
Frequency Modulation Control of an FMCW LiDAR Using a Frequency-to-Voltage Converter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. FMCW LiDAR System
2.1. Principle of Distance Measurement in FMCW LiDAR
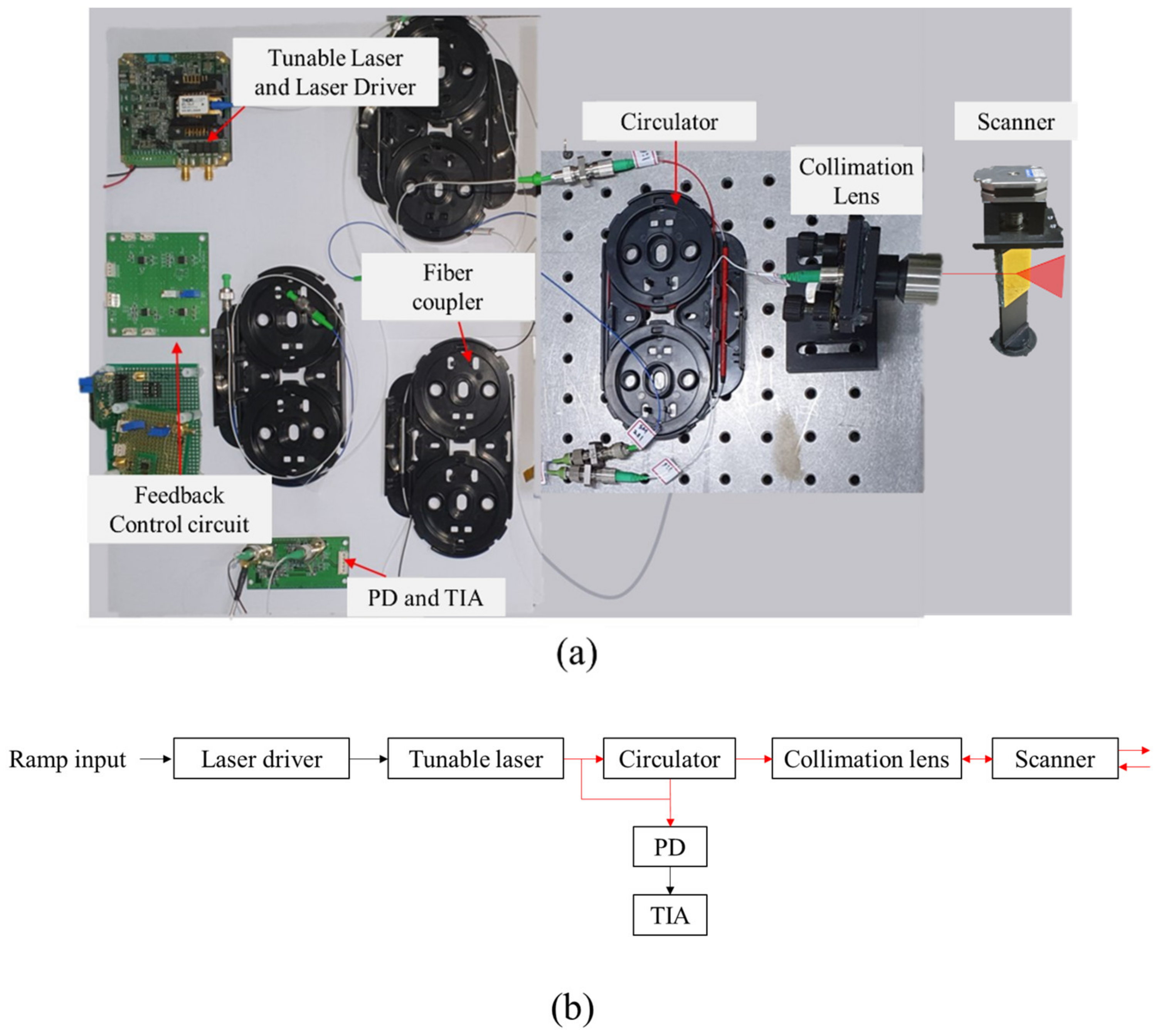
2.2. Composition of FMCW LiDAR
3. Frequency Modulation of a Tunable Laser
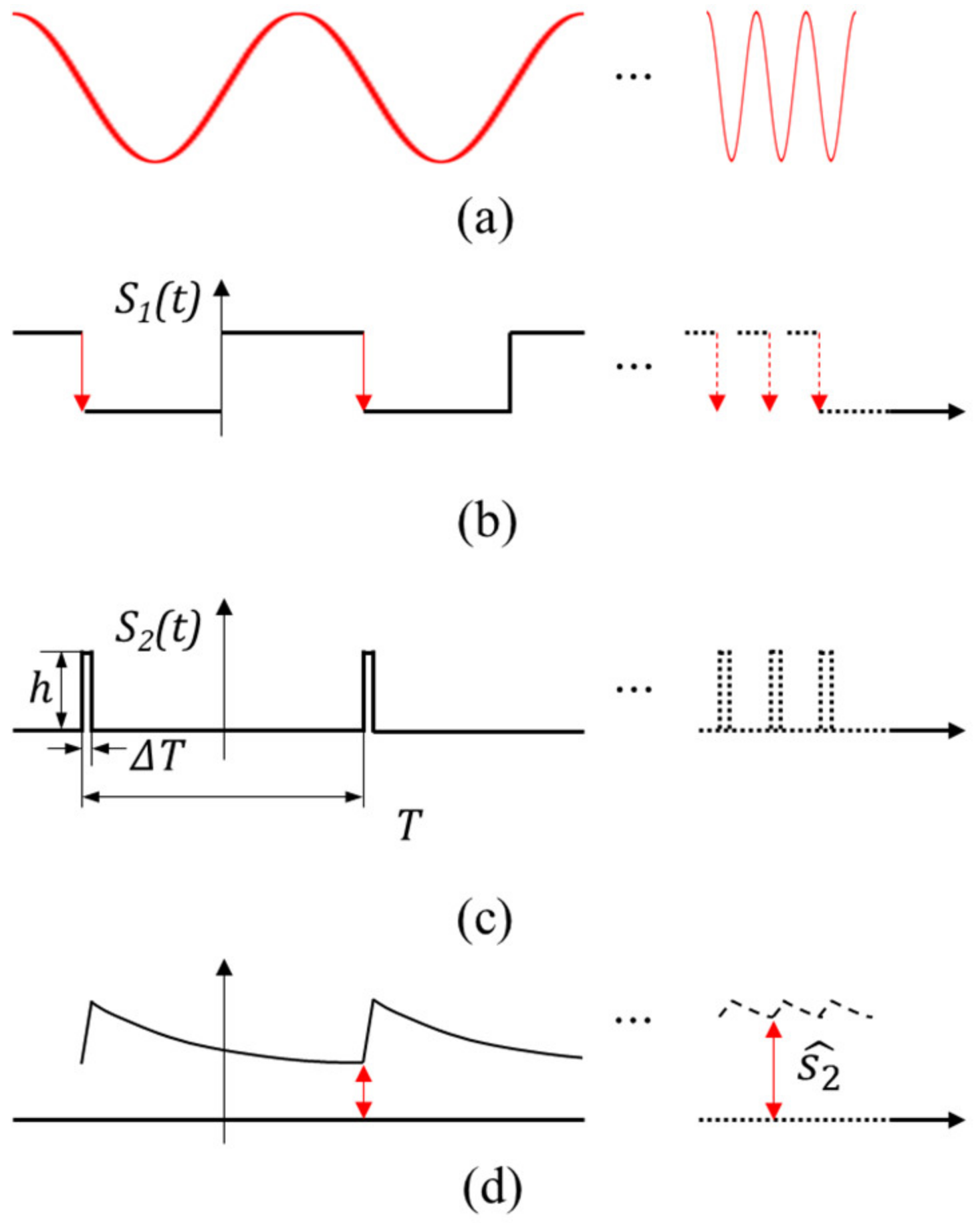
4. Proposed Control Method of Linear Frequency Modulation
5. Design of an FVC for Feedback Control
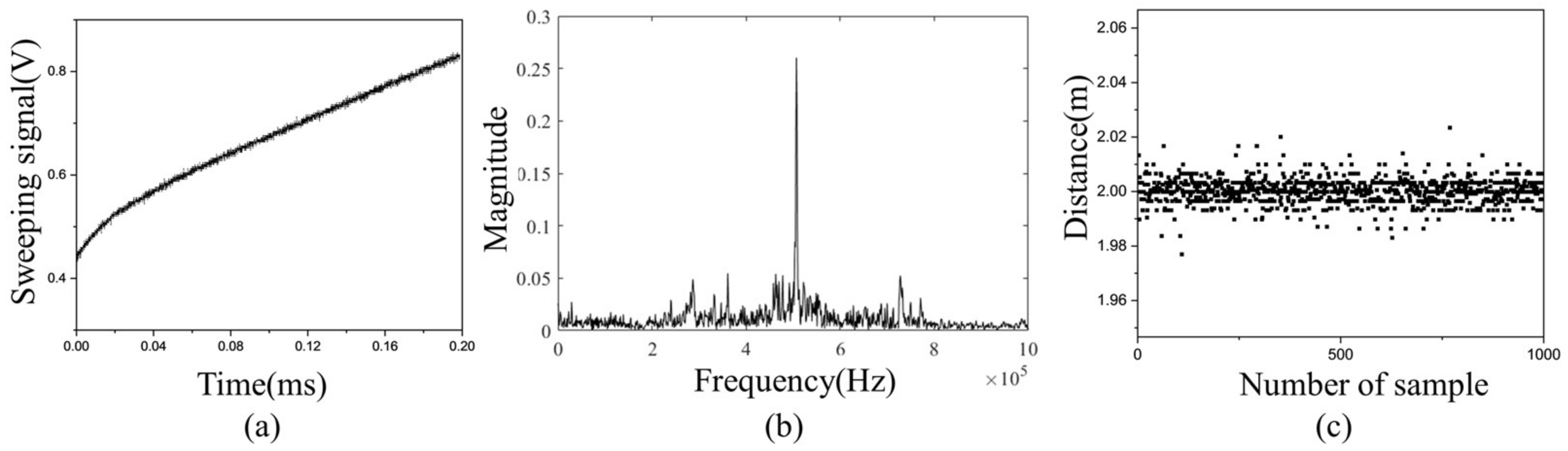
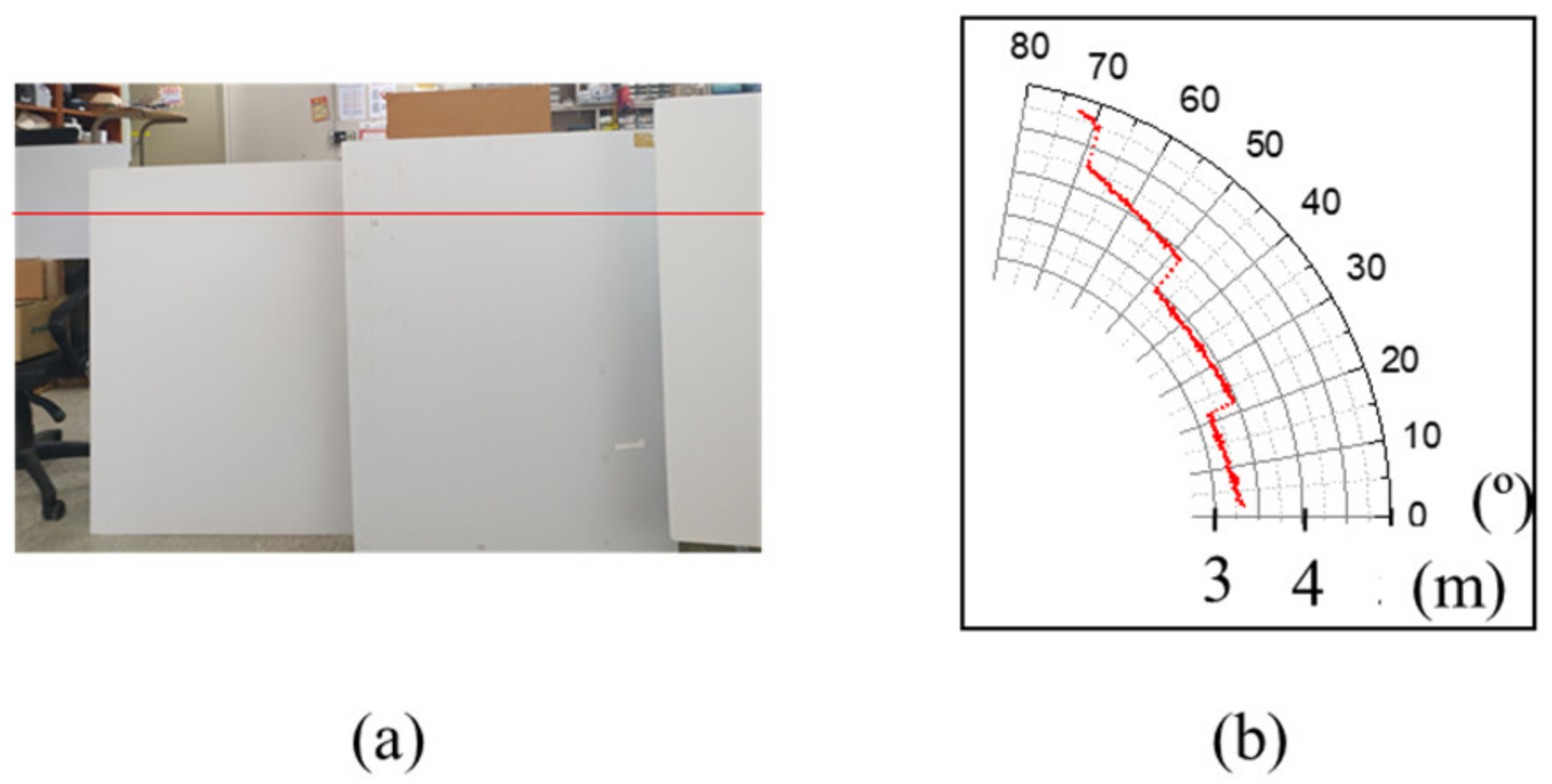
6. Experimental Results of Frequency Control
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Y.; Ibanez-Guzman, J. Lidar for autonomous driving: The principles, challenges, and trends for automotive lidar and perception systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Park, J.I.; Park, J.; Kim, K.S. Fast and accurate desnowing algorithm for LiDAR point clouds. IEEE Access 2020, 8, 160202–160212. [Google Scholar] [CrossRef]
- Crouch, S. Velocity measurement in automotive sensing: How FMCW radar and lidar can work together. IEEE Potentials 2019, 39, 15–18. [Google Scholar] [CrossRef]
- Rablau, C. LIDAR–A New (Self-Driving) Vehicle for Introducing Optics to Broader Engineering and Non-Engineering Audiences. In Proceedings of the Education and Training in Optics and Photonics, Quebec City, QC, Canada, 21–24 May 2019. [Google Scholar]
- Zhu, C.; Du, X.; Song, Y.; Chen, P. Influence of haze on pulse and FMCW laser ranging accuracy. In Proceedings of the 14th National Conference on Laser Technology and Optoelectronics (LTO 2019), Shanghai, China, 17–20 March 2019; Volume 11170, pp. 425–431. [Google Scholar]
- Amann, M.C.; Bosch, T.M.; Lescure, M.; Myllylae, R.A.; Rioux, M. Laser ranging: A critical review of unusual techniques for 163 distance measurement. Opt. Eng. 2001, 40, 10–19. [Google Scholar]
- Li, Z.; Liu, B.; Liao, C.R.; Fu, H. Solid-state FMCW LiDAR with in-fiber beam scanner. Opt. Lett. 2022, 47, 469–472. [Google Scholar] [CrossRef] [PubMed]
- Behroozpour, B.; Sandborn, P.A.; Wu, M.C.; Boser, B.E. Lidar system architectures and circuits. IEEE Commun. Mag. 2017, 55, 135–142. [Google Scholar] [CrossRef]
- Zheng, J. Analysis of optical frequency-modulated continuous-wave interference. Appl. Opt. 2004, 43, 4189–4198. [Google Scholar] [CrossRef]
- Norgia, M.; Bandi, F.; Pesatori, A.; Donati, S. High-sensitivity vibrometer based on FM self-mixing interferometry. J. Phys. Conf. Ser. 2019, 1249, 012020. [Google Scholar] [CrossRef]
- Zhang, X.; Pouls, J.; Wu, M.C. Laser frequency sweep linearization by iterative learning pre-distortion for FMCW LiDAR. Opt. Express 2019, 27, 9965–9974. [Google Scholar] [CrossRef]
- Yao, Z.; Xu, Z.; Mauldin, T.; Hefferman, G.; Wei, T. A reconfigurable architecture for continuous double-sided swept-laser linearization. J. Light. Technol. 2020, 38, 5170–5176. [Google Scholar] [CrossRef]
- Satyan, N.; Vasilyev, A.; Rakuljic, G.; Leyva, V.; Yariv, A. Precise control of broadband frequency chirps using optoelectronic feedback. Opt. Express 2009, 17, 15991–15999. [Google Scholar] [CrossRef] [PubMed]
- Satyan, N.; Liang, W.; Yariv, A. Coherence cloning using semiconductor laser optical phase-lock loops. IEEE J. Quantum Electron. 2009, 45, 755–761. [Google Scholar] [CrossRef]
- Hariyama, T.; Sandborn, P.A.; Watanabe, M.; Wu, M.C. High-accuracy range-sensing system based on FMCW using low-cost VCSEL. Opt. Express 2018, 26, 9285–9297. [Google Scholar] [CrossRef]
- DiLazaro, T.; Nehmetallah, G. Multi-terahertz frequency sweeps for high-resolution, frequency-modulated continuous wave ladar using a distributed feedback laser array. Opt. Express 2017, 25, 2327–2340. [Google Scholar] [CrossRef]
- Cao, X.; Wu, K.; Li, C.; Zhang, G.; Chen, J. Highly efficient iteration algorithm for a linear frequency-sweep distributed feedback laser in frequency-modulated continuous wave lidar applications. JOSA B 2021, 38, D8–D14. [Google Scholar] [CrossRef]
- Ristic, S.; Bhardwaj, A.; Rodwell, M.J.; Coldren, L.A.; Johansson, L.A. An optical phase-locked loop photonic integrated circuit. J. Light. Technol. 2009, 28, 526–538. [Google Scholar] [CrossRef]
- Behroozpour, B.; Sandborn, P.A.; Quack, N.; Seok, T.J.; Matsui, Y.; Wu, M.C.; Boser, B.E. Electronic-photonic integrated circuit for 3D microimaging. IEEE J. Solid-State Circuits 2016, 52, 161–172. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Buck, J.R.; Schafer, R.W. Discrete-Time Signal Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Zhao, Y.; Liao, Y. Discrimination methods and demodulation techniques for fiber Bragg grating sensors. Opt. Lasers Eng. 2004, 41, 1–18. [Google Scholar] [CrossRef]
- Sumathi, P. A frequency demodulation technique based on sliding DFT phase locking scheme for large variation FM signals. IEEE Commun. Lett. 2012, 16, 1864–1867. [Google Scholar] [CrossRef]
- Stace, T.; Luiten, A.; Kovacich, R. Laser offset-frequency locking using a frequency-to-voltage converter. Meas. Sci. Technol. 1998, 9, 1635. [Google Scholar] [CrossRef]
- Qin, J.; Zhou, Q.; Xie, W.; Xu, Y.; Yu, S.; Liu, Z.; tian Tong, Y.; Dong, Y.; Hu, W. Coherence enhancement of a chirped DFB laser for frequency-modulated continuous-wave reflectometry using a composite feedback loop. Opt. Lett. 2015, 40, 4500–4503. [Google Scholar] [CrossRef] [PubMed]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Hong, J.; Park, K. Frequency Modulation Control of an FMCW LiDAR Using a Frequency-to-Voltage Converter. Sensors 2023, 23, 4981. https://doi.org/10.3390/s23104981
Lee J, Hong J, Park K. Frequency Modulation Control of an FMCW LiDAR Using a Frequency-to-Voltage Converter. Sensors. 2023; 23(10):4981. https://doi.org/10.3390/s23104981
Chicago/Turabian StyleLee, Jubong, Jinseo Hong, and Kyihwan Park. 2023. "Frequency Modulation Control of an FMCW LiDAR Using a Frequency-to-Voltage Converter" Sensors 23, no. 10: 4981. https://doi.org/10.3390/s23104981
APA StyleLee, J., Hong, J., & Park, K. (2023). Frequency Modulation Control of an FMCW LiDAR Using a Frequency-to-Voltage Converter. Sensors, 23(10), 4981. https://doi.org/10.3390/s23104981