
3D Road Lane Classification with Improved Texture Patterns and Optimized Deep Classifier


 and
and
Abstract
1. Introduction
- The primary goal of this work is to propose a 3D road lane classification with improved texture patterns and an optimized deep classifier that includes Phases I (road or non-road classification) and II (lane or non-lane classification);
- Initially, features such as the local texton XOR pattern (LTXOR), local Gabor binary pattern histogram sequence (LGBPHS), and median ternary pattern (MTP) are determined. These features are further classified using the bidirectional gated recurrent unit (BI-GRU), which determines whether there is a lane or not under various environmental conditions;
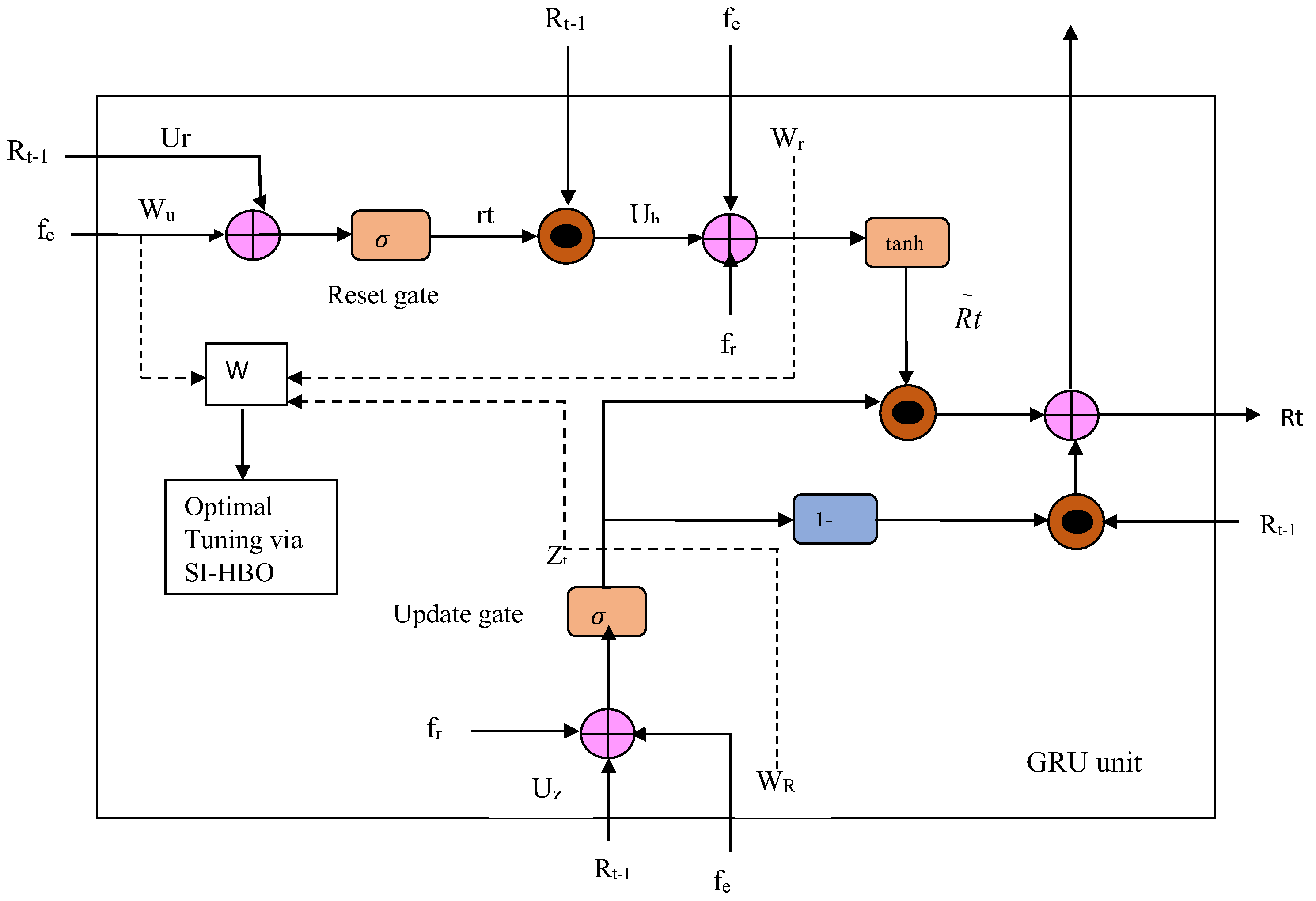
- To improve its performance with the targets of lowering the complexity and minimizing the error, the weights in the BI-GRU are optimized by self-improved honey badger optimization (SI-HBO). Thus, the lane line problem in multi-lane scenes is efficiently recognized, and once the vehicles change lanes, the current lane scene is easily identified.
2. Literature Review
3. Description of Proposed Technique
- At first, the proposed LTXOR-, LGBPHS-, and MTP-based features are extracted;
- Then, road or non-road is classified using the BI-GRU model;
- Further, these extracted features are provided for the optimal BI-GRU for lane or non-lane classification;
- For optimizing the weights in the BI-GRU, SI-HBO is deployed in this work.
4. Extraction of Proposed Features
4.1. Proposed LTXOR Features
4.2. MTP Features
4.3. LGBPHS Features
5. Two-Phase Classification Using BI-GRU + SI-HBO
5.1. Two-Phase Classification
- In Phase I, the features () are subjected to BI-GRU for classification as road or non-road;
- In Phase II, the same features are then subjected to the optimized BI-GRU, which trains with the SI-HBO to determine whether they are lane or non-lane.
5.2. BI-GRU
5.3. SI-HBO Model for Tuning Bi-GRU
| Algorithm 1: Pseudocode of SI-HBO algorithm |
| Initialize the population with a random position |
| Fitness evaluation |
| Save best position |
| While t tmax do |
| Update the decreasing factor using Equation (24) |
| For do |
| compute the solution’s intensity using Equation (25) |
| If1 then |
| update as per Equation (26), |
| else |
| update the solution as shown in Equation (32), |
| End if |
| Calculate novel position and allocate it to . |
| If , & if , & = , |
| execute arithmetic cross over |
| End if |
6. Results and Discussion
6.1. Simulation Setup
6.2. Performance Analysis
6.3. Statistical Analysis on Accuracy
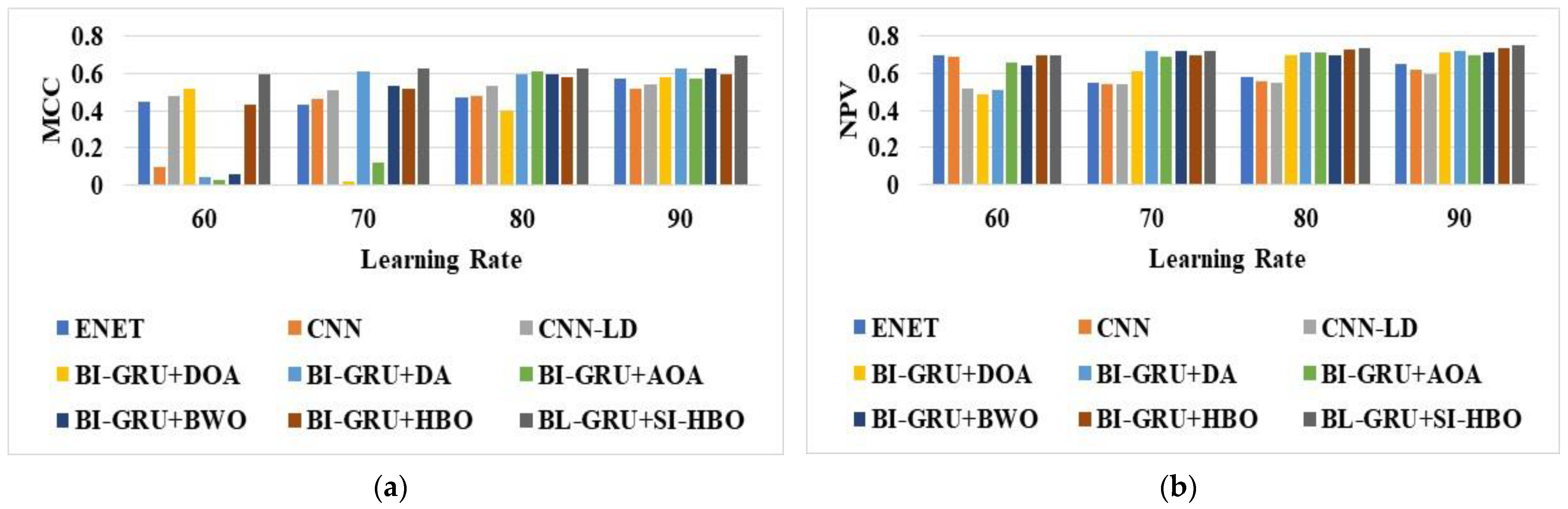
6.4. Comparative Analysis
6.5. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviation | Description |
| AOA | Arithmetic Optimization Algorithm |
| BWO | Black Widow Optimization |
| BI-GRU | Bidirectional Gated Recurrent Unit |
| CNN | Convolutional Neural Network |
| CAE | Convolution Auto-Encoder |
| DL | Deep Learning |
| DOA | Dingo Optimization |
| DA | Dragonfly Algorithm |
| DBN | Deep Belief Network |
| HBO | Honey Badger Optimization |
| HT | Hough Transform |
| LCR | Lane-Changing Recognition |
| LSTM | Long Short-Term Memory |
| LGBPHS | Local Gabor Binary Pattern Histogram Sequence |
| LTXOR | Local Texton Xor Pattern |
| LR | Learning Rate |
| MTP | Median Ternary Pattern |
| MLS | Mobile Laser Scanning |
| MCC | Matthews Correlation Coefficient |
| NPV | Negative Predictive Value |
| ROI | Region Of Interest |
| RNN | Recurrent Neural Network |
| RF | Random Forest |
| SVM | Support Vector Machine |
| SI | Self-Improved |
References
- Dewangan, D.K.; Sahu, S.P. Driving Behavior Analysis of Intelligent Vehicle System for Lane Detection Using Vision-Sensor. IEEE Sens. J. 2021, 21, 6367–6375. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Lian, F.-L. System Integration of Sensor-Fusion Localization Tasks Using Vision-Based Driving Lane Detection and Road-Marker Recognition. IEEE Syst. J. 2020, 14, 4523–4534. [Google Scholar] [CrossRef]
- Feng, Z.; Li, M.; Stolz, M.; Kunert, M.; Wiesbeck, W. Lane Detection with a High-Resolution Automotive Radar by Introducing a New Type of Road Marking. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2430–2447. [Google Scholar] [CrossRef]
- Lin, C.; Guo, Y.; Li, W.; Liu, H.; Wu, D. An Automatic Lane Marking Detection Method with Low-Density Roadside LiDAR Data. IEEE Sens. J. 2021, 21, 10029–10038. [Google Scholar] [CrossRef]
- Lu, P.; Xu, S.; Peng, H. Graph-Embedded Lane Detection. IEEE Trans. Image Process. 2021, 30, 2977–2988. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, Z.; Ma, D.; Xue, J.-H.; Liao, Q. Ripple-GAN: Lane Line Detection with Ripple Lane Line Detection Network and Wasserstein GAN. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1532–1542. [Google Scholar] [CrossRef]
- Lopez-Guede, J.M.; Izquierdo, A.; Estevez, J.; Graña, M. Active learning for road lane landmark inventory with V-ELM in highly uncontrolled image capture conditions. Neurocomputing 2021, 438, 259–269. [Google Scholar] [CrossRef]
- Arya, D.; Maeda, H.; Ghosh, S.K.; Toshniwal, D.; Mraz, A.; Kashiyama, T.; Sekimoto, Y. Deep learning-based road damage detection and classification for multiple countries. Autom. Constr. 2021, 132, 103935. [Google Scholar] [CrossRef]
- Fang, J.; Qu, B.; Yuan, Y. Distribution equalization learning mechanism for road crack detection. Neurocomputing 2021, 424, 193–204. [Google Scholar] [CrossRef]
- Grinias, I.; Panagiotakis, C.; Tziritas, G. MRF-based segmentation and unsupervised classification for building and road detection in peri-urban areas of high-resolution satellite images. ISPRS J. Photogramm. Remote Sens. 2016, 122, 145–166. [Google Scholar] [CrossRef]
- Xu, F.; Hu, B.; Chen, L.; Wang, H.; Xia, Q.; Sehdev, P.; Ren, M. An illumination robust road detection method based on color names and geometric information. Cogn. Syst. Res. 2018, 52, 240–250. [Google Scholar] [CrossRef]
- Jayaprakash, A.; KeziSelvaVijila, C. Feature selection using Ant Colony Optimization (ACO) and Road Sign Detection and Recognition (RSDR) system. Cogn. Syst. Res. 2019, 58, 123–133. [Google Scholar] [CrossRef]
- Geng, L.; Sun, J.; Xiao, Z.; Zhang, F.; Wu, J. Combining CNN and MRF for road detection. Comput. Electr. Eng. 2018, 70, 895–903. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, W.; Dobaie, A.M.; Zhuang, Y. Autonomous road detection and modeling for UGVs using vision-laser data fusion. Neurocomputing 2018, 275, 2752–2761. [Google Scholar] [CrossRef]
- Li, Y.; Ding, W.; Zhang, X.; Ju, Z. Road detection algorithm for Autonomous Navigation Systems based on dark channel prior and vanishing point in complex road scenes. Robot. Auton. Syst. 2016, 85, 1–11. [Google Scholar] [CrossRef]
- Ochman, M. Hybrid approach to road detection in front of the vehicle. IFAC-Pap. 2019, 52, 245–250. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, R.; Dai, B.; Fang, Y.; Liu, D.; Wu, T. Hybrid conditional random field based camera-LIDAR fusion for road detection. Inf. Sci. 2018, 432, 543–558. [Google Scholar] [CrossRef]
- Zhu, M.; Liu, Y.; Zhuang, Y.; Hu, H. Visual Campus Road Detection for an UGV using Fast Scene Segmentation and Rapid Vanishing Point Estimation. IFAC Proc. Vol. 2014, 47, 11898–11903. [Google Scholar] [CrossRef]
- Satti, S.K.; Devi, K.S.; Dhar, P.; Srinivasan, P. A machine learning approach for detecting and tracking road boundary lanes. ICT Express 2021, 7, 99–103. [Google Scholar] [CrossRef]
- Haris, M.; Hou, J.; Wang, X. Multi-scale spatial convolution algorithm for lane line detection and lane offset estimation in complex road conditions. Signal Process. Image Commun. 2021, 99, 116413. [Google Scholar] [CrossRef]
- Almeida, T.; Lourenço, B.; Santos, V. Road detection based on simultaneous deep learning approaches. Robot. Auton. Syst. 2020, 133, 103605. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, Z.; Wu, X.; Qi, L.; Han, Y. Recognition of lane-changing behaviour with machine learning methods at freeway off-ramps. Phys. A Stat. Mech. Its Appl. 2021, 567, 125691. [Google Scholar] [CrossRef]
- Perng, J.W.; Hsu, Y.W.; Yang, Y.Z.; Chen, C.Y.; Yin, T.K. Development of an embedded road boundary detection system based on deep learning. Image Vis. Comput. 2020, 100, 103935. [Google Scholar] [CrossRef]
- Wang, H.F.; Wang, Y.F.; Zhao, X.; Wang, G.P.; Huang, H.; Zhang, J. Lane Detection of Curving Road for Structural Highway with Straight-Curve Model on Vision. IEEE Trans. Veh. Technol. 2019, 68, 5321–5330. [Google Scholar] [CrossRef]
- Luo, S.; Zhang, X.; Hu, J.; Xu, J. Multiple Lane Detection via Combining Complementary Structural Constraints. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7597–7606. [Google Scholar] [CrossRef]
- Ye, C.; Zhao, H.; Ma, L.; Jiang, H.; Li, H.; Wang, R.; Chapman, M.A.; Junior, J.M.; Li, J. Robust Lane Extraction from MLS Point Clouds Towards HD Maps Especially in Curve Road. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1505–1518. [Google Scholar] [CrossRef]
- Bala, A.; Kaur, T. Local texton XOR patterns: A new feature descriptor for content-based image retrieval. Eng. Sci. Technol. Int. J. 2016, 19, 101–112. [Google Scholar] [CrossRef]
- Khan, A.; Bashar, F.; Ahmed, F.; Kabir, H. Median ternary pattern (MTP) for face recognition. In Proceedings of the International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013. [Google Scholar] [CrossRef]
- Zhang, W.; Shan, S.; Gao, W.; Chen, X.; Zhang, H. Local Gabor binary pattern histogram sequence (LGBPHS): A novel non-statistical model for face representation and recognition. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005. [Google Scholar]
- Li, X.; Ma, X.; Xiao, F.; Xiao, C.; Wang, F.; Zhang, S. Time-series production forecasting method based on the integration of Bidirectional Gated Recurrent Unit (Bi-GRU) network and Sparrow Search Algorithm (SSA). J. Pet. Sci. Eng. 2022, 208, 109309. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2022, 192, 84–110. [Google Scholar] [CrossRef]
- Dehghani, M.; Trojovský, P. Teamwork Optimization Algorithm: A New Optimization Approach for Function Minimization/Maximization. Sensors 2021, 21, 4567. [Google Scholar] [CrossRef]
- Dhawan, S.; Gupta, R.; Rana, A.; Sharma, S. Various Swarm Optimization Algorithms: Review, Chal-lenges, and Opportunities. Soft Comput. Intell. Syst. 2021, 2021, 291–301. [Google Scholar]
- Abualigah, L. Group search optimizer: A nature-inspired meta-heuristic optimization algorithm with its results, variants, and applications. Neural Comput. Appl. 2021, 33, 2949–2972. [Google Scholar] [CrossRef]
- Li, J.; Jiang, F.; Yang, J.; Kong, B.; Gogate, M.; Dashtipour, K.; Hussain, A. Lane-deeplab: Lane semantic segmentation in automatic driving scenarios for high-definition maps. Neurocomputing 2021, 465, 15–25. [Google Scholar] [CrossRef]
- Jamali, A.; Mallipeddi, R.; Salehpour, M.; Bagheri, A. Multi-objective differential evolution algorithm with fuzzy inference-based adaptive mutation factor for Pareto optimum design of suspension system. Swarm Evol. Comput. 2020, 54, 100666. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Sultan, H.M.; Do, T.D.; Kamel, O.M.; Mossa, M.A. Coyote Optimization Algorithm for Parameters Estimation of Various Models of Solar Cells and PV Modules. IEEE Access 2020, 8, 111102–111140. [Google Scholar] [CrossRef]
- Doumari, S.A.; Hadi, G.; Mohammad, D.; Om, P.K. Ring toss game-based optimization algo-rithm for solving various optimization problems. Int. J. Intell. Eng. Syst. 2021, 14, 545–554. [Google Scholar]
- Ginidi, A.R.; Shaheen, A.M.; El-Sehiemy, R.A.; Elattar, E. Supply demand optimization algorithm for parameter extraction of various solar cell models. Energy Rep. 2021, 7, 5772–5794. [Google Scholar] [CrossRef]
- Meraihi, Y.; Gabis, A.B.; Mirjalili, S.; Ramdane-Cherif, A. Grasshopper optimization algorithm: Theory, variants, and applications. IEEE Access 2021, 9, 50001–50024. [Google Scholar] [CrossRef]
- Garnett, N.; Cohen, R.; Pe’Er, T.; Lahav, R.; Levi, D. 3D-LaneNet: End-to-End 3D Multiple Lane Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Adopted Methods | Features | Challenges |
|---|---|---|---|
| Satish et al. [19] | CNN | The method is used to extract the edge features High precision | Needs consideration of the stability and computational time analysis. |
| Malik et al. [20] | CNN | Less loss High recall | Needs consideration of forward collision warning policy. |
| Tiago et al. [21] | ENet-based model | High reliability High scalability | A special network is required for fusing purposes. |
| Ting et al. [22] | LCR | High detection rate Higher accuracy | Requires the use of more datasets. |
| Jau et al. [23] | Particle filter | Less error High accuracy | A collision-avoiding model needs to be involved. |
| Wang et al. [24] | Improved Hough transform | High accuracy Minimal time utilization | Cost analysis should be made. |
| Luo et al. [25] | Hough transform | Fewer false alarms High accuracy | Needs more consideration of time usage. |
| Ye et al. [26] | Gaussian distribution | High precision High F1-score | Spiral curves of the road are not considered. |
| BI-GRU + SI-HBO | ENet [21] | CNN-LD [19] | LSTM | CNN [20] | RNN | DBN | SVM | RF | |
|---|---|---|---|---|---|---|---|---|---|
| Sensitivity | 0.910 | 0.264 | 0.275 | 0.037 | 0.226 | 0.245 | 0.075 | 0.528 | 0.094 |
| Accuracy | 0.928 | 0.631 | 0.658 | 0.552 | 0.596 | 0.640 | 0.56 | 0.552 | 0.552 |
| NPV | 0.945 | 0.928 | 0.754 | 0.905 | 0.918 | 0.913 | 0.933 | 0.573 | 0.908 |
| Specificity | 0.945 | 0.930 | 0.983 | 0.725 | 0.918 | 0.903 | 0.903 | 0.573 | 0.910 |
| F1-Score | 0.928 | 0.465 | 0.492 | 0.072 | 0.342 | 0.388 | 0.137 | 0.437 | 0.138 |
| FNR | 0.089 | 0.735 | 0.739 | 0.962 | 0.773 | 0.754 | 0.924 | 0.471 | 0.905 |
| Precision | 0.946 | 0.823 | 0.723 | 0.915 | 0.705 | 0.928 | 0.887 | 0.518 | 0.625 |
| FPR | 0.054 | 0.079 | 0.945 | 0.275 | 0.081 | 0.163 | 0.163 | 0.426 | 0.091 |
| MCC | 0.855 | 0.301 | 0.678 | 0.143 | 0.202 | 0.347 | 0.143 | 0.101 | 0.088 |
| FDR | 0.053 | 0.176 | 0.156 | 0.092 | 0.294 | 0.071 | 0.286 | 0.481 | 0.375 |
| Metrics | Standard Deviation | Worst | Variance | Mean | Best |
|---|---|---|---|---|---|
| BI-GRU + DOA | 0.108 | 0.580 | 0.011 | 0.655 | 0.816 |
| BI-GRU + DA | 0.108 | 0.580 | 0.011 | 0.655 | 0.815 |
| BI-GRU + AOA | 0.173 | 0.407 | 0.030 | 0.622 | 0.833 |
| BI-GRU + BWO | 0.088 | 0.647 | 0.007 | 0.767 | 0.855 |
| BI-GRU + HBO | 0.047 | 0.722 | 0.002 | 0.775 | 0.829 |
| BI-GRU + SI-HBO | 0.051 | 0.815 | 0.002 | 0.868 | 0.928 |
| Metrics | Proposed Model | Proposed Model with Conventional LTXOR | Proposed Model without Feature Extraction |
|---|---|---|---|
| Sensitivity | 0.730 | 0.823 | 0.678 |
| Accuracy | 0.912 | 0.763 | 0.843 |
| FPR | 0.067 | 0.476 | 0.225 |
| Specificity | 0.932 | 0.523 | 0.733 |
| Precision | 0.919 | 0.679 | 0.755 |
| FNR | 0.269 | 0.172 | 0.321 |
| F1-Score | 0.814 | 0.809 | 0.808 |
| FDR | 0.081 | 0.320 | 0.121 |
| MCC | 0.674 | 0.597 | 0.721 |
| NPV | 0.902 | 0.523 | 0.245 |
| Metrics | BI-GRU + SI-HBO | BI-GRU + SI-HBO with Conventional LTXOR | BI-GRU + SI-HBO without Feature Extraction | Proposed Model without Optimization |
|---|---|---|---|---|
| Sensitivity | 0.910 | 0.893 | 0.853 | 0.793 |
| Accuracy | 0.928 | 0.771 | 0.815 | 0.719 |
| FPR | 0.0540 | 0.464 | 0.344 | 0.516 |
| Specificity | 0.945 | 0.535 | 0.655 | 0.483 |
| Precision | 0.946 | 0.690 | 0.716 | 0.619 |
| FNR | 0.089 | 0.124 | 0.142 | 0.216 |
| F1-Score | 0.928 | 0.816 | 0.834 | 0.764 |
| MCC | 0.855 | 0.608 | 0.685 | 0.54 |
| FDR | 0.053 | 0.309 | 0.283 | 0.381 |
| NPV | 0.945 | 0.535 | 0.655 | 0.484 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janakiraman, B.; Shanmugam, S.; Pérez de Prado, R.; Wozniak, M. 3D Road Lane Classification with Improved Texture Patterns and Optimized Deep Classifier. Sensors 2023, 23, 5358. https://doi.org/10.3390/s23115358
Janakiraman B, Shanmugam S, Pérez de Prado R, Wozniak M. 3D Road Lane Classification with Improved Texture Patterns and Optimized Deep Classifier. Sensors. 2023; 23(11):5358. https://doi.org/10.3390/s23115358
Chicago/Turabian StyleJanakiraman, Bhavithra, Sathiyapriya Shanmugam, Rocío Pérez de Prado, and Marcin Wozniak. 2023. "3D Road Lane Classification with Improved Texture Patterns and Optimized Deep Classifier" Sensors 23, no. 11: 5358. https://doi.org/10.3390/s23115358
APA StyleJanakiraman, B., Shanmugam, S., Pérez de Prado, R., & Wozniak, M. (2023). 3D Road Lane Classification with Improved Texture Patterns and Optimized Deep Classifier. Sensors, 23(11), 5358. https://doi.org/10.3390/s23115358