
An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project

 ,
,
Abstract
1. Introduction
- -
- costs (in terms of equipment, setup and maintenance) up to a quarter of the present standard.
- -
- single integrated device including on-board cellular LTE modem and solar panel charger, in order to simplify the installation as much as possible.
- -
- low power consumption, including all the aforementioned components, respect to the standard (6–8 Watts), in order to allow the receiver to be easily powered with solar panels and small backup batteries when installed in remote areas.
- -
- Real-time data acquisition from a network of GREAT stations (or from external third-party receivers).
- -
- Near-real-time spoofing and jamming detection.
- -
- raw GNSS data quality measurement using third party software like GNUT-ANUBIS Free 2.3 [16].
- -
- Computation of periodic (e.g., daily) station displacement based on a network adjustment approach.
- -
- Generation of alerts in case of anomalies in telemetry, GNSS data quality and abnormal displacements of the antenna (e.g., caused by physical movements of the monumentation structure or of the ground where the antenna is installed).
- -
- Generation of hourly RINEX 3 or 4 files (Hatanaka compressed and zipped) containing the observables of each receiver part of the network, and their publication through HTTPs or FTPS protocols toward the final users.
- -
- Computation of the hash string of each hourly RINEX file (a 512 bytes string that acts as a “signature” and that univocally identifies the original file) and its storage on an external blockchain implementation. In this way, every final user at every time can compare the hash string saved on the blockchain with the one that he/she can compute from the RINEX file downloaded by the server, in order to be sure that the RINEX file was not modified after its creation.
2. Related Works
3. Materials and Methods
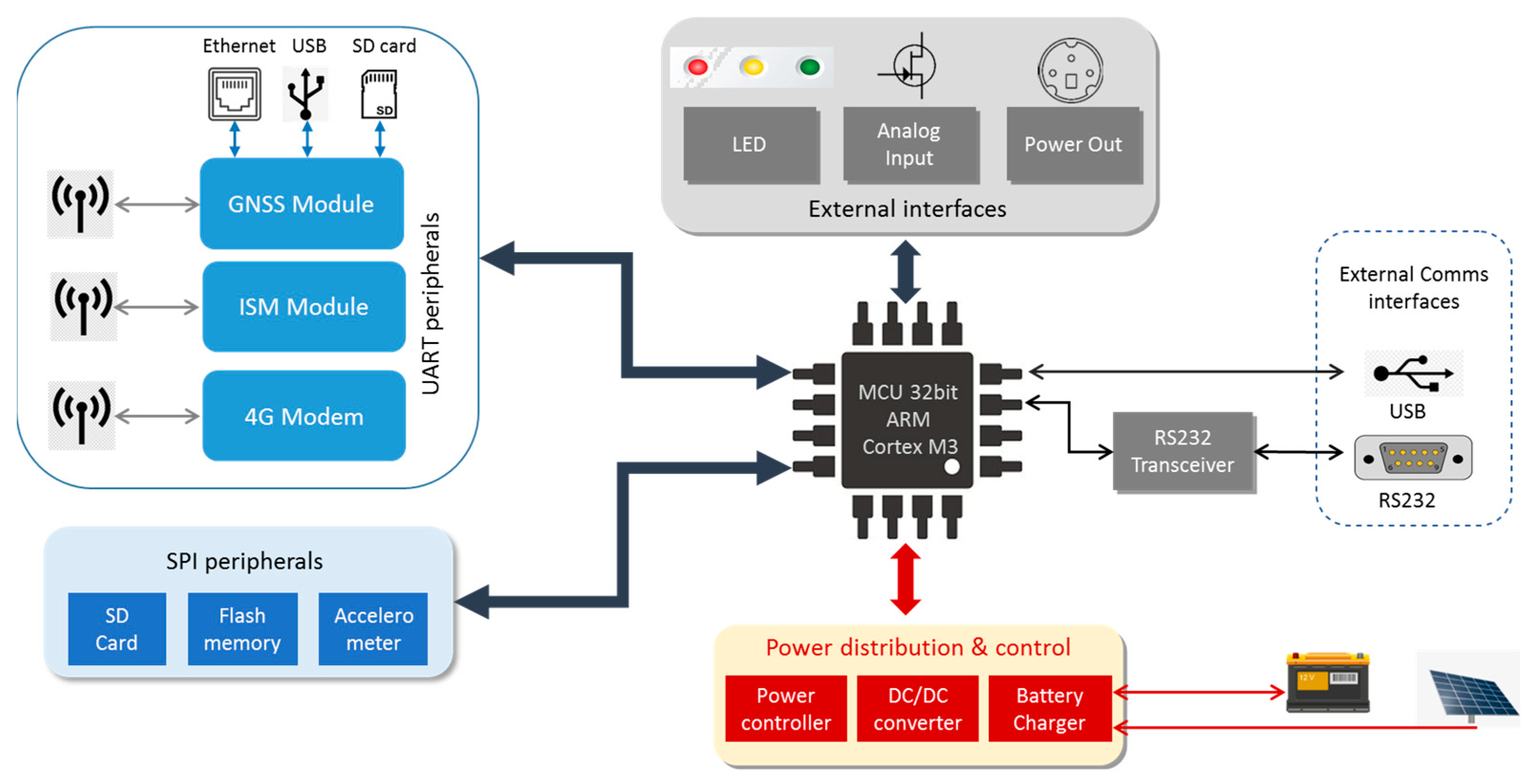
3.1. GREAT GNSS Receiver
- -
- power control and battery charging via photovoltaic panels.
- -
- wireless communication (4G + ISM 868 MHz).
- -
- monitoring grade accelerometer.
- -
- analog input channels for external sensors (standard 0–20 mA).
- -
- data storage (SD + Flash memory).
3.2. Acquisition and Processing Software
- -
- It tries to establish a connection with the GREAT receiver:
- ○
- If the connection is established, then it starts getting all acquired data in real-time (raw GNSS observables plus telemetry), and to interpret the GREAT binary protocol, in order to separate the different data types.
- ○
- If a connection is not successful or if during the acquisition the connection is lost with the receiver, a warning message is promptly generated and sent to the “email/SMS sender” in order to warn the user in almost-real-time.
- -
- GNSS data acquired by the previous module are passed to the “real-time spoofing detector”, which verifies the authenticity of the acquired data:
- ○
- If data pass the check, then they are published in real-time through the integrated NTRIP caster and are saved into the temporary “raw data archive”.
- ○
- In case of spoofing or tampering detection, then data are discarded, and an alert is raised and transmitted in almost-real-time to the “email/SMS sender”.
- -
- It converts the binary files containing the raw GNSS observables of all stations part of the network into hourly RINEX files with observables sampled at 1 Hz (format 3.04 or 4.0, Hatanaka compressed and g-zipped) and archives them in the filesystem. Such an archive can then be published to possible final users with an FTP implementation. The module warns the user with email/SMS in case a specific conversion process fails or in case of unavailability of an expected binary file.
- -
- It computes the SHA-512 hash string [27] of each generated RINEX file and saves them into a blockchain implementation. In detail, we have used an Amazon AWS Quantum Ledger Database (QLDB) instance [28] for demonstration purposes, but alternative solutions can be easily exploited. The SHA-512 hash string univocally identifies the content of the RINEX file since every possible modification (even of a single byte) of the content drives to the computation of a completely different hash. Therefore, every user can verify the absence of any data tampering on the file after its creation simply computing the SHA-512 hash of the file he/she owns and comparing it with the one computed by the processing server software just after the file creation and retrieved from the blockchain. Moreover, storing the hash string on a blockchain implementation guarantees that no-one, even the owner of the processing software, can modify the initial value of the hash string after its initial upload.
- -
- It computes a set of quality parameters related to the raw GNSS data acquired in the last hour, such as percentage of acquired over expected GNSS epochs and observables, percentage of observables with cycle slips, average multipath and carrier to noise ratio. All parameters are computed for each frequency of each tracked satellite system. In order to generate trustable results, quality indexes are computed exploiting an instance of the G-NUT Anubis Free software [16], which is embedded in the PDP.
- -
- It computes the average telemetry parameters (battery voltage, solar panel voltage, number of CRC errors and average SD-card writing time, cellular signal strength, etc.) belonging to data acquired in the last hour.
- -
- It generates possible warning messages in case of detection of anomalous values on GNSS quality and telemetry. The software compares the last updates of all computed variables with a set of thresholds defined by the user. If any threshold is exceeded, then a message is generated and transmitted to the user by email.
- -
- It computes the accurate and precise antenna phase center displacement in the last period. Such a computation is based on a static-differential approach working with double differenced carrier phases observables [29,30]. The computation is realized exploiting an upgraded version of the DISPLAYCE software tool developed by YetItMoves [31]. The development activity carried out in the framework of the GREAT project and in the previous H2020 TURNkey project [32] allowed to extend the functionalities of the original DISPLAYCE software described in [31] and initially meant to work with single frequency data, introducing the software routines required to handle multi-frequency GNSS observables, thus allowing to manage regional scale baselines up to 200–300 Km. The most important features added to the computation software include:
- ○
- the exploitation of the ionospheric-free linear combinations of GNSS observables, which are computed on the input L1, L2 and L5 observables and used in the positioning process.
- ○
- the exploitation of solid tide and ocean tide loading (OTL) models, the latter exploiting the OTL parameters computed for each specific location by the Onsala Ocean Tide Loading provider [33].
- ○
- the possibility to perform a simple “network adjustment” strategy on the results of baseline processing, that is to compute the differential displacements of each GREAT station with respect to two or more reference stations, whose a priori coordinates are known with an high degree of confidence (e.g., stations belonging to national or international permanent station networks such as IGS or EUREF), and then to estimate the absolute coordinates of the station with a least square approach [34].
3.3. User Front-End
4. Field Validation
4.1. Île-de-France Testbed
- -
- a roof pallet with a steel structure, 1 m mast with 60 mm diameter, two force arms to support the mast on the steel structure and serrated jaws. The structure has been custom built for Teria by a local manufacturer.
- -
- six concrete slabs.
- -
- two triangular plates with three screws to ensure the levelling of the antenna.
- -
- two horizontal steel racks to support the cabinet on the mast.
4.2. Wallonia Testbed
4.3. Field Assessment Procedure
- -
- Number of gaps in real-time data transmission with duration longer than 120 s.
- -
- Average and maximum length of data gaps.
- -
- Minimum battery voltage.
- -
- Average and minimum cellular signal strength (as recorded by the embedded LTE modem).
- -
- Average and minimum percentage of acquired/expected epochs computed on hourly basis.
- -
- Average and minimum percentage of acquired/expected observables computed on hourly basis and for each frequency of each satellite system.
- -
- Average and maximum percentage of cycle slips computed on hourly basis, for each frequency of each satellite system.
- -
- Average and maximum multipath on code-pseudo-ranges computed on hourly basis, for each frequency and satellite system.
- -
- Average and minimum C/N0 computed on hourly basis, for each frequency of each satellite system.
- -
- Root mean square (RMS) of the daily 3D displacements of the station computed with the network adjustment process described in Section 3.2.
- GNSS data acquisition at 1 Hz (GPS + GLO + GAL, all frequencies enabled) and their remote real-time transmission to the processing server using the internal LTE modem (called “GREAT mode” in the following).
- GNSS data acquisition disabled with LTE module powered on (idle mode).
- GREAT mode with disabled remote transmission (LTE module powered off).
- Idle mode with the LTE module powered off.
- -
- The maximum current found multiplied by the maximum voltage.
- -
- The maximum current found multiplied by the minimum voltage.
- -
- The minimum current found multiplied by the maximum voltage.
- -
- The minimum current found multiplied by the minimum voltage.
5. Results
5.1. Île-de-France Testbed
5.2. Wallonia Testbed
5.3. Analysis of the Results
- -
- Telemetry data acquired in the first month after installation demonstrate that all stations were able to work with a high degree of continuity: on average, the stations transmitted data for more than 96.5% of the time (worse case of VIT200FRA) and there was only a reduced number of interruptions: apart from VIT200FRA, the other five stations had an average interruption less than 2 min and the number of interruptions per day longer than 2 min is limited to less than one, on average. In all cases, the maximum interruption time is less than 30 min. This evidence proves that there is no interference of GNSS toward the LTE module, which is mounted on the same electronic board. Moreover, the choice of using an omni-directional LTE antenna placed inside the protective cabinets guaranteed enough signal strength to avoid relevant interruptions in data transmission.
- -
- For what concerns the power supply subsystem based on photovoltaic panels and backup batteries (in the first testbed), the minimum measured value of the battery voltage (12.23 Volts measured by STC200FRA) proves that it is correctly dimensioned given the device power consumption and the installation site.
- -
- The results summarized in Figure 13, Figure 14, Figure 15, Figure 16 and Figure 17 and in the tables in Appendix A show that in all cases the receivers provided a high percentage of acquired over expected observables on all GPS and GALILEO frequencies. The average value is higher than 67% in case of GPS L1, 65% in case of GPS L2, 69% and 71% in case of GALILEO E1 and E5a/b, respectively. It must be remarked that the percentage of observables in the GPS L5 frequency is less than the one in L1 and L2 because only modernized GPS satellites (Block IIF or newer) transmit such a signal: in May 2023, only 18 operational satellites over 31 are delivering the L5 signals.
- -
- The percentage of cycle slips is negligible, i.e., average values are always significantly lower than 1% on all stations and tracked signals. A high amount of cycle slips indicates a possible issue with the power supply (high ripples or an oscillating voltage are not correctly managed by the GNSS chipset) or electromagnetic or physical disturbances in the environment near the installation site (both factors affecting the continuous tracking of the satellite). This is not the case in both test sites, featuring different power supply subsystems (photovoltaic panels in France and AC/DC converters in Belgium). Moreover, this result demonstrates that the LTE modem (which is always turned on for real-time data transmission) does not interfere with the GNSS receiver.
- -
- The average C/N0 is always higher than 39.5 dBHz and commonly higher than 43 dBHz: this is proof of the correct functioning of the GNSS antenna and of the adequacy of the selected coaxial cables.
- -
- Finally, the detected multipath is acceptable on all sites (average values always less than 23 cm), which is proof of the suitability of the environment near the selected installation sites. Moreover, the low multipath detected over long periods of time and on all tracked frequencies is proof of the adequate performance of the selected antenna models, despite their low-cost. In general, the comparison between the results achieved with the two antenna models exploited in the two testbeds, with identical receivers points out that, even with a very low-cost GNSS antenna like the ArduSimple ANT3B-CAL, the quality of the results is good and comparable with the one of a medium range antenna like the Tallysman VSP-6337L.
- -
- Data reported in Table A2 and Table A5 and the graph about the cycle slip percentage (Figure 15) demonstrate that the performance of GLONASS tracking is sensibly degraded, in particular in terms of higher number of cycle slips on L1 frequency: this applies to all installation sites (even if it is particularly evident in MLV200FRA), despite of the exploited antennas and power supply type. The reason for this finding is currently under investigation.
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KPI | MEL200FRA | MLV200FRA | STC200FRA | VIT200FRA | ||||
|---|---|---|---|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.0 | 52.5 | 97.7 | 84.2 | 97.4 | 62.5 | 96.5 | 30.0 |
| Avg/Min % of acquired L1 obs. | 80.3 | 40.7 | 75.6 | 46.4 | 66.9 | 42.6 | 80.0 | 24.9 |
| Avg/Min % of acquired L2 obs. | 78.8 | 38.6 | 74.2 | 33.9 | 65.0 | 39.5 | 78.3 | 20.9 |
| Avg/Min % of acquired L5 obs. | 47.4 | 21.3 | 49.3 | 18.8 | 41.6 | 21.3 | 47.4 | 20.5 |
| Avg/Max % of obs. with cycle slip L1 | 0.03 | 0.36 | 0.02 | 0.26 | 0.17 | 0.72 | 0.04 | 0.44 |
| Avg/Max % of obs. with cycle slip L2 | 0.03 | 0.36 | 0.02 | 0.35 | 0.15 | 0.53 | 0.04 | 0.57 |
| Avg/Max % of obs. with cycle slip L5 | 0.03 | 0.36 | 0.02 | 0.27 | 0.12 | 0.73 | 0.03 | 0.40 |
| Avg/Min C/N0 L1 [dBHz] | 44.9 | 40.0 | 46.1 | 41.2 | 44.3 | 35.9 | 45.0 | 39.3 |
| Avg/Min C/N0 L2 [dBHz] | 40.7 | 36.0 | 43.3 | 39.5 | 39.6 | 33.3 | 40.7 | 35.2 |
| Avg/Min C/N0 L5 [dBHz] | 48.0 | 43.7 | 49.2 | 46.0 | 48.0 | 41.5 | 49.0 | 45.4 |
| Avg/Max multipath L1 [cm] | 22.2 | 28.4 | 19.3 | 25.2 | 17.4 | 26.3 | 22.3 | 31.7 |
| Avg/Max multipath L2 [cm] | 10.5 | 20.7 | 9.9 | 18.4 | 21.6 | 34.0 | 15.2 | 22.9 |
| Avg/Max multipath L5 [cm] | 10.5 | 22.1 | 7.6 | 14.2 | 16.5 | 42.3 | 10.1 | 18.0 |
| KPI | MEL200FRA | MLV200FRA | STC200FRA | VIT200FRA | ||||
|---|---|---|---|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.0 | 52.5 | 97.7 | 84.2 | 97.4 | 62.5 | 96.5 | 30.0 |
| Avg/Min % of acquired G1 obs. | 78.0 | 26.0 | 68.2 | 18.6 | 57.9 | 27.1 | 73.4 | 31.6 |
| Avg/Min % of acquired G2 obs. | 66.8 | 24.8 | 57.6 | 14.9 | 47.9 | 23.3 | 61.5 | 23.2 |
| Avg/Max % of obs. with cycle slip G1 | 1.96 | 10.09 | 7.66 | 17.51 | 1.30 | 6.60 | 1.75 | 12.72 |
| Avg/Max % of obs. with cycle slip G2 | 0.10 | 0.75 | 1.43 | 16.14 | 0.42 | 4.39 | 0.07 | 0.54 |
| Avg/Min C/N0 G1 [dBHz] | 47.6 | 43.9 | 48.7 | 44.6 | 46.2 | 39.8 | 47.6 | 44.3 |
| Avg/Min C/N0 G2 [dBHz] | 46.4 | 43.2 | 48.3 | 45.0 | 45.8 | 32.5 | 46.7 | 43.8 |
| Avg/Max multipath G1 [cm] | 24.6 | 35.0 | 17.5 | 36.6 | 34.3 | 69.4 | 25.6 | 39.7 |
| Avg/Max multipath G2 [cm] | 12.9 | 22.1 | 9.2 | 19.2 | 24.6 | 91.6 | 14.3 | 21.2 |
| KPI | MEL200FRA | MLV200FRA | STC200FRA | VIT200FRA | ||||
|---|---|---|---|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.0 | 52.5 | 97.7 | 84.2 | 97.4 | 62.5 | 96.5 | 30.0 |
| Avg/Min % of acquired E1 obs. | 79.6 | 49.0 | 65.0 | 16.1 | 69.5 | 21.8 | 79.1 | 46.9 |
| Avg/Min % of acquired E5b obs. | 79.7 | 49.0 | 65.0 | 16.1 | 71.8 | 23.7 | 79.4 | 46.9 |
| Avg/Min % of acquired E5a obs. | 79.7 | 49.0 | 65.0 | 16.1 | 71.5 | 23.3 | 79.4 | 46.9 |
| Avg/Max % of obs. with cycle slip E1 | 0.03 | 0.34 | 0.02 | 0.25 | 0.18 | 1.73 | 0.04 | 0.42 |
| Avg/Max % of obs. with cycle slip E5b | 0.03 | 0.34 | 0.02 | 0.25 | 0.10 | 1.07 | 0.03 | 0.42 |
| Avg/Max % of obs. with cycle slip E5a | 0.03 | 0.43 | 0.02 | 0.26 | 0.14 | 1.35 | 0.03 | 0.42 |
| Avg/Min C/N0 E1 [dBHz] | 43.9 | 41.8 | 45.0 | 42.4 | 43.8 | 39.6 | 44.0 | 41.6 |
| Avg/Min C/N0 E5b [dBHz] | 47.0 | 44.5 | 49.0 | 46.9 | 47.1 | 41.3 | 47.5 | 44.6 |
| Avg/Min C/N0 E5a [dBHz] | 45.4 | 41.6 | 46.6 | 43.2 | 45.8 | 39.3 | 46.6 | 44.0 |
| Avg/Max multipath E1 [cm] | 17.3 | 23.6 | 12.7 | 23.6 | 12.9 | 28.0 | 17.9 | 26.5 |
| Avg/Max multipath E5b [cm] | 9.5 | 16.0 | 6.6 | 13.9 | 14.1 | 32.2 | 8.8 | 14.2 |
| Avg/Max multipath E5a [cm] | 8.6 | 15.5 | 6.6 | 11.2 | 13.1 | 31.1 | 8.3 | 14.0 |
| KPI | LIEG00BEL | WAVR00BEL | ||
|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.7 | 78.3 | 97.8 | 72.5 |
| Avg/Min % of acquired L1 obs. | 73.4 | 55.6 | 83.7 | 63.8 |
| Avg/Min % of acquired L2 obs. | 73.4 | 55.6 | 83.7 | 63.8 |
| Avg/Min % of acquired L5 obs. | 43.3 | 24.1 | 49.4 | 33.4 |
| Avg/Max % of obs. with cycle slip L1 | 0.02 | 0.15 | 0.04 | 0.44 |
| Avg/Max % of obs. with cycle slip L2 | 0.02 | 0.15 | 0.04 | 0.44 |
| Avg/Max % of obs. with cycle slip L5 | 0.02 | 0.15 | 0.03 | 0.31 |
| Avg/Min C/N0 L1 [dBHz] | 45.3 | 43.7 | 44.2 | 42.3 |
| Avg/Min C/N0 L2 [dBHz] | 41.5 | 36.9 | 39.5 | 34.2 |
| Avg/Min C/N0 L5 [dBHz] | 48.0 | 45.9 | 47.4 | 44.6 |
| Avg/Max multipath L1 [cm] | 19.6 | 26.3 | 22.4 | 37.4 |
| Avg/Max multipath L2 [cm] | 8.9 | 14.0 | 13.9 | 22.0 |
| Avg/Max multipath L5 [cm] | 8.8 | 20.2 | 11.1 | 21.4 |
| KPI | LIEG00BEL | WAVR00BEL | ||
|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.7 | 78.3 | 97.8 | 72.5 |
| Avg/Min % of acquired G1 obs. | 72.6 | 38.7 | 73.4 | 40.0 |
| Avg/Min % of acquired G2 obs. | 60.9 | 30.5 | 61.9 | 27.1 |
| Avg/Max % of obs. with cycle slip G1 | 3.15 | 8.68 | 1.05 | 3.65 |
| Avg/Max % of obs. with cycle slip G2 | 0.06 | 0.20 | 0.06 | 0.34 |
| Avg/Min C/N0 G1 [dBHz] | 47.9 | 45.2 | 47.1 | 42.1 |
| Avg/Min C/N0 G2 [dBHz] | 47.3 | 43.9 | 45.9 | 39.9 |
| Avg/Max multipath G1 [cm] | 17.9 | 28.4 | 23.9 | 41.2 |
| Avg/Max multipath G2 [cm] | 10.3 | 18.1 | 15.7 | 31.2 |
| KPI | LIEG00BEL | WAVR00BEL | ||
|---|---|---|---|---|
| Avg/Min % of acquired epochs | 97.7 | 78.3 | 97.8 | 72.5 |
| Avg/Min % of acquired E1 obs. | 74.1 | 48.2 | 85.2 | 66.0 |
| Avg/Min % of acquired E5b obs. | 74.1 | 48.3 | 85.5 | 66.0 |
| Avg/Min % of acquired E5a obs. | 74.1 | 48.3 | 85.5 | 66.1 |
| Avg/Max % of obs. with cycle slip E1 | 0.02 | 0.14 | 0.06 | 0.57 |
| Avg/Max % of obs. with cycle slip E5b | 0.02 | 0.14 | 0.03 | 0.29 |
| Avg/Max % of obs. with cycle slip E5a | 0.02 | 0.14 | 0.03 | 0.29 |
| Avg/Min C/N0 E1 [dBHz] | 43.9 | 41.3 | 42.8 | 40.2 |
| Avg/Min C/N0 E5b [dBHz] | 47.8 | 45.4 | 46.6 | 43.4 |
| Avg/Min C/N0 E5a [dBHz] | 45.6 | 43.0 | 44.9 | 42.1 |
| Avg/Max multipath E1 [cm] | 14.5 | 23.6 | 19.6 | 33.8 |
| Avg/Max multipath E5b [cm] | 7.4 | 11.7 | 10.6 | 17.6 |
| Avg/Max multipath E5a [cm] | 8.1 | 14.8 | 10.0 | 17.6 |
References
- Wanninger, L. Introduction to Network RTK. IAG Working Group 4.5.1. 2004. Available online: www.wasoft.de (accessed on 28 June 2023).
- Pırtı, A. Evaluating the accuracy of post-processed kinematic (PPK) positioning technique. Geod. Cartogr. 2021, 47, 66–70. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, challenges, and opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Using GNSS Raw Measurements on Android Devices. Available online: https://www.euspa.europa.eu/system/files/reports/gnss_raw_measurement_web_0.pdf (accessed on 12 May 2023).
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhao, Q.; Xi, R.; Li, C.; Li, G. Review of Bridge Structural Health Monitoring Based on GNSS: From Displacement Monitoring to Dynamic Characteristic Identification. IEEE Access 2021, 9, 80043–80065. [Google Scholar] [CrossRef]
- Joubert, N.; Reid, T.G.; Noble, F. Developments in Modern GNSS and Its Impact on Autonomous Vehicle Architectures. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 2029–2036. [Google Scholar] [CrossRef]
- Wu, Q.; Shi, S.; Wan, Z.; Fan, Q.; Fan, P.; Zhang, C. Towards V2I Age-aware Fairness Access: A DQN Based Intelligent Vehicular Node Training and Test Method. Chin. J. Electron. 2022. [Google Scholar]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Schmidt, D.; Radke, K.; Camtepe, S.; Foo, E.; Ren, M. A Survey and Analysis of the GNSS Spoofing Threat and Countermeasures. ACM Comput. Surv. 2016, 48, 1–31. [Google Scholar] [CrossRef]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling high accuracy dynamic applications in urban environments using PPP and RTK on android multi-frequency and multi-GNSS smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar]
- ZED F9P on Ublox Website. Available online: https://www.u-blox.com/en/product/zed-f9p-module (accessed on 12 May 2023).
- Tunini, L.; Zuliani, D.; Magrin, A. Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors 2022, 22, 350. [Google Scholar] [CrossRef] [PubMed]
- Mosaic X5 on Septentrio Website. Available online: https://www.septentrio.com/en/products/gps/gnss-receiver-modules/mosaic-x5 (accessed on 12 May 2023).
- Vaclavovic, P.; Dousa, J. G-Nut/Anubis: Open-Source Tool for Multi-GNSS Data Monitoring with a Multipath Detection for New Signals, Frequencies and Constellations. In IAG 150 Years. International Association of Geodesy Symposia; Rizos, C., Willis, P., Eds.; Springer: Cham, Switzerland, 2015; Volume 143. [Google Scholar] [CrossRef]
- eMAPs Project Website. Available online: https://www.emaps.eu/ (accessed on 16 June 2023).
- BB-PROC Project Page on ESA NAVISP Website. Available online: https://navisp.esa.int/project/details/34/show (accessed on 16 June 2023).
- Crosta, P.; Sarnadas, R.; Clua, J.; Solé, M.; Romero, R.; Tavira, L.; Seco-Granados, G.; Tripiana, A. GNSS Performance Characterization Framework. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1438–1454. [Google Scholar] [CrossRef]
- GAMMA Project Website. Available online: https://www.projectgamma.eu/ (accessed on 16 June 2023).
- Teseo V on ST Website. Available online: https://www.st.com/en/automotive-infotainment-and-telematics/sta8100ga.html (accessed on 12 May 2023).
- LE910-WW on Telit Website. Available online: https://www.telit.com/wp-content/uploads/2023/05/Telit_LE910Cx_ThreadX_Product_Brief.pdf (accessed on 12 May 2023).
- ADXL355 on Analog Devices Website. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adxl354_355.pdf (accessed on 12 May 2023).
- Jovanovic, A.; Botteron, C.; Farine, P.A. Multi-test Detection and Protection Algorithm Against Spoofing Attacks on GNSS Receivers. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014. [Google Scholar] [CrossRef]
- Takasu, T. RTKLIB: Open Source Program Package for RTK-GPS, FOSS4G 2009 Tokyo, Japan, 2 November 2009. Available online: https://gpspp.sakura.ne.jp/paper2005/foss4g_2009_rtklib.pdf (accessed on 28 June 2023).
- Official RTKLIB Website. Available online: https://rtklib.com/ (accessed on 12 May 2023).
- National Institute of Standards and Technology: FIPS PUB 180-4: Secure Hash Standard. Federal Information Processing Standards Publication 180-4, U.S. Department of Commerce (March 2012). Available online: https://csrc.nist.gov/publications/fips/fips180-4/fips-180-4.pdf (accessed on 28 June 2023).
- Introduction to AWS QLDB. Available online: https://aws.amazon.com/it/qldb/ (accessed on 12 May 2023).
- Elliott, D.K.; Christopher, J.H. Understanding GPS: Principles and Applications; Kaplan, E.D., Ed.; Boston Artech House Publisher: Norwood, MA, USA, 1996; p. 33. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. GPS Theory and Practice; Springer: New York, NY, USA, 2001; ISBN 978-3-211-83534-0. [Google Scholar]
- Zuliani, D.; Tunini, L.; Di Traglia, F.; Chersich, M.; Curone, D. Cost-Effective, Single-Frequency GPS Network as a Tool for Landslide Monitoring. Sensors 2022, 22, 3526. [Google Scholar] [CrossRef] [PubMed]
- TURNkey Project Page on CORDIS. Available online: https://cordis.europa.eu/project/id/821046 (accessed on 12 May 2023).
- Penna, N.T.; Bos, M.S.; Baker, T.F.; Scherneck, H.G. Assessing the accuracy of predicted ocean tide loading displacement values. J. Geod. 2008, 82, 893–907. [Google Scholar] [CrossRef]
- Bagherbandi, M. Deformation monitoring using different least squares adjustment methods: A simulated study. KSCE J. Civ. Eng. 2016, 20, 855–862. [Google Scholar] [CrossRef]
- VSP6337L Antenna Description on Tallysman Wireless Website. Available online: https://www.tallysman.com/product/vsp6337l-verostar-triple-band-gnss-antenna-l-band/ (accessed on 12 May 2023).
- Official GNSS Antennas Calibration File Published by the IGS in ANTEX Format. Available online: https://files.igs.org/pub/station/general/igs14.atx (accessed on 12 May 2023).
- ANT3B-CAL Antenna Description on ArduSimple Website. Available online: https://www.ardusimple.com/product/calibrated-survey-gnss-quadband-antenna-ip67/ (accessed on 12 May 2023).
- PC/PCV Calibration of the Ardusimple ANT-3BCAL Antenna on the NGS Website. Available online: https://geodesy.noaa.gov/ANTCAL/LoadFile?file=AS-ANT3BCAL_NONE.atx (accessed on 12 May 2023).





















| GNSS Features | U-BLOX F9P | Septentrio MOSAIC X5 | ST TESEO V |
|---|---|---|---|
| Tracked constellations | GPS—GALILEO—GLONASS—BEIDOU (plus other) | GPS—GALILEO—GLONASS—BEIDOU (plus other) | GPS—GALILEO—GLONASS—BEIDOU (plus other) 1 |
| Tracked GPS signals | L1, L2C | L1, L2P, L2C, L5 | L1, L2C, L5 |
| Tracked GALILEO signals | E1, E5b | E1, E5a, E5b, E5 AltBoc, E6 | E1, E5a, E5b, E6 |
| Tracked GLONASS signals | G1, G2 | G1, G2, G2P, G3 CDMA (future use) | G1, G2 |
| Tracked BEIDOU signals | B1I, B2I | B1I, B1C, B2a, B2I, B3 | B1I, B2I, B2A |
| Max sampling rate | 20 Hz | 100 Hz | Not specified |
| Physical and electronics | |||
| Power consumption | 0.3 W typical, 0.4 W peak | 0.6 W typical, 1.1 W max | 0.8–1.0 W |
| Availability as chipset | Yes | Yes | Available on modules of third-party producers 2 |
| Physical dimension | 17.0 × 22.0 × 2.4 mm | 31 × 31 × 4 mm | 22.0 × 17.0 × 3.15 mm |
| Environmental | |||
| Operating temperature | −40–+85 °C | −40–+85 °C | −40–+85 °C |
| Storage temperature | −40–+85 °C | −55–+85 °C | −40–+90 °C |
| Cost (May 2021) | |||
| Unit cost (May 2021) | 175.9 EUR (1 pcs) to 155.2 EUR (>50 pcs) | About 600 EUR | Not officially available |
| Station Name | Location | Latitude [°] | Longitude [°] | Height [m] | Details |
|---|---|---|---|---|---|
| MEL200FRA | Melun | 48.539450 N | 2.672366 E | 129.1 | Installation on the roof of a concrete building (site of an old hospital) |
| MLV200FRA | Champs-sur-Marne | 48.841070 N | 2.6587478 E | 159.6 | Installation on the roof of a steel and glass structure (site of the ENSG school) |
| STC200FRA | Saint-Chéron | 48.556946 N | 2.117378 E | 182.4 | Installation on the roof of a concrete building (site of a local technical service society) |
| VIT200FRA | Vitry-sur-Seine | 48.773920 N | 2.375548 E | 144.2 | Installation on the roof of a concrete building (site of Teria headquarter) |
| Station Name | Location | Details |
|---|---|---|
| DOUR00BEL | Dourbes (BEL) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station=DOUR00BEL (accessed on 28 June 2023) |
| HERT00GBR | Hailsham (UK) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station=HERT00GBR (accessed on 28 June 2023) |
| LIL200FRA | Lille (FRA) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station= LIL200FRA (accessed on 28 June 2023) |
| MAN200FRA | Le Mans (FRA) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station= MAN200FRA (accessed on 28 June 2023) |
| VFCH00FRA | Villefranche-sur-Cher (FRA) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station= VFCH00FRA (accessed on 28 June 2023) |
| DOUR00BEL | HERT00GBR | LIL200FRA | MAN200FRA | VFCH00FRA | |
|---|---|---|---|---|---|
| MEL200FRA | 222.386 | 308.953 | 233.093 | 195.579 | 155.692 |
| MLV200FRA | 201.525 | 277.539 | 201.059 | 201.875 | 183.751 |
| STC200FRA | 248.348 | 287.325 | 240.285 | 157.423 | 143.514 |
| VIT200FRA | 217.921 | 275.274 | 211.824 | 184.611 | 171.644 |
| Station Name | Location | Latitude [°] | Longitude [°] | Height [m] | Details |
|---|---|---|---|---|---|
| LIEG00BEL | Liege | 50.582692 N | 5.566598 E | 301.7 | Installation on the roof of a concrete building |
| WAVR00BEL | Wavre | 50.689269 N | 4.615405 E | 184.6 | Installation on the roof of the M3S Belgium headquarter |
| Station Name | Location | Details |
|---|---|---|
| BRUX00BEL | Bruxelles (BEL) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station=BRUX00BEL (accessed on 28 June 2023) |
| EUSK00DEU | Euskirchen (GER) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station=EUSK00DEU (accessed on 28 June 2023) |
| REDU00BEL | Redu (BEL) | https://www.epncb.oma.be/_networkdata/siteinfo4onestation.php?station= REDU00BEL (accessed on 28 June 2023) |
| BRUX00BEL | EUSK00DEU | REDU00BEL | |
|---|---|---|---|
| LIEG00BEL | 88.663 | 85.303 | 71.293 |
| WAVR00BEL | 21.797 | 151.829 | 85.286 |
| KPI | MEL200FRA | MLV200FRA | STC200FRA | VIT200FRA |
|---|---|---|---|---|
| Number of gaps > 120 s | 19 | 19 | 18 | 47 |
| Average length of gaps [s] | 108 | 84 | 95 | 125 |
| Max length of gaps [s] | 1710 | 569 | 1350 | 2520 |
| Minimum battery voltage [V] | 12.58 | 12.32 | 12.23 | 12.34 |
| Average cell signal strength [dBm] | −57.83 | −53.42 | −64.58 | −62.35 |
| Minimum cell signal strength [dBm] | −72.30 | −59.30 | −77.90 | −78.30 |
| KPI | MEL200FRA | MLV200FRA | STC200FRA | VIT200FRA |
|---|---|---|---|---|
| Number of daily solutions | 20 | 20 | 20 | 20 |
| RMS Up displacement [mm] | 3.11 | 2.85 | 2.79 | 2.49 |
| RMS East displacement [mm] | 0.87 | 0.69 | 0.77 | 0.68 |
| RMS North displacement [mm] | 0.62 | 0.64 | 0.90 | 1.00 |
| KPI | LIEG00BEL | WAVR00BEL |
|---|---|---|
| Number of gaps > 120 s | 11 | 8 |
| Average length of gaps [s] | 83 | 79 |
| Max length of gaps [s] | 781 | 990 |
| Minimum battery voltage [V] | 11.58 | 11.57 |
| Average cell signal strength [dBm] | −75.26 | −67.85 |
| Minimum cell signal strength [dBm] | −88.10 | −88.30 |
| KPI | LIEG00BEL | WAVR00BEL |
|---|---|---|
| Number of daily solutions | 20 | 20 |
| RMS Up displacement [mm] | 1.85 | 1.66 |
| RMS East displacement [mm] | 0.57 | 0.57 |
| RMS North displacement [mm] | 0.37 | 0.65 |
| Operating Mode | Min Power Value MinA × MinV = m_P [W] | Average Power Value (M_P + m_P)/2 = P [W] | Max Power Value MinA × MinV [W] = m_P |
|---|---|---|---|
| GREAT mode with transmission | 0.1946 × 12.11 = 2.35 | 3.06 | 0.3107 × 12.14 = 3.77 |
| Idle mode with LTE on | 0.1894 × 12.12 = 2.29 | 2.95 | 0.2974 × 12.14 = 3.61 |
| GREAT mode with no transmission | 0.1788 × 12.12 = 2.16 | 2.39 | 0.2165 × 12.15 = 2.63 |
| Idle mode no transmission | 0.1732 × 12.02 = 2.08 | 2.28 | 0.2012 × 12.42 = 2.49 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Curone, D.; Savarese, G.; Antonini, M.; Baucry, R.; Amani, E.; Boulandet, A.; Cataldo, M.; Chambon, P.; Chersich, M.; Hussein, A.B.; et al. An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project. Sensors 2023, 23, 6032. https://doi.org/10.3390/s23136032
Curone D, Savarese G, Antonini M, Baucry R, Amani E, Boulandet A, Cataldo M, Chambon P, Chersich M, Hussein AB, et al. An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project. Sensors. 2023; 23(13):6032. https://doi.org/10.3390/s23136032
Chicago/Turabian StyleCurone, Davide, Giovanni Savarese, Mirko Antonini, Raphaël Baucry, Elie Amani, Antonin Boulandet, Marco Cataldo, Paul Chambon, Massimiliano Chersich, Ahmed B. Hussein, and et al. 2023. "An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project" Sensors 23, no. 13: 6032. https://doi.org/10.3390/s23136032
APA StyleCurone, D., Savarese, G., Antonini, M., Baucry, R., Amani, E., Boulandet, A., Cataldo, M., Chambon, P., Chersich, M., Hussein, A. B., Menuel, B., & Tsaturyan, A. (2023). An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project. Sensors, 23(13), 6032. https://doi.org/10.3390/s23136032