
Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns


Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Location | Method | Sample | Foot-Strike | Speed | Surface | Placement | Signals | Sampling Frequency | Events | Ground Truth | Sync |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Shank | Mizrahi [36] | n = 14 (14 M) Healthy | NR | 3.5 ± 0.2 m/s | Treadmill | Tibial tuberosity | 1667 Hz | IC | None | N/A | |
| Mercer [27] | n = 10 (10 M) Healthy | NR | 3.1–3.8 m/s | Treadmill | Anteromedial distal tibia | 1000 Hz | IC, TC | None | N/A | ||
| Purcell [28] | n = 6 Healthy | NR | SS jog, run, and sprint | Overground | Anteromedial distal tibia | 250 Hz | IC, TC | Forceplate 1000 Hz | TTL pulse | ||
| Greene/McGrath [29,45] | n = 5 (4 M; 1 F) Healthy | RF | 0.6–3.3 m/s | Treadmill | Anterior aspect of mid shank | 102.4 Hz | IC, TC | MoCap 200 Hz | TTL pulse | ||
| Aminian/ O’Donovan [35,46] | n = 1 (1 M) Healthy | NR | SS jog | Overground | Shank | 102.4 Hz | IC, TC | MoCap 200 Hz | TTL pulse | ||
| Sinclair [37] | n = 16 (11 M; 5 F) | RF | 4.0 ± 0.2 m/s | Overground | Anteromedial distal tibia | 1000 Hz | IC, TC | Forceplate 1000 Hz | Synchronous recording | ||
| Whelan [30] | n = 7 (3 M; 4 F) National and international sprinters | NR | ≤50% max effort | Overground | Anteromedial mid-tibia | 148.2 Hz | IC | Forceplate 1000 Hz | TTL pulse | ||
| Norris [31] | n = 6 (1 M; 5 F) Recreational | NR | SS half-marathon training | Overground | Anteromedial distal tibia | 204.8 Hz | IC | None | N/A | ||
| Schmidt [38] | n = 12 (10 M; 2 F) Track and field athletes | NR | SS sprint | Overground | Lateral distal tibia | 1000 Hz | IC, TC | Photocell | NR | ||
| Aubol [39] | n = 19 (9 M; 10 F) ≥16.1 km/wk Injury free | RF | 3.0 ± 0.2 m/s | Overground | Anteromedial distal tibia | 1000 Hz | IC | Forceplate 1000 Hz | Synchronous recording | ||
| Fadillioglu [40] | n = 13 (13 M) Injury free | NR | SS walking and running | Overground | Leg | 1500 Hz | IC, TC | Forceplate 1000 Hz | TTL pulse | ||
| Bach [43] | n = 21 (13 M; 8 F) Healthy | NR | 2.2 ± 0.1 m/s | Treadmill | Anteromedial proximal tibia | 142.9 Hz | IC, TC | Forceplate 1000 Hz | NR | ||
| Sacrum/Lower back | Auvinet [32] | n = 7 (7 M) “top-level” | RF | 5.2 ± 0.1 m/s | Overground | Lumbar spine | 100 Hz | IC, TC, RL | MoCap 200 Hz | Photoflash | |
| Lee [33] | n = 10 (6 M; 4 F) National standard runners | NR | 2.8–5.3 m/s | Treadmill | Sacrum (S1) | 100 Hz | IC, TC, RL | MoCap 100 Hz | Vertical movement | ||
| Wixted [34] | n = 2 Nationally ranked | NR | 5.9–6.2 m/s | Overground | Lumbar spine (L3–L4) | 500 Hz | IC, TC | Insoles 500 Hz | Synchronous collection | ||
| Bergamini [41] | n = 11 (7 M; 4 F) Amateur and national track and field team | NR | 5.7–10.8 m/s | Overground | Lumbar spine (L1) | 200 Hz | IC, TC | Forceplate/Mocap 200 Hz/300 Hz | Hammer tap/ none | ||
| Benson [44] | n = 54 (29 M; 25 F) Recreational | FF and RF | 2.7–3.6 m/s | Treadmill and Overground | Lower back | 201 Hz | IC, TC, RL | Forceplate 1000 Hz | Vertical jump | ||
| Reenalda [42] | n = 20 (15 M; 5 F) ≥15 km/week; no injuries | FF and RF | 3.1–4.2 m/s | Treadmill | Sacrum | 240 Hz interpolated to 1000 Hz | IC | Forceplate 1000 Hz | x-correlated MoCap |
2. Materials and Methods
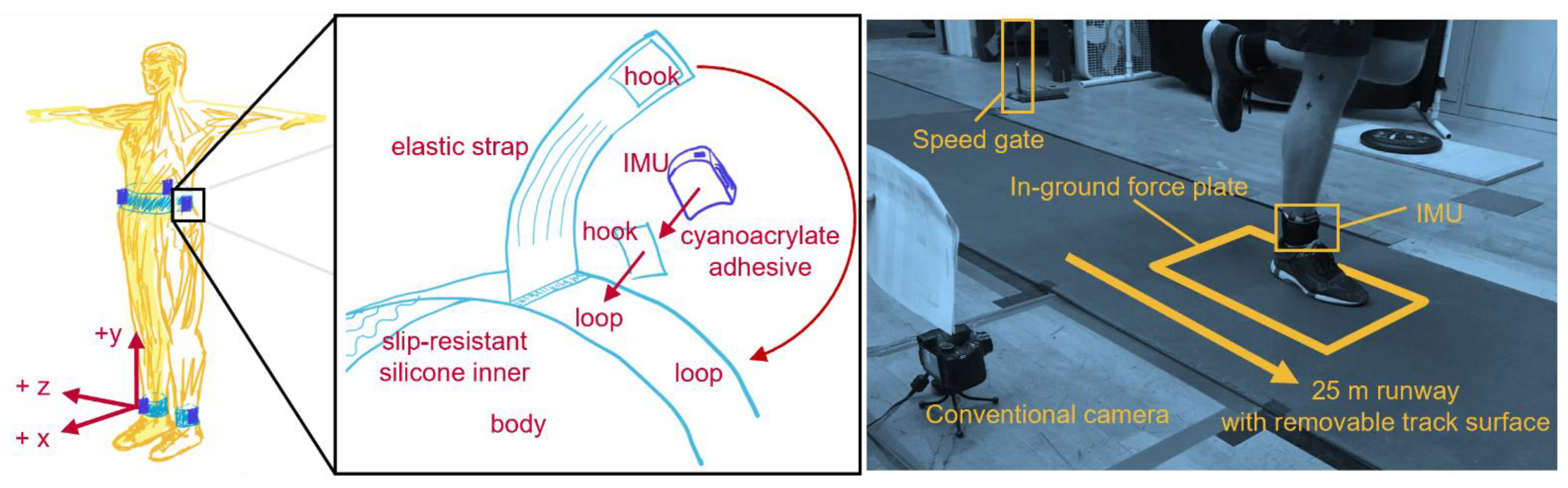
2.1. IMU Calibration
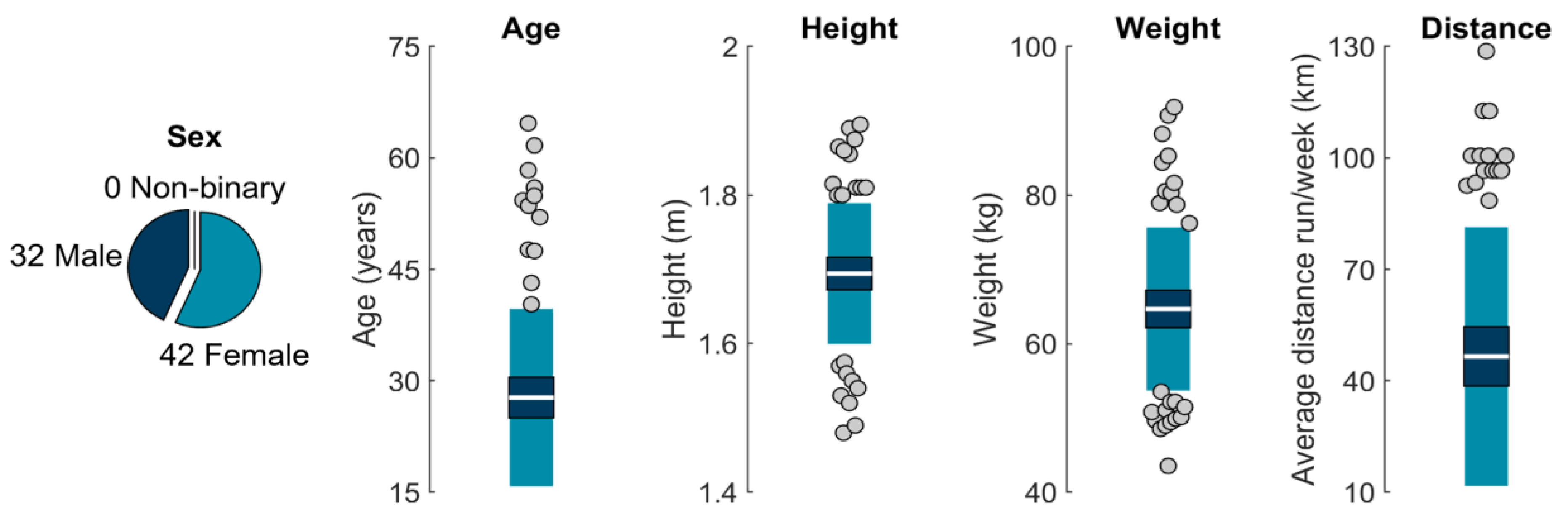
2.2. Participants
2.3. Protocol
2.4. Data Processing
2.5. Analysis
3. Results
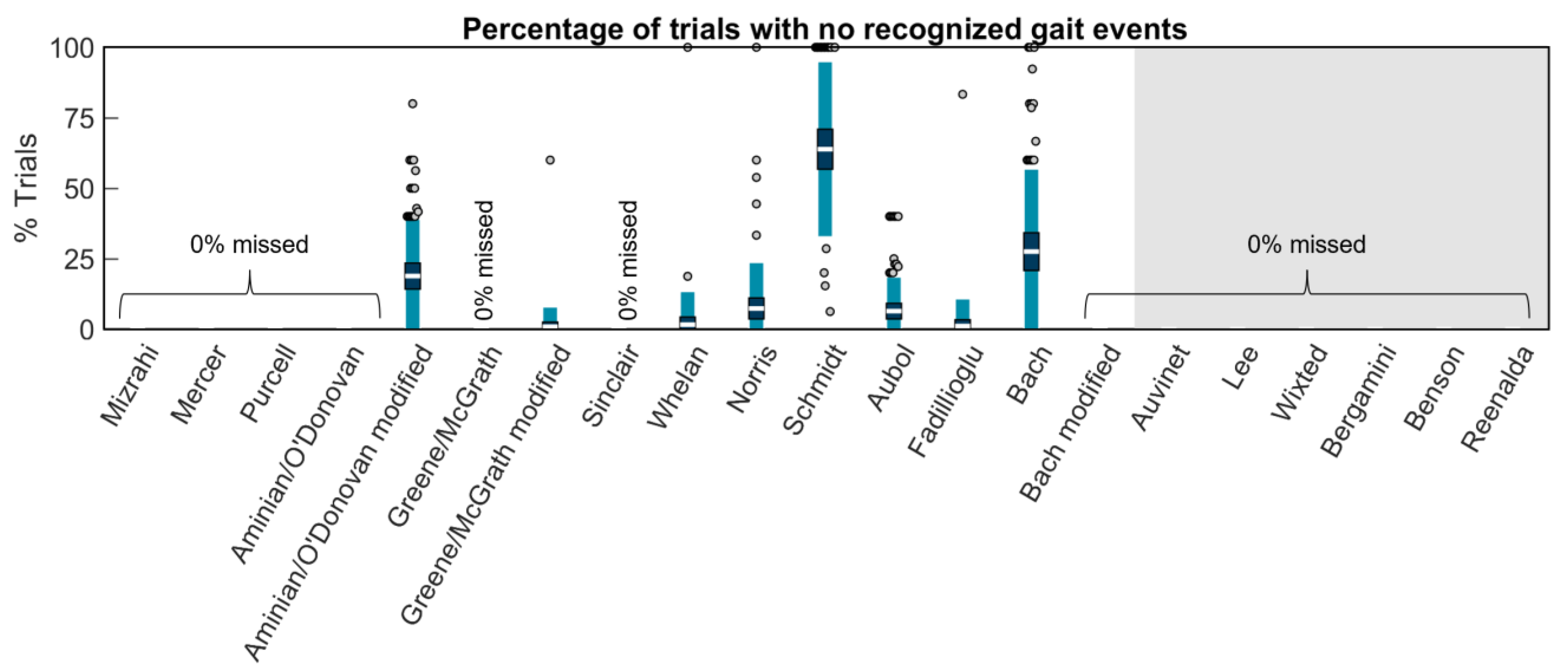
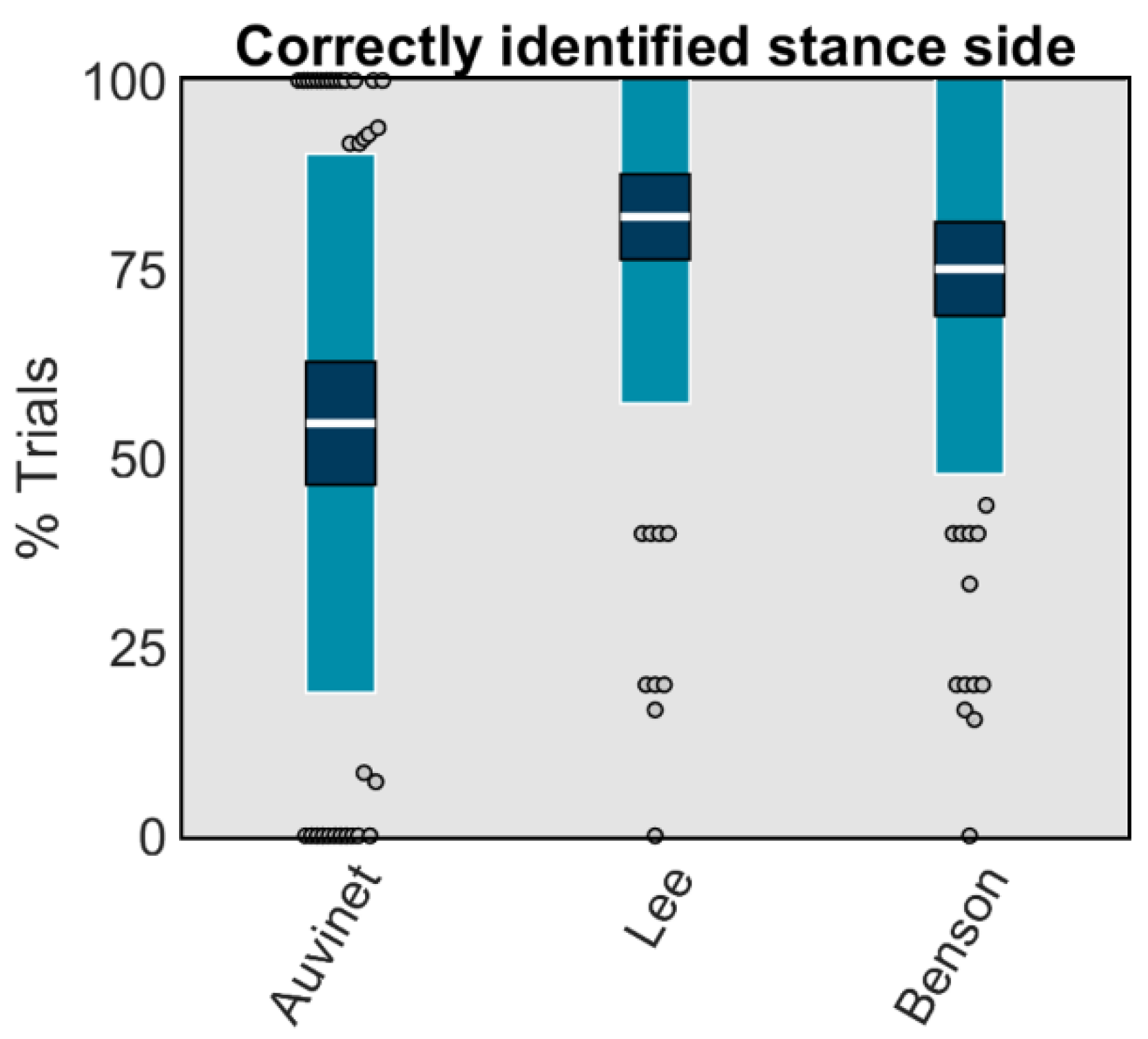
3.1. Failure to Identify Gait Events or Step Side
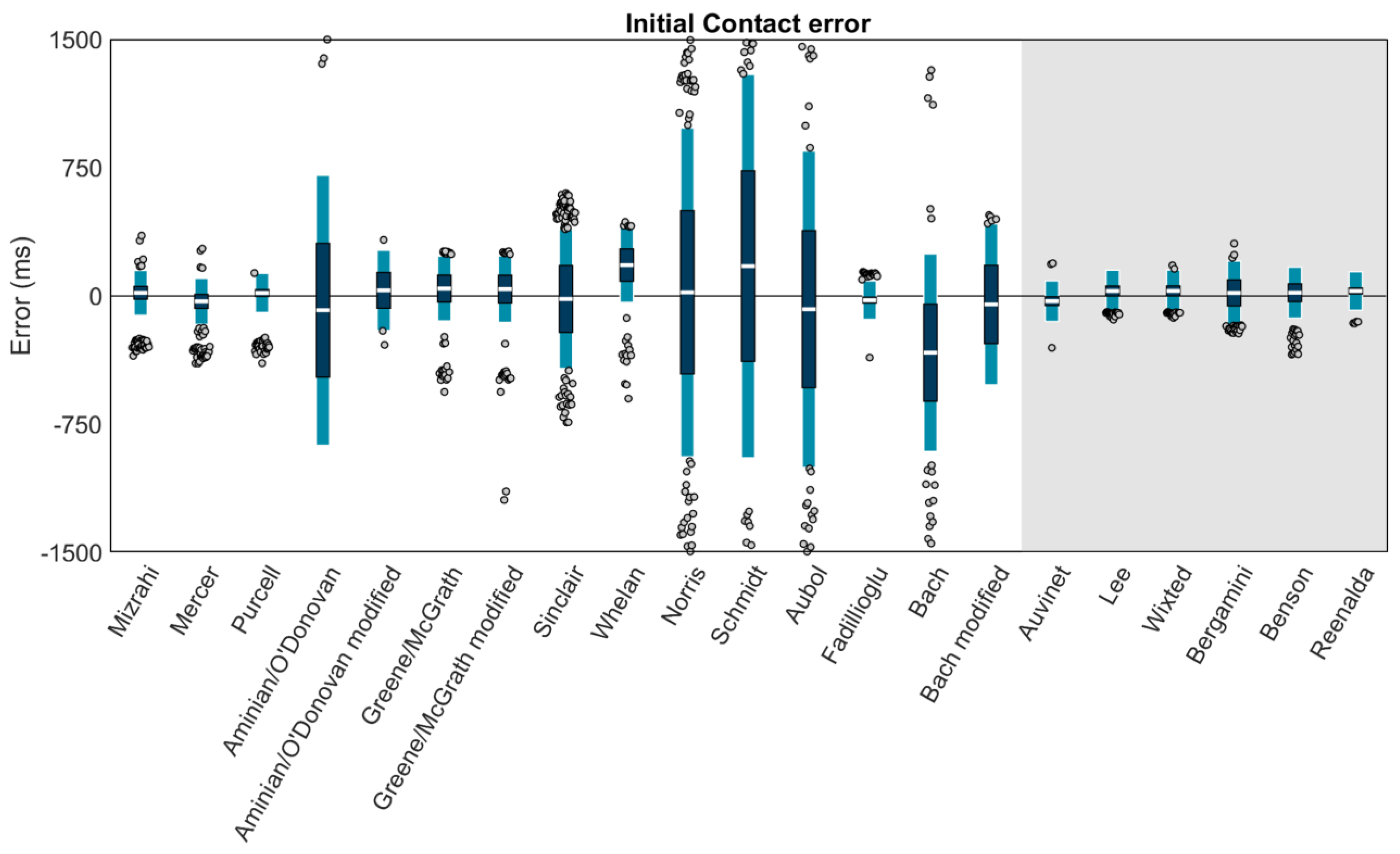
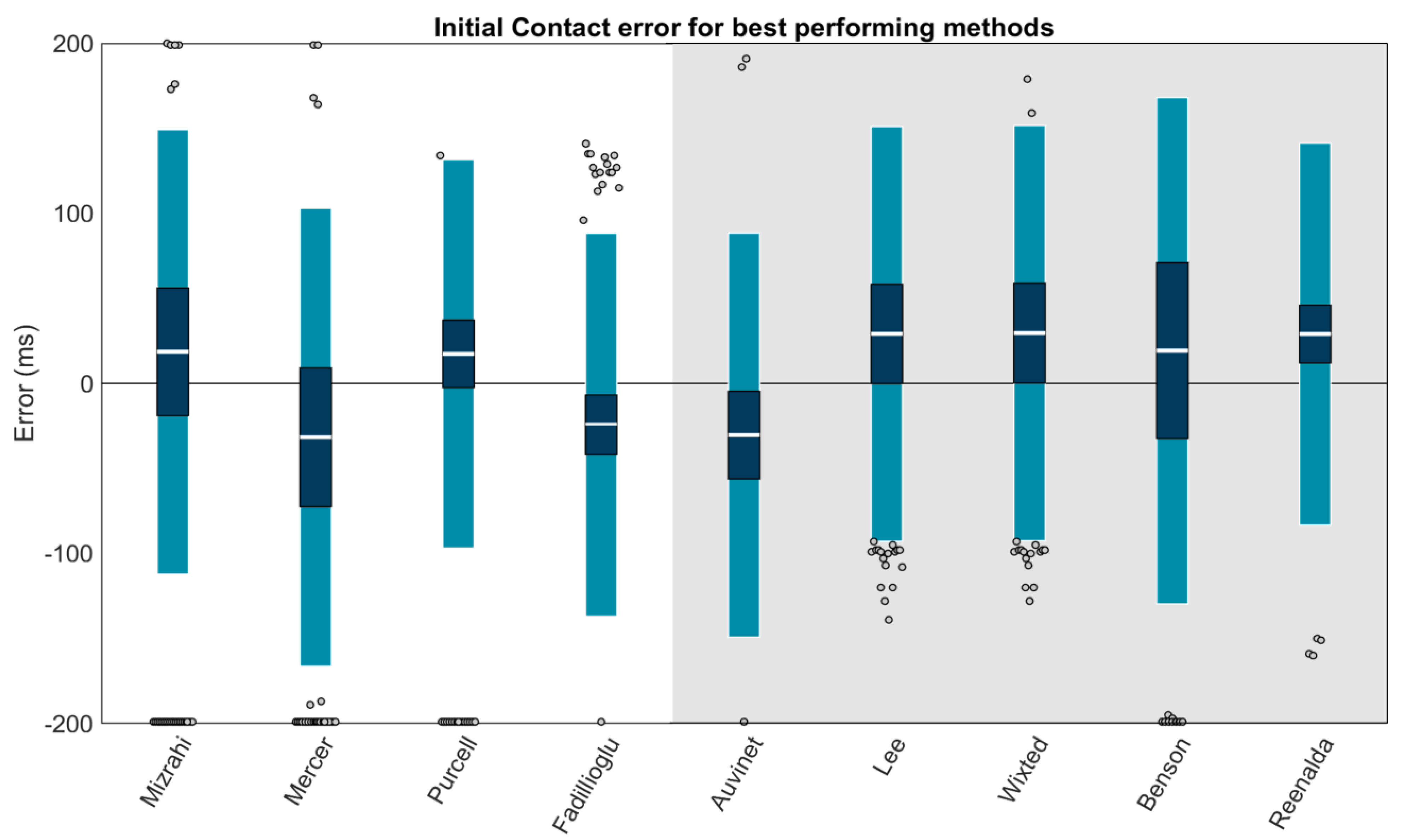
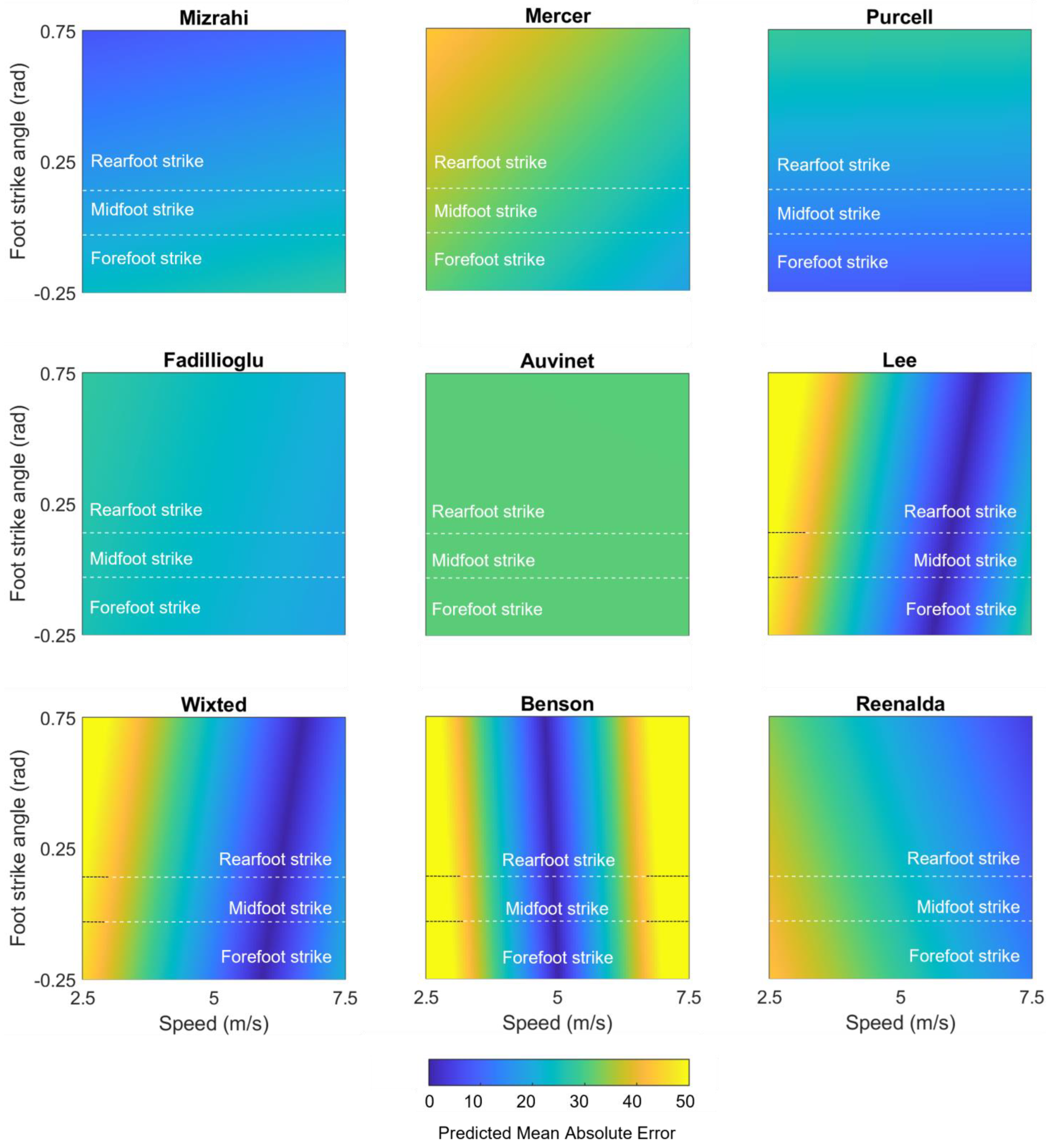
3.2. Initial Contact
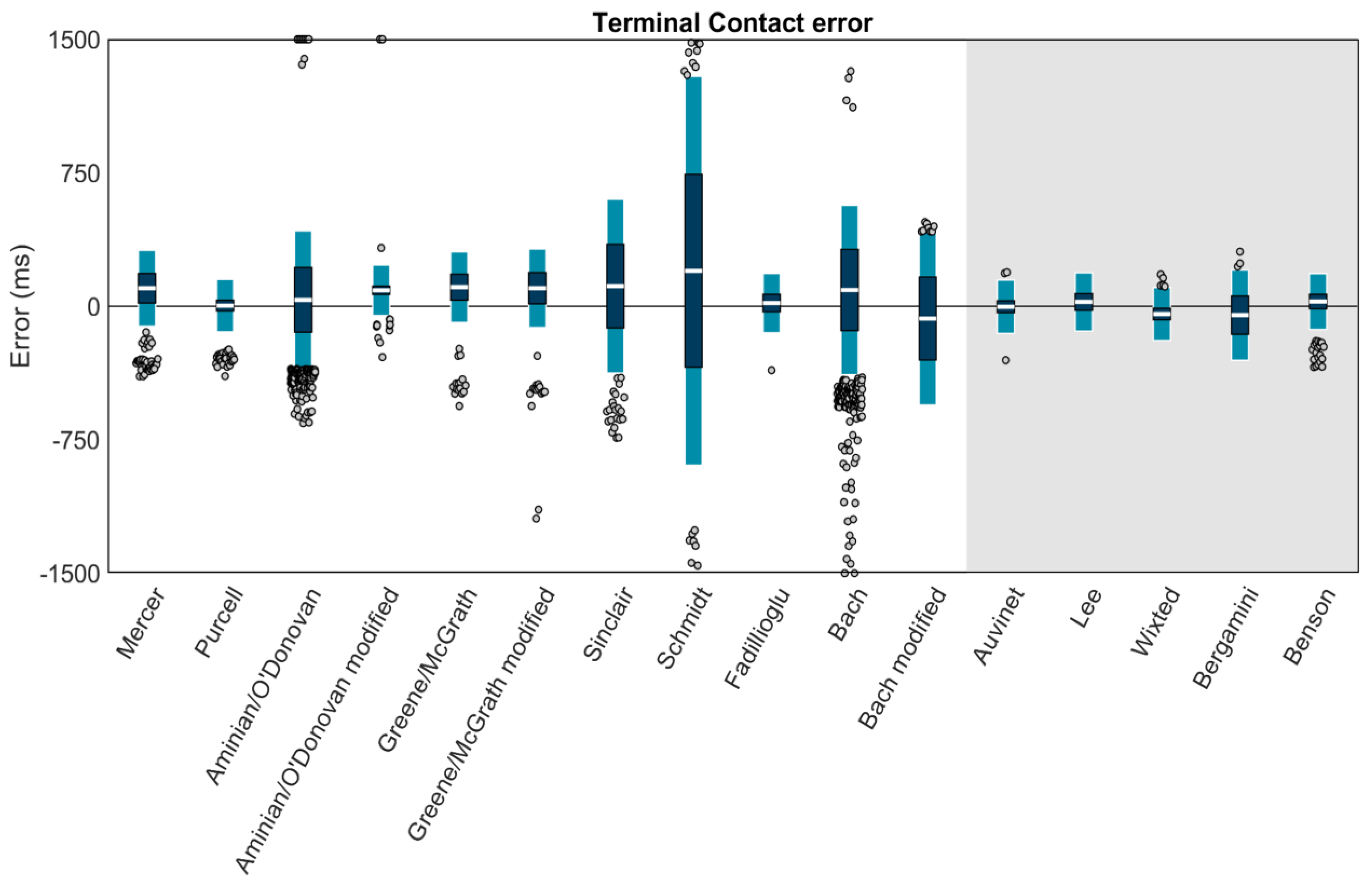
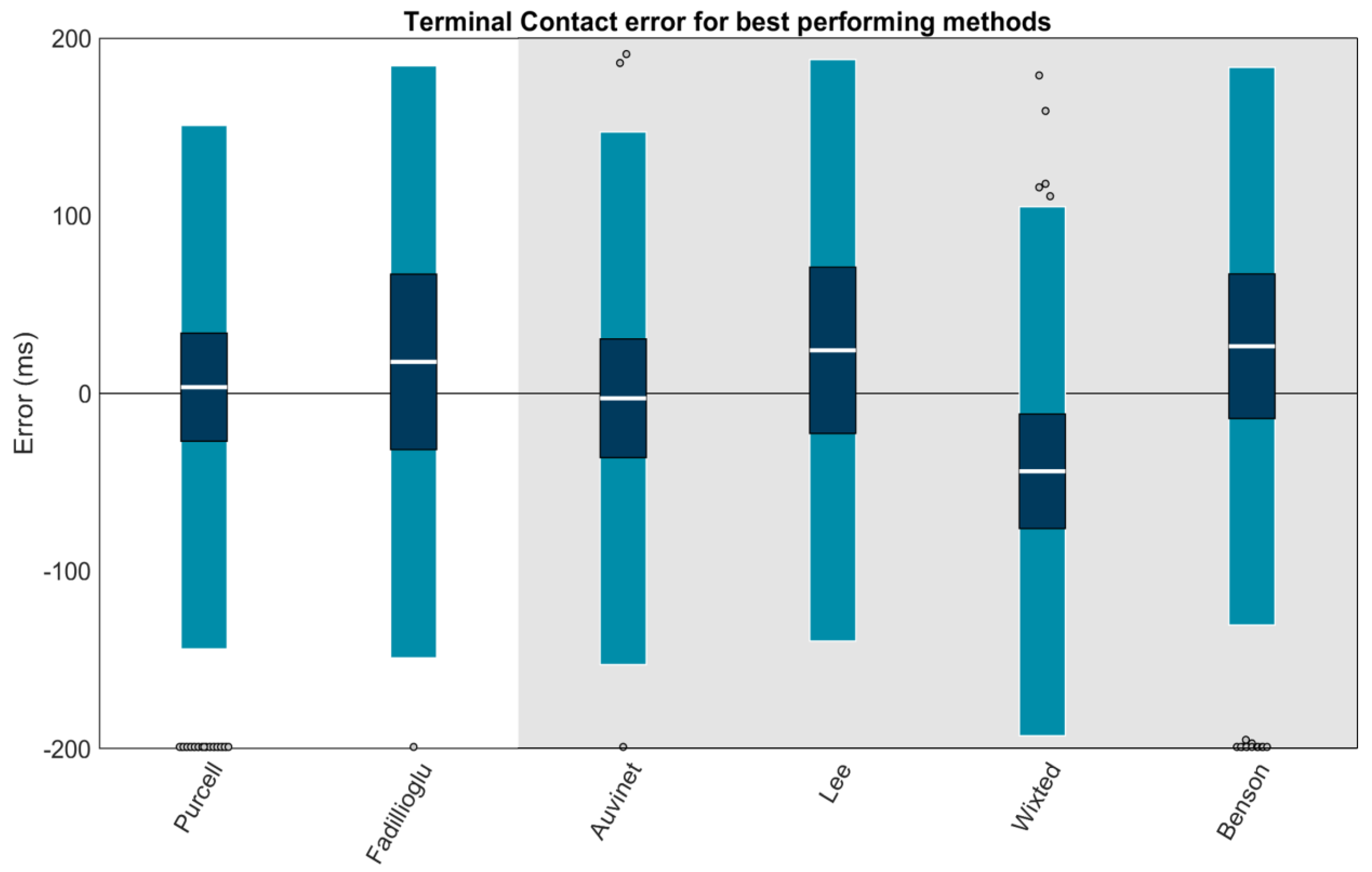
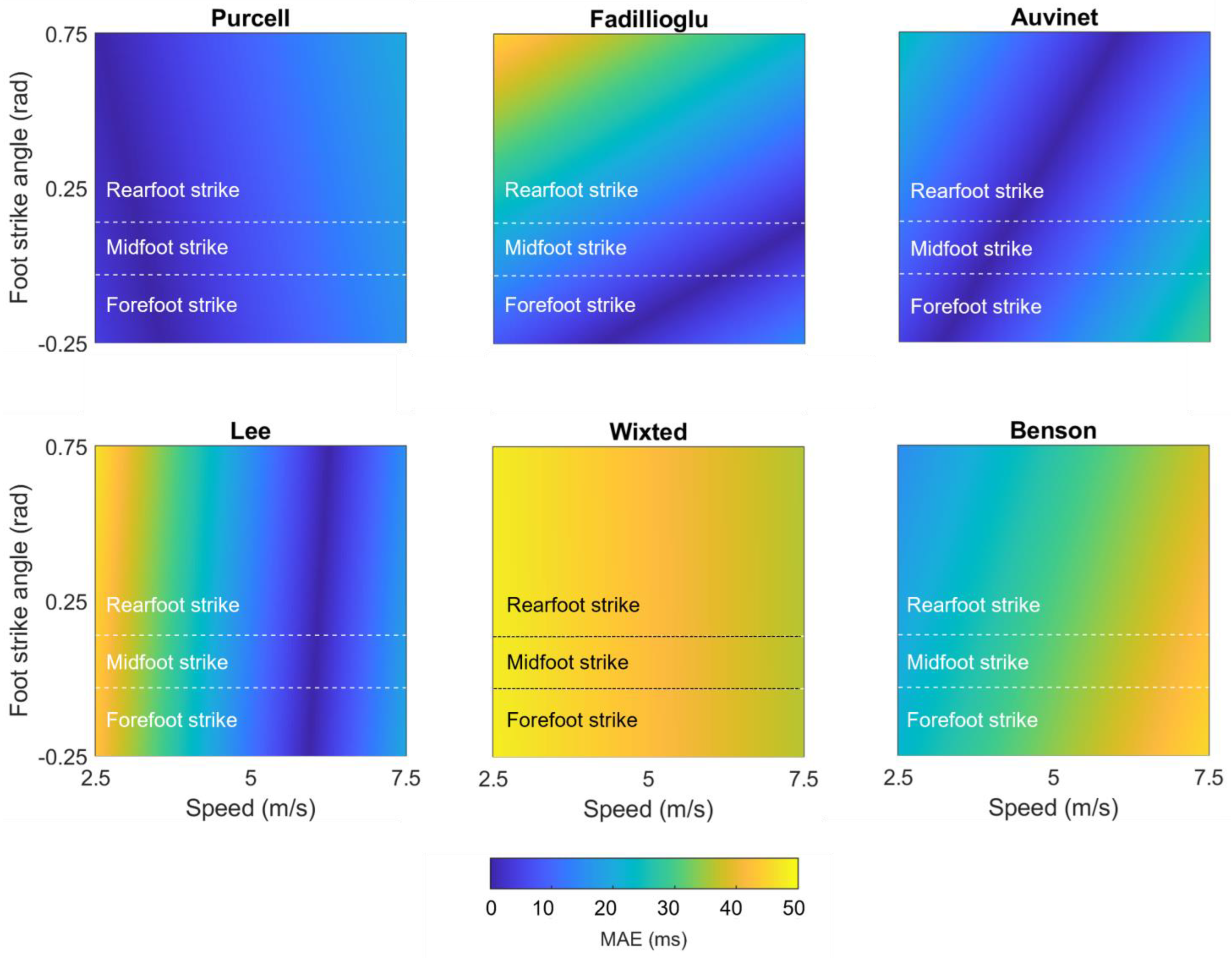
3.3. Terminal Contact
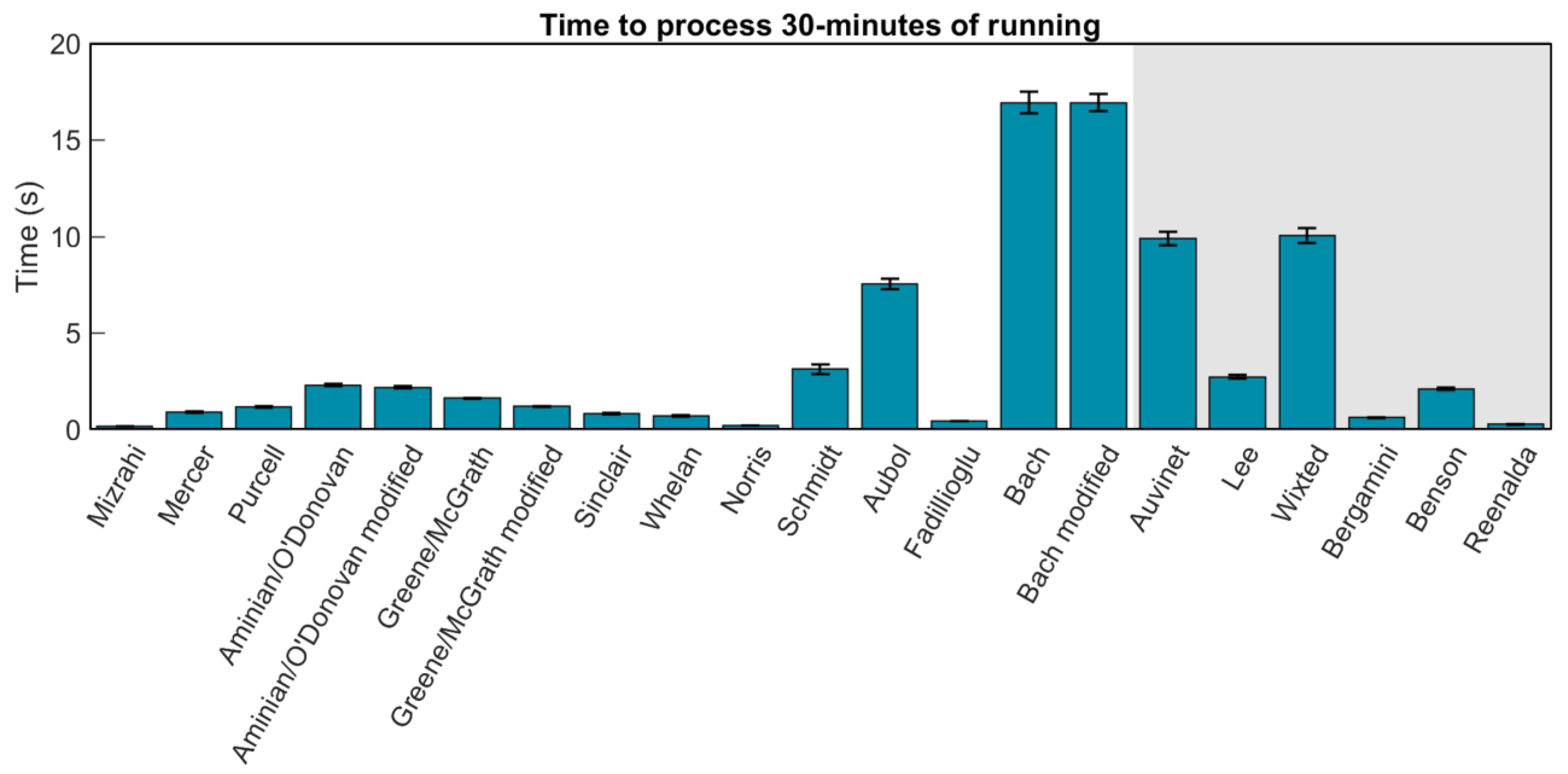
3.4. Processing Time
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hay, J.; Reid, J. Anatomy, Mechanics, and Human Motion; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Mercer, J.; Dolgan, J.; Griffin, J.; Bestwick, A. The physiological importance of preffered stride frequency during running at different speeds. J. Exerc. Physiol. 2008, 11, 26–31. [Google Scholar]
- Weyand, P.G.; Sternlight, D.B.; Bellizzi, M.J.; Wright, S. Faster top running speeds are achieved with greater ground forces not more rapid leg movements. J. Appl. Physiol. 2000, 89, 1991–1999. [Google Scholar] [CrossRef] [PubMed]
- Hunter, J.P.; Marshall, R.N.; McNair, P.J. Interaction of Step Length and Step Rate during Sprint Running. Med. Sci. Sport. Exerc. 2004, 36, 261–271. [Google Scholar] [CrossRef] [PubMed]
- Smith, L.; Preece, S.; Mason, D.; Bramah, C. A comparison of kinematic algorithms to estimate gait events during overground running. Gait Posture 2015, 41, 39–43. [Google Scholar] [CrossRef] [PubMed]
- Fellin, R.E.; Rose, W.C.; Royer, T.D.; Davis, I.S. Comparison of methods for kinematic identification of footstrike and toe-off during overground and treadmill running. J. Sci. Med. Sport. 2010, 13, 646–650. [Google Scholar] [CrossRef]
- Hreljac, A.; Stergiou, N. Phase determination during normal running using kinematic data. Med. Biol. Eng. Comput. 2000, 38, 503–506. [Google Scholar] [CrossRef]
- Sinclair, J.; Edmundson, C.; Brooks, D.; Hobbs, S. Evaluation of kinematic methods of identifying gait events during running. Int. J. Sport. Sci. Eng. 2011, 5, 188–192. [Google Scholar]
- Nigg, B.; De Boer, R.; Fisher, V. A kinematic comparison of overground and treadmill running. Med. Sci. Sport. Exerc. 1995, 27, 98–105. [Google Scholar] [CrossRef]
- Riley, P.O.; Dicharry, J.; Franz, J.; Della Croce, U.; Wilder, R.P.; Kerrigan, D.C. A Kinematics and Kinetic Comparison of Overground and Treadmill Running. Med. Sci. Sport. Exerc. 2008, 40, 1093–1100. [Google Scholar] [CrossRef]
- Hillel, I.; Gazit, E.; Nieuwboer, A.; Avanzino, L.; Rochester, L.; Cereatti, A.; Della Croce, U.; Rikkert, M.; Bloem, B.; Pelosin, E.; et al. Is every-day walking in older adults more analogous to dual-task walking or to usual walking? Elucidating the gaps between gait performance in the lab and during 24/7 monitoring. Eur. Rev. Aging Phys. Act. 2019, 16, 1–12. [Google Scholar] [CrossRef]
- Schache, A.G.; Blanch, P.D.; Rath, A.D.; Wrigley, T.V.; Starr, R.; Bennell, K.L. A comparison of overground and treadmill running for measuring the three-dimensional kinematics of the lumbo–pelvic–hip complex. Clin. Biomech. 2001, 16, 667–680. [Google Scholar] [CrossRef] [PubMed]
- Edwards, W.B. Modeling Overuse Injuries in Sport as a Mechanical Fatigue Phenomenon. Exerc. Sport. Sci. Rev. 2018, 46, 224–231. [Google Scholar] [CrossRef]
- Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Troster, G. Monitoring Kinematic Changes with Fatigue in Running Using Body-Worn Sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Ruder, M.; Jamison, S.T.; Tenforde, A.; Mulloy, F.; Davis, I.S. Relationship of Foot Strike Pattern and Landing Impacts during a Marathon. Med. Sci. Sport. Exerc. 2019, 51, 2073–2079. [Google Scholar] [CrossRef] [PubMed]
- Kiernan, D.; Hawkins, D.A.; Manoukian, M.A.; McKallip, M.; Oelsner, L.; Caskey, C.F.; Coolbaugh, C.L. Accelerometer-based prediction of running injury in National Collegiate Athletic Association track athletes. J. Biomech. 2018, 73, 201–209. [Google Scholar] [CrossRef]
- Paquette, M.R.; Melcher, D.A. Impact of a Long Run on Injury-Related Biomechanics with Relation to Weekly Mileage in Trained Male Runners. J. Appl. Biomech. 2017, 33, 216–221. [Google Scholar] [CrossRef]
- Tam, N.; Tucker, R.; Wilson, J.A. Individual Responses to a Barefoot Running Program. Am. J. Sport. Med. 2016, 44, 777–784. [Google Scholar] [CrossRef]
- Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J. Continuous three dimensional analysis of running mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in running mechanics. J. Biomech. 2016, 49, 3362–3367. [Google Scholar] [CrossRef]
- Willy, R.W.; Buchenic, L.; Rogacki, K.; Ackerman, J.; Schmidt, A.; Willson, J.D. In-field gait retraining and mobile monitoring to address running biomechanics associated with tibial stress fracture. Scand. J. Med. Sci. Sport. 2015, 26, 197–205. [Google Scholar] [CrossRef]
- El Kati, R.; Forrester, S.; Fleming, P. Evaluation of pressure insoles during running. Procedia Eng. 2010, 2, 3053–3058. [Google Scholar] [CrossRef]
- Willy, R.W. Innovations and pitfalls in the use of wearable devices in the prevention and rehabilitation of running related injuries. Phys. Ther. Sport. 2018, 29, 26–33. [Google Scholar] [CrossRef] [PubMed]
- Running USA. 2017 National Runner Survey; Running USA: Troy, MI, USA, 2017. [Google Scholar]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Moore, I.; Willy, R. Use of Wearables: Tracking and Retraining in Endurance Runners. Curr. Sport. Med. Rep. 2019, 18, 437–444. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Räisänen, A.M.; Clermont, C.A.; Ferber, R. Is This the Real Life, or Is This Just Laboratory? A Scoping Review of IMU-Based Running Gait Analysis. Sensors 2022, 22, 1722. [Google Scholar] [CrossRef] [PubMed]
- Mercer, A.J.; Bates, B.T.; Dufek, J.; Hreljac, A. Characteristics of shock attenuation during fatigued running. J. Sport. Sci. 2003, 21, 911–919. [Google Scholar] [CrossRef]
- Purcell, B.; Channells, J.; James, D.; Barrett, R. Use of accelerometers for detecting foot-ground contact time during running. BioMEMS Nanotechnol. II 2005, 6036, 292–299. [Google Scholar] [CrossRef]
- McGrath, D.; Greene, B.R.; O’donovan, K.J.; Caulfield, B. Gyroscope-based assessment of temporal gait parameters during treadmill walking and running. Sport. Eng. 2012, 15, 207–213. [Google Scholar] [CrossRef]
- Whelan, N.; Healy, R.; Kenny, I.; Harrison, A. A comparison of foot strike events using the force plate and peak impact acceleration measures. In Proceedings of the 33rd International Conference on Biomechanics in Sports, Poitiers, France, 29 June–3 July 2015. [Google Scholar]
- Norris, M.; Kenny, I.C.; Anderson, R. Comparison of accelerometry stride time calculation methods. J. Biomech. 2016, 49, 3031–3034. [Google Scholar] [CrossRef]
- Auvinet, B.; Gloria, E.; Renault, G.; Barrey, E. Runner’s stride analysis: Comparison of kinematic and kinetic analyses under field conditions. Sci. Sport. 2002, 17, 92–94. [Google Scholar] [CrossRef]
- Lee, J.; Mellifont, R.; Burkett, B. The use of a single inertial sensor to identify stride, step, and stance durations of running gait. J. Sci. Med. Sport 2010, 13, 270–273. [Google Scholar] [CrossRef] [PubMed]
- Wixted, A.; Billing, D.; James, D. Validation of trunk mounted inertial sensors for analysing running biomechanics under field conditions, using synchronously collected foot contact data. Sport. Eng. 2010, 12, 207–212. [Google Scholar] [CrossRef]
- O’Donovan, K.; Greene, B.; McGrath, D.; O’Neill, R.; Burns, A.; Caulfield, B. SHIMMER: A new tool for temporal Gait analysis. In Proceedings of the 31st Annual International Conference of the IEEE EMBS, Minneapolis, MN, USA, 3–6 September 2009. [Google Scholar]
- Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [Google Scholar] [CrossRef]
- Sinclair, J.; Hobbs, S.J.; Protheroe, L.; Edmundson, C.J.; Greenhalgh, A. Determination of Gait Events Using an Externally Mounted Shank Accelerometer. J. Appl. Biomech. 2013, 29, 118–122. [Google Scholar] [CrossRef]
- Schmidt, M.; Rheinländer, C.; Nolte, K.F.; Wille, S.; Wehn, N.; Jaitner, T. IMU- based Determination of Stance Duration during Sprinting. Procedia Eng. 2016, 147, 747–752. [Google Scholar] [CrossRef]
- Aubol, K.G.; Milner, C. Foot contact identification using a single triaxial accelerometer during running. J. Biomech. 2020, 105, 109768. [Google Scholar] [CrossRef]
- Fadillioglu, C.; Stetter, B.J.; Ringhof, S.; Krafft, F.C.; Sell, S.; Stein, T. Automated gait event detection for a variety of locomotion tasks using a novel gyroscope-based algorithm. Gait Posture 2020, 81, 102–108. [Google Scholar] [CrossRef]
- Bergamini, E.; Picerno, P.; Pillet, H.; Natta, F.; Thoreux, P.; Camomilla, V. Estimation of temporal parameters during sprint running using a trunk-mounted inertial measurement unit. J. Biomech. 2012, 45, 1123–1126. [Google Scholar] [CrossRef]
- Reenalda, J.; Zandbergen, M.A.; Harbers, J.H.; Paquette, M.R.; Milner, C.E. Detection of foot contact in treadmill running with inertial and optical measurement systems. J. Biomech. 2021, 121, 110419. [Google Scholar] [CrossRef]
- Bach, M.M.; Dominici, N.; Daffertshofer, A. Predicting vertical ground reaction forces from 3D accelerometery using reservoir computers leads to accurate gait event detection. BioRxiv 2022. [Google Scholar] [CrossRef]
- Benson, L.; Clermont, C.; Watari, R.; Exley, T.; Ferber, R. Automated accelerometer-based gait event detection during multiple running conditions Lauren. Sensors 2019, 19, 1483. [Google Scholar] [CrossRef]
- Greene, B.R.; McGrath, D.; O’neill, R.; O’donovan, K.J.; Burns, A.; Caulfield, B. An adaptive gyroscope-based algorithm for temporal gait analysis. Med. Biol. Eng. Comput. 2010, 48, 1251–1260. [Google Scholar] [CrossRef] [PubMed]
- Aminian, K.; Najafi, B.; Büla, C.; Leyvraz, P.-F.; Robert, P. Spatio-temporal parameters of gait measured by an ambulatory system using miniature gyroscopes. J. Biomech. 2002, 35, 689–699. [Google Scholar] [CrossRef] [PubMed]
- United States Geological Survey. Gravity Anamoly Map of the Continental United States. Available online: https://mrdata.usgs.gov/gravity/map-us.html#home (accessed on 5 June 2019).
- National Geodtic Survey. NGS Surface Gravity Prediction. National Oceanic and Atmospheric Administration. Available online: https://www.ngs.noaa.gov/cgi-bin/grav_pdx.prl (accessed on 5 June 2019).
- Coolbaugh, C.L.; Hawkins, D.A. Standardizing Accelerometer-Based Activity Monitor Calibration and Output Reporting. J. Appl. Biomech. 2014, 30, 594–597. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Cavanagh, P.R. ISB recommendations for standardization in the reporting of kinematic data. J. Biomech. 1995, 28, 1257–1261. [Google Scholar] [CrossRef]
- Altman, A.R.; Davis, I.S. A kinematic method for footstrike pattern detection in barefoot and shod runners. Gait Posture 2012, 35, 298–300. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar] [CrossRef]
- Ludwig, S.; Burnham, K.; Jimenez, A.; Touma, P. Comparison of Attitude and Heading Reference Systems Using Foot Mounted MIMU Sensor Data: Basic, Madgwick, and Mahony. In Proceedings of the 2018 International Society for Optics and Photonics, Smart Structures and Materials and Non-Destructive Evaluation and Health Monitoring, Denver, CO, USA, 4–8 March 2018. [Google Scholar]
- Ludwig, S.; Burnham, K. Comparison of Euler Estimate using Extended Kalman Filter, Madgwick and Mahony on Quadcopter Flight Data. In Proceedings of the International Conference on Unmanned Aircraft Systems, Dallas, TX, USA, 12–15 June 2018. [Google Scholar]
- McGinnis, R.S.; Perkins, N.C. A Highly Miniaturized, Wireless Inertial Measurement Unit for Characterizing the Dynamics of Pitched Baseballs and Softballs. Sensors 2012, 12, 11933–11945. [Google Scholar] [CrossRef]
- Cain, S.M.; McGinnis, R.S.; Davidson, S.P.; Vitali, R.V.; Perkins, N.C.; McLean, S.G. Quantifying performance and effects of load carriage during a challenging balancing task using an array of wireless inertial sensors. Gait Posture 2016, 43, 65–69. [Google Scholar] [CrossRef]
- Cain, S.M. IMUs (Inertial Measurement Units): Unboxing the black box. In Proceedings of the 41st Annual Meeting of the American Society of Biomechanics, Boulder, CO, USA, 8–11 August 2017. [Google Scholar]
- Carstensen, B.; Simpson, J.; Gurrin, L. Statistical Models for Assessing Agreement in Method Comparison Studies with Replicate Measurements. Int. J. Biostat. 2008, 4, 16. [Google Scholar] [CrossRef]
- Myles, P.; Cui, J.I. Using the Bland–Altman method to measure agreement with repeated measures. Br. J. Anaesth. 2007, 99, 309–311. [Google Scholar] [CrossRef]
- Searle, S.R. An overview of variance component estimation. Metrika 1995, 42, 215–230. [Google Scholar] [CrossRef]
- Bland, J.; Altman, D. Measuring agreement in method comparison studies. Stat. Methods Med. Res. 1999, 8, 135–160. [Google Scholar] [CrossRef] [PubMed]
- Kiernan, D.; Hawkins, D. Bad Vibes? Preliminary Data on Shock Attenuation in Injured and Uninjured Runners; American Society of Biomechanics: Atlanta, GA, USA, 2020. [Google Scholar]
- Kiernan, D.; Miller, R.H.; Baum, B.S.; Kwon, H.J.; Shim, J.K. Amputee locomotion: Frequency content of prosthetic vs. intact limb vertical ground reaction forces during running and the effects of filter cut-off frequency. J. Biomech. 2017, 60, 248–252. [Google Scholar] [CrossRef] [PubMed]
- Peters, A.; Galna, B.; Sangeux, M.; Morris, M.; Baker, R. Quantification of soft tissue artifact in lower limb human motion analysis: A systematic review. Gait Posture 2010, 31, 1–8. [Google Scholar] [CrossRef]
- Holden, J.P.; Orsini, J.A.; Siegel, K.L.; Kepple, T.M.; Gerber, L.H.; Stanhope, S.J. Surface movement errors in shank kinematics and knee kinetics during gait. Gait Posture 1997, 5, 217–227. [Google Scholar] [CrossRef]
- Patoz, A.; Lussiana, T.; Breine, B.; Gindre, C.; Malatesta, D. Comparison of different machine learning models to enhance sacral acceleration-based estimations of running stride temporal variables and peak vertical ground reaction force. Sport. Biomech. 2023, 1–17. [Google Scholar] [CrossRef]
- Alcantara, R.S.; Day, E.M.; Hahn, M.E.; Grabowski, A.M. Sacral acceleration can predict whole-body kinetics and stride kinematics across running speeds. PeerJ 2021, 9, e11199. [Google Scholar] [CrossRef] [PubMed]
- Falbriard, M.; Soltani, A.; Aminian, K. Running Speed Estimation Using Shoe-Worn Inertial Sensors: Direct Integration, Linear, and Personalized Model. Front. Sport. Act. Living 2021, 3, 585809. [Google Scholar] [CrossRef]
- Yang, S.; Mohr, C.; Li, Q. Ambulatory running speed estimation using an inertial sensor. Gait Posture 2011, 34, 462–466. [Google Scholar] [CrossRef]
- Shiang, T.-Y.; Hsieh, T.-Y.; Lee, Y.-S.; Wu, C.-C.; Yu, M.-C.; Mei, C.-H.; Tai, I.-H. Determine the Foot Strike Pattern Using Inertial Sensors. J. Sens. 2016, 2016, 1–6. [Google Scholar] [CrossRef]
- Mo, S.; Chow, D.H. Accuracy of three methods in gait event detection during overground running. Gait Posture 2018, 59, 93–98. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef] [PubMed]
- Munro, C.F.; Miller, D.I.; Fuglevand, A.J. Ground reaction forces in running: A reexamination. J. Biomech. 1987, 20, 147–155. [Google Scholar] [CrossRef] [PubMed]
- Cavanagh, P.R.; Kram, R. Stride length in distance running: Velocity, body dimesnions, and added mass effects. Med. Sci. Sport. Exerc. 1989, 21, 467–479. [Google Scholar] [CrossRef]
- Williams, K.R.; Snow, R.; Arguss, C. Changes in distance running kinematicswith fatigue. Int. J. Sport Biomech. 1991, 7, 138–162. [Google Scholar] [CrossRef]
- De Wit, B.; De Clercq, D.; Aerts, P. Biomechanical analysis of the stance phase during barefoot and shod running. J. Biomech. 1999, 33, 269–278. [Google Scholar] [CrossRef]
- Leskinen, A.; Häkkinen, K.; Virmavirta, M.; Isolehto, J.; Kyröläinen, H. Comparison of running kinematics between elite and national-standard 1500-m runners. Sport. Biomech. 2009, 8, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Weyand, P.G.; Sandell, R.F.; Prime, D.N.L.; Bundle, M.W. The biological limits to running speed are imposed from the ground up. J. Appl. Physiol. 2010, 108, 950–961. [Google Scholar] [CrossRef] [PubMed]
- Meardon, S.A.; Hamill, J.; Derrick, T.R. Running injury and stride time variability over a prolonged run. Gait Posture 2011, 33, 36–40. [Google Scholar] [CrossRef] [PubMed]
- Shorten, M.R.; Winslow, D.S. Spectral Analysis of Impact Shock during Running. Int. J. Sport. Biomech. 1992, 8, 288–304. [Google Scholar] [CrossRef]
- Hamill, J.; Derrick, T.; Holt, K. Shock attenuation and stride frequency during running. Hum. Mov. Sci. 1995, 14, 45–60. [Google Scholar] [CrossRef]
- Derrick, T.R.; Hamill, J.; Caldwell, G.E. Energy absorption of impacts during running at various stride lengths. Med. Sci. Sport. Exerc. 1998, 30, 128–135. [Google Scholar] [CrossRef] [PubMed]
- Derrick, T.R.; Dereu, D.; McLean, S.P. Impacts and kinematic adjustments during an exhaustive run. Med. Sci. Sport. Exerc. 2002, 34, 998–1002. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Bai, J.; Shao, J. Application of the wavelet transforms on axial strain calculation in ultrasound elastography. Prog. Nat. Sci. 2006, 16, 942–947. [Google Scholar] [CrossRef]
- Lafortune, M.A. Three-dimensional acceleration of the tibia during walking and running. J. Biomech. 1991, 24, 877–886. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic. Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; x-io: Bristol, UK, 2010. [Google Scholar]












| Initial Contact (IC) | Terminal Contact (TC) | |||||
|---|---|---|---|---|---|---|
| Method | Surface | Speed | Foot Strike | Surface | Speed | Foot Strike |
| Mizrahi | −5.02 | 0.71 | −15.91 | n/a | ||
| Mercer | −5.07 | 2.59 | −11.99 | −0.07 | 34.17 * | −47.56 |
| Purcell | 0.74 | −0.14 | 19.66 | 2.46 | 4.00 * | 4.02 |
| Aminian/O’Donovan | 2.81 | −31.55 | 19.26 | −15.10 | 11.29 | −1.83 |
| Aminian/O’Donovan modified | 11.40 | −5.58 | −0.12 | −1.26 | −5.95 * | 10.76 |
| Greene/McGrath | 2.22 | −5.53 | 23.35 | 1.12 | 1.18 | −16.43 |
| Greene/McGrath modified | −1.91 | −2.70 | 9.89 | 3.79 | 0.69 | −25.87 |
| Sinclair | −7.24 | 0.18 | −44.17 | −9.19 | −15.65 | 43.08 |
| Whelan | −14.22 | −13.89 * | 74.18 * | n/a | ||
| Norris | −23.89 | −36.41 | 148.44 | n/a | ||
| Schmidt | −11.17 | 209.61 * | 49.38 | −2.46 | 227.50 * | 18.75 |
| Aubol | −26.90 | −3.94 | 34.33 | n/a | ||
| Fadillioglu | 0.20 | 1.44 | −2.13 | 1.27 | −4.44 | 37.21 |
| Bach | 19.63 | 9.71 | 32.00 | −7.44 | −3.37 | −44.60 |
| Bach modified | −1.07 | 36.60 * | 68.71 | 1.75 | 54.45 * | 75.07 |
| Auvinet | −3.08 | 0.01 | 0.13 | 0.15 | 6.86 * | −19.55 |
| Lee | −1.03 | −15.11 * | 13.29 | 0.74 | −12.46 * | 4.05 |
| Wixted | −2.99 | −13.39 * | 10.53 | −1.52 | 2.37 | 0.20 |
| Bergamini | −9.77 | −19.31 * | 12.63 | −9.95 | 2.87 | −34.54 |
| Benson | 0.11 | −25.14 * | −6.34 | 0.46 | 4.60 * | −7.39 |
| Reenalda | −0.13 | −5.93 * | −9.39 | n/a | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiernan, D.; Dunn Siino, K.; Hawkins, D.A. Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns. Sensors 2023, 23, 5022. https://doi.org/10.3390/s23115022
Kiernan D, Dunn Siino K, Hawkins DA. Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns. Sensors. 2023; 23(11):5022. https://doi.org/10.3390/s23115022
Chicago/Turabian StyleKiernan, Dovin, Kristine Dunn Siino, and David A. Hawkins. 2023. "Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns" Sensors 23, no. 11: 5022. https://doi.org/10.3390/s23115022
APA StyleKiernan, D., Dunn Siino, K., & Hawkins, D. A. (2023). Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns. Sensors, 23(11), 5022. https://doi.org/10.3390/s23115022