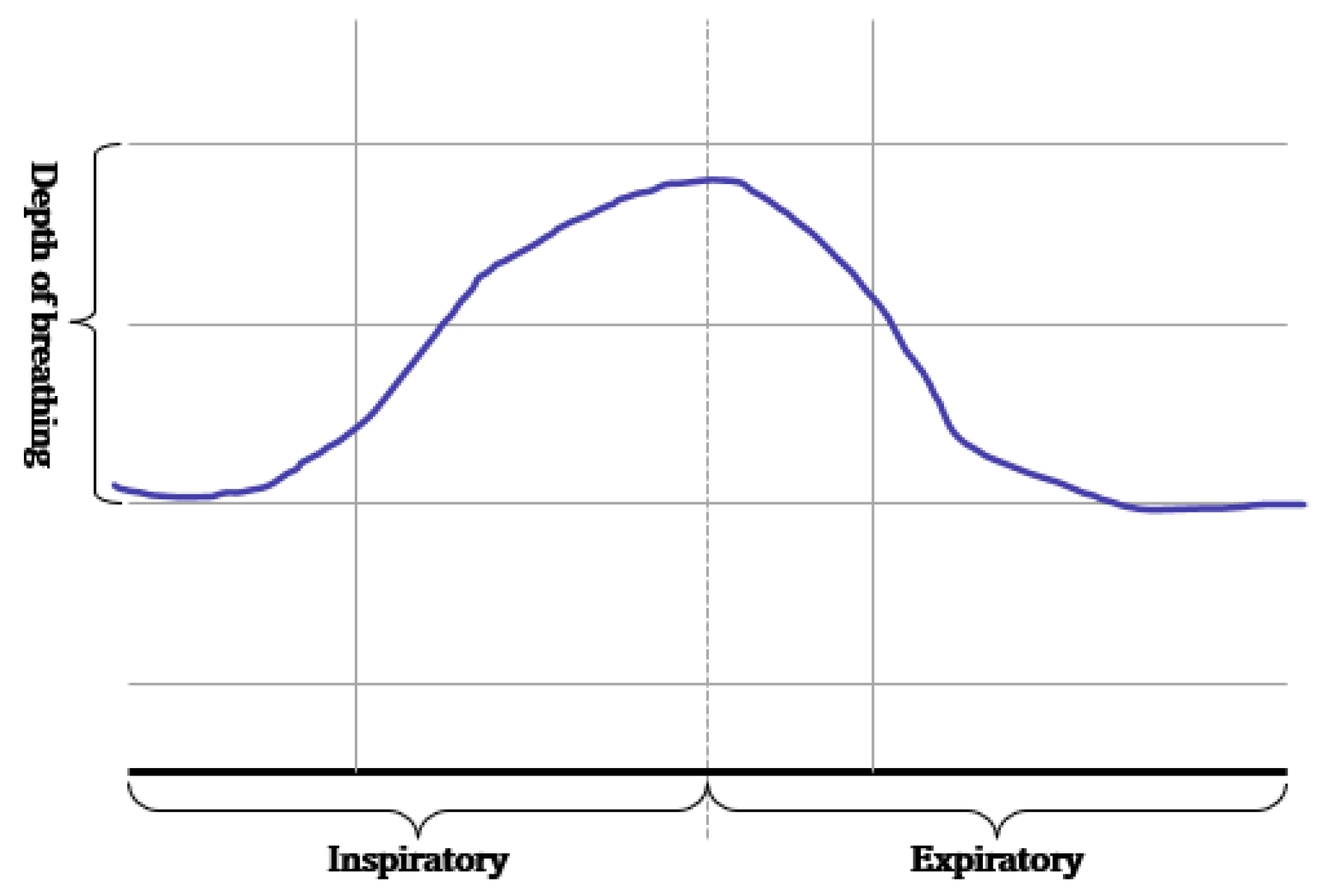
Figure 1.
Signals generated according to inhalation, exhalation, and the depth of breathing.
Figure 1.
Signals generated according to inhalation, exhalation, and the depth of breathing.
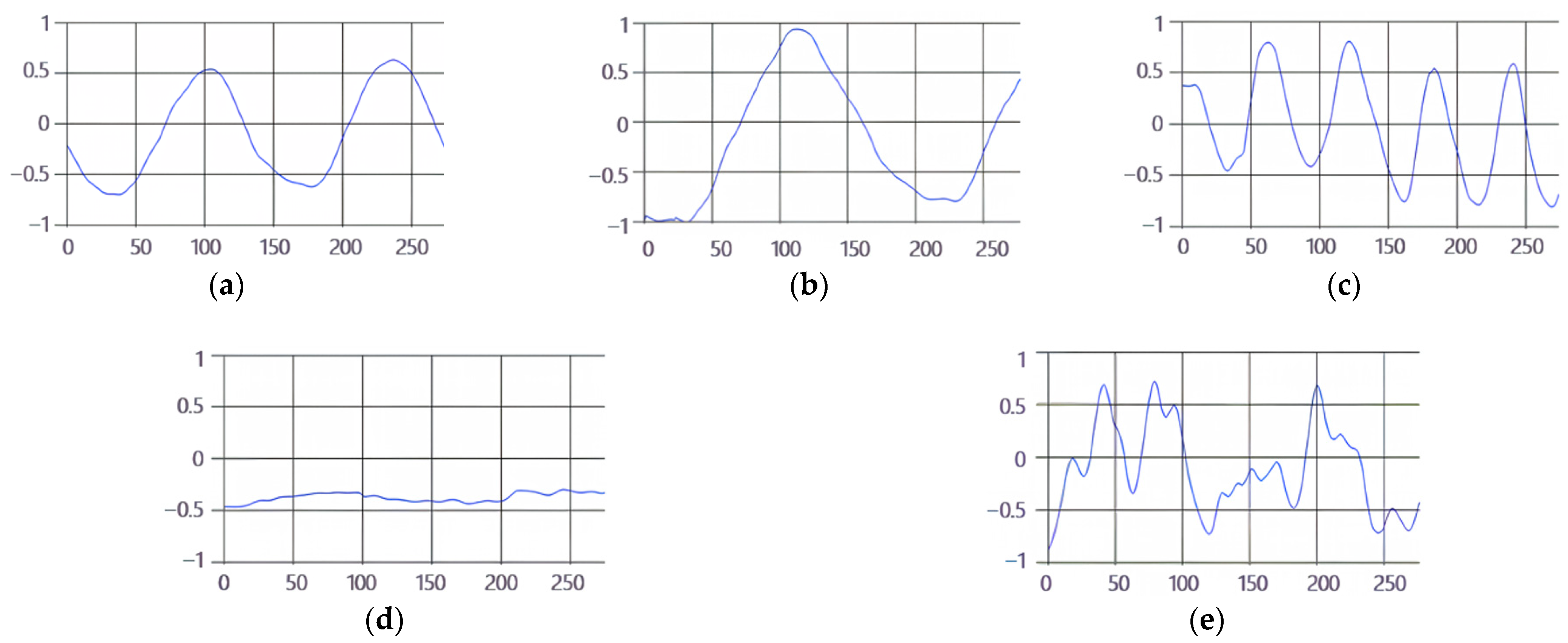
Figure 2.
Types of respiration measured by the mmWave sensor: (a) eupnea, (b) bradypnea, (c) tachypnea, (d) apnea, (e) movement.
Figure 2.
Types of respiration measured by the mmWave sensor: (a) eupnea, (b) bradypnea, (c) tachypnea, (d) apnea, (e) movement.
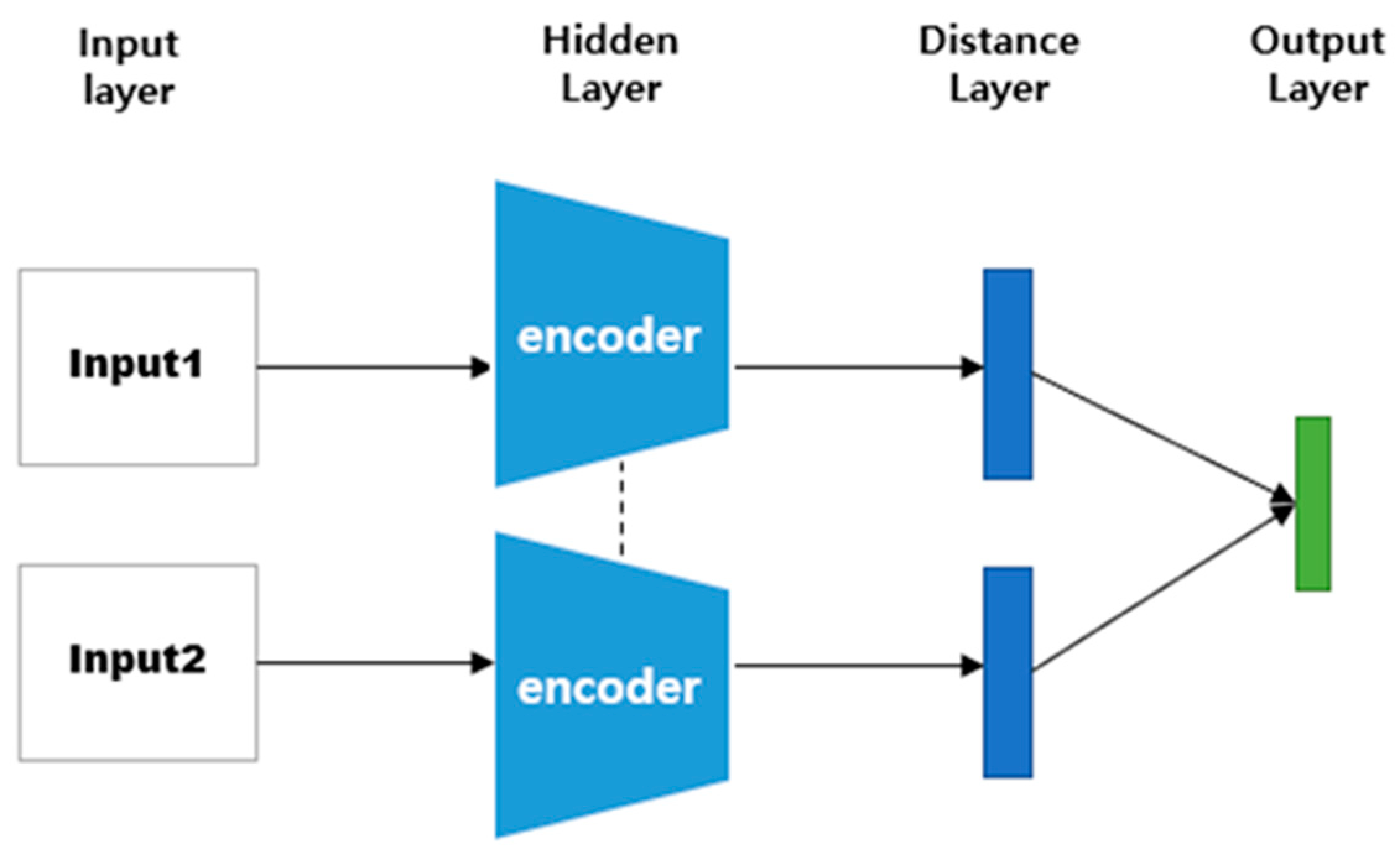
Figure 3.
SNN architecture.
Figure 3.
SNN architecture.
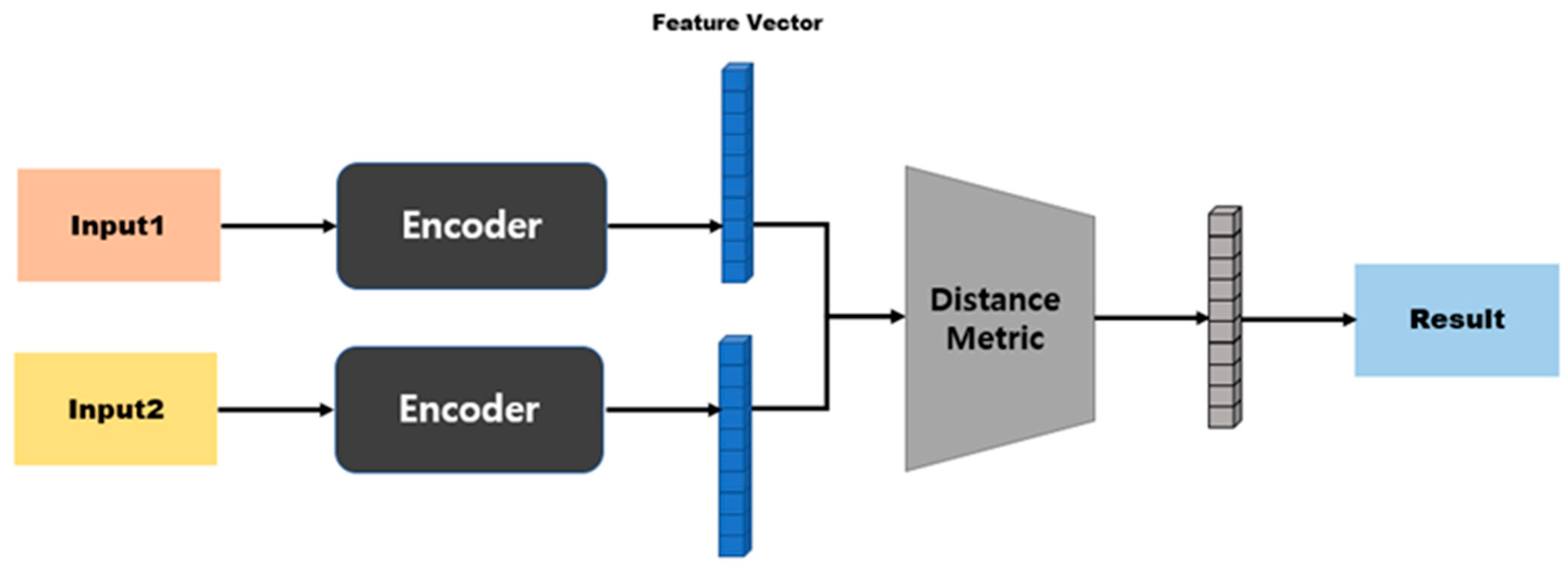
Figure 4.
Model structure based on distance metrics.
Figure 4.
Model structure based on distance metrics.
Figure 5.
Model structure based on similarity metrics.
Figure 5.
Model structure based on similarity metrics.
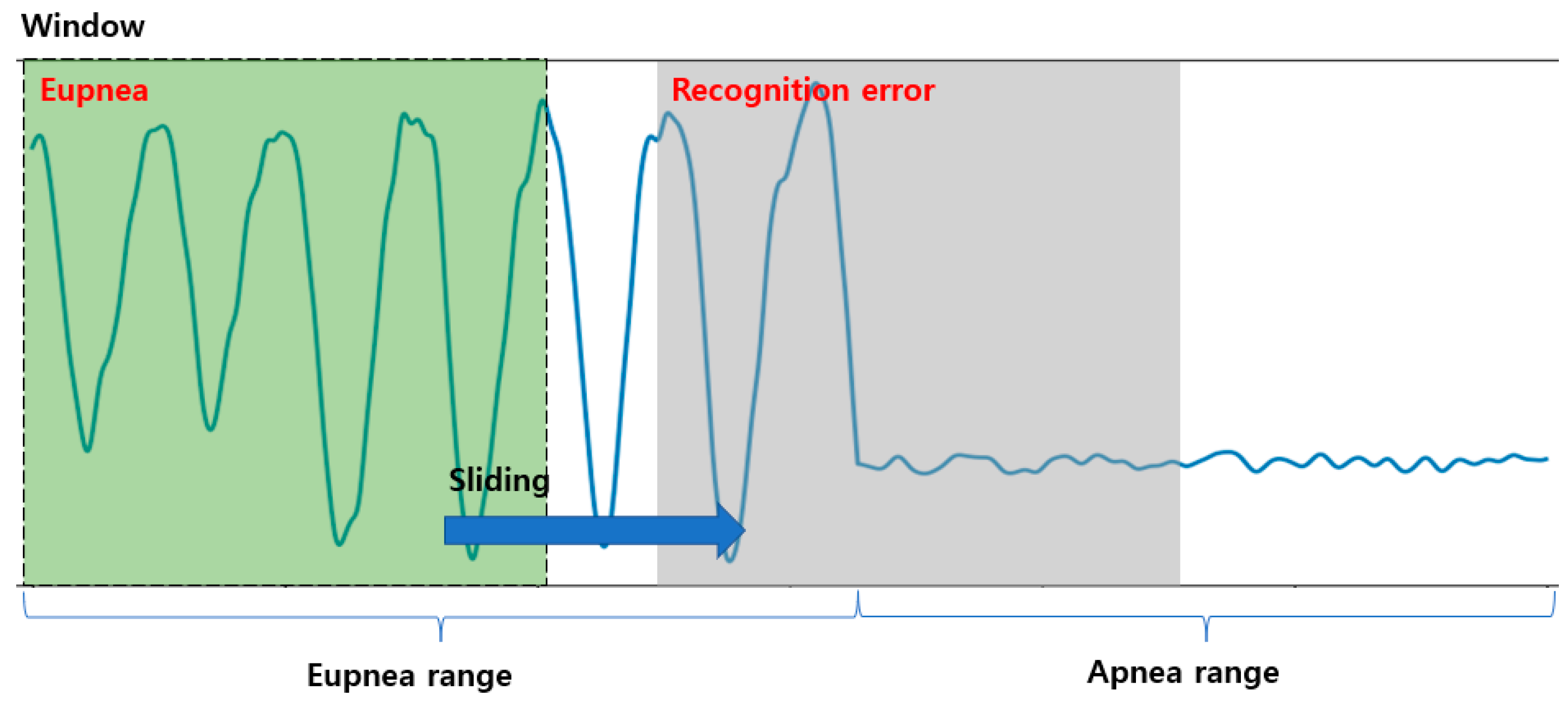
Figure 6.
Example of detection of a region with multiple respiration patterns using a 1D CNN and the sliding window method.
Figure 6.
Example of detection of a region with multiple respiration patterns using a 1D CNN and the sliding window method.
Figure 7.
Proposed 1D SNN training model for respiration pattern retrieval.
Figure 7.
Proposed 1D SNN training model for respiration pattern retrieval.
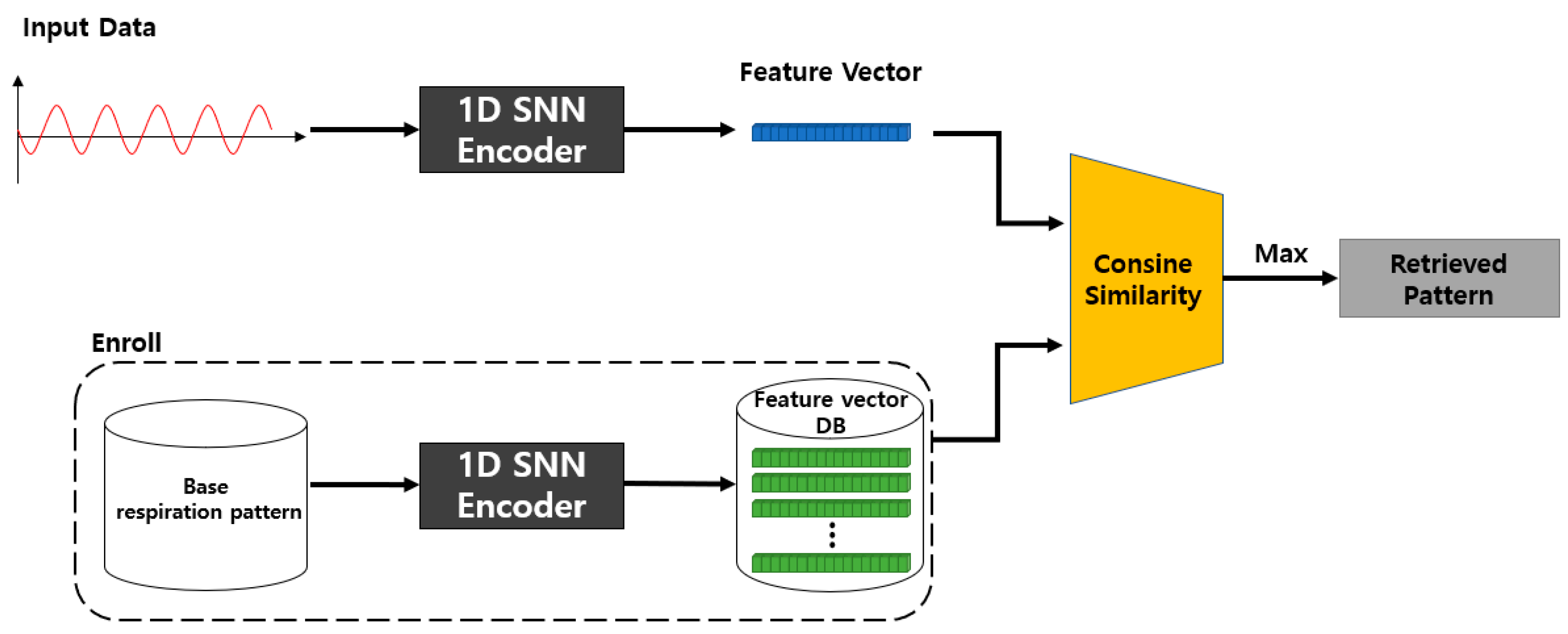
Figure 8.
Proposed 1D SNN inference model.
Figure 8.
Proposed 1D SNN inference model.
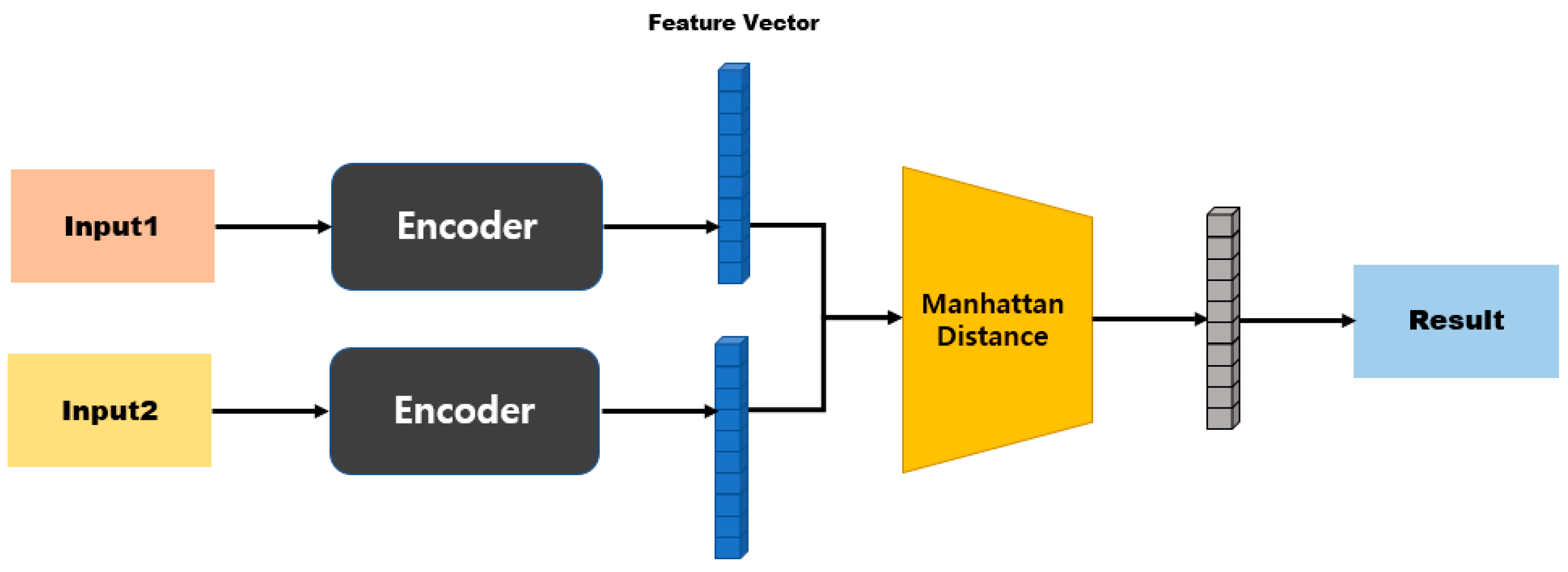
Figure 9.
Manhattan-distance-based model structure.
Figure 9.
Manhattan-distance-based model structure.
Figure 10.
Cosine-similarity-based model structure.
Figure 10.
Cosine-similarity-based model structure.
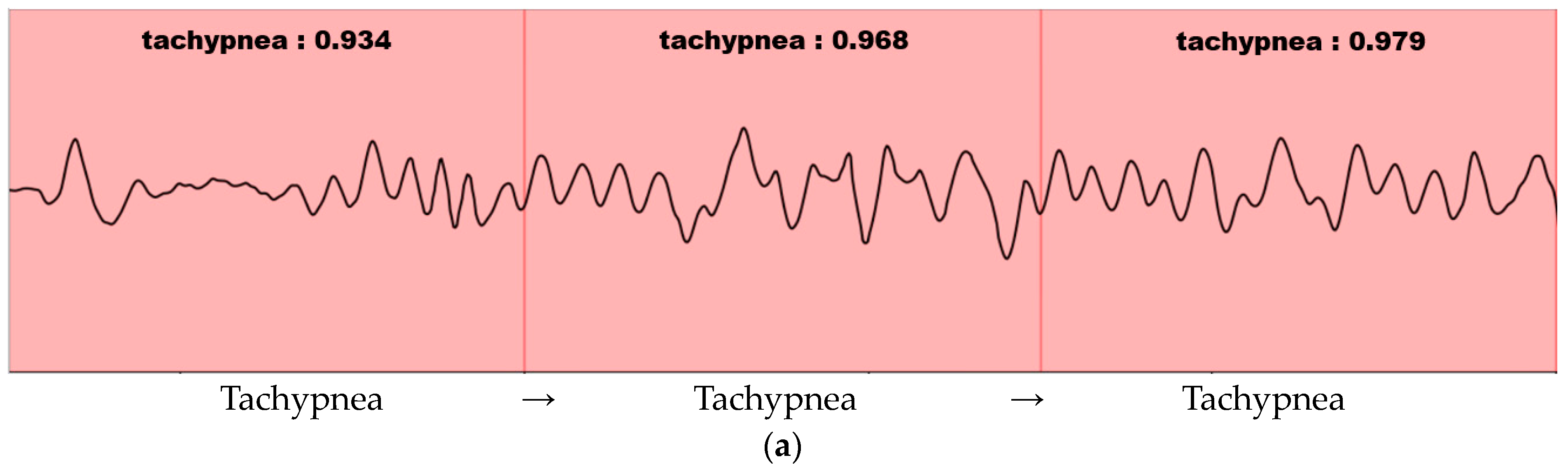
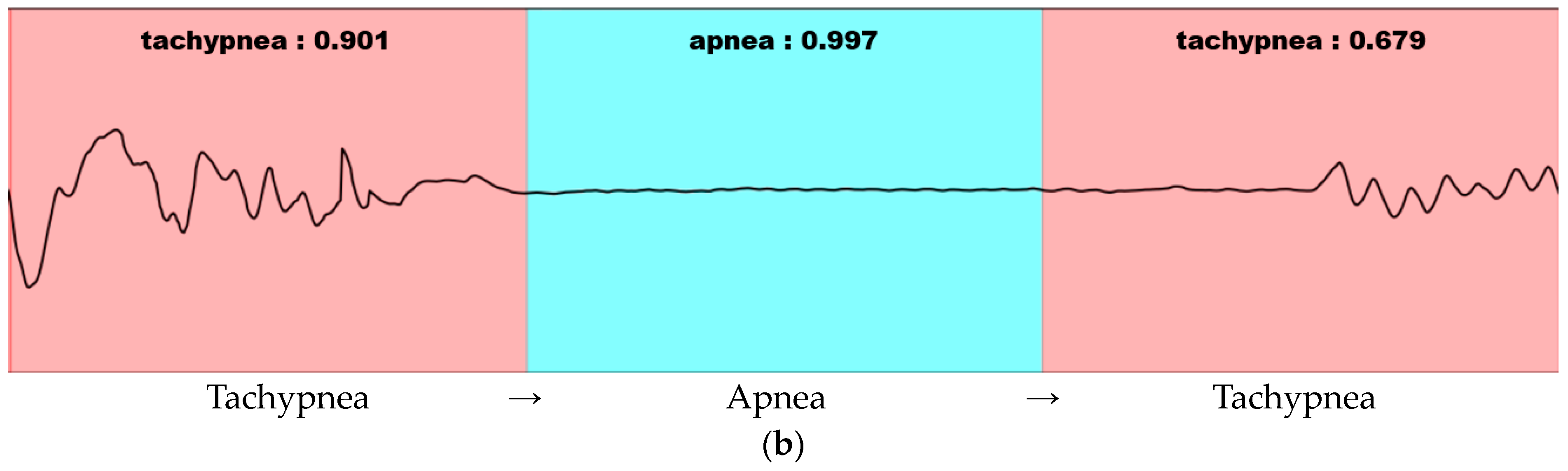
Figure 11.
Visualization of 1D-SNN-based respiration pattern recognition results in a continuous breathing range: (a) Detection result in the range where the respiration pattern does not change. (b) Detection result in the range where the respiration pattern changes. Pink indicates tachypnea and blue indicates apnea.
Figure 11.
Visualization of 1D-SNN-based respiration pattern recognition results in a continuous breathing range: (a) Detection result in the range where the respiration pattern does not change. (b) Detection result in the range where the respiration pattern changes. Pink indicates tachypnea and blue indicates apnea.
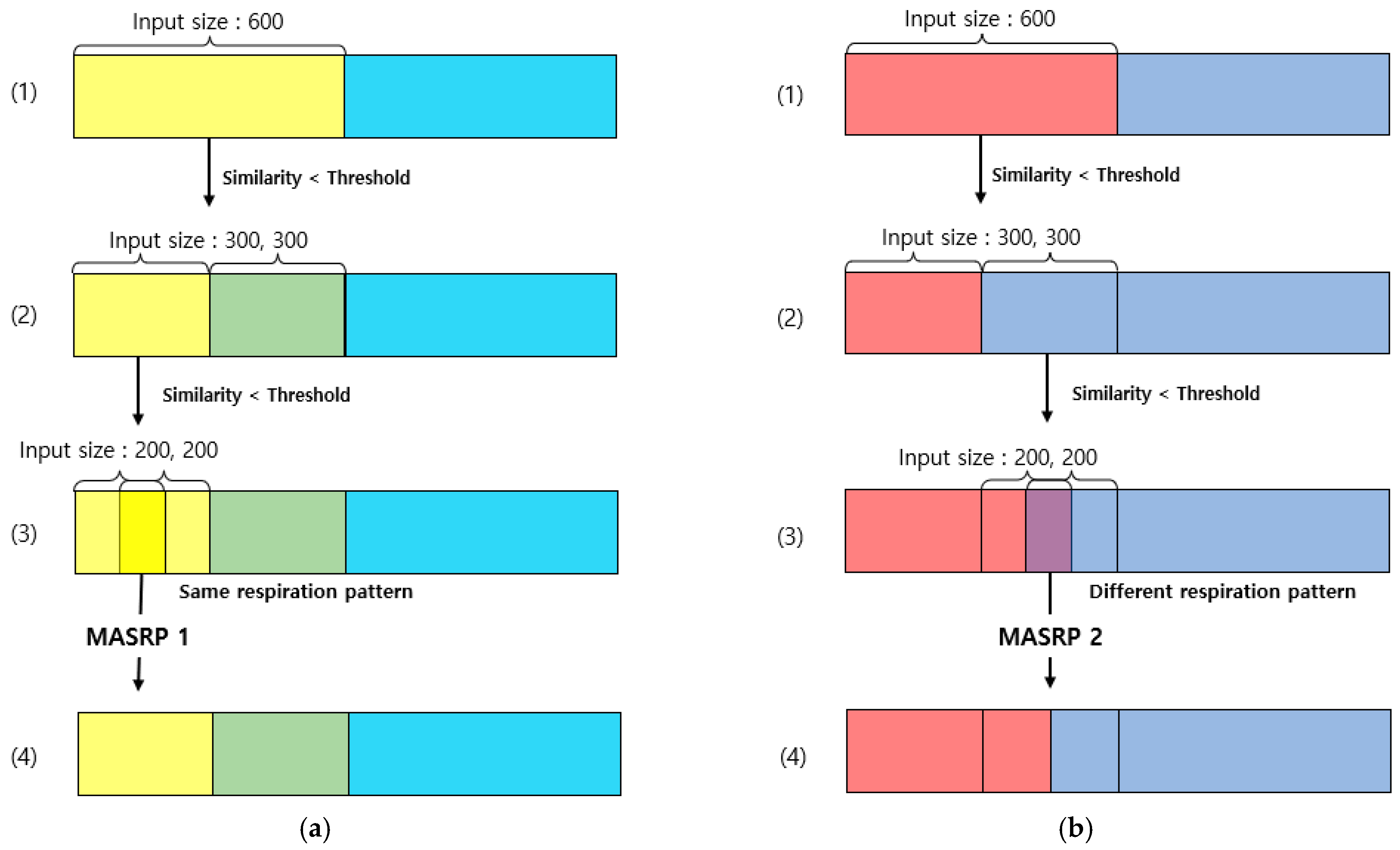
Figure 12.
Examples of merging and splitting performed on the respiration pattern recognition results of the 1D SNN: (a) Process of applying MASRP 1. (b) Process of applying MASRP 2. Each color is a respiration pattern, and (1)–(4) indicate the stages of merging and splitting.
Figure 12.
Examples of merging and splitting performed on the respiration pattern recognition results of the 1D SNN: (a) Process of applying MASRP 1. (b) Process of applying MASRP 2. Each color is a respiration pattern, and (1)–(4) indicate the stages of merging and splitting.
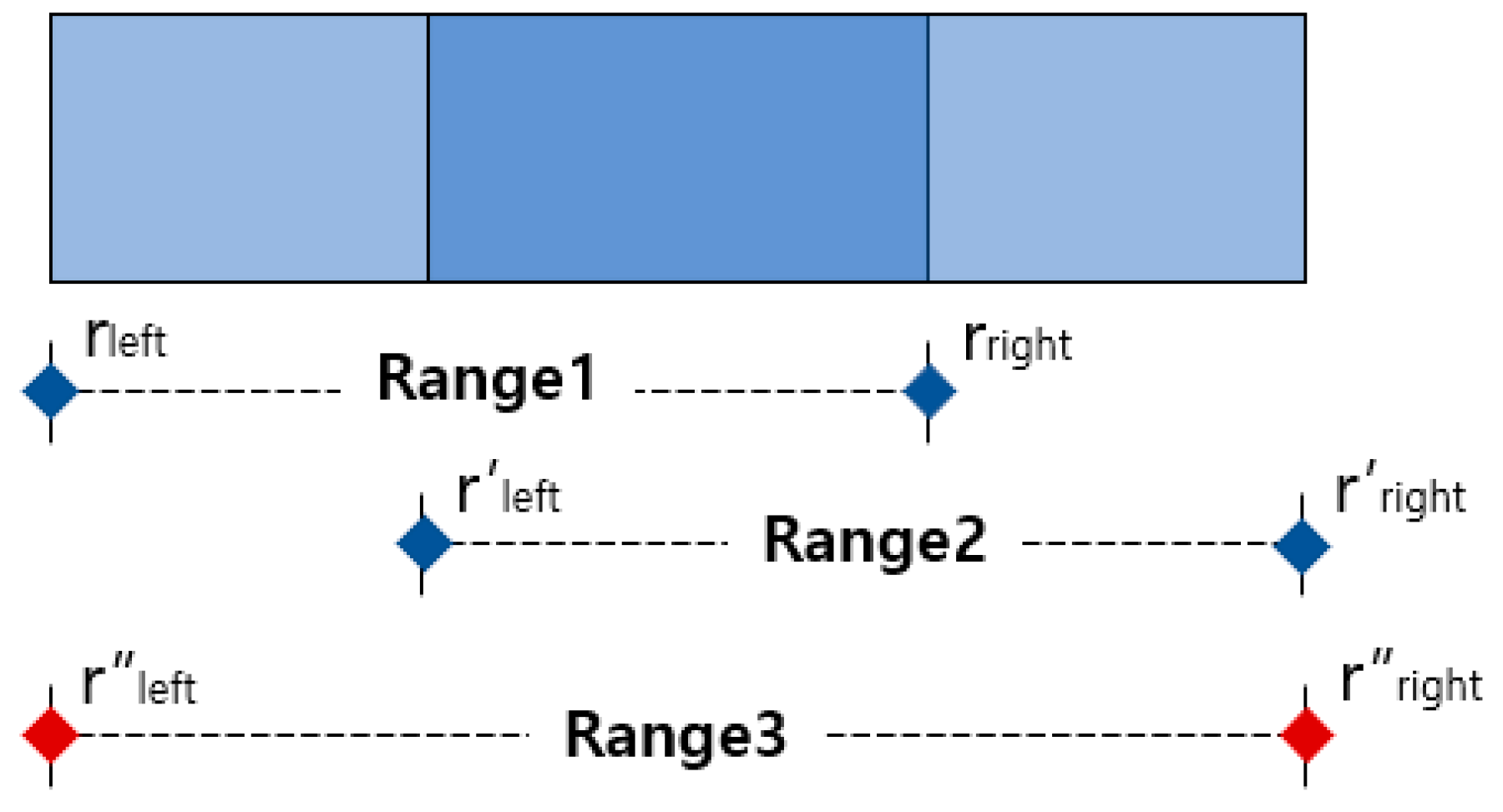
Figure 13.
Example of application of an algorithm that merges overlapping ranges of the same pattern. The red dot indicates the range of merged result.
Figure 13.
Example of application of an algorithm that merges overlapping ranges of the same pattern. The red dot indicates the range of merged result.
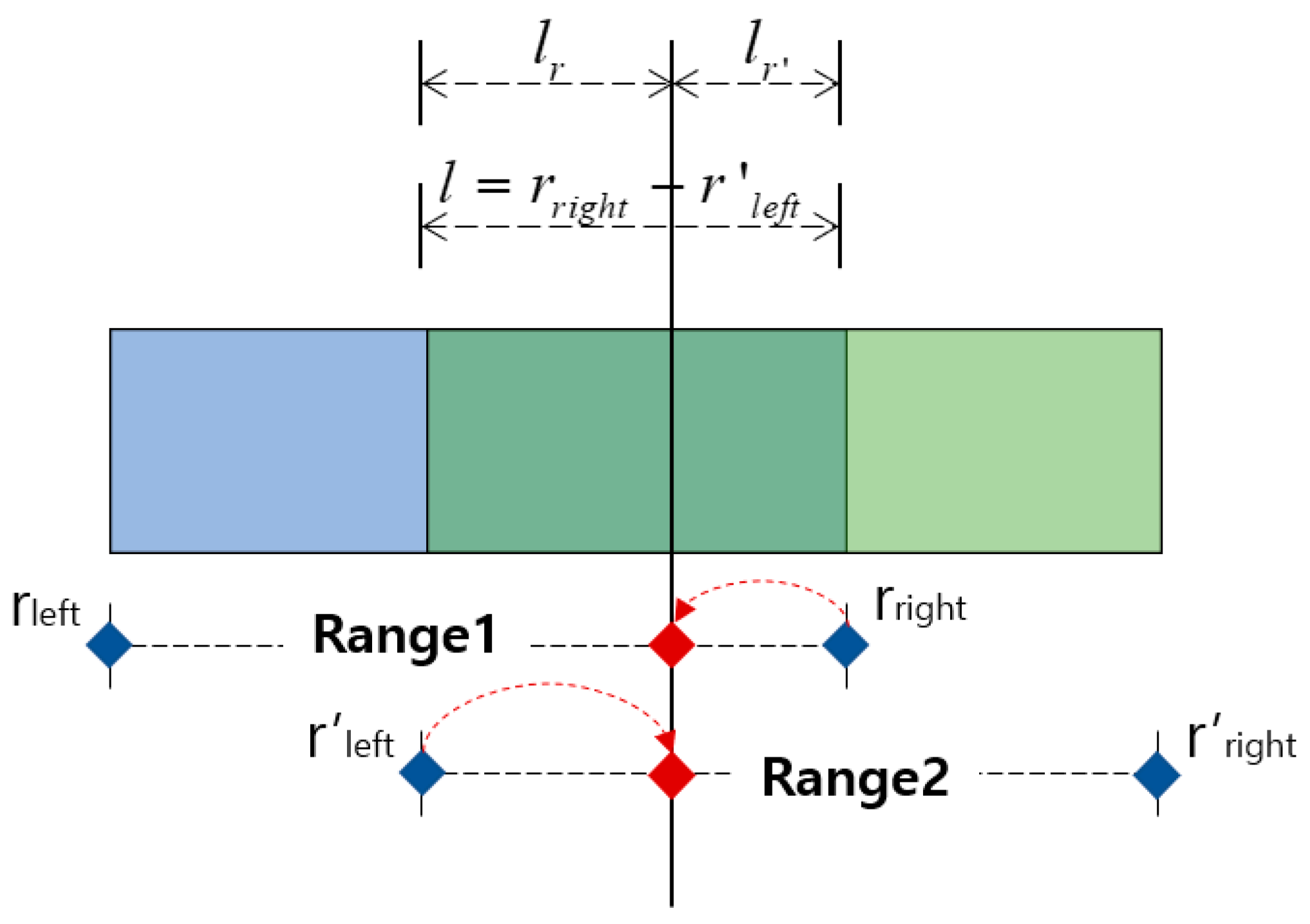
Figure 14.
Example of the splitting algorithm’s performance when two different patterns overlap one another as a result of detection. The red dot indicates the range of split result.
Figure 14.
Example of the splitting algorithm’s performance when two different patterns overlap one another as a result of detection. The red dot indicates the range of split result.
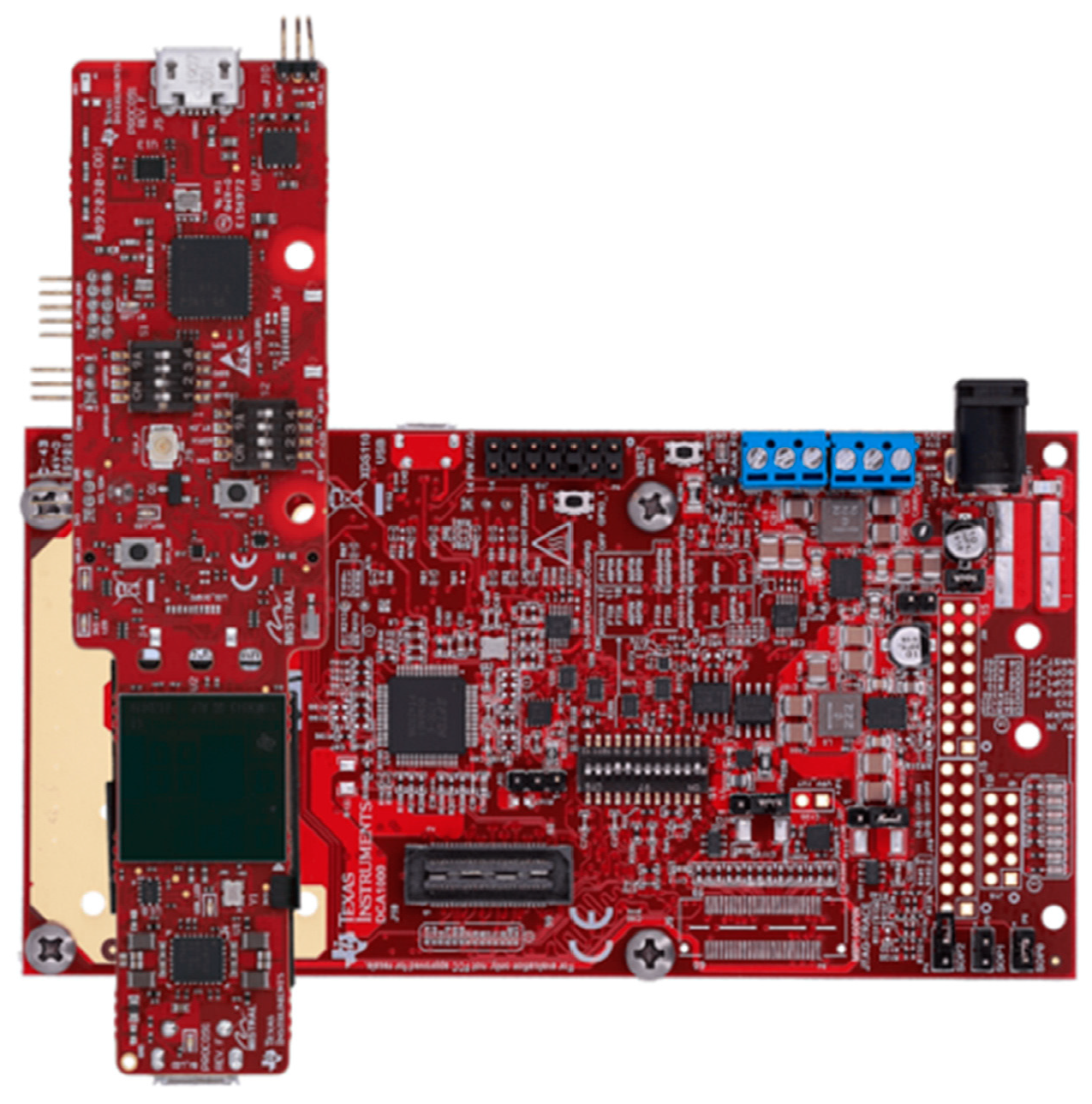
Figure 15.
The mmWave sensor used to collect breathing signal data.
Figure 15.
The mmWave sensor used to collect breathing signal data.
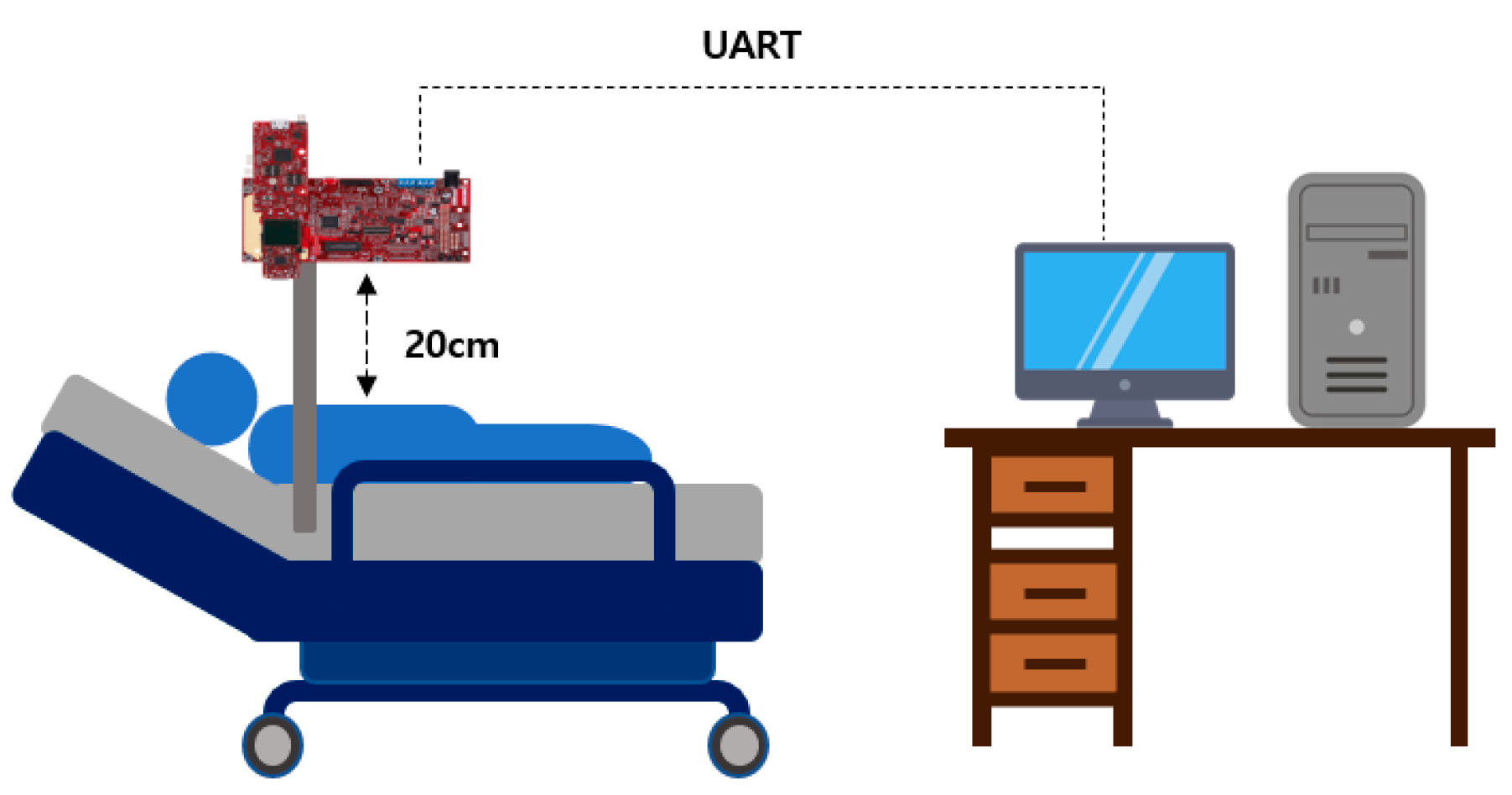
Figure 16.
The mmWave sensor installation environment for collecting breathing signal data.
Figure 16.
The mmWave sensor installation environment for collecting breathing signal data.
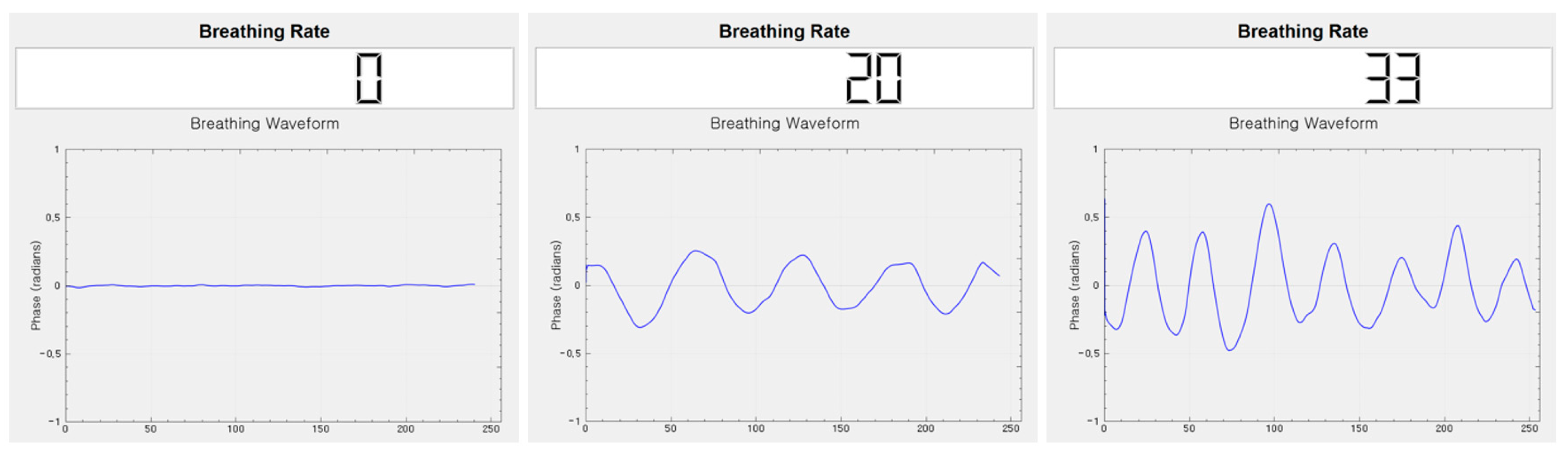
Figure 17.
Example of a breathing signal measured with the mmWave sensor.
Figure 17.
Example of a breathing signal measured with the mmWave sensor.
Figure 18.
Breathing data collection program using the mmWave sensor.
Figure 18.
Breathing data collection program using the mmWave sensor.
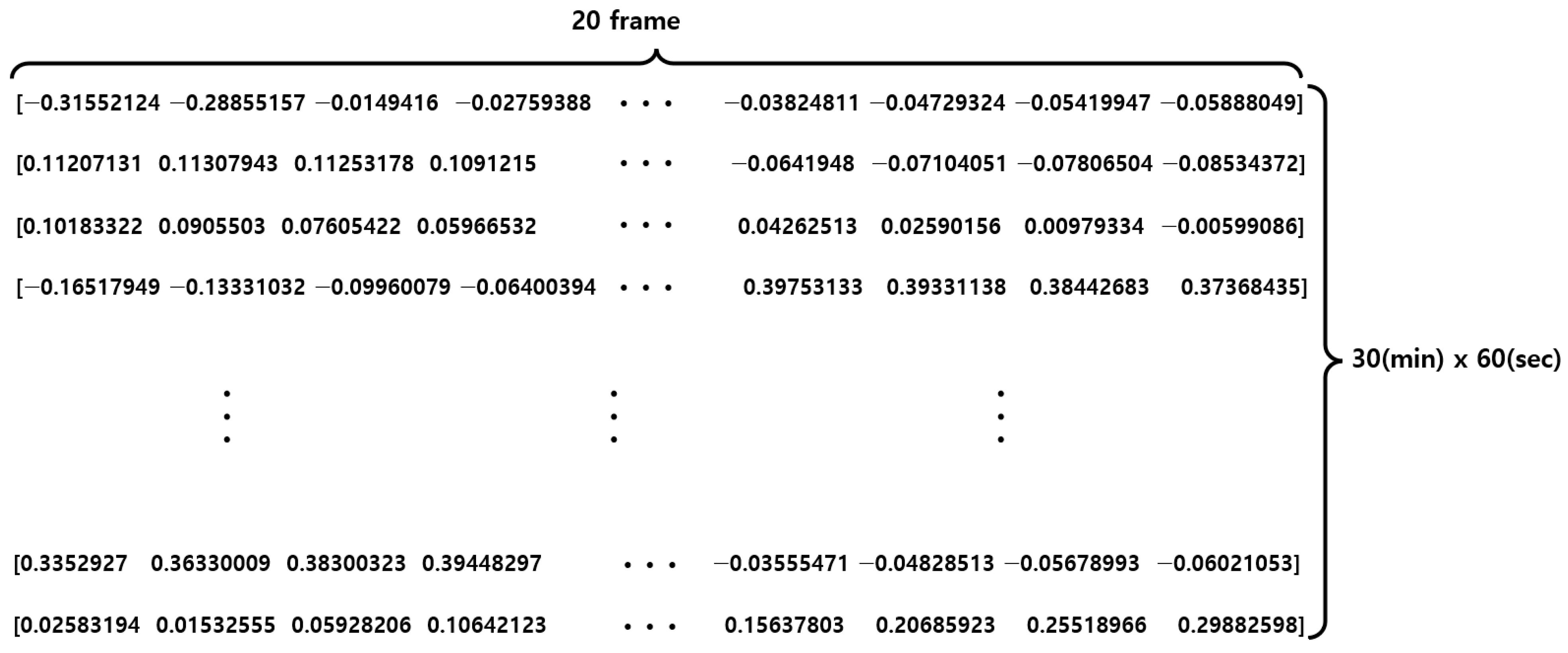
Figure 19.
Raw data structure of the mmWave sensor.
Figure 19.
Raw data structure of the mmWave sensor.
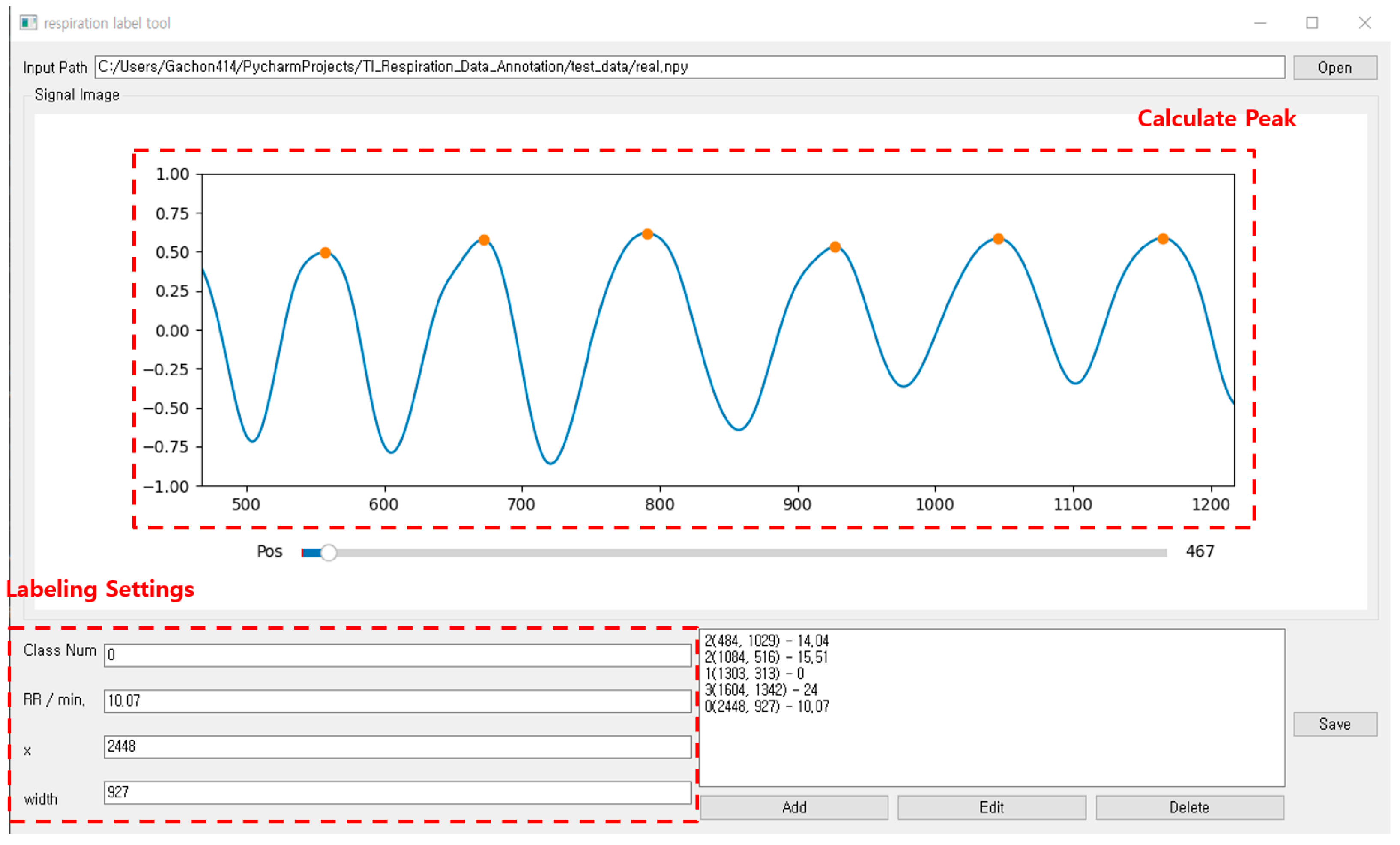
Figure 20.
Annotation tool for breathing data pattern area designation and labeling.
Figure 20.
Annotation tool for breathing data pattern area designation and labeling.
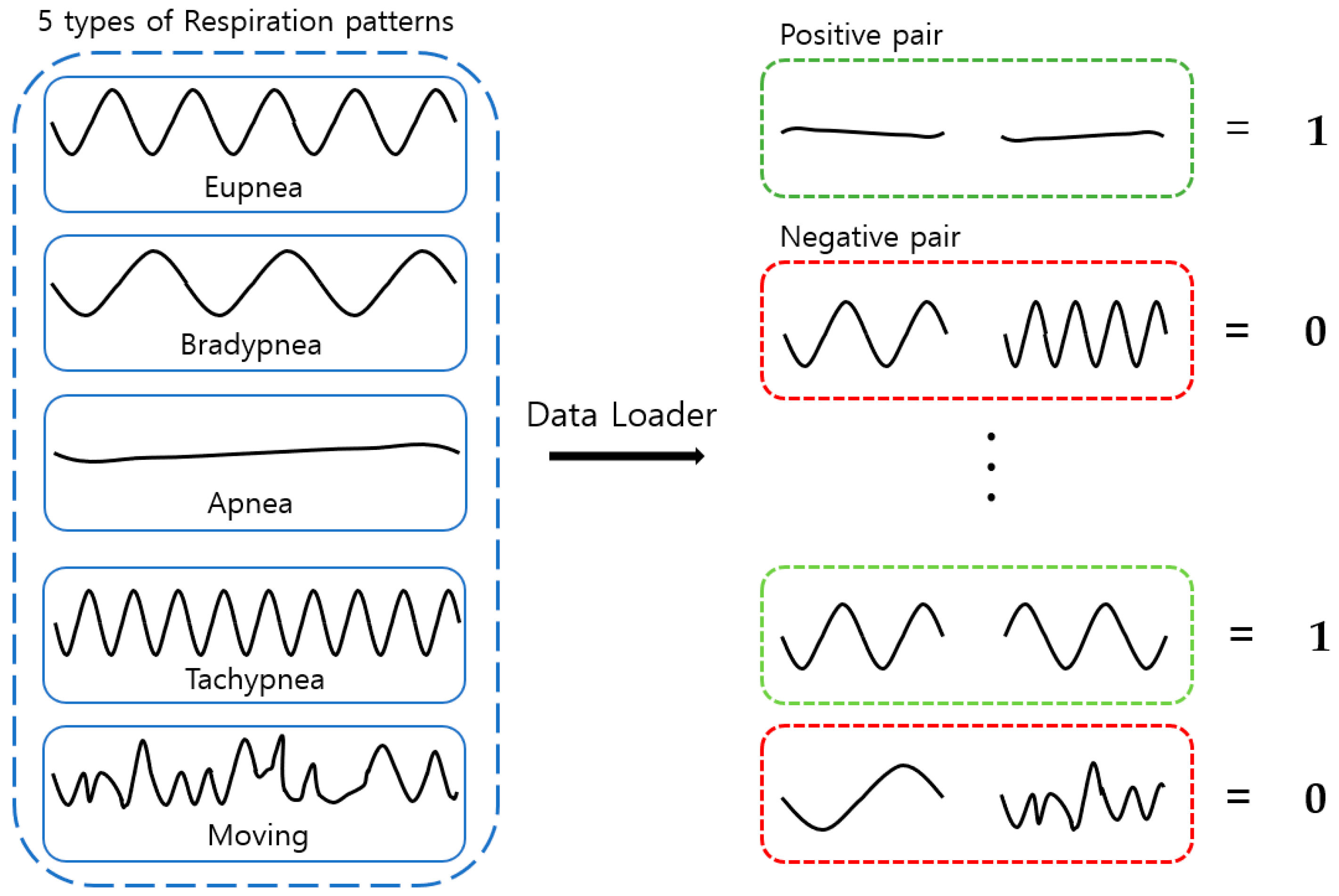
Figure 21.
Training and testing data loaders.
Figure 21.
Training and testing data loaders.
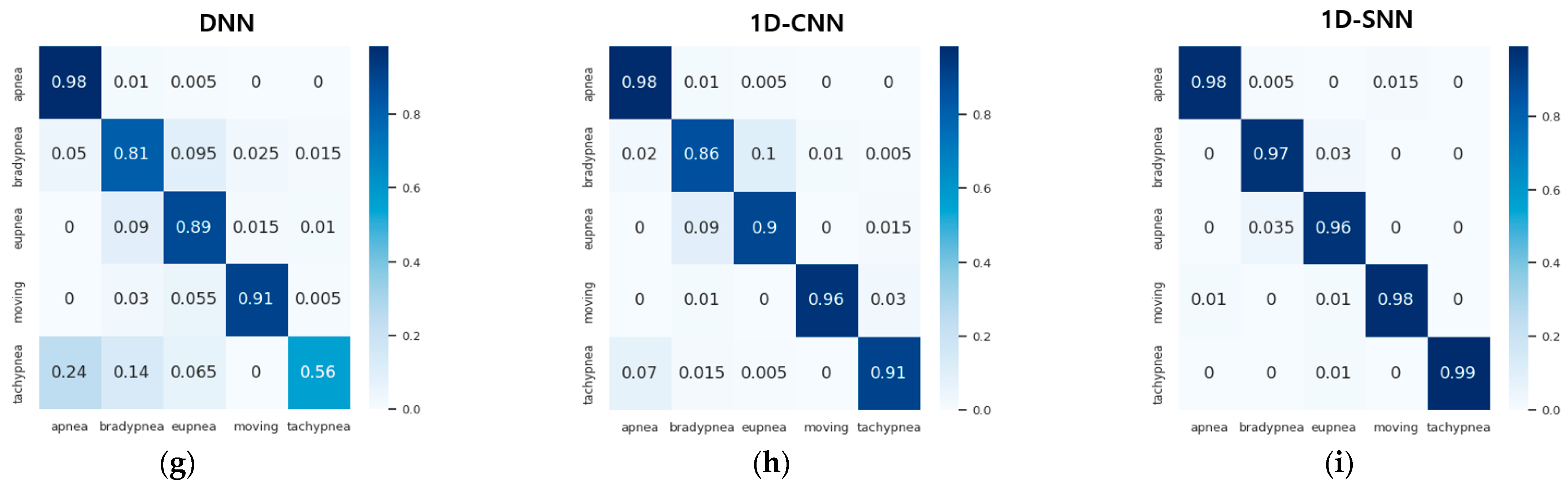
Figure 22.
Confusion matrix comparison of pattern recognition results between the proposed method and existing methods: (a) XGBoost method, (b) decision tree method, (c) SVM method, (d) RNN method, (e) LSTM method, (f) GRU method, (g) DNN method, (h) 1D CNN method, (i) 1D SNN method.
Figure 22.
Confusion matrix comparison of pattern recognition results between the proposed method and existing methods: (a) XGBoost method, (b) decision tree method, (c) SVM method, (d) RNN method, (e) LSTM method, (f) GRU method, (g) DNN method, (h) 1D CNN method, (i) 1D SNN method.
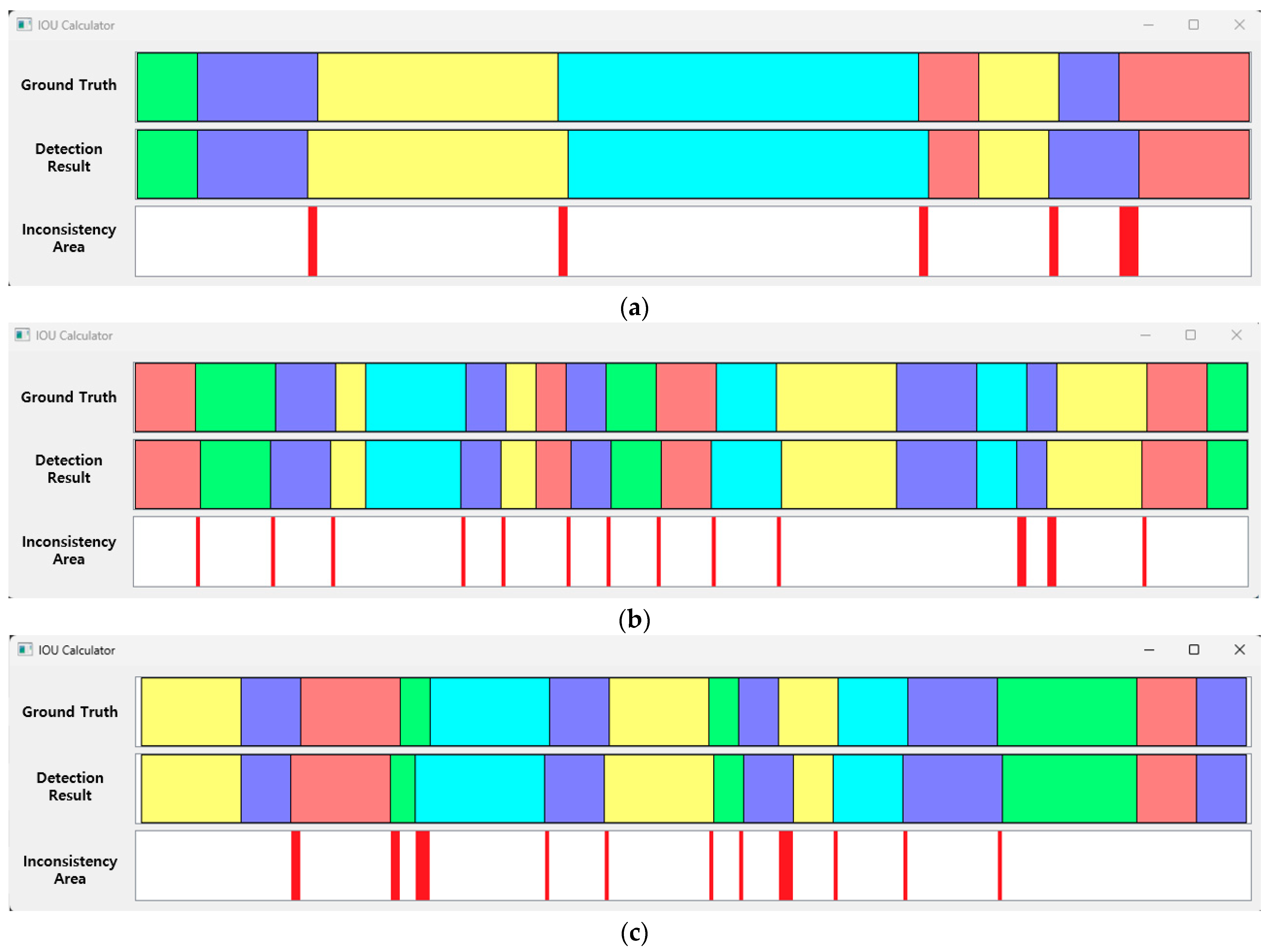
Figure 23.
IOU samples between the ground truth of the test data and the detection results of the proposed method (respiration pattern visualization: eupnea = blue, bradypnea = yellow, tachypnea = red, apnea = cyan, movement = green). (a) IOU: 94.6%, (b) IOU: 93.3%, (c) IOU: 92.4%.
Figure 23.
IOU samples between the ground truth of the test data and the detection results of the proposed method (respiration pattern visualization: eupnea = blue, bradypnea = yellow, tachypnea = red, apnea = cyan, movement = green). (a) IOU: 94.6%, (b) IOU: 93.3%, (c) IOU: 92.4%.
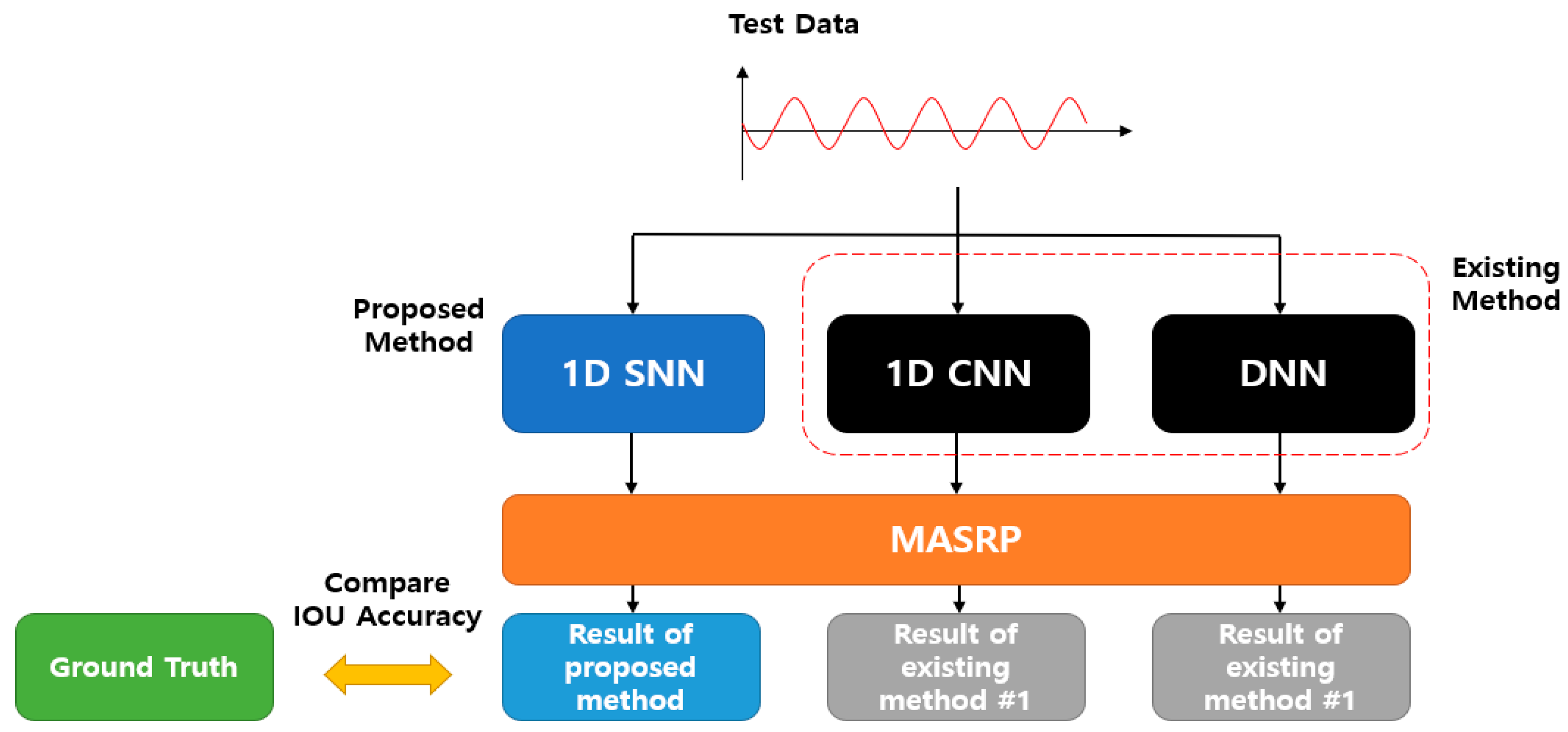
Figure 24.
IOU accuracy comparison evaluation method between the existing and proposed methods.
Figure 24.
IOU accuracy comparison evaluation method between the existing and proposed methods.
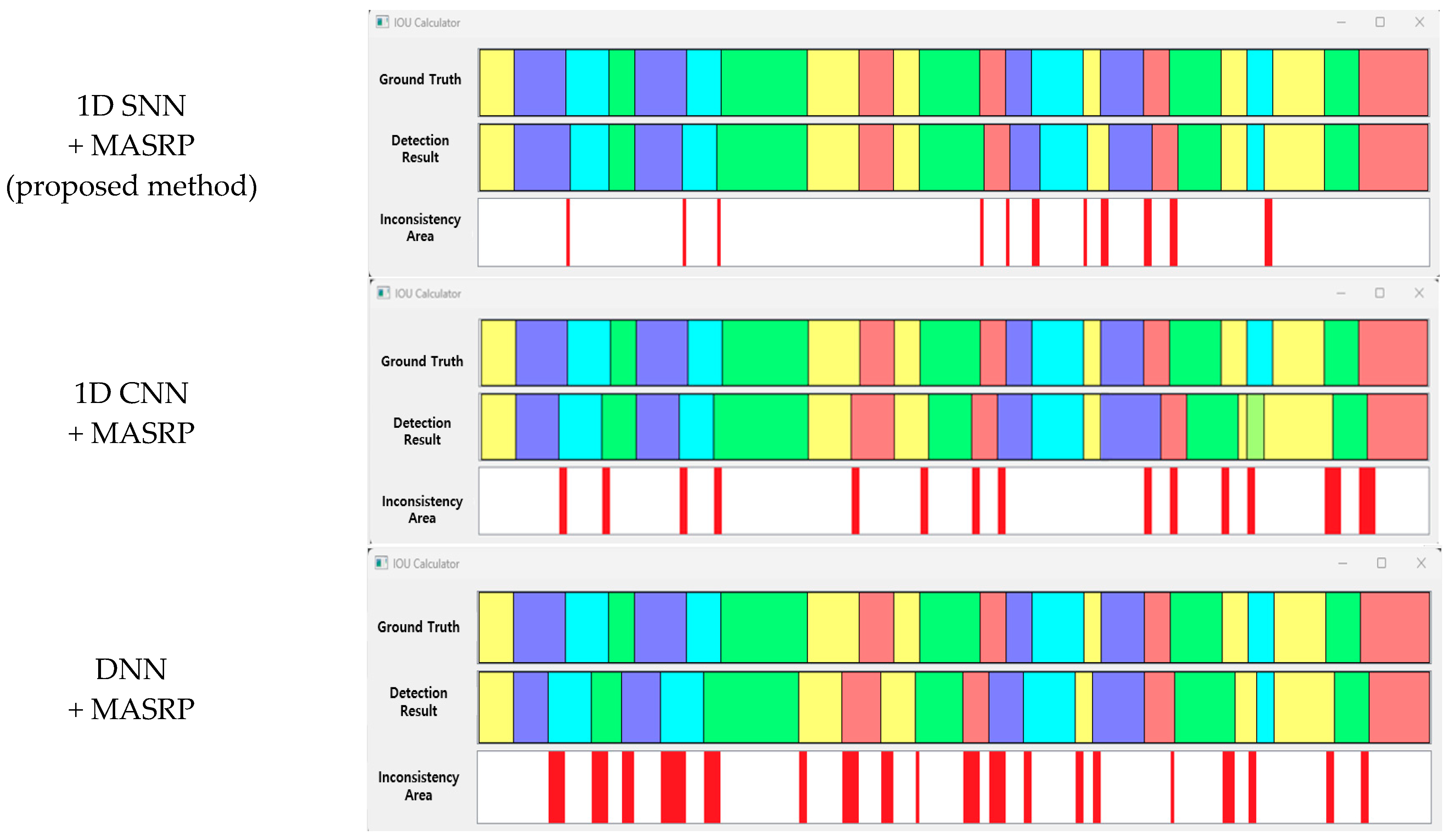
Figure 25.
Visualization of samples for IOU accuracy comparison between the existing method and the proposed methods (eupnea: blue, bradypnea: yellow, tachypnea: red, apnea: cyan, movement: green).
Figure 25.
Visualization of samples for IOU accuracy comparison between the existing method and the proposed methods (eupnea: blue, bradypnea: yellow, tachypnea: red, apnea: cyan, movement: green).
Table 1.
Error examples from the results retrieved in the respiration range containing multiple patterns (E: eupnea, B: bradypnea, T: tachypnea, A: apnea, M: movement). Error recognition is shown in red, and normal recognition is shown in blue.
Table 2.
Proposed 1D SNN architecture for detecting respiration patterns.
Table 2.
Proposed 1D SNN architecture for detecting respiration patterns.
| Layer | Type A | Filters | Size/Stride | Type B |
|---|
| 0 | Conv1D | 64 | 20 × 1/1 | Conv1D |
| 1 | BatchNorm1D | 64 | | BatchNorm1D |
| 2 | ReLU | | | ReLU |
| 3 | MaxPool1D | | 2 × 1/2 | MaxPool1D |
| 4 | Conv1D | 32 | 20 × 1/1 | Conv1D |
| 5 | BatchNorm1D | 32 | | BatchNorm1D |
| 6 | ReLU | | | ReLU |
| 7 | MaxPool1D | | 2 × 1/2 | MaxPool1D |
| 8 | Conv1D | 16 | 20 × 1/1 | Conv1D |
| 9 | BatchNorm1D | 16 | | BatchNorm1D |
| 10 | ReLU | | | ReLU |
| 11 | MaxPool1D | | 2 × 1/2 | MaxPool1D |
| 12 | FC | | | FC |
| 13 | FC | | | FC |
| 14 | FC | | | FC |
| 15 | Cosine similarity (embedding vector of type A; embedding vector of type B) |
Table 3.
Existing DNN architecture for detecting respiration patterns.
Table 3.
Existing DNN architecture for detecting respiration patterns.
| Layer | Type | Input Size | Output Size |
|---|
| 0 | Linear | 300 | 256 |
| 1 | BatchNorm1D | 256 | |
| 2 | ReLU | | |
| 3 | Linear | 256 | 128 |
| 4 | BatchNorm1D | 128 | |
| 5 | ReLU | | |
| 6 | Linear | 128 | 64 |
| 7 | BatchNorm1D | 64 | |
| 8 | ReLU | | |
| 9 | Linear | 64 | 32 |
| 10 | BatchNorm1D | 32 | |
| 11 | ReLU | | |
| 12 | Linear | 32 | 5 |
| 13 | BatchNorm1D | 5 | |
| 14 | ReLU | | |
| 15 | Softmax | 5 | 5 |
Table 4.
Existing 1D CNN architecture for detecting respiration patterns.
Table 4.
Existing 1D CNN architecture for detecting respiration patterns.
| Layer | Type A | Filters | Size/Stride |
|---|
| 0 | Conv1D | 256 | 20 × 1/1 |
| 1 | BatchNorm1D | 256 | |
| 2 | ReLU | | |
| 3 | MaxPool1D | | 2 × 1/2 |
| 4 | Conv1D | 128 | 20 × 1/1 |
| 5 | BatchNorm1D | 128 | |
| 6 | ReLU | | |
| 7 | MaxPool1D | | 2 × 1/2 |
| 8 | Conv1D | 64 | 10 × 1/1 |
| 9 | BatchNorm1D | 64 | |
| 10 | ReLU | | |
| 11 | MaxPool1D | | 2 × 1/2 |
| 12 | Dropout | | 0.4 |
| 13 | FC | | |
| 14 | FC | | |
| 15 | FC | | |
| 16 | Softmax | | |
Table 5.
Layer configuration diagram according to the input size for the proposed model.
Table 5.
Layer configuration diagram according to the input size for the proposed model.
| Size | Layer | Architecture | Output Dim. |
|---|
| 100 | 2 | CBRM | CBRM | FC | FC | - | - | - | 32 |
| 3 | CBRM | CBRM | CBRM | FC | FC | - | - |
| 200 | 2 | CBRM | CBRM | FC | FC | FC | - | - |
| 3 | CBRM | CBRM | CBRM | FC | FC | - | - |
| 4 | CBRM | CBRM | CBRM | CBRM | FC | FC | - |
| 300 | 2 | CBRM | CBRM | FC | FC | FC | FC | - |
| 3 | CBRM | CBRM | CBRM | FC | FC | FC | - |
| 4 | CBRM | CBRM | CBRM | CBRM | FC | FC | - |
| 600 | 2 | CBRM | CBRM | FC | FC | FC | - | - |
| 3 | CBRM | CBRM | CBRM | FC | FC | FC | FC |
| 4 | CBRM | CBRM | CBRM | CBRM | FC | FC | FC |
| 5 | CBRM | CBRM | CBRM | CBRM | CBRM | FC | FC |
Table 6.
The mmWave sensor specifications for breathing data measurement.
Table 6.
The mmWave sensor specifications for breathing data measurement.
| Item | Specification |
|---|
| Maximum detection range | 20 m |
| Frequency range | 60–64 GHz |
| Elevation FOV | ±60° |
| Gain | 5 dBi |
| Azimuth FOV | ±60° |
Table 7.
Learning and testing system environment of the proposed 1D SNN.
Table 7.
Learning and testing system environment of the proposed 1D SNN.
| Item | Specification |
|---|
| CPU | Intel Core i7-10700K |
| GPU | NVIDIA GeForce RTX 3090Ti |
| RAM | 64 GB |
| O/S | Ubuntu20.04 |
| Deep learning framework | PyTorch |
| Program language | Python3.8 |
| CUDA/CuDNN | 11.3/8.1.3 |
| IDE | PyCharm |
| Other libraries | PyQT5, Python-Opencv |
Table 8.
Results of annotation based on the ground truth for each breathing dataset.
Table 8.
Results of annotation based on the ground truth for each breathing dataset.
| No. of Data | Data Length | Number of E Pattern | Number of T Patterns | Number of B Patterns | Number of A
Patterns | Number of M
Patterns |
|---|
| 1 | 20 (data) × 60 (s) × 30 (min) =
36,000 | 6 | 3 | 2 | 3 | 5 |
| 2 | 3 | 3 | 1 | 2 | 1 |
| 3 | 6 | 3 | 3 | 1 | 2 |
| 4 | 5 | 2 | 3 | 1 | 1 |
| 5 | 5 | 2 | 4 | 2 | 1 |
| ... | ... |
| 298 | 7 | 2 | 3 | 5 | 2 |
| 299 | 5 | 6 | 6 | 4 | 4 |
| 300 | 4 | 3 | 4 | 4 | 6 |
Table 9.
Definition of SNN hyperparameters.
Table 9.
Definition of SNN hyperparameters.
| Hyperparameters | Definition | Defined Parameters |
|---|
| Test trials | Test one-shot trials | 400 |
| Way | Ways in the one-shot trials | 5 |
| Num train | Respiration values in training dataset | 90,000 |
| Batch size | Respiration values in each batch of data | 4096 |
| Num workers | Sub-processes to use for data loading | 4 |
| Shuffle | Whether to shuffle the dataset between epochs | True |
| Epochs | Epochs to train | 200 |
| Init momentum | Initial layer-wise momentum value | 0.5 |
| Lr patience | Number of epochs to wait before reducing lr | 1 |
| Train patience | Number of epochs to wait before stopping train | 20 |
Table 10.
The 1:1 verification accuracy per input data size and metric.
Table 10.
The 1:1 verification accuracy per input data size and metric.
| Input Data Size | Metric | Layer | Accuracy |
|---|
| 100 | Cosine similarity | 2 | 82.19 |
| 3 | 82.81 |
| Manhattan distance | 2 | 71.56 |
| 3 | 81.56 |
| 200 | Cosine similarity | 2 | 91.56 |
| 3 | 90.94 |
| 4 | 92.50 |
| Manhattan distance | 2 | 80.63 |
| 3 | 82.81 |
| 4 | 84.06 |
| 300 | Cosine similarity | 2 | 96.56 |
| 3 | 98.44 |
| 4 | 93.44 |
| Manhattan distance | 2 | 80.63 |
| 3 | 88.13 |
| 4 | 86.56 |
| 600 | Cosine similarity | 2 | 97.81 |
| 3 | 98.05 |
| 4 | 96.56 |
| 5 | 95.31 |
| Manhattan distance | 2 | 56.88 |
| 3 | 66.13 |
| 4 | 89.06 |
| 5 | 86.56 |
Table 11.
Top-1 accuracy for respiration pattern detection according to the input size and layer depth.
Table 11.
Top-1 accuracy for respiration pattern detection according to the input size and layer depth.
| Input Data Size | Layer | Accuracy |
|---|
| 100 | 2 | 87.4 |
| 3 | 84.2 |
| 200 | 2 | 91.6 |
| 3 | 92.0 |
| 4 | 91.8 |
| 300 | 2 | 95.6 |
| 3 | 97.6 |
| 4 | 91.8 |
| 600 | 2 | 97.0 |
| 3 | 97.4 |
| 4 | 96.2 |
| 5 | 95.4 |
Table 12.
Comparison of accuracy for each respiration pattern between the proposed method and existing methods.
Table 12.
Comparison of accuracy for each respiration pattern between the proposed method and existing methods.
| Method | Apnea | Bradypnea | Eupnea | Movement | Tachypnea | Avg. (%) |
|---|
| XGBoost | 0.93 | 0.59 | 0.76 | 0.89 | 0.83 | 80.1 |
| Decision tree | 0.81 | 0.41 | 0.55 | 0.56 | 0.47 | 56.3 |
| SVM | 0.99 | 0.52 | 0.88 | 0.97 | 0.14 | 69.9 |
| RNN | 0.94 | 0.73 | 0.87 | 0.84 | 0.58 | 79.5 |
| LSTM | 0.82 | 0.68 | 0.93 | 0.8 | 0.65 | 77.5 |
| GRU | 0.85 | 0.62 | 0.81 | 0.62 | 0.64 | 70.8 |
| DNN | 0.98 | 0.81 | 0.89 | 0.91 | 0.56 | 83.2 |
| 1D CNN | 0.98 | 0.86 | 0.90 | 0.96 | 0.91 | 92.3 |
| 1D SNN | 0.98 | 0.97 | 0.96 | 0.98 | 0.99 | 97.6 |
Table 13.
Comparison of precision, recall, and F1 score between the proposed method and the existing methods for each respiration pattern.
Table 13.
Comparison of precision, recall, and F1 score between the proposed method and the existing methods for each respiration pattern.
| Method | Precision | Recall | F1 Score |
|---|
| XGBoost | 0.801 | 0.801 | 0.801 |
| Decision tree | 0.567 | 0.559 | 0.563 |
| SVM | 0.718 | 0.701 | 0.709 |
| RNN | 0.798 | 0.794 | 0.796 |
| LSTM | 0.781 | 0.775 | 0.778 |
| GRU | 0.707 | 0.707 | 0.707 |
| DNN | 0.846 | 0.83 | 0.838 |
| 1D CNN | 0.924 | 0.923 | 0.923 |
| 1D SNN | 0.977 | 0.977 | 0.977 |
Table 14.
Average IOU accuracy of the proposed method and the existing methods for test data.
Table 14.
Average IOU accuracy of the proposed method and the existing methods for test data.
| No. | 1D SNN + MASRP
(Proposed Method) | 1D CNN + MASRP | DNN + MASRP |
|---|
| 1 | 93.1% | 81.4% | 72.8% |
| 2 | 93.6% | 83.9% | 76.4% |
| 3 | 92.8% | 78.6% | 71.4% |
| 4 | 95.2% | 84.7% | 78.9% |
| 5 | 94.7% | 83.4% | 71.8% |
| … |
| 49 | 93.4% | 80.2% | 73.6% |
| 50 | 92.5% | 79.8% | 70.4% |
| Avg. | 93.9% | 81.5% | 74.2% |
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




