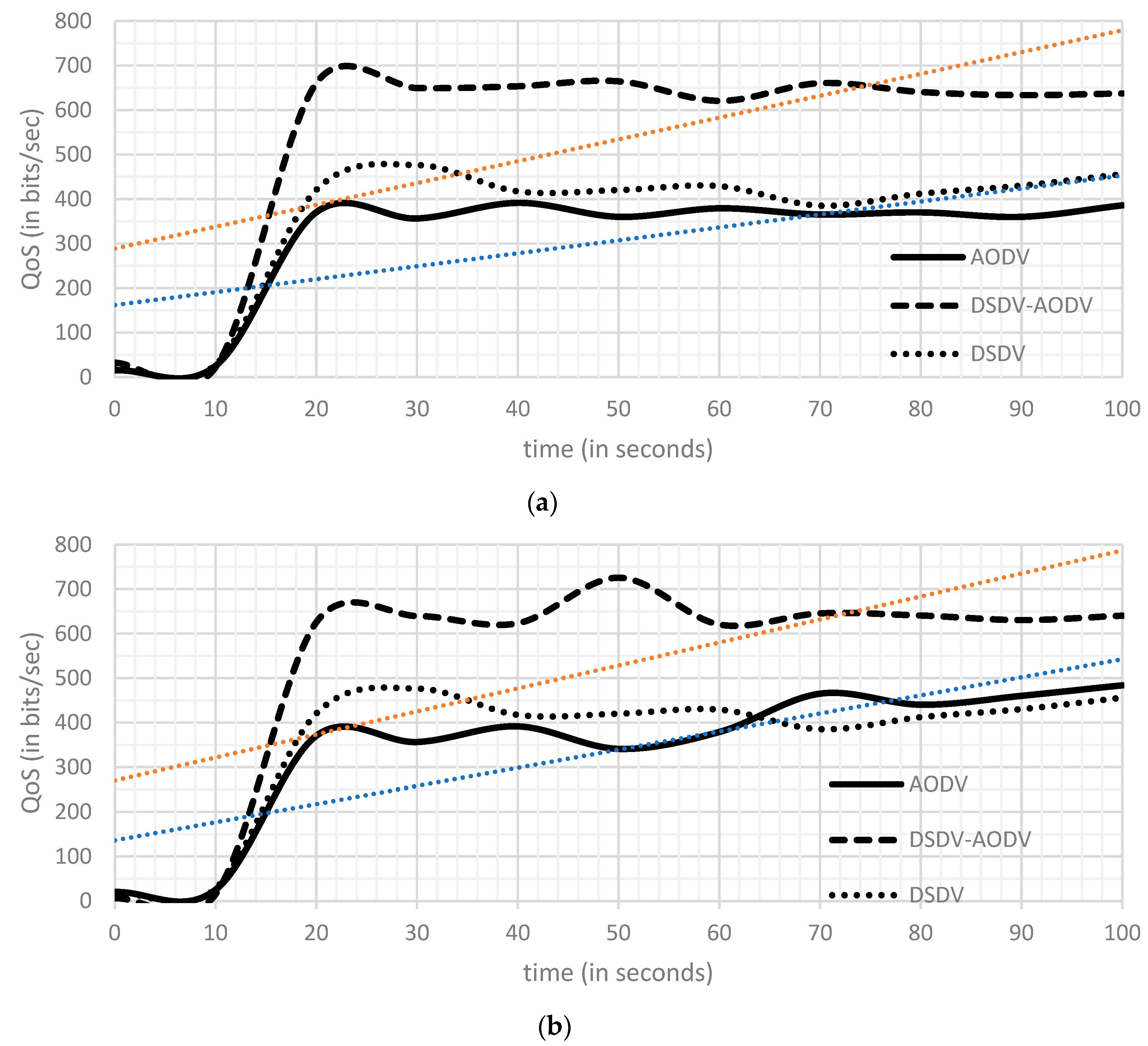
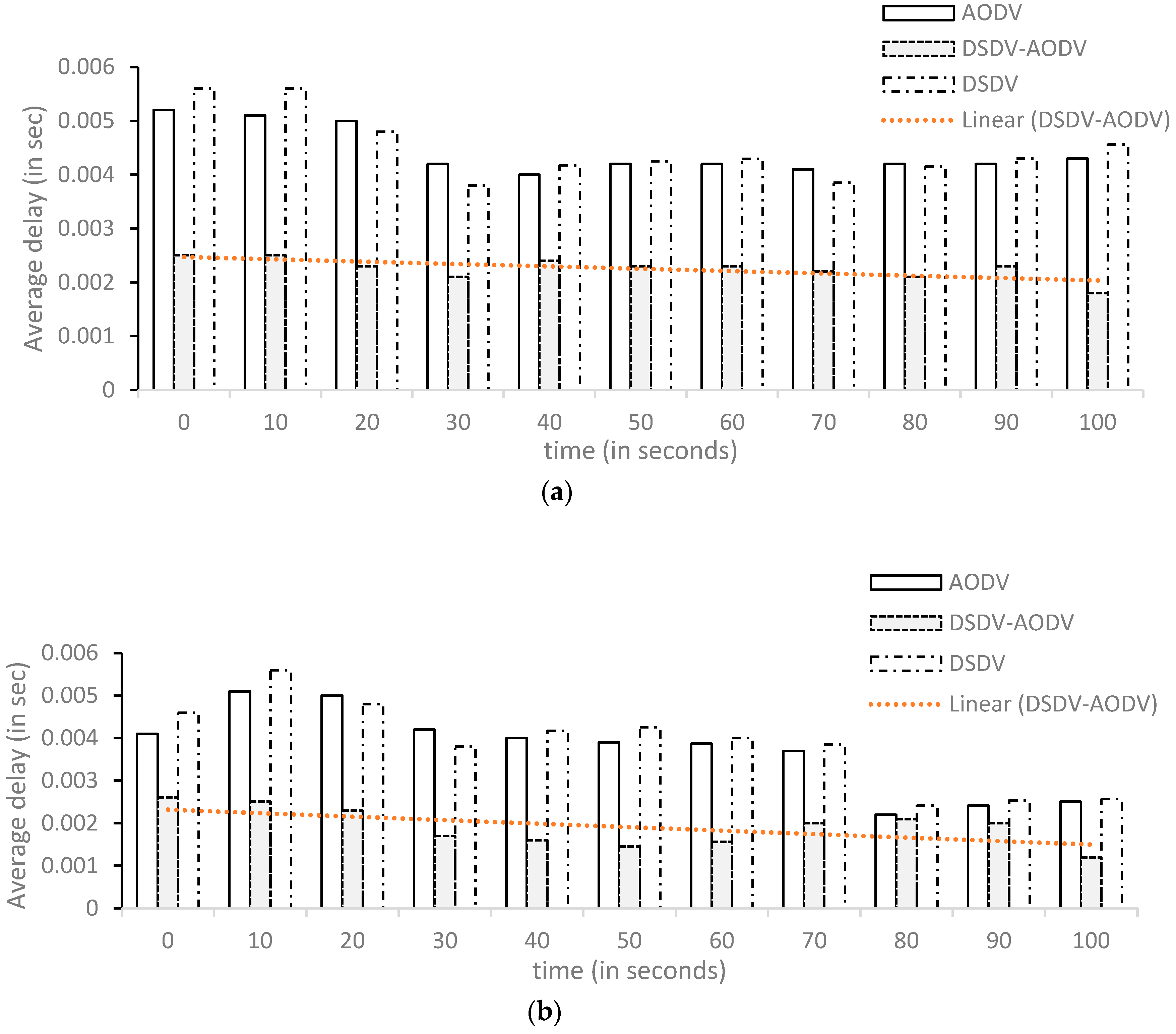
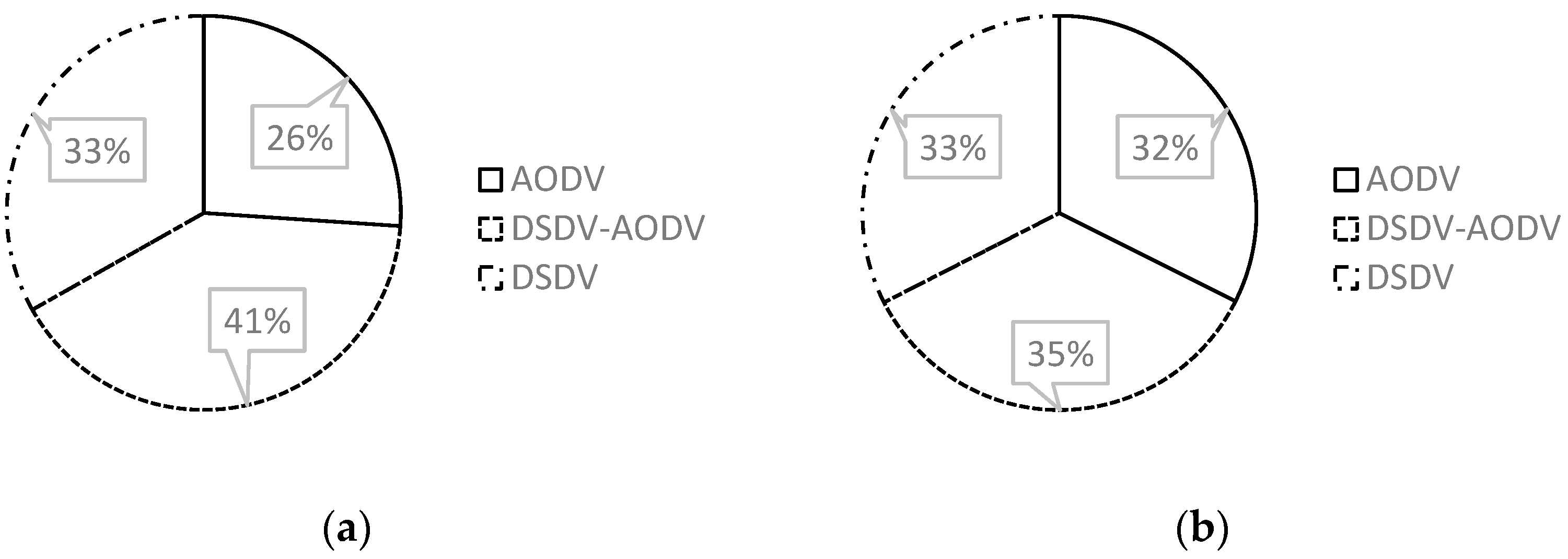
3.1.1. The First Scenario
- The scenario in which the network contains 20 fixed nodes. The DSDV-AODV routing protocol is represented by a segmented line. The AODV routing protocol is represented by a continuous line.
- The scenario that has a structure made up of 20 fixed nodes and 20 movable nodes. The DSDV-AODV routing protocol is represented by a segmented line. The AODV routing protocol is represented by a continuous line.
Comparison of QoS
Comparison of Delay
Comparison of Throughput
3.1.2. The Second Scenario
- The scenario in which the network contains 50 fixed nodes. The DSDV-AODV best results are QoS = 126.1, delay = 0.00168, and throughput = 260.53.
- The scenario that has a structure made up of 50 fixed nodes and 50 mobile nodes. The DSDV-AODV results are QoS = 192.47, delay = 0.00062, and throughput = 130.8).
3.1.3. The Third Scenario
- The scenario in which the network contains 500 fixed nodes. The DSDV-AODV best results are QoS = 69.8, delay = 0.00142, and throughput = 74.1.
- The scenario that has a structure made up of 500 fixed nodes and 500 mobile nodes. The DSDV-AODV best results are QoS = 342.5, delay = 0.00133, and throughput = 372.3.
3.2. Result Comparison and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, W.; Suandi, S.A. TSR-YOLO: A Chinese Traffic Sign Recognition Algorithm for Intelligent Vehicles in Complex Scenes. Sensors 2023, 23, 749. [Google Scholar] [CrossRef] [PubMed]
- Bouktif, S.; Cheniki, A.; Ouni, A. Traffic Signal Control Using Hybrid Action Space Deep Reinforcement Learning. Sensors 2021, 21, 2302. [Google Scholar] [CrossRef] [PubMed]
- Muntean, M.V. Multi-Agent System for Intelligent Urban Traffic Management Using Wireless Sensor Networks Data. Sensors 2021, 22, 208. [Google Scholar] [CrossRef] [PubMed]
- Yuvaraja, M.; Pollachi, C.; Poojashree, S.; Shaliha, G.; Sureka, G. Life Time Enhancement of Wireless Sensor Network for Vanet. EasyChair Preprint no. 2952. Available online: https://easychair.org/publications/preprint/Mwf6 (accessed on 15 February 2023).
- Bhati, A.; Singh, P.K. Analysis of Various Routing Protocol for VANET. In Cybernetics, Cognition and Machine Learning Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 315–325. [Google Scholar]
- Waheed, A.; Shah, M.A.; Mohsin, S.M.; Khan, A.; Maple, C.; Aslam, S.; Shamshirband, S. A comprehensive review of computing paradigms, enabling computation offloading and task execution in vehicular networks. IEEE Access 2022, 10, 3580–3600. [Google Scholar] [CrossRef]
- Chaves, R.; Senna, C.; Luís, M.; Sargento, S.; Matos, R.; Recharte, D. Content distribution in a VANET using InterPlanetary file system. Wirel. Networks 2022, 29, 129–146. [Google Scholar] [CrossRef]
- Shaban, M.; Kurnaz, S.; Shantaf, A.M. Evaluation DSDV, AODV and OLSR routing protocols in real live by using SUMO with NS3 simulation in VANET. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; pp. 1–5. [Google Scholar]
- Shrivastava, P.K.; Vishwamitra, L.K. Comparative analysis of proactive and reactive routing protocols in VANET environment. Meas. Sens. 2021, 16, 100051. [Google Scholar] [CrossRef]
- Yogarayan, S.; Razak, S.F.A.; Azman, A.; Abdullah, M.F.A.; Ibrahim, S.Z.; Raman, K.J. A review of routing protocols for vehicular ad-hoc networks (VANETs). In Proceedings of the 2020 8th International Conference on Information and Communication Technology (ICoICT), Yogyakarta, Indonesia, 24–26 June 2020; pp. 1–7. [Google Scholar]
- Nardini, G.; Sabella, D.; Stea, G.; Thakkar, P.; Virdis, A. Simu5g–an omnet++ library for end-to-end performance evaluation of 5g networks. IEEE Access 2020, 8, 181176–181191. [Google Scholar] [CrossRef]
- Bautista, P.A.B.; Urquiza-Aguiar, L.F.; Cárdenas, L.L.; Igartua, M.A. Large-scale simulations manager tool for OmNet++: Expediting simulations and post-processing analysis. IEEE Access 2020, 8, 159291–159306. [Google Scholar] [CrossRef]
- Albayrak, Z.; Hatem, M.; Çakmak, M. Performance Evaluation of WBANs MAC Protocols in Different dBm and OMNet++. J. Intell. Syst. Theory Appl. 2021, 4, 1–7. [Google Scholar] [CrossRef]
- Medeiros, D.d.F.; de Souza, C.P.; de Carvalho, F.B.S.; Lopes, W.T.A. Energy-Saving Routing Protocols for Smart Cities. Energies 2022, 15, 7382. [Google Scholar] [CrossRef]
- Ducatelle, F.; Di Caro, G.A.; Gambardella, L.M. A new approach for integrating proactive and reactive routing in MANETs. In Proceedings of the 2008 5th IEEE International Conference on Mobile Ad Hoc and Sensor Systems, Atlanta, GA, USA, 29 September–2 October 2008; pp. 377–383. [Google Scholar]
- Yadav, S.; Rishi, R.; Singh, Y.; Hussein, Z.K.; Ibrahim, A.A.; Ettyem, S.A. Traffic Management in Ad-Hoc Network by Selection of Suitable Routing Protocol. J. Physics Conf. Ser. 2022, 2322, 012096. [Google Scholar] [CrossRef]
- Priya, R.; Rao, R.N.; Murthy, K.R.N. Analysis of routing protocol performance for V2X communication. In Emerging Trends in Photonics, Signal Processing and Communication Engineering; Springer: Berlin/Heidelberg, Germany, 2020; pp. 179–185. [Google Scholar]
- Belamri, F.; Boulfekhar, S.; Aissani, D. A survey on QoS routing protocols in Vehicular Ad Hoc Network (VANET). Telecommun. Syst. 2021, 78, 117–153. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K. QMM-VANET: An efficient clustering algorithm based on QoS and monitoring of malicious vehicles in vehicular ad hoc networks. J. Syst. Softw. 2020, 165, 110561. [Google Scholar] [CrossRef]
- Zhao, H.; Yue, H.; Gu, T.; Li, C.; Zhou, D. Low delay and seamless connectivity-based message propagation mechanism for VANET of VCPS. Wirel. Pers. Commun. 2021, 118, 3385–3402. [Google Scholar] [CrossRef]
- Guo, C.; Li, D.; Chen, X.; Zhang, G. An adaptive V2R communication strategy based on data delivery delay estimation in VANETs. Veh. Commun. 2022, 34, 100444. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, H.; Fang, Y.; Yuan, D. An adaptive high-throughput multichannel MAC protocol for VANETs. IEEE Internet Things J. 2020, 7, 8249–8262. [Google Scholar] [CrossRef]
- Tripti, C.; Jibukumar, M.G. An Enhanced Synchronized Multi-Channel MAC Scheme to improve Throughput in VANET. Int. J. Commun. Netw. Inf. Secur. 2020, 12, 153–161. [Google Scholar]
- Ali, M.; Ngadi, M.A.; Sham, R.; Al, I.I. Enhanced QoS Routing Protocol for an Unmanned Ground Vehicle, Based on the ACO Approach. Sensors 2023, 23, 1431. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Description |
|---|---|
| VANET | Vehicular Ad Hoc Network |
| DSDV | Destination Sequenced Distance Vector |
| AODV | Ad Hoc On-demand Distance Vector |
| QoS | Quality of Service |
| DSR | Dynamic Source Routing |
| DVR | Distance Vector Routing |
| UGV | Unmanned Ground Vehicle |
| V2X | Vehicle To Everything |
| WSN | Wireless Sensor Network |
| DES | Discrete Event Simulator |
| UDP | User Datagram Protocol |
| RSU | Road-Side Unit |
| RREQ | Route Request Message |
| RRER | Route Error Message |
| MPR | Multipoint Relay |
| Parameter | Value |
|---|---|
| Environment size | 1000 × 1000 m2 |
| Number of UAVs | 200 |
| UAV location | 35, 75 |
| Simulation time | 3400 s |
| Transmission range | 2450 m |
| Packet size | 50 bytes |
| Energy for dissipation | 100 pJ/bit |
| Wireless standardization | IEEE802.11P |
| (a) 20 Fixed Nodes | (b) 20 Fixed Nodes + 20 Mobile Nodes | ||||
|---|---|---|---|---|---|
| AODV | DSDV | DSDV-AODV | AODV | DSDV | DSDV-AODV |
| 15.638 | 18.14 | 32.6 | 20.8 | 18.6 | 6.1 |
| 365.35 | 385.36 | 660.72 | 341.35 | 420.35 | 725 |
| 386.2 | 455.3 | 637.5 | 484.35 | 456.3 | 640 |
| (a) 20 Fixed Nodes | (b) 20 Fixed Nodes + 20 Mobile Nodes | ||||
|---|---|---|---|---|---|
| AODV | DSDV | DSDV-AODV | AODV | DSDV | DSDV-AODV |
| 0.0052 | 0.0056 | 0.0025 | 0.0041 | 0.0046 | 0.0026 |
| 0.0042 | 0.0038 | 0.0023 | 0.0039 | 0.0042 | 0.0014 |
| 0.0043 | 0.0046 | 0.0018 | 0.0025 | 0.0026 | 0.0012 |
| (a) 20 Fixed Nodes | (b) 20 Fixed Nodes + 20 Mobile Nodes | ||||
|---|---|---|---|---|---|
| AODV | DSDV | DSDV-AODV | AODV | DSDV | DSDV-AODV |
| 44.19 | 45.19 | 32.208 | 95.8 | 44.19 | 62 |
| 412.96 | 417.96 | 741.162 | 665.2 | 472.96 | 719.9 |
| 402.63 | 432.3 | 629.437 | 578.7 | 582.63 | 627.49 |
| (a) 50 Fixed Nodes | (b) 50 Fixed Nodes + 50 Mobile Nodes | ||||
|---|---|---|---|---|---|
| AODV | DSDV | DSDV-AODV | AODV | DSDV | DSDV-AODV |
| QoS parameter (kbps) | |||||
| 5.2 | 6.2 | 3.67 | 16.49 | 17.2 | 9.42 |
| 103.7 | 107.1 | 118.9 | 147.1 | 152.1 | 180.5 |
| 107.8 | 112.6 | 126.1 | 144.29 | 153.9 | 192.47 |
| Delay parameter (second) | |||||
| 0.00173 | 0.00180 | 0.00169 | 0.00267 | 0.0025 | 0.00026 |
| 0.00194 | 0.00198 | 0.00190 | 0.00140 | 0.00141 | 0.00078 |
| 0.00183 | 0.00178 | 0.00168 | 0.00167 | 0.00157 | 0.00062 |
| Throughput parameter (kbps) | |||||
| 18.68 | 20.81 | 49.4 | 5.3 | 8.3 | 12.7 |
| 158.9 | 161.7 | 282.6 | 135.3 | 138.1 | 139.6 |
| 156.5 | 168.3 | 260.53 | 111.39 | 117.39 | 130.8 |
| (a) 500 Fixed Nodes | (b) 500 Fixed Nodes + 500 Mobile Nodes | ||||
|---|---|---|---|---|---|
| AODV | DSDV | DSDV-AODV | AODV | DSDV | DSDV-AODV |
| QoS parameter (kbps) | |||||
| 5.16 | 6.20 | 1.456 | 6.97 | 9.2 | 23.2 |
| 70.8 | 78.1 | 84.2 | 363.97 | 352.4 | 385.6 |
| 63.5 | 62.6 | 69.8 | 328.5 | 331.9 | 342.5 |
| Delay parameter (second) | |||||
| 0.00216 | 0.00218 | 0.000267 | 0.00495 | 0.00425 | 0.00028 |
| 0.00171 | 0.00169 | 0.00166 | 0.00169 | 0.00164 | 0.00143 |
| 0.00148 | 0.00147 | 0.00142 | 0.00192 | 0.00195 | 0.00133 |
| Throughput parameter (kbps) | |||||
| 5.1 | 5.31 | 5.8 | 25.1 | 8.3 | 40.54 |
| 73.9 | 80.7 | 88.2 | 406.2 | 410.1 | 412.2 |
| 67.2 | 68.3 | 74.1 | 367.2 | 365.39 | 372.3 |
| Parameter | (AODV, DSDV) | DSDV-AODV | ||
|---|---|---|---|---|
| 20 fixed nodes | 20 fixed nodes + 20 mobile nodes | 20 fixed nodes | 20 fixed nodes +20 mobile nodes | |
| QoS (kbps) | (386.2, 455.3) | (484.3, 456.3) | 637.5 | 640 |
| Delay (second) | (0.0043, 0.0046) | (0.0025, 0.0026) | 0.0018 | 0.0012 |
| Throughput (kbps) | (402.63, 432.3) | (578.7, 582.63) | 629.437 | 627.49 |
| 50 fixed nodes | 50 fixed nodes +50 mobile nodes | 50 fixed nodes | 50 fixed nodes + 50 mobile nodes | |
| QoS (kbps) | (107.8, 112.6) | (144.29, 153.9) | 126.1 | 192.47 |
| Delay (second) | (0.00183, 0.00178) | (0.00167, 0.00157) | 0.00168 | 0.00062 |
| Throughput(kbps) | (156.5, 168.3) | (111.39, 117.39) | 260.53 | 130.8 |
| 500 fixed nodes | 500 fixed nodes +500 mobile nodes | 500 fixed nodes | 500 fixed nodes + 500 mobile nodes | |
| QoS (kbps) | (63.5, 64.6) | (328.5, 331.9) | 69.8 | 342.5 |
| Delay (second) | (0.00148, 0.00147) | (0.00192, 0.00195) | 0.00142 | 0.00133 |
| Throughput (kbps) | (67.2, 68.3) | (367.2, 365.39) | 74.1 | 372.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, A.M.; Ngadi, M.A.; Al_Barazanchi, I.I.; JosephNg, P.S. Intelligent Traffic Model for Unmanned Ground Vehicles Based on DSDV-AODV Protocol. Sensors 2023, 23, 6426. https://doi.org/10.3390/s23146426
Ali AM, Ngadi MA, Al_Barazanchi II, JosephNg PS. Intelligent Traffic Model for Unmanned Ground Vehicles Based on DSDV-AODV Protocol. Sensors. 2023; 23(14):6426. https://doi.org/10.3390/s23146426
Chicago/Turabian StyleAli, Ali M., Md Asri Ngadi, Israa Ibraheem Al_Barazanchi, and Poh Soon JosephNg. 2023. "Intelligent Traffic Model for Unmanned Ground Vehicles Based on DSDV-AODV Protocol" Sensors 23, no. 14: 6426. https://doi.org/10.3390/s23146426
APA StyleAli, A. M., Ngadi, M. A., Al_Barazanchi, I. I., & JosephNg, P. S. (2023). Intelligent Traffic Model for Unmanned Ground Vehicles Based on DSDV-AODV Protocol. Sensors, 23(14), 6426. https://doi.org/10.3390/s23146426