An IoT-Enabled E-Nose for Remote Detection and Monitoring of Airborne Pollution Hazards Using LoRa Network Protocol

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
1.1. Motivation and Contributions
- An N-IGSS is proposed to detect and monitor airborne pollution hazards in indoor ambient air using an RDPS.
- For the first time, a LoRa WAN networking link protocol was used for real-time networked operation of e-noses.
- The proposed N-IGSS was designed using a two-stage analysis space transformation method to ensure that the classifier models delivered high performance.
1.2. Paper Structure
2. Materials and Methods
2.1. The Contextual Background of the N-IGSS
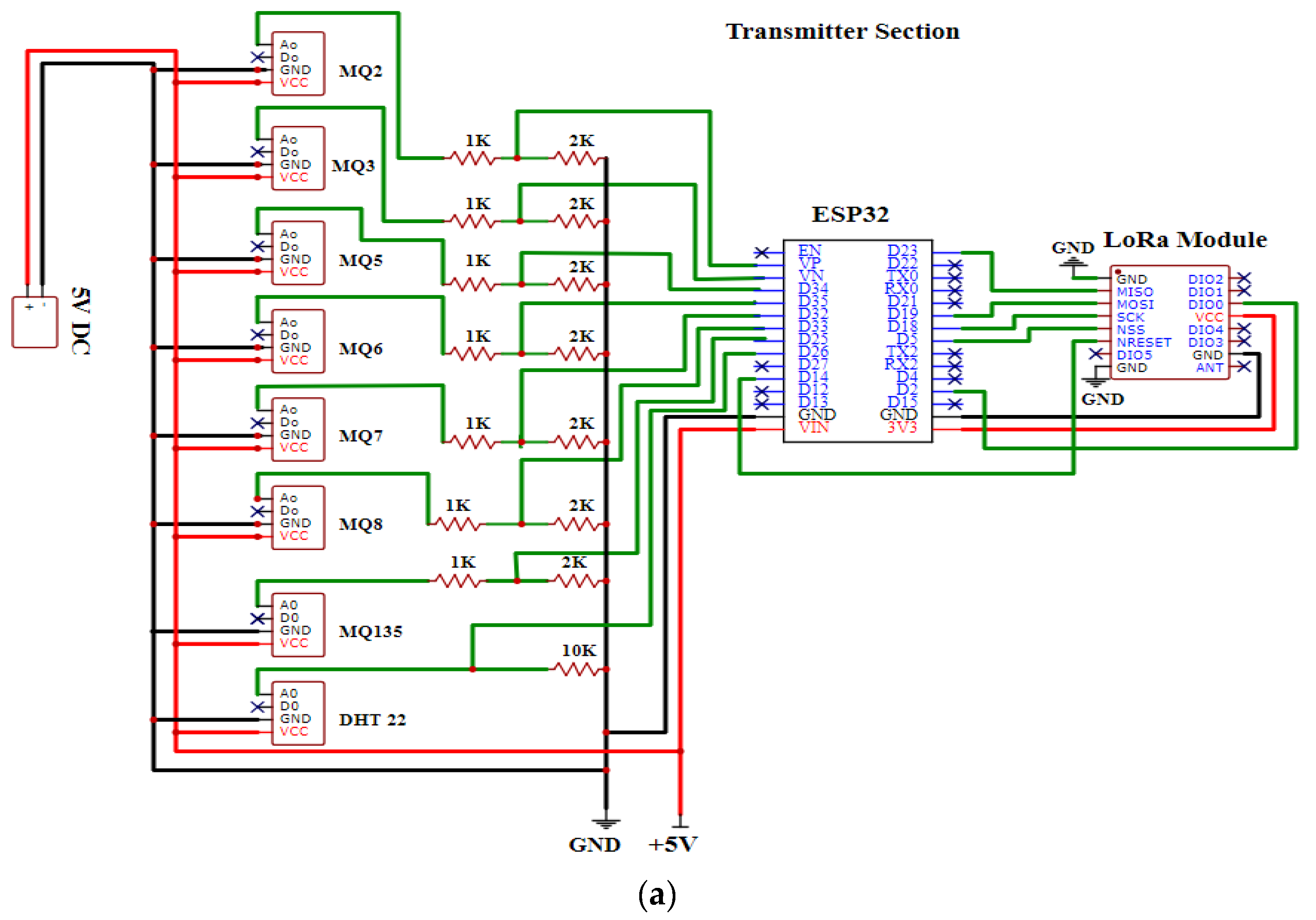
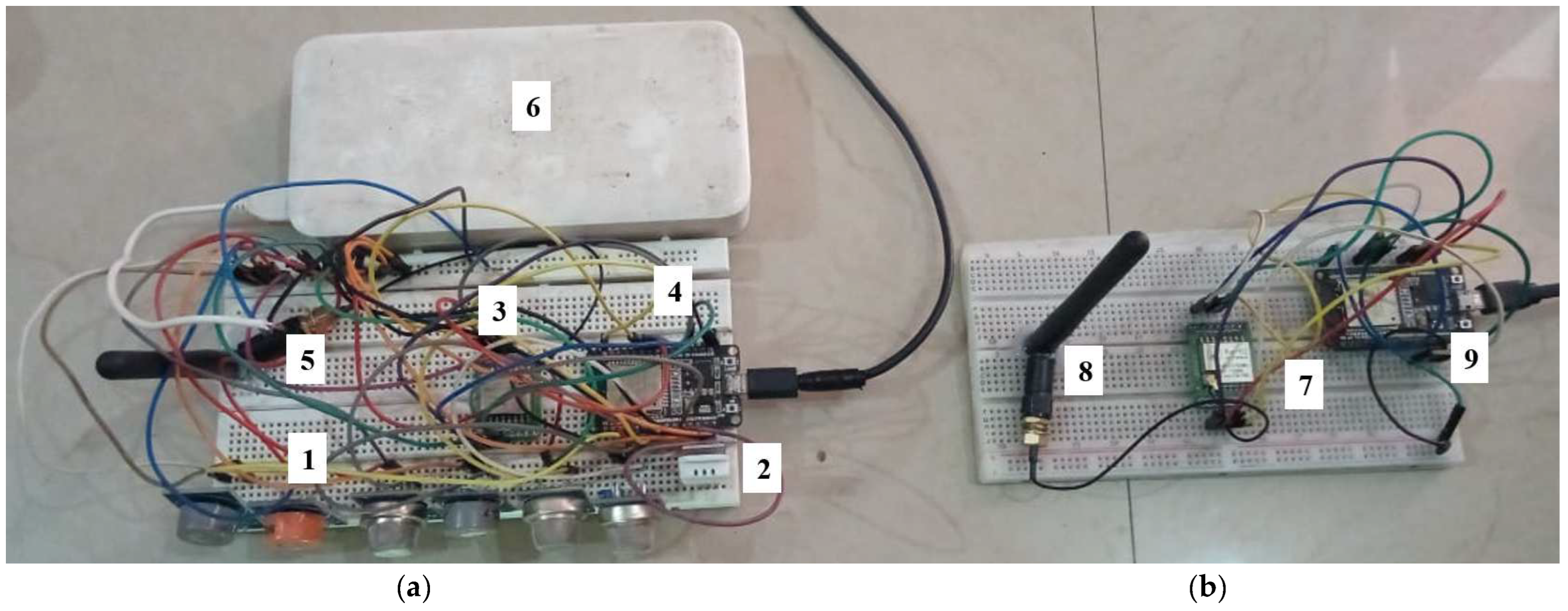
2.2. The Gas Sensor Node Prototype
2.3. Experimental Setup
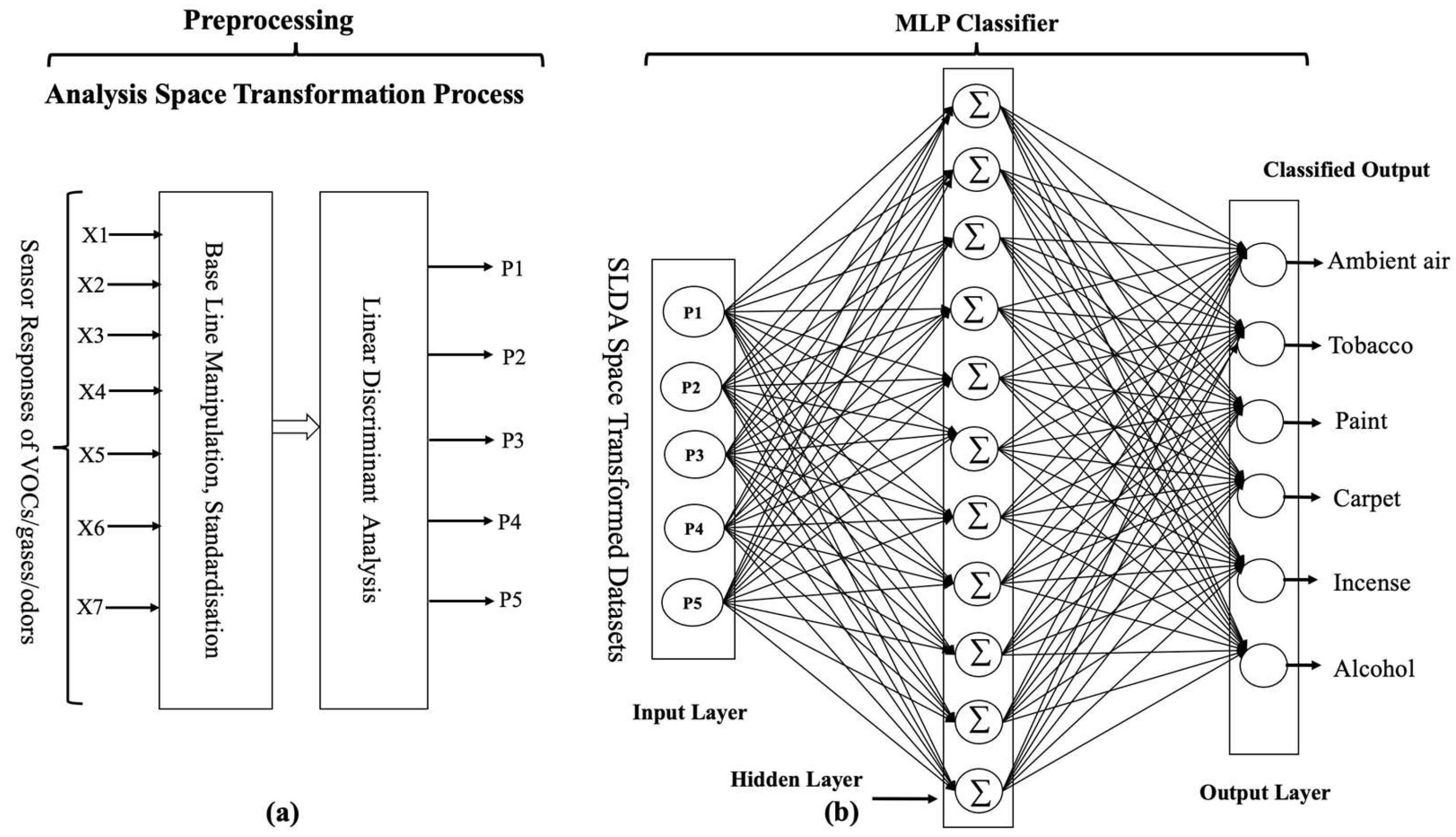
2.4. Contextual Background of Analysis Space Transformation
2.4.1. Data Preprocessing
- Calculate the mean vector, mi (i = 1,2,3…) of each class of a dataset
- Scatter matrix within the classwhere SW= data points within each class that deviate from their respective class.where Si = scatter matrix of each class, x = data point, mi = mean vector, and T = transpose matrix.
- Calculate the covariance matrix by adding the scaling factor (1/(N − 1)) to the within-class scatter matrixwhere Ni = sample size of the VOC class (here = 300 × 6). We can now drop (Ni − 1) because all classes have an equal sample size.
- Scatter matrix between each class (SB):where m = overall mean, mi = sample mean, and Ni = sample size of the respective class.
- Compute the eigenvectors and eigenvalues:where λ = eigenvalue and V = eigenvector of same eigenvalue
- Project the data onto the new subspace:where X = n-dimension matrix representation of the n samples and Y = transmitted n × k dimensional samples in the new subspace.Y = X × W
2.4.2. Design of the Classifiers
3. Results and Discussion
3.1. The LoRa Network Link Performance
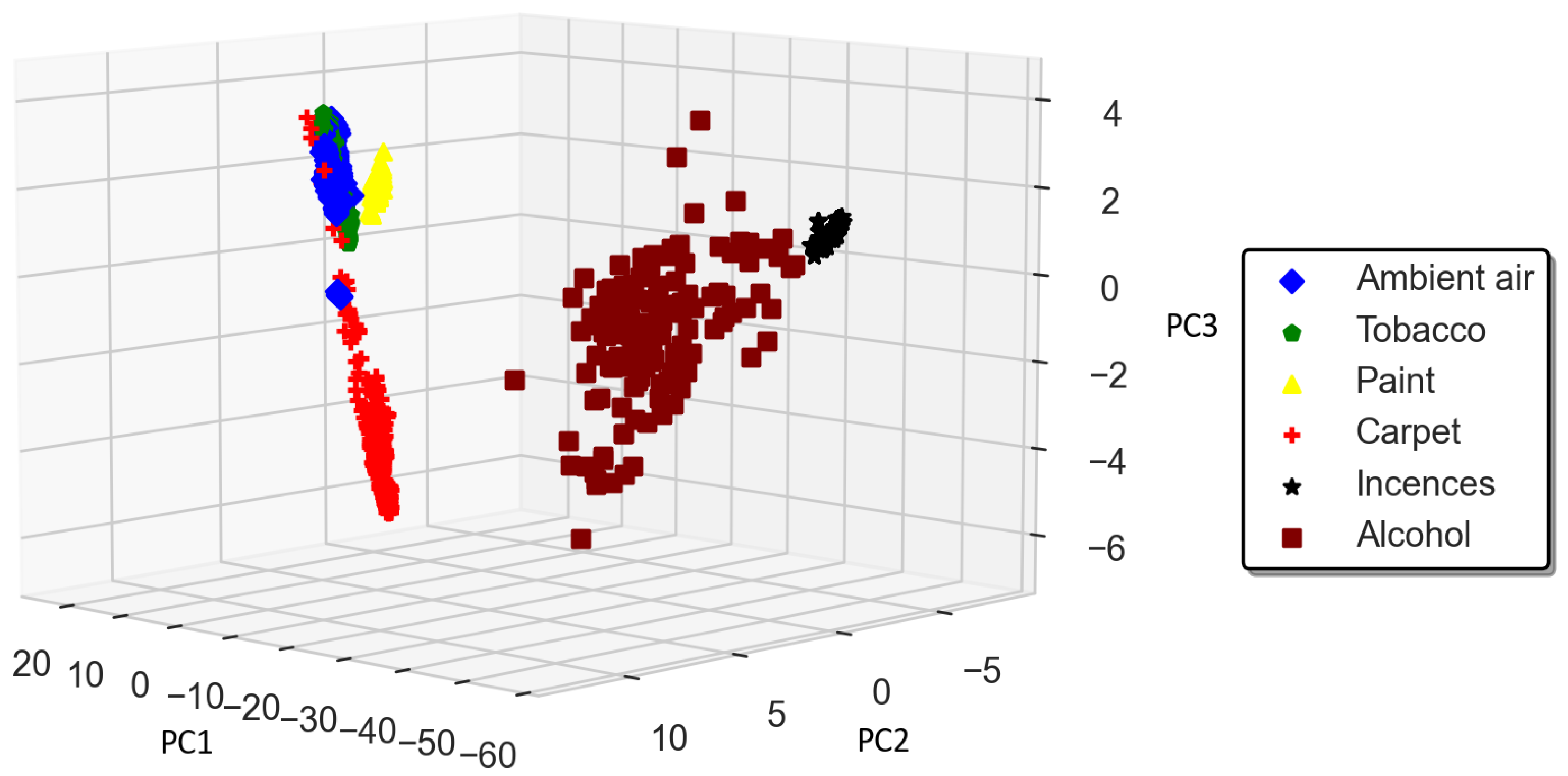
3.2. Performance of the Proposed N-IGSS for Airborne Pollution Hazard Detection
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CSS | Chirp spread spectrum |
| E-nose | Electronic nose |
| FCC | Federal Communications Commission |
| IDC | International Data Corporation |
| IGSS | Intelligent gas sensor system |
| IoT | Internet of Things |
| ISM | Industrial, scientific, and medical |
| LPWAN | Low-power wide-area networks |
| LoRa | Long range |
| MSE | Mean squared error |
| RF | Radio frequency |
| RF | Random Forest |
| RSSI | Received signal strength indicator |
| SNR | Signal-to-noise ratio |
| SLDA | Standardized linear discriminant analysis |
| SPI | Serial peripheral interface |
| VOCs | Volatile organic compounds |
References
- WHO. Household Air Pollution and Health. Available online: https://www.who.int/en/news-room/factsheets/detail/household-air-pollution-and-health (accessed on 28 January 2020).
- Kumar, P.; Imam, B. Footprints of air pollution and changing environment on the sustainability of built infrastructure. Sci. Total. Environ. 2013, 444, 85–101. [Google Scholar] [CrossRef] [PubMed]
- Hromadka, J.; Korposh, S.; Partridge, M.C.; James, S.W.; Davis, F.; Crump, D.; Tatam, R.P. Multi-parameter measurements using optical fibre long period gratings for indoor air quality monitoring. Sens. Actuat. B Chem. 2017, 244, 217–225. [Google Scholar] [CrossRef]
- Kureshi, R.R.; Thakker, D.; Mishra, B.K.; Barnes, J. From Raising Awareness to a Behavioural Change: A Case Study of Indoor Air Quality Improvement Using IoT and COM-B Model. Sensors 2023, 23, 3613. [Google Scholar] [CrossRef] [PubMed]
- Shahjalal, M.; Hasan, M.K.; Islam, M.M.; Alam, M.M.; Ahmed, M.F.; Jang, Y.M. An over-view of AI-enabled remote smart-home monitoring system using LoRa. In Proceedings of the 2020 International Conference on Artificial Intel-ligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 510–513. [Google Scholar]
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Rajput, N.; Das, R.; Mishra, V.; Singh, K.; Dwivedi, R. A neural net implementation of SPCA pre-processor for gas/odor classification using the responses of thick film gas sensor array. Sens. Actuators B Chem. 2010, 148, 550–558. [Google Scholar] [CrossRef]
- Mishra, A.; Rajput, N.S.; Han, G. NDSRT: An Efficient Virtual Multi-Sensor Response Transformation for Classification of Gases/Odors. IEEE Sens. J. 2017, 17, 3416–3421. [Google Scholar] [CrossRef]
- Chaudhri, S.N.; Rajput, N.S.; Mishra, A. A novel principal component-based virtual sensor approach for efficient classification of gases/odors. J. Electr. Eng. 2022, 73, 108–115. [Google Scholar] [CrossRef]
- Morin, E.; Maman, M.; Guizzetti, R.; Duda, A. Comparison of the Device Lifetime in Wireless Networks for the Internet of Things. IEEE Access 2017, 5, 7097–7114. [Google Scholar] [CrossRef]
- Tosi, J.; Taffoni, F.; Santacatterina, M.; Sannino, R.; Formica, D. Performance Evaluation of Bluetooth Low Energy: A Systematic Review. Sensors 2017, 17, 2898. [Google Scholar] [CrossRef]
- Alvarez-Campana, M.; López, G.; Vázquez, E.; Villagrá, V.A.; Berrocal, J. Smart CEI moncloa: An iot-based platform for people flow and environmental monitoring on a Smart University Campus. Sensors 2017, 17, 2856. [Google Scholar] [CrossRef]
- Salamone, F.; Danza, L.; Meroni, I.; Pollastro, M.C. A Low-Cost Environmental Monitoring System: How to Prevent Systematic Errors in the Design Phase through the Combined Use of Additive Manufacturing and Thermographic Techniques. Sensors 2017, 17, 828. [Google Scholar] [CrossRef]
- Popa, A.; Hnatiuc, M.; Paun, M.; Geman, O.; Hemanth, D.J.; Dorcea, D.; Ghita, S. An intelligent IoT-based food quality monitoring approach using low-cost sensors. Symmetry 2019, 11, 374. [Google Scholar] [CrossRef]
- Marques, G.; Pitarma, R. A Cost-Effective Air Quality Supervision Solution for Enhanced Living Environments through the Internet of Things. Electronics 2019, 8, 170. [Google Scholar] [CrossRef]
- Tirler, W.; Settimo, G. Incense, sparklers and cigarettes are significant contributors to indoor benzene and particle levels. Ann. Dell’istituto Super. Sanita 2015, 51, 28–33. [Google Scholar]
- Suriano, D.; Prato, M. An Investigation on the Possible Application Areas of Low-Cost PM Sensors for Air Quality Monitoring. Sensors 2023, 23, 3976. [Google Scholar] [CrossRef] [PubMed]
- De Capua, C.; Fulco, G.; Lugarà, M.; Ruffa, F. An Improvement Strategy for Indoor Air Quality Monitoring Systems. Sensors 2023, 23, 3999. [Google Scholar] [CrossRef]
- Cohen, R.; Sexton, K.G.; Yeatts, K.B. Hazard assessment of United Arab Emirates (UAE) incense smoke. Sci. Total. Environ. 2013, 458, 176–186. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zheng, X.; Stevanovic, S.; Xiang, Z.; Liu, J.; Shi, H.; Yu, M.; Zhu, C. Characterizing pollutant emissions from mosquito repellents incenses and implications in risk assessment of human health. Chemosphere 2018, 191, 962–970. [Google Scholar] [CrossRef]
- Almalki, F.A.; Alsamhi, S.H.; Sahal, R.; Hassan, J.; Hawbani, A.; Rajput, N.S.; Saif, A.; Morgan, J.; Breslin, J. Green IoT for Eco-Friendly and Sustainable Smart Cities: Future Directions and Opportunities. Mob. Netw. Appl. 2021, 1–25. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, W.; Hawbani, A.; Liu, P.; Zhao, L.; Alsamhi, S.H. A Dynamic Opportunistic Routing Protocol for Asynchronous Duty-Cycled WSNs. IEEE Trans. Sustain. Comput. 2023, 1–14. [Google Scholar] [CrossRef]
- Persaud, K.; Dodd, G. Analysis of discrimination mechanisms in the mammalian olfactory system using a model nose. Nature 1982, 299, 352–355. [Google Scholar] [CrossRef]
- Schlink, U.; Thiem, A.; Kohajda, T.; Richter, M.; Strebel, K. Quantile regression of indoor air concentrations of volatile organic compounds (VOC). Sci. Total. Environ. 2010, 408, 3840–3851. [Google Scholar] [CrossRef] [PubMed]
- Rösch, C.; Kohajda, T.; Röder, S.; von Bergen, M.; Schlink, U. Relationship between sources and patterns of VOCs in indoor air. Atmos. Pollut. Res. 2014, 5, 129–137. [Google Scholar] [CrossRef]
- Cao, M.; Ling, X. Quantitative Comparison of Tree Ensemble Learning Methods for Perfume Identification Using a Portable Electronic Nose. Appl. Sci. 2022, 12, 9716. [Google Scholar] [CrossRef]
- Srivastava, S.; Chaudhri, S.N.; Rajput, N.S.; Alsamhi, S.H.; Shvetsov, A.V. Spatial Upscaling-Based Algorithm for Detection and Estimation of Hazardous Gases. IEEE Access 2023, 11, 17731–17738. [Google Scholar] [CrossRef]
- Chaudhri, S.N.; Rajput, N.S.; Alsamhi, S.H.; Shvetsov, A.V.; Almalki, F.A. Zero-padding and spatial augmentation-based gas sensor node optimization approach in resource-constrained 6G-IoT paradigm. Sensors 2022, 22, 3039. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Technologies | Topology | Coverage Range | Power Consumption | Radio Frequency | Tx- Rx Data Size | Limitations/ Advantages |
|---|---|---|---|---|---|---|
| BLE | Ad-hoc | 10–100 m | 15–30 mA per packet | 2.4 GHz–2.4835 GHz | 1–3 Mbps | Short range |
| Wi-Fi | Star | 50–100 m | 2 to 20 watts | 2.4 GHz–5 GHz | 1–9608 Mbps | Short distance, high battery power |
| ZigBee | Mesh | 10–100 m | 150 mA | 868.3 MHz, 902–928 MHz | 20–250 kbps | Short distance, maintenance costs too much |
| Sigfox | Star | 20–25 km | 78 mA | 862–928 MHz | 100 bps | High module costs, high battery power |
| LoRa | Star/ Mesh | 10–20 km | 32 mA | 433 MHz, 860–1020 MHz | 290 bps–50 kbps | More extended range, low battery power |
| List of Components | Input Voltage | Power Ratings |
|---|---|---|
| LoRa Module (SX1278) | 3.3 V | Tx: 93 mA, Rx: 12.15 mA, standby: 1.6 mA |
| ESP 32 Microcontroller | 5 V | 130 mA |
| ESP 32 GPIO pins | 3.3 V | 40 mA |
| MQ Sensor | 5 V | 150 mA |
| DHT-22 | 5 V | 2.5 mA |
| Raw Materials | Sampling Time (min) | Total Samples | Training Samples | Testing Samples | Class |
|---|---|---|---|---|---|
| Ambient air | 20 | 300 | 295 | 5 | 1 |
| Tobacco | 20 | 300 | 295 | 5 | 2 |
| Paints | 20 | 300 | 295 | 5 | 3 |
| Carpet | 20 | 300 | 295 | 5 | 4 |
| Incense | 20 | 300 | 295 | 5 | 5 |
| Alcohol | 20 | 300 | 295 | 5 | 6 |
| Total | 120 | 1800 | 1770 | 30 |
| Classifier | Parameters |
|---|---|
| AdaBoost | N_estimators:0.5, learning rate: 50, random_state:1, cv = 5 |
| XGBoost | Learning_rate:0.1, n_estimators:1000, max_depth:4, min_child_weight:6, gamma = 0, reg_alpha:0.005, nthread:4, cv = 5 |
| RF | N_estimators:100, criterion: Gini, random_state:1, cv = 5 |
| MLP | Hidden layer sizes = 11, activation function: ReLU, solver: adam, batch size:100, learning rate: adaptive, max iteration: 100, cv = 5 |
| Classifier | Accuracy (%) |
|---|---|
| AdaBoost | 96.67 |
| XGBoost | 96.67 |
| RF | 96.67 |
| MLP | 100 |
| Class | MSE | MAE | ||
|---|---|---|---|---|
| LDA | Proposed Method | LDA | Proposed Method | |
| Ambient air | 4.62 × 10−4 | 1.42 × 10−4 | 1.003 × 10−2 | 7.53 × 10−2 |
| Tobacco | 5.38 × 10−4 | 4.51 × 10−4 | 1.74 × 10−2 | 1.41 × 10−2 |
| Paints | 3.39 × 10−4 | 5.05 × 10−4 | 1.44 × 10−2 | 1.73 × 10−2 |
| Carpet | 6.53 × 10−3 | 1.53 × 10−3 | 3.02 × 10−2 | 2.29 × 10−2 |
| Incense | 1.02 × 10−3 | 8.94 × 10−4 | 2.39 × 10−2 | 2.21 × 10−2 |
| Alcohol | 1.65 × 10−2 | 1.24 × 10−2 | 8.82 × 10−2 | 8.37 × 10−2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, K.; Chaudhri, S.N.; Rajput, N.S.; Shvetsov, A.V.; Sahal, R.; Alsamhi, S.H. An IoT-Enabled E-Nose for Remote Detection and Monitoring of Airborne Pollution Hazards Using LoRa Network Protocol. Sensors 2023, 23, 4885. https://doi.org/10.3390/s23104885
Kumar K, Chaudhri SN, Rajput NS, Shvetsov AV, Sahal R, Alsamhi SH. An IoT-Enabled E-Nose for Remote Detection and Monitoring of Airborne Pollution Hazards Using LoRa Network Protocol. Sensors. 2023; 23(10):4885. https://doi.org/10.3390/s23104885
Chicago/Turabian StyleKumar, Kanak, Shiv Nath Chaudhri, Navin Singh Rajput, Alexey V. Shvetsov, Radhya Sahal, and Saeed Hamood Alsamhi. 2023. "An IoT-Enabled E-Nose for Remote Detection and Monitoring of Airborne Pollution Hazards Using LoRa Network Protocol" Sensors 23, no. 10: 4885. https://doi.org/10.3390/s23104885
APA StyleKumar, K., Chaudhri, S. N., Rajput, N. S., Shvetsov, A. V., Sahal, R., & Alsamhi, S. H. (2023). An IoT-Enabled E-Nose for Remote Detection and Monitoring of Airborne Pollution Hazards Using LoRa Network Protocol. Sensors, 23(10), 4885. https://doi.org/10.3390/s23104885