
Advanced Noise Indicator Mapping Relying on a City Microphone Network


Abstract
1. Introduction
2. Deterministic Noise Mapping Procedure
2.1. Linking Traffic Data and Open Street Map Road Categorization
2.2. Dynamic Traffic Model
2.3. Traffic Noise Emission Model
2.4. Sound Propagation Model
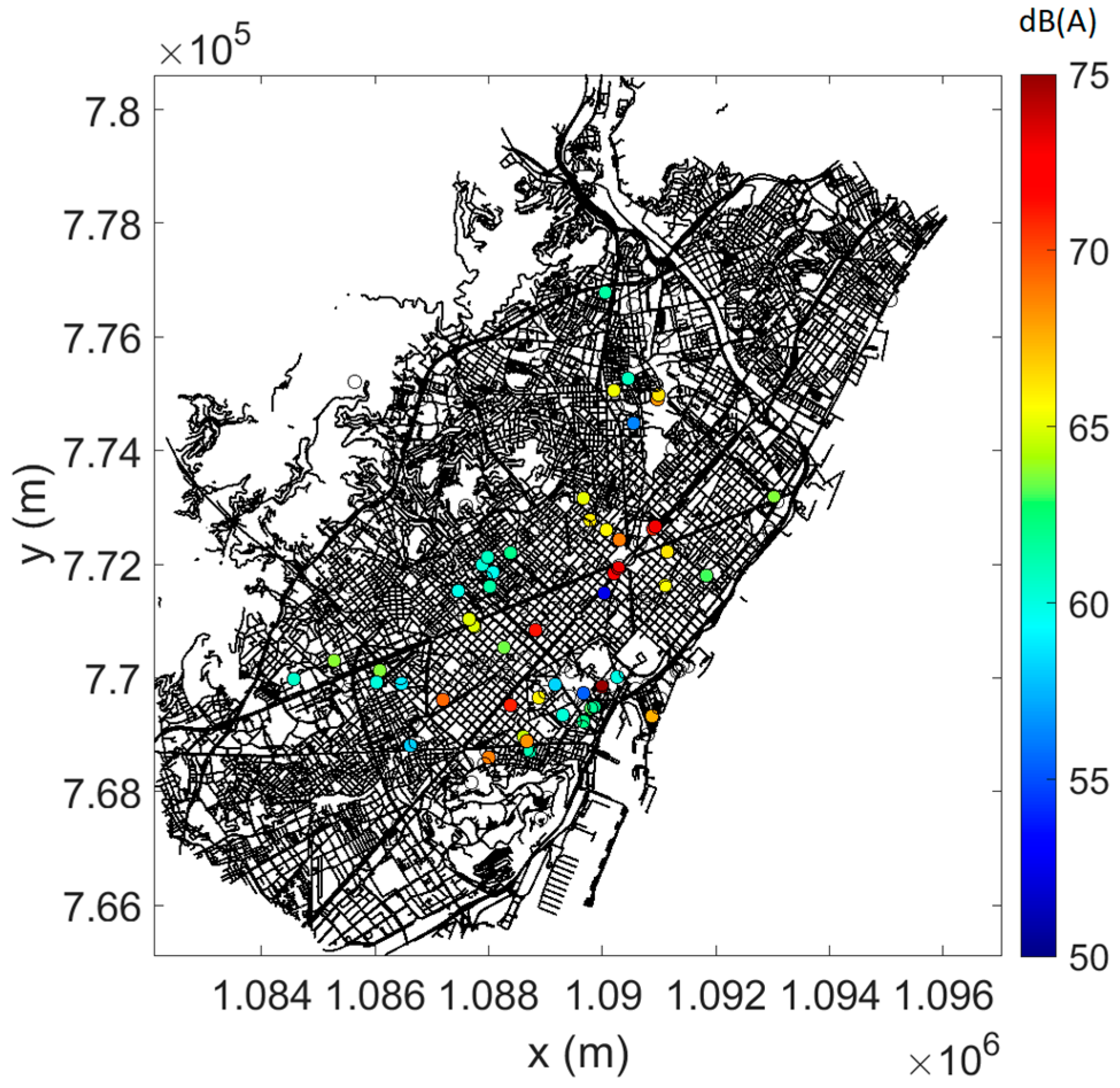
3. The Barcelona Microphone Sensor Network
3.1. Measurements and Data Handling
3.2. Machine Learning Fitting Procedure
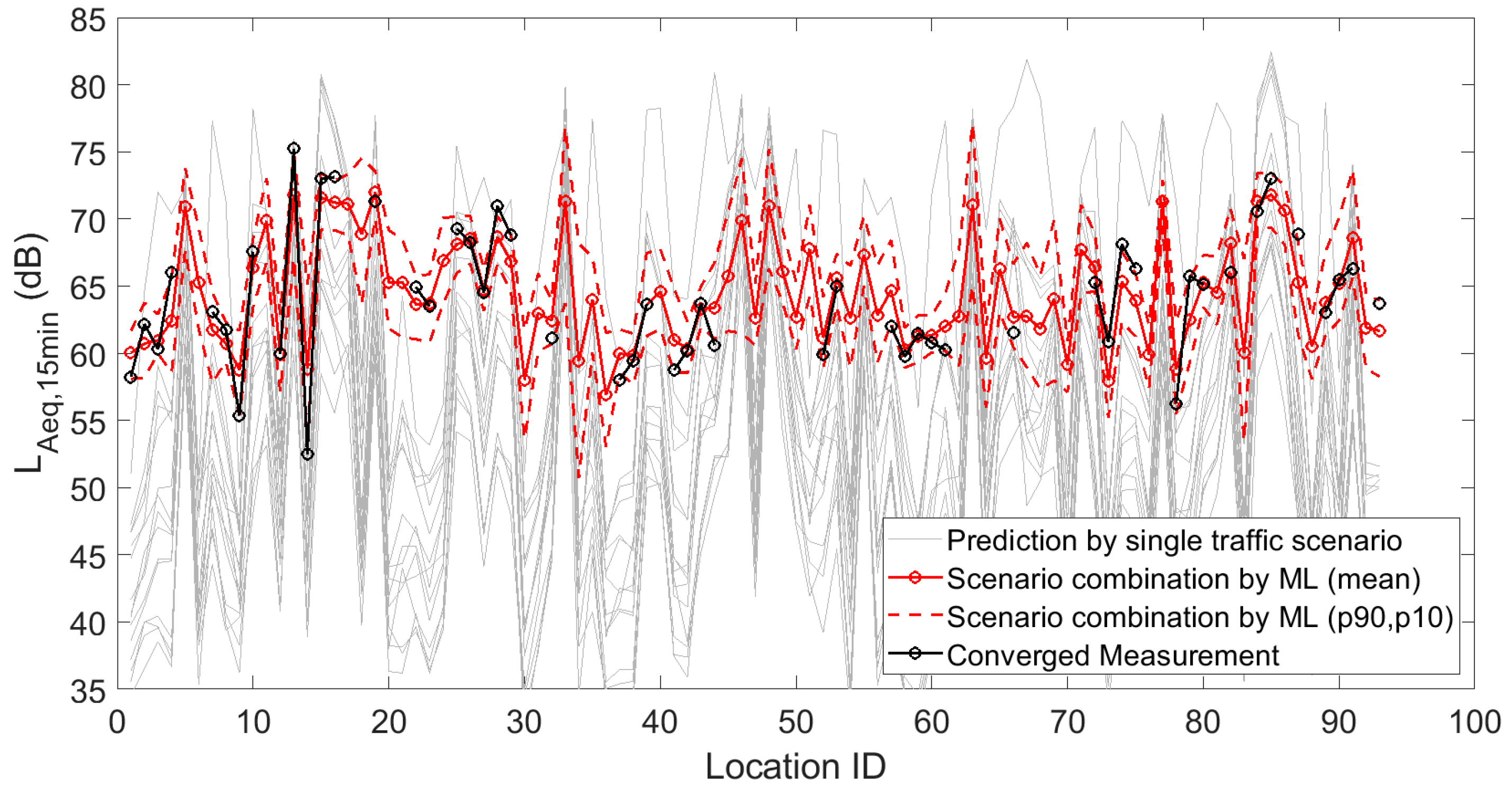
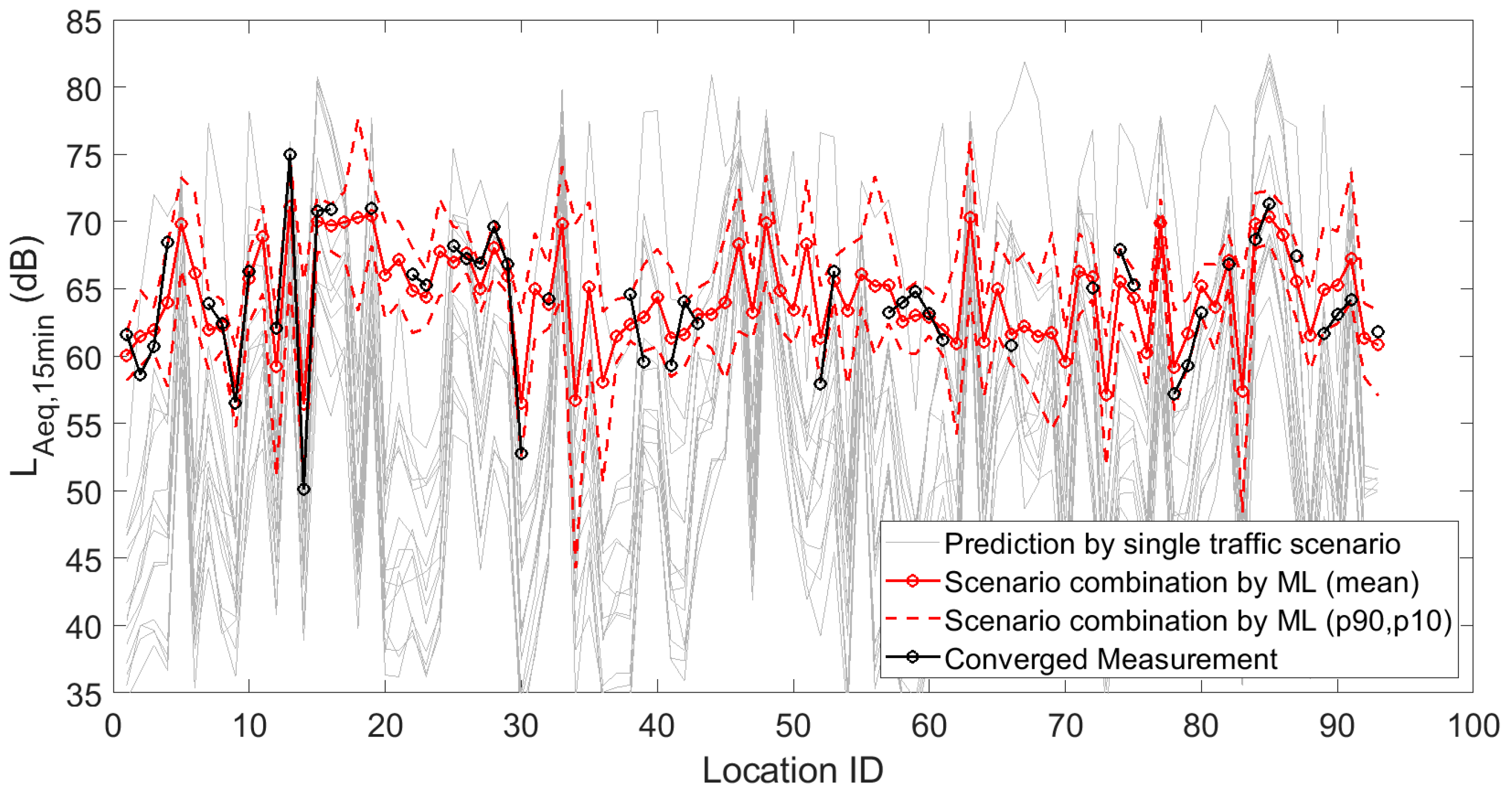
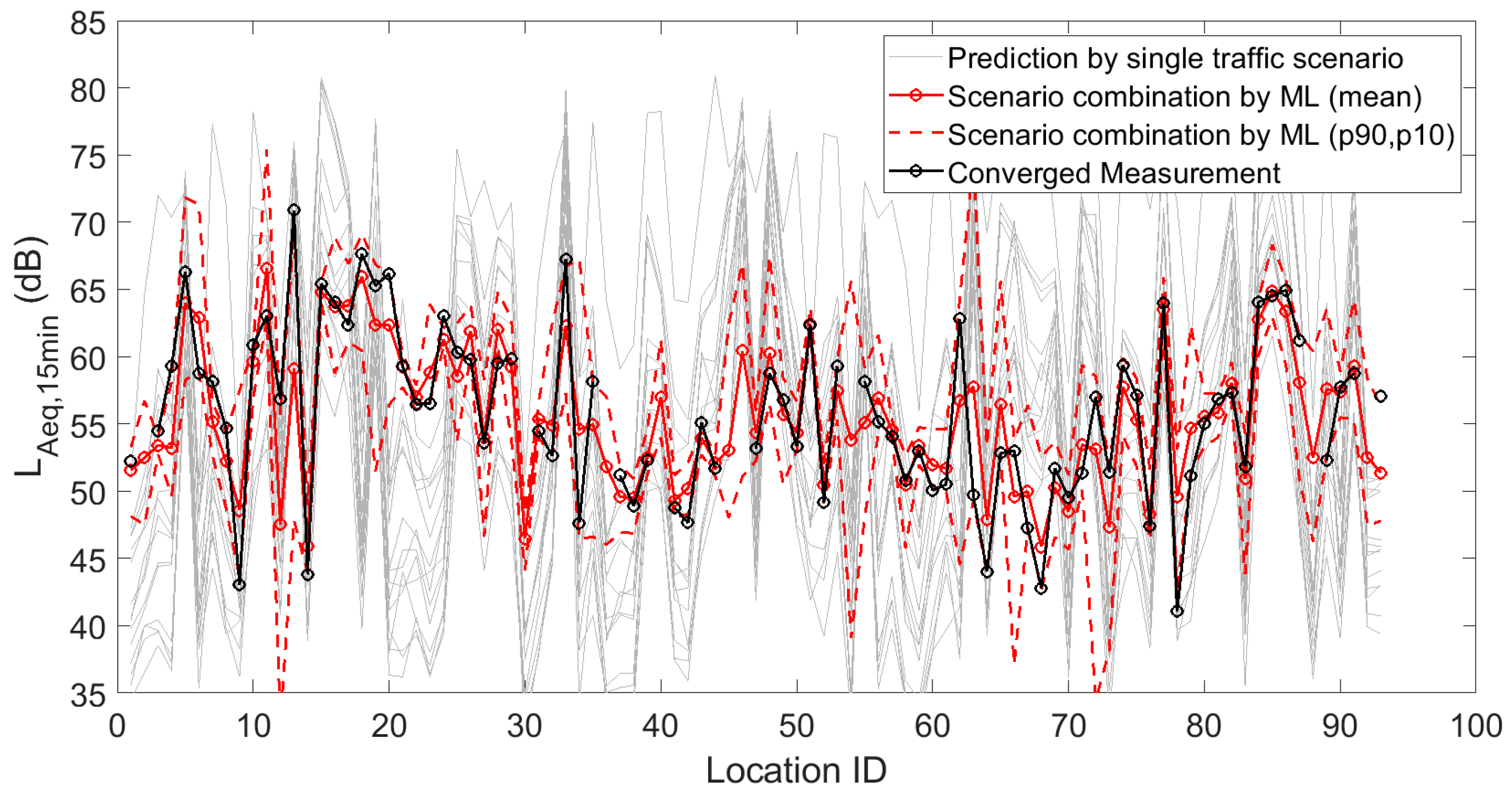
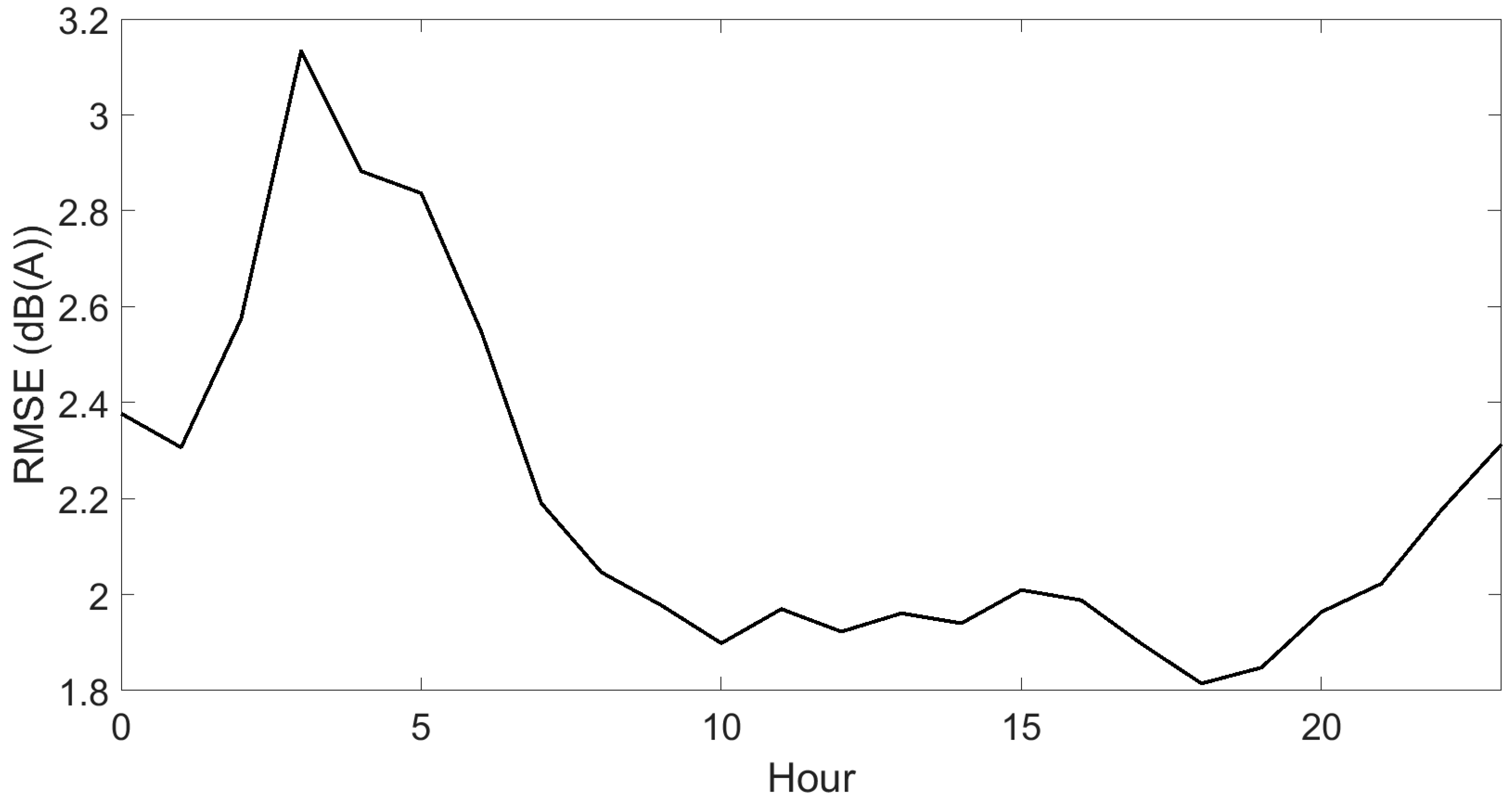
3.3. Predicting A-Weighted Equivalent Sound Pressure Levels
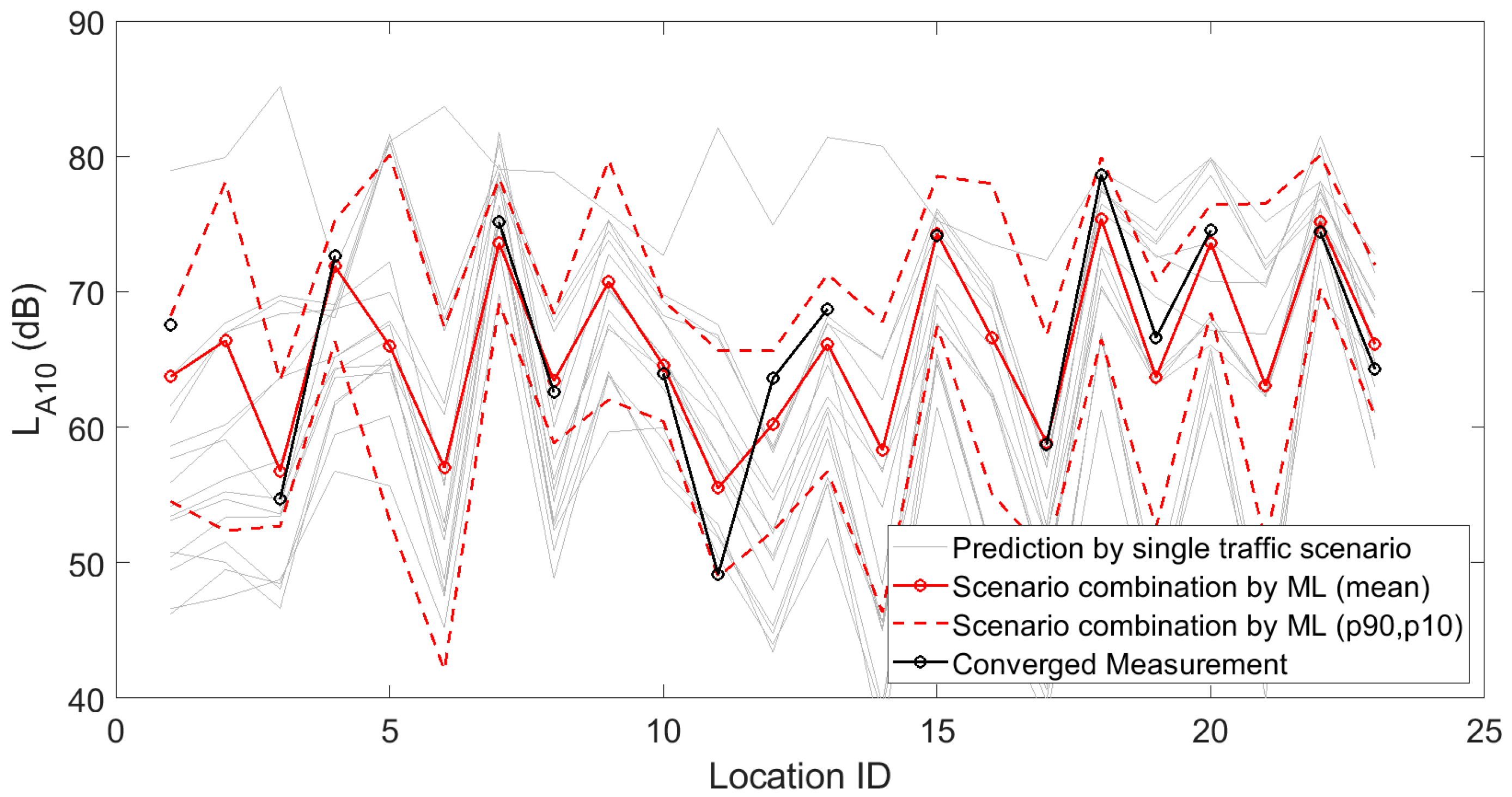
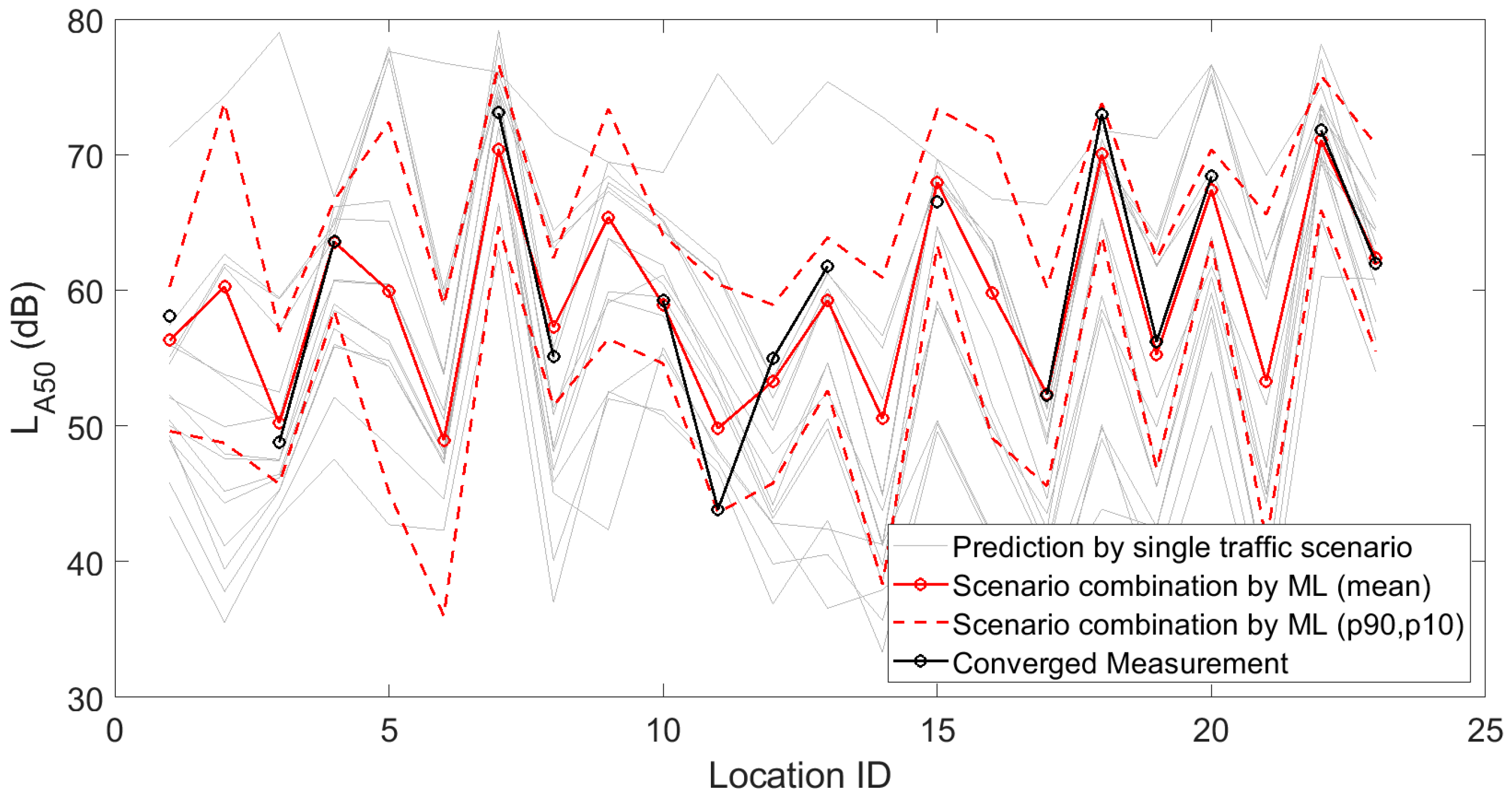
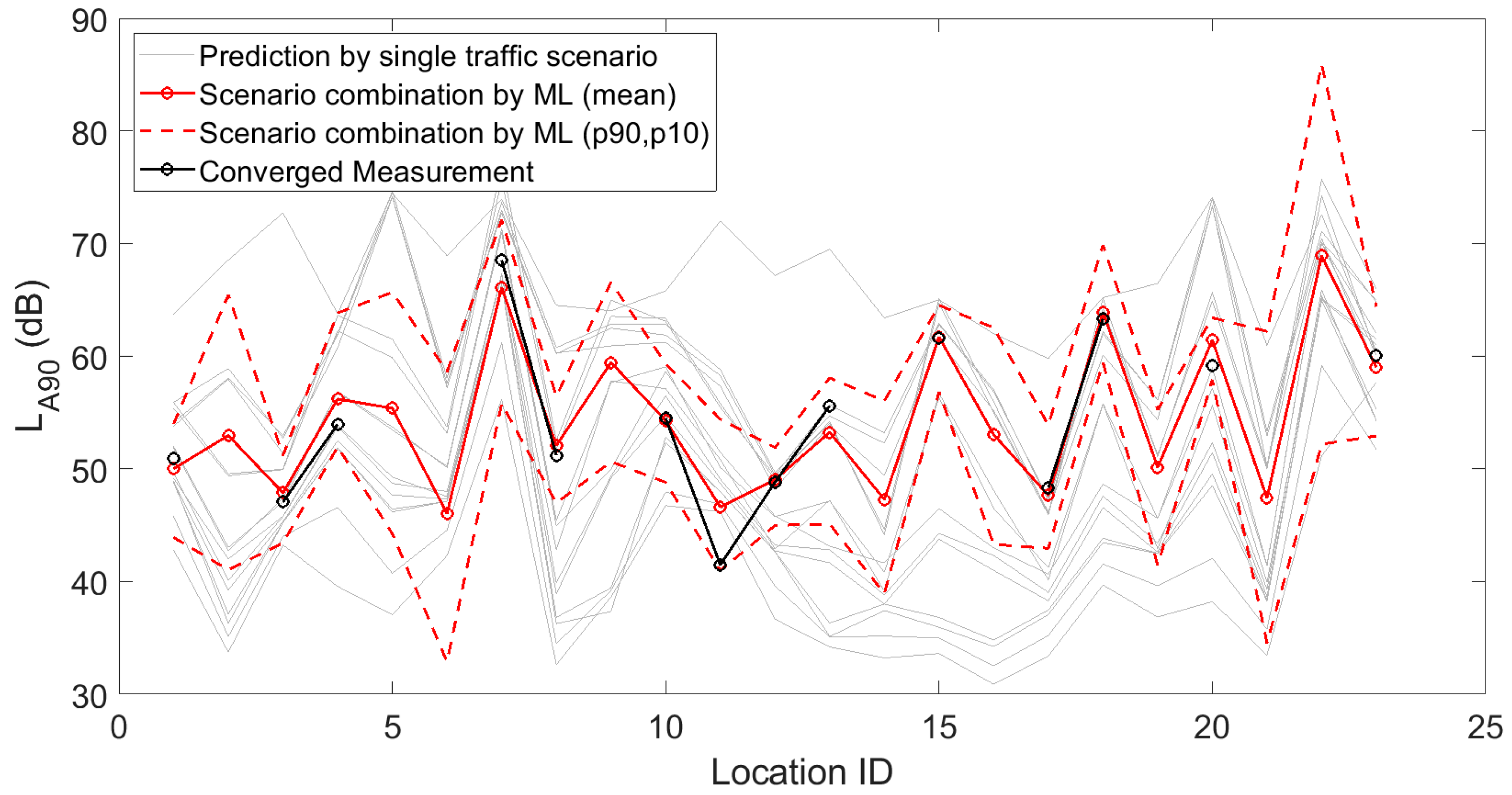
3.4. Predicting Advanced Noise Indicators
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Road Type | Vehicle Speed (km/h) | VI (SHV) Scenario 1 | VI (SHV) Scenario 2 | VI (SHV) Scenario 3 | VI (SHV) Scenario 4 | VI (SHV) Scenario 5 | VI (SHV) Scenario 6 |
| Day | motorway | 130 | 20,400 (15%) | 10,200 (15%) | 5100 (15%) | 20,400 (15%) | 20,400 (20%) | 20,400 (15%) |
| trunk | 110 | 8400 (15%) | 4200 (15%) | 2100 (15%) | 8400 (15%) | 33,600 (20%) | 16,800 (15%) | |
| primary | 80 | 4800 (0%) | 2400 (0%) | 1200 (0%) | 4800 (0%) | 19,200 (5%) | 9600 (0%) | |
| secondary | 80 | 3300 (0%) | 3300 (0%) | 3300 (0%) | 1750 (0%) | 26,400 (5%) | 6600 (0%) | |
| tertiary | 50 | 350 (0%) | 350 (0%) | 350 (0%) | 175 (0%) | 8400 (0%) | 2100 (0%) | |
| residential | 30 | 175 (0%) | 175 (0%) | 175 (0%) | 85 (0%) | 350 (0%) | 1400 (0%) | |
| service | 30 | 80 (0%) | 80 (0%) | 80 (0%) | 42 (0%) | 175 (0%) | 175 (0%) | |
| Evening | motorway | 130 | 20,400 (11%) | 10,200 (11%) | 5100 (11%) | 20,400 (11%) | 20,400 (16%) | 20,400 (11%) |
| trunk | 110 | 1600 (11%) | 800 (11%) | 400 (11%) | 1600 (11%) | 12,800 (16%) | 3200 (11%) | |
| primary | 80 | 1000 (0%) | 500 (0%) | 250 (0%) | 1000 (0%) | 8000 (5%) | 2000 (0%) | |
| secondary | 80 | 600 (0%) | 600 (0%) | 600 (0%) | 300 (0%) | 9600 (5%) | 1200 (0%) | |
| tertiary | 50 | 100 (0%) | 100 (0%) | 100 (0%) | 50 (0%) | 2400 (0%) | 600 (0%) | |
| residential | 30 | 50 (0%) | 50 (0%) | 50 (0%) | 25 (0%) | 100 (0%) | 400 (0%) | |
| service | 30 | 25 (0%) | 25 (0%) | 25 (0%) | 12 (0%) | 50 (0%) | 50 (0%) | |
| Night | motorway | 130 | 20,400 (32%) | 10,200 (32%) | 5100 (32%) | 20,400 (32%) | 20,400 (37%) | 20,400 (32%) |
| trunk | 110 | 800 (32%) | 400 (32%) | 200 (32%) | 800 (32%) | 6400 (37%) | 1600 (32%) | |
| primary | 80 | 640 (0%) | 320 (0%) | 160 (0%) | 640 (0%) | 5120 (5%) | 1280 (0%) | |
| secondary | 80 | 360 (0%) | 180 (0%) | 180 (0%) | 160 (0%) | 5760 (0.5%) | 720 (0%) | |
| tertiary | 50 | 50 (0%) | 50 (0%) | 50 (0%) | 25 (0%) | 1200 (0%) | 300 (0%) | |
| residential | 30 | 25 (0%) | 25 (0%) | 25 (0%) | 12 (0%) | 50 (0%) | 50 (0%) | |
| service | 30 | 12 (0%) | 12 (0%) | 12 (0%) | 6 (0%) | 25 (0%) | 100 (0%) | |
| VI (SHV) Scenario 7 | VI (SHV) Scenario 8 | VI (SHV) Scenario 9 | VI (SHV) Scenario 10 | VI (SHV) Scenario 11 | VI (SHV) Scenario 12 | VI (SHV) Scenario 13 | VI (SHV) Scenario 14 | VI (SHV) Scenario 15 |
| 33,300 (12.9%) | 28,404 (16.2%) | 34,315 (11.8%) | 35,481 (7.7%) | 20,400 (15%) | 20,400 (20%) | 20,400 (15%) | 20,400 (15%) | 20,400 (15%) |
| 26,928 (5.4%) | 21,012 (7.3%) | 26,794 (4.4%) | 27,705 (2.3%) | 8400 (15%) | 8400 (20%) | 16,800 (15%) | 8400 (15%) | 33,600 (15%) |
| 26,928 (5.4%) | 21,012 (7.3%) | 26,794 (4.4%) | 27,705 (2.3%) | 4800 (0%) | 4800 (5%) | 9600 (0%) | 4800 (0%) | 19,200 (0%) |
| 18,192 (10.7%) | 14,652 (13.6%) | 18,061 (9.8%) | 19,562 (5.7%) | 6600 (0%) | 6600 (5%) | 13,200 (0%) | 13,200 (0%) | 26,400 (0%) |
| 8928 (6.2%) | 7476 (7.6%) | 9050 (5.1%) | 9717 (2.6%) | 2100 (0%) | 2100 (5%) | 2100 (0%) | 4200 (0%) | 8400 (0%) |
| 3216 (3.5%) | 2400 (4.4%) | 3062 (3.1%) | 3404 (1.6%) | 350 (0%) | 350 (5%) | 350 (0%) | 700 (0%) | 1400 (0%) |
| 1098 (2.7%) | 768 (3.6%) | 1059 (2.4%) | 1110 (1.4%) | 175 (0%) | 175 (5%) | 175 (0%) | 350 (0%) | 700 (0%) |
| 20,400 (11%) | 20,400 (11%) | 20,400 (11%) | 20,400 (11%) | 20,400 (11%) | 20,400 (16%) | 20,400 (11%) | 20,400 (11%) | 20,400 (11%) |
| 3200 (11%) | 3200 (11%) | 3200 (11%) | 3200 (11%) | 1600 (11%) | 1600 (16%) | 3200 (11%) | 1600 (11%) | 12,800 (11%) |
| 2000 (0%) | 2000 (0%) | 2000 (0%) | 2000 (0%) | 1000 (0%) | 1000 (5%) | 2000 (0%) | 1000 (0%) | 8000 (0%) |
| 1200 (0%) | 2400 (0%) | 2400 (0%) | 2400 (0%) | 1200 (0%) | 1200 (5%) | 2400 (0%) | 4800 (0%) | 9600 (0%) |
| 600 (0%) | 600 (0%) | 600 (0%) | 600 (0%) | 600 (0%) | 600 (5%) | 600 (0%) | 1200 (0%) | 2400 (0%) |
| 400 (0%) | 100 (0%) | 100 (0%) | 100 (0%) | 100 (0%) | 100 (5%) | 100 (0%) | 200 (0%) | 400 (0%) |
| 50 (0%) | 50 (0%) | 50 (0%) | 50 (0%) | 50 (0%) | 50 (5%) | 50 (0%) | 100 (0%) | 200 (0%) |
| 20,400 (32%) | 20,400 (32%) | 20,400 (32%) | 20,400 (32%) | 20,400 (32%) | 20,400 (37%) | 20,400 (32%) | 20,400 (32%) | 20,400 (32%) |
| 1600 (32%) | 1600 (32%) | 1600 (32%) | 1600 (32%) | 800 (32%) | 800 (37%) | 1600 (32%) | 800 (32%) | 6400 (32%) |
| 1280 (0%) | 1280 (0%) | 1280 (0%) | 1280 (0%) | 640 (0%) | 640 (5%) | 1280 (0%) | 640 (0%) | 5120 (0%) |
| 1440 (0%) | 1440 (0%) | 1440 (0%) | 1440 (0%) | 720 (0%) | 720 (5%) | 1440 (0%) | 2880 (0%) | 5760 (0%) |
| 300 (0%) | 300 (0%) | 300 (0%) | 300 (0%) | 300 (0%) | 300 (5%) | 300 (0%) | 600 (0%) | 1200 (0%) |
| 50 (0%) | 50 (0%) | 50 (0%) | 50 (0%) | 50 (0%) | 50 (5%) | 50 (0%) | 100 (0%) | 200 (0%) |
| 25 (0%) | 25 (0%) | 25 (0%) | 25 (0%) | 25 (0%) | 25 (5%) | 25 (0%) | 50 (0%) | 100 (0%) |
References
- European Environmental Agency. Environmental Noise in Europe 2020; EEA report No 22/2019; Publications Office of the European Union: Copenhagen, Denmark, 2020.
- Licitra, G. Noise Mapping in the EU: Models and Procedures; CRC Press: Boca Raton, FL, USA; Taylor and Francis Group: Germantown, NY, USA, 2013. [Google Scholar]
- Kessels, F. EURO Advanced Tutorials on Operational Research. In Traffic Flow Modelling: Introduction to Traffic Flow Theory Through a Genealogy of Models; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- END. Directive 2002/49/EC of the European Parliament and of the Council of 25 June 2002 Relating to the Assessment and Management of Environmental Noise; European Commission: Brussels, Belgium, 2002. [Google Scholar]
- Rickenbacker, H.; Brown, F.; Bilec, M. Creating environmental consciousness in underserved communities: Implementation and outcomes of community-based environmental justice and air pollution research. Sust. Cities Soc. 2019, 47, 101473. [Google Scholar] [CrossRef]
- Barrigón Morillas, J.M.; Gómez Escobar, V.; Méndez Sierra, J.; Vílchez-Gómez, R.; Vaquero Martínez, J.; Trujillo Carmona, J. A categorization method applied to the study of urban road traffic noise. J. Acoust. Soc. Am. 2005, 117, 2844–2852. [Google Scholar] [CrossRef]
- Rey Gozalo, G.; Barrigón Morillas, J.M.; Gómez Escobar, V. Urban streets functionality as a tool for urban pollution management. Sci. Total Environ. 2013, 461–462, 453–461. [Google Scholar] [CrossRef] [PubMed]
- Zambon, G.; Benocci, R.; Brambilla, G. Statistical Road Classification Applied to Stratified Spatial Sampling of Road Traffic Noise in Urban Areas. Int. J. Environ. Res. 2016, 10, 411–420. [Google Scholar]
- Zambon, G.; Benocci, R.; Brambilla, G. Cluster categorization of urban roads to optimize their noise monitoring. Environ. Mon. Assess. 2016, 188, 26. [Google Scholar] [CrossRef] [PubMed]
- Barrigón Morillas, J.M.; Montes González, D.; Gómez Escobar, V.; Rey Gozalo, G.; Vílchez-Gómez, R. A proposal for producing calculated noise mapping defining the sound power levels of roads by street stratification. Environ. Pollut. 2021, 270, 116080. [Google Scholar] [CrossRef] [PubMed]
- Staab, J.; Schady, A.; Weigand, M.; Lakes, T.; Taubenböck, H. Predicting traffic noise using land-use regression—A scalable approach. J. Exp. Sci. Environ. Epidem. 2022, 32, 232–243. [Google Scholar] [CrossRef]
- Can, A.; Van Renterghem, T.; Rademaker, M.; Dauwe, S.; Thomas, P.; De Baets, B.; Botteldooren, D. Sampling approaches to predict urban street noise levels using fixed and temporary microphones. J. Environ. Monit. 2011, 13, 2710–2719. [Google Scholar] [CrossRef]
- Can, A.; Dekoninck, L.; Rademaker, M.; Van Renterghem, T.; De Baets, B.; Botteldooren, D. Noise measurements as proxies for traffic parameters in monitoring networks. Sci. Total Environ. 2011, 410, 198–204. [Google Scholar] [CrossRef]
- Brink, M. A Review of Explained Variance in Exposure-Annoyance Relationships in Noise Annoyance Surveys. In Proceedings of the International Commission on Biological Effects of Noise (ICBEN), Nara, Japan, 18–22 June 2014. [Google Scholar]
- WHO. Environmental Noise Guidelines for the European Region; WHO Regional Office for Europe: Geneva, Switzerland, 2018. [Google Scholar]
- Spence, C.; Zampini, M. Auditory contributions to multisensory product perception. Act. Acust. Acust. 2006, 92, 1009–1025. [Google Scholar]
- Kang, J.; Aletta, F.; Gjestland, T.; Brown, L.; Botteldooren, D.; Schulte-Fortkamp, B.; Lercher, P.; van Kamp, I.; Genuit, K.; Fiebig, A.; et al. Ten questions on the soundscapes of the built environment. Build. Environ. 2016, 108, 284–294. [Google Scholar] [CrossRef]
- Lionello, M.; Aletta, F.; Kang, J. A systematic review of prediction models for the experience of urban soundscapes. Appl. Acoust. 2020, 170, 107479. [Google Scholar] [CrossRef]
- Can, A.; Gauvreau, B. Describing and classifying urban sound environments with a relevant set of physical indicators. J. Acoust. Soc. Am. 2015, 137, 208–218. [Google Scholar] [CrossRef]
- Aumond, P.; Can, A.; De Coensel, B.; Botteldooren, D.; Ribeiro, C.; Lavandier, C. Modeling Soundscape Pleasantness Using perceptual Assessments and Acoustic Measurements Along Paths in Urban Context. Act. Acust. Acust. 2017, 103, 430–443. [Google Scholar] [CrossRef]
- Van Renterghem, T.; Thomas, P.; Dekoninck, L.; Botteldooren, D. Getting insight in the performance of noise interventions by mobile sound level measurements. Appl. Acoust. 2022, 185, 108385. [Google Scholar] [CrossRef]
- De Coensel, B.; Brown, A.L.; Tomerini, D. A road traffic noise pattern simulation model that includes distributions of vehicle sound power levels. Appl. Acoust. 2016, 111, 170–178. [Google Scholar] [CrossRef]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); Publications Office of the European Union: Luxembourg, 2012; 180p. [Google Scholar]
- Wei, W.; Botteldooren, D.; Van Renterghem, T.; Hornikx, M.; Forssén, J.; Salomons, E.; Ögren, M. Urban background noise mapping: The general model. Act. Acust. Acust. 2014, 100, 1098–1111. [Google Scholar] [CrossRef]
- Aumond, P.; Fortin, N.; Can, A. Overview of the NoiseModelling Open-Source Software Version 3 and its Applications. In Proceedings of the NOISE-CON Congress (261, 4, 2005–2011), Seoul, Republic of Korea, 12 October 2012. [Google Scholar]
- Bocher, E.; Guillaume, G.; Picaut, J.; Petit, G.; Fortin, N. NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps. ISPRS Int. J. Geo. Inform. 2019, 8, 130. [Google Scholar] [CrossRef]
- Le Bescond, V.; Can, A.; Aumond, P.; Gastineau, P. Open-source modeling chain for the dynamic assessment of road traffic noise exposure. Transp. Res. Part D Transp. Environ. 2021, 94, 102793. [Google Scholar] [CrossRef]
- Forssén, J.; Hornikx, M.; Botteldooren, D.; Wei, W.; Van Renterghem, T.; Ögren, M. A model of sound scattering by atmospheric turbulence for use in noise mapping calculations. Act. Acust. Acust. 2014, 100, 810–815. [Google Scholar] [CrossRef]
- Van Renterghem, T.; Horoshenkov, K.; Parry, J.; Williams, D. Statistical analysis of sound level predictions in refracting and turbulent atmospheres. Appl. Acoust. 2022, 185, 108426. [Google Scholar] [CrossRef]
- Matlab. The MathWorks Inc., version: 9.13.0 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022; Available online: https://www.mathworks.com (accessed on 1 December 2022).
- Hagan, M.; Demuth, H.; Beale, M.; De Jesus, O. Neural Network Design, 2nd ed.; Martin Hagan: Stillwater, OK, USA, 2014. [Google Scholar]
- Wunderli, J.-M.; Pieren, R.; Habermacher, M.; Vienneau, D.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Brink, M. Intermittency ratio: A metric reflecting short-term temporal variations of transportation noise exposure. J. Exp. Sci. Environ. Epidemiol. 2016, 26, 575–585. [Google Scholar] [CrossRef] [PubMed]
- Hall, F.L.; Papakyriakou, M.J.; Quirt, J.D. Comparison of outdoor microphone locations for measuring sound insulation of building facades. J. Sound Vib. 1984, 92, 559–567. [Google Scholar] [CrossRef]
- Memoli, G.; Paviotti, M.; Kephalopoulos, S.; Licitra, G. Testing the acoustical corrections for reflections on a facade. Appl. Acoust. 2008, 69, 479–495. [Google Scholar] [CrossRef]
- Mateus, M.; Carrilho, J.D.; Da Silva, M.G. An experimental analysis of the correction factors adopted on environmental noise measurements performed with window mounted microphones. Appl. Acoust. 2015, 87, 212–218. [Google Scholar] [CrossRef]
- Barrigón Morillas, J.M.; Montes González, D.; Rey Gozalo, G. A review of the measurement procedure of the ISO 1996 standard. Relationship with the European Noise Directive. Sci. Total Environ. 2016, 565, 595–606. [Google Scholar] [CrossRef] [PubMed]
- Heutschi, K. A simple method to evaluate the increase of traffic noise emission level due to buildings for a long straight street. Appl. Acoust. 1995, 44, 259–274. [Google Scholar] [CrossRef]
- Montes González, D.; Barrigón Morillas, J.M.; Rey Gozalo, G. The influence of microphone location on the results of urban noise measurements. Appl. Acoust. 2015, 90, 64–73. [Google Scholar] [CrossRef]
- ISO 9613-2; Acoustics-Attenuation of Sound Propagation Outdoors, Part 2: General Method of Calculation. International Organization for Standardization: Geneva, Switzerland, 1996; revised in 2017.
- Salomons, E.; Polinder, H.; Lohman, W.; Zhou, H.; Borst, H.; Miedema, H. Engineering modeling of traffic noise in shielded areas in cities. J. Acoust. Soc. Am. 2009, 126, 2340–2349. [Google Scholar] [CrossRef]
- Thomas, P.; Van Renterghem, T.; De Boeck, E.; Dragonetti, L.; Botteldooren, D. Reverberation-based urban street sound level prediction. J. Acoust. Soc. Am. 2013, 133, 3929–3939. [Google Scholar] [CrossRef]
- Jonasson, H. Acoustical Source Modelling of Road Vehicles. Act. Acust. Acust. 2007, 93, 173–184. [Google Scholar]
- Hadden, W.; Pierce, A. Sound diffraction around screens and wedges for arbitrary point source locations. J. Acoust. Soc. Am. 1981, 69, 1266–1276. [Google Scholar] [CrossRef]
- Öhrström, E.; Skånberg, A.; Svensson, H.; Gidlöf-Gunnarsson, A. Effects of road traffic noise and the benefit of access to quietness. J. Sound Vib. 2006, 295, 40–59. [Google Scholar] [CrossRef]
- Forssén, J.; Hornikx, M. Statistics of A-weighted road traffic noise levels in shielded urban areas. Act. Acust. Acust. 2006, 92, 998–1008. [Google Scholar]
- Farres, J.C. Barcelona Noise Monitoring Network. In Proceedings of the Euronoise 2015, Maastricht, The Netherlands, 31 May–3 June 2015; pp. 2315–2320. [Google Scholar]
- Mydlarz, C.; Sharma, M.; Lockerman, Y.; Steers, B.; Silva, C.; Bello, J.P. The Life of a New York City Noise Sensor Network. Sensors 2019, 19, 1415. [Google Scholar] [CrossRef]
- Mietlicki, F.; Mietlicki, C.; Sineau, M. An Innovative Approach for Long Term Environmental Noise Measurement: RUMEUR Network in the Paris Region. In Proceedings of the Euronoise 2015, Maastricht, The Netherlands, 31 May–3 June 2015; pp. 2315–2320. [Google Scholar]
- Van Renterghem, T.; Thomas, P.; Dominguez, F.; Dauwe, S.; Touhafi, A.; Dhoedt, B.; Botteldooren, D. On the ability of consumer electronics microphones for environmental noise monitoring. J. Environ. Mon. 2011, 13, 544–552. [Google Scholar] [CrossRef]
- Mydlarz, C.; Salamon, J.; Bello, J.P. The implementation of low-cost urban acoustic monitoring devices. Appl. Acoust. 2017, 117, 207–218. [Google Scholar] [CrossRef]
- Quintero, G.; Balastegui, A.; Romeu, J. A low-cost noise measurement device for noise mapping based on mobile sampling. Measurement 2019, 148, 106894. [Google Scholar] [CrossRef]
- Yang, D.; Zhao, J. Acoustic Wake-Up Technology for Microsystems: A Review. Micromachines 2023, 14, 129. [Google Scholar] [CrossRef]
- Buch, N.; Velastin, S.; Orwell, J. A Review of Computer Vision Techniques for the Analysis of Urban Traffic. IEEE Trans. Intell. Transport. Syst. 2011, 12, 920–939. [Google Scholar] [CrossRef]
- Fredianelli, L.; Carpita, S.; Bernardini, M.; Del Pizzo, L.; Brocchi, F.; Bianco, F.; Licitra, G. Traffic Flow Detection Using Camera Images and Machine Learning Methods in ITS for Noise Map and Action Plan Optimization. Sensors 2022, 22, 1929. [Google Scholar] [CrossRef] [PubMed]













| Close-by Traffic | Far Traffic | |||
|---|---|---|---|---|
| Radius around receiver (in m) | <500 | ≥500 and <2000 | ||
| Traffic (noise emission) modeling | Simplified dynamic traffic modeling following [22], at a 1 s time interval. | Aggregated traffic at discrete emission points. Number of emission points minimized by NoiseModelling [26] | ||
| If a direct line-of-sight path is possible | CNOSSOS sound propagation model [23] without reflections on vertical objects, without diffractions, and in a non-refracting atmosphere. | |||
| Only obstructed sound paths are present | CNOSSOS sound propagation model [23] including reflections on vertical objects (reflection order 2, maximum source-reflection distance 50 m) and including diffractions on horizontal edges. Downward refraction (“favorable conditions”) is assumed with 50% occurrence in any direction. | |||
| Turbulent scattering model [28] | ||||
| Rural/suburban | Dense urban fabric | |||
| Distance to façade (m) | Not applicable | 5 | ||
| City canyon width (m) | Not applicable | 15 | ||
| Building height (m) | 8 | 20 | ||
| Day | Night | Day | Night | |
| Cv2 (m4/3/s2) | 0.4 | 0.2 | 0.8 | 0.4 |
| CT2 (K2/m2/3) | 0.7 | 0.04 | 1.4 | 0.08 |
| Equivalent Sound Pressure Levels | Statistical Sound Pressure Levels | Number of Events above x dB(A) | Number of Events above a Specific Indicator | Sound Dynamics Indicators | Intermittency Ratio |
|---|---|---|---|---|---|
| Leq | LA01 | EN55 | ENLA10 | σAS | IntRatio |
| LAeq | LA05 | EN60 | ENLA50 | σCS | |
| LCeq | LA10 | EN65 | ENLA50 + 3 | LA10–LA90 | |
| LA50 | EN70 | ENLA50 + 10 | LC10–LC90 | ||
| LA90 | EN75 | ENLA50 + 15 | |||
| LA95 | EN80 | ENLA50 + 20 | |||
| LA99 | ENLAeq + 10 | ||||
| ENLAeq + 15 |
| Indicator | Day | Evening | Night |
|---|---|---|---|
| Leq (dB) | 1.9 | 2.2 | 1.8 |
| LAeq (dB) | 2.1 | 2.1 | 1.9 |
| LCeq (dB) | 2.1 | 2.3 | 2.0 |
| LA01 (dB) | 2.2 | 2.2 | 2.3 |
| LA05 (dB) | 2.4 | 2.4 | 2.1 |
| LA10 (dB) | 2.6 | 2.5 | 1.9 |
| LA50 (dB) | 2.2 | 2.3 | 2.3 |
| LA90 (dB) | 1.9 | 2.5 | 2.6 |
| LA95 (dB) | 2.1 | 2.6 | 2.0 |
| LA99 (dB) | 2.1 | 2.7 | 2.0 |
| σAS (dB) | 0.9 | 1.0 | 1.1 |
| σCS (dB) | 0.8 | 0.8 | 0.9 |
| LA10–LA90 (dB) | 2.3 | 2.4 | 2.5 |
| LC10–LC90 (dB) | 1.6 | 1.9 | 1.9 |
| EN55 (n.o.e.) 1 | 4.3 | 6.5 | 5.3 |
| EN60 (n.o.e.) | 7.4 | 7.0 | 8.4 |
| EN65 (n.o.e.) | 10.6 | 7.8 | 9.4 |
| EN70 (n.o.e.) | 12.3 | 10.9 | 2.7 |
| EN75 (n.o.e.) | 3.4 | 3.9 | 4.2 |
| EN80 (n.o.e.) | 3.2 | 3.1 | 1.6 |
| ENLA10 (n.o.e.) | 4.9 | 4.8 | 4.8 |
| ENLA50 (n.o.e.) | 8.3 | 9.8 | 8.6 |
| ENLA50 + 3 (n.o.e.) | 7.8 | 8.8 | 6.2 |
| ENLA50 + 10 (n.o.e.) | 3.9 | 4.2 | 3.9 |
| ENLA50 + 15 (n.o.e.) | 1.8 | 2.1 | 2.5 |
| ENLA50 + 20 (n.o.e.) | 0.9 | 0.8 | 1.7 |
| ENLAeq + 10 (n.o.e.) | 1.0 | 1.0 | 1.3 |
| ENLA10 (n.o.e.) | 0.5 | 0.5 | 0.6 |
| IntRatio (%) | 4.9 | 6.1 | 5.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Renterghem, T.; Le Bescond, V.; Dekoninck, L.; Botteldooren, D. Advanced Noise Indicator Mapping Relying on a City Microphone Network. Sensors 2023, 23, 5865. https://doi.org/10.3390/s23135865
Van Renterghem T, Le Bescond V, Dekoninck L, Botteldooren D. Advanced Noise Indicator Mapping Relying on a City Microphone Network. Sensors. 2023; 23(13):5865. https://doi.org/10.3390/s23135865
Chicago/Turabian StyleVan Renterghem, Timothy, Valentin Le Bescond, Luc Dekoninck, and Dick Botteldooren. 2023. "Advanced Noise Indicator Mapping Relying on a City Microphone Network" Sensors 23, no. 13: 5865. https://doi.org/10.3390/s23135865
APA StyleVan Renterghem, T., Le Bescond, V., Dekoninck, L., & Botteldooren, D. (2023). Advanced Noise Indicator Mapping Relying on a City Microphone Network. Sensors, 23(13), 5865. https://doi.org/10.3390/s23135865