
Parking Time Violation Tracking Using YOLOv8 and Tracking Algorithms

Abstract
1. Introduction
2. Related Work
2.1. Object Detection
2.2. Vehicle Tracking
3. Proposed Parking Time Violation Algorithm
3.1. Dataset
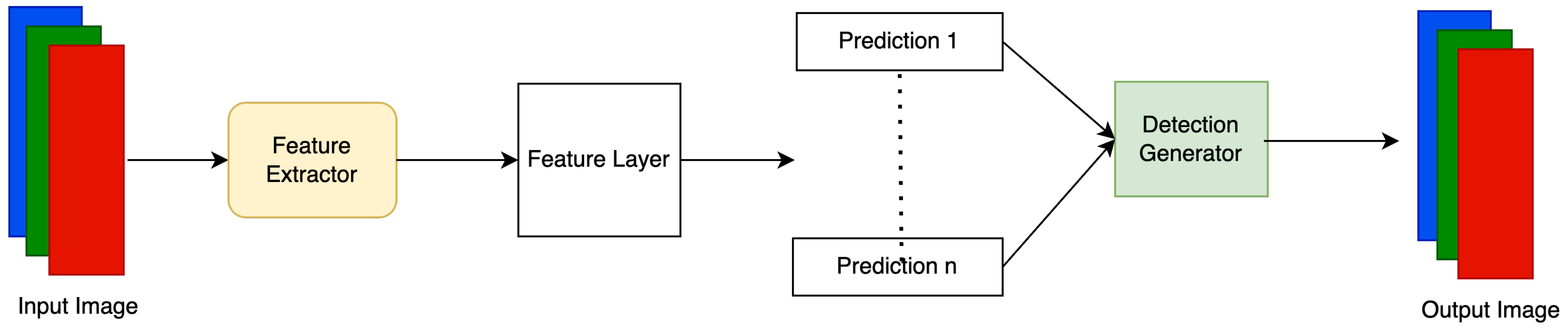
3.2. Vehicle Detection
3.3. Movement Tracking
3.4. Time Violation
3.5. Experimental Setup
3.6. Validation Criteria
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CEIC Flex. Thailand Number of Registered Vehicles; CEIC: Bangkok, Thailand, 2023. [Google Scholar]
- Dinh, T.; Kim, Y. A Novel Location-Centric IoT-Cloud Based On-Street Car Parking Violation Management System in Smart Cities. Sensors 2016, 16, 810. [Google Scholar] [CrossRef]
- Joseph, J.; Patil, R.; Narahari, S.; Didagi, Y.; Bapat, J.; Das, D. Wireless Sensor Network Based Smart Parking System. Sensors Transducers 2014, 162, 5–10. [Google Scholar]
- Akhawaji, R.; Sedky, M.; Soliman, A.H. Illegal Parking Detection Using Gaussian Mixture Model and Kalman Filter. In Proceedings of the 2017 IEEE/ACS 14th International Conference on Computer Systems and Applications (AICCSA), Hammamet, Tunisia, 30 October–3 November 2017; pp. 840–847. [Google Scholar] [CrossRef]
- Sarker, M.M.K. Detection and recognition of illegally parked vehicles based on an adaptive gaussian mixture model and a seed fill algorithm. J. Inf. Commun. Converg. Eng. 2015, 13, 97–204. [Google Scholar] [CrossRef]
- Chin Kit, N.; Cheong, S.; Yap, W.; Foo, Y.L. Outdoor Illegal Parking Detection System Using Convolutional Neural Network on Raspberry Pi. Int. J. Eng. Technol. 2018, 7, 17. [Google Scholar] [CrossRef]
- Xie, X.; Wang, C.; Chen, S.; Shi, G.; Zhao, Z. Real-Time Illegal Parking Detection System Based on Deep Learning. CoRR 2017. abs/1710.02546. Available online: http://xxx.lanl.gov/abs/1710.02546 (accessed on 15 April 2023).
- Tang, H.; Peng, A.; Zhang, D.; Liu, T.; Ouyang, J. SSD Real-Time Illegal Parking Detection Based on Contextual Information Transmission. Comput. Mater. Contin. 2019, 61, 293–307. [Google Scholar] [CrossRef]
- Tamang, T.; Baral, S.; Paing, M.P. Classification of White Blood Cells: A Comprehensive Study Using Transfer Learning Based on Convolutional Neural Networks. Diagnostics 2022, 12, 2903. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. 2014. Available online: http://xxx.lanl.gov/abs/1311.2524 (accessed on 15 April 2023).
- Wojke, N.; Bewley, A.; Paulus, D. Simple Online and Realtime Tracking with a Deep Association Metric. CoRR 2017. abs/1703.07402. Available online: http://xxx.lanl.gov/abs/1703.07402 (accessed on 20 April 2023).
- Paing, M.P.; Pintavirooj, C. Adenoma Dysplasia Grading of Colorectal Polyps Using Fast Fourier Convolutional ResNet (FFC-ResNet). IEEE Access 2023, 11, 16644–16656. [Google Scholar] [CrossRef]
- Paing, M.P.; Cho, O.S.; Cho, J.W. Histopathological Classification of Colorectal Polyps using Deep Learning. In Proceedings of the 2023 International Conference on Information Networking (ICOIN), Bangkok, Thailand, 11–14 January 2023; pp. 472–477. [Google Scholar] [CrossRef]
- Keakultanes, R.; Paing, M.P.; Pintavirooj, C. Automatic Cardiopulmonary Resuscitation System. In Proceedings of the 2022 14th Biomedical Engineering International Conference (BMEiCON), Songkhla, Thailand, 10–13 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Janai, J.; Güney, F.; Behl, A.; Geiger, A. Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art. arXiv 2017, arXiv:1704.05519. Available online: http://xxx.lanl.gov/abs/1704.05519 (accessed on 15 April 2023).
- Zhao, Z.Q.; Zheng, P.; tao Xu, S.; Wu, X. Object Detection with Deep Learning: A Review. 2019. Available online: http://xxx.lanl.gov/abs/1807.05511 (accessed on 29 April 2023).
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. 2016. Available online: http://xxx.lanl.gov/abs/1506.02640 (accessed on 15 April 2023).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision – ECCV 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar] [CrossRef]
- Mao, Q.C.; Sun, H.M.; Liu, Y.B.; Jia, R.S. Mini-YOLOv3: Real-Time Object Detector for Embedded Applications. IEEE Access 2019, 7, 133529–133538. [Google Scholar] [CrossRef]
- Dan, N. Parking Management System and Methods. U.S. Patent 10/066,215, 31 July 2003. [Google Scholar]
- Huang, C.C.; Tai, Y.S.; Wang, S.J. Vacant Parking Space Detection Based on Plane-Based Bayesian Hierarchical Framework. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 1598–1610. [Google Scholar] [CrossRef]
- Menéndez, J.M.; Postigo, C.; Torres, J. Vacant parking area estimation through background subtraction and transience map analysis. IET Intell. Transp. Syst. 2015, 9, 835–841. [Google Scholar] [CrossRef]
- Patel, R.; Meduri, P. Car detection based algorithm for automatic parking space detection. In Proceedings of the 2020 19th IEEE International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 14–17 December 2020; pp. 1418–1423. [Google Scholar]
- Grbić, R.; Koch, B. Automatic vision-based parking slot detection and occupancy classification. Expert Syst. Appl. 2023, 225, 120147. [Google Scholar] [CrossRef]
- de Almeida, P.R.L.; Oliveira, L.S.; Britto, A.S., Jr.; Silva, E.J., Jr.; Koerich, A.L. PKLot—A Robust Dataset for Parking Lot Classification. Expert Syst. Appl. 2015, 42, 4937–4949. [Google Scholar] [CrossRef]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Meghini, C.; Vairo, C. Deep learning for decentralized parking lot occupancy detection. Expert Syst. Appl. 2017, 72, 327–334. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, H.; Yang, J.; Jiao, H.; Feng, Z.; Chen, L.; Gao, T. Fast vehicle detection algorithm in traffic scene based on improved SSD. Measurement 2022, 201, 111655. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yuan, S.; Liu, J.; Zhao, X.; Yang, Y.; Liu, Y. Vehicle detection from road image sequences for intelligent traffic scheduling. Comput. Electr. Eng. 2021, 95, 107406. [Google Scholar] [CrossRef]
- Jung, H.; Choi, M.K.; Jung, J.; Lee, J.H.; Kwon, S.; Jung, W.Y. ResNet-Based Vehicle Classification and Localization in Traffic Surveillance Systems. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 934–940. [Google Scholar] [CrossRef]
- Luo, W.; Xing, J.; Milan, A.; Zhang, X.; Liu, W.; Kim, T.K. Multiple object tracking: A literature review. Artif. Intell. 2021, 293, 103448. [Google Scholar] [CrossRef]
- Sun, Z.; Chen, J.; Chao, L.; Ruan, W.; Mukherjee, M. A Survey of Multiple Pedestrian Tracking Based on Tracking-by-Detection Framework. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 1819–1833. [Google Scholar] [CrossRef]
- Hou, X.; Wang, Y.; Chau, L.P. Vehicle Tracking Using Deep SORT with Low Confidence Track Filtering. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Buric, M.; Ivasic-Kos, M.; Pobar, M. Player Tracking in Sports Videos. In Proceedings of the 2019 IEEE International Conference on Cloud Computing Technology and Science (CloudCom), Sydney, Australia, 11–23 December 2019; pp. 334–340. [Google Scholar] [CrossRef]
- Parico, A.I.B.; Ahamed, T. Real Time Pear Fruit Detection and Counting Using YOLOv4 Models and Deep SORT. Sensors 2021, 21, 4803. [Google Scholar] [CrossRef]
- Liu, T.; Liu, Y. Deformable Model-Based Vehicle Tracking and Recognition Using 3-D Constrained Multiple-Kernels and Kalman Filter. IEEE Access 2021, 9, 90346–90357. [Google Scholar] [CrossRef]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple Online and Realtime Tracking. arXiv 2016, arXiv:1602.00763. Available online: http://xxx.lanl.gov/abs/1602.00763 (accessed on 15 April 2023).
- Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X. ByteTrack: Multi-Object Tracking by Associating Every Detection Box. 2022. Available online: http://xxx.lanl.gov/abs/2110.06864 (accessed on 10 May 2023).
- Cao, J.; Pang, J.; Weng, X.; Khirodkar, R.; Kitani, K. Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking. 2023. Available online: http://xxx.lanl.gov/abs/2203.14360 (accessed on 10 May 2023).
- Jocher, G.; Chaurasia, A.; Qiu, J. YOLO by Ultralytics. 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 23 May 2023).
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. CoRR 2016. abs/1612.08242. Available online: http://xxx.lanl.gov/abs/1612.08242 (accessed on 10 May 2023).
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. CoRR 2018. abs/1804.02767. Available online: http://xxx.lanl.gov/abs/1804.02767 (accessed on 12 May 2023).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracker | HOTA | DetA | AssA | MOTA | IDF1 |
|---|---|---|---|---|---|
| SORT [36] | 47.9 | 72.0 | 31.2 | 91.8 | 50.8 |
| DeepSORT [11] | 45.6 | 71.0 | 29.7 | 87.8 | 47.9 |
| ByteTrack [37] | 47.3 | 71.6 | 31.4 | 89.5 | 52.5 |
| OC-SORT [38] | 54.6 | 80.4 | 40.2 | 89.6 | 54.6 |
| OCSORT + Linear Interp [38] | 55.1 | 80.4 | 40.4 | 92.2 | 54.9 |
| Definition | Description |
|---|---|
| True Positive (TP) | Vehicle is present and the algorithm can track vehicle. |
| True Negative (TN) | Vehicle is not present and the algorithm does not track vehicle |
| False Positive (FP) | Vehicle is not present but the algorithm tracks vehicle. |
| False Negative (FN) | Vehicle is present but the algorithm does not track vehicle |
| Model | Dataset | FP | FN | IDS | MOTA |
|---|---|---|---|---|---|
| YOLOv8 + DeepSORT | Location 4 | 0 | 0 | 0 | 1 |
| Location 2 | 0 | 0 | 0 | 1 | |
| Location 3 | 1 | 0 | 0 | 0.96 | |
| Location 1 | 0 | 3 | 0 | 0.90 | |
| YOLOv8 + OC-SORT | Location 4 | 0 | 0 | 0 | 1 |
| Location 2 | 0 | 0 | 7 | 0.76 | |
| Location 3 | 1 | 0 | 2 | 0.90 | |
| Location 1 | 0 | 4 | 1 | 0.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, N.; Baral, S.; Paing, M.P.; Chawuthai, R. Parking Time Violation Tracking Using YOLOv8 and Tracking Algorithms. Sensors 2023, 23, 5843. https://doi.org/10.3390/s23135843
Sharma N, Baral S, Paing MP, Chawuthai R. Parking Time Violation Tracking Using YOLOv8 and Tracking Algorithms. Sensors. 2023; 23(13):5843. https://doi.org/10.3390/s23135843
Chicago/Turabian StyleSharma, Nabin, Sushish Baral, May Phu Paing, and Rathachai Chawuthai. 2023. "Parking Time Violation Tracking Using YOLOv8 and Tracking Algorithms" Sensors 23, no. 13: 5843. https://doi.org/10.3390/s23135843
APA StyleSharma, N., Baral, S., Paing, M. P., & Chawuthai, R. (2023). Parking Time Violation Tracking Using YOLOv8 and Tracking Algorithms. Sensors, 23(13), 5843. https://doi.org/10.3390/s23135843