
Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm
Abstract
1. Introduction
2. Principle of Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm
2.1. Review of Phase Diversity Algorithm
2.2. The Principle of L-BFGS Algorithm and the Application of Analytic Gradient in L-BFGS Algorithm
2.3. Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm
3. Simulations
3.1. System Parameter Setting
3.2. Solution Accuracy Analysis of High-Resolution PD Algorithm
- The high-resolution PD algorithm achieves convergence when introducing different high-order aberrations;
- The calculation accuracy of wavefront aberrations is affected by higher order aberrations;
- The larger the wavefront aberration, the lower the solution accuracy.
3.3. Comparative Analysis
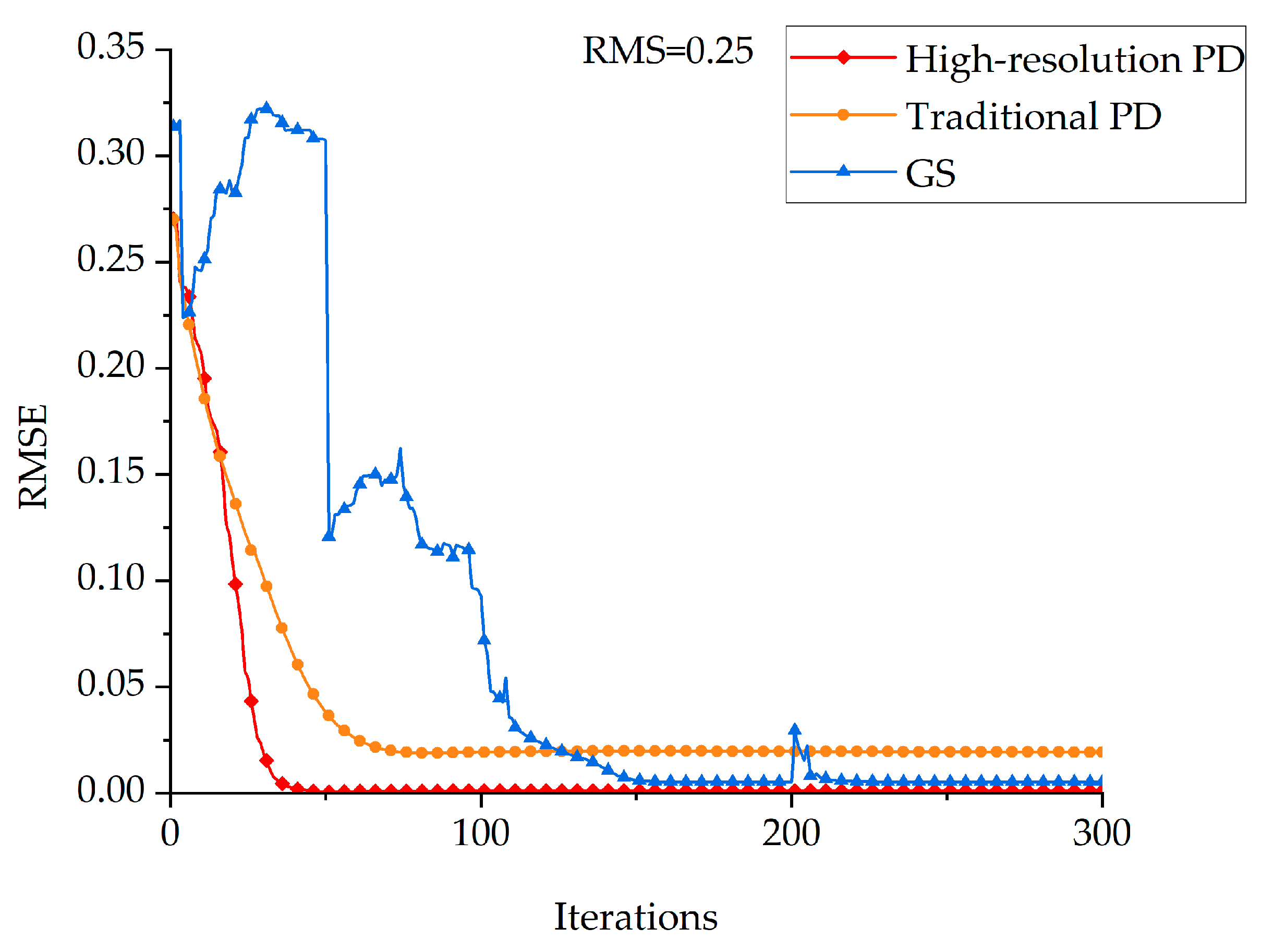
3.3.1. Comparative Analysis of Convergence Efficiency
- The high-resolution PD algorithm converges faster and has higher solution accuracy than the traditional PD algorithm;
- The GS algorithm guarantees the solution accuracy through multiple cross iterations but greatly sacrifices the convergence efficiency;
- The high-resolution PD algorithm can also quickly converge while ensuring the solution accuracy. We can see the proposed algorithm converges 2 times faster than the GS algorithm, which is commonly used now.
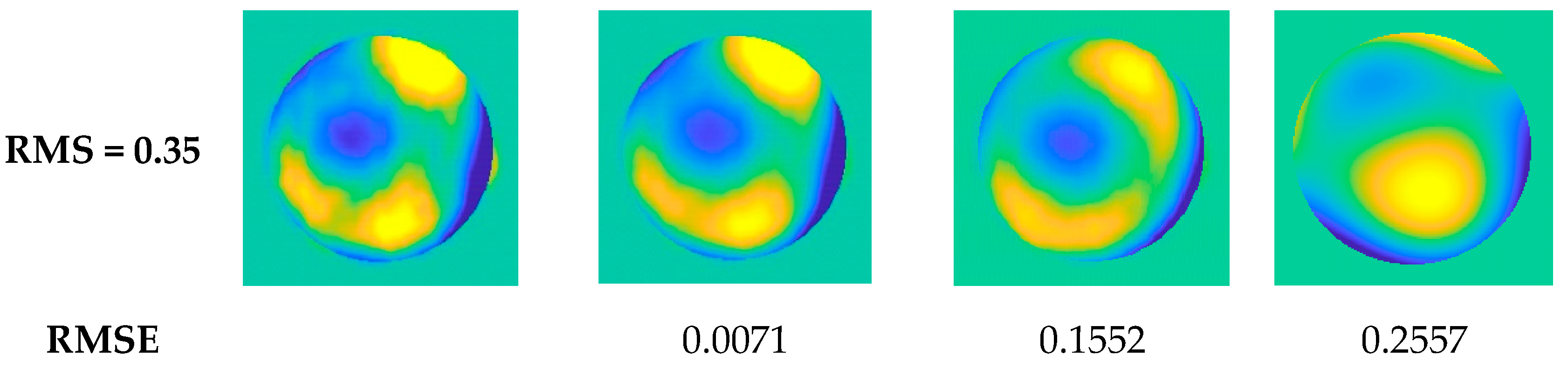
3.3.2. Comparing Analysis of Solution Accuracy
- In the case of high-order aberrations in the system, the accuracy of the high-resolution PD algorithm for solving aberrations is better than the other two algorithms;
- When the wavefront aberration is small, the GS algorithm can correctly solve the aberration. However, when the wavefront aberration is large, the GS algorithm falls into the local extremum, and the correct aberration information cannot be obtained;
- In the case of high-order aberrations in the system, the traditional PD algorithm cannot solve the aberrations;
- The solution accuracy decreases with the increase of wavefront aberration.
3.3.3. Comparing Analysis of Robustness Analysis
- In the case of low signal-to-noise ratio, the high-resolution PD algorithm and GS algorithm are relatively stable, while the traditional PD algorithm is more likely to fall into local extremum;
- When the noise becomes larger, the high-resolution PD algorithm can still maintain stability, while the stability of the GS algorithm will gradually decrease;
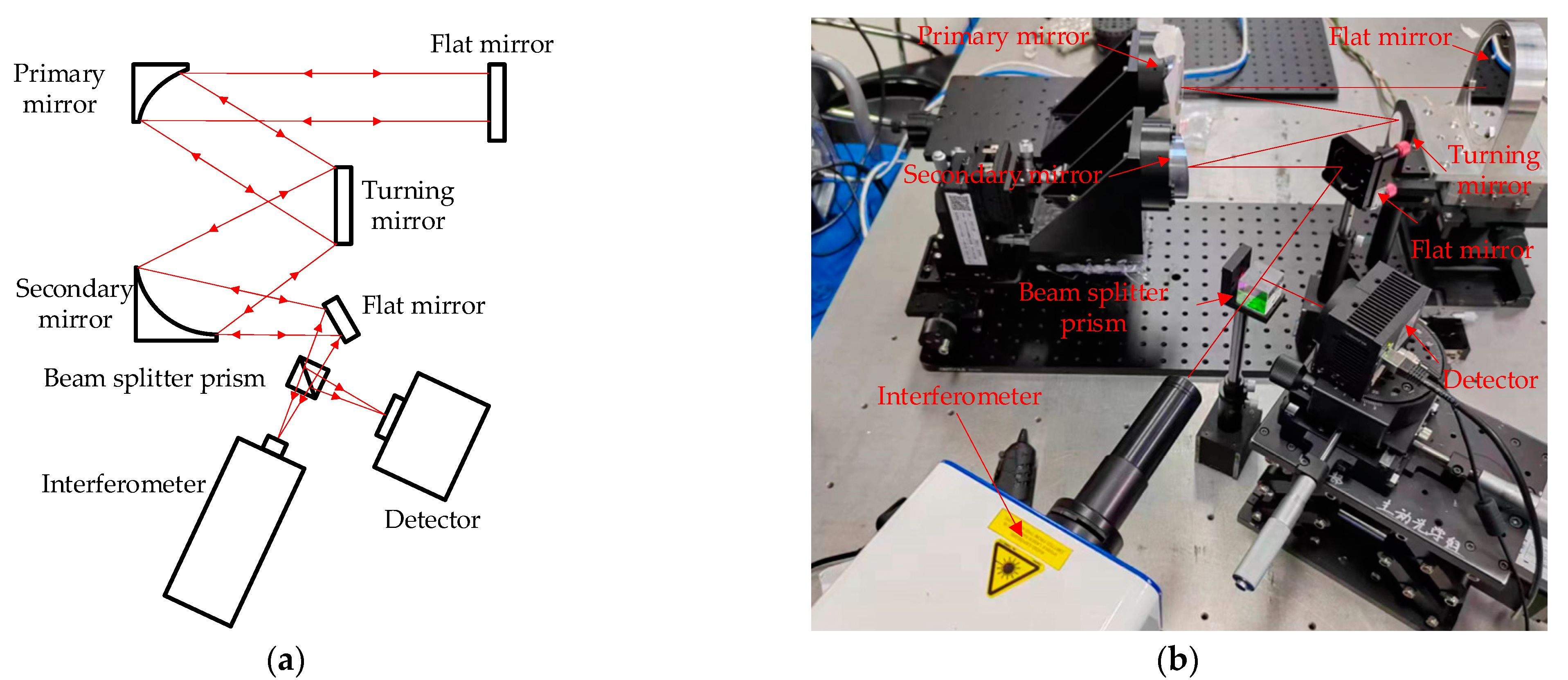
4. Experimental
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Noethe, L. Active optics in modern large optical telescopes. Prog. Opt. 2002, 43, 3–4. [Google Scholar]
- Dolkens, D.; Van Marrewijk, G.; Kuiper, H. Active correction system of a deployable telescope for Earth observation. In Proceedings of the International Conference on Space Optics—ICSO 2018, Crete, Greece, 9−12 October 2018; pp. 111–121. [Google Scholar]
- Tarenghi, M.; Wilson, R. The ESO NTT (New Technology Telescope): The first active optics telescope. In Proceedings of the Active telescope systems, Orlando, FL, USA, 28−31 March 1989; pp. 302–313. [Google Scholar]
- Poberezhskiy, I.; Luchik, T.; Zhao, F.; Frerking, M.; Basinger, S.; Cady, E.; Colavita, M.M.; Creager, B.; Fathpour, N.; Goullioud, R. Roman space telescope coronagraph: Engineering design and operating concept. In Proceedings of the Space Telescopes and Instrumentation 2020: Optical, Infrared, and Millimeter Wave, Online, 14−18 December 2020; pp. 314–335. [Google Scholar]
- Ko, J.; Davis, C.C. Comparison of the plenoptic sensor and the Shack–Hartmann sensor. Appl. Opt. 2017, 56, 3689–3698. [Google Scholar] [CrossRef] [PubMed]
- Plantet, C.; Meimon, S.; Conan, J.-M.; Fusco, T. Revisiting the comparison between the Shack-Hartmann and the pyramid wavefront sensors via the Fisher information matrix. Opt. Express 2015, 23, 28619–28633. [Google Scholar] [CrossRef]
- An, Q.; Wu, X.; Lin, X.; Ming, M.; Wang, J.; Chen, T.; Zhang, J.; Li, H.; Chen, L.; Tang, J. Large segmented sparse aperture collimation by curvature sensing. Opt. Express 2020, 28, 40176–40187. [Google Scholar] [CrossRef] [PubMed]
- Fienup, J.R. Phase retrieval algorithms: A personal tour. Appl. Opt. 2013, 52, 45–56. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Bai, J.; Hao, Y.; Jing, H.; Wang, C.; Lu, B.; Liang, Y.; Wang, K. Modal-based nonlinear optimization algorithm for wavefront measurement with under-sampled data. Opt. Lett. 2020, 45, 5456–5459. [Google Scholar] [CrossRef]
- Zhao, L.; Yan, H.; Bai, J.; Hou, J.; He, Y.; Zhou, X.; Wang, K. Simultaneous reconstruction of phase and amplitude for wavefront measurements based on nonlinear optimization algorithms. Opt. Express 2020, 28, 19726–19739. [Google Scholar] [CrossRef]
- Gerhberg, R.; Saxton, W. A practical algorithm for the determination of phase from image and diffraction plane picture. Optik 1972, 35, 237–246. [Google Scholar]
- Fienup, J.R. Phase-retrieval algorithms for a complicated optical system. Appl. Opt. 1993, 32, 1737–1746. [Google Scholar] [CrossRef]
- van Kooten, M.A.; Ragland, S.; Jensen-Clem, R.; Xin, Y.; Delorme, J.-R.; Wallace, J.K. On-sky Reconstruction of Keck Primary Mirror Piston Offsets Using a Zernike Wavefront Sensor. Astrophys. J. 2022, 932, 109. [Google Scholar] [CrossRef]
- Gonsalves, R.A.; Chidlaw, R. Wavefront sensing by phase retrieval. In Proceedings of the Applications of Digital Image Processing III, San Diego, CA, USA, 27−30 August 1979; pp. 32–39. [Google Scholar]
- Gonsalves, R.A. Phase retrieval and diversity in adaptive optics. Opt. Eng. 1982, 21, 829–832. [Google Scholar] [CrossRef]
- Paxman, R.G.; Schulz, T.J.; Fienup, J.R. Joint estimation of object and aberrations by using phase diversity. JOSA A 1992, 9, 1072–1085. [Google Scholar] [CrossRef]
- Paxman, R.G.; Fienup, J. Optical misalignment sensing and image reconstruction using phase diversity. JOSA A 1988, 5, 914–923. [Google Scholar] [CrossRef]
- Qi, X.; Ju, G.; Xu, S. Efficient solution to the stagnation problem of the particle swarm optimization algorithm for phase diversity. Appl. Opt. 2018, 57, 2747–2757. [Google Scholar] [CrossRef]
- Ju, G.; Qi, X.; Ma, H.; Yan, C. Feature-based phase retrieval wavefront sensing approach using machine learning. Opt. Express 2018, 26, 31767–31783. [Google Scholar] [CrossRef]
- Möckl, L.; Petrov, P.N.; Moerner, W. Accurate phase retrieval of complex 3D point spread functions with deep residual neural networks. Appl. Phys. Lett. 2019, 115, 251106. [Google Scholar] [CrossRef] [PubMed]
- Dumont, M.; Correia, C.; Sauvage, J.-F.; Schwartz, N.; Gray, M.; Beltramo-Martin, O.; Cardoso, J. Deep learning for space-borne focal-plane wavefront sensing. In Proceedings of the Space Telescopes and Instrumentation 2022: Optical, Infrared, and Millimeter Wave, Montréal, QC, Canada, 17−23 July 2022; pp. 1107–1114. [Google Scholar]
- Acton, D.S.; Atcheson, P.D.; Cermak, M.; Kingsbury, L.K.; Shi, F.; Redding, D.C. James Webb Space Telescope wavefront sensing and control algorithms. In PProceedings of the Optical, Infrared, and Millimeter Space Telescopes, Glasgow, UK, 21−25 June 2004; pp. 887–896. [Google Scholar]
- Bailén, F.J.; Suárez, D.O.; Rodríguez, J.B.; Del Toro Iniesta, J. Optimal Defocus for Phase Diversity Wave Front Retrieval. Astrophys. J. Suppl. Ser. 2022, 263, 8. [Google Scholar] [CrossRef]
- Paxman, R.G.; Thelen, B.J.; Seldin, J.H. Phase-diversity correction of turbulence-induced space-variant blur. Opt. Lett. 1994, 19, 1231–1233. [Google Scholar] [CrossRef] [PubMed]
- Bolcar, M.R.; Fienup, J.R. Sub-aperture piston phase diversity for segmented and multi-aperture systems. Appl. Opt. 2009, 48, A5–A12. [Google Scholar] [CrossRef]
- Fienup, J.R. Phase retrieval algorithms: A comparison. Appl. Opt. 1982, 21, 2758–2769. [Google Scholar] [CrossRef]
- Patwardhan, V. Solution of a NxN System of Linear algebraic Equations: 1—The Steepest Descent Method Revisited. arXiv 2022, arXiv:2206.07482. [Google Scholar]
- Rondeau, X.; Thiébaut, E.; Tallon, M.; Foy, R. Phase retrieval from speckle images. JOSA A 2007, 24, 3354–3365. [Google Scholar] [CrossRef] [PubMed]
- Johnson, P.M.; Goda, M.E.; Gamiz, V.L. Multiframe phase-diversity algorithm for active imaging. JOSA A 2007, 24, 1894–1900. [Google Scholar] [CrossRef]
- Broyden, C.G. Quasi-Newton methods and their application to function minimisation. Math. Comput. 1967, 21, 368–381. [Google Scholar] [CrossRef]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]
- Zernike, V.F. Beugungstheorie des schneidenver-fahrens und seiner verbesserten form, der phasenkontrastmethode. Physica 1934, 1, 689–704. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | C4 | C5 | C6 | C7 | RMSE | |
| True value | −0.0090 | −0.1847 | 0.0539 | 0.0699 | ||
| A | 0.0069 | −0.1792 | 0.0463 | 0.0902 | 0.0103 | |
| B | 0.0204 | −0.1675 | 0.0490 | 0.0726 | 0.0140 | |
| C | 0.0184 | −0.1706 | 0.0560 | 0.0687 | 0.0126 | |
| D | 0.0165 | −0.2076 | 0.0423 | 0.0792 | 0.0149 | |
| (b) | C4 | C5 | C6 | C7 | RMSE | |
| True value | −0.0526 | 0.0636 | 0.0837 | 0.0306 | ||
| A | −0.0406 | 0.0785 | 0.0775 | 0.0285 | 0.0081 | |
| B | −0.0438 | 0.0787 | 0.0553 | 0.0199 | 0.0129 | |
| C | −0.0453 | 0.0814 | 0.0787 | 0.0200 | 0.0089 | |
| D | −0.0688 | 0.0841 | 0.0558 | 0.0215 | 0.0149 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Ju, G.; Guo, L.; Xu, B.; Bai, X.; Jiang, F.; Xu, S. Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm. Sensors 2023, 23, 4966. https://doi.org/10.3390/s23104966
Zhang H, Ju G, Guo L, Xu B, Bai X, Jiang F, Xu S. Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm. Sensors. 2023; 23(10):4966. https://doi.org/10.3390/s23104966
Chicago/Turabian StyleZhang, Haoyuan, Guohao Ju, Liang Guo, Boqian Xu, Xiaoquan Bai, Fengyi Jiang, and Shuyan Xu. 2023. "Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm" Sensors 23, no. 10: 4966. https://doi.org/10.3390/s23104966
APA StyleZhang, H., Ju, G., Guo, L., Xu, B., Bai, X., Jiang, F., & Xu, S. (2023). Fast High-Resolution Phase Diversity Wavefront Sensing with L-BFGS Algorithm. Sensors, 23(10), 4966. https://doi.org/10.3390/s23104966