



Exploiting Pre-Trained Convolutional Neural Networks for the Detection of Nutrient Deficiencies in Hydroponic Basil

Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Setup
2.2. Dataset
2.2.1. Image Acquisition
2.2.2. Preparing Dataset
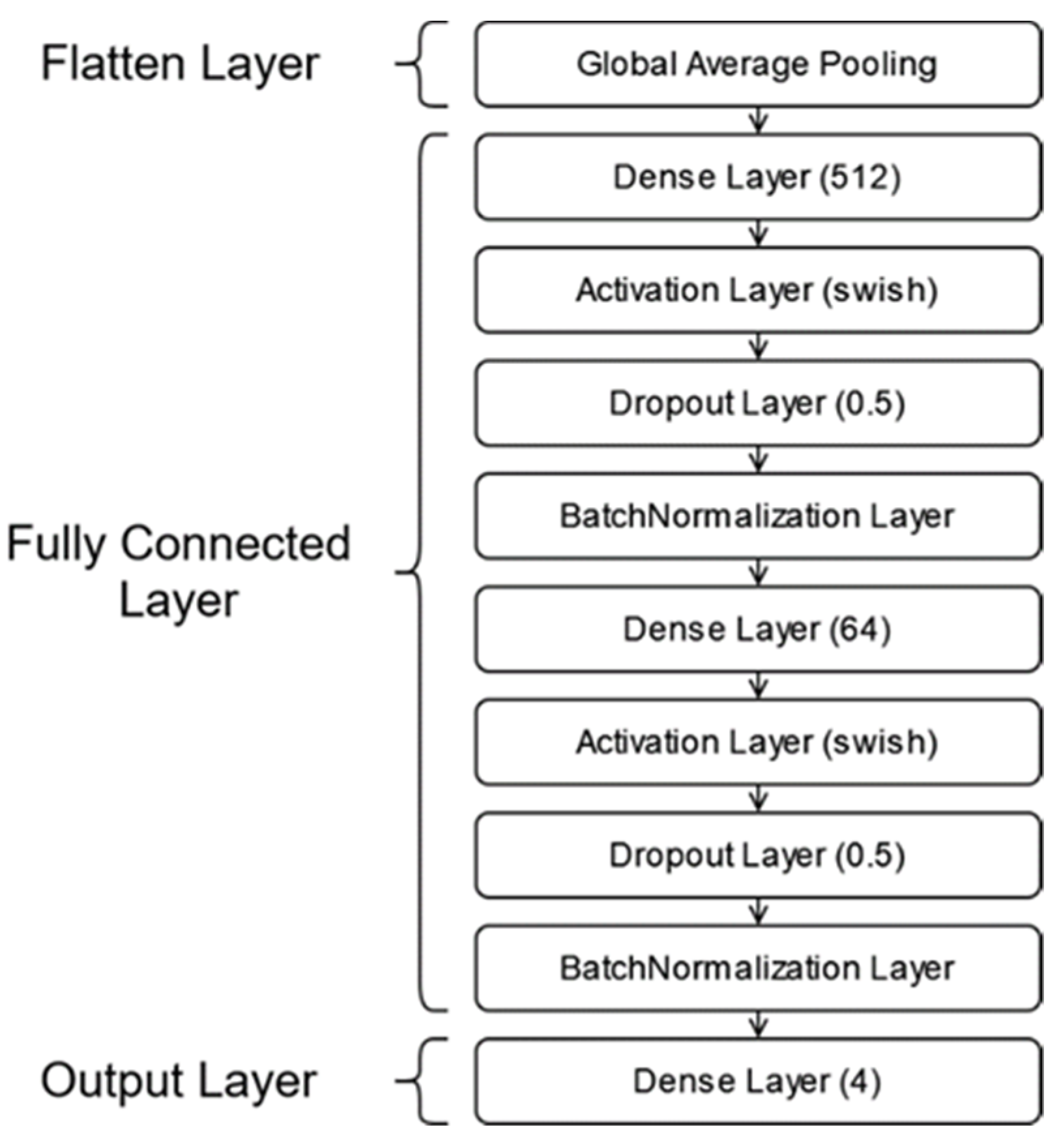
2.2.3. Deep Learning and CNN
2.2.4. Grad-CAM
2.2.5. Trained Details
2.2.6. Hardware and Software
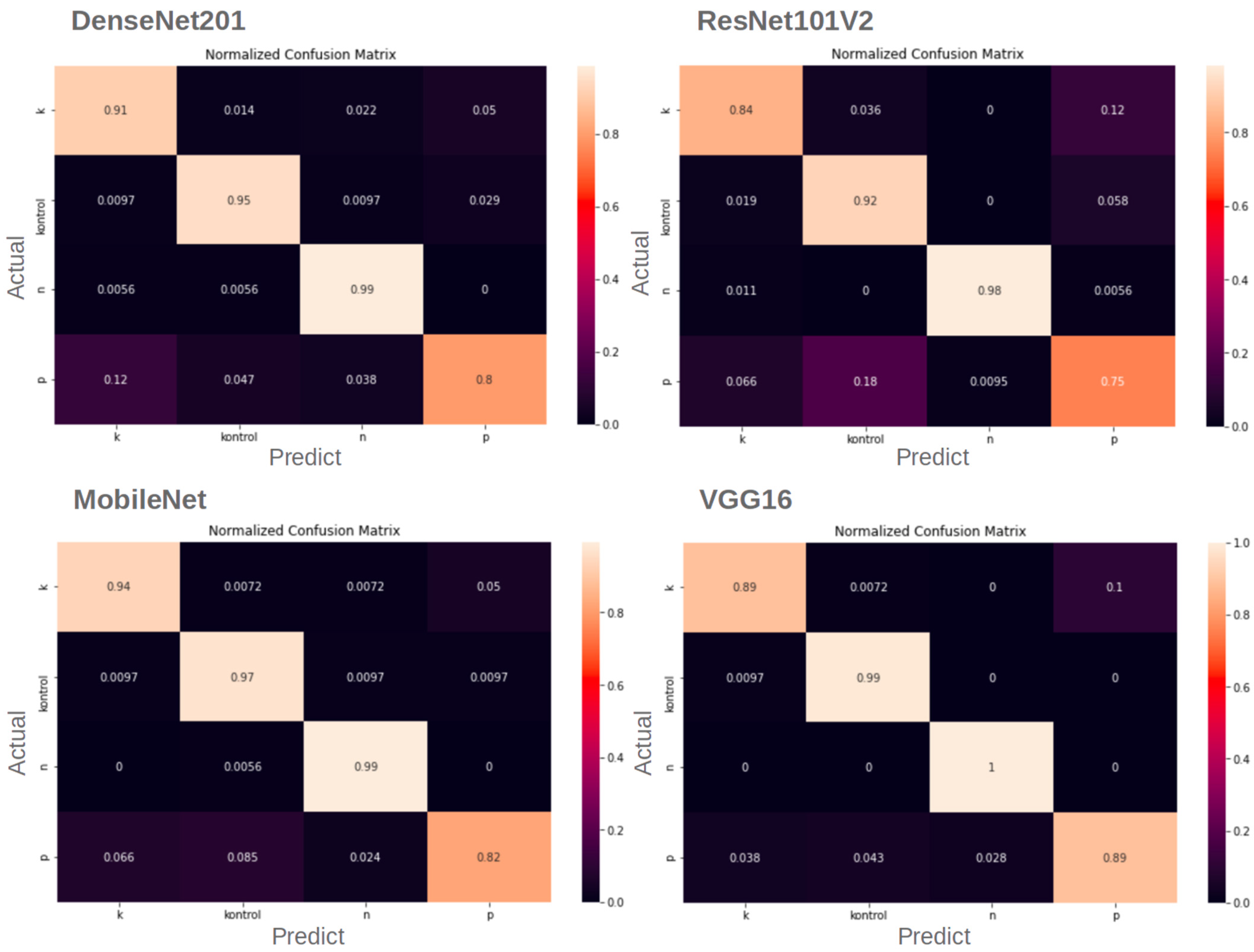
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial intelligence |
| Acc | Accuracy |
| Ca | Calcium |
| CNN | Convolutional neural network |
| K- | Potassium deficiency |
| K | Potassium |
| Mg | Magnesium |
| N- | Nitrogen deficiency |
| N | Nitrogen |
| P- | Phosphorous deficiency |
| P | Phosphorous |
| Pre | Precision |
| Rec | Recall |
| TP | True Positive |
| TN | True Negative |
| FP | False Positive |
| FN | False Negative |
References
- Kılavuz, E.; Erdem, I. Dünyada tarim 4.0 uygulamalari ve Türk tariminin dönüşümü. Soc. Sci. 2019, 14, 133–157. [Google Scholar] [CrossRef]
- Eryılmaz, G.A.; Kılıç, O. Türkiye’de Sürdürülebilir Tarım ve İyi Tarım Uygulamaları. KSÜ Tarım Ve Doğa Derg. 2018, 21, 624–631. [Google Scholar] [CrossRef]
- Kamyshova, G.; Osipov, A.; Gataullin, S.; Korchagin, S.; Ignar, S.; Gataullin, T.; Terekhova, N.; Suvorov, S. Artificial Neural Networks and Computer Vision’s-Based Phytoindication Systems for Variable Rate Irrigation Improving. IEEE Access 2022, 10, 8577–8589. [Google Scholar] [CrossRef]
- Azimi, S.; Kaur, T.; Gandhi, T.K. BAT Optimized CNN Model Identifies Water Stress in Chickpea Plant Shoot Images. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 8500–8506. [Google Scholar]
- Osipov, A.; Pleshakova, E.; Gataullin, S.; Korchagin, S.; Ivanov, M.; Finogeev, A.; Yadav, V. Deep Learning Method for Recognition and Classification of Images from Video Recorders in Difficult Weather Conditions. Sustainability 2022, 14, 2420. [Google Scholar] [CrossRef]
- Jung, J.; Maeda, M.; Chang, A.; Bhandari, M.; Ashapure, A.; Landivar-Bowles, J. The potential of remote sensing and artificial intelligence as tools to improve the resilience of agriculture production systems. Curr. Opin. Biotechnol. 2021, 70, 15–22. [Google Scholar] [CrossRef] [PubMed]
- Haq, M.A. CNN Based Automated Weed Detection System Using UAV Imagery. Comput. Syst. Sci. Eng. 2022, 42, 837–849. [Google Scholar] [CrossRef]
- Thenmozhi, K.; Reddy, U.S. Crop pest classification based on deep convolutional neural network and transfer learning. Comput. Electron. Agric. 2019, 164, 104906. [Google Scholar] [CrossRef]
- Osipov, A.; Shumaev, V.; Ekielski, A.; Gataullin, T.; Suvorov, S.; Mishurov, S.; Gataullin, S. Identification and Classification of Mechanical Damage During Continuous Harvesting of Root Crops Using Computer Vision Methods. IEEE Access 2022, 10, 28885–28894. [Google Scholar] [CrossRef]
- Korchagin, S.A.; Gataullin, S.T.; Osipov, A.V.; Smirnov, M.V.; Suvorov, S.V.; Serdechnyi, D.V.; Bublikov, K.V. Development of an Optimal Algorithm for Detecting Damaged and Diseased Potato Tubers Moving along a Conveyor Belt Using Computer Vision Systems. Agronomy 2021, 11, 1980. [Google Scholar] [CrossRef]
- Ayaşlıgil, T.E.; Çoşkun, M.C. Sürdürülebilir Tarımda Topraksız Tarım ve Hidroponik Sistemlerin Önemi. In Proceedings of the Akdeniz 7th International Congress on Applied Sciences, Mersin, Turkey, 30 March 2022; pp. 109–125. [Google Scholar]
- Gül, A. Topraksız Yetiştiricilikte Bitki Besleme. In Topraksız Tarım, Hasad Yayincilik: Istanbul, Turkey, 3rd ed.; 2019; pp. 69–74. [Google Scholar]
- Bhatt, D.; Patel, C.; Talsania, H.; Patel, J.; Vaghela, R.; Pandya, S.; Modi, K.; Ghayvat, H. CNN Variants for Computer Vision: History, Architecture, Application, Challenges and Future Scope. Electronics 2021, 10, 2470. [Google Scholar] [CrossRef]
- Yi, J.; Krusenbaum, L.; Unger, P.; Hüging, H.; Seidel, S.J.; Schaaf, G.; Gall, J. Deep Learning for Non-Invasive Diagnosis of Nutrient Deficiencies in Sugar Beet Using RGB Images. Sensors 2020, 20, 5893. [Google Scholar] [CrossRef] [PubMed]
- Wulandhari, L.A.; Gunawan, A.A.S.; Qurania, A.; Harsani, P.; Tarawan, T.F.; Hermawan, R.F. Plant Nutrient Deficiency Detection Using Deep Convolutional Neural Network. ICIC Express Lett. 2019, 13, 971–977. [Google Scholar] [CrossRef]
- Guerrero, R.; Renteros, B.; Castaneda, R.; Villanueva, A.; Belupu, I. Detection of Nutrient Deficiencies in Banana Plants Using Deep Learning. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICAACCA), Valparaíso, Chile, 22–26 March 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Sharma, M.; Nath, K.; Sharma, R.K.; Kumar, C.J.; Chaudhary, A. Ensemble Averaging of Transfer Learning Models for Identification of Nutritional Deficiency in Rice Plant. Electronics 2022, 11, 148. [Google Scholar] [CrossRef]
- Taha, M.F.; Abdalla, A.; ElMasry, G.; Gouda, M.; Zhou, L.; Zhao, N.; Liang, N.; Niu, Z.; Hassanein, A.; Al-Rejaie, S.; et al. Using Deep Convolutional Neural Network for Image-Based Diagnosis of Nutrient Deficiencies in Plants Grown in Aquaponics. Chemosensors 2022, 10, 45. [Google Scholar] [CrossRef]
- Kusanur, V.; Chakravarthi, V.S. Using Transfer Learning for Nutrient Deficiency Prediction and Classification in Tomato Plant. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 45–54. [Google Scholar] [CrossRef]
- Rahadiyan, D.; Hartati, S.; Wahyono; Nugroho, A.P. Design of an Intelligent Hydroponics System to Identify Macronutrient Deficiencies in Chili. Int. J. Adv. Comput. Sci. Appl. 2022, 13, 137–145. [Google Scholar] [CrossRef]
- Islam, M.; Hatou, K.; Aihara, T.; Seno, S.; Kirino, S.; Okamoto, S. Performance prediction of tomato leaf disease by a series of parallel convolutional neural networks. SSRN Electron. J. 2022, 2, 100054. [Google Scholar] [CrossRef]
- Guo-Feng, Y.; Yong, Y.; Zi-Kang, H.; Xin-Yu, Z.; Yong, H. A rapid, low-cost deep learning system to classify strawberry disease based on cloud service. J. Integr. Agric. 2022, 21, 460–473. [Google Scholar] [CrossRef]
- Ngugi, L.C.; Abdelwahab, M.; Abo-Zahhad, M. A new approach to learning and recognizing leaf diseases from individual lesions using convolutional neural networks. Inf. Process. Agric. 2023, 10, 11–27. [Google Scholar] [CrossRef]
- Azimi, S.; Kaur, T.; Gandhi, T.K. A deep learning approach to measure stress level in plants due to Nitrogen deficiency. Measurement 2020, 173, 108650. [Google Scholar] [CrossRef]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of deep learning: Concepts, CNN architectures, challenges, applications, future directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef] [PubMed]
- Shrestha, A.; Mahmood, A. Review of Deep Learning Algorithms and Architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. A review of the use of convolutional neural networks in agriculture. J. Agric. Sci. 2018, 156, 312–322. [Google Scholar] [CrossRef]
- Zhuang, F.; Qi, Z.; Duan, K.; Xi, D.; Zhu, Y.; Zhu, H.; Xiong, H.; He, Q. A Comprehensive Survey on Transfer Learning. Proc. IEEE 2021, 109, 43–76. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Malounas, I.; Mylonas, N.; Kasimati, A.; Fountas, S. Using EfficientNet and transfer learning for image-based diagnosis of nutrient deficiencies. Comput. Electron. Agric. 2022, 196, 106868. [Google Scholar] [CrossRef]
- Hassan, S.M.; Maji, A.K.; Jasiński, M.; Leonowicz, Z.; Jasińska, E. Identification of Plant-Leaf Diseases Using CNN and Transfer-Learning Approach. Electronics 2021, 10, 1388. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected Convolutional Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | N | P | K | Ca | Mg | Fe | Mn | Zn | B | Cu | Mo |
| Dosage (mg/L) | 180 | 50 | 210 | 180 | 50 | 4 | 0.5 | 0.1 | 0.5 | 0.1 | 0.05 |
| Status of Plant | Number of Photos |
|---|---|
| Control | 345 |
| N- | 456 |
| P- | 544 |
| K- | 412 |
| Total | 1757 |
| Number of Photos | |
|---|---|
| Train Set | 1126 |
| Test Set | 631 |
| Training Set | |||
|---|---|---|---|
| Unbalanced Training Set | Balanced Training Set | ||
| Status of Plant | Control | 242 | 2500 |
| N- | 278 | 2500 | |
| P- | 333 | 2500 | |
| K- | 273 | 2500 | |
| Total | 1126 | 10,000 | |
| Predict | |||
|---|---|---|---|
| Positive (Class_1) | Negative (Class_2) | ||
| Actual | Positive (Class _1) | True Positive (TP) | False Negative (FN) |
| Negative (Class _2) | False Positive (FP) | True Negative (TN) | |
| Before Fine-Tuning | ||||||
| Loss | Acc (%) | Pre (%) | Rec (%) | Epoch | Time (s/epoch) | |
| DenseNet201 | 0.117 | 95.92 | 96.23 | 95.60 | 25 | 62 |
| Resnet101V2 | 0.124 | 95.87 | 96.20 | 95.54 | 17 | 66 |
| MobileNet | 0.090 | 96.86 | 97.22 | 96.51 | 16 | 30 |
| VGG16 | 0.293 | 89.11 | 90.42 | 87.91 | 34 | 53 |
| After Fine-Tuning | ||||||
| DenseNet201 | 0.048 | 98.49 | 98.73 | 98.38 | 10 | 66 |
| Resnet101V2 | 0.024 | 99.55 | 99.62 | 99.46 | 10 | 82 |
| MobileNet | 0.032 | 99.12 | 99.22 | 99.06 | 10 | 31 |
| VGG16 | 0.022 | 99.89 | 99.91 | 99.88 | 10 | 81 |
| Before Fine-Tuning | ||||
| Loss | Acc (%) | Pre (%) | Rec (%) | |
| DenseNet201 | 0.288 | 89.54 | 89.87 | 88.59 |
| Resnet101V2 | 0.561 | 83.68 | 84.59 | 83.52 |
| MobileNet | 0.408 | 85.26 | 86.71 | 84.79 |
| VGG16 | 0.601 | 79.71 | 82.06 | 78.29 |
| After Fine-Tuning | ||||
| DenseNet201 | 0.303 | 90.17 | 90.66 | 89.22 |
| Resnet101V2 | 0.435 | 86.37 | 87.46 | 86.21 |
| MobileNet | 0.232 | 92.08 | 92.32 | 91.44 |
| VGG16 | 0.185 | 93.82 | 94.36 | 92.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gul, Z.; Bora, S. Exploiting Pre-Trained Convolutional Neural Networks for the Detection of Nutrient Deficiencies in Hydroponic Basil. Sensors 2023, 23, 5407. https://doi.org/10.3390/s23125407
Gul Z, Bora S. Exploiting Pre-Trained Convolutional Neural Networks for the Detection of Nutrient Deficiencies in Hydroponic Basil. Sensors. 2023; 23(12):5407. https://doi.org/10.3390/s23125407
Chicago/Turabian StyleGul, Zeki, and Sebnem Bora. 2023. "Exploiting Pre-Trained Convolutional Neural Networks for the Detection of Nutrient Deficiencies in Hydroponic Basil" Sensors 23, no. 12: 5407. https://doi.org/10.3390/s23125407
APA StyleGul, Z., & Bora, S. (2023). Exploiting Pre-Trained Convolutional Neural Networks for the Detection of Nutrient Deficiencies in Hydroponic Basil. Sensors, 23(12), 5407. https://doi.org/10.3390/s23125407