
Analysis of Polarization Detector Performance Parameters on Polarization 3D Imaging Accuracy

 , ,
, , 
Abstract
1. Introduction
2. Preliminary Knowledge
2.1. Representation of Polarization
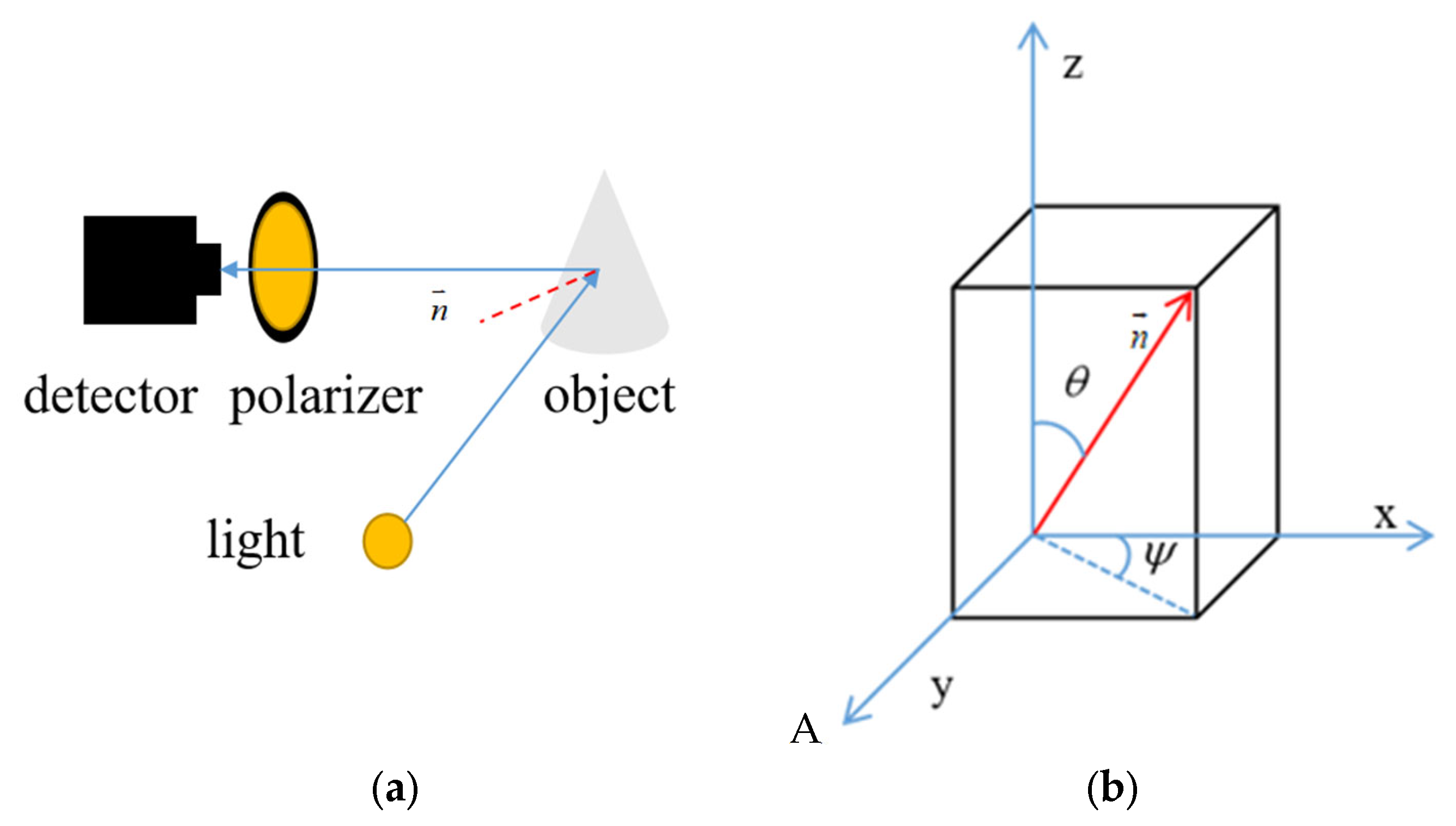
2.2. Object Surface Normal Vector
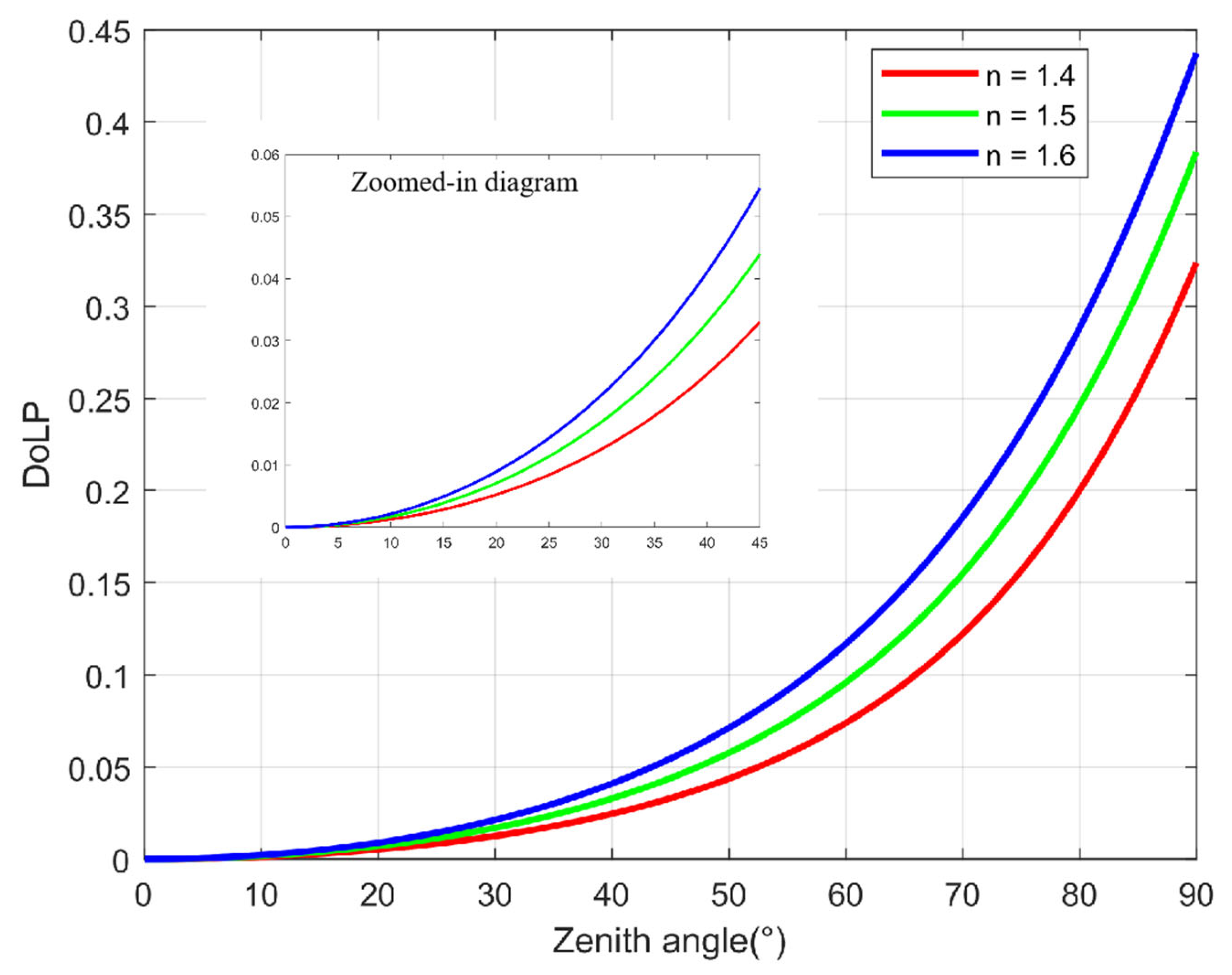
2.3. Basic Principles of Diffuse Polarization 3D Imaging
2.4. Fundamental of Error Propagation
3. Influence of Polarization Detector Performance Parameters on Polarization 3D Reconstruction
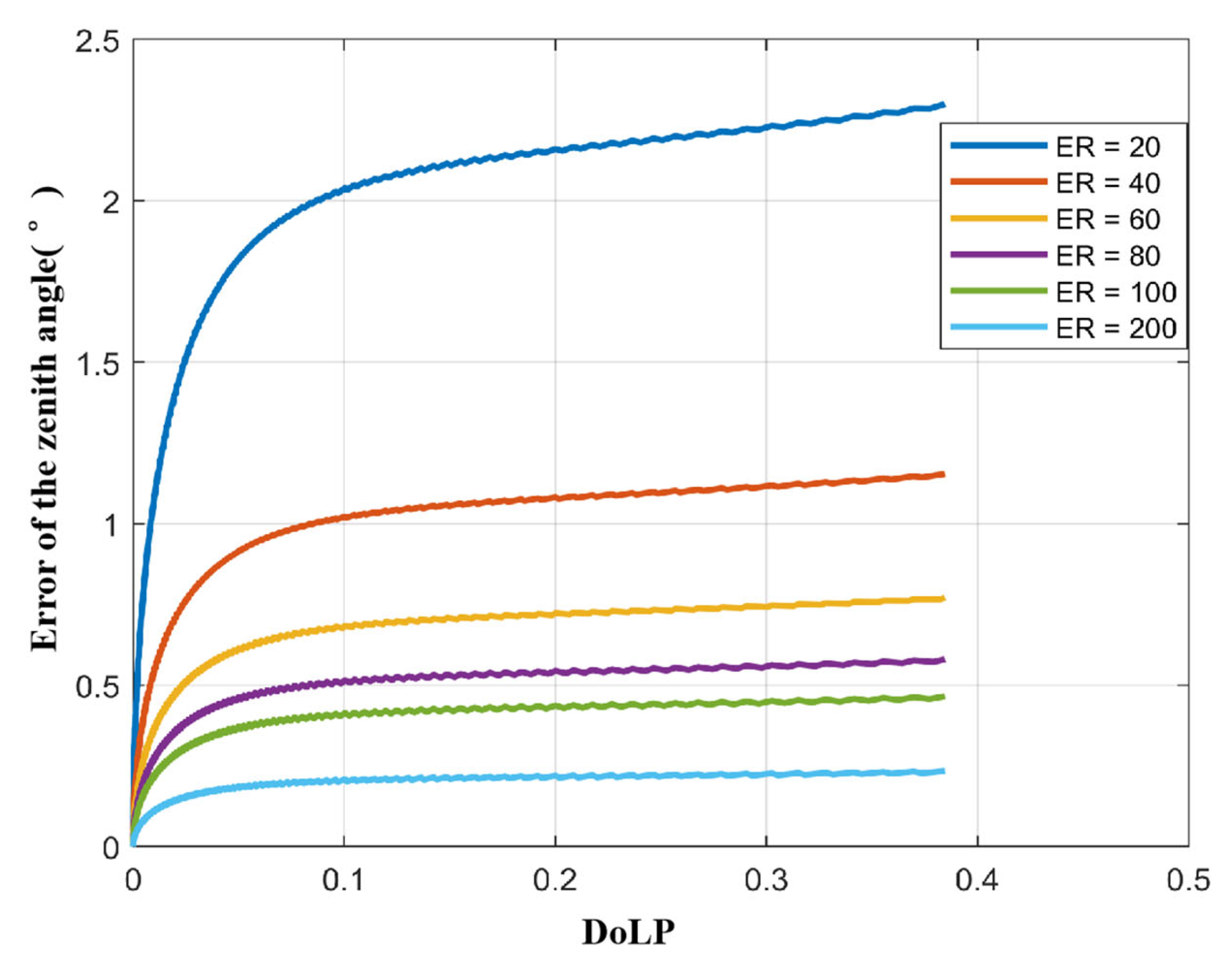
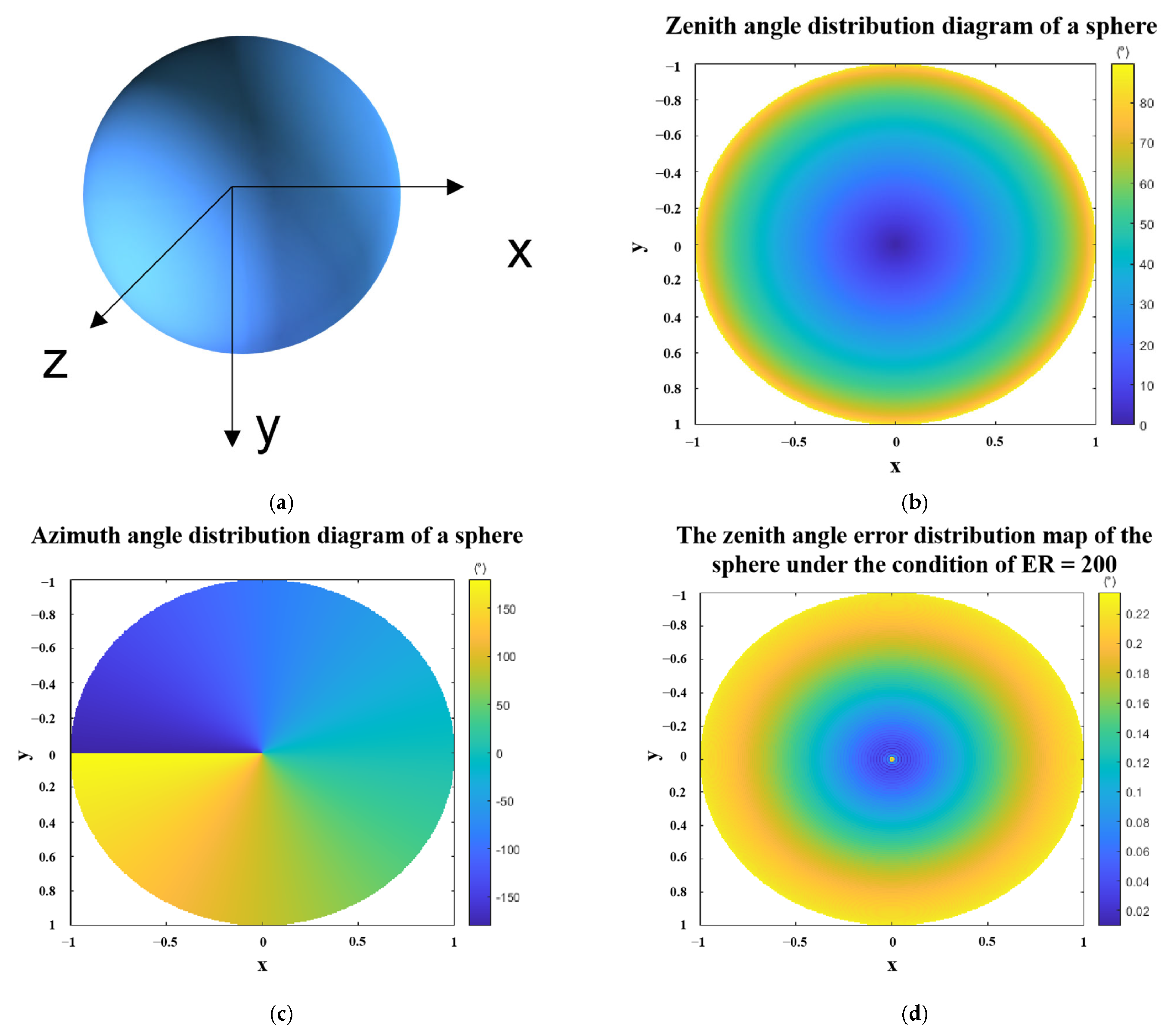
3.1. Influence of Polarizer Extinction Ratio on Polarization 3D Reconstruction Accuracy
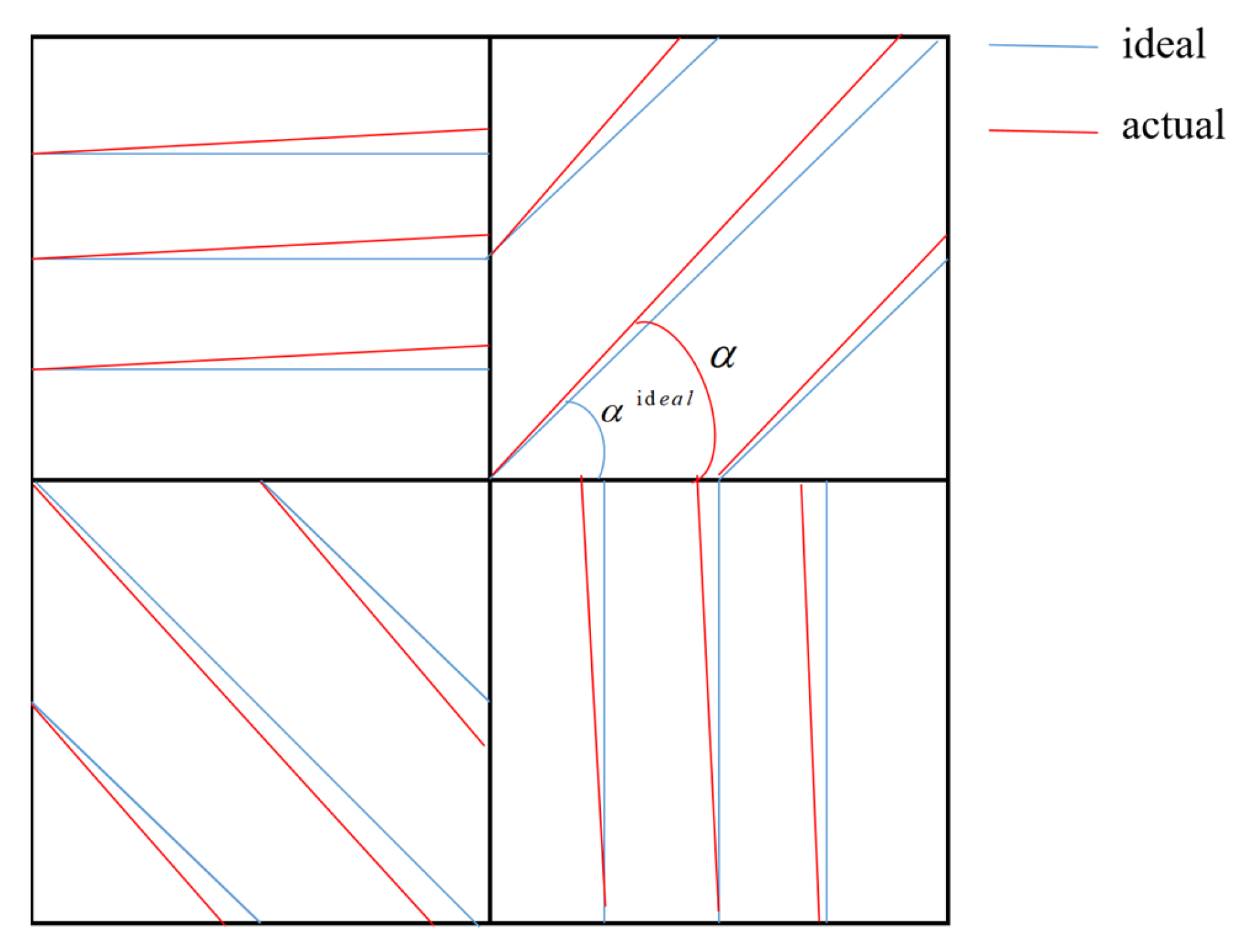
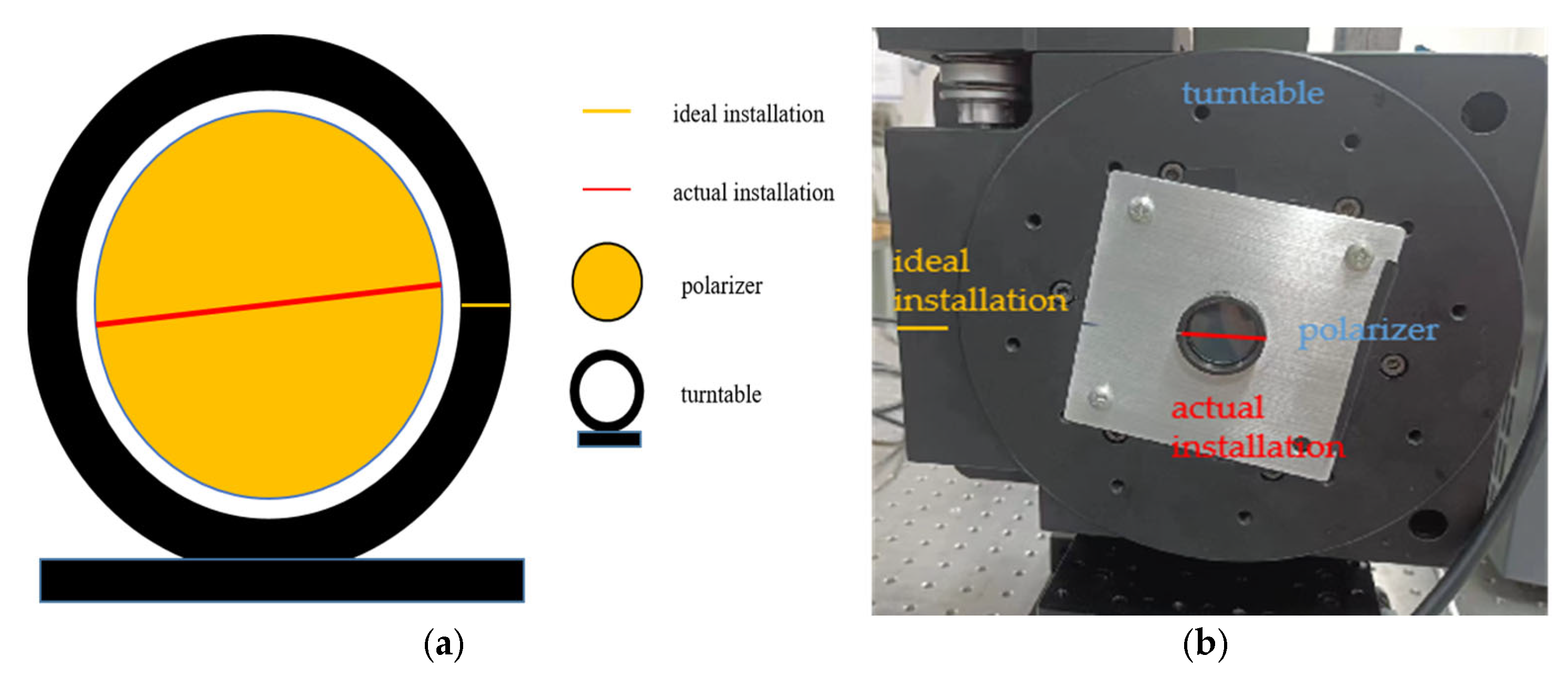
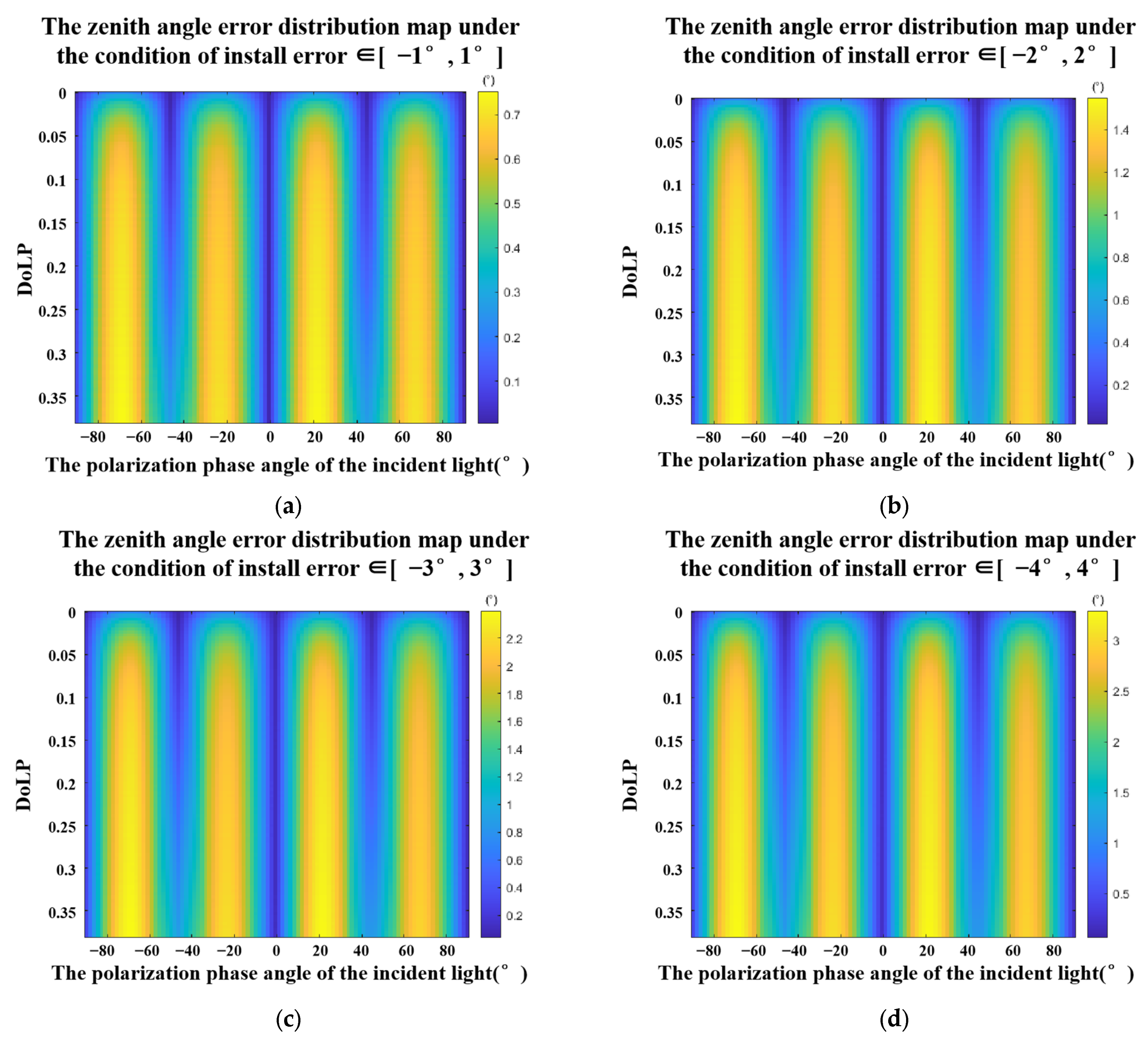
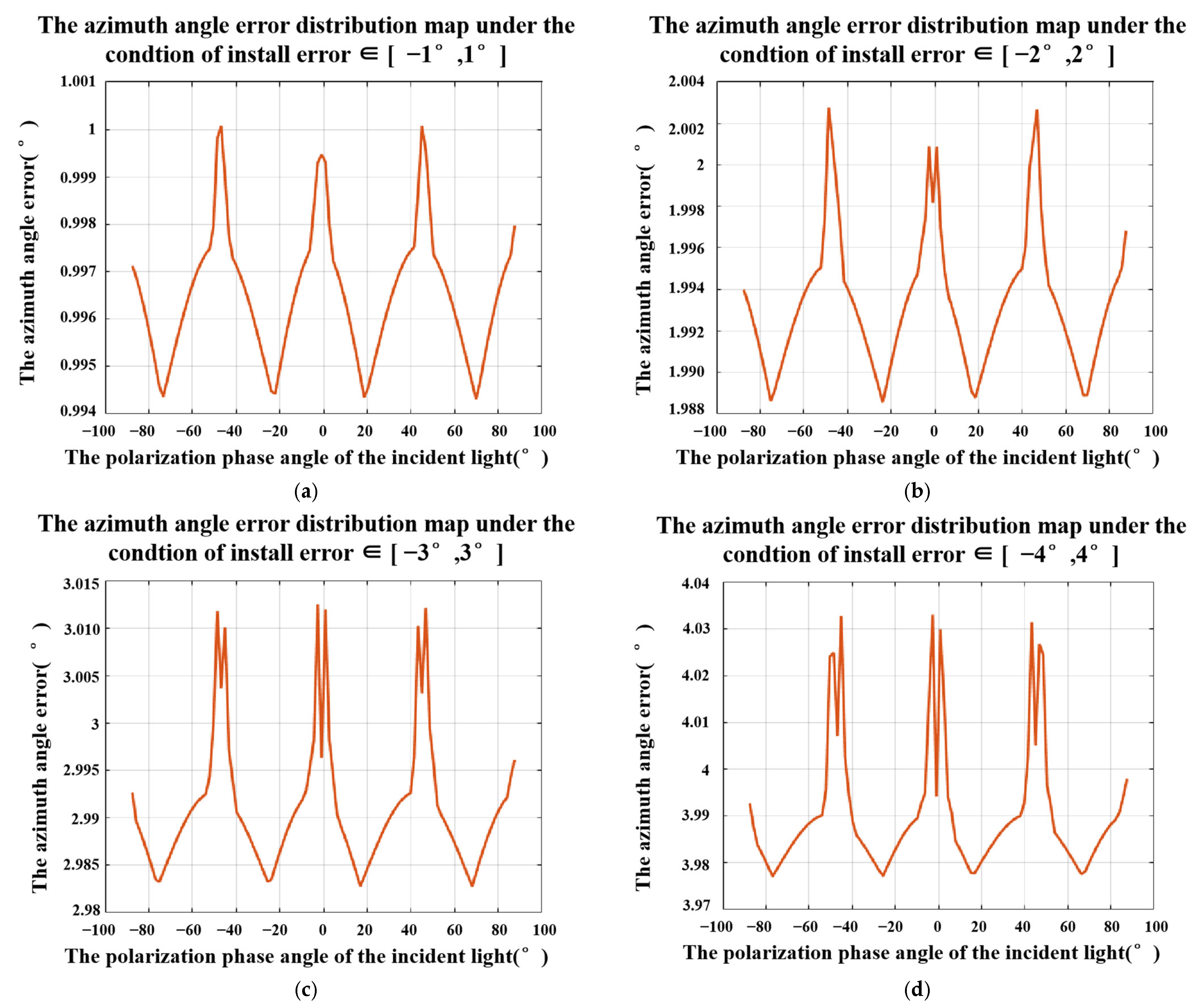
3.2. Influence of Polarizer Installation Error on Polarization 3D Reconstruction Accuracy
3.3. Influence of the Different Noise on Polarization 3D Reconstruction Accuracy
3.3.1. Influence of the Full-Well Capacity on Polarization 3D Reconstruction Accuracy
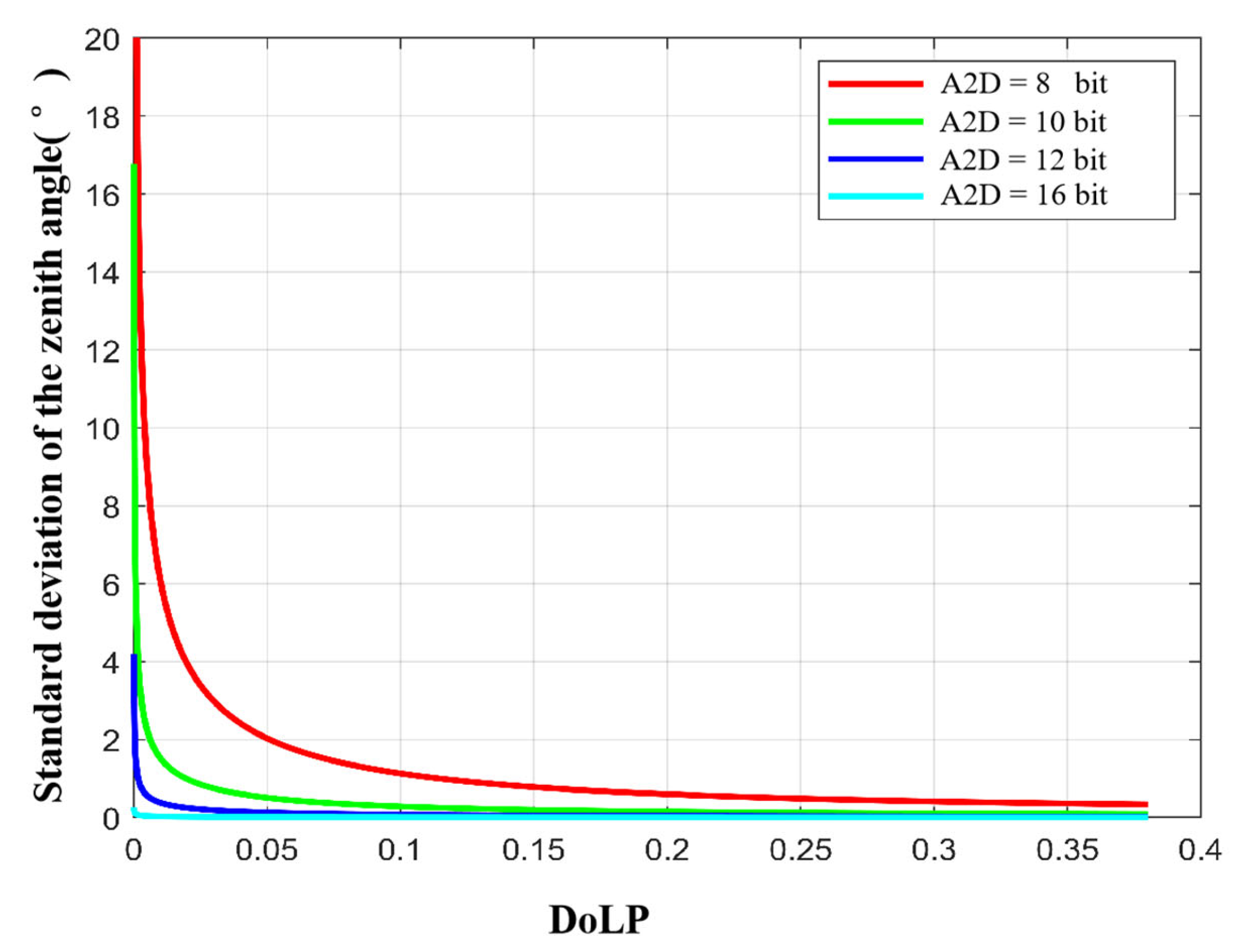
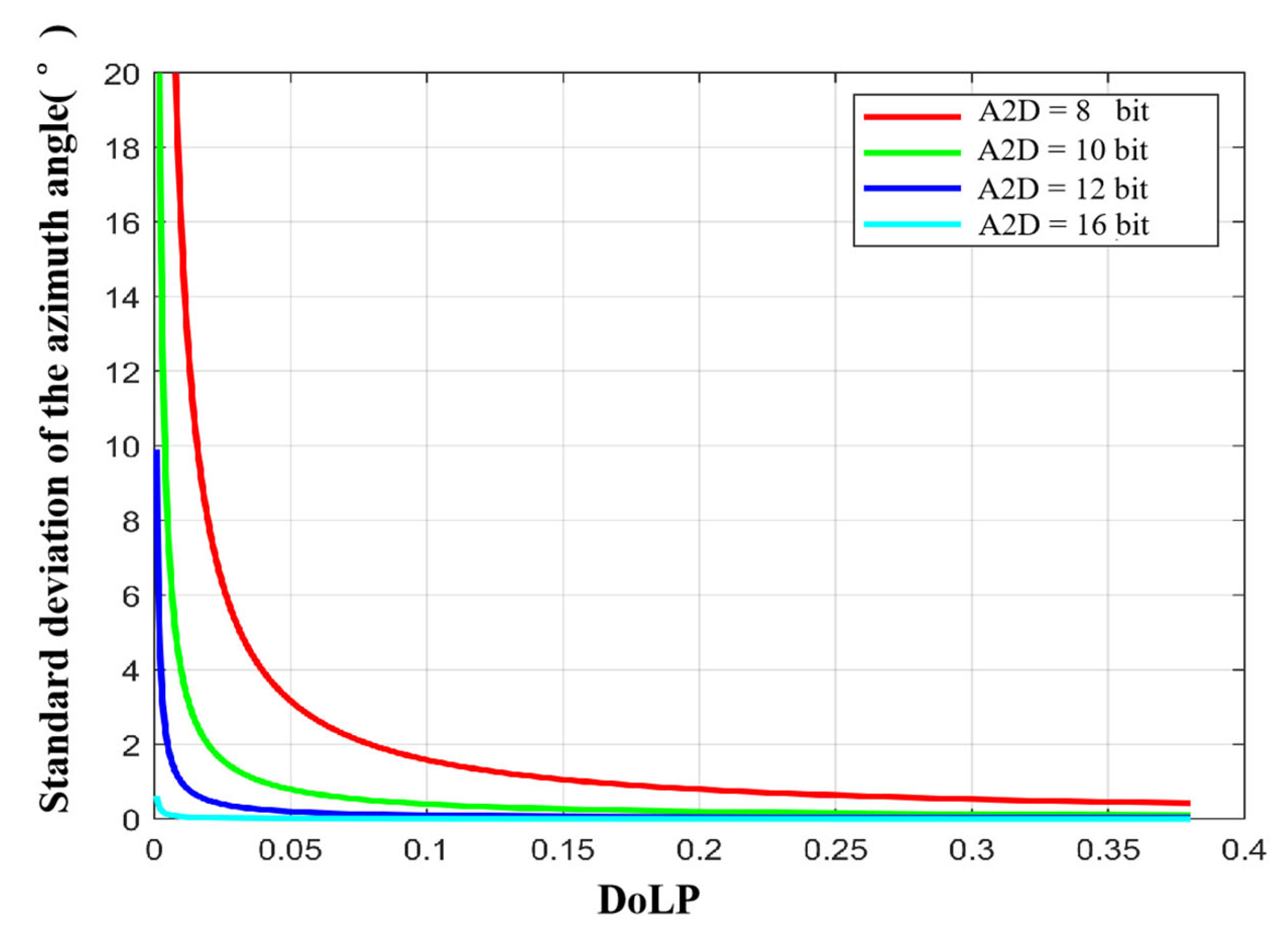
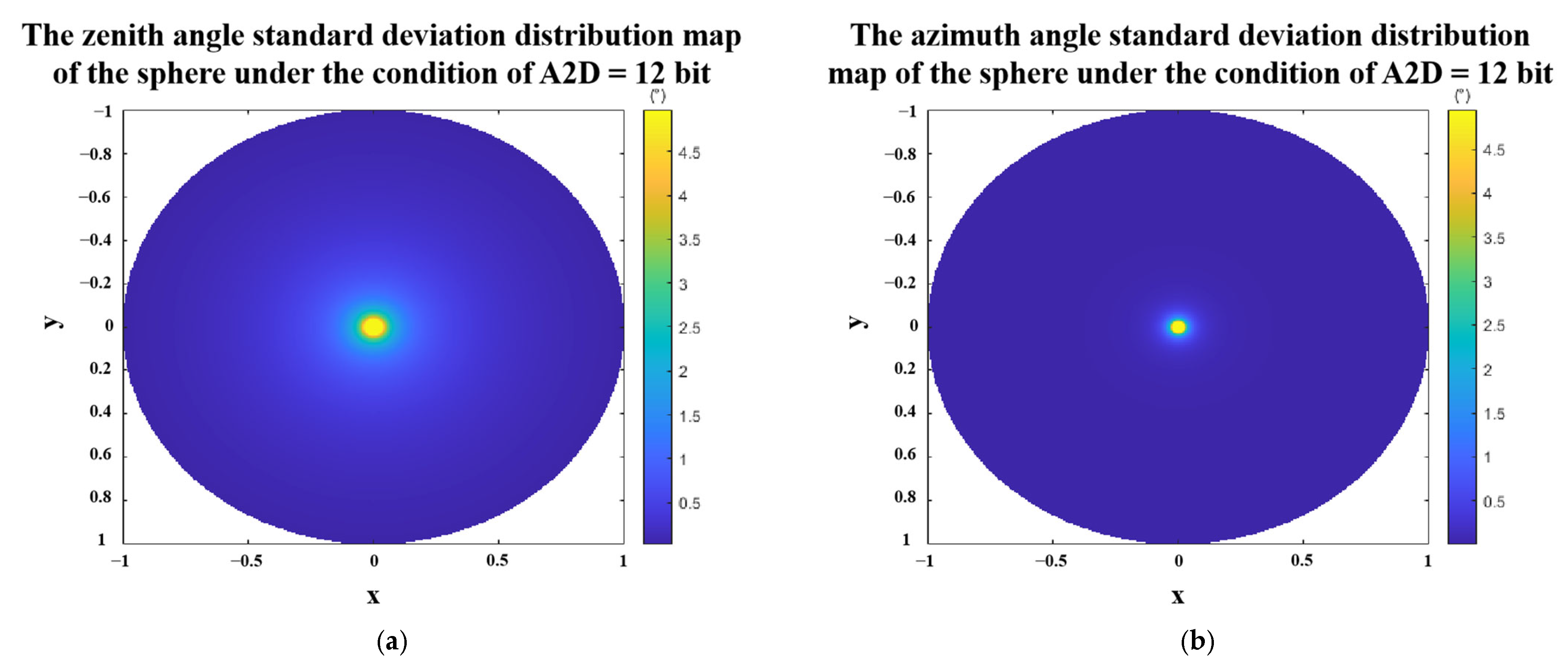
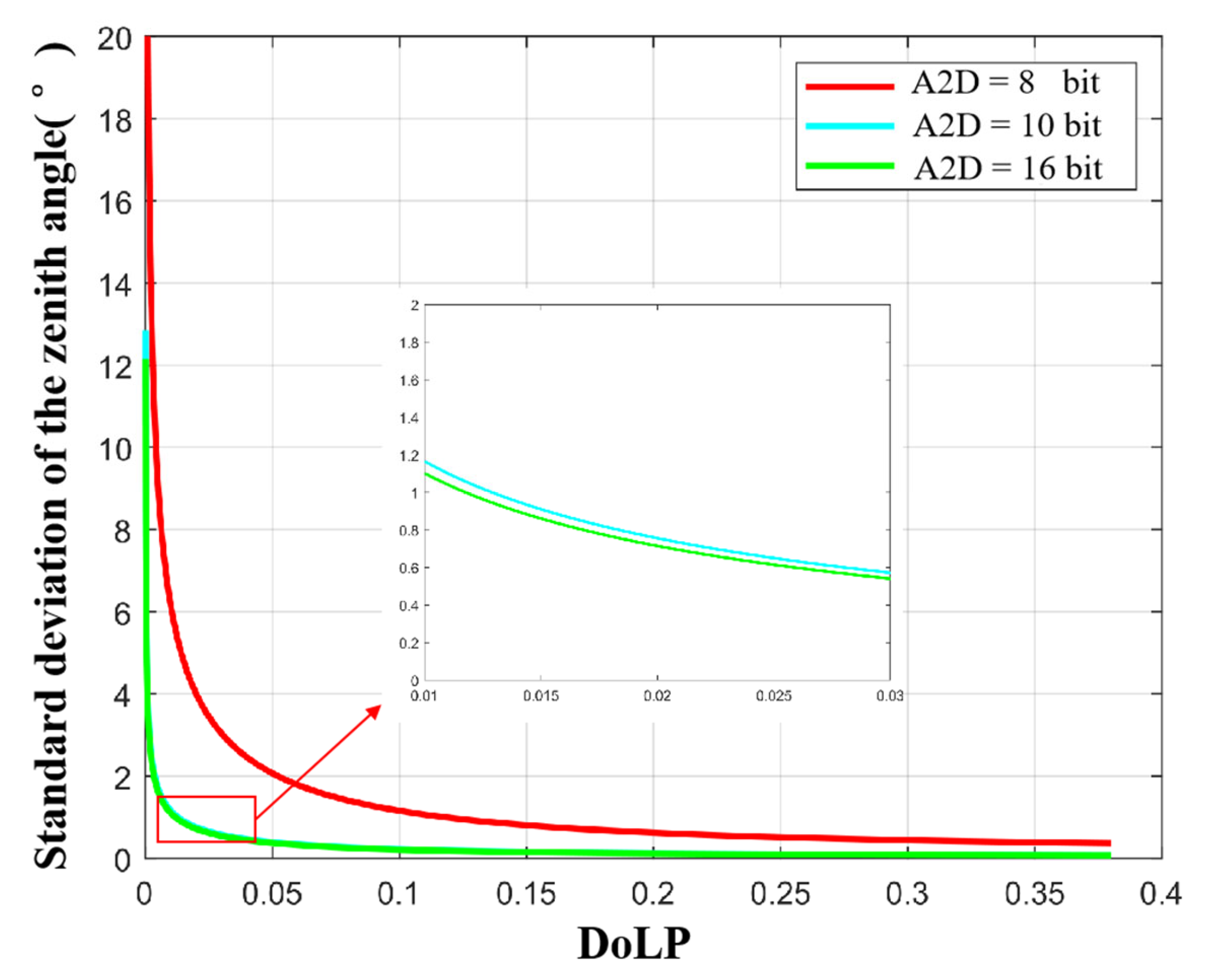
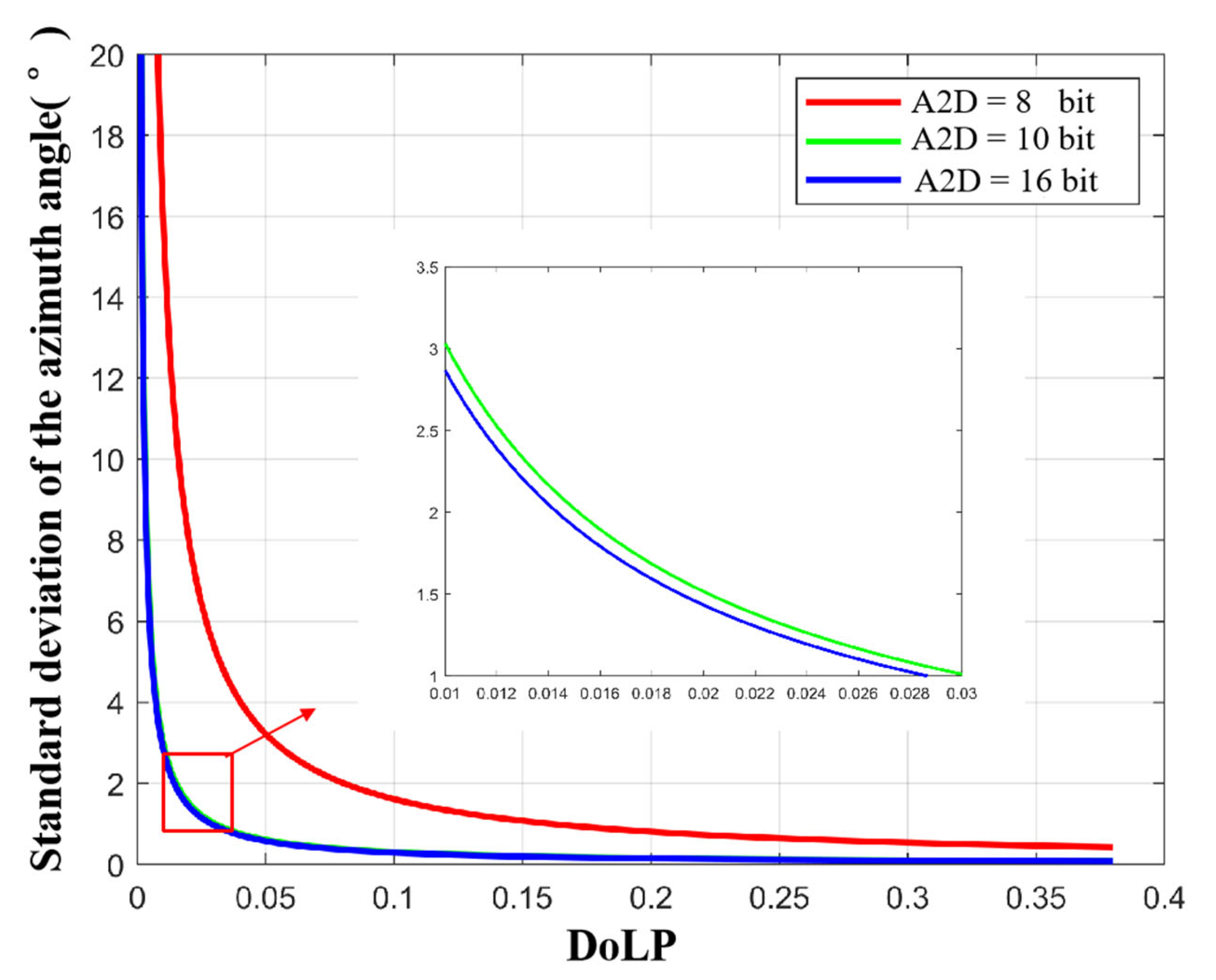
3.3.2. Influence of the A2D Bit Depth on Polarization 3D Reconstruction Accuracy
4. Simulation and Analysis
4.1. Simulation and Analysis of the Influence of ER on Polarization 3D Reconstruction
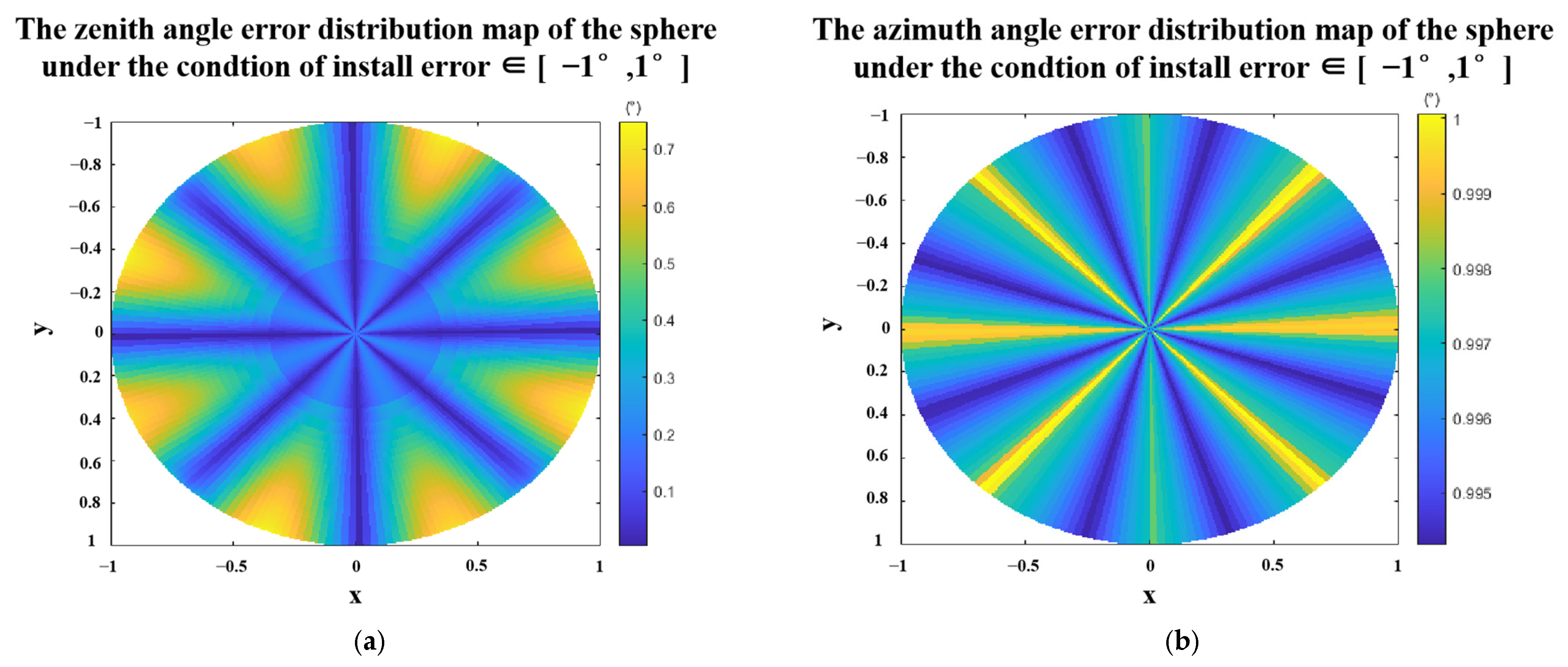
4.2. Simulation and Analysis of the Influence of Installation Error on Polarization 3D Reconstruction
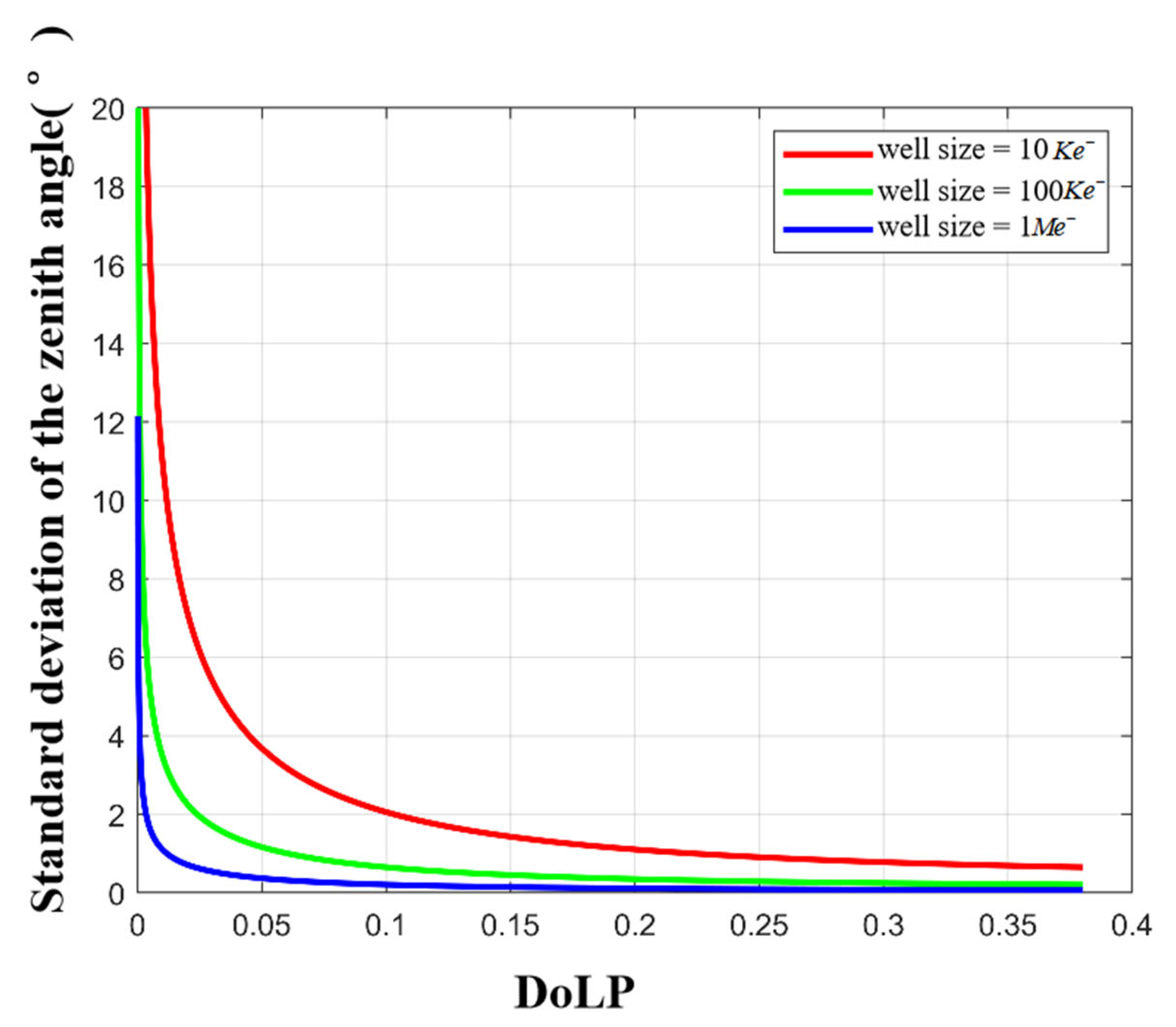
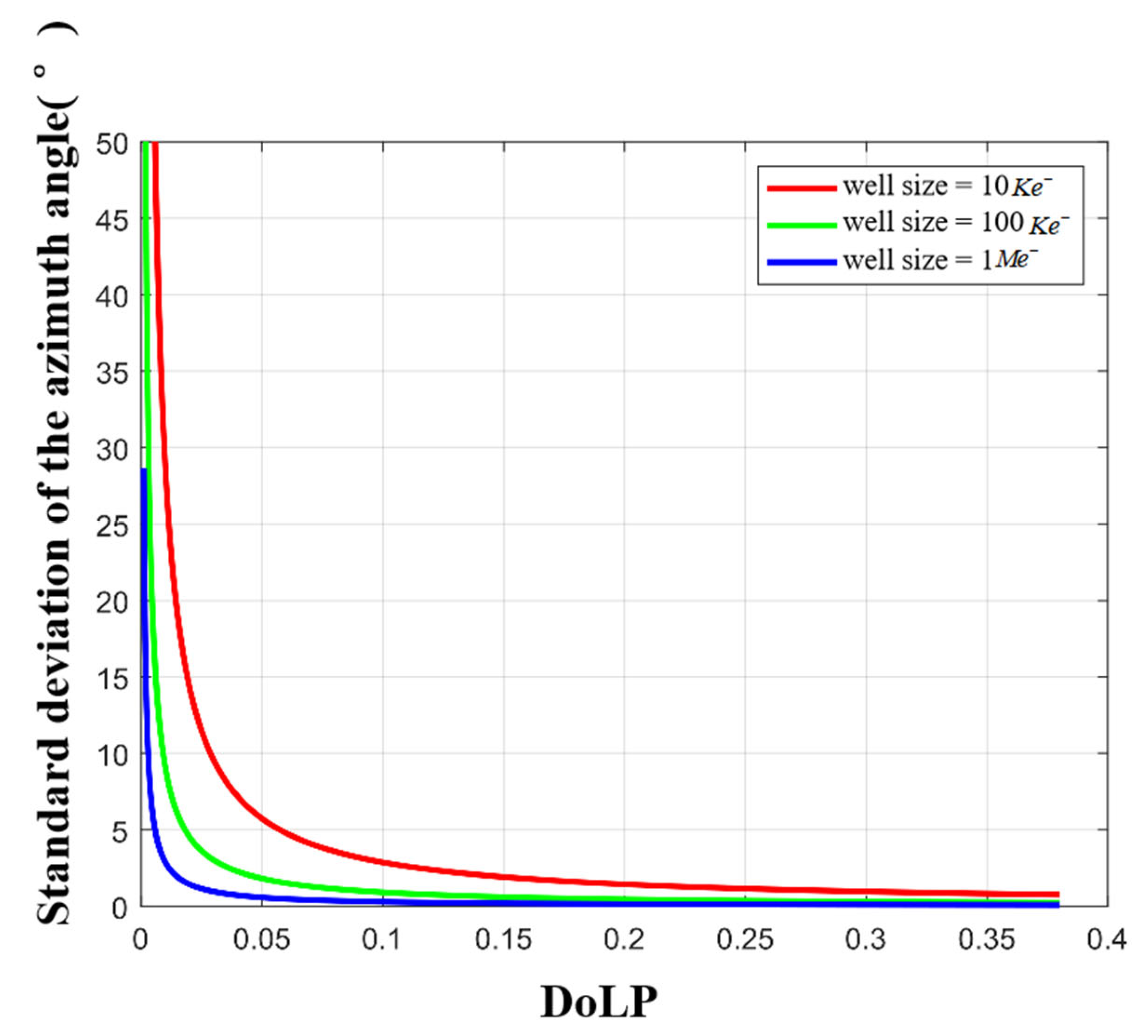
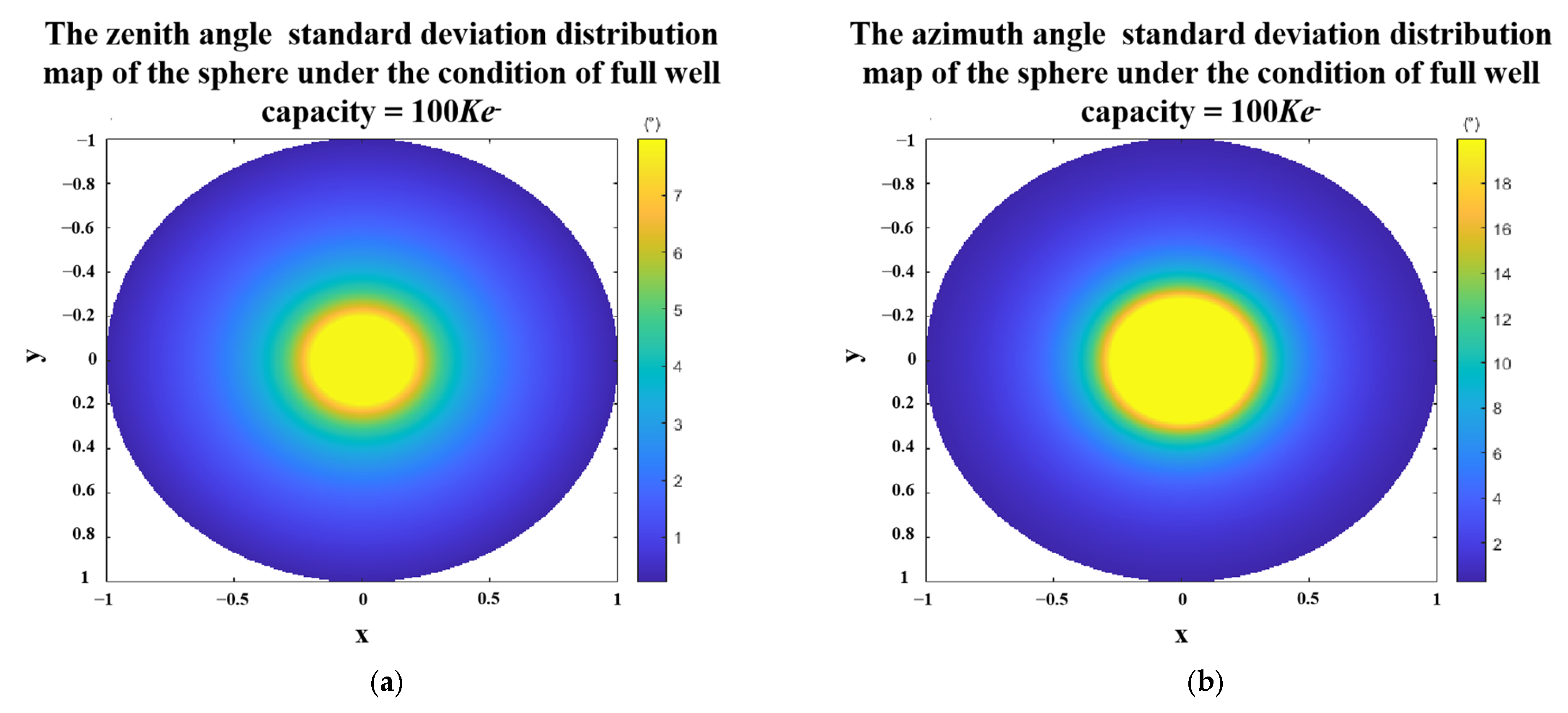
4.3. Simulation and Analysis of the Influence of Full-Well Size Capacity on Polarization 3D Reconstruction
4.4. Simulation and Analysis of the A2D Bit Depth Influence on Polarization 3D Reconstruction
5. Model Evaluation and Experiment
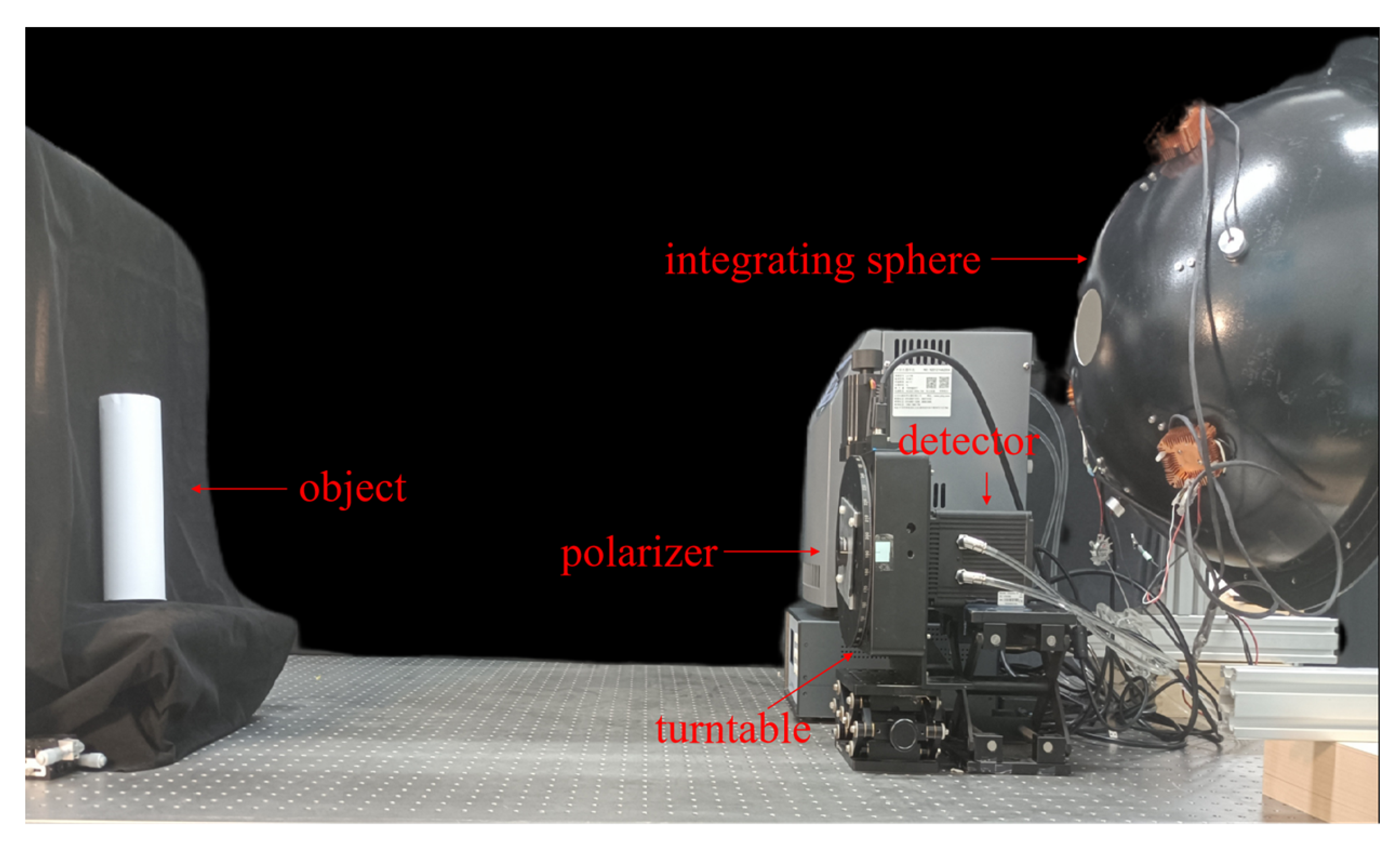
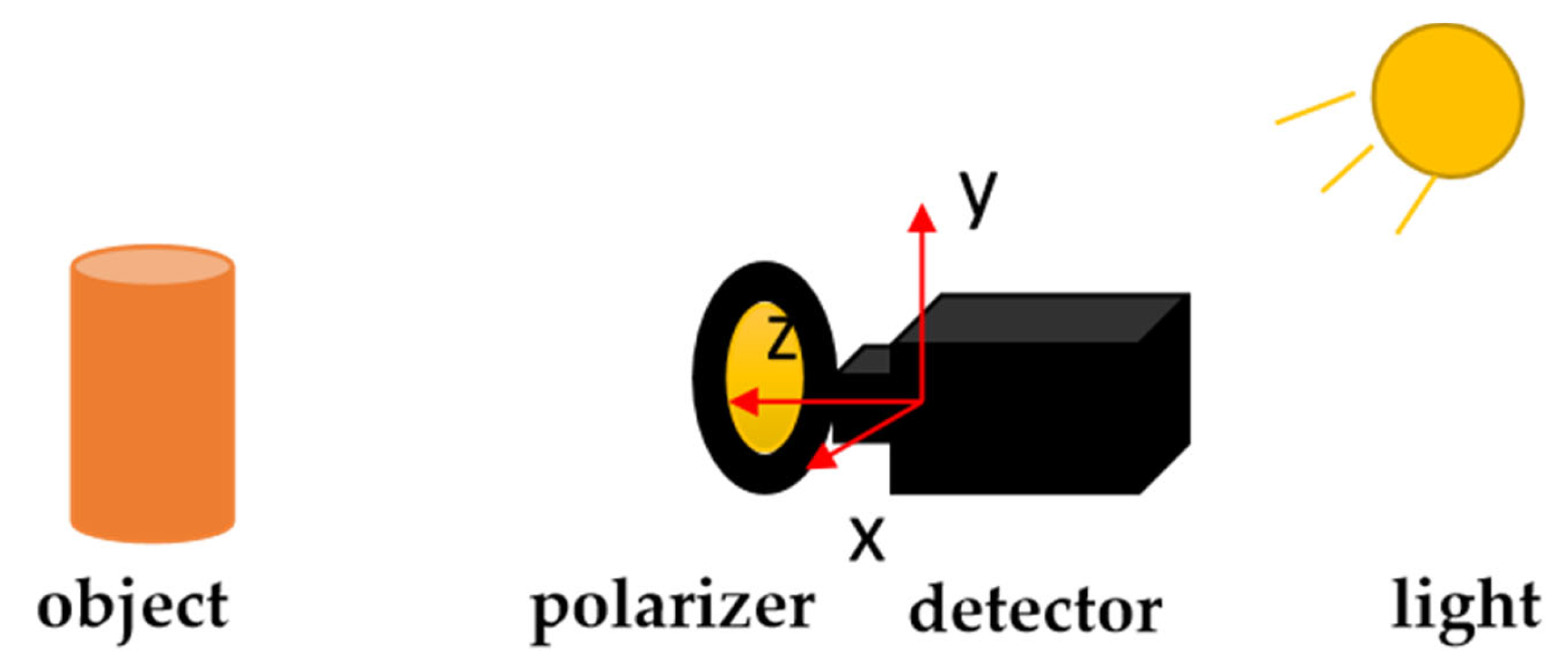
5.1. Establishment of the Experimental Platform
5.2. Evaluation of Error Model Accuracy
5.2.1. Evaluation of the Effect of the Polarizer Extinction Ratio (ER) on the Polarization 3D Imaging Model
5.2.2. Evaluation of the Effect of Installation Error on the Polarization 3D Imaging Model
5.2.3. Evaluation of the Effect of Full-Well Capacity on the Polarization 3D Imaging Model
5.2.4. Evaluation of the Effect of A2D Bit Depth on the Polarization 3D Imaging Model
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mathavan, S.; Kamal, K.; Rahman, M. A review of three-dimensional imaging technologies for pavement distress detection and measurements. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2353–2362. [Google Scholar] [CrossRef]
- Gustavson, R.L.; Davis, T.E. Diode laser radar for low-cost weapon guidance. Laser Radar VII Adv. Technol. Appl. 1992, 1633, 21–32. [Google Scholar]
- Mheen, B.; Shim, J.S.; Oh, M.S.; Song, J.; Song, M.; Choi, G.D.; Seo, H.; Kwon, Y.H. High-resolution three-dimensional laser radar with static unitary detector. Electron. Lett. 2014, 50, 313–315. [Google Scholar] [CrossRef]
- Bi, S.; Yuan, C.; Liu, C.; Cheng, J.; Wang, W.; Cai, Y. A survey of low-cost 3D laser scanning technology. Appl. Sci. 2021, 11, 3938. [Google Scholar] [CrossRef]
- Cui, B.; Tao, W.; Zhao, H. High-precision 3D reconstruction for small-to-medium-sized objects utilizing line-structured light scanning: A review. Remote Sens. 2021, 13, 4457. [Google Scholar] [CrossRef]
- Castillón, M.; Palomer, A.; Forest, J.; Ridao, P. State of the art of underwater active optical 3D scanners. Sensors 2019, 19, 5161. [Google Scholar] [CrossRef]
- Liu, F.; Yan, M.; Li, X. Advances in diffused polarization-based three-dimensional imaging technology. Laser Optoelectron. Prog. 2021, 58, 1811015. [Google Scholar]
- Anderson, B.L. Stereovision: Beyond disparity computations. Trends Cogn. Sci. 1998, 2, 214–222. [Google Scholar] [CrossRef]
- Hurt, N.E. Mathematical methods in shape-from-shading: A review of recent results. Acta Appl. Math. 1991, 23, 163–188. [Google Scholar] [CrossRef]
- Ramachandran, V.S. Perception of shape from shading. Nature 1988, 331, 163–166. [Google Scholar] [CrossRef]
- Koshikawa, K. A polarimetric approach to shape understanding of glossy objects. Adv. Robot. 1979, 2, 190. [Google Scholar]
- Wolff, L.B. Surface orientation from polarization images. In Proceedings of the Advances in Intelligent Robotics Systems, Cambridge, CA, USA, 2–6 November 1987; pp. 110–121. [Google Scholar]
- Wolff, L.B. Polarization-based material classification from specular reflection. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 1059–1071. [Google Scholar] [CrossRef]
- Ferraton, M.; Stolz, C.; Meriaudeau, F. Optimization of a polarization imaging system for 3D measurements of transparent objects. Opt. Express 2009, 17, 21077–21082. [Google Scholar] [CrossRef]
- Morel, O.; Gorria, P. Polarization imaging for 3D inspection of highly reflective metallic objects. Opt. Spectrosc. 2006, 101, 11–17. [Google Scholar] [CrossRef]
- Sohaib, A.; Farooq, A.; Ahmed, J.; Smith, L.; Smith, M. 3D reconstruction of concave surfaces using polarisation imaging. J. Mod. Opt. 2015, 62, 927–932. [Google Scholar] [CrossRef]
- Partridge, M.; Saull, R. Three-dimensional surface reconstruction using emission polarization. In Proceedings of the Satellite Remote Sensing II, Paris, France, 25–28 September 1995; pp. 92–103. [Google Scholar]
- Atkinson, G.A.; Hancock, E.R. Recovery of surface orientation from diffuse polarization. IEEE Trans. Image Process. 2006, 15, 1653–1664. [Google Scholar] [CrossRef]
- Atkinson, G.A.; Hancock, E.R. Surface reconstruction using polarization and photometric stereo. In Proceedings of the Computer Analysis of Images and Patterns: 12th International Conference, CAIP 2007, Vienna, Austria, 27–29 August 2007; pp. 466–473. [Google Scholar]
- Li, X. Research on the Key Technology of Polarization 3D Imaging of Complex Scences. Ph.D. Thesis, Xidian University, Xi’an, China, 2021. [Google Scholar]
- Ju, Y.; Jian, M.; Guo, S.; Wang, Y.; Zhou, H.; Dong, J. Incorporating lambertian priors into surface normals measurement. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Santo, H.; Samejima, M.; Sugano, Y.; Shi, B.; Matsushita, Y. Deep photometric stereo network. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 501–509. [Google Scholar]
- Zhang, R.; Tsai, P.-S.; Cryer, J.E.; Shah, M. Shape from shading: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 690–706. [Google Scholar] [CrossRef]
- Mahmoud, A.H.; El-Melegy, M.T.; Farag, A.A. Direct method for shape recovery from polarization and shading. In Proceedings of the 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 1769–1772. [Google Scholar]
- Smith, W.A.; Ramamoorthi, R.; Tozza, S. Linear depth estimation from an uncalibrated, monocular polarisation image. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 109–125. [Google Scholar]
- Kadambi, A.; Taamazyan, V.; Shi, B.; Raskar, R. Depth sensing using geometrically constrained polarization normals. Int. J. Comput. Vis. 2017, 125, 34–51. [Google Scholar] [CrossRef]
- Ba, Y.; Gilbert, A.; Wang, F.; Yang, J.; Chen, R.; Wang, Y.; Yan, L.; Shi, B.; Kadambi, A. Deep shape from polarization. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; pp. 554–571. [Google Scholar]
- Deschaintre, V.; Lin, Y.; Ghosh, A. Deep polarization imaging for 3D shape and SVBRDF acquisition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 15567–15576. [Google Scholar]
- Lei, C.; Qi, C.; Xie, J.; Fan, N.; Koltun, V.; Chen, Q. Shape from polarization for complex scenes in the wild. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 12632–12641. [Google Scholar]
- Miyazaki, D.; Tan, R.T.; Hara, K.; Ikeuchi, K. Polarization-based inverse rendering from a single view. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; p. 982. [Google Scholar]
- Huang, S.; Liu, F.; Han, P.; Li, X.; Li, X.; Shao, X. Surface Normals Correction by Removing Specular Reflection for 3D Polarization Imaging. In Proceedings of the Laser Science, Washington, DC, USA, 16–20 September 2018; p. JTu2A.135. [Google Scholar]
- Li, X.; Liu, F.; Han, P.; Zhang, S.; Shao, X. Near-infrared monocular 3D computational polarization imaging of surfaces exhibiting nonuniform reflectance. Opt. Express 2021, 29, 15616–15630. [Google Scholar] [CrossRef]
- Béniere, A.; Goudail, F.; Alouini, M.; Dolfi, D. Estimation precision of degree of polarization in the presence of signal-dependent and additive Poisson noises. J. Eur. Opt. Soc. Rapid Publ. 2008, 3. [Google Scholar] [CrossRef]
- Bénière, A.; Goudail, F.; Alouini, M.; Dolfi, D. Precision of degree of polarization estimation in the presence of additive Gaussian detector noise. Opt. Commun. 2007, 278, 264–269. [Google Scholar] [CrossRef]
- Foreman, M.R.; Romero, C.M.; Török, P. A priori information and optimisation in polarimetry. Opt. Express 2008, 16, 15212–15227. [Google Scholar] [CrossRef]
- Goudail, F.; Bénière, A. Estimation precision of the degree of linear polarization and of the angle of polarization in the presence of different sources of noise. Appl. Opt. 2010, 49, 683–693. [Google Scholar] [CrossRef]
- Jones, M.W.; Persons, C.M. Performance predictions for micro-polarizer array imaging polarimeters. In Proceedings of the Optical Engineering + Application, San Diego, CA, USA, 26–30 August 2007; pp. 51–61. [Google Scholar]
- Perkins, R.; Gruev, V. Signal-to-noise analysis of Stokes parameters in division of focal plane polarimeters. Opt. Express 2010, 18, 25815–25824. [Google Scholar] [CrossRef]
- Réfrégier, P.; Goudail, F.; Roux, N. Estimation of the degree of polarization in active coherent imagery by using the natural representation. JOSA A 2004, 21, 2292–2300. [Google Scholar] [CrossRef]
- Collett, E. Field Guide to Polarization; SPIE: Bellingham, WA, USA, 2005. [Google Scholar]
- Frankot, R.T.; Chellappa, R. A method for enforcing integrability in shape from shading algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 439–451. [Google Scholar] [CrossRef]
- Bevington, P.R.; Robinson, D.K.; Blair, J.M.; Mallinckrodt, A.J.; McKay, S. Data reduction and error analysis for the physical sciences. Comput. Phys. 1993, 7, 415–416. [Google Scholar] [CrossRef]
- Sony. Polarization Image Sensor with Four-Directional On-Chip Polarizer and Global Shutter Function. Available online: https://www.sony-semicon.co.jp/e/products/IS/industry/product/polarization.html (accessed on 14 February 2022).
- James, F. Monte Carlo theory and practice. Rep. Prog. Phys. 1980, 43, 1145. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | Yunhao [27] | Smith [25] | Mahmoud [24] | Miyazaki [30] |
|---|---|---|---|---|
| Box | 23.31° | 31.00° | 41.51° | 45.47° |
| Dragon | 22.55° | 49.16° | 70.72° | 57.72° |
| Father Christmas | 13.50° | 39.68° | 39.20° | 41.50° |
| Flamingo | 20.19° | 36.05° | 47.98° | 45.58° |
| Horse | 22.27° | 55.87° | 50.55° | 51.34° |
| Vase | 10.32° | 36.88° | 44.23° | 43.47° |
| Whole set | 18.52° | 41.44° | 49.03° | 47.51° |
| Zenith Angle, θ (°) | |
|---|---|
| 0.100 | 60.8439 |
| 0.095 | 59.7993 |
| 0.010 | 23.5136 |
| 0.005 | 16.8986 |
| Variable | Theoretical Variance | Monte Carlo Variance |
|---|---|---|
| e0 | 470,000 | 469,880 |
| e45 | 551,961 | 552,000 |
| e90 | 530,000 | 531,001 |
| e135 | 448,038 | 447,607 |
| S0 | 1,000,000 | 999,290 |
| S1 | 1,000,000 | 999,690 |
| S2 | 1,039,200 | 1,000,500 |
| 0.000001014 | 0.000001007 | |
| θ(°) | 0.000532430 | 0.000525900 |
| Camera Parameters | name | dhyana v2 |
| resolution | 2048 × 2048 | |
| Imaging distance | 0.9–2.8 m | |
| Object | object size | Height: 212 mm Diameter: 62 mm |
| distance from detector | 1 m | |
| object type | similar to Lambertian | |
| Beam | device name | integrating sphere |
| The aperture of the integrating sphere | 100 mm | |
| Internal dimensions | Diameter: 500 mm | |
| Internal material | PEFT | |
| reflectivity | >98% (400–650 nm) >95% (300–800 nm) |
| Point ID | Actual θ (°) | Exposure Time (ms) | Electrons (Ke−) | Difference (°) | ||
|---|---|---|---|---|---|---|
| A | 60 | 300 | 35 | 1.1395 | 1.4429 | 0.3034 |
| 250 | 33 | 1.1736 | 1.5664 | 0.3928 | ||
| 200 | 29 | 1.2519 | 1.6782 | 0.4263 | ||
| B | 40 | 300 | 68 | 1.9410 | 2.3342 | 0.3932 |
| 250 | 57 | 2.1201 | 2.6128 | 0.4927 | ||
| 200 | 49 | 2.2866 | 2.8533 | 0.5667 | ||
| C | 20 | 300 | 94 | 4.3827 | 4.9181 | 0.5354 |
| 250 | 78 | 4.8113 | 5.5123 | 0.7010 | ||
| 200 | 65 | 5.2706 | 6.0344 | 0.7638 |
| Point ID | Actual ψ (°) | Exposure Time (ms) | Electrons (Ke−) | Difference (°) | ||
|---|---|---|---|---|---|---|
| A | 0 | 300 | 35 | 1.5969 | 1.8324 | 0.2355 |
| 250 | 33 | 1.6446 | 1.9821 | 0.3375 | ||
| 200 | 29 | 1.7543 | 2.2242 | 0.4699 | ||
| B | 0 | 300 | 68 | 3.3393 | 4.0117 | 0.6724 |
| 250 | 57 | 3.6473 | 4.1237 | 0.4764 | ||
| 200 | 49 | 3.9339 | 4.3123 | 0.3784 | ||
| C | 0 | 300 | 94 | 13.1608 | 14.0091 | 0.8483 |
| 250 | 78 | 14.4477 | 14.9986 | 0.5509 | ||
| 200 | 65 | 15.8268 | 16.7839 | 0.9571 |
| Point ID | Actual θ (°) | Electrons (Ke−) | A2D bit Depth | Difference (°) | ||
|---|---|---|---|---|---|---|
| A | 60 | 9.8 | 8 | 2.4660 | 2.9123 | 0.4463 |
| 12 | 2.1547 | 2.4134 | 0.2587 | |||
| B | 40 | 9.8 | 8 | 5.8550 | 6.2113 | 0.3563 |
| 12 | 5.1159 | 5.3178 | 0.2019 | |||
| C | 20 | 9.8 | 8 | 15.5437 | 16.009 | 0.4653 |
| 12 | 13.5815 | 13.904 | 0.3225 |
| Point ID | Actual ψ (°) | Electrons (Ke−) | A2D%bit Depth (bit) | Difference (°) | ||
|---|---|---|---|---|---|---|
| A | 0 | 9.8 | 8 | 3.4556 | 3.9174 | 0.4618 |
| 12 | 3.0194 | 3.5417 | 0.5223 | |||
| B | 0 | 9.8 | 8 | 10.0728 | 11.1219 | 1.0491 |
| 12 | 8.8013 | 9.5416 | 0.7403 | |||
| C | 0 | 9.8 | 8 | 46.6756 | 48.1217 | 1.4461 |
| 12 | 40.7836 | 42.1214 | 1.3378 | |||
| 98 | 12 | 12.9672 | 13.4159 | 0.4487 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, P.; Yao, D.; Ma, T.; Shen, H.; Wang, W.; Wang, Q. Analysis of Polarization Detector Performance Parameters on Polarization 3D Imaging Accuracy. Sensors 2023, 23, 5129. https://doi.org/10.3390/s23115129
Dai P, Yao D, Ma T, Shen H, Wang W, Wang Q. Analysis of Polarization Detector Performance Parameters on Polarization 3D Imaging Accuracy. Sensors. 2023; 23(11):5129. https://doi.org/10.3390/s23115129
Chicago/Turabian StyleDai, Pengzhang, Dong Yao, Tianxiang Ma, Honghai Shen, Weiguo Wang, and Qingyu Wang. 2023. "Analysis of Polarization Detector Performance Parameters on Polarization 3D Imaging Accuracy" Sensors 23, no. 11: 5129. https://doi.org/10.3390/s23115129
APA StyleDai, P., Yao, D., Ma, T., Shen, H., Wang, W., & Wang, Q. (2023). Analysis of Polarization Detector Performance Parameters on Polarization 3D Imaging Accuracy. Sensors, 23(11), 5129. https://doi.org/10.3390/s23115129