

A Double-Layer Vehicle Speed Prediction Based on BPNN-LSTM for Off-Road Vehicles
Abstract
1. Introduction
2. Related Works
3. Methodology
3.1. Problem Description
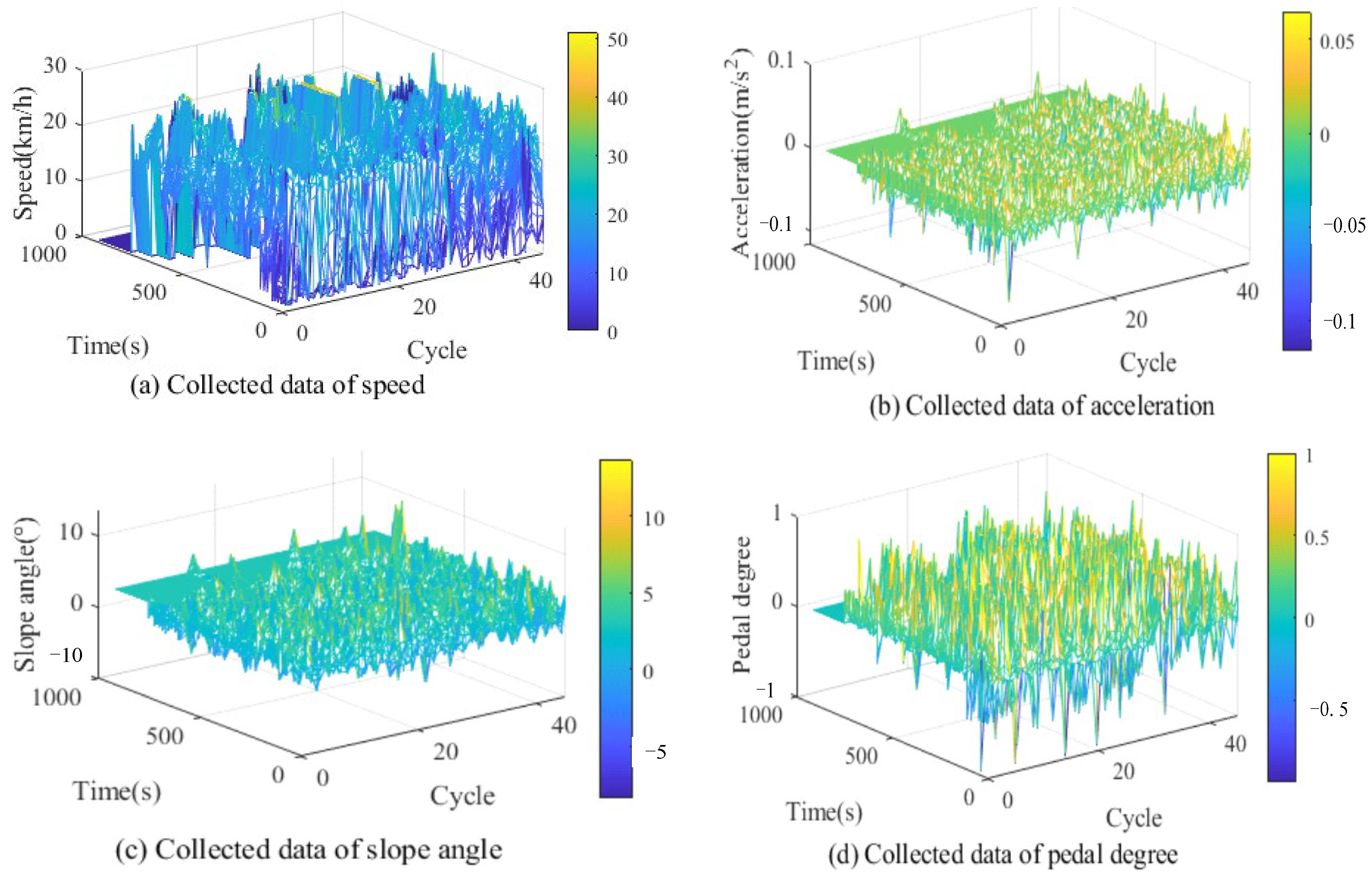
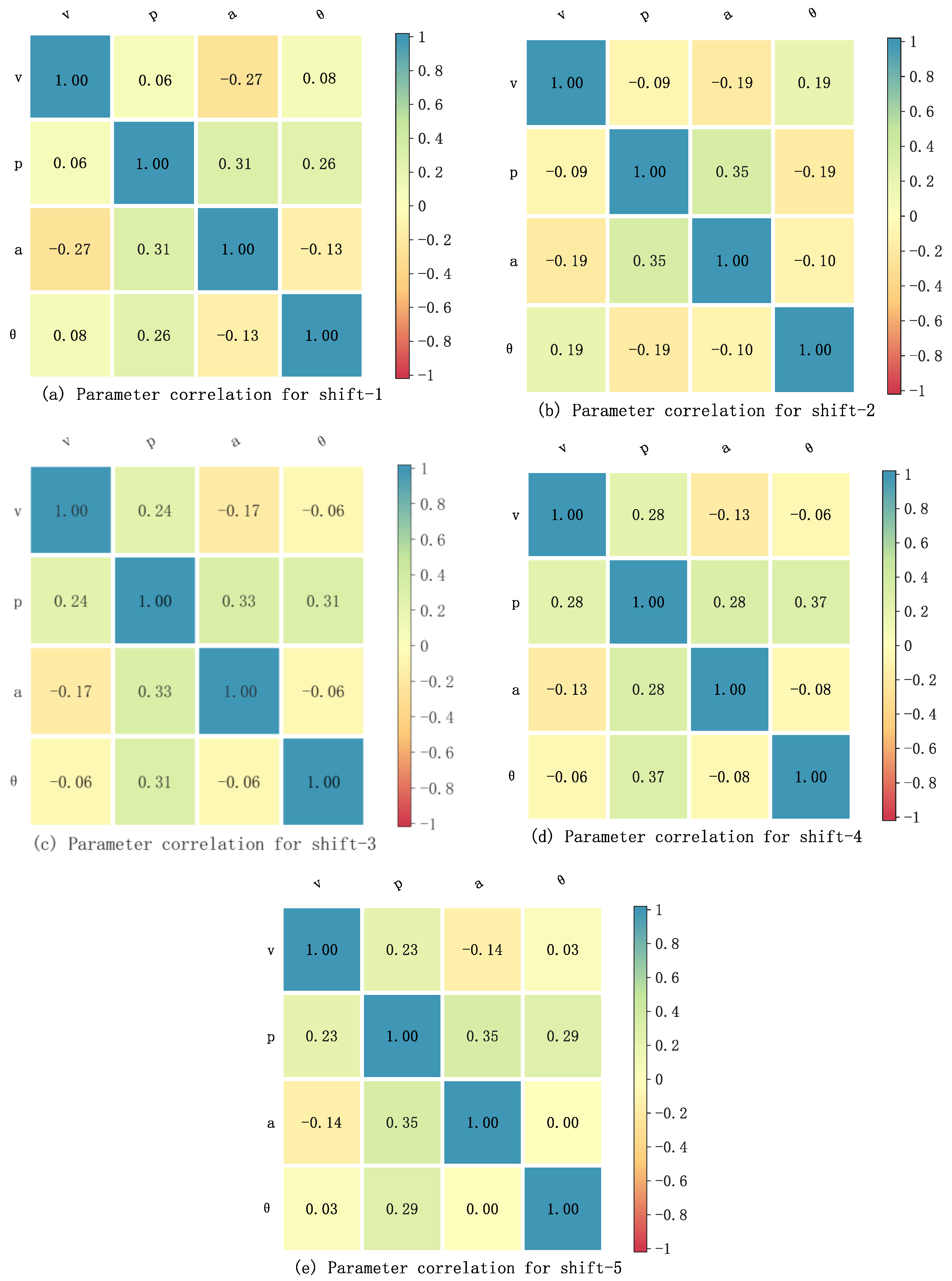
3.2. Working Condition Data Collection and Analysis
4. Vehicle Speed Prediction Based on BPNN-LSTM
4.1. BPNN Prediction Models of and
- (1)
- The short-term historical speed influences current speed and future speed, i.e., information inheritance;
- (2)
- The impact of long-term historical speed on current speed will be reduced, i.e., information forgetting.
4.2. LSTM Vehicle Speed Prediction Network
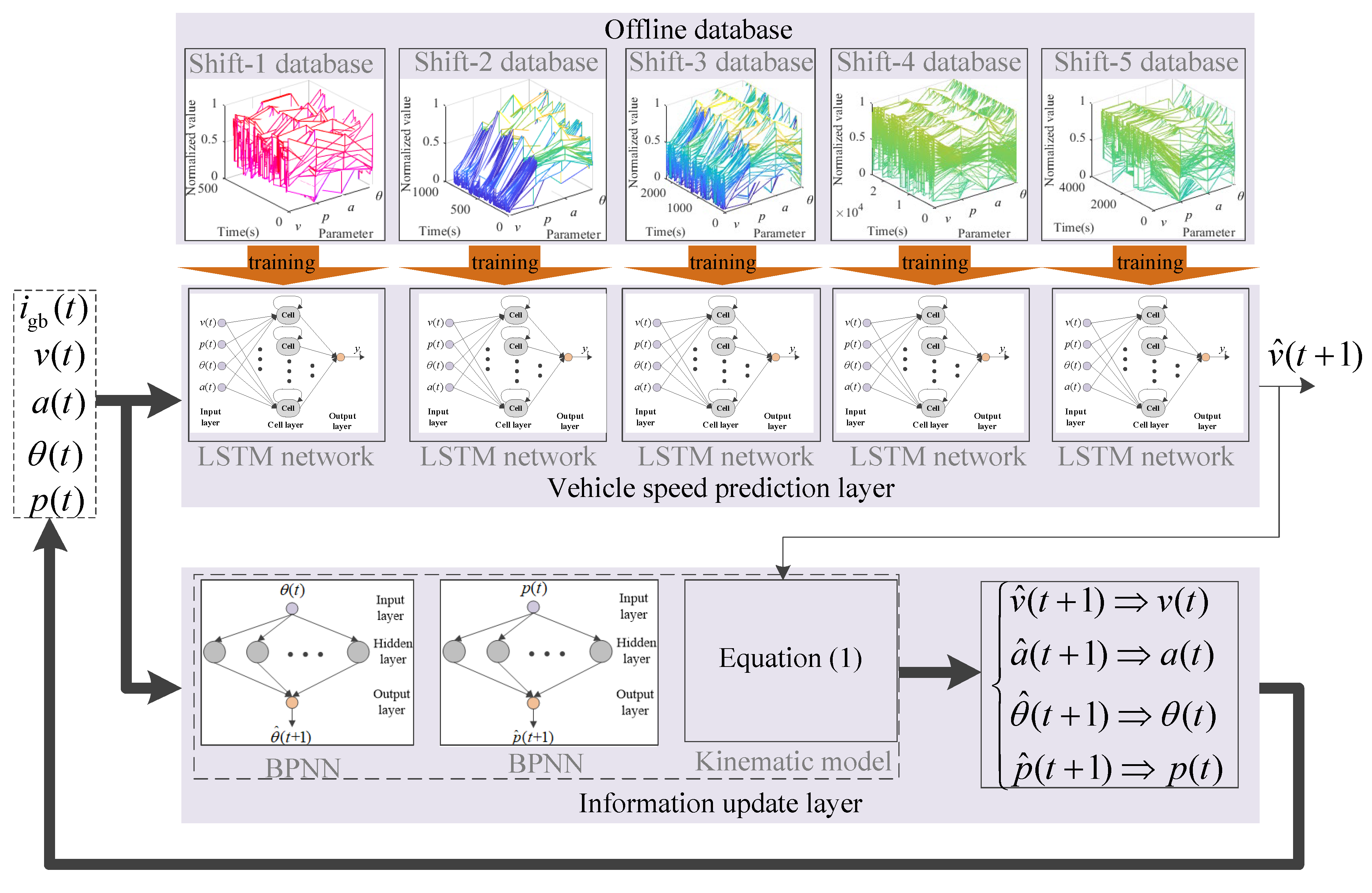
4.3. Double-Layer VSP Model Based on BPNN-LSTM
5. Results and Discussion
5.1. Experimental Conditions Setting
5.1.1. Experimental Scenario
5.1.2. Performance Evaluation Methods
5.1.3. Simulation Platform
5.2. Vehicle Speed Prediction Analysis
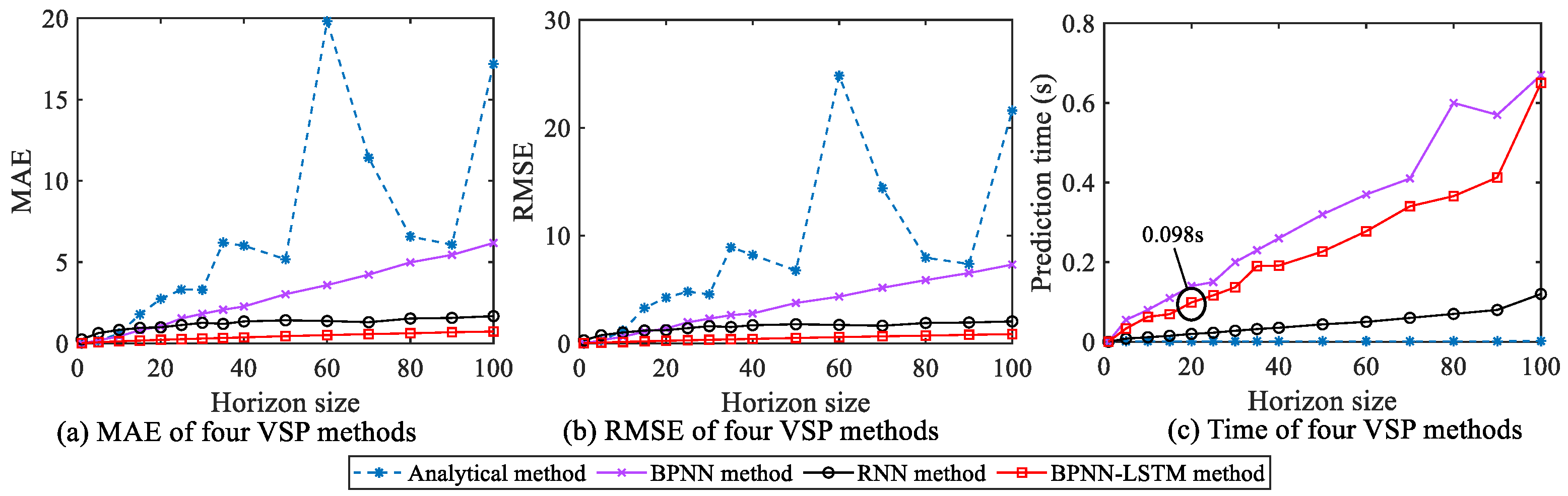
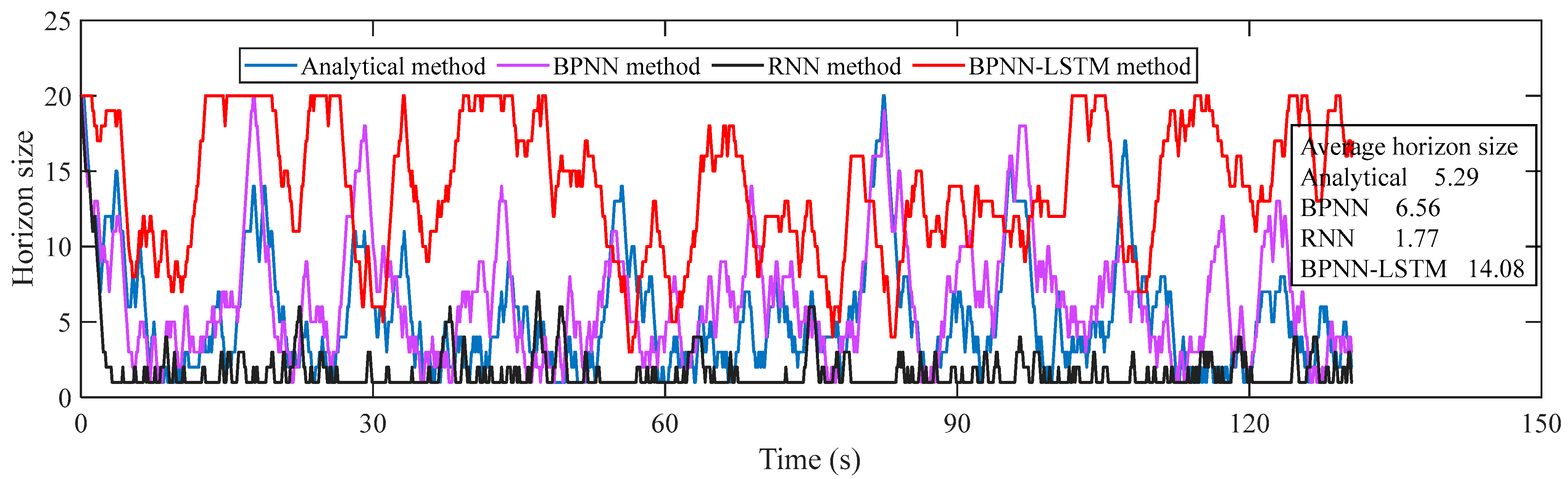
5.2.1. Horizon Size j Selection
5.2.2. VSP in Mining Truck Operation Scenario
5.2.3. VSP in Loader Operation Scenario
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VSP | vehicle speed prediction | |
| LSTM | long short-term memory | |
| BPNN | backpropagation neural network | |
| RNN | recurrent neural network | |
| ITS | intelligent transportation system | |
| NN | neural network | |
| MPTM | Markov probability transfer matrix | |
| CNN | convolutional neural network | |
| GRU | gated recurrent unit | |
| HIL | hardware in loop | |
| IOT | Internet of Things | |
| AEKF | adaptive extended Kalman filter | |
| EKF | extended Kalman filter | |
| MSE | mean square error | |
| MAE | mean absolute error | |
| RMSE | root-mean-square error | |
| Oriented-HSMM | Oriented Hidden Semi-Markov Model | |
| SWTS | sliding window time series | |
| E-LLM | evolutionary least learning machine | |
| HMM | Hidden Markov model | |
| DNN | deep NN | |
| NIGA-SVM | niche immune genetic algorithm-support vector machine | |
| GA-SVM | genetic algorithm-support vector machine | |
| TCNs | temporal convolutional networks | |
| GCN | graph convolution network | |
| GA | genetic algorithm | |
| APSO-LSSVM | adaptive particle swarm optimization–least squares support vector machine | |
| MAPE | mean absolute percentage error | |
| MLPs-NN | multi-layer perception NN | |
| VCU | vehicle control unit | |
| Variables and its unit | ||
| Variables | Name | Unit |
| driving distance | m | |
| vehicle speed | m/s | |
| acceleration | m/s2 | |
| the moment | s | |
| wheel radius | m | |
| vehicle mass | kg | |
| air drag coefficient | – | |
| air density | kg/m3 | |
| frontal area | m2 | |
| gravitational acceleration | m/s2 | |
| rolling resistance coefficient | – | |
| slope angle | ° | |
| required torque of wheels | Nm | |
| output torque of power source | Nm | |
| gear ratio of gearbox | – | |
| driveline reduction ratio | – | |
| system mechanical transmission efficiency | – | |
| pedal degree | – | |
| prediction horizon size | – | |
| maximum gear of gearbox | – | |
References
- Hu, Z.; Sun, R.; Shao, F.; Sui, Y. An Efficient Short-Term Traffic Speed Prediction Model Based on Improved TCN and GCN. Sensors 2021, 21, 6735. [Google Scholar] [CrossRef] [PubMed]
- Daniel, A.; Subburathinam, K.; Paul, A.; Rajkumar, N.; Rho, S. Big autonomous vehicular data classifications: Towards procuring intelligence in ITS. Veh. Commun. 2017, 9, 306–312. [Google Scholar] [CrossRef]
- Li, Q.; Cheng, R.; Ge, H. Short-term vehicle speed prediction based on BiLSTM-GRU model considering driver heterogeneity. Phys. A Stat. Mech. Its Appl. 2023, 610, 128410. [Google Scholar] [CrossRef]
- Lefevre, S.; Sun, C.; Bajcsy, R.; Laugier, C. Comparision of parametric and non-parametric approaches for vehicle speed prediction. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3494–3499. [Google Scholar]
- Gong, Q.; Li, Y.; Peng, Z. Trip-based optimal power management of plug-in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2008, 57, 3393–3401. [Google Scholar] [CrossRef]
- Gong, Q.; Li, Y.; Peng, Z. Trip based optimal power management of plug-in hybrid electric vehicle with advanced traffic modeling. SAE Int. J. Engines 2009, 1, 861–872. [Google Scholar] [CrossRef]
- Jaewook, S.; Kyuhwan, Y.; Sunbin, K.; Myoungho, S.; Manbae, H. Comparative Study of Markov Chain with Recurrent Neural Network for Short Term Velocity Prediction Implemented on an Embedded System. IEEE Access 2021, 9, 24755–24767. [Google Scholar] [CrossRef]
- Hua, C.; Fan, W. Freeway Traffic Speed Prediction under the Intelligent Driving Environment: A Deep Learning Approach. J. Adv. Transp. 2022, 2022, 6888115. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Du, S.; Ma, H.; Zhao, W.; Li, H. Energy Management Strategies for Hybrid Construction Machinery: Evolution, Classification, Comparison and Future Trends. Energies 2019, 12, 2024. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Xu, K.; Tang, X.; Cui, Y. Current Status and Prospects for Model Predictive Energy Management in Hybrid Electric Vehicle. J. Mech. Eng. 2019, 55, 86–108. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Y.; Li, W.; Shang, F.; Zhan, J. Hybrid-Trip-model-based energy management of a PHEV with computation-optimized dynamic programming. IEEE Trans. Veh. Technol. 2018, 67, 338–353. [Google Scholar] [CrossRef]
- Suh, B.; Shao, Y.; Sun, Z. Vehicle Speed Prediction for Connected and Autonomous Vehicles Using Communication and Perception. In Proceedings of the American Control Conference, Denver, CO, USA, 1–3 July 2020; pp. 448–453. [Google Scholar] [CrossRef]
- Li, L.; Coskun, S.; Wang, J.; Fan, Y.; Zhang, F.; Langari, R. Velocity Prediction Based on Vehicle Lateral Risk Assessment and Traffic Flow: A Brief Review and Application Examples. Energies 2021, 14, 3431. [Google Scholar] [CrossRef]
- Morlock, F.; Rolle, B.; Bauer, M.; Sawodny, O. Forecasts of Electric Vehicle Energy Consumption Based on Characteristic Speed Profiles and Real-Time Traffic Data. IEEE Trans. Veh. Technol. 2020, 69, 1404–1418. [Google Scholar] [CrossRef]
- Gipps, P.G. A behavioural car-following model for computer simulation. Transp. Res. Part B Methodol. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, S.; Li, Z.; Zhou, B.; Zhao, D. An Improved Car-Following Speed Model considering Speed of the Lead Vehicle, Vehicle Spacing, and Driver’s Sensitivity to Them. J. Adv. Transp. 2020, 2020, 2797420. [Google Scholar] [CrossRef]
- Jisu, K.; Daejin, P. Efficient Sensor Processing Technique Using Kalman Filter-Based Velocity Prediction in Large-Scale Vehicle IoT Application. IEEE Access 2022, 10, 116735–116746. [Google Scholar] [CrossRef]
- Huang, Y.; Qian, L.; Feng, A.; Wu, Y.; Zhu, W. RFID Data-Driven Vehicle Speed Prediction via Adaptive Extended Kalman Filter. Sensors 2018, 18, 2787. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.; Liu, T.; Li, H.; Xin, Z. A Study on Predictive Energy Management Strategy for a Plug-in Hybrid Electric Bus Based on Markov Chain. Automot. Eng. 2018, 40, 871–877+911. [Google Scholar] [CrossRef]
- Ding, F.; Wang, W.; Xiang, C.; He, W.; Qi, Y. Speed Prediction Method and Energy Management Strategy for a Hybrid Electric Vehicle Based on Driving Condition Classification. Automot. Eng. 2017, 39, 1223–1231. [Google Scholar] [CrossRef]
- Jaewook, S.; Myoungho, S. Vehicle Speed Prediction Using a Markov Chain with Speed Constraints. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3201–3211. [Google Scholar] [CrossRef]
- Yang, S.; Wang, W.; Xi, J. Leveraging Human Driving Preferences to Predict Vehicle Speed. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11137–11147. [Google Scholar] [CrossRef]
- Ladan, M.; Ahmad, M.; Nasser, L.A. Vehicle speed prediction via a sliding-window time series analysis and an evolutionary least learning machine: A case study on San Francisco urban roads. Eng. Sci. Technol. Int. J. 2015, 18, 150–162. [Google Scholar] [CrossRef]
- Jiang, B.; Fei, Y. Vehicle Speed Prediction by Two-Level Data Driven Models in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1793–1801. [Google Scholar] [CrossRef]
- Yan, M.; Li, M.; He, H.; Peng, J. Deep learning for vehicle speed prediction. Applied Energy Symposium and Forum, Carbon Capture, Utilization and Storage. Energy Procedia 2018, 152, 618–623. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Lu, X.; Zhao, W. Research on optimized GA-SVM vehicle speed prediction model based on driver-vehicle-road-traffic system. Sci. China Inf. Sci. 2018, 61, 782–790. [Google Scholar] [CrossRef]
- Xing, J.; Chu, L.; Guo, C.; Pu, S.; Hou, Z. Dual-Input and Multi-Channel Convolutional Neural Network Model for Vehicle Speed Prediction. Sensors 2021, 21, 7767. [Google Scholar] [CrossRef]
- Katariya, V.; Baharani, M.; Morris, N.; Omidreza, S.; Hamed, T. DeepTrack: Lightweight Deep Learning for Vehicle Trajectory Prediction in Highways. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18927–18936. [Google Scholar] [CrossRef]
- Li, Y.; Ren, C.; Zhao, H.; Chen, G. Investigating long-term vehicle speed prediction based on GA-BP algorithms and the road-traffic environment. Sci. China Inf. Sci. 2020, 63, 190205. [Google Scholar] [CrossRef]
- Guo, X.; Yan, X.; Chen, Z.; Meng, Z. A Novel Closed-Loop System for Vehicle Speed Prediction Based on APSO LSSVM and BPNN. Energies 2022, 15, 21. [Google Scholar] [CrossRef]
- Wang, L.; Cui, Y.; Zhang, F.; Coskun, S.; Liu, K.; Li, G. Stochastic speed prediction for connected vehicles using improved bayesian networks with back propagation. Sci. China Tech. Sci. 2022, 65, 1524–1536. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, W.; Qi, B. Combined Prediction for Vehicle Speed with Fixed Route. Chin. J. Mech. Eng. 2020, 33, 60. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Z.; Zhang, C.; Lv, C.; Deng, C.; Hao, D.; Chen, J.; Ran, H. Improved Short-Term Speed Prediction Using Spatiotemporal-Vision-Based Deep Neural Network for Intelligent Fuel Cell Vehicles. IEEE Trans. Ind. Inform. 2021, 17, 6004–6013. [Google Scholar] [CrossRef]
- Zafar, N.; Haq, I.U.; Chughtai, J.U.R.; Shafiq, O. Applying Hybrid Lstm-Gru Model Based on Heterogeneous Data Sources for Traffic Speed Prediction in Urban Areas. Sensors 2022, 22, 3348. [Google Scholar] [CrossRef] [PubMed]
- Xu, E.; Wei, F.; Lin, C.; Meng, Y.; Zhu, J.; Liu, X. Model predictive control-based energy management strategy with vehicle speed prediction for hybrid electric vehicles. AIP Adv. 2022, 12, 075019. [Google Scholar] [CrossRef]
- Li, D. Evaluation of statistical dependency for reliability analysis of single pile. Rock Soil Mech. 2008, 29, 633–638. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Y.; Zhan, J.; Shang, F. An on-line energy management strategy based on trip condition prediction for commuter plug-in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 3767–3781. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle | Prediction Methods | |||
|---|---|---|---|---|
| Mining truck operation scenario | Analytical method | 1.1600 | 1.3060 | 0.9801 |
| BPNN | 0.6974 | 1.1945 | 0.9712 | |
| RNN | 0.6392 | 1.0629 | 0.9725 | |
| BPNN-LSTM | 0.4196 | 0.4600 | 0.9998 |
| Cycle | Prediction Methods | |||
|---|---|---|---|---|
| Loader operation scenario | Analytical method | 0.6748 | 1.1362 | 0.9308 |
| BPNN | 0.6684 | 0.9550 | 0.9463 | |
| RNN | 0.6144 | 0.8165 | 0.9652 | |
| BPNN-LSTM | 0.4558 | 0.5665 | 0.9857 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liang, Y.; Chen, Z.; Li, H.; Zhang, W.; Sun, J. A Double-Layer Vehicle Speed Prediction Based on BPNN-LSTM for Off-Road Vehicles. Sensors 2023, 23, 6385. https://doi.org/10.3390/s23146385
Liu J, Liang Y, Chen Z, Li H, Zhang W, Sun J. A Double-Layer Vehicle Speed Prediction Based on BPNN-LSTM for Off-Road Vehicles. Sensors. 2023; 23(14):6385. https://doi.org/10.3390/s23146385
Chicago/Turabian StyleLiu, Jichao, Yanyan Liang, Zheng Chen, Huaiyi Li, Weikang Zhang, and Junling Sun. 2023. "A Double-Layer Vehicle Speed Prediction Based on BPNN-LSTM for Off-Road Vehicles" Sensors 23, no. 14: 6385. https://doi.org/10.3390/s23146385
APA StyleLiu, J., Liang, Y., Chen, Z., Li, H., Zhang, W., & Sun, J. (2023). A Double-Layer Vehicle Speed Prediction Based on BPNN-LSTM for Off-Road Vehicles. Sensors, 23(14), 6385. https://doi.org/10.3390/s23146385